
Counting Dense Leaves under Natural Environments via an Improved Deep-Learning-Based Object Detection Algorithm

 ,
,  , ,
, ,
Abstract
:1. Introduction
- (1)
- to architecturally improve the current CenterNet network (i.e., improved CenterNet) with the specific focus on overlapped leaves in canopy images captured under natural light conditions;
- (2)
- to verify the performance of our improved CenterNet with other commonly used deep neural networks, including Mask R-CNN, Faster R-CNN, YOLOv4 and original CenterNet, as well as a commonly used traditional machine learning method;
- (3)
- to validate the value and significance of our improved CenterNet by using several plant species with different shapes and sizes in leaves.
2. Materials and Methods
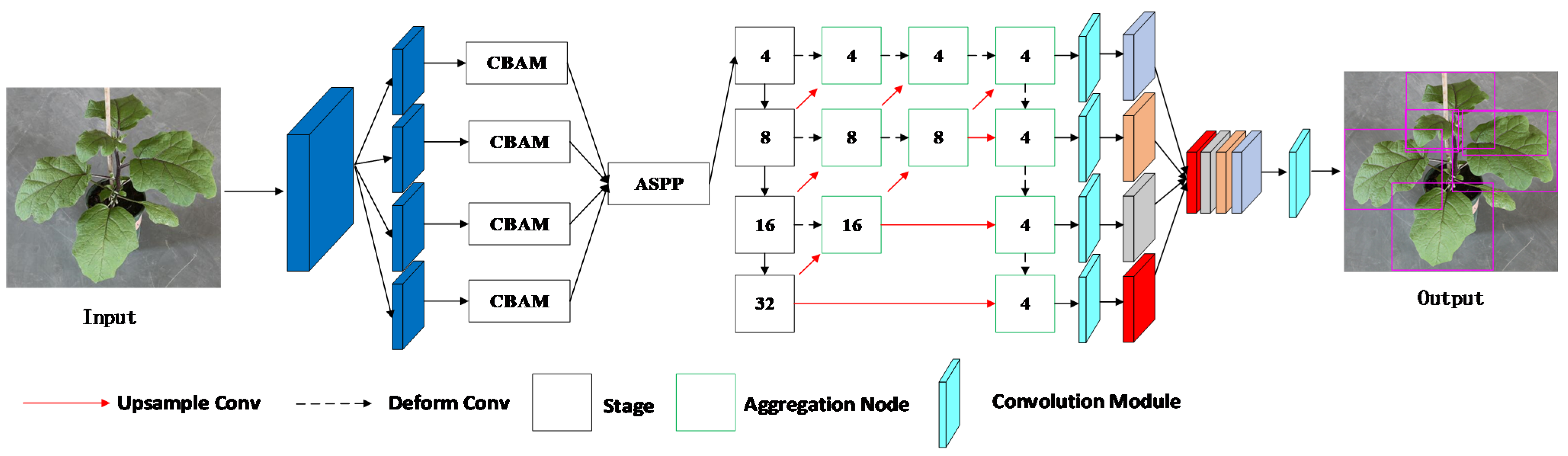
2.1. Motivation in Improving CenterNet Algorithm
- (1)
- Since leaves have significantly different sizes at different growth stages, a space-to-depth module was used to convert the input image into feature maps with different resolutions. In this way, the detection performance for small leaves could be improved by high-resolution feature maps;
- (2)
- For accurate extraction of edge information of overlapped leaves, an attention mechanism CBAM was used behind each resolution feature map. This allowed the network to focus on the key information that distinguishes the edge features of each leaf.
- (3)
- To address the influence of different factors and the effective combination of different features, atrous convolutions and atrous spatial pyramid pooling (ASPP) modules were used to extract the image receptive field features at different scales. By combining the feature maps detected at different scales, the network could store more image information to facilitate the detection of plant leaves.
2.2. The Improved Network Structure
2.3. Space-to-Depth Module
2.4. Attention Mechanism
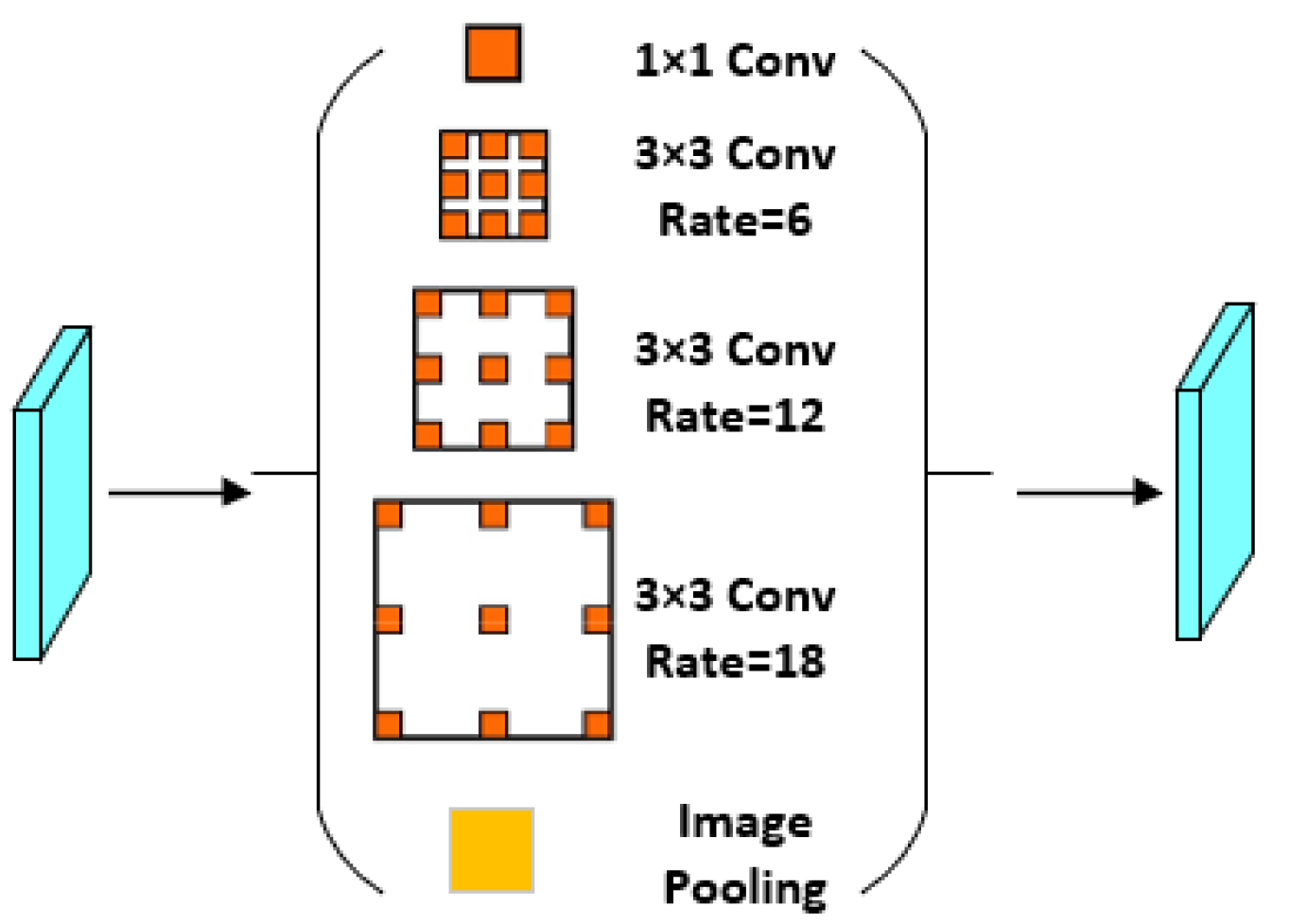
2.5. Atrous Spatial Pyramid Pooling
- 1 × 1 and 3 × 3 convolutions, with dilation rates of 6, 12, and 18;
- image-level features.
2.6. Modification on Loss Function
3. Experiments and Discussion
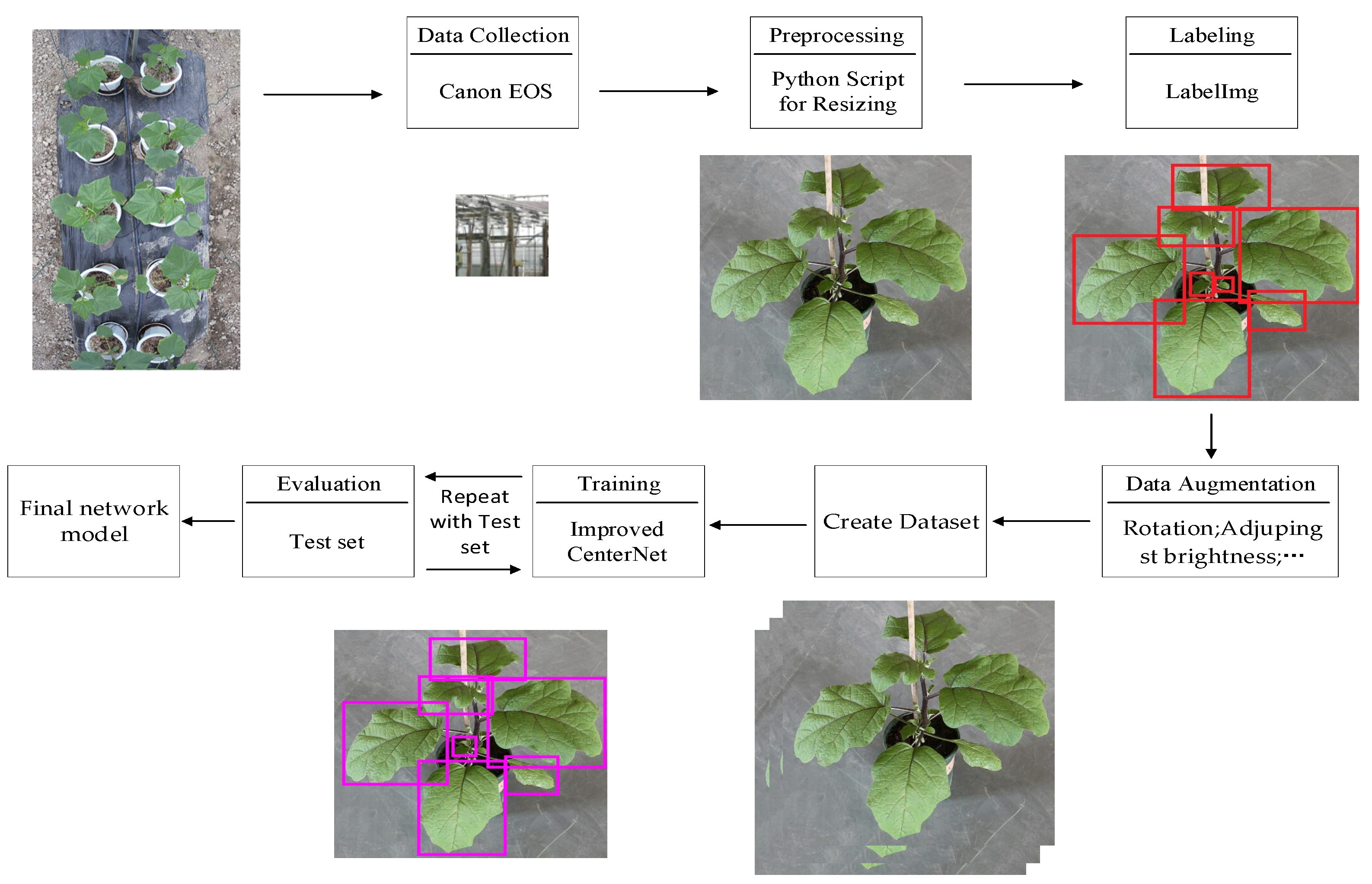
3.1. Data Acquisition and Organization
3.1.1. Data Acquisition
3.1.2. Image Labeling and Data Augmentation
3.2. Training and Testing
3.2.1. Implementation Protocol and Evaluation Parameters
3.2.2. Training
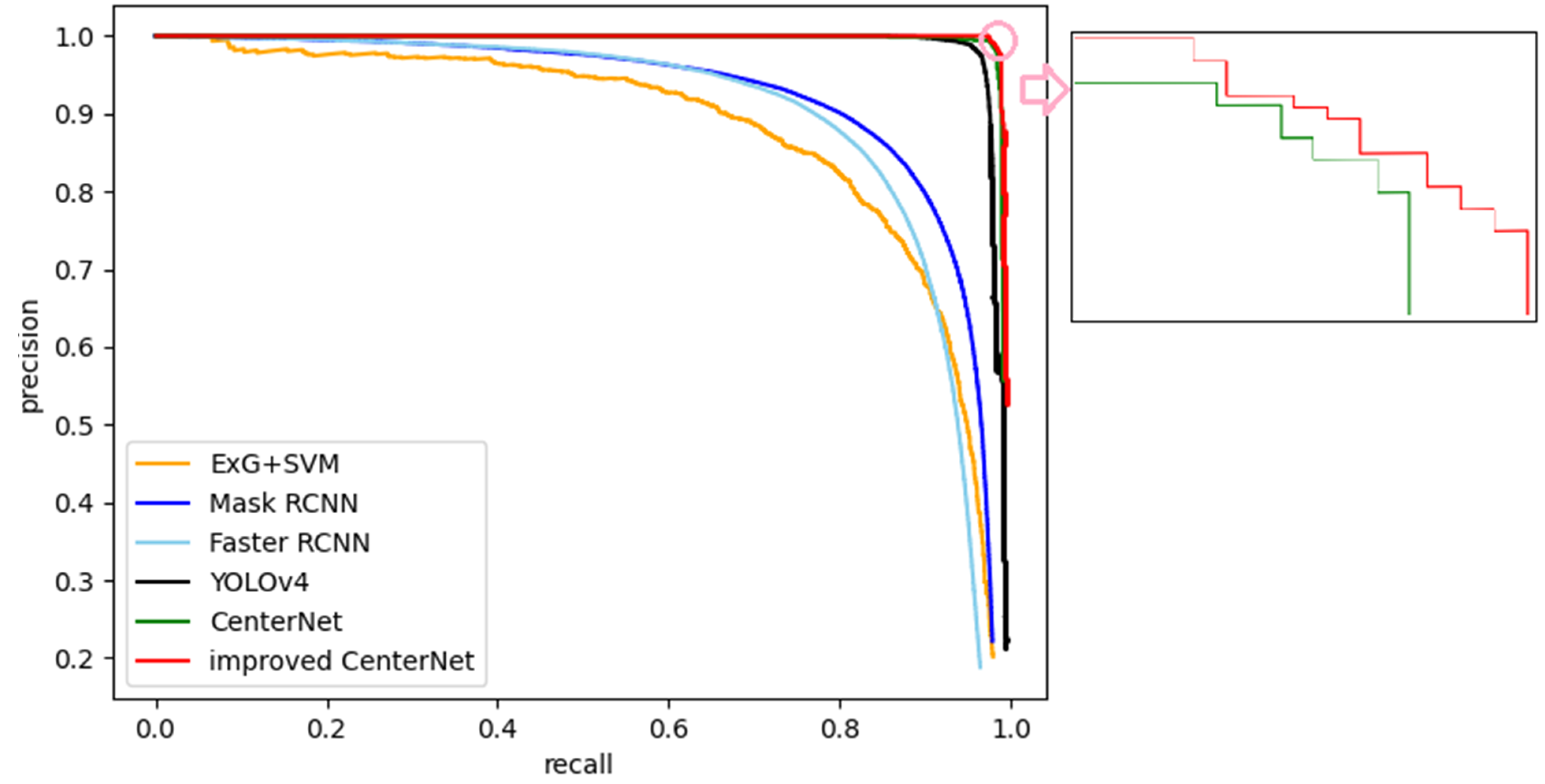
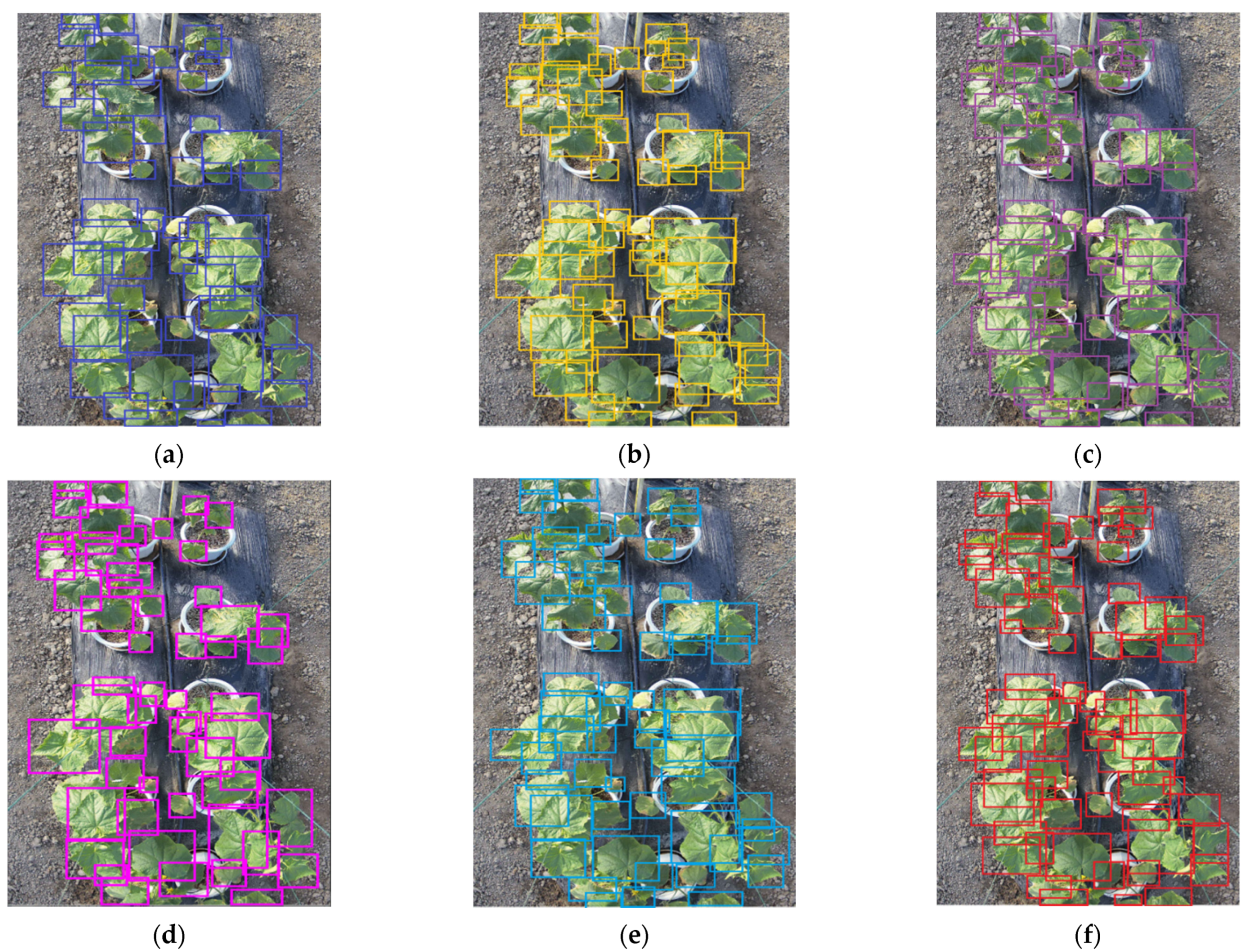
3.3. Comparison with the State-of-the-Art Methods
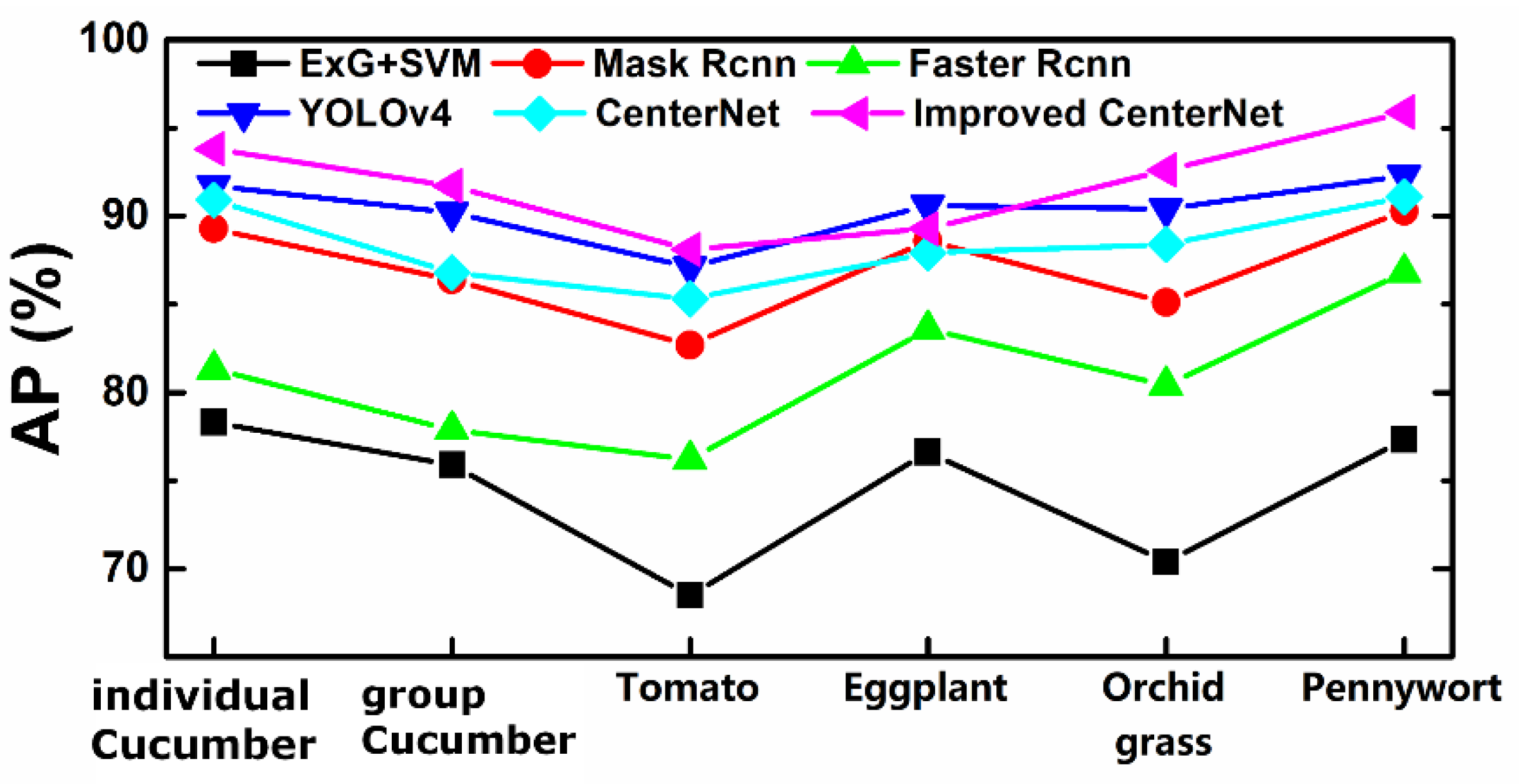
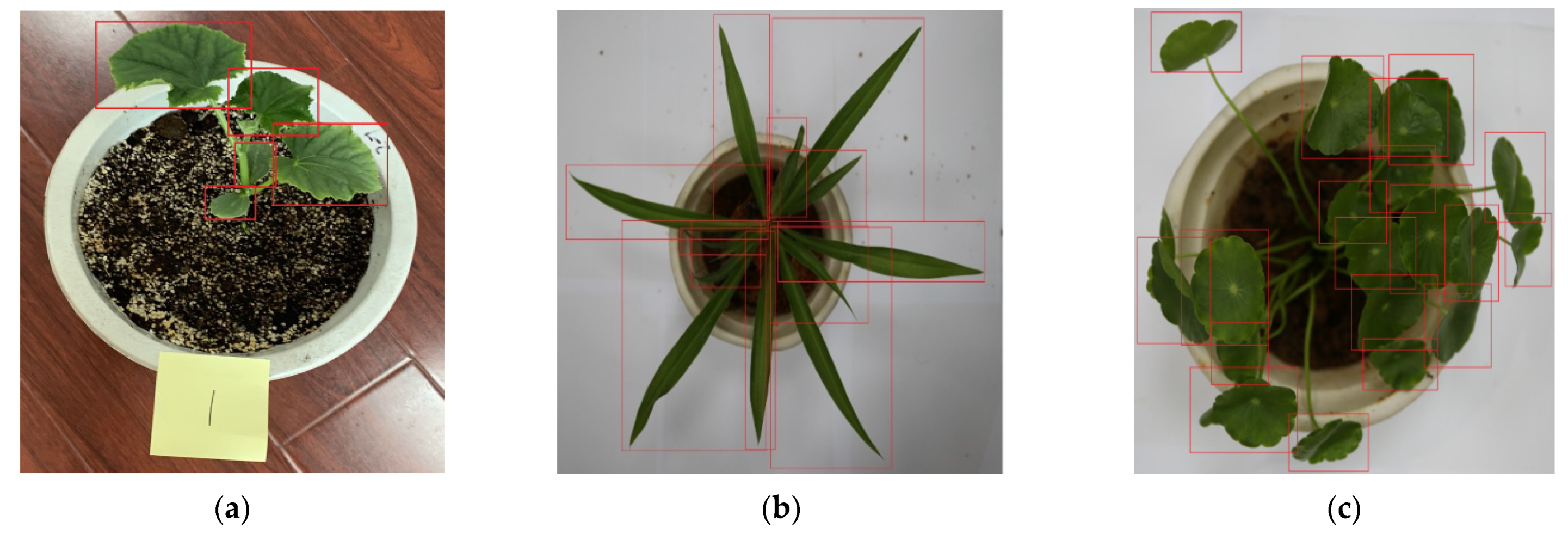
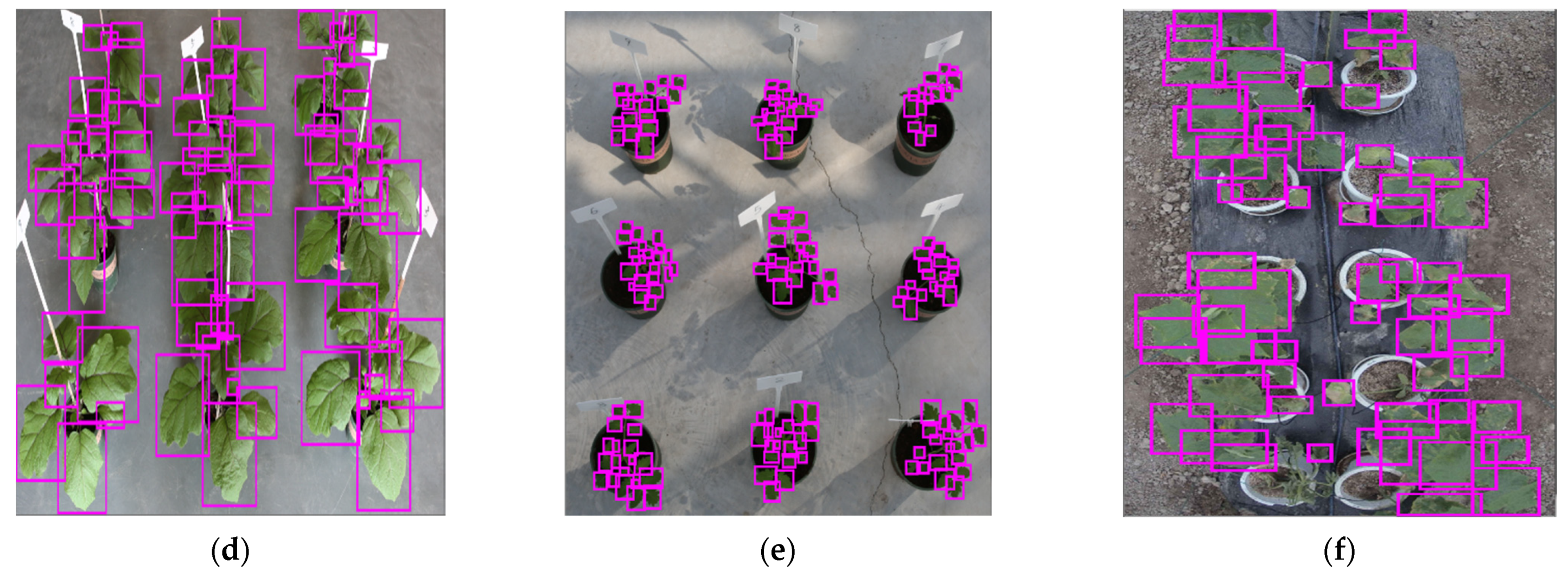
3.4. Detection Performance for Leaves with Different Shape and Silhouette
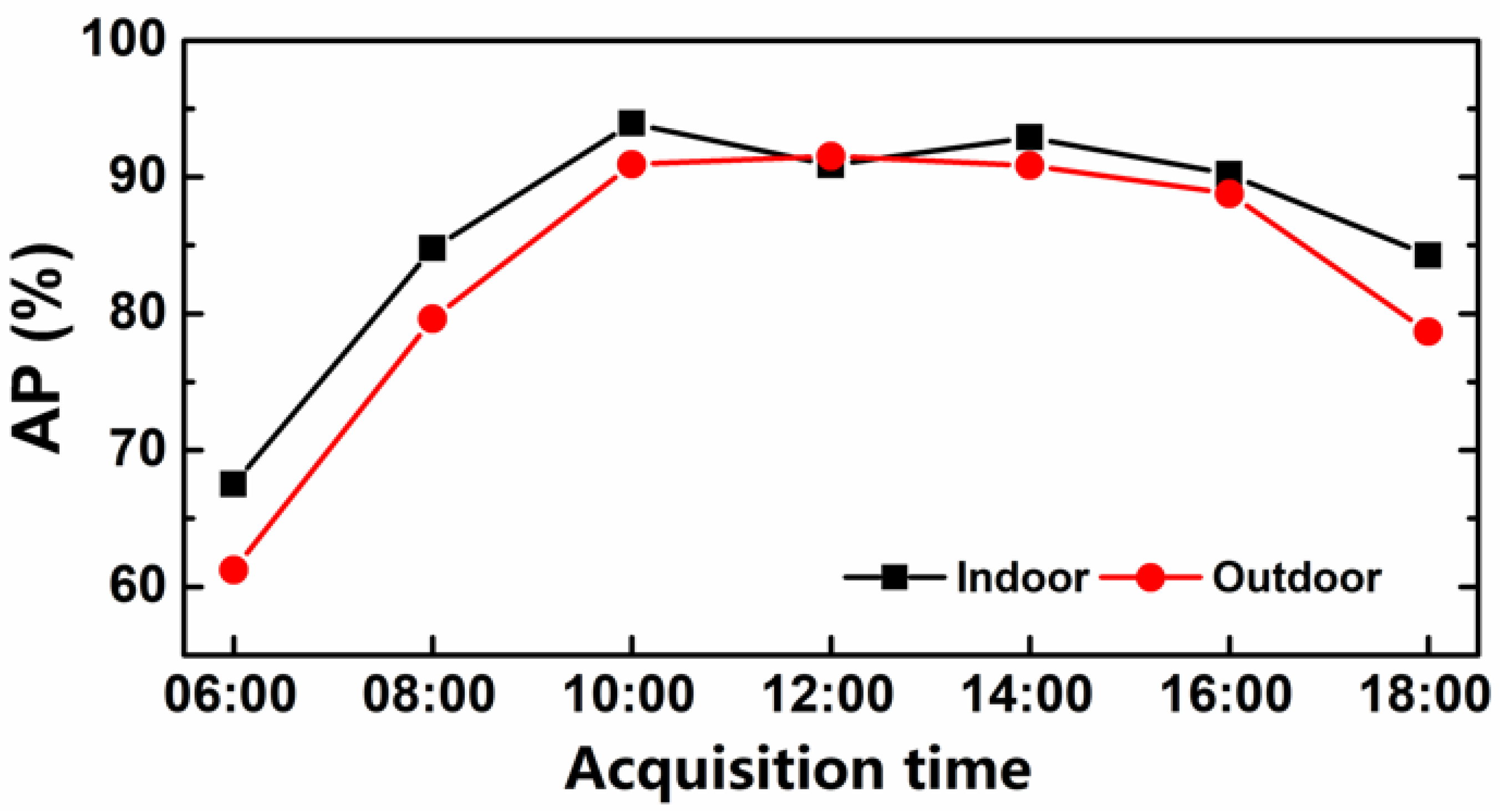
3.5. Detection Performance for Leaves under Different Light Condition and Background
4. Conclusions
- (1)
- Our proposed improved CenterNet included three major improvements: (i) a space-to-depth module was added to the inputs of the network in the original CenterNet, for converting the input images into different depth modules; (ii) a convolutional block attention module (CBAM) was adopted to detect leaf edge information at different resolutions; and (iii) atrous spatial pyramid pooling (ASPP) was also adopted to extract image receptive field features at different scales, in case of preserving the characteristics of dense and irregular leaves;
- (2)
- The improved CenterNet focused on the key points of the target area instead of the entire image, thereby spared the need for target segmentation and improved the accuracy and speed of detection. Apart from that, accurate detection of overlapped leaves necessitated the edge information of each leaf, along with specific constraints to suppress the background noise of the image. Traditional target detection algorithms did not make full use of the feature information of the target, as most of these algorithms used multi-scale fusion, deep network structure and loss function to obtain target features. Compare to traditional algorithms, our improved CenterNet leveraged a space-to-depth module and an attention mechanism module to enable the detection network to focus on the edge characteristics of leaves, thus facilitating the extraction of edge feature information and leaf counting.
- (3)
- The improved CenterNet detector proposed in this work accurately detected leaves at different growth stages, under different light conditions, and of different shapes and sizes. A better detection performance was achieved, compared to the commonly used deep learning-based algorithms (including Mask R-CNN, Faster R-CNN, YOLOv4 and original CenterNet) and traditional machine learning algorithm (ExG + SVM), which had almost the highest detection speed and the minimal training time on precision and recall. The detection accuracy of the improved CenterNet detector on images of the early growth stage was better than that on images of the late growth stage. The reason can be mostly attributed to fact that there are more leaves and occlusion in the canopy at the late growth stage of plant. Additionally, the detection accuracy of indoor images was slightly higher than that of outdoor images at different time nodes during daytime. This may result from good light conditions of the indoor images, which eliminated the influence of the bright sunlight.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cobb, J.N.; DeClerck, G.; Greenberg, A. Next-generation phenotyping: Requirements and strategies for enhancing our understanding of genotype–phenotype relationships and its relevance to crop improvement. Theor. Appl. Genet. 2013, 126, 867–887. [Google Scholar] [CrossRef] [Green Version]
- Rasheed, A.; Hao, Y.; Xia, X. Crop breeding chips and genotyping platforms: Progress, challenges, and perspectives. Mol. Plant 2017, 10, 1047–1064. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, W.; Feng, H.; Zhang, X. Crop phenomics and high-throughput phenotyping: Past decades, current challenges, and future perspectives. Mol. Plant 2020, 13, 187–214. [Google Scholar] [CrossRef] [Green Version]
- Bao, Y.; Tang, L.; Breitzman, M.W. Field-based robotic phenotyping of sorghum plant architecture using stereo vision. J. Field Robot. 2018, 36, 397–415. [Google Scholar] [CrossRef]
- Achanta, R.; Shaji, A.; Smith, K. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, X.; Liu, M.; Zhao, H. Leaf extraction from complicated background. In Proceedings of the 2nd International Congress on Image and Signal Processing, Tianjin, China, 17–19 October 2009; pp. 1–5. [Google Scholar]
- Yin, X.; Liu, X.; Chen, J. Multi-leaf tracking from fluorescence plant videos. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 408–412. [Google Scholar]
- Vylder, J.D.; Ochoa, D.; Philips, W. Leaf segmentation and tracking using probabilistic parametric active contours. In Proceedings of the International Conference on Computer Vision/Computer Graphics Collaboration Techniques and Applications, Rocquencourt, France, 10–11 October 2011; pp. 75–85. [Google Scholar]
- Dellen, B.; Scharr, H.; Torras, C. Growth signatures of rosette plants from time-lapse video. IEEE/ACM Trans. Comput. Biol. Bioinform. 2015, 12, 1470–1478. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grand-Brochier, M.; Vacavant, A.; Cerutti, G. Tree leaves extraction in natural images: Comparative study of preprocessing tools and segmentation methods. IEEE Trans. Image Process 2015, 24, 1549–1560. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cerutti, G.; Tougne, L.; Vacavant, A. A parametric active polygon for leaf segmentation and shape estimation. Int. Symp. Vis. Comput. 2011, 6938, 202–213. [Google Scholar]
- Pape, J.-M.; Klukas, C. 3-D histogram-based segmentation and leaf detection for rosette plants. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 5–12 September 2014; pp. 61–74. [Google Scholar]
- Scharr, H.; Minervini, M.; French, A.P. Leaf segmentation in plant phenotyping: A collation study. Mach. Vis. Appl. 2016, 27, 585–606. [Google Scholar] [CrossRef] [Green Version]
- Vukadinovic, D.; Polder, G. Watershed and supervised classification based fully automated method for separate leaf segmentation. In Proceedings of the The Netherlands Congress on Computer Vision, Lunteren, The Netherlands, 14–15 September 2015; pp. 1–2. [Google Scholar]
- Giuffrida, M.V.; Minervini, M.; Tsaftaris, S.A. Learning to count leaves in rosette plants. In Proceedings of the Computer Vision Problems in Plant Phenotyping (CVPPP), Swansea, UK, 7–10 September 2015; pp. 1–13. [Google Scholar]
- Arteta, C.; Lempitsky, V.; Noble, J.A. Interactive Object Counting. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 504–518. [Google Scholar]
- Fiaschi, L.; Nair, R.; Koethe, U. Learning to Count with Regression Forest and Structured Labels. In Proceedings of the 21st International Conference on Pattern Recognition (ICPR 2012), Tsukuba, Japan, 11–15 November 2012; pp. 2685–2688. [Google Scholar]
- Minervini, M.; Scharr, H.; Tsaftaris, S.A. Image analysis: The new bottleneck in plant phenotyping. IEEE Signal Process. Mag. 2015, 32, 126–131. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Li, C. Convolutional neural networks for image-based high-throughput plant phenotyping: A review. Plant Phenomics 2020, 2020, 4152816. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Buzzy, M.; Thesma, V.; Davoodi, M. Real-time plant leaf counting using deep object detection networks. Sensors 2020, 20, 6896. [Google Scholar] [CrossRef] [PubMed]
- Romera-Paredes, B.; Torr, P.H.S. Recurrent Instance Segmentation. In Proceedings of the Computer Vision—ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; pp. 312–329. [Google Scholar]
- Donahue, J.; Hendricks, L.A.; Guadarrama, S. Long-term recurrent convolutional networks for visual recognition and description. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; Volume 39, pp. 677–691. [Google Scholar] [CrossRef]
- Ren, M.; Zemel, R. End-to-End Instance Segmentation with Recurrent Attention. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 293–301. [Google Scholar]
- Aich, S.; Stavness, I. Leaf counting with deep convolutional and deconvolutional networks. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 22–29. [Google Scholar]
- Giuffrida, M.V.; Doerner, P.; Tsaftaris, S.A. Pheno-deep counter: A unified and versatile deep learning architecture for leaf counting. Plant J. 2018, 96, 880–890. [Google Scholar] [CrossRef] [Green Version]
- Kumar, J.P.; Domnic, S. Rosette plant segmentation with leaf count using orthogonal transform and deep convolutional neural network. Mach. Vis. Appl. 2020, 31, 1–14. [Google Scholar]
- Zhou, X.; Wang, D.; Krähenbühl, P. Objects as points. arXiv 2019, arXiv:1904.07850. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S. Microsoft coco: Common objects in context. In Proceedings of the European Conference on Computer vision, Zurich, Switzerland, 5–12 September 2014; pp. 740–755. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Chen, L.-C.; Papandreou, G.; Kokkinos, I. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Zhang, X.; Ren, S. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Li, G.; Xie, H.; Yan, W. Detection of Road Objects With Small Appearance in Images for Autonomous Driving in Various Traffic Situations Using a Deep Learning Based Approach. IEEE Access 2020, 8, 211164–211172. [Google Scholar] [CrossRef]
- Chen, Y.M.; Zhou, D.W. Adaptive attention network for image super-resolution. Acta Autom. Sin. 2020, 46, 1–11. [Google Scholar]
- Lazebnik, S.; Schmid, C.; Ponce, J. Beyond bags of features: Spatial pyramid matching for recognizing natural scene categories. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; pp. 2169–2178. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Lin, T.-Y.; Goyal, P.; Girshick, R. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Ren, S.; He, K.; Girshick, R. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Yuan, W.; Wijewardane, N.K.; Jenkins, S. Early prediction of soybean traits through color and texture features of canopy RGB imagery. Sci. Rep. 2019, 9, 14089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mehta, S.S.; Ton, C.; Asundi, S. Multiple camera fruit localization using a particle filter. Comput. Electron. Agric. 2017, 142, 139–154. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Number of Training Images | Growth Stage | Model Size/M | Detection Time (s) | Precision | Recall | Training Time (h) |
|---|---|---|---|---|---|---|---|
| ExG + SVM | 300 | Early | — | 0.76 | 0.78 | 0.74 | 16 |
| Mask R-CNN | 300 | Early | 251 | 3.13 | 0.85 | 0.80 | 23 |
| Faster R-CNN | 300 | Early | 540 | 3.52 | 0.82 | 0.79 | 21 |
| YOLOv4 | 300 | Early | 250 | 0.46 | 0.92 | 0.86 | 40 |
| Original CenterNet | 300 | Early | 62 | 0.24 | 0.94 | 0.87 | 21 |
| Improved CenterNet | 300 | Early | 83 | 0.29 | 0.96 | 0.90 | 22 |
| ExG + SVM | 300 | Late | — | 0.76 | 0.71 | 0.68 | 16 |
| Mask R-CNN | 300 | Late | 251 | 3.13 | 0.82 | 0.78 | 23 |
| Faster R-CNN | 300 | Late | 540 | 3.52 | 0.8 | 0.76 | 21 |
| YOLOv4 | 300 | Late | 250 | 0.46 | 0.88 | 0.84 | 40 |
| Original CenterNet | 300 | Late | 62 | 0.24 | 0.9 | 0.86 | 21 |
| Improved CenterNet | 300 | Late | 83 | 0.29 | 0.92 | 0.89 | 22 |
| Acquisition Time | Correct Detection Ratio (%) | False Alarm Ratio (%) | Missed Detection Ratio (%) | |||
|---|---|---|---|---|---|---|
| Original CenterNet | Improved CenterNet | Original CenterNet | Improved CenterNet | Original CenterNet | Improved CenterNet | |
| 8:00 | 83.33 | 86.67 | 8.33 | 3.33 | 16.67 | 13.33 |
| 10:00 | 81.67 | 93.33 | 3.33 | 0 | 18.33 | 6.67 |
| 12:00 | 85 | 90 | 6.67 | 6.67 | 15 | 10 |
| 14:00 | 86.67 | 93.33 | 5 | 1.67 | 13.33 | 6.67 |
| 16:00 | 83.33 | 91.67 | 8.33 | 5 | 16.67 | 8.33 |
| 18:00 | 78.33 | 85 | 10 | 6.67 | 21.67 | 15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, S.; Song, Z.; Chen, W.; Qian, T.; Zhang, Y.; Chen, M.; Li, G. Counting Dense Leaves under Natural Environments via an Improved Deep-Learning-Based Object Detection Algorithm. Agriculture 2021, 11, 1003. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11101003
Lu S, Song Z, Chen W, Qian T, Zhang Y, Chen M, Li G. Counting Dense Leaves under Natural Environments via an Improved Deep-Learning-Based Object Detection Algorithm. Agriculture. 2021; 11(10):1003. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11101003
Chicago/Turabian StyleLu, Shenglian, Zhen Song, Wenkang Chen, Tingting Qian, Yingyu Zhang, Ming Chen, and Guo Li. 2021. "Counting Dense Leaves under Natural Environments via an Improved Deep-Learning-Based Object Detection Algorithm" Agriculture 11, no. 10: 1003. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11101003