
Numerical Aspects of Particle-in-Cell Simulations for Plasma-Motion Modeling of Electric Thrusters

 ,
,  and
and
Abstract
:1. Introduction
- Fourth order Runge–Kutta integration scheme, instead of the typically used leapfrog integration;
- Cubic bi-spline interpolation [32] of the electric potential, instead of the typically used bi-linear interpolation;
- A new ray-tracing approach to reflect the particles at the domain boundaries; note that a full description of the algorithm used for the treatment of the boundary walls is generally not provided throughout the literature approaches;
- A new neutrals ionization scheme;
- Use of parallel programming on GPU.
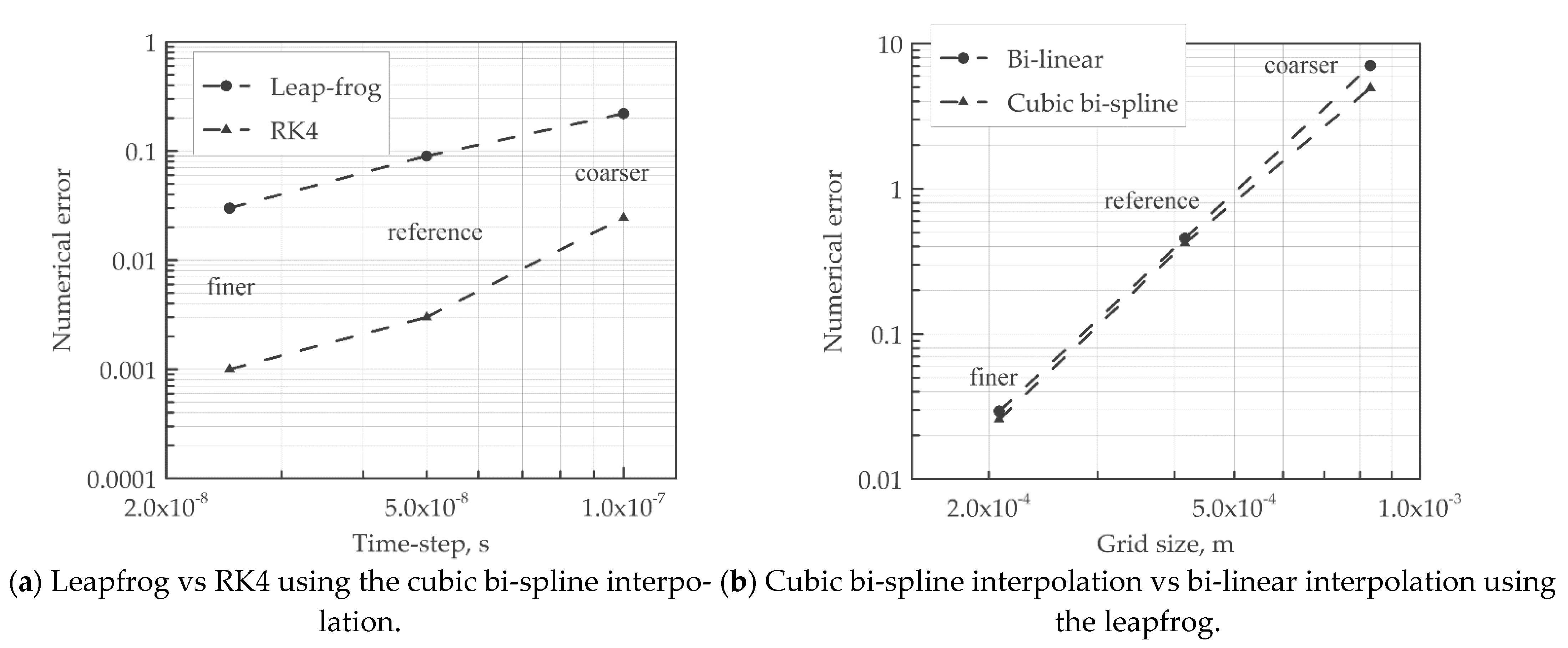
- The Runge–Kutta scheme significantly improves the accuracy over the leapfrog scheme;
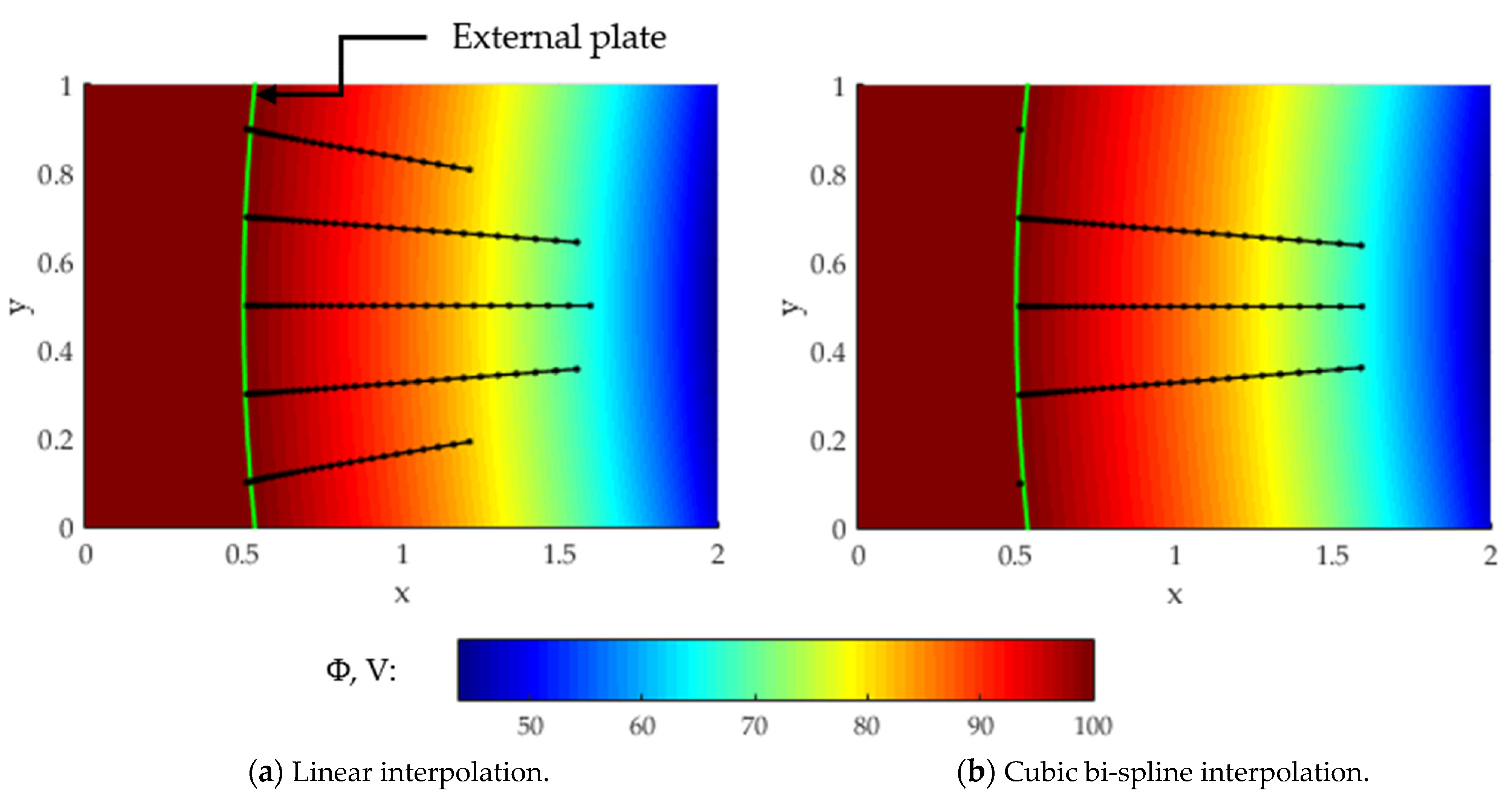
- The cubic bi-spline interpolation improves the accuracy over bi-linear interpolation, ensures the continuity of the first derivative and consequently of the electric field, and enables analytical differentiation once determined the interpolation coefficients;
- The ray-tracing scheme enables us to reflect on the particles quickly;
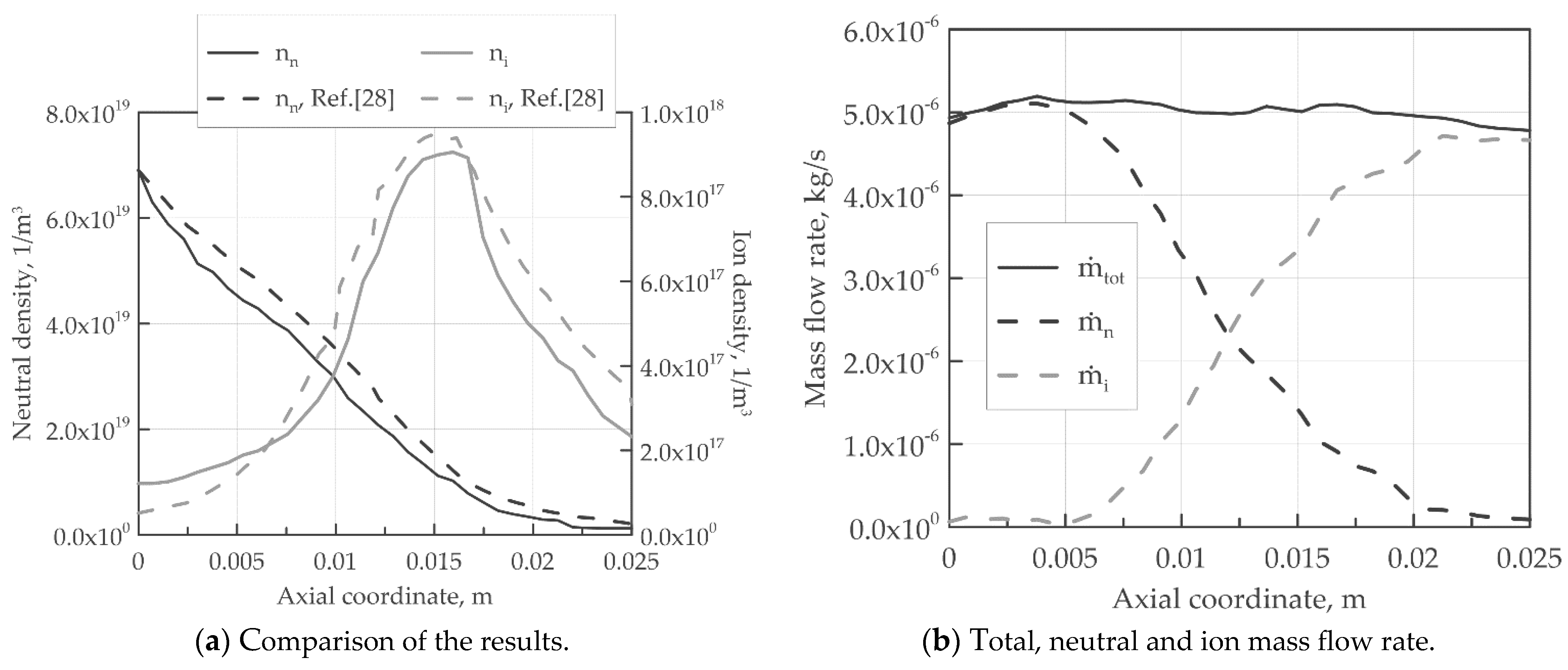
- The neutrals ionization scheme fully conserves the total mass flow rate;
- GPU processing enables us to manage the increased computational burden associated to the accuracy improvements, to reach convenient computation time on off-the-shelf computing platforms.
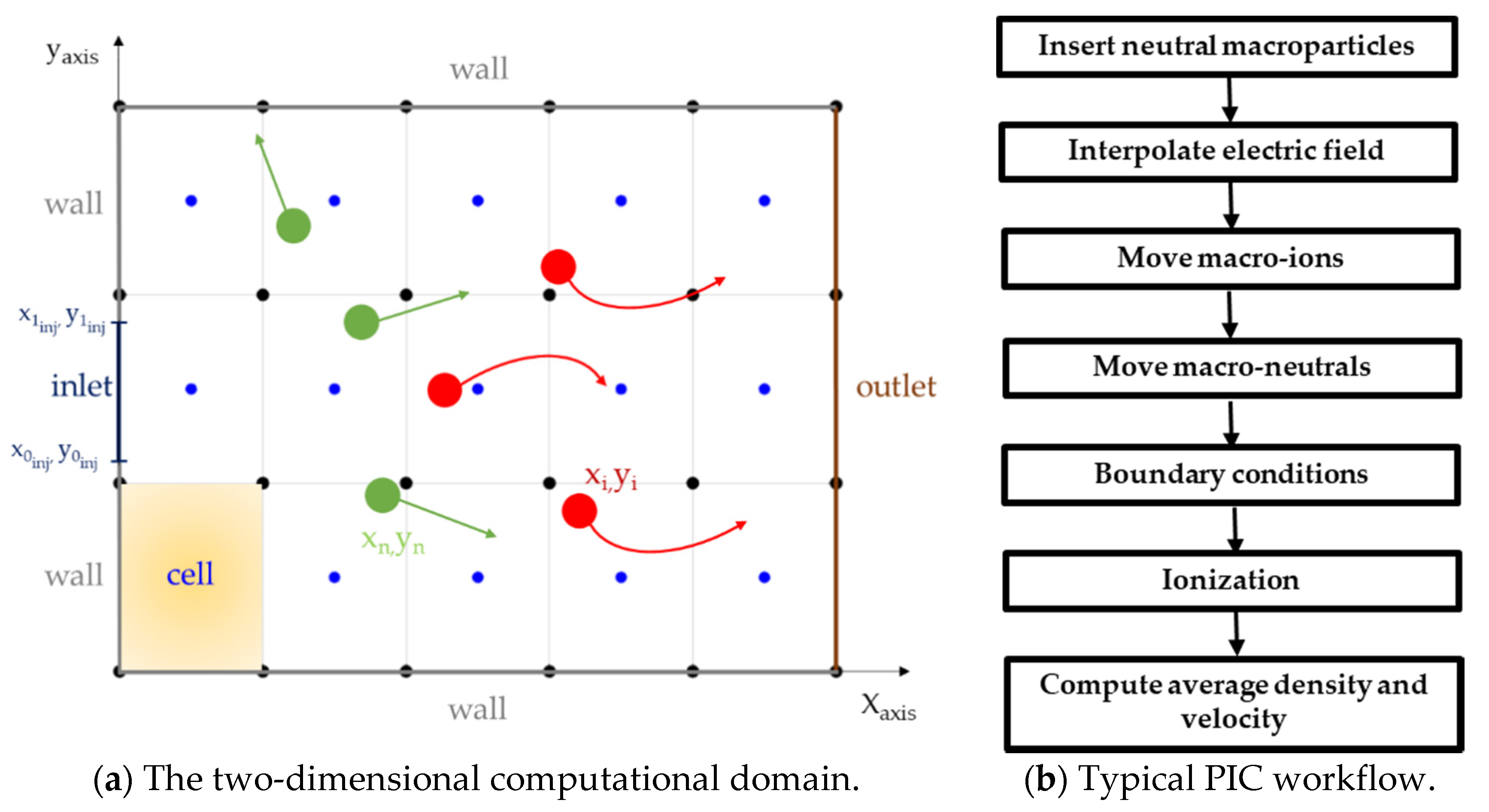
2. PIC Numerical Apparatus
2.1. Neutral and Ion Macro-Particles Motion
- It provides an interpolating polynomial which ensures at least the continuity of the first derivative as requested by the need of performing a spatial derivative of the potential to obtain the electric field; in this way, a continuous electric field is ensured;
- Once the coefficients of the interpolating cubic bi-spline polynomial of the electric potential have been obtained, differentiation can be directly performed to obtain the electric field with a reduction in the numerical effort.
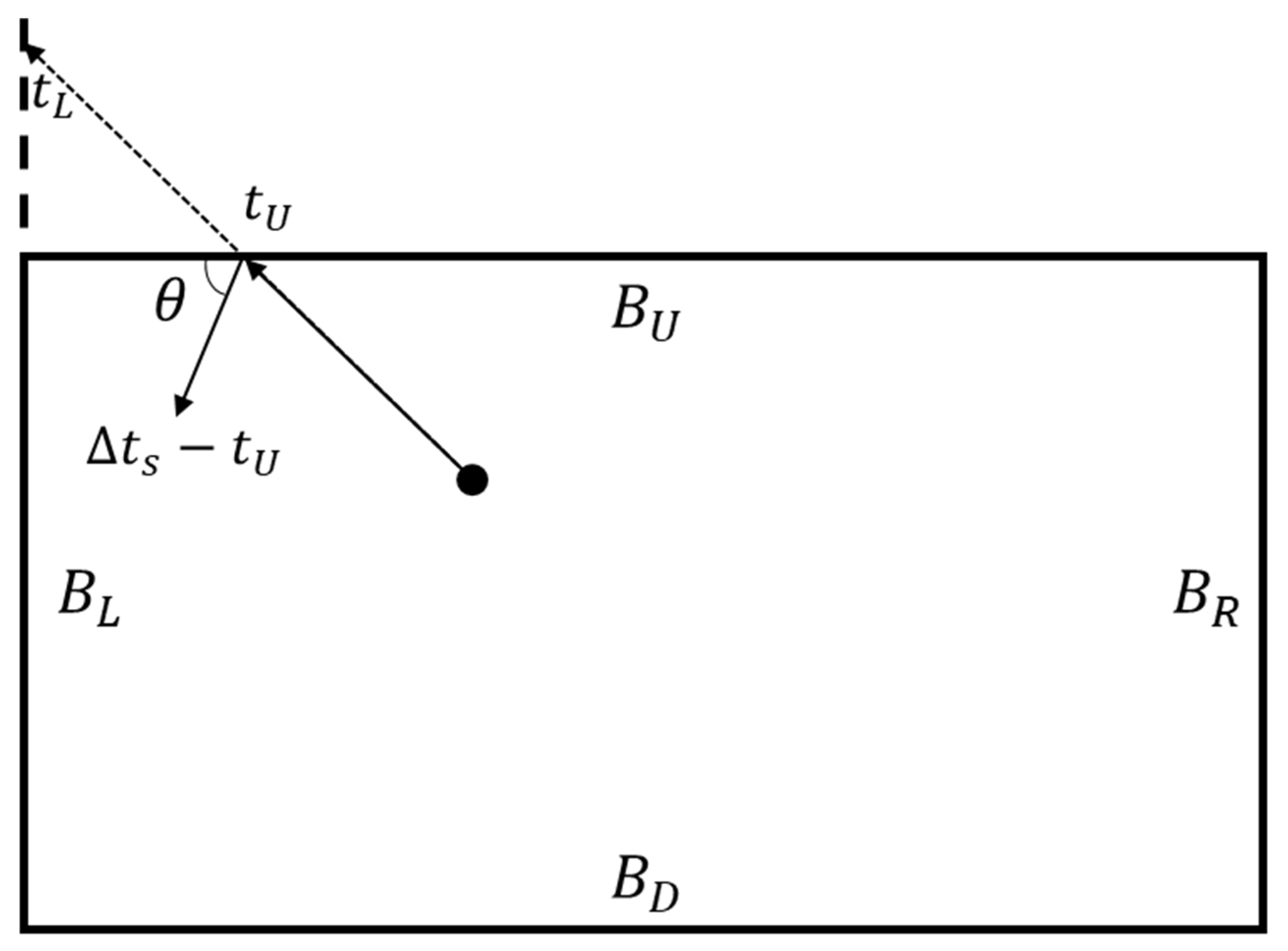
2.2. Boundary Conditions
- The particles substep, giving rise to the boundary-crossing, is rewinded;
- The vector velocity at the rewinded substep is checked to determine the possible impact boundaries; for instance, as shown in Figure 2, negative axial and positive radial velocity components mean that only the upside or left-side boundaries and can have been crossed;
- The time to reach and , and , respectively, is evaluated, and the smallest one defines the crossed boundary;
- The particle is moved back to the computational domain for a physical time corresponding to the remaining part of the time substep after the impact time, which amounts to for the case illustrated in Figure 2; the movement velocity is computed according to the approach detailed below;
- The updated particle position is checked and, if it has crossed a domain boundary again, the ray-tracing algorithm is invoked once more;
- If an outlet boundary condition is enforced at the crossed boundary, the macroparticle is just eliminated.
2.3. Injection
2.4. Ionization
- The estimation of the ionized mass, Mi, in each cell, is obtained by multiplying Equation (7) by Δt. If the estimation exceeds the total neutral mass of a cell, which is physically unfeasible, then the newly ionized cell mass is saturated to the corresponding neutral total mass;
- The newly ionized mass is divided by the number of neutral macroparticles in the corresponding cell to obtain an average mass to be subtracted to each neutral macroparticle. However, since the macroparticles can be characterized by different masses, the mass to be subtracted can be higher than the mass of a certain neutral macroparticle. In this case, to simplify, the remaining mass to be ionized is equally subtracted to the masses of the other neutral macroparticles placed in the same cell;
- New ion macroparticles are generated. Henceforth, we will assume that, at each time step, a constant number of 40 macroparticles are generated. For them, the ion macroparticle mass is computed by dividing the total ionized mass by the number of the generated macroparticles;
- The two velocity components of each ion macroparticle are evaluated by the same algorithm as illustrated in Section 2.2, in which spans now a full round corner and the local electron temperature is used for the estimation of .
2.5. Averages
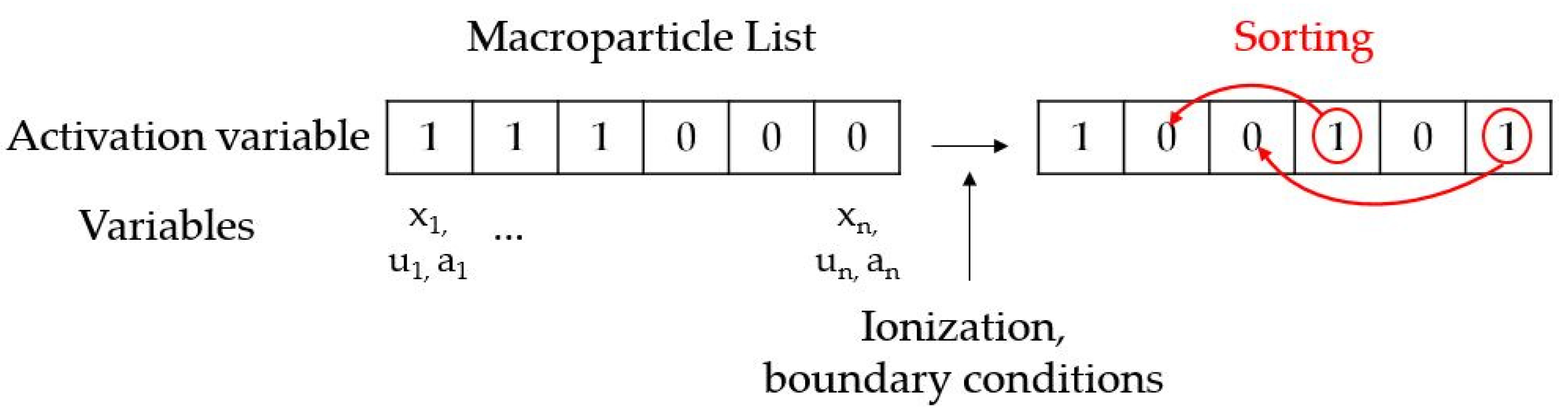
2.6. Computational Strategy
3. Helicon Double-Layer Thruster Modelling
4. Results and Discussion
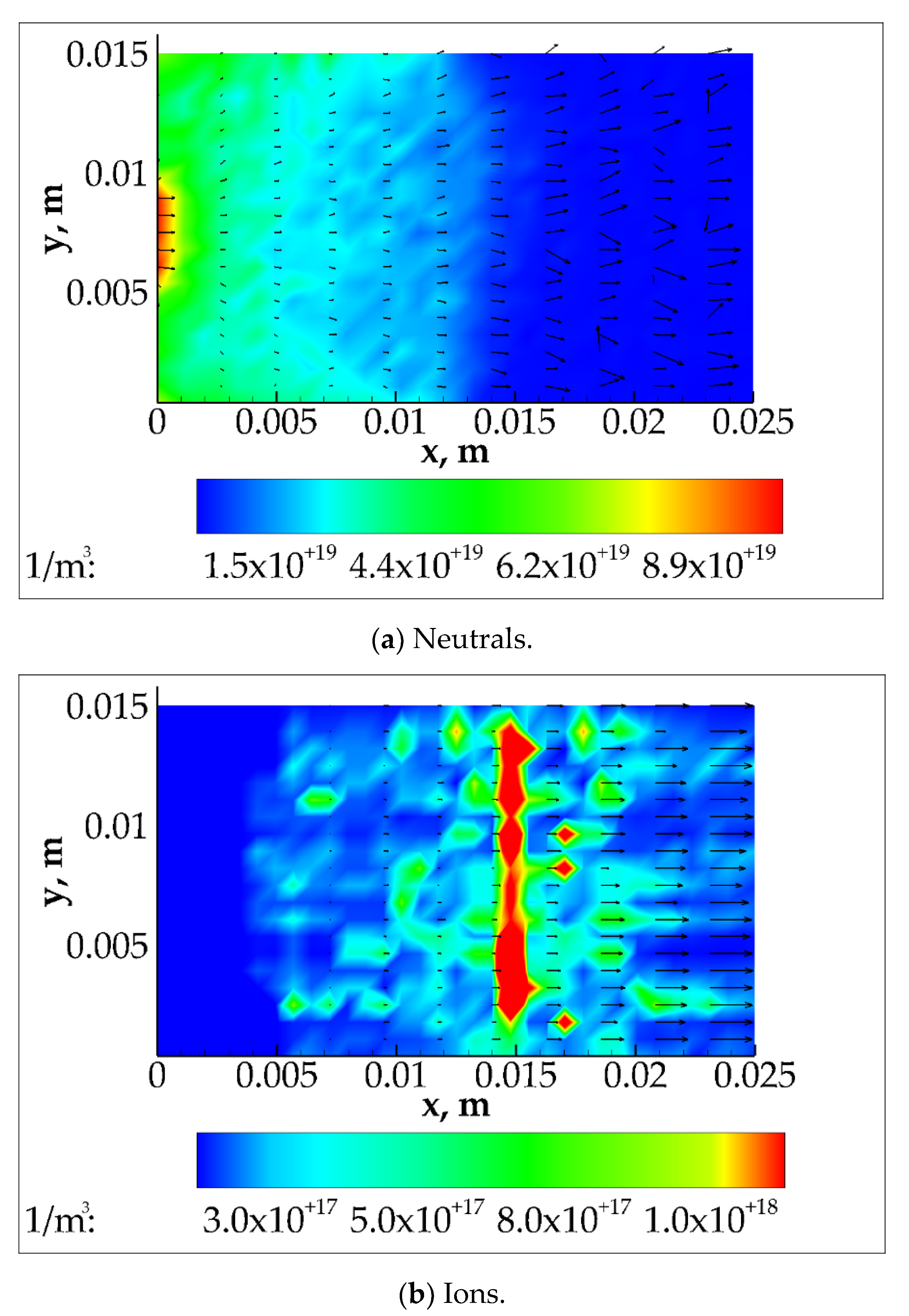
4.1. Application to a Hall-Effect Thruster and Code Validation
4.2. Accuracy Assessment
4.3. Computational Performance Enhancement via Parallelisation
- The first version is completely executed sequentially, and all of the macro-particle operations are handled by using for loops;
- The second version is CPU multi-core accelerated and performs the operations for all the macroparticles in multi-core aware commands;
- The third version is accelerated on GPU.
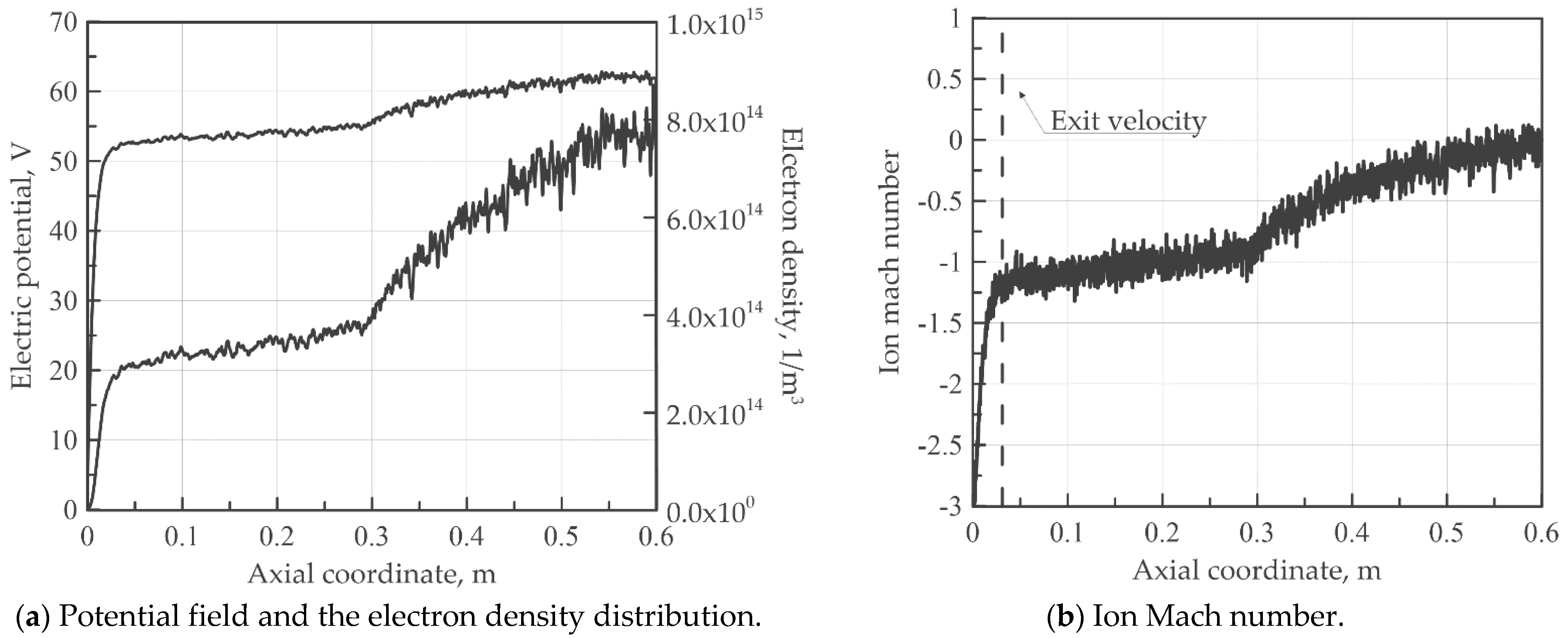
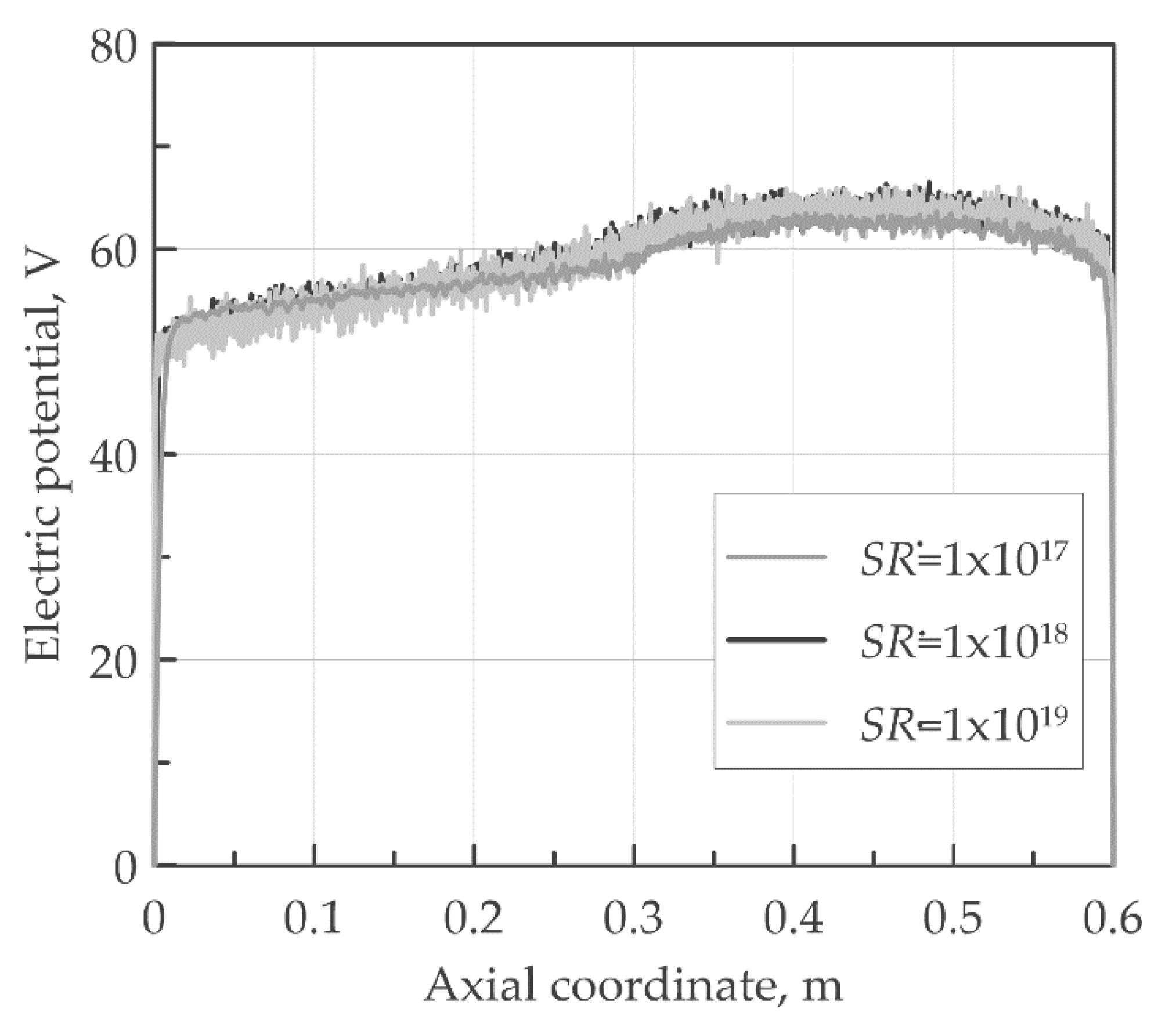
4.4. Magnetic Nozzle Thruster Application
5. Conclusions
- The extension of the geometry to non-rectangular domains; in this case, a Cartesian discretization would not be enough to describe the variations of the electric potentials at the domain boundaries and other kind of meshes, for example, a triangular mesh, should be employed;
- The extension of the geometry to 3D; for rectangular boundaries, the extension would amount to adding additional equations to account for third components of the fields; for non-rectangular boundaries, similarly to the point above, tetrahedral meshes should be employed;
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Area [m2] | |
| Acceleration [m/s2] | |
| Electric field [V/m] | |
| Domain length [m] | |
| Boltzmann constant [m2 kg/ s2 K] | |
| Ionized mass [kg] | |
| Mass [kg] | |
| Mass flow rate [kg/s] | |
| Density [1/m3] | |
| Ionisation rate per volume unit [1/ m3s] | |
| Boltzmann density parameter [1/m3] | |
| Pressure [Pa] | |
| Electric charge [C] | |
| Radius [m] | |
| SR | Source rate [1/s] |
| Temperature [K] | |
| Electron temperature [eV] | |
| Time [s] | |
| Axial velocity [m/s] | |
| Radial velocity [m/s] | |
| Most probable speed [m/s] | |
| Axial coordinate [m] | |
| Radial coordinate [m] | |
| Greek Symbols | |
| Vacuum permittivity [F/m] | |
| Number of collisions per unit time [m3/s−1] | |
| Reflection angle [deg] | |
| Volumetric charge density [C/m3] | |
| Electrostatic potential [V] | |
| Subscripts | |
| Channel | |
| Electron | |
| Ion | |
| Injection | |
| Neutral | |
| Injected particle position | |
| Sub-step | |
| Total | |
| Wall | |
| Acronyms | |
| CPU | Central Processing Unit |
| CUDA | Compute Unified Device Architecture |
| GPU | Graphics Processing Unit |
| PIC | Particle in Cell |
| RK4 | Range-Kutta 4th order |
References
- Levchenko, I.; Xu, S.; Mazouffre, S.; Lev, D.; Pedrini, D.; Goebel, D.; Garrigues, L.; Taccogna, F.; Bazaka, K. Perspectives, frontiers, and new horizons for plasma-based space electric propulsion. Phys. Plasmas 2020, 27, 020601. [Google Scholar] [CrossRef] [Green Version]
- Conde, L.; Domenech-Garret, J.L.; Donoso, J.M.; Damba, J.; Tierno, S.P.; Alamillo-Gamboa, E.; Castillo, M.A. Supersonic plasma beams with controlled speed generated by the alternative low power hybrid ion engine (ALPHIE) for space propulsion. Phys. Plasmas 2017, 24, 123514. [Google Scholar] [CrossRef]
- Ding, Y.; Su, H.; Li, P.; Wei, L.; Li, H.; Peng, W.; Xu, Y.; Sun, H.; Yu, D.; Yongjie, D.; et al. Study of the catastrophic discharge phenomenon in a Hall thruster. Phys. Lett. A 2017, 381, 3482–3486. [Google Scholar] [CrossRef]
- Voyager 1 Fires Up Thrusters after 37 Years. Available online: https://www.nasa.gov/feature/jpl/voyager-1-fires-up-thrusters-after-37 (accessed on 1 December 2017).
- Croes, V.; Tavant, A.; Lucken, R.; Martorelli, R.; LaFleur, T.; Bourdon, A.; Chabert, P. The effect of alternative propellants on the electron drift instability in Hall-effect thrusters: Insight from 2D particle-in-cell simulations. Phys. Plasmas 2018, 25, 063522. [Google Scholar] [CrossRef]
- Musk, E. Making Humans a Multi-Planetary Species. New Space 2017, 5, 46–61. [Google Scholar] [CrossRef]
- Do, S.; Owens, A.; Ho, K.; Schreiner, S.; de Weck, O. An independent assessment of the technical feasibility of the Mars One mission plan—Updated analysis. Acta Astronaut. 2016, 120, 192–228. [Google Scholar] [CrossRef] [Green Version]
- Levchenko, I.; Xu, S.; Mazouffre, S.; Keidar, M.; Bazaka, K. Mars Colonization: Beyond Getting There. Glob. Chall. 2019, 3, 1800062. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boeuf, J.-P. Tutorial: Physics and modeling of Hall thrusters. J. Appl. Phys. 2017, 121, 011101. [Google Scholar] [CrossRef]
- Tummala, A.R.; Dutta, A. An Overview of Cube-Satellite Propulsion Technologies and Trends. Aerospace 2017, 4, 58. [Google Scholar] [CrossRef] [Green Version]
- Levchenko, I.; Keidar, M.; Cantrell, J.; Wu, Y.-L.; Kuninaka, H.; Bazaka, K.; Xu, S. Explore space using swarms of tiny satellites. Nat. Cell Biol. 2018, 562, 185–187. [Google Scholar] [CrossRef] [Green Version]
- Mazouffre, S. Electric propulsion for satellites and spacecraft: Established technologies and novel approaches. Plasma Sources Sci. Technol. 2016, 25, 033002. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Auger, G.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Brandt, N.; Bursi, A.; Caleno, M.; et al. The LISA Pathfinder Mission. J. Phys. Conf. Ser. 2015, 610, 012005. [Google Scholar] [CrossRef] [Green Version]
- Levchenko, I.; Xu, S.; Wu, Y.-L.; Bazaka, K. Hopes and concerns for astronomy of satellite constellations. Nat. Astron. 2020, 4, 1012–1014. [Google Scholar] [CrossRef]
- Taccogna, F.; Garrigues, L. Latest progress in Hall thrusters plasma modelling. Rev. Mod. Plasma Phys. 2019, 3, 12. [Google Scholar] [CrossRef]
- Kahnfeld, D.; Duras, J.; Matthias, P.; Kemnitz, S.; Arlinghaus, P.; Bandelow, G.; Matyash, K.; Koch, N.; Schneider, R. Numerical modeling of high efficiency multistage plasma thrusters for space applications. Rev. Mod. Plasma Phys. 2019, 3, 11. [Google Scholar] [CrossRef]
- Hara, K. An overview of discharge plasma modeling for Hall effect thrusters. Plasma Sources Sci. Technol. 2019, 28, 044001. [Google Scholar] [CrossRef]
- Misra, K. Mathematical Modeling of Liquid-fed Pulsed Plasma Thruster. Aerospace 2018, 5, 13. [Google Scholar] [CrossRef] [Green Version]
- Joncquieres, V.; Pechereau, F.; Alvarez Laguna, A.; Bourdon, A.; Vermorel, O.; Cuenot, B. A 10-moment fluid numerical solver of plasma with sheaths in a Hall Effect Thruster. In Proceedings of the AIAA Propulsion and Energy Forum, Cincinnato, OH, USA, 9–11 July 2018. [Google Scholar] [CrossRef] [Green Version]
- Andreussi, T.; Giannetti, V.; Leporini, A.; Saravia, M.M.; Andrenucci, M. Influence of the magnetic field configuration on the plasma flow in Hall thrusters. Plasma Phys. Control. Fusion 2017, 60, 014015. [Google Scholar] [CrossRef] [Green Version]
- Boeuf, J.P.; Garrigues, L. Low frequency oscillations in a stationary plasma thruster. J. Appl. Phys. 1998, 84, 3541–3554. [Google Scholar] [CrossRef]
- Hey, F.; Brandt, T.; Kornfeld, G.; Braxmaier, C.; Tajmar, M.; Johann, U. Downscaling a hempt to micro-newton thrust levels: Current status and latest result. In Proceedings of the Joint Conference of 30th International Symposium on Space Technology and Science, 34th International Electric Propulsion Conference and 6th Nano-satellite Symposium, Hyogo-Kobe, Japan, 4–10 July 2015. [Google Scholar]
- Kawashima, R.; Hara, K.; Komurasaki, K. Numerical analysis of azimuthal rotating spokes in a crossed-field discharge plasma. Plasma Sources Sci. Technol. 2018, 27, 035010. [Google Scholar] [CrossRef] [Green Version]
- Lam, C.M.; Fernandez, E.; Cappelli, M.A. A 2-D hybrid Hall thruster simulation that resolves E × B electron drift direction. IEEE Trans. Plasma Sci. 2014, 43, 86–94. [Google Scholar] [CrossRef]
- Hofer, R.; Katz, I.; Mikellides, I.G.; Gamero-Castaño, M. Heavy Particle Velocity and Electron Mobility Modeling in Hybrid-PIC Hall Thruster Simulations. In Proceedings of the 42rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Sacramento, CA, USA, 9–12 July 2006. [Google Scholar] [CrossRef] [Green Version]
- Parra, F.I.; Ahedo, E.; Fife, J.M.; Martínez-Sánchez, M. A two-dimensional hybrid model of the Hall thruster discharge. J. Appl. Phys. 2006, 100, 023304. [Google Scholar] [CrossRef]
- Polzin, K.; Martin, A.; Little, J.; Promislow, C.; Jorns, B.; Woods, J. State-of-the-Art and Advancement Paths for Inductive Pulsed Plasma Thrusters. Aerospace 2020, 7, 105. [Google Scholar] [CrossRef]
- Carlsson, J.; Manente, M.; Pavarin, D. Implicitly charge-conserving solver for Boltzmann electrons. Phys. Plasmas 2009, 16, 062310. [Google Scholar] [CrossRef]
- Manente, M.; Musso, I.; Carlsson, J.; Pavarin, D. Numerical Simulation of the Helicon Double Layer Thruster Concept. In Proceedings of the 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhhibit 8, Cincinnati, OH, USA, 8–11 July 2007. [Google Scholar] [CrossRef]
- Barral, S.; Ahedo, E. Low-frequency model of breathing oscillations in Hall discharges. Phys. Rev. E 2009, 79, 046401. [Google Scholar] [CrossRef] [Green Version]
- Romadanov, I.; Smolyakov, A.; Raitses, Y.; Kaganovich, I.; Tian, T.; Ryzhkov, S. Structure of nonlocal gradient-drift instabilities in Hall E × B discharges. Phys. Plasmas 2016, 23, 122111. [Google Scholar] [CrossRef] [Green Version]
- Kirk, D.B.; Hwu, W.-M.W. Programming Massively Parallel Processors: A Hands-On Approach, 3rd ed.; Morgan-Kaufmann: Cambridge, MA, USA, 2017. [Google Scholar] [CrossRef]
- Capozzoli, A.; Curcio, C.; Kilic, O.; Liseno, A. The Success of GPU Computing in Applied Electromagnetics. Appl. Comput. Electromagn. Soc. J. 2018, 33, 148–151. [Google Scholar]
- Dubey, S.P.; Kumar, M.S.; Balaji, S.; Dubey, S.P.; Dubey, M.S.; Balaji, S. GPU Computing for Compute-Intensive Scientific Calculation. In Soft Computing for Problem Solving; Springer: Singapore, 2018; Volume 2, pp. 131–140. [Google Scholar] [CrossRef]
- Diener, J.E.; Elsherbeni, A.Z. FDTD Acceleration Using MATLAB Parallel Computing Toolbox and GPU. Appl. Comput. Electromagn. Soc. J. 2017, 32, 283–288. [Google Scholar]
- Fife, J.M. Hybrid-PIC Modeling and Electrostatic Probe Survey of Hall Thrusters. PhD Thesis, Massachusetts Institute of Technology, Boston, MS, USA, 1999. [Google Scholar]
- Hofer, R.R.; Mikellides, I.G.; Katz, I.; Goebel, D.M. Wall Sheath and Electron Mobility Modeling in Hybrid-PIC Hall Thruster Simulations. In Proceedings of the 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhhibit 8, Cincinnati, OH, USA, 8–11 July 2007. [Google Scholar] [CrossRef] [Green Version]
- Bird, G.A. Molecular Gas Dynamics and the Direct Simulation of Gas Flows, 1st ed.; Oxford Science Publications: New York, NY, USA, 1994. [Google Scholar]
- Goebel, M.D.; Katz, I. Fundamentals of Electric Propulsion: Ion and Hall Thruster, 1st ed.; Jet Propulsion Laboratory: Pasadena, CA, USA, 2008. [Google Scholar]
- Charles, C.; Boswell, R. Current-free double-layer formation in a high-density helicon discharge. Appl. Phys. Lett. 2003, 82, 1356–1358. [Google Scholar] [CrossRef] [Green Version]
- Charles, C. High source potential upstream of a current-free electric double layer. Phys. Plasmas 2005, 12, 44508. [Google Scholar] [CrossRef] [Green Version]
- Krishan, V. Two-Fluid Description of Plasmas; Springer: Dordrecht, The Nerthelands, 1999. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.F. Physical mechanism of current-free double layers. Phys. Plasmas 2006, 13, 034502. [Google Scholar] [CrossRef] [Green Version]
- Chiko, S.M. To the generalization of the Newton-Kantorovich theorem. Visnyk of VN Karazin Kharkiv National University. Ser. Math. Appl. Math. Mech. 2017, 85, 62–68. [Google Scholar]
- Penenko, A.V. A Newton–Kantorovich Method in Inverse Source Problems for Production-Destruction Models with Time Series-Type Measurement Data. Numer. Anal. Appl. 2019, 12, 51–69. [Google Scholar] [CrossRef]
- Keidar, M.; Boyd, I.D.; Beilis, I.I. Plasma flow and plasma–wall transition in Hall thruster channel. Phys. Plasmas 2001, 8, 5315–5322. [Google Scholar] [CrossRef] [Green Version]
- Zlatev, Z.; Dimov, I.; Faragó, I.; Havasi, Á. Richardson Extrapolation; De Gruyter: Berlin, Germany, 2018. [Google Scholar]
- Serway, R.A.; Jewett, J.W., Jr. Physics for Science and Engineers with Modern Physics; Cengage: Boston, MA, USA, 2017. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Δx | Δt | |
|---|---|---|
| Time integration | 2.5 × 10−8 s | |
| 4.16 × 10−4 m | 5 × 10−8 s | |
| 1 × 10−7 s | ||
| Space interpolation | 8.3 × 10−4 m | |
| 4.16 × 10−4 m | 5 × 10−8 s | |
| 2.08 × 10−4 m |
| CPU Parallel, Min | GPU Parallel, Min | Computational Gain, % | |
|---|---|---|---|
| Execution time | 101.2 | 55.75 | 44.91 |
| RK4 | 43.65 | 23.18 | 46.89 |
| Cubic bi-spline interpolation | 40.22 | 19.80 | 50.77 |
| Neutrals motion | 7.31 | 3.45 | 52.80 |
| Gas | Molecolar Weight, g/mol | Ionization Rate, Part/s | Potential Drop, V | Specific Impulse, s | Thrust, mN |
|---|---|---|---|---|---|
| Argon | 39.95 | 1 × 1018 | 12.5 | 698 | 0.45 |
| Iodine | 126.90 | 3 × 1017 | 12.5 | 352 | 0.22 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gallo, G.; Isoldi, A.; Del Gatto, D.; Savino, R.; Capozzoli, A.; Curcio, C.; Liseno, A. Numerical Aspects of Particle-in-Cell Simulations for Plasma-Motion Modeling of Electric Thrusters. Aerospace 2021, 8, 138. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace8050138
Gallo G, Isoldi A, Del Gatto D, Savino R, Capozzoli A, Curcio C, Liseno A. Numerical Aspects of Particle-in-Cell Simulations for Plasma-Motion Modeling of Electric Thrusters. Aerospace. 2021; 8(5):138. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace8050138
Chicago/Turabian StyleGallo, Giuseppe, Adriano Isoldi, Dario Del Gatto, Raffaele Savino, Amedeo Capozzoli, Claudio Curcio, and Angelo Liseno. 2021. "Numerical Aspects of Particle-in-Cell Simulations for Plasma-Motion Modeling of Electric Thrusters" Aerospace 8, no. 5: 138. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace8050138