
Scheduling Multiprocessor Tasks with Equal Processing Times as a Mixed Graph Coloring Problem



1
United Institute of Informatics Problems of the National Academy of Sciences of Belarus, 6 Surganov Street, 220012 Minsk, Belarus
2
Oskar-Maria-Graf-Gymnasium, Keltenweg 5, 85375 Neufahrn bei Freising, Germany
*
Author to whom correspondence should be addressed.
Algorithms 2021, 14(8), 246; https://0-doi-org.brum.beds.ac.uk/10.3390/a14080246
Submission received: 16 July 2021
/
Revised: 10 August 2021
/
Accepted: 13 August 2021
/
Published: 19 August 2021
(This article belongs to the Special Issue 2021 Selected Papers from Algorithms Editorial Board Members)
Abstract
:This article extends the scheduling problem with dedicated processors, unit-time tasks, and minimizing maximal lateness for integer due dates to the scheduling problem, where along with precedence constraints given on the set of the multiprocessor tasks, a subset of tasks must be processed simultaneously. Contrary to a classical shop-scheduling problem, several processors must fulfill a multiprocessor task. Furthermore, two types of the precedence constraints may be given on the task set . We prove that the extended scheduling problem with integer release times of the jobs to minimize schedule length may be solved as an optimal mixed graph coloring problem that consists of the assignment of a minimal number of colors (positive integers) to the vertices of the mixed graph such that, if two vertices and are joined by the edge , their colors have to be different. Further, if two vertices and are joined by the arc , the color of vertex has to be no greater than the color of vertex . We prove two theorems, which imply that most analytical results proved so far for optimal colorings of the mixed graphs , have analogous results, which are valid for the extended scheduling problems to minimize the schedule length or maximal lateness, and vice versa.
1. Introduction
The world of manufacturing includes the following two main groups: custom manufacturing and mass production. In custom manufacturing, the quantity of the produced items may be small. Such production is highly flexible to enable a customization to the specific needs of the clients. Consequently, humans mostly perform custom manufacturing. Conversely, high automation characterizes scenarios of mass production, which consists of a fixed order of operations, uniform (equal) operation durations, a lack of the process flexibility, and an absorption of costs derived from the defective production units [1].
In our article, we focus on the above mass production, which presupposes the scheduling problems with unit processing times of the jobs to minimize either makespan Cmax (the schedule length) or maximal lateness Lmax. Scheduling models with equal (unit) processing times of the jobs are an approximation for coping with the mass-industrial productions and manufactures of similar items, particularly for job-shop manufacturing that allows a manager to personalize an individual item [2].
Unit-time shop-scheduling problems to minimize the makespan are equivalent to an optimal graph coloring problem that consists of assigning a minimal number of colors to the vertices of a graph such that no two adjacent vertices have the same color.
If a unit-time, shop-scheduling problem requires both precedence and incompatibility constraints; a mixed graph coloring [3] allows modeling such a shop-scheduling problem. Since publishing article [3], many studies on the unit-time shop-scheduling problems with minimizing the makespan are based on mixed graph colorings.
Let denote a mixed graph with the set of the vertices placed at the first position in parenthesis, the set of the arcs at the second position, and the set of the edges at the third position. The arc is an ordered pair of vertices and , while the edge is an unordered pair of vertices and . If the equality holds, one has a graph . If the equality holds, one has a digraph . A mixed graph under consideration contains no multiple arcs, no multiple edges, and no loops.
Article [3] introduces an optimal mixed graph coloring problem as follows.
Definition 1 ([3]).
An integer-valued functionis called a coloringof the mixed graphif the non-strict inequalityholds for each arcand the relationholds for each edge. A mixed graph coloringis optimal if it uses a minimal numberof different colors; such a minimal numberof the used colors being called a chromatic number of the mixed graph.
If the equality holds, the coloring is a usual coloring of the vertices of the graph . Contrary to coloring of the vertices of the graph that exists for any graph , a mixed graph may be un-colorable; see the following criterion proved in [3].
Theorem 1 ([3]).
A coloringof the mixed graphexists if and only if the digraphhas no circuit containing adjacent vertices in the graph.
The mixed graph is colorable if there exists a coloring of the mixed graph ; otherwise, the mixed graph is un-colorable.
In articles [4,5], it is shown that a job-shop scheduling problem with unit processing times of the operations and the minimization of the makespan may be represented as an optimal coloring of the specified mixed graph .
Finding an optimal coloring of the mixed graph is an NP-hard problem even if the equality holds [6].
In article [7], it is shown that any job-shop scheduling problem with unit processing times of the operations to minimize the total completion time may be represented as a mixed graph coloring with the minimization of the sum of colors of path-endpoints in the mixed graph ; see [8,9]. Hereafter, denotes a completion time of the job . The unit-time scheduling problem with the minimization of the makespan is NP-hard even for three dedicated machines [10]. The unit-time job-shop scheduling problem with the minimization of the total completion time is also NP-hard [11].
Articles [12,13,14,15] investigate the complexity of the job-shop scheduling problem with a fixed number of jobs and a fixed number of machines, provided that a job may be processed several times by the same machine. Articles [13,16] investigate the complexity of the job-shop scheduling problems with any fixed regular objective function. Articles [17,18,19,20,21,22,23] study different types of connections between mixed graph colorings and unit-time shop-scheduling problems. Article [24] is a survey on the mixed graph coloring problems and the equivalent unit-time shop-scheduling problems.
In this article, we show that any optimal coloring of the mixed graph is equivalent to finding an optimal schedule for the corresponding partially ordered multiprocessor tasks with unit processing times and the minimization of maximal lateness Lmax. Contrary to a classical shop-scheduling problem, several dedicated machines must process a multiprocessor task. Along with two types of the precedence constraints given on the set of the multiprocessor tasks, it is necessary to process a specified subset of the tasks simultaneously.
The equivalence of the considered scheduling problems and the corresponding mixed graph coloring problems implies that most analytical results and algorithms developed for a wide class of the shop-scheduling problems generate analogous results and algorithms for optimal mixed graph colorings , and vice versa.
2. Closed Results Published on the Mixed Graph Coloring Problems and the Equivalent Unit-Time Shop-Scheduling Problems to Minimize the Makespan
To classify different scheduling problems, one can use a three-field notation introduced in [29], where field specifies a processing system along with a machine number, field job characteristics, and field an objective function [28].
2.1. A Unit-Time Minimum-Length Job-Shop Scheduling Problem
We first consider the following job-shop scheduling problem with unit processing times of the given operations and the objective criterion Cmax to minimize the makespan. In the job-shop scheduling problem , a set of the jobs must be optimally processed on the different (dedicated) machines . A job consists of the set of the linearly ordered operations: . A specified machine from the set is required to process (without preemptions) the operation from the set . The processing time of each operation in the set is equal to 1.
Let the set denote a set of all operations processed by machine . Any pair of the operations processed by the same machine cannot be processed simultaneously in any feasible schedule.
In order to solve the job-shop scheduling problem , it is necessary to find a non-preemptive schedule (each operation must be processed without preemptions), whose length (the makespan) is minimum among lengths of all feasible schedules, where the completion time of the job is equal to the completion time of the last operation of the job .
In articles [4,5,8,9], it is shown that the job-shop scheduling problem may be represented as an optimal coloring of the specified mixed graph . Based on Definition 1, one can represent every job as a union of the path in the directed subgraph of the mixed graph and the chain in the subgraph . As a result, we determine the vertex set of the mixed graph , the set of the arcs , and the subset of the edge set , which are defined based on the following implications:
Due to Definition 1, the remaining subset of the edges in the subgraph of the mixed graph is determined by cliques , where the set consists of all operations processed by machine . Due to this, any pair of operations from the set cannot be processed simultaneously. It is clear that the constructed mixed graph determines the complete input date for the job-shop scheduling problem ; see articles [4,5] for details. Thus, one can call such a scheduling problem as a job-shop scheduling problem on the mixed graph .
Article [4] shows that if the mixed graph determines the input date for the job-shop scheduling problem , then this mixed graph must possess the following mandatory properties.
Property 1.
The following partition: =
… holds, where each directed subgraph of the mixed graph is a path for each index .
Property 2.
Edge belongs to the set if and only if the implication (1) holds.
Property 3.
The following partition: = …
holds, where each subgraph of the mixed graph is a complete graph for each index .
Article [4] contains the proof of the following theorem.
Theorem 2 ([4]).
Any job-shop scheduling problemon mixed graphis equivalent to optimal coloringof the mixed graph. Conversely, any optimal coloringof mixed graphpossessing properties 1–3 is equivalent to a job-shop scheduling problemon the mixed graph
To illustrate Theorem 2, we consider the following Example 1 of the job-shop scheduling problem with four jobs and five machines; see Figure 1.
Example 1.
The machine set have to process the job set , where the job includes the set = of the linearly ordered operations: . The job is represented by a union of the path in the digraph and the chain in the graph . The job includes the set = of the linearly ordered operations: . The job is represented by a union of the path in the digraph and the chain in the graph . The job includes the set = of the linearly ordered operations: . The job is represented by a union of the path in the digraph and the chain in the graph . The job includes the set = of the linearly ordered operations: . The job is represented by a union of the path in the digraph and the chain in the graph The set = is a set of operations processed by machine .
In Figure 1, the forbiddance to process the operations from the set simultaneously is determined by the clique in the graph . Machine processes the operations = . The forbiddance to process a pair of operations from the set simultaneously is determined by the clique . Machine processes the operations = . The forbiddance to process operations from the set simultaneously is determined by the clique . Machine processes the operations = . The forbiddance to process a pair of operations from the set simultaneously is determined by the clique . Machine processes the operations = . The forbiddance to process a pair of operations from the set simultaneously is determined by the clique .
In Figure 1, a specified color is used to indicate all operations processed by the same machine
Note that the mixed graph depicted in Figure 1 possesses properties 1–3. An optimal coloring of this mixed graph is determined as follows: , , , , . Due to Theorem 2, this coloring of the mixed graph determines an optimal schedule for the job-shop scheduling problem on the mixed graph depicted in Figure 1. Thus, the equalities hold.
2.2. A General Shop Unit-Time Scheduling Problem to Minimize the Makespan
The general shop scheduling problem is a generalization of the job-shop scheduling problem considered in Section 2.1. In the former problem , along with the linear orders given on the sets , , there are also given the precedence constraints between operations belonging to different jobs in the set . We next consider two types of the precedence constraints provided that the problem be modeled as a coloring of the mixed graph .
If the completion time of the operation of the job has to precede the start time of the operation of the job , where , then the mixed graph must contain both arc and edge . In what follows, we denote this type of the precedence constraints as: . Hence, if the precedence constraint holds for the general shop scheduling problem , then the implication (1) must hold for the arc , i.e., , where
If the start time of the operation of the job has to precede the start time of the operation of the job , where , then the mixed graph must contain only arc as an addition. In what follows, we denote this type of the precedence constraints as: . Hence, if the precedence constraint holds for the general shop scheduling problem , then the implication (1) does not hold for the arc .
Article [23] contains the proof of Theorem 3 on the connection between the mixed graph coloring problem and the general shop scheduling problem .
Theorem 3 ([23]).
Any general shop scheduling problemon the mixed graphis represented as an optimal coloringof the mixed graph.
Note that the inverse claim to Theorem 3 is not correct, i.e., there exists a problem of optimal coloring of the mixed graph, which cannot be represented as a general shop scheduling problem . We next consider Example 2 of the general shop scheduling problem on the mixed graph , which defers from the mixed graph depicted in Figure 1 by three arcs and one edge.
Example 2.
The general shop scheduling problem on the mixed graph is the same as Example 1 of the problem with only exception that there are precedence constraints between operations belonging to different jobs from the set . These additional precedence constraints are given as follows: ; ; and Thus, for the mixed graph , the following equalities hold: ; .
An optimal schedule for Example 2 is determined by the following optimal coloring of the mixed graph : , , , , . This coloring is optimal; . The optimality of the schedule determined by the coloring follows from the fact that the mixed graph includes the path , whose length is equal to 10. Thus, the inequality must hold.
2.3. Scheduling Multiprocessor Tasks with Unit Durations
Contrary to the above classical problems and , where a single machine (processor) fulfills an operation, in the processing system with multiprocessor tasks [28], a task (operation) requires either one machine or several machines during the fulfillment of the multiprocessor task (MPT for short). As usual, two tasks requiring at least one common machine cannot be processed simultaneously.
Chapter 10 of the book [28] (pp. 264–283) presents the complexity results for the general shop minimum-length scheduling problem with multiprocessor tasks. To solve the scheduling problem means to construct an optimal schedule for processing the partially ordered multiprocessor tasks (operations) by the machines .
There has been increasing interest in multiprocessor scheduling, i.e., in scheduling models, where tasks require several processors simultaneously. Many scheduling problems fit in this model and a large amount of research has been carried on theoretical multiprocessor scheduling. Due to a wide practical importance scheduling problems with multiprocessor tasks have attracted considerable attention from researchers; see [30,31,32,33,34,35,36,37,38,39,40,41]. The main part of article [34] is a presentation of the results in multiprocessor tasks scheduling both for parallel and for dedicated processors. The problems . with unit processing times have been considered in articles [30,31,32,33,34].
The general shop scheduling problem is a special case of the scheduling problem . Article [23] studies more general shop problem including the problem as a special case.
Let two types of the precedence constraints and be given in the problem . Furthermore, it is required that a subset of the tasks must be processed simultaneously. In order to present the latter requirement, a circuit is included to the directed subgraph of the mixed graph , where the following relations hold: .
Let the input data of the general shop problem include w subsets of the set such that all tasks in the set = , must be processed simultaneously in any feasible schedule. We obtain the following subset of the set of arcs:
Every example of the general shop scheduling problem uniquely determines a mixed graph with , which presents the input data for this example. Thus, to determine an example of the general shop scheduling problem , it is sufficient to determine the mixed graph for this example. Such an example is called a problem on the mixed graph . Article [23] contains the proofs of the following two theorems.
Theorem 4 ([23]).
A feasible schedule for the general shop scheduling problemon the mixed graphexits if and only if the digraphhas no circuit containing adjacent vertices in the graph.
Theorem 5 ([23]).
Any solvable general shop scheduling problemon the mixed graphis equivalent to finding an optimal coloringof the mixed graph. Conversely, for any colorable mixed graph, there exists a general shop scheduling problemon the mixed graph, which is equivalent to finding an optimal coloringof the mixed graph.
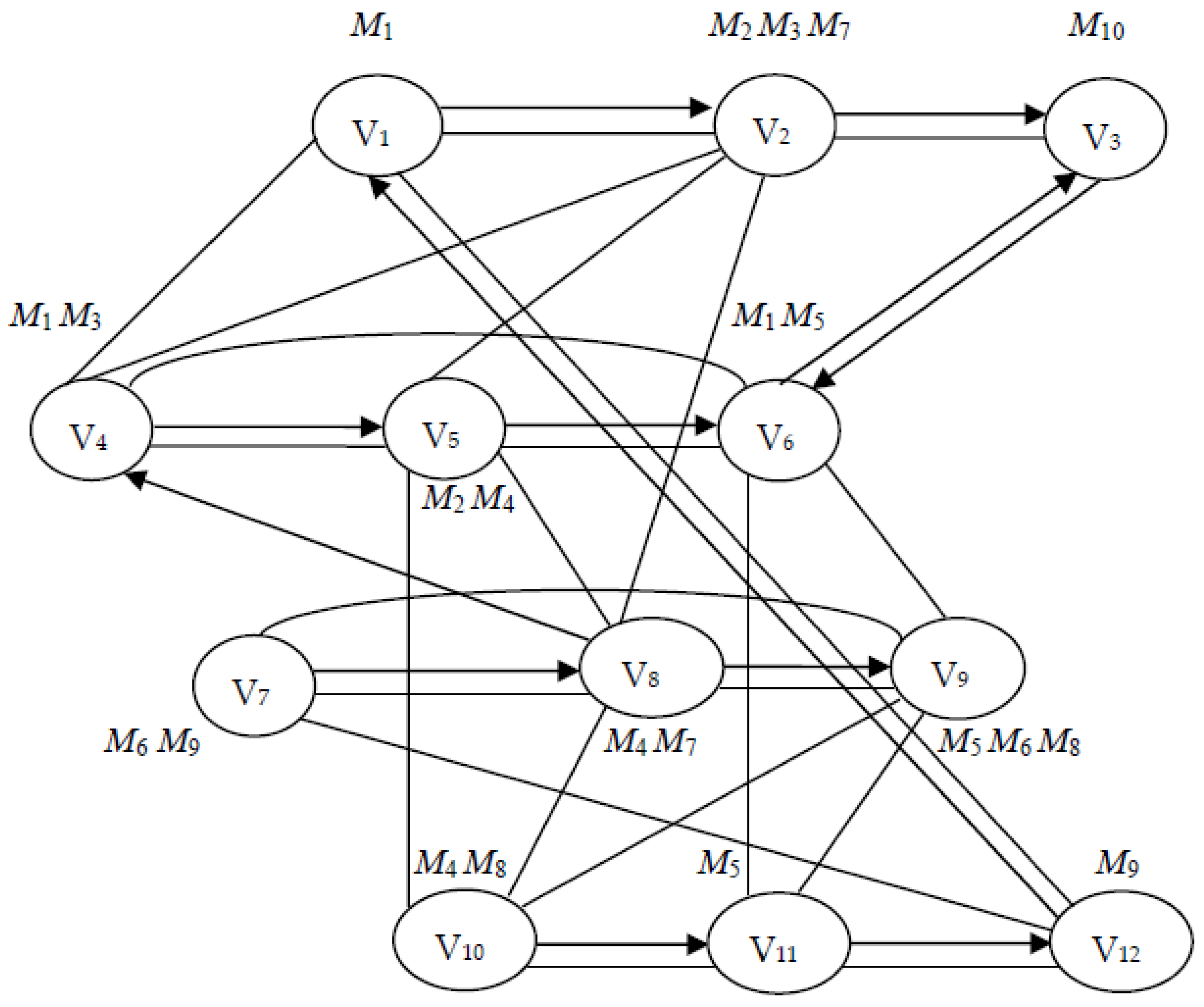
To illustrate Theorems 4 and 5, we consider Example 3 of the problem on the mixed graph presented in Figure 2. The job includes the set = of the linearly ordered operations: . In Figure 2, the job is presented by a union of the path in the digraph and the chain in the graph . The job includes the set = of the linearly ordered operations: . The job is presented by a union of the path in the digraph and the chain in the graph . The job includes the set = of the linearly ordered operations: . The job is presented by a union of the path in the digraph and the chain in the graph . The job includes the set = of the linearly ordered operations: . The job is presented by a union of the path in the digraph and the chain in the graph
Machine processes the operations = . In Figure 2, the forbiddance to process the operations from the set simultaneously is determined by the edge in the graph . Machine processes the operations = . The forbiddance to process the operations from the set simultaneously is determined by the edge . Machine processes the operations = . The forbiddance to process any pair of operations from the set simultaneously is determined by the edge . Machine processes the operations = . The forbiddance to process any pair of operations from the set simultaneously is determined by the clique in the graph . Machine M5 processes the operations = . The forbiddance to process any pair of operations from the set simultaneously is determined by the clique . Machine processes the operations = . The forbiddance to process the operations from the set simultaneously is determined by the edge . Machine processes the operations = . The forbiddance to process the operations from the set simultaneously is determined by the edge . Machine processes the operations = . The forbiddance to process the operations from the set simultaneously is determined by the edge . Machine processes the operations = . The forbiddance to process the operations from the set simultaneously is determined by the edge . Machine processes one operation = . The machines, which are used to process the task , are presented near the vertex in Figure 2.
The precedence relations between operations belonging to different jobs are given as follows: ; ; ; and . These precedence constraints are presented by arcs and edge .
The digraph has only one circuit and this circuit has no adjacent vertices in the graph Since the digraph has no circuit containing adjacent vertices in the graph , there exists a feasible schedule for Example 3 of the problem on the mixed graph ; see Theorem 4.
Due to Theorem 5, an optimal schedule for Example 3 is determined by the following optimal coloring of the mixed graph : , . The coloring is optimal; . The optimality of the schedule determined by the coloring follows from the fact that the mixed graph includes the path , whose length is equal to 6. Therefore, the non-strict inequality must hold.
3. Two Equivalent Problems of Scheduling Unit-Time Multiprocessing Tasks as Optimal Colorings of the Mixed Graphs
We next prove that any general shop scheduling problem with non-negative integer release times of the jobs is equivalent to an optimal coloring of the mixed graph . Since all release times are non-negative integer numbers, the input data for the general shop scheduling problem may be represented by the mixed graph . Thus, Theorem 4 is correct for this scheduling problem as well.
3.1. Scheduling Unit-Time Multiprocessing Tasks to Minimize the Makespan as an Optimal Mixed Graph Coloring Problem
In the general shop scheduling problem , a multiprocessor task may be regarded as a job . The job may include ether one task (operation) or more than one task (several operations).
Let a simple job be a job consisting of a single task (operation).
Theorem 6.
Any solvable general shop scheduling problemon the mixed graphis equivalent to finding an optimal coloringof the mixed graph. Conversely, for any colorable mixed graph, there exists a general shop scheduling problemon the mixed graph, which is equivalent to finding an optimal coloringof the mixed graph.
Proof.
Every solvable general shop scheduling problem defines a mixed graph presenting the input data for this problem. Using this mixed graph , we construct a mixed graph determining the input data for the general shop scheduling problem . To this end, for each job , we add vertices to the set and path , whose length is equal to , to the directed subgraph of the mixed graph . We also add the chain , whose length is equal to to the subgraph of the mixed graph . Let denote a mixed graph obtained from the mixed graph , where . It is easy to see that the constructed mixed graph determines the input data for the general shop scheduling problem . Since there is a feasible schedule for the general shop scheduling problem , the directed subgraph of the mixed graph has no circuit containing the adjacent vertices in the graph (due to Theorems 1 and 4). □
Any solvable example of the general shop scheduling problem on the mixed graph is equivalent to finding an optimal coloring of the mixed graph due to the correspondence of the terms used in the optimal coloring of the mixed graph and those used in the optimal schedule existing for this example of the general shop scheduling problem . Table 1 presents the correspondence of these terms.
Due to the existence of the clique in the graph , each machine in the general shop scheduling problem on the mixed graph can process at most one task within a unit-time semi-interval from the following set:
Furthermore, it is easy to see that an optimal coloring of the mixed graph determines the optimal assignment of the tasks to the following minimal number of the unit-time semi-intervals:
Such an assignment of the tasks (operations) to the minimal number of the unit-time semi-intervals (4) is optimal since it determines a feasible schedule for processing the tasks (operations) , whose length is equal to the chromatic number of the mixed graph that determines the input data for the general shop scheduling problem .
Due to the correspondence of terms used in the coloring of the mixed graph and those used in the general shop scheduling problem on the mixed graph (see Table 1), one can conclude that any solvable example of the general shop scheduling problem on the mixed graph is equivalent to finding an optimal coloring of the mixed graph .
Next, we prove the following converse claim: for any colorable mixed graph , there exists a general shop scheduling problem on the mixed graph , which is equivalent to finding an optimal coloring of the mixed graph . To this end, we detect a set of all circuits existing in the directed subgraph of the mixed graph and consider two possible cases.
Case I.
Let the set be empty; .
Then, the desired general shop scheduling problem on the mixed graph may be determined using the following Algorithm 1.
| Algorithm 1. Constructing the general shop scheduling problem , which is equivalent to the optimal coloring |
| Input: A mixed graph without circuits in the digraph . |
| Output: A general shop scheduling problem on the mixed graph , which is equivalent to finding an optimal coloring of the mixed graph . |
| Step 1: Partition the graph into maximum connected components: , where the subgraph is a maximum (with respect to the inclusion) connected component of the graph for each index such that . Let the subgraph determine an isolated vertex for each index . Denote this isolated vertex as: . Set , , , and . |
| Step 2: IF GOTO step 5 ELSE find all maximum (with respect to the inclusion) complete vertex-induced subgraphs of the graph and . |
| Step 3: FOR index , supplement machine to the already constructed machine set; . Establish that all tasks of the connected graph , where all tasks . |
| Step 4: IF THEN GOTO ELSE GOTO step 3. |
| Step 5: FOR, supplement machine to the already constructed machine set M; . Establish that task , , which is isolated in the graph , must be processed by machine . Set . |
| Step 6: FOR such that the implication (1) holds and , which means that processing the task must be completed before starting the task in any feasible schedule. |
| Step 7: FOR each arc such that the implication (1) does not hold, determine the precedence constraint , which means that processing the task must be started before the start time of the task in any feasible schedule. |
| Step 8: The desired general shop scheduling problem on the mixed graph is constructed, where the precedence constraints on the task set V are determined at step 6 and step 7. Further, the set M of the machines is determined at step 3 and step 5 STOP. |
Case II.
Let the set be not empty; .
Since the mixed graph is colorable, each circuit in the set has no adjacent vertices in the graph (due to Theorem 1). Thus, all tasks must be processed simultaneously in any feasible schedule existing for the general shop scheduling problem on the mixed graph , where the circuit exists in the directed subgraph .
Let . We delete all arcs determined in (2) from the mixed graph and apply Algorithm 1 to the obtained circuit-free mixed graph . As a result, we obtain the general shop scheduling problem on the mixed graph , which is equivalent to finding an optimal coloring of the mixed graph . Thus, the general shop scheduling problem on the mixed graph is equivalent to finding an optimal coloring of the mixed graph
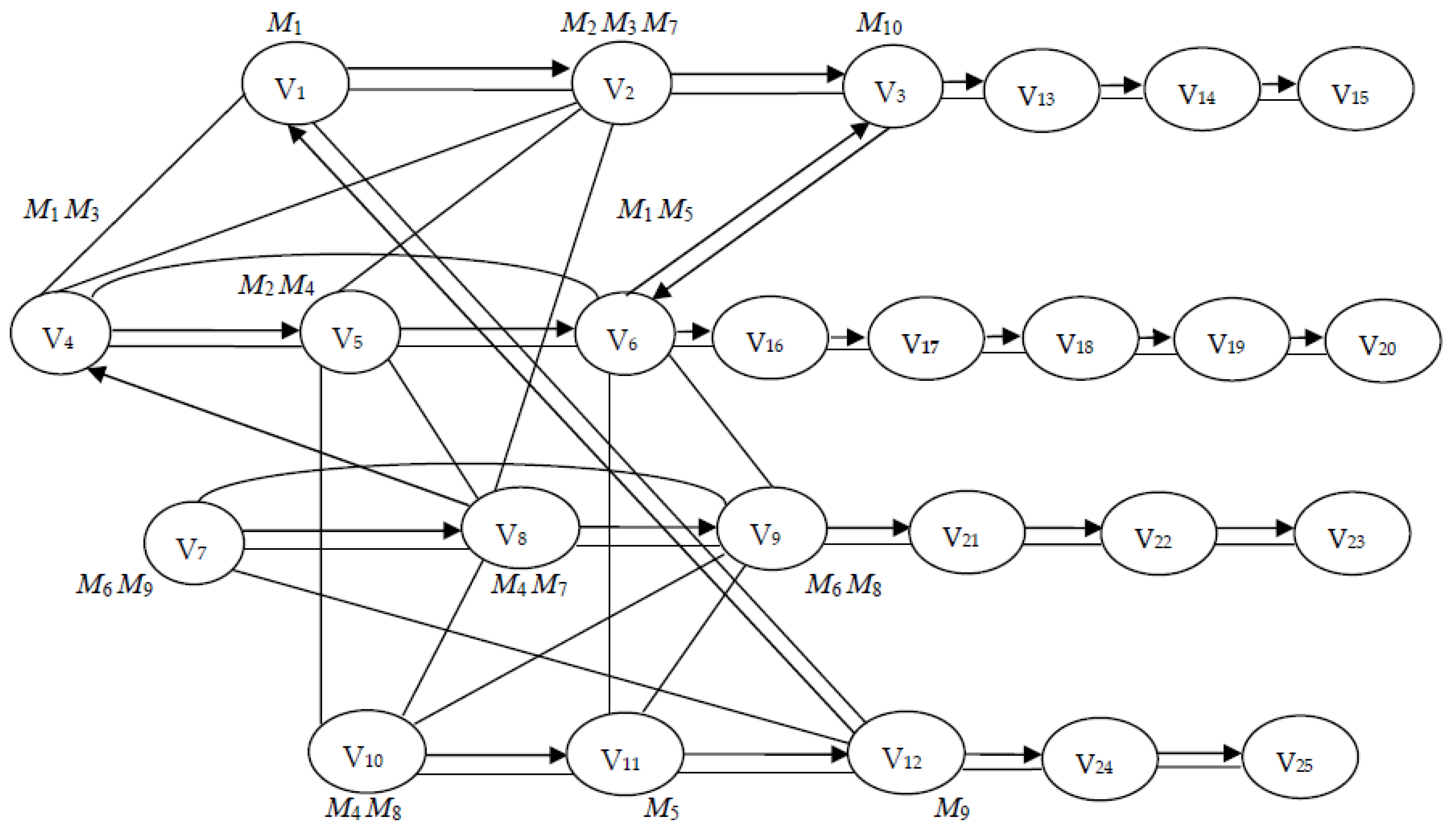
It is easy to see that Algorithm 1 described in the proof of Theorem 6 shows that for any colorable mixed graph , one can construct the general shop scheduling problem on the mixed graph , which is equivalent to finding an optimal coloring of the mixed graph , and all jobs in the set are simple. To illustrate Theorem 6, we consider Example 4 of the general shop scheduling problem on the mixed graph depicted in Figure 3.
Example 4.
Let ten dedicated machines have to process four jobs with release times given as follows: , , , .
The job includes the set = of the linearly ordered operations:. In Figure 3, the job is represented as a union of the path in the digraph and the chain in the graph . The job includes the set = of the linearly ordered operations: . The job is represented as a union of the path in the digraph and the chain in the graph . The job includes the set = of the linearly ordered operations: . The job is represented as a union of the path in the digraph and the chain in the graph . The job includes the set = of the linearly ordered operations: . The job 4 is represented as a union of the path and the chain in the graph .
The machine processes the operations = . The forbiddance to process operations from the set simultaneously is determined by the edge in the graph . The machine processes the operations = . The forbiddance to process operations from the set simultaneously is determined by the edge . The machine processes the operations = . The forbiddance to process a pair of operations from the set simultaneously is determined by the edge [v2,v4]. The machine processes the operations = . The forbiddance to process operations from the set simultaneously is determined by the clique in the graph . The machine processes the operations = . The forbiddance to process a pair of operations from the set simultaneously is determined by the clique . The machine processes the operations = . The forbiddance to process operations from the set simultaneously is determined by the edge . The machine processes the operations = . The forbiddance to process operations from the set simultaneously is determined by the edge . Machine processes the operations = . The forbiddance to process operations from the set simultaneously is determined by the edge . The machine processes the operations V9 = {v7,v12}. The forbiddance to process operations from the set simultaneously is determined by the edge The machine processes one operation = .
The precedence constraints between operations belonging to different jobs are given as follows: ; ; ; . In Figure 3, these precedence constraints are presented by four arcs and one edge in the mixed graph . The release time of the job is presented as a union of the path in the digraph and the chain in the graph . The release time of the job is presented as a union of the path in the digraph and the chain in the graph . The release time of the job is presented as a union of the path in the digraph and the chain in the graph . The release time of the job is presented as a union of the path in the digraph and the chain in the graph . The digraph has one circuit , which has no adjacent vertices in the graph Since the digraph has no circuit containing adjacent vertices in the graph , there exists a feasible schedule for Example 4 of the general shop scheduling problem on the mixed graph (due to Theorem 4).
Due to Theorem 6, an optimal schedule for Example 4 is determined by the following optimal coloring of the mixed graph depicted in Figure 3: , , , , , , , , , , , , , , . The coloring with is optimal since the mixed graph includes the path of the length 11. Thus, the non-strict inequality must hold.
3.2. Finding a Makespan Optimal Schedule with Integer Release Times Reduces to Finding a Schedule with a Smallest Maximal Lateness for Integer Due Dates
We next prove the equivalence of the general shop scheduling problem with integer release times , , and the general shop scheduling problem to minimize the maximal lateness with integer due dates , . To illustrate the proof of Theorem 7, we use Examples 4 of the general shop scheduling problem on the mixed graph depicted in Figure 3.
Theorem 7.
Any solvable general shop scheduling problemon the mixed graphwith integer release timesis equivalent to a general shop scheduling problemwith integer due dates, and vice versa.
Proof.
The general shop scheduling problem under consideration is solvable. Thus, due to Theorem 6, the mixed graph is colorable. Hence, due to Theorem 1, the directed subgraph of the mixed graph has no circuit containing adjacent vertices in the graph . Given the general shop scheduling problem on the mixed graph , we next construct the general shop scheduling problem with integer due dates. In the general shop scheduling problem , the same set of the jobs enter the processing system simultaneously at time . The set of the jobs must be processed on the set of the dedicated machines. We assume that in the general shop scheduling problem , every machine has to process the same subset of the jobs similarly as in the considered general shop scheduling problem .
For every job which must be processed in the general shop scheduling problem , the integer due date is given along with the linear order for processing all operations . The order is opposite to the linearly order determined in the considered general shop scheduling problem for processing the same set of the operations.
Further, if the precedence constraints and are given between operations belonging to different jobs in the considered general shop scheduling problem , then the inverse precedence constraints and are determined in the general shop scheduling problem .
We demonstrate the construction of the general shop scheduling problem for Example 4 of the general shop scheduling problem on the mixed graph depicted in Figure 3. Given Examples 4 of the general shop scheduling problem , we construct the general shop scheduling problem on the mixed graph depicted in Figure 2, provided that due dates for the jobs are determined as follows: , , .
Due to Theorem 6, an optimal schedule for the general shop scheduling problem on the mixed graph is determined by the optimal coloring of the mixed graph . It is easy to convince yourself that the part of the coloring of the mixed graph where determine an optimal schedule for the general shop scheduling problem , where the optimal maximal lateness is calculated as follows: . Thus, the following claim is proved: any solvable general shop scheduling problem on the mixed graph with integer release times is equivalent to a general shop scheduling problem with integer due dates .
For the constructed example of the general shop scheduling problem on the mixed graph depicted in Figure 2, the following optimal maximal lateness is obtained: .
Since the arguments presented above are reversible, one can similarly prove the following opposite claim: any solvable general shop scheduling problem with integer due dates is equivalent to the general shop scheduling problem on the specified mixed graph with integer release times . Thus, Theorem 7 is proved. □
Theorems 6 and 7 directly imply the following corollary.
Corollary 1.
Any solvable general shop scheduling problemmay be represented as finding an optimal coloringof the specified mixed graph.
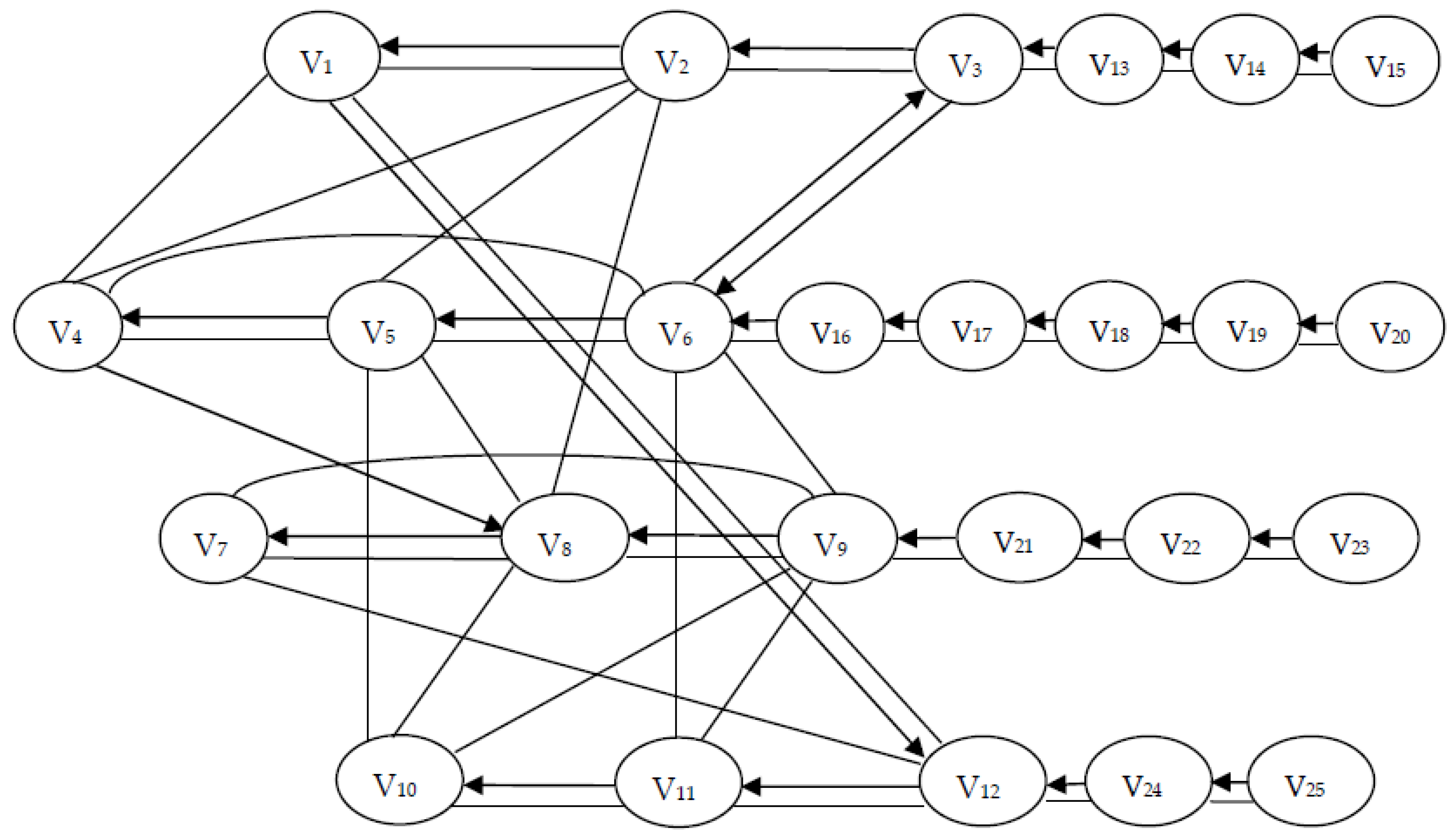
In Figure 4, the mixed graph is presented for the example of the general shop scheduling problem constructed in the proof of Theorem 7. It is easy to convince yourself that an optimal schedule for the constructed general shop scheduling problem is determined as an optimal coloring of the mixed graph depicted in Figure 4.
3.3. Optimal Mixed Graph Colorings and Equivalent Shop-Scheduling Problems
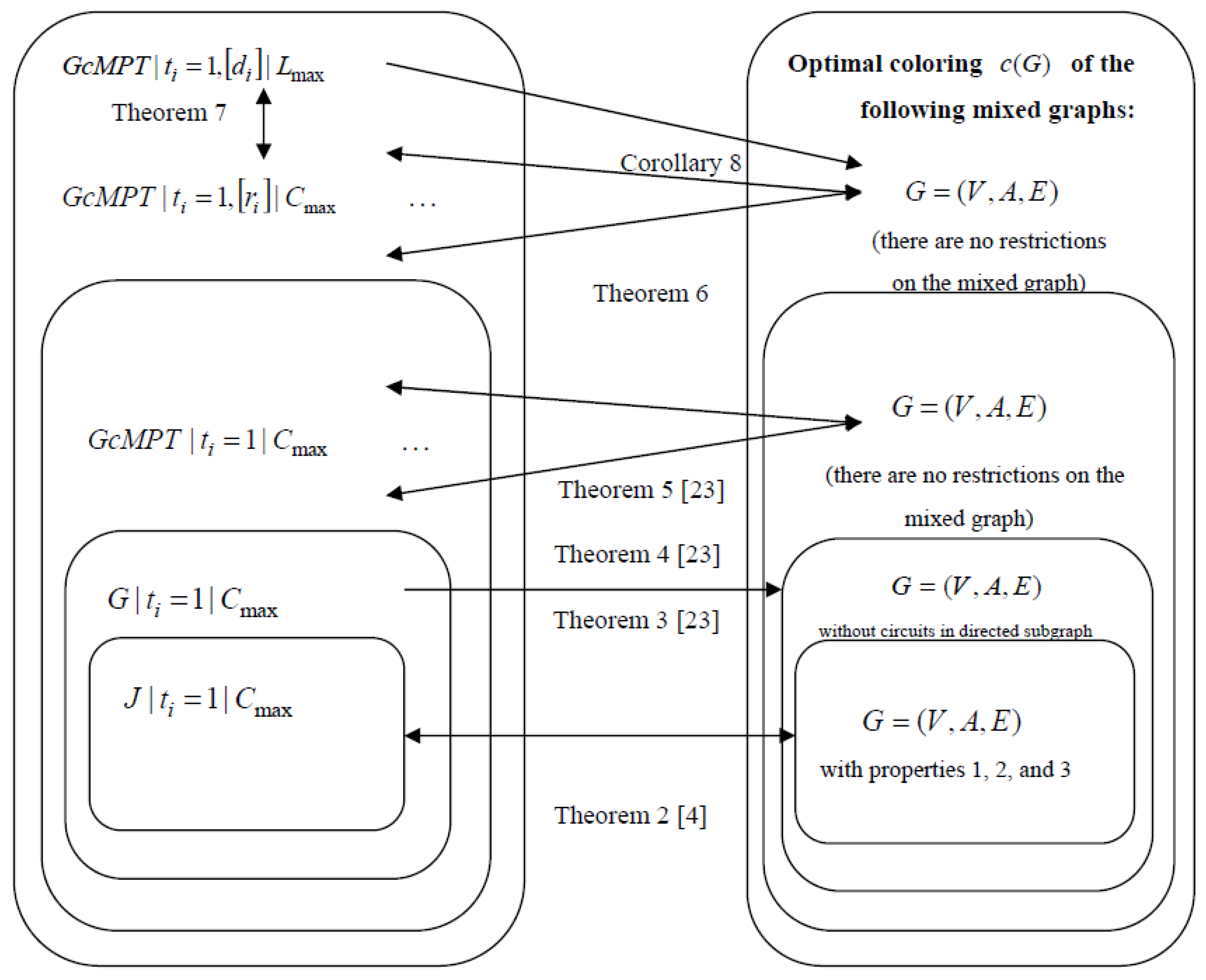
The results surveyed in Section 2 and proved in Section 3.1 and Section 3.2 are summarized in Figure 5, where the relation indicates the equivalence of the scheduling problem presented in the left-hand part of the table in the oval and the problem of optimal coloring of the mixed graph presented in the right-hand part in the corresponding oval.
Further, the arrow indicates that the problem may be represented as the problem , provided that the relation holds. The mandatory properties (restrictions) of the mixed graph , whose colorings are equivalent to the scheduling problem , are described (if any) under the corresponding mixed graph in the oval.
Theorems and Corollary 1 on the equivalence of the problems and are indicated under the correspondent arrows in Figure 5.
In Figure 5, a pair of arrows with common right directions shows that there is a unique problem of optimal coloring of the mixed graph , which is equivalent to the general shop scheduling problem on the mixed graph . On the other hand, there are many general shop scheduling problems on the mixed graph , which are equivalent to the same problem of optimal coloring of the mixed graph .
Further, there are many general shop scheduling problems on the mixed graph , which are equivalent to the same problem of optimal coloring of the mixed graph .
4. Semi-Active Schedules and Minimal Colorings of the Mixed Graphs
Obviously, there exist infinitely many feasible colorings (and infinitely many feasible schedules, respectively) for any colorable mixed graph (for any solvable shop-scheduling problem ).
In order to restrict a set of feasible schedules for a shop-scheduling problem , which have to be tested in order to find an optimal schedule for a fixed regular objective function [16], a finite set of the semi-active schedules are sufficient to test, since there exists an optimal semi-active schedule for each concrete shop-scheduling problem with any fixed regular objective function [27,28].
Definition 2 ([27,28]).
A schedule is called semi-active if no task (operation) can be processed earlier without violating a given constraint or changing the task (operation) processing order in the newly constructed schedule.
Remark that any coloring of the mixed graph uniquely determines a strict order on the colors used for all vertices of the set . Due to this, one can define a minimal coloring of the mixed graph as follows.
Definition 3.
A coloringof the mixed graphis called minimal if no colorcan be decreased without changing the increasing order of colorsof the vertices in the setin the newly constructed coloringof the mixed graph.
Based on the proof of Theorem 6 and using Definitions 2 and 3, it easy to convince yourself that each semi-active schedule existing for the general shop scheduling problem on the mixed graph uniquely determines a minimal coloring of the mixed graph . On the other hand, each minimal coloring of the mixed graph uniquely determines a semi-active schedule existing for the general shop scheduling problem on the mixed graph . Thus, the following theorem is proved.
Theorem 8.
There exists a one-to-one correspondence between all minimal coloringsof the mixed graphand all semi-active schedules existing for the general shop scheduling problemon the mixed graph.
Due to Theorems 6 and 8, in order to find an optimal schedule for the general shop scheduling problem on the mixed graph , it is sufficient to test minimal colorings of the mixed graph . On the other hand, in order to find an optimal coloring of the mixed graph , it is sufficient to test semi-active schedules existing for the general shop scheduling problem on the mixed graph .
5. Discussion
In Section 3.1, we defined a general shop scheduling problem of finding a schedule with the minimum length for processing multiprocessor tasks with unit-time durations and integer release times provided that two types of the precedence constraints may be given on the set of the multiprocessor tasks. Contrary to a classical shop-scheduling problem, several machines are required to process a multiprocessor task in the problem . Furthermore, it is required that specified subsets of the multiprocessor tasks must be processed simultaneously.
We proved Theorem 6 showing that an optimal coloring of any colorable mixed graph is equivalent to the general shop scheduling problem on the mixed graph . Theorem 6 implies that most analytical and algorithmic results proven for optimal colorings of the mixed graph, have analogous results, which are valid for the newly defined scheduling problem , and vice versa. In particular, some results that have been proven in [10,11,27,28,29,30,31,32,33,34] for the scheduling problem and for its special cases may be interpreted as analogous results for optimal colorings of the corresponding mixed graphs . Similarly, some results that have been proven in [3,4,5,8,9,17,18,22,23,24] for optimal mixed graph colorings may be interpreted as analogous results for general shop scheduling problems . In the other words, there are articles [3,4,5,8,9,10,11,17,18,22,23,24,27,28,29,30,31,32,33,34] studied both of these problems without indicating that they are actually the same problems.
Theorem 6 may be considered as a generalization of Theorem 2 proven in [4] and Theorems 3 and 4 proven in [23].
In Section 3.2, we defined a new general shop scheduling problem to minimize the maximal lateness with integer due dates , two types of the precedence constraints, specified subset of tasks, which must be processed simultaneously, and unit-time durations of the multiprocessor tasks. We proved Theorems 7 showing that any solvable general shop scheduling problem on the mixed graph with integer release times is equivalent to a general shop scheduling problem with integer due dates, and vice versa. Corollary 1, Theorem 6, and Theorem 7 imply that any solvable general shop scheduling problem reduces to finding an optimal coloring of the specified mixed graph .
5.1. New Approaches to Shop-Scheduling Problems and Mixed Graph Colorings
The results presented in Section 2, Section 3 and Section 4 may be interpreted as a new scheduling approach to the mixed graph coloring problems and as a new mixed graph coloring approach to the specified scheduling problems. For applying the mixed graph coloring approach, a scheduling problem must have equal durations of all tasks, integer release times for the makespan criterion (and integer due dates for the maximal lateness criterion). Furthermore, preemptions of the given task are forbidden. There is no restriction on mixed graphs for applying the scheduling approach to the mixed graph coloring problems.
It should be noted that many terms used in scheduling theory (such as schedule, job, machine, processor, operation, task, processing time, release times, due dates, maximal lateness, makespan, etc.) may be considered as usual terms used in mixed graph colorings. The terminology used in modern scheduling theory is more complicated since there are many scheduling applications in the different fields of real world. Based on the constructive proofs of Theorems 6 and 7, it is possible to describe many results either using only graph terminology or using only scheduling terminology.
The mixed graph coloring approach may be promising in the mass production, which presupposes scheduling problems with equal processing times of the jobs to minimize either makespan Cmax or maximal lateness Lmax.
5.2. Future Research Directions
A future research direction may be connected with the usage of the mixed graph coloring approach to develop efficient mechanisms for scheduling cloud computations, where there no enough information on the durations of the tasks to be processed on virtual machines. Both considered objective functions (the makespan and maximal lateness) are important for the optimization of the cloud computations.
Another promising research direction is connected with the application of the mixed graph coloring approach to scheduling personal jobs in the time-management framework, where a user needs to have a break (preemption) in her (his) activity after equal time intervals. In other words, one can assume that the scheduling problems arising in the time-management have unit-time durations of the tasks to be processed within a day. In future research, we plan to investigate other classes of shop-scheduling problems, which are equivalent to optimal colorings of the specified mixed graphs.
Author Contributions
Y.N.S. proposed the methodology and defined the new scheduling problems; Y.N.S. and E.I.M. jointly proved theoretical results; E.I.M. designed the algorithm; Y.N.S. and E.I.M. jointly prepared examples and analyzed the obtained data; E.I.M. wrote the review; Y.N.S. wrote the manuscript; Y.N.S. and E.I.M. have read and approved the final manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
The research by the first author was funded by Belarusian Republican Foundation for Fundamental Research BRFFR-NSFC, grant number F22KI-005.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Duguay, C.R.; Landry, S.; Pasin, F. From mass production to flexible/agile production. Int. J. Oper. Prod. Manag. 1997, 17, 1183–1195. [Google Scholar] [CrossRef]
- Wan, L.; Mei, J.; Du, J. Two-agent scheduling of unit processing time jobs to minimize total weighted completion time and total weighted number of tardy jobs. Eur. J. Oper. Res. 2021, 290, 26–35. [Google Scholar] [CrossRef]
- Sotskov, Y.N.; Tanaev, V.S. A chromatic polynomial of a mixed graph. Vestsi Akademii Navuk BSSR Seryya Fizika-Matematychnykh Navuk. 1976, 6, 20–23. (In Russian) [Google Scholar]
- Sotskov, Y.N.; Dolgui, A.; Werner, F. Mixed graph coloring for unit-time job-shop scheduling. Int. J. Math. Algorithms 2001, 2, 289–323. [Google Scholar]
- Sotskov, Y.N.; Tanaev, V.S.; Werner, F. Scheduling problems and mixed graph colorings. Optimization 2002, 51, 597–624. [Google Scholar] [CrossRef]
- Karp, R.M. Reducibility among combinatorial problems. In Complexity of Computer Computations; Miller, R.E., Thatcher, J.W., Eds.; Plenum Press: New York, NY, USA, 1972; pp. 85–103. [Google Scholar]
- Al-Anzi, F.S.; Sotskov, Y.N.; Allahverdi, A.; Andreev, G.V. Using mixed graph coloring to minimize total completion time in job shop scheduling. Appl. Math. Comput. 2006, 182, 1137–1148. [Google Scholar] [CrossRef]
- Kouider, A.; Ait Haddadne, H.; Ourari, S.; Oulamara, A. Mixed graph coloring for unit-time scheduling. Int. J. Prod. Res. 2017, 55, 1720–1729. [Google Scholar] [CrossRef]
- Kouider, A.; Ait Haddadne, H.; Oulamara, A. On minimization of memory usage in branch-and-bound algorithm for the mixed graph coloring: Application to the unit-time job shop scheduling. Comput. Oper. Res. 2019, 4967, 1001–1008. [Google Scholar]
- Lenstra, J.K.; Rinnooy Kan, A.H.G. Computational complexity of discrete optimization problems. Ann. Discret. Math. 1979, 4, 121–140. [Google Scholar]
- Gonzalez, T. Unit execution time shop problems. Math. Oper. Res. 1982, 7, 57–66. [Google Scholar] [CrossRef]
- Sotskov, Y.N. Complexity of optimal scheduling problems with three jobs. Cybernetics 1990, 26, 686–692. [Google Scholar] [CrossRef]
- Sotskov, Y.N. The complexity of shop-scheduling problems with two or three jobs. Eur. J. Oper. Res. 1991, 53, 326–336. [Google Scholar] [CrossRef]
- Sotskov, Y.N.; Shakhlevich, N.V. NP-hardness of shop-scheduling problems with three jobs. Discret. Appl. Math. 1995, 59, 237–266. [Google Scholar] [CrossRef]
- Kravchenko, S.A.; Sotskov, Y.N. Optimal makespan schedule for three jobs on two machines. ZOR Z. Oper. Res. 1996, 43, 233–238. [Google Scholar] [CrossRef]
- Brucker, P.; Kravchenko, S.A.; Sotskov, Y.N. On the complexity of two machine job-shop scheduling with regular objective functions. Oper.-Res.-Spektrum 1997, 19, 5–10. [Google Scholar] [CrossRef]
- Damaschke, P. Parameterized mixed graph coloring. J. Comb. Optim. 2019, 38, 326–374. [Google Scholar] [CrossRef] [Green Version]
- Hansen, P.; Kuplinsky, J.; De Werra, D. Mixed graph colorings. Math. Meth. Oper. Res. 1997, 45, 145–160. [Google Scholar] [CrossRef]
- Kruger, K.; Sotskov, Y.N.; Werner, F. Heuristic for generalized shop scheduling problems based on decomposition. Int. J. Prod. Res. 1998, 36, 3013–3033. [Google Scholar] [CrossRef]
- Sotskov, Y.N. Software for production scheduling based on the mixed [multi]graph approach. Comput. Contr. Eng. J. 1996, 7, 240–246. [Google Scholar] [CrossRef]
- Sotskov, Y.N. Mixed multigraph approach to scheduling jobs on machines of different types. Optimization 1997, 42, 245–280. [Google Scholar] [CrossRef]
- De Werra, D. On a multiconstrained model for chromatic scheduling. Discret. Appl. Math. 1999, 94, 171–180. [Google Scholar] [CrossRef] [Green Version]
- Sotskov, Y.N. Mixed graph coloring as scheduling multi-processor tasks with equal processing times. J. Belarusian State Univ. Math. Inform. 2021, 2, 67–81. [Google Scholar]
- Sotskov, Y.N. Mixed graph colorings: A historical review. Mathematics 2020, 8, 385. [Google Scholar] [CrossRef] [Green Version]
- Harary, F. Graph Theory.; Addison-Wesley: Reading, MA, USA, 1969. [Google Scholar]
- Thulasiraman, K.; Swamy, M.N.S. Graphs: Theory and Algorithms; John Wiley & Sons, Inc.: Toronto, ON, Canada, 1992. [Google Scholar]
- Tanaev, V.S.; Sotskov, Y.N.; Strusevich, V.A. Scheduling Theory: Multi-Stage Systems; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1994. [Google Scholar]
- Brucker, P. Scheduling Algorithms; Springer: Berlin, Germany, 1995. [Google Scholar]
- Graham, R.L.; Lawler, E.L.; Lenstra, J.K.; Rinnooy-Kan, A.H.G. Optimization and approximation in deterministic sequencing and scheduling. Ann. Discret. Appl. Math. 1979, 5, 287–326. [Google Scholar]
- Baptiste, P. A note on scheduling multiprocessor tasks with identical processing times. Comput. Oper. Res. 2003, 30, 2071–2078. [Google Scholar] [CrossRef]
- Zinder, Y.; Dob, V.H.; Oğuz, C. Computational complexity of some scheduling problems with multiprocessor tasks. Discret. Optimization 2005, 2, 391–408. [Google Scholar] [CrossRef] [Green Version]
- Kis, T. Scheduling multiprocessor UET tasks of two sizes. Theor. Comput. Sci. 2009, 410, 4864–4873. [Google Scholar] [CrossRef] [Green Version]
- Giaro, K.; Kubale, M.; Obszarski, P. A graph coloring approach to scheduling of multiprocessor tasks on dedicated machines with availability constraints. Discret. Appl. Math. 2009, 157, 3625–3630. [Google Scholar] [CrossRef] [Green Version]
- Drozdowski, M. Scheduling multiprocessor—an overview. Eur. J. Oper. Res. 1996, 94, 215–230. [Google Scholar] [CrossRef]
- Błazewicz, J.; Olmo, P.D.; Drozdowski, M.; Mazczka, P. Scheduling multiprocessor tasks on parallel processors with limited availability. Eur. J. Oper. Res. 2003, 149, 377–389. [Google Scholar] [CrossRef]
- Chou, F.D. Particle swarm optimization with cocktail decoding method for hybrid flow shop scheduling problems with multiprocessor tasks. Int. J. Prod. Econ. 2013, 141, 137–145. [Google Scholar] [CrossRef]
- Kurdi, M. Ant colony system with a novel Non-Daemon Actions procedure for multiprocessor task scheduling in multistage hybrid flow shop. Swarm Evol. Comput. 2019, 44, 987–1002. [Google Scholar] [CrossRef]
- Brucker, P.; Kramer, A. Shop scheduling problems with multiprocessor tasks on dedicated processors. Ann. Oper. Res. 1995, 57, 13–27. [Google Scholar] [CrossRef]
- Brucker, P.; Kramer, A. Polynomial algorithms for resource-constrained and multiprocessor task scheduling problems. Eur. J. Oper. Res. 1996, 90, 214–226. [Google Scholar] [CrossRef]
- Hoogeveen, J.A.; van de Velde, S.L.; Veltman, B. Complexity of scheduling multiprocessor tasks with prespecified processor allocations. Discret. Appl. Math. 1994, 55, 259–272. [Google Scholar] [CrossRef] [Green Version]
- Hoogeveen, J.A.; Lenstra, J.K.; Veltman, B. Preemptive scheduling in a two-stage multiprocessor flow shop is NP-hard. Eur. J. Oper. Res. 1996, 89, 172–175. [Google Scholar] [CrossRef]
Figure 1.
Mixed graph determining the input date for Example 1 of the job-shop scheduling problem , optimal mixed graph coloring c(G) being equivalent to Example 1.
Figure 1.
Mixed graph determining the input date for Example 1 of the job-shop scheduling problem , optimal mixed graph coloring c(G) being equivalent to Example 1.

Figure 2.
Mixed graph determining Example 3 of the general shop scheduling problem with 4 jobs and 10 machines, optimal mixed graph coloring being equivalent to Example 3.
Figure 2.
Mixed graph determining Example 3 of the general shop scheduling problem with 4 jobs and 10 machines, optimal mixed graph coloring being equivalent to Example 3.

Figure 3.
Mixed graph determining Example 4 of the general shop scheduling problem , optimal mixed graph coloring being equivalent to Example 4.
Figure 3.
Mixed graph determining Example 4 of the general shop scheduling problem , optimal mixed graph coloring being equivalent to Example 4.

Figure 4.
Mixed graph , whose optimal coloring determines an optimal schedule for the problem constructed in the proof of Theorem 7.
Figure 4.
Mixed graph , whose optimal coloring determines an optimal schedule for the problem constructed in the proof of Theorem 7.

Figure 5.
Optimal colorings of the mixed graph and equivalent scheduling problems on the mixed graph , where and [4,23].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The correspondence of terms used in mixed graph coloring c(G) and those used in the general shop scheduling problem on the mixed graph .
Table 1.
The correspondence of terms used in mixed graph coloring c(G) and those used in the general shop scheduling problem on the mixed graph .
| Vertex | Unit-time task (operation) |
| Vertices on the path (chain) in the digraph (in the graph ) | A set = of the linearly ordered tasks of the job |
| A path (chain) of the length in the digraph (in the graph ) | A release time of the job |
| A clique in the graph | Tasks = processed by machine |
| Arc (vi,vj) in the digraph | A precedence constraint determined between operations belonging to different jobs |
| Arc in the digraph and edge in the graph | A precedence constraint determined between tasks (operations) belonging to different jobs |
| A circuit in the digraph , where | Tasks , which must be processed simultaneously |
| A coloring of the mixed graph | A schedule for the problem |
| An optimal coloring of the mixed graph | An optimal schedule for the problem on the mixed graph |
| The chromatic number | The minimal value of makespan |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Sotskov, Y.N.; Mihova, E.I. Scheduling Multiprocessor Tasks with Equal Processing Times as a Mixed Graph Coloring Problem. Algorithms 2021, 14, 246. https://0-doi-org.brum.beds.ac.uk/10.3390/a14080246
AMA Style
Sotskov YN, Mihova EI. Scheduling Multiprocessor Tasks with Equal Processing Times as a Mixed Graph Coloring Problem. Algorithms. 2021; 14(8):246. https://0-doi-org.brum.beds.ac.uk/10.3390/a14080246
Chicago/Turabian StyleSotskov, Yuri N., and Evangelina I. Mihova. 2021. "Scheduling Multiprocessor Tasks with Equal Processing Times as a Mixed Graph Coloring Problem" Algorithms 14, no. 8: 246. https://0-doi-org.brum.beds.ac.uk/10.3390/a14080246
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.