
Current Knowledge and Future Directions for Improving Subsoiling Quality and Reducing Energy Consumption in Conservation Fields

 ,
,
Abstract
:1. Introduction
2. Subsoiling Shovel Design

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Model | Country | Working Width (cm) | Working Depth (cm) | Matched Power (KW) | Number | Feature |
|---|---|---|---|---|---|---|---|
| chisel | 1S-225C [58] | Germany | 200 | 50–65 | 55–129 | 3 | Adjustable of chisels for any tractor track width |
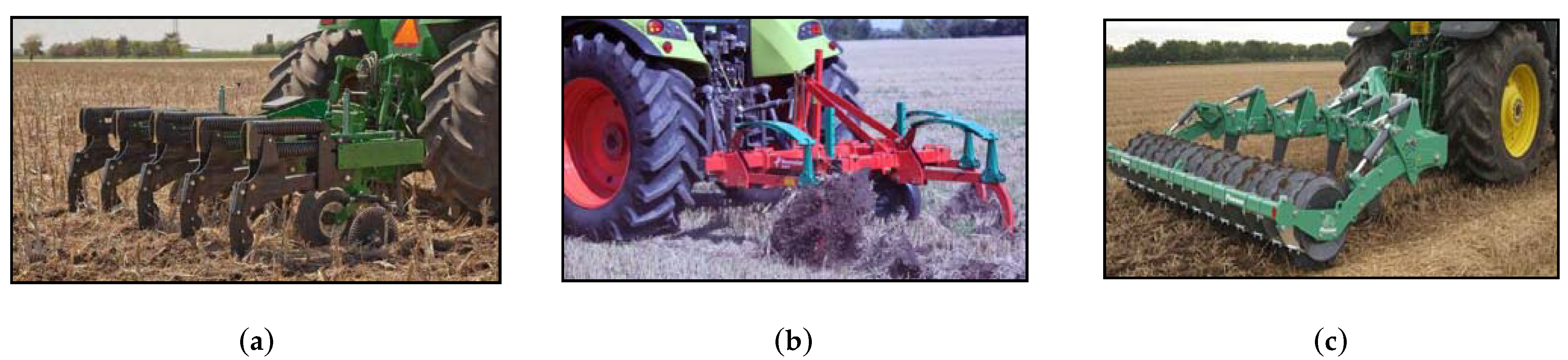
| chisel | 1S-150A (Figure 1a) [59] | China | 150 | 25–30 | 36.8–51.5 | 3 | Low tillage resistance |
| winged | PINOCCHIO200 [60] | Italy | 130–300 | 45 | 50–160 | 3–7 | Available in different widths and shovel numbers |
| winged | 1S-200 (Figure 1b) [61] | China | 200 | 300–400 | 70 | 5 | Good flow of soil under the shovel |
| V shaped | 1SQ-340 (Figure 1c) [62] | China | 155 | 40–50 | 73.6–88.3 | 3 | Forming mole drains at the bottom with smaller resistance |
| side bended side bended | DALBO Ratoon [63] 1S-250 (Figure 1d) [64] | Denmark China | 120–300 250 | 55 25–50 | 30–120 89–106.6 | 2–8 6 | Low power requirement Special cambered surface |
3. Anti-Drag
3.1. Vibration Anti-Drag
3.2. Bionic Anti-Drag
4. Tillage Depth Detection
4.1. Tillage Depth Detection Based on Ultrasonic Sensor
4.2. Tillage Depth Detection Based on Inclination Sensor
5. Tillage Depth Control
5.1. Method of Unified Adjustment of Each Row
5.2. Method of Independent Adjustment of Single Row
6. Soil Mechanical Interaction
7. Summaries and Recommendations
- (1)
- It is very important to improve simulation accuracy by optimizing the soil model in computer simulation. The discrete element model of a root-soil composite model with straw should be established, and the key parameters of soil models need to be calibrated by simulation and laboratory tests. Furthermore, the accuracy and reliability of soil models should be verified by subsoiling simulation and field experiments.
- (2)
- Comprehensive methods combining computer simulation, field experiments, and theoretical analysis need be adopted to strengthen research on subsoiling mechanism and comprehensive effect. Thus, the interaction mechanism between root-soil composite models, subsoiling shovels, and straw, as well as the interactive relationship between energy consumption and yield, increase the benefits from subsoiling and can be clarified from macroscopic and microscopic perspectives.
- (3)
- New tillage depth monitoring and control systems should be developed via mechanism innovation, algorithm optimization, and software development, which has the advantages of accurate detection, fast adjustment, convenient use, and suitability for different soil conditions. Moreover, by the combination with GPS positioning technology and data sharing technology, the tillage depth will be correlated to some information, such as nutrient, moisture, and yield, to provide guidance for the future management of farmland.
- (4)
- Improving the wear-resisting properties of subsoiling shovels is a necessary method to save energy. According to Zhao [119], more than 80% of subsoiling shovels’ failure is caused by wear, which is the main cause of low efficiency, poor quality, and high operating costs. Therefore, some wear-resistance improvements of subsoiling shovels should also be taken into account, such as applying advanced processing technologies, adopting wear resistant materials, and designing shovels with wear-resistant geometry of the biological surface.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zulfiqar, U.; Hussain, S.; Ishfaq, M.; Ali, N.; Ahmad, M.; Ihsan, F.; Sheteiwy, M.S.; Rauf, A.; Hano, C.; EI-Esawi, M.A. Manganese Supply Improves Bread Wheat Productivity, Economic Returns and Grain Biofortification under Conventional and No Tillage Systems. Agriculture 2021, 11, 142. [Google Scholar] [CrossRef]
- Wolkowski, R.; Lowery, B. Soil compaction: Causes, concerns and cures. Coop. Ext. Publ. 2008, 5, 1–8. [Google Scholar]
- Poehlitz, J.; Ruecknagel, J.; Schlueter, S.; Vogel, H.J.; Christen, O. Computed tomography as an extension of classical methods in the analysis of soil compaction, exemplified on samples from two tillage treatments and at two moisture tensions. Geoderma 2019, 346, 52–62. [Google Scholar] [CrossRef]
- Ordonez-Morales, K.D.; Cadena-Zapata, M.; Zermeno-Gonzalez, A.; Campos-Magana, S. Effect of Tillage Systems on Physical Properties of a Clay Loam Soil under Oats. Agriculture 2019, 9, 62. [Google Scholar] [CrossRef] [Green Version]
- European Commission. The State of Soil in Europe-A Contribution of the JRC to the European Environment Agency’s Environment State and Outlook Report-SOER 2010; Publications Office of the European Union: Luxembourg, 2012. [Google Scholar]
- Artemyeva, Z.S.; Kogut, B.M. The Effect of Tillage on Organic Carbon Stabilization in Microaggregates in Different Climatic Zones of European Russia. Agriculture 2016, 6, 63. [Google Scholar] [CrossRef] [Green Version]
- Hargreaves, P.R.; Baker, K.L.; Graceson, A.; Bonnett, S.; Ball, B.C.; Cloy, J.M. Soil compaction effects on grassland silage yields and soil structure under different levels of compaction over three years. Eur. J. Agron. 2019, 109, 1–9. [Google Scholar] [CrossRef]
- Nebo, G.L.; Manyevere, A.; Araya, T.; Tol, J.V. Short-Term Impact of Conservation Agriculture on Soil Strength and Saturated Hydraulic Conductivity in the South African Semiarid Areas. Agriculture 2020, 10, 414. [Google Scholar] [CrossRef]
- Moradi, E.; Rodrigo-Comino, J.; Terol, E.; Mora-Navarro, G.; Silva, A.M.D.; Daliakopoulos, I.N.; Khosravi, H.; Fernandez, M.P.; Cerda, A. Quantifying Soil Compaction in Persimmon Orchards Using ISUM (Improved Stock Unearthing Method) and Core Sampling Methods. Agriculture 2020, 10, 266. [Google Scholar] [CrossRef]
- Somerville, P.D.; May, P.B.; Livesley, S.J. Effects of deep tillage and municipal green waste compost amendments on soil properties and tree growth in compacted urban soils. J. Environ. Manag. 2018, 227, 365–374. [Google Scholar] [CrossRef]
- Kristoffersen, A.O.; Riley, H. Effects of soil compaction and moisture regime on the root and shoot growth and phosphorus uptake of barley plants growing on soils with varying phosphorus status. Nutr. Cycl. Agorecosyst. 2005, 72, 135–146. [Google Scholar] [CrossRef]
- Wang, M.J.; He, D.; Shen, F.; Huang, J.L.; Zhang, R.T.; Liu, W.B.; Zhu, M.J.; Zhou, L.; Wang, L.H.; Zhou, Q. Effects of soil compaction on plant growth, nutrient absorption, and root respiration in soybean seedlings. Environ. Sci. Pollut. Res. 2019, 26, 22835–22845. [Google Scholar] [CrossRef] [PubMed]
- Haruna, S.I.; Nkongolo, N.V. Influence of Cover Crop, Tillage, and Crop Rotation Management on Soil Nutrients. Agriculture 2020, 10, 225. [Google Scholar] [CrossRef]
- Kwiatkowski, C.A.; Harasim, E.; Feledyn-Szewczyk, B.; Antonkiewicz, J. Enzymatic Activity of Loess Soil in Organic and Conventional Farming Systems. Agriculture 2020, 10, 135. [Google Scholar] [CrossRef] [Green Version]
- Wozniak, A. Chemical Properties and Enzyme Activity of Soil as Affected by Tillage System and Previous Crop. Agriculture 2019, 9, 262. [Google Scholar] [CrossRef] [Green Version]
- Singh, K.; Choudhary, O.P.; Singh, H.P.; Singh, A.; Mishra, S.K. Sub-soiling improves productivity and economic returns of cotton-wheat cropping system. Soil Tillage Res. 2019, 189, 131–139. [Google Scholar] [CrossRef]
- Wang, S.B.; Guo, L.L.; Zhou, P.C.; Wang, X.J.; Shen, Y.; Han, H.F.; Ning, T.Y.; Han, K. Effect of subsoiling depth on soil physical properties and summer maize (Zea mays L.) yield. Plant Soil Environ. 2019, 65, 131–137. [Google Scholar] [CrossRef] [Green Version]
- Schneider, F.; Don, A.; Hennings, I.; Schmittmann, O.; Seidel, S.J. The effect of deep tillage on crop yield-What do we really know? Soil Tillage Res. 2017, 174, 193–204. [Google Scholar] [CrossRef]
- Feng, X.M.; Hao, Y.B.; Latifmanesh, H.; Lal, R.; Cao, T.H.; Guo, J.R.; Deng, A.X.; Song, Z.W.; Zhang, W.J. Effects of subsoiling tillage on soil properties, maize root distribution, and grain yield on mollisols of northeastern China. Soil Tillage Conserv. Manag. 2018, 110, 1607–1615. [Google Scholar] [CrossRef]
- Zhang, R.F.; Yang, H.S.; Gao, J.L.; Zhang, Y.Q.; Wang, Z.G.; Fan, X.Y.; Bi, W.B. Effect of subsoiling on root morphological and physiological characteristics of spring maize. Trans. CSAE 2015, 31, 78–84. [Google Scholar] [CrossRef]
- Carr, P.M. Guest Editorial: Conservation Tillage for Organic Farming. Agriculture 2017, 7, 19. [Google Scholar] [CrossRef] [Green Version]
- Wichelns, D. Achieving Water and Food Security in 2050: Outlook, Policies, and Investments. Agriculture 2015, 5, 188–220. [Google Scholar] [CrossRef] [Green Version]
- Mullan, D. Managing Soil Erosion in Northern Ireland: A Review of Past and Present Approaches. Agriculture 2013, 3, 684–699. [Google Scholar] [CrossRef] [Green Version]
- Pimentel, D.; Burgess, M. Soil Erosion Threatens Food Production. Agriculture 2013, 3, 443–463. [Google Scholar] [CrossRef] [Green Version]
- 2016–2022 China’s Subsoiling and Land Preparation Industry Special Investigation and 13th Five-Year Investment Prospect Forecast Report. Available online: http://baogao.chinabaogao.com/xumuye/245071245071.html (accessed on 6 August 2020).
- Department of Farm Mechanization of Ministry of agriculture and rural affairs of the People’s Republic of China. National Agricultural Mechanization Statistics Annual Report; Department of Farm Mechanization of MOA: Beijing, China, 2018; p. 14.
- Ministry of Agriculture and Rural Affairs of the People’s Republic of China. National Agricultural Machinery Subsoiling and Land Preparation Operation Implementation Plan (2016–2020). Available online: http://www.moa.gov.cn/nybgb/2016/disanqi/201711/t20171127_5920218.htm (accessed on 8 August 2020).
- State Council of the People’s Republic of China. Government Work Report. 2015. Available online: http://www.gov.cn/guowuyuan/2015-03/16/content_2835101.htm (accessed on 8 August 2020).
- State Council of the People’s Republic of China. Government Work Report. 2014. Available online: http://www.gov.cn/guowuyuan/2014-03/14/content_2638989.htm (accessed on 8 August 2020).
- State Council of the People’s Republic of China. Central Document No.1. 2014. Available online: https://wenku.baidu.com/view/7384313ceff9aef8941e06e8.html (accessed on 8 August 2020).
- Ministry of Agriculture of the People’s Republic of China. National Agricultural Machinery Subsoiling and Land Preparation Operation Implementation Plan (2011–2015). Available online: http://www.moa.gov.cn/nybgb/2011/deq/201805/t20180518_6142547.htm (accessed on 8 August 2020).
- State Council of the People’s Republic of China. Opinions of the State Council on Promoting Sound and Rapid Development of Agricultural Mechanization and Agricultural Machinery Industry. 2010. Available online: http://www.gov.cn/zhengce/content/2010-07/09/content_3009.htm (accessed on 8 August 2020).
- State Council of the People’s Republic of China. Central Document No.1. 2010. Available online: http://finance.sina.com.cn/g/20100131/17047342371.shtml (accessed on 8 August 2020).
- Ministry of Finance of the People’s Republic of China. Interim Measures for the Administration of the Centralized use of the Newly Increased Central Funds for Comprehensive Agricultural Subsidies for the Building of Basic Grain Capacity. 2009. Available online: http://www.chinalawedu.com/falvfagui/fg22016/514036.shtml (accessed on 8 August 2020).
- State Council of the People’s Republic of China. Central Document No.1. 2009. Available online: http://www.jingbian.gov.cn/xiwzx/yw/319.htm (accessed on 8 August 2020).
- He, J.; Li, H.W.; Chen, H.T.; Lu, C.Y.; Wang, Q.J. Research progress of conservation tillage technology and machine. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–18. [Google Scholar] [CrossRef]
- Li, B.F. Agricultural Mechanics; China Agriculture Press: Beijing, China, 2003; pp. 35–37. [Google Scholar]
- Arable Land (Hectares per Person). Available online: https://data.worldbank.org/indicator/AG.LND.ARBL.HA.PC (accessed on 11 August 2020).
- Maschio DIABLO Subsoiling Combined Machine. Available online: http://www.maschio.com/catalog/product/diablo/it_IT (accessed on 3 September 2020).
- John Deere 2730 Subsoiling Combined Machine. Available online: https://www.deere.com/en/tillage/2730-combination-ripper/ (accessed on 3 September 2020).
- Agrowplow AP31 Subsoiling Plough. Available online: http://www.agrowplow.com.au/agrowplow-ap31-plough (accessed on 3 September 2020).
- Salfordgroup 9200 Subsoiling Plough. Available online: https://salfordgroup.com/9200-in-line-ripper (accessed on 5 September 2020).
- Shandongdahua 1S-300C Omni-Directional Subsoiler. Available online: http://www.dhbl.net/product/73.html (accessed on 5 September 2020).
- Shandongaolong 1SQ-330 Omni-Directional Subsoiler. Available online: http://www.sdaljx.com/zhsh.asp?id=520 (accessed on 5 September 2020).
- Zhang, J.B. Bionic Drag Reduction and Wear-Resistant Theory and Techniques of Subsoiler. Ph.D. Thesis, Jilin University, Jilin, China, 2014. [Google Scholar]
- Khalilian, A.; Han, Y.J.; Marshall, M.W.; Gorucu, S.; Abbaspour, G.Y.; Kirk, K.R. Evaluation of the clemson instrumented subsoiler shank in coastal plain soils. Comput. Electron. Agric. 2014, 109, 46–51. [Google Scholar] [CrossRef]
- Liu, J.A.; Wang, X.Y.; Li, H.W.; He, J.; Wang, Q.J.; Li, W. Optimization of structural parameters of subsoiler based on soil disturbance and traction resistance. Trans. Chin. Soc. Agric. Mach. 2017, 48, 60–67. [Google Scholar] [CrossRef]
- Lee, J.; Yamazaki, M.; Oidab, A.; Nakashimac, H.; Shimizub, H. Electro-hydraulic tillage depth control system for rotary implements mounted on agricultural tractor Design and response experiments of control system. J. Terramech. 1998, 35, 229–238. [Google Scholar] [CrossRef]
- Garrido, M.; Conceição, L.A.; Baguena, E.M.; Valero, C.; Barreiro, P. Evaluating the need for an active depth-control system for direct seeding in Portugal. In Proceedings of the 8th European Conference Precision Agriculture, Prauge, Czech Republic, 11–14 July 2011; Wageningen Academic Publishers: Wageningen, The Netherlands. [Google Scholar]
- Suomi, P.; Oksanen, T. Automatic working depth control for seed drill using ISO 11783 remote control messages. Comput. Electron. Agric. 2015, 116, 30–35. [Google Scholar] [CrossRef]
- Wang, S.L.; Liang, H. Development and application of intelligent supervision system for agricultural machinery subsoiling. Hebei Agric. Mach. 2016, 3, 10–11. [Google Scholar]
- Pereira, D.P.; Fiedler, N.C.; Juliao, S.L. Efficiency of subsoiling depth according to the slope of the land. Cerne 2012, 18, 607–612. [Google Scholar] [CrossRef]
- Tian, S.Z.; Wang, Y.; Zhang, F.Y.; Bian, W.F.; Dong, L.; Luo, J.F.; Guo, H.H. Residue returning with subsoiling replacing rotary tillage improving aggregate and associated carbon. Trans. CSAE 2017, 33, 133–140. [Google Scholar] [CrossRef]
- Kayad, A.; Paraforos, D.S.; Marinello, F.; Fountas, S. Latest Advances in Sensor Applications in Agriculture. Agriculture 2020, 10, 362. [Google Scholar] [CrossRef]
- Yu, Y.C.; Liu, W.Y.; Zhao, Y.C.; Sun, J.Q. Force mathematical model and examination analysis of the column subsoiler. Trans. CSAE 2007, 23, 109–113. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, L.; Yu, H.Y.; Xiao, Y.K. Finite element analysis and experiment of soil resistance of multiplex-modality subsoiler. Trans. Chin. Soc. Agric.Mach. 2012, 43, 61–65. [Google Scholar] [CrossRef]
- Lemken 1S-225C Subsoiler. Available online: https://lemken.com/en/soil-cultivation/stubble-cultivation/subsoiler/labrador/ (accessed on 15 September 2020).
- Hedongxiongfeng 1S-150A Subsoiler. Available online: http://www.hedongxiongfeng.cn/pd.jsp?id=52#_pp=103_366 (accessed on 15 September 2020).
- Maschio PINOCCHIO200 Subsoiler. Available online: http://www.maschio.com/catalog/category/dissodatori-di-profondita/zh_cmn (accessed on 15 September 2020).
- Zhongnongboyuan 1S-200 Subsoiler. Available online: http://www.boyomac.com/product/17.html (accessed on 14 May 2021).
- Woye 1SQ-340 Subsoiler. Available online: https://www.nongjitong.com/product/3072.html (accessed on 15 September 2020).
- DALBO Ratoon Subsoiler. Available online: https://www.cnmasike.com/agriculture/used-other-agricultural-machines/dal-bo-ratoon/be6ohtgr.html (accessed on 15 September 2020).
- Shandongdahua 1S-250 Subsoiler. Available online: https://www.dhbl.net/product/53.html (accessed on 15 September 2020).
- Kostencki, P.; Stawicki, T.; Bialobrzeska, B. Durability and wear geometry of subsoiler shanks provided with sintered carbide plates. Tribol. Int. 2016, 104, 19–35. [Google Scholar] [CrossRef]
- Chen, K. Study on Structural Optimization of Extroverted arc Subsoiler. Master’s Thesis, Jilin Agriculture University, Jilin, China, 2017. [Google Scholar]
- Zhao, S.H.; Wang, J.Y.; Chen, J.Z.; Yang, Y.Q.; Tan, H.W. Design and experiment of fitting curve subsoiler of conservation tillage. Trans. Chin. Soc. Agric. Mach. 2018, 49, 82–92. [Google Scholar] [CrossRef]
- Wang, X.Z.; Yue, B.; Gao, X.J.; Zheng, Z.Q.; Zhu, R.X.; Huang, Y.X. Discrete element simulations and experiments of disturbance behavior as affected by mounting height of subsoiler’s wing. Trans. Chin. Soc. Agric. Mach. 2018, 49, 124–136. [Google Scholar] [CrossRef]
- Peng, Z.M.; Ding, Y.; Zhu, J.P.; Yuan, D. Technical analysis and research of detection in energy-saving emission reduction to farming machinery. Chin. Agric. Mech. 2009, 225, 69–75. [Google Scholar] [CrossRef]
- Sun, Y.P.; Dong, X.Q.; Song, J.N.; Liu, C.L.; Wang, J.C.; Zhang, C. Parameter optimization of vibration subsoiler test bed for reducing resistance and vibration. Trans. CSAE 2016, 32, 43–49. [Google Scholar] [CrossRef]
- Li, X.; Zhang, D.X.; Wang, W.X.; Cui, T.; Tang, M.J. Performance parameter optimization and experiment of forced-vibration subsoiler. Trans. CSAE 2015, 31, 17–24. [Google Scholar] [CrossRef]
- Li, X.; Fu, J.F.; Zhang, D.X.; Cui, T.; Zhang, R. Experiment analysis on traction resistance of vibration subsoiler. Trans. CSAE 2012, 28, 32–36. [Google Scholar] [CrossRef]
- Shahgoli, G.; Fielke, J.; Desbiolles, J.; Saunders, C. Optimising oscillation frequence in oscillation tillage. Soil Tillage Res. 2009, 106, 202–210. [Google Scholar] [CrossRef]
- Linde, J.V.D. Discrete Element Modeling of a Vibratory Subsoiler. Ph.D. Thesis, Stellenbosch University, Stellenbosch, South Africa, 2007. [Google Scholar]
- Zhang, J.C.; Yan, X.L.; Lin, Z.K.; Zhu, R.X. Design and experiment of self-exciting vibration deep-loosening and sub-soiling machine. Trans. Chin. Soc. Agric. Mach. 2016, 47, 44–49. [Google Scholar] [CrossRef]
- Ma, X.; Qiu, L.C.; Milecki, Z. Experimental study on the dynamic characteristics of spring-tooth vibration sub-soiling shovel. J. Mech. Eng. Res. Dev. 2016, 39, 127–133. [Google Scholar] [CrossRef]
- Soeharsono, S.; Radite, P.A.M.; Tineke, S.; Asep, H.; Wawan. Penurunan Draft Dan Energy Pembajakan Pada Model Subsoiler Getar Dengan Menggunakan Metode Self-Excited Vibration. Ph.D. Thesis, Bogor Agriculture University, Bogor, Indonesia, 2012. [Google Scholar]
- Qiu, L.C.; Li, B.F. Experimental study on the self-excited vibration subsoiler for reducing draft force. Trans. CSAE 2000, 16, 72–76. [Google Scholar] [CrossRef]
- Tong, J.; Sun, J.Y.; Chen, D.H.; Zhang, S.J. Geometrical features and wettability of dung beetles and potential biomimetic engineering applications in tillage implements. Soil Tillage Res. 2005, 80, 1–12. [Google Scholar] [CrossRef]
- Zhang, J.B.; Tong, J.; Ma, Y.H. Design and experiment of bionic anti-drag subsoiler. Trans. Chin. Soc. Agric. Mach. 2014, 45, 141–145. [Google Scholar] [CrossRef]
- Li, B.; Chen, Y.; Chen, J. Modeling of soil-claw interaction using the discrete element method (DEM). Soil Tillage Res. 2016, 158, 177–185. [Google Scholar] [CrossRef]
- Zhang, X.R.; Wang, C.; Chen, Z.X.; Zeng, Z.W. Design and experiment of a bionic vibratory subsoiler for banana fields in southern China. Int. J. Agric. Biol. Eng. 2016, 9, 75–83. [Google Scholar] [CrossRef]
- Wang, T.H.; Zhang, W.A.; Wang, L.B.; Yu, M.; Song, D.Q.; Yu, L. Stress analysis and subsoiling quality research of layered deep loosening shovel. Farm Mach. 2012, 32, 94–96. [Google Scholar]
- Kasisira, L.L.; Plessis, H.L.M.D. Energy optimization for subsoilers in tandem in a sandy clay loam soil. Soil Tillage Res. 2006, 86, 185–198. [Google Scholar] [CrossRef]
- Wang, H.L.; Zhang, W. Optimization design of the subsoiling shovel structural parameters based on Pro/E. J. Agric. Mech. Res. 2011, 1, 141. [Google Scholar] [CrossRef]
- Kichler, C.M.; Fulton, J.P.; Raper, R.L.; Mcdonald, T.P.; Zech, W.C. Effects of transmission gear selection on tractor performance and fuel costs during deep tillage operations. Soil Tillage Res. 2011, 113, 105–111. [Google Scholar] [CrossRef] [Green Version]
- Zhu, F.W. Analysis of the Morphology of Scarabaeoidea and Bionic Design of Subsoiling Components. Ph.D. Thesis, Jilin University, Jilin, China, 2005. [Google Scholar]
- Yang, Z.J.; Zheng, K.; Geng, C.J.; Xia, J.Q. Design of multi-channel ultrasonic wave sensor ranging system based on RS--485 bus. Transd. Microsyst. Technol. 2018, 37, 79–82. [Google Scholar] [CrossRef]
- Mouazen, A.M.; Anthonis, J.; Saeys, W.; Ramon, H. An automatic depth control system for online measurement of spatial variation in soil compaction 1. Sensor design for measurement of frame height variation from soil surface. Biosyst. Eng. 2004, 89, 139–150. [Google Scholar] [CrossRef]
- Li, Z.X. Research and design of operating depth measurement apparatus for farm implement. Trans. Chin. Soc. Agric. Mach. 2000, 31, 8–91. [Google Scholar] [CrossRef]
- Adamchuk, V.I.; Hummel, J.W.; Morgan, M.T.; Upadhyaya, S.K. On-the-go soil sensors for precision agriculture. Comput. Electron. Agric. 2004, 44, 71–91. [Google Scholar] [CrossRef] [Green Version]
- Yuan, Y.W.; Fang, X.F.; Yang, B.N.; Liang, X.X.; Dong, X.; Zhou, L.M.; Zhang, J.N. A Suspended Subsoiler and Its Online Detection Device and Method. CHN CN104977586-A, 14 October 2015. [Google Scholar]
- Zheng, Y.H. Study on Sensing Mechanism of Gas Pendulum Tilt Sensor and the Key Factors of Affecting its Property. Ph.D. Thesis, Beijing University of Post and Telecommunications, Beijing, China, 2008. [Google Scholar]
- Zhao, J.; He, P.X.; Li, Q.D.; Jiang, M.; Kang, J.; Liu, H.B.; Zhu, K.X. Design of depth display system for micro-tiller. J. Agric. Mech. Res. 2016, 10, 83–86. [Google Scholar] [CrossRef]
- Li, Q.L.; Sun, Y.J.; Sun, Y.T.; Shen, J.X.; Chen, G.; Dou, Q.Q. Development of DSP-based joint operations subsoiling machine monitoring system. J. Agric. Mech. Res. 2016, 11, 118–122. [Google Scholar] [CrossRef]
- Xie, B.; Li, H.; Zhu, Z.X.; Mao, E.R. Measuring tillage depth for tractor implement automatic using inclinometer. Trans. CSAE 2013, 39, 15–21. [Google Scholar] [CrossRef]
- Ayiding, K.; Wu, M.T.; He, P.X.; Liu, X.R.; Sun, B. The control system of automatic adjust for plowing depth. J. Agric. Mech. Res. 2013, 3, 160–163. [Google Scholar] [CrossRef]
- Jia, H.L.; Guo, M.Z.; Yu, H.B.; Li, Y.; Feng, X.Z.; Zhao, J.L.; Qi, J.T. An adaptable tillage depth monitoring system for tillage machine. Biosyst. Eng. 2016, 151, 187–199. [Google Scholar] [CrossRef]
- Shang, G.G.; Peng, H.J.; Xia, Y. Study on auto-control method and simulation for tractor depth based on fuzzy control. Res. Agric. Mod. 2014, 35, 825–829. [Google Scholar] [CrossRef]
- Xie, B.; Mao, E.R. Development of CAN intelligent nodes of tractor electronic hydraulic hitch system. Trans. Chin. Soc. Agric. Mach. 2006, 37, 1–3. [Google Scholar] [CrossRef]
- Nie, Y.H.; Kang, J.; He, J.H.; He, P.X.; Li, Q.R. Deep tillage automatically adjust the design and test of control system. J. Agric. Mech. Res. 2015, 2, 143–145. [Google Scholar] [CrossRef]
- HE-VA Combined Land Preparation Equipment Equipped with Hydraulic System. Available online: https://www.he-va.co.uk/he-va-products/cultivation/combi-disc/ (accessed on 16 December 2020).
- John Deere 2633VT with TruSet™ Tillage Technology. Available online: https://www.deere.com/en/tillage/truset/ (accessed on 16 December 2020).
- CASE IH Tillage Tools Equipped with Advanced Farming System. Available online: https://www.caseih.com/northamerica/en-us/products/advanced-farming-systems/field-solutions/afs-soil-command (accessed on 16 December 2020).
- He, J.; Wu, Y.H.; Li, H.W.; Wang, Q.J.; Lu, C.Y.; Zhang, Z.Q.; Zheng, K.; Liu, W.Z.; Zhao, H.B.; Ju, J.W.; et al. A Device, a Universal Type, Automatically Monitoring and Controlling Tillage Depth of Each Subsoiler Shank. CHN CN107980261-A, 4 May 2018. [Google Scholar]
- Wang, Y.X.; Jing, H.R.; Zhang, D.X.; Cui, T.; Zhong, X.J.; Yang, L. Development and performance evaluation of an electric-hydraulic control system for subsoiler with flexible tines. Comput. Electron. Agric. 2018, 151, 249–257. [Google Scholar] [CrossRef]
- Wu, Y.H. The Design of Depth Automatic Monitoring Control Subsoiler Based on Ultrasonic Sensor and Hydraulic Drive. Master’s Thesis, China Agriculture University, Beijing, China, 2018. [Google Scholar]
- Chen, K.; Hu, X.L.; Zhao, X.Z.; Yuan, H.Y. Research status and prospects of subsoilier at home and abroad. Agric. Technol. 2010, 30, 30–34. [Google Scholar]
- Wheeler, P.N.; Godwin, R.J. Soil dynamics of single and multiple tines at speeds up to 20 km/h. J. Agric. Eng. Res. 1996, 63, 243–250. [Google Scholar] [CrossRef] [Green Version]
- Manuwa, S.I. Performance evaluation of tillage tines operating under different depths in a sandy clay loam soil. Soil Tillage Res. 2009, 103, 399–405. [Google Scholar] [CrossRef]
- Ma, S.F. Force Analysis and Computer Simulation of the Subsoiler in Working State. Master’s Thesis, Henan Agriculture University, Henan, China, 2004. [Google Scholar]
- Zhou, Y.Q. Force Mathematic Model and Computer Simulation of the Subsoiler. Master’s Thesis, Henan Agriculture University, Henan, China, 2006. [Google Scholar]
- Mak, J.; Chen, Y.; Sadek, M.A. Determining parameters of a discrete element model for soil-tool interaction. Soil Tillage Res. 2012, 118, 117–122. [Google Scholar] [CrossRef]
- Chen, Y.; Munkholm, L.J.; Nyord, T. A discrete element model for soil-sweep interaction in three different soils. Soil Tillage Res. 2013, 126, 34–41. [Google Scholar] [CrossRef]
- Shmulevich, I.; Asaf, Z.; Rubinstein, D. Interaction between soil and a wide cutting blade using the discrete element method. Soil Tillage Res. 2007, 97, 37–50. [Google Scholar] [CrossRef]
- Zeng, Z.W.; Ma, X.; Chen, Y.; Qi, L. Modelling residue incorporation of selected chisel ploughing tools using the discrete element method (DEM). Soil Tillage Res. 2020, 197, 1–14. [Google Scholar] [CrossRef]
- Momozu, M.; Oida, A.; Yamazaki, M.; Koolen, A.J. Simulation of a soil loosening process by means of the modified distinct element method. J. Terramechanics. 2003, 39, 207–220. [Google Scholar] [CrossRef]
- Tamas, K.; Jori, I.J.; Mouazen, A.M. Modelling soil–sweep interaction with discrete element method. Soil Tillage Res. 2013, 134, 223–231. [Google Scholar] [CrossRef] [Green Version]
- Hang, C.G.; Huang, Y.X.; Zhu, R.X. Analysis of the movement behaviour of soil between subsoilers based on the discrete element method. J. Terramech. 2017, 74, 35–43. [Google Scholar] [CrossRef]
- Zhao, J.G.; Li, J.C.; Wang, A.; Ma, L.P.; Hao, J.J.; Zhang, J.G.; Ma, Y.J. Improvement of wear resistance of deep-shovel tip with Fe-based alloycoating by flame spray welding residual temperature quenching. Trans. CSAE 2018, 34, 65–71. [Google Scholar] [CrossRef]






| Regulation | Related Content |
|---|---|
| Ministry of Agriculture and Rural Affairs: National agricultural machinery subsoiling and land preparation operation implementation plan (2016–2020) [27] | In 2016–2020, the nationwide annual operation area of subsoiling and land preparation via agricultural machinery exceeds 10 million ha |
| State Council: Government Work Report [a] (2015) [28] | Promote land renovation, add 13.33 million ha land under subsoiling and land preparation |
| State Council: Government Work Report (2014) [29] | Launch a pilot project to adopt subsoiling and land preparation technology covering 6.67 million ha |
| State Council: Central Document No.1 [b] (2014) [30] | Give great impetus to advance mechanization of subsoiling and land preparation |
| Ministry of Agriculture: National agricultural machinery subsoiling and land preparation operation implementation plan(2011–2015) [31] | A total of 71.3 million ha area in the nation will be subsoiled in 2011–2015 |
| State Council: Opinions of the State Council on promoting sound and rapid development of agricultural mechanization and agricultural machinery industry (2010) [32] | Implement pilot projects to subsidize subsoiling and land preparation at suitable regions |
| State Council: Central Document No.1 (2010) [33] | Give great impetus to extend subsoiling and land preparation machinery |
| Ministry of Finance: Interim measures for the administration of the centralized use of the newly increased central funds for comprehensive agricultural subsidies for the building of basic grain capacity (2009) [34] | Bring conservation tillage methods such as subsoiling and land preparation into the key support scope of the newly increased agricultural funds for comprehensive subsidies |
| State Council: Central Document No.1 (2009) [35] | Implement pilot projects to subsidize the mechanized operation in the key link |
| Working ((((((Function | Type | Company | Country | Mechanism | Working Width (mm) | Matched Power (kW) | Features |
|---|---|---|---|---|---|---|---|
| Combined machine | DIABLO [39] | Maschio | Italy | Two-row winged shovels; Stubble breaking discs; Rear rollers with two rows of discs | 5000–7000 | 300–400 | Having ample clearance between shovels and rear discs |
| Combined machine | 2730 [40] | John Deere | USA | Two rows of stubble breaking discs arranged symmetrically; Spring-tooth harrows; A suppress roller | 4300–6800 | 250–460 | Lower operation costs |
| Subsoiling plough | AP31 [41] | Agrowplow | Australia | Nine deep tillage ploughs; Two supporting wheels | 2310–2970 | 73.5–132.3 | Bolt-less for the quick changing of ploughs and points |
| Subsoiling plough | 9200 [42] | Salford | Britain | Seven shovels with 0.99m spacing | 5320 | 206 | Equipped with automatic spring reset obstacle protection system |
| Omni-directional subsoiler | 1S-300C [43] | Dahua | China | The chisel shovel with left and right winged shovels; Three rows beams; A suppress roller; Two gauge wheels | 3000 | 147–191.1 | With overload protection |
| Omni-directional subsoiler | 1SQ-330 [44] | Aolong | China | Six side bended shovels; Two gauge wheels; A suppress roller | 3300 | 99.2–154.4 | Tips of two shovels arranged symmetrically forms an inverted trapezoid |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lou, S.; He, J.; Li, H.; Wang, Q.; Lu, C.; Liu, W.; Liu, P.; Zhang, Z.; Li, H. Current Knowledge and Future Directions for Improving Subsoiling Quality and Reducing Energy Consumption in Conservation Fields. Agriculture 2021, 11, 575. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11070575
Lou S, He J, Li H, Wang Q, Lu C, Liu W, Liu P, Zhang Z, Li H. Current Knowledge and Future Directions for Improving Subsoiling Quality and Reducing Energy Consumption in Conservation Fields. Agriculture. 2021; 11(7):575. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11070575
Chicago/Turabian StyleLou, Shangyi, Jin He, Hongwen Li, Qingjie Wang, Caiyun Lu, Wenzheng Liu, Peng Liu, Zhenguo Zhang, and Hui Li. 2021. "Current Knowledge and Future Directions for Improving Subsoiling Quality and Reducing Energy Consumption in Conservation Fields" Agriculture 11, no. 7: 575. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11070575