
Comparison of a Lightweight Experimental Shaker and an Orchard Tractor Mounted Trunk Shaker for Fresh Market Citrus Harvesting


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
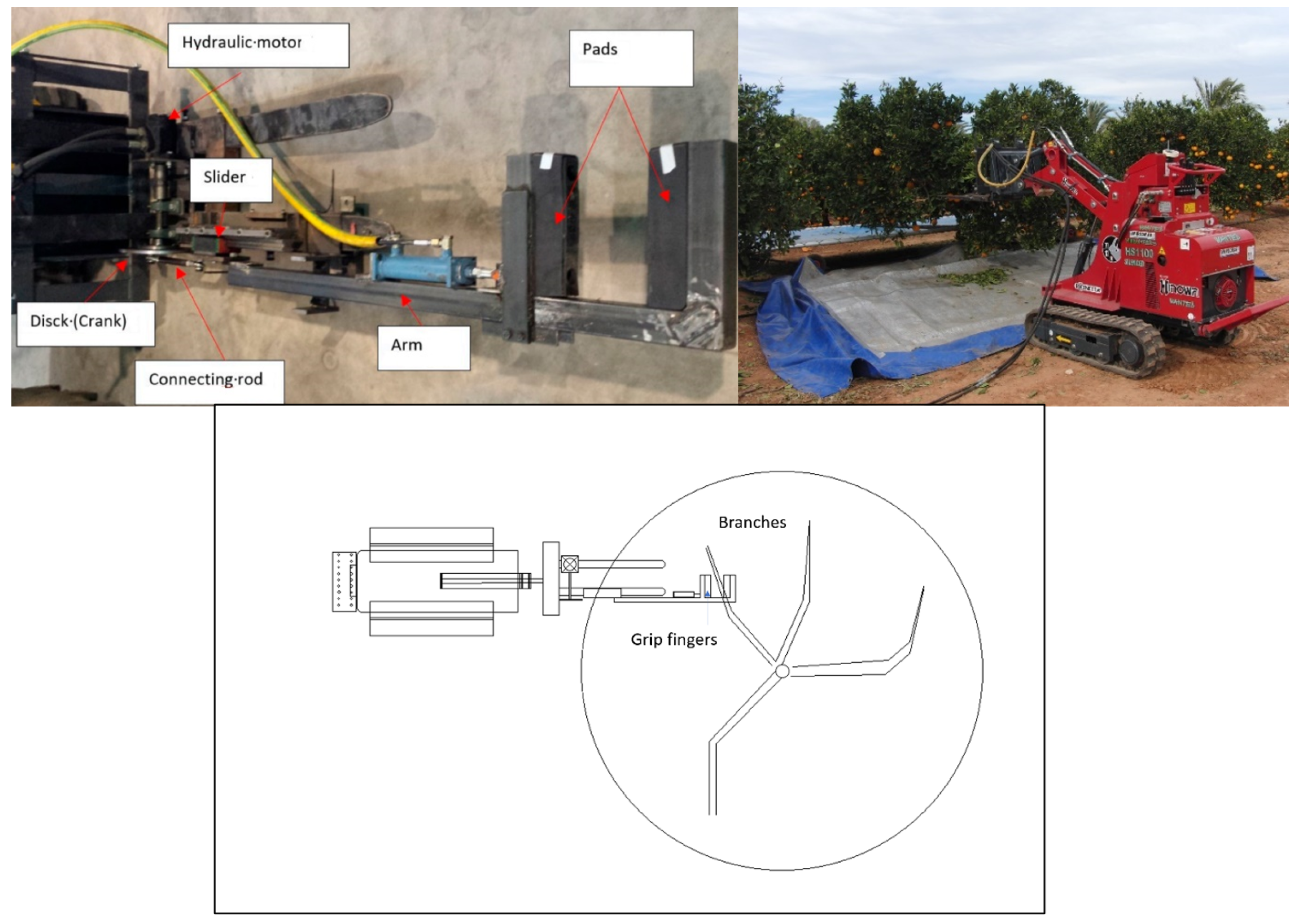
2.2. Harvesting Systems
2.3. Methodology
3. Results
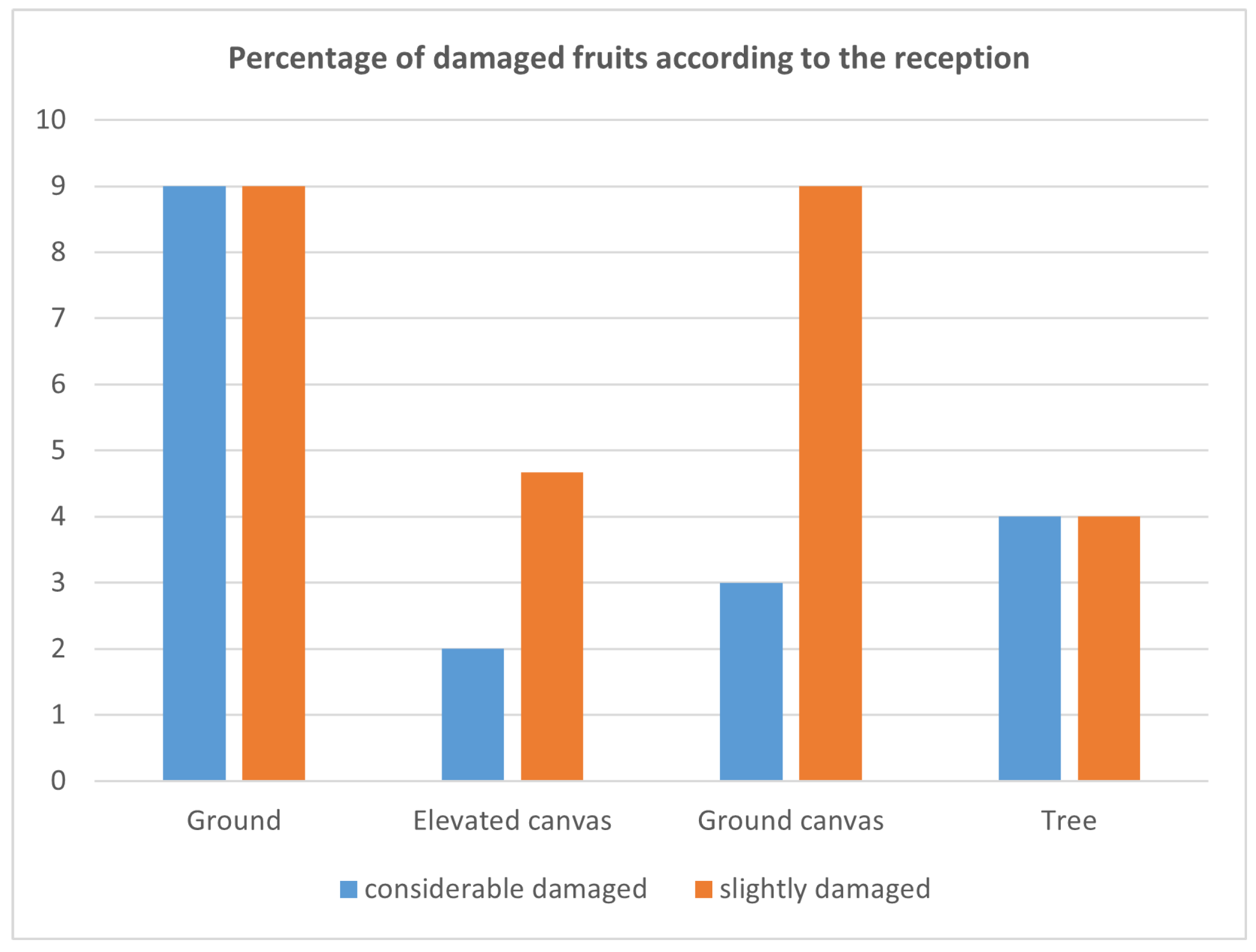
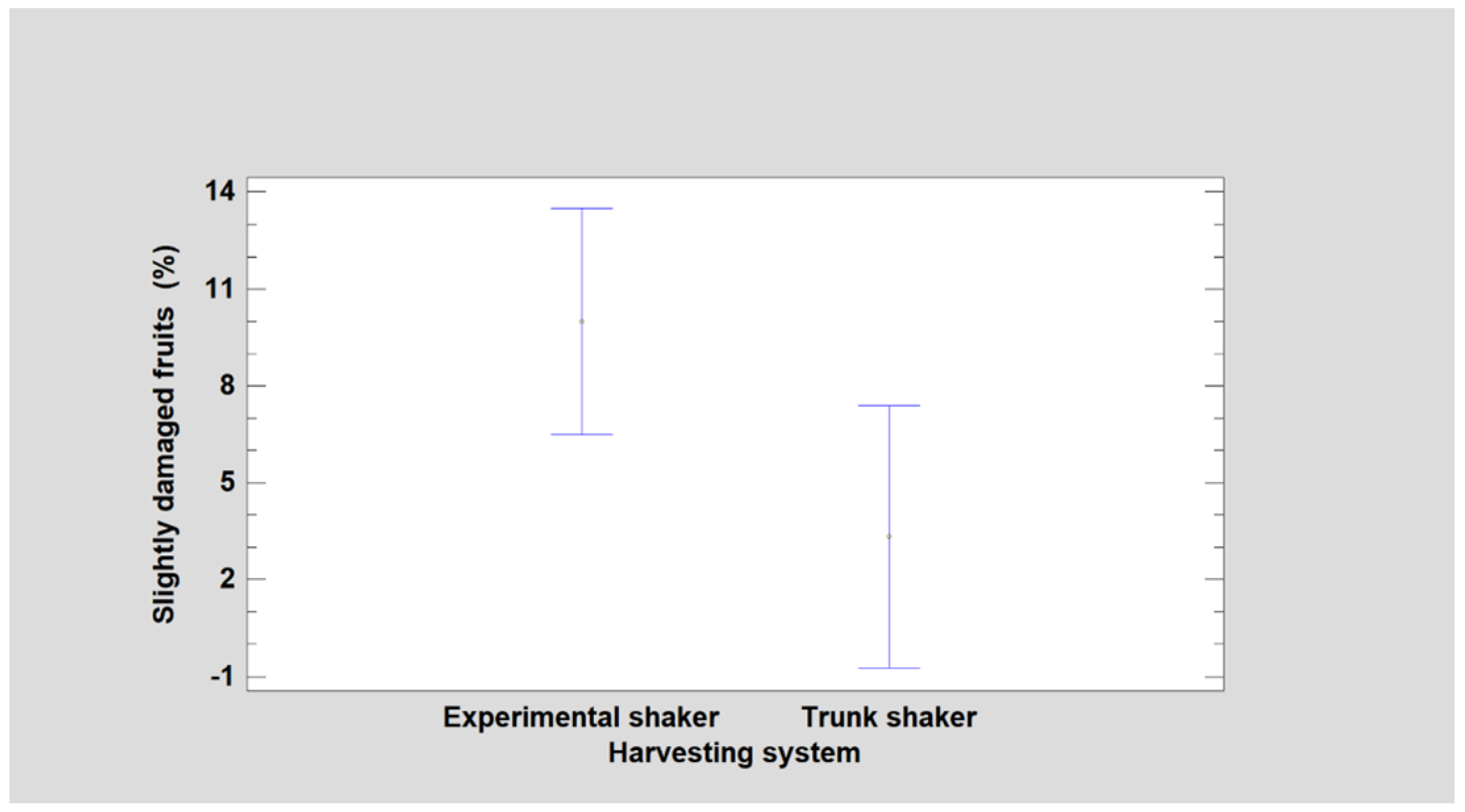
3.1. Fruit Damage
3.2. Detaching Times
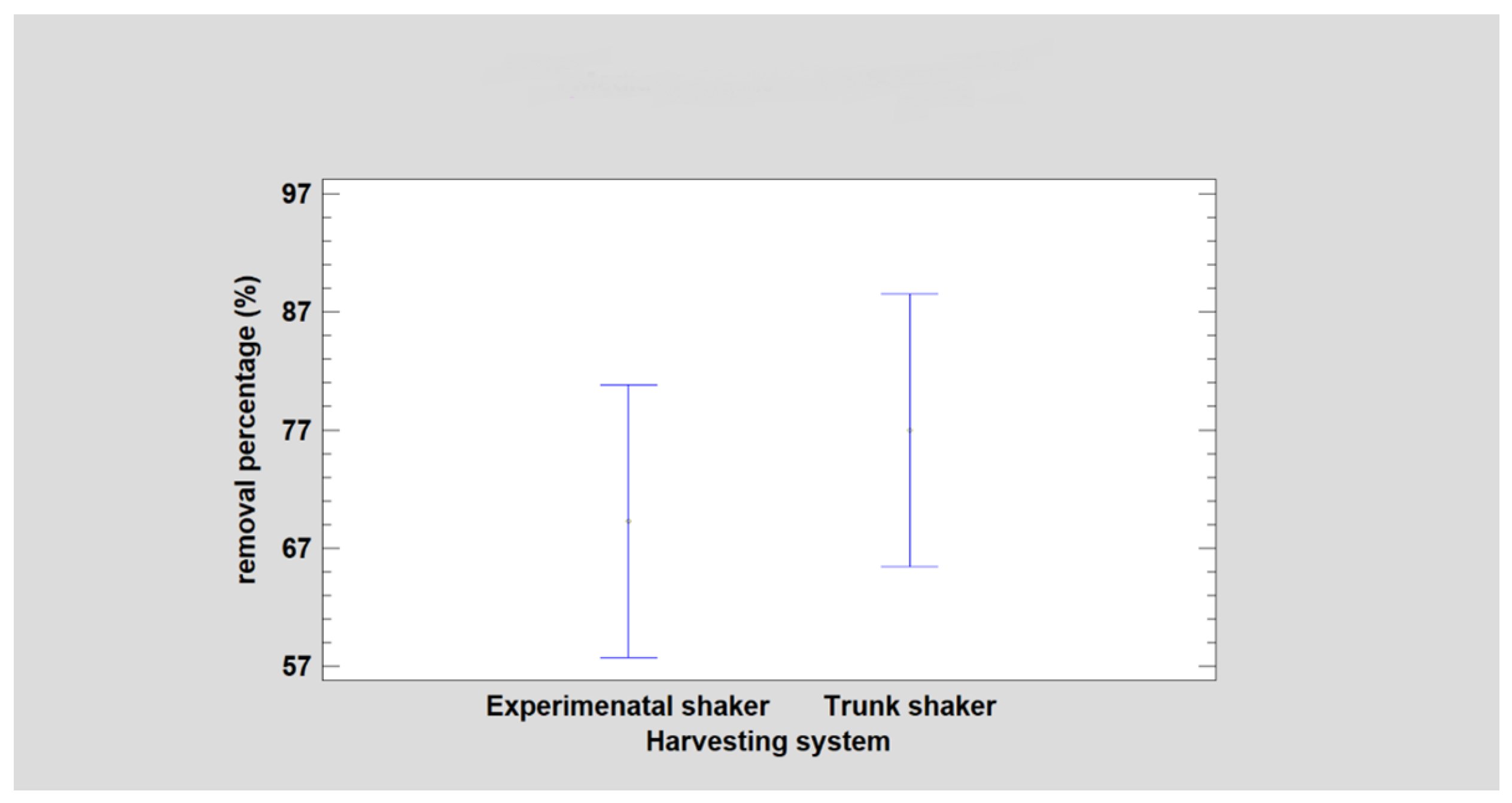
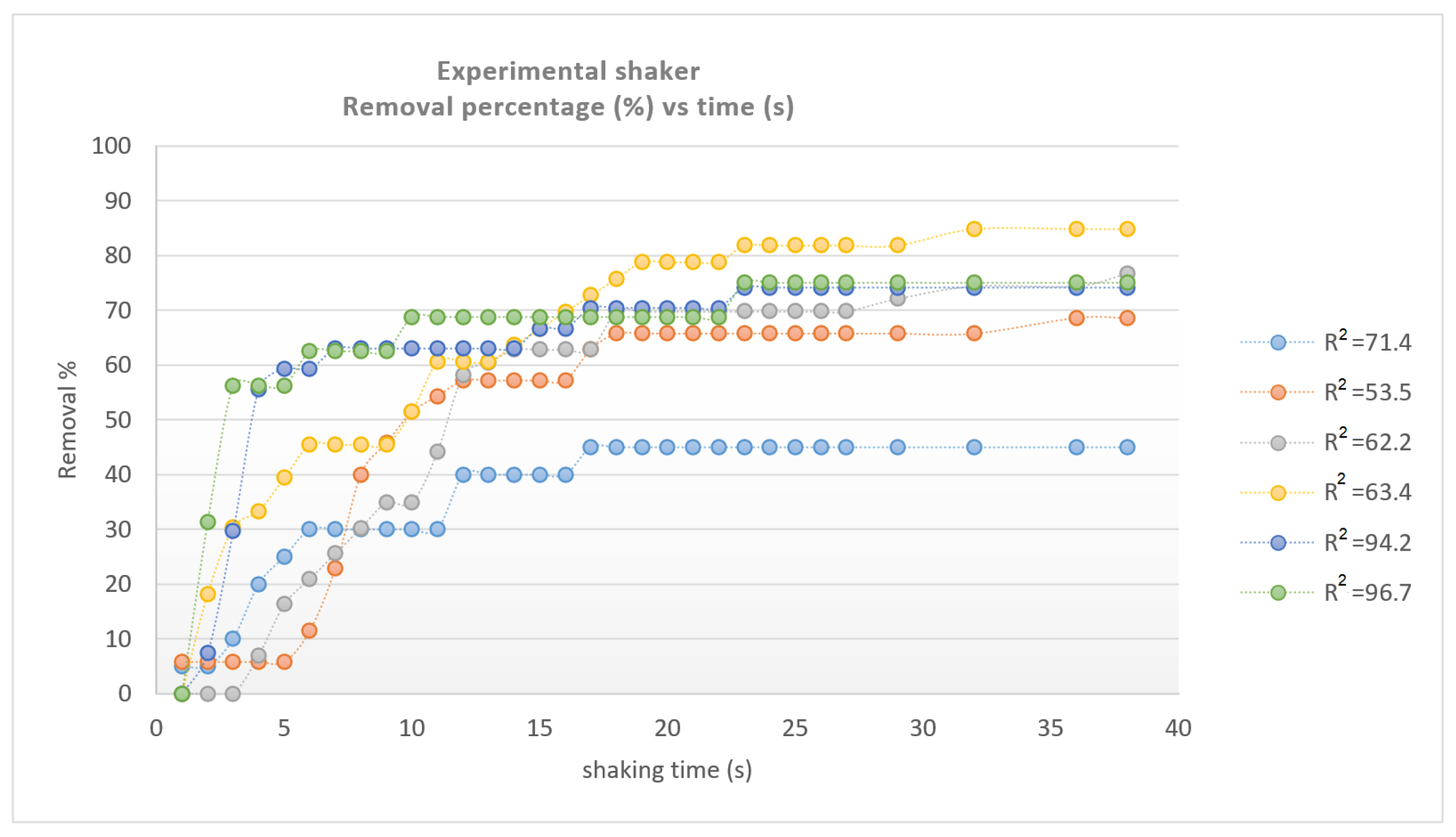
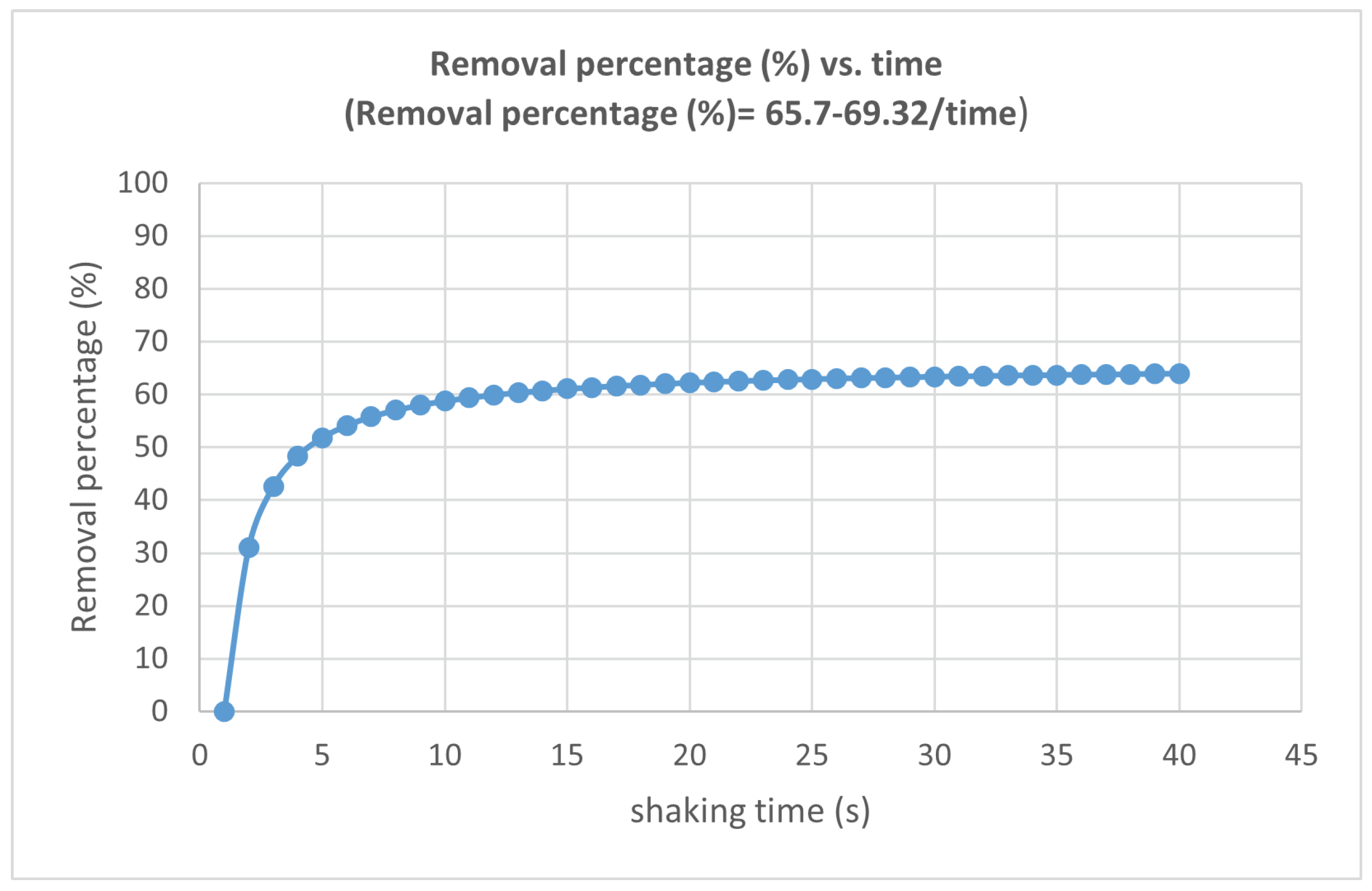
3.3. Removal Percentage
3.4. Branch Removal Percentage According to Time
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Amor, R.B.; de Miguel-Gomez, M.D. Competitiveness of Spanish orange sector in the Mediterranean area. In Proceedings of the ISHS Acta Horticulturae 1292: XXX International Horticultural Congress, IHC2018: International Symposium on Fruit and Vegetables for Processing, International Symposium on Quality and Safety of Horticultural Products and VII International Symposium on Human Health Effects of Fruits and Vegetables, Istanbul, Turkey, 12 August 2018; Volume 1292. [Google Scholar]
- Aslam, H.; Zereyak, E.; Rad, S.T. Modelling of citrus production and export process: Eastern mediterrenean region of turkey. Karadeniz 2020, 148, 169–187. [Google Scholar]
- Santosa, T.H.; Is, M.C.; Prayuginingsih, H. The Improvement of Local Citrus’ Competitiveness to Strengthen the Rural Community Economy. In Proceedings of the Advances in Social Science, Education and Humanities Research, 349, ICCD 2019: 6th International Conference on Community Development, Bandar Seri Begawan, Brunei, 24–25 July 2019; Volume 349. [Google Scholar]
- MAPA. Resultados Técnico-Económicos de Frutales 2018; Subdirección General de Análisis, Coordinación y Estadística, Subsecretaría; Ministerio de Agricultura, Pesca y Alimentación: Madrid, Spain, 2018.
- Cubero, S.; Aleixos, N.; Albert, F.; Torregrosa, A.; Ortiz, C.; García-Navarrete, O.; Blasco, J. Optimised computer vision system for automatic pre-grading of citrus fruit in the field using a mobile platform. Precis. Agric. 2014, 15, 80–94. [Google Scholar] [CrossRef] [Green Version]
- Chhetri, L.B.; Kandel, B.P. Intensive Fruit Cultivation Technology of Citrus Fruits: High Density Planting: A Brief Review. J. Agric. Stud. 2019, 1292, 63–74. [Google Scholar] [CrossRef] [Green Version]
- Da Silva, J.A.; Santos, D.F.L.; Vidal, D.O.; Da Silva, R.P.; Montoro, S.B. Economic viability of a monitoring system in mechanized citrus production. 2020. Competitiveness of Spanish orange sector in the Mediterranean area. Científica 2020, 48, 107–117. [Google Scholar]
- Beltrán-Esteve, M.; Reig-Martínez, E. Comparing conventional and organic citrus grower efficiency in Spain. Agric. Syst. 2014, 129, 115–123. [Google Scholar] [CrossRef]
- Sanders, K.F. Orange harvesting systems review. Biosyst. Eng. 2005, 90, 115–125. [Google Scholar] [CrossRef]
- Torregrosa, A.; Ortí, E.; Martín, B.; Gil, J.; Ortiz, C. Mechanical harvesting of oranges and mandarins in Spain. Biosyst. Eng. 2009, 104, 18–24. [Google Scholar] [CrossRef]
- Vidal, A.; Talens, P.; Prats-Montalbán, J.M.; Cubero, S.; Albert, F.; Blasco, J. In-Line Estimation of the Standard Colour Index of Citrus Fruits Using a Computer Vision System Developed For a Mobile Platform. Food Bioprocess Technol. 2013, 6, 3412–3419. [Google Scholar] [CrossRef]
- González, G.; Chueca, P.; Ortiz, C. Evaluation of a Citrus Mobile Platform Using a Wireless Impact Recording Device. In Proceedings of the European Conference on Agricultural Engineering (AgEng2018), Wageningen, The Netherlands, 8–12 July 2018; pp. 1003–1009. [Google Scholar]
- Ferreira, M.D.; Sanchez, A.C.; Braunbeck, O.A.; Santos, E.A. Harvesting fruits using a mobile platform: A case study applied to citrus. Technical Papers, Agricultural Machinery Management. Eng. Agríc. 2018, 38, 293–299. [Google Scholar] [CrossRef] [Green Version]
- Summer, H.R. Selective harvesting of Valencia oranges with a vertical canopy shaker. Trans. ASAE 1970, 16, 1024–1026. [Google Scholar] [CrossRef]
- Whitney, J.D.; Sumner, H.R.; Hedden, S.L. Folliage shaker for citrus harvesting. Trans. Am. Soc. Agric. Eng. 1975, 18, 70–73. [Google Scholar]
- Maja, J.M.; Ehsani, R. Development of a yield monitoring system for citrus mechanical harvesting machines. Precis. Agric. 2010, 11, 475–487. [Google Scholar] [CrossRef]
- Savary, S.K.J.U.; Ehsani, R.; Schueller, J.K.; Rajaraman, B.P. Simulation study of citrus tree canopy motion during harvesting using a canopy shaker. Trans. ASABE 2010, 53, 1373–1381. [Google Scholar] [CrossRef]
- Shamshiri, R.; Ehsani, R.; Maja, J.M.; Roka, F.M. Determining machine efficiency parameters for a citrus canopy shaker using yield monitor data. Appl. Eng. Agric. 2013, 29, 33–41. [Google Scholar] [CrossRef] [Green Version]
- Arenas-Arenas, F.J.; Castro-García, S.; Blanco-Roldan, G.L.; Salguero, A.; Hervalejo, A.; Merino, C.; Gil-Ribes, J.A. Field evaluation of two canopy shake systems for mechanical harvesting on citrus orchards in Andalusia (Spain). In Proceedings of the ISHS Acta Horticulturae 1065: XII International Citrus Congress—International Society of Citriculture, Valencia, Spain, 20 January 2015; Volume 1065. [Google Scholar]
- Pu, Y.; Toudeshki, A.; Ehsani, R.; Yang, F. Design and evaluation of a two-section canopy shaker with variable frequency for mechanical harvesting of citrus. Int. J. Agric. Biol. Eng. 2018, 11, 77–87. [Google Scholar] [CrossRef] [Green Version]
- Castro-Garcia, S.; Sola-Guirado, R.R.; Gil-Ribes, J.A. Vibration analysis of the fruit detachment process in late-season ‘Valencia’ orange with canopy shaker technology. Biosyst. Eng. 2018, 170, 130–137. [Google Scholar] [CrossRef]
- Savary, S.K.J.U.; Ehsani, R.; Salyani, M.; Hebel, M.A.; Bora, G.C. Study of force distribution in the citrus tree canopy during harvest using a continuous canopy shaker. Comput. Electron. Agric. 2011, 76, 51–58. [Google Scholar] [CrossRef]
- Gupta, S.K.; Ehsani, R.; Kim, N.H. Optimization of a Citrus Canopy Shaker Harvesting System: Mechanistic. Tree Damage and Fruit Detachment Models. Trans. ASABE 2016, 59, 761–776. [Google Scholar]
- Liu, T.H.; Luo, G.; Ehsani, R.; Toudeshki, A.; Zou, X.J.; Wang, H.J. Simulation study on the effects of tine-shaking frequency and penetrating depth on fruit detachment for citrus canopy-shaker harvesting. Comput. Electron. Agric. 2018, 148, 54–62. [Google Scholar] [CrossRef]
- Arenas-Arenas, F.J.; González-Chimeno, A.B.; Romero-Rodríguez, E.; Casado, G.; Bordas, M.; Torrents, J.; Hervalejo, A. Adaptation of two citrus cultivars grafted on forner alcaide Nº 517 to super high-density system and evaluation of mechanized harvesting. Citrus Res. Technol. 2016, 37, 123–131. [Google Scholar] [CrossRef]
- Castro-Garcia, S.; Aragon-Rodriguez, F.; Sola-Guirado, R.R.; Serrano, A.J.; Soria-Olivas, E.; Gil-Ribes, J.A. Vibration Monitoring of the Mechanical Harvesting of Citrus to Improve Fruit Detachment Efficiency. Sensors 2019, 19, 1760. [Google Scholar] [CrossRef] [Green Version]
- Whitney, J.D.; Churchill, D.B.; Hedden, S.L.; Smerage, G.H. Trunk Shakers for Citrus Harvesting—Part I: Measured Trunk Shaker and Tree Trunk Motion. Appl. Eng. Agric. 1988, 4, 93–101. [Google Scholar] [CrossRef]
- Hedden, S.L.; Churchill, D.B.; Whitney, J.D. Trunk Shakers for Citrus Harvesting—Part II: Tree Growth, Fruit Yield and Removal. Appl. Eng. Agric. 1988, 4, 102–106. [Google Scholar] [CrossRef]
- Brown, G.K. Mechanical harvesting systems for the Florida citrus juice industry. In Proceedings of the Appl Paper Number 021108, ASAE Annual Meeting, Chicago, IL, USA, 28–31 July 2002; Volume 021108. [Google Scholar]
- Whitney, J.D.; Hyman, B.R.; Roka, F.M. The past, present and future of citrus mechanical harvesting. In Proceedings of the Appl ISHS Acta Horticulturae 965: I International Symposium on Mechanical Harvesting and Handling Systems of Fruits and Nuts, Lake Alfred, FL, USA, 1–4 April 2012; Volume 965. [Google Scholar]
- Torregrosa, A.; Ortiz, C.; Martin, B.; Moreno, R.; Moltó, E.; Chueca, P. Mechanical harvesting of citrus fruits for fresh market with a trunk shaker and a hand-held petrol shaker. In Proceedings of the Appl ISHS Acta Horticulturae 965: I International Symposium on Mechanical Harvesting and Handling Systems of Fruits and Nuts, Lake Alfred, FL, USA, 1–4 April 2012; Volume 965. [Google Scholar]
- Ortiz, C.; Blasco, J.; Balasch, S.; Torregrosa, A. Shock absorbing surfaces for collecting fruit during the mechanical harvesting of citrus. Biosyst. Eng. 2011, 110, 2–9. [Google Scholar] [CrossRef]
- Ortiz, C.; Torregrosa, A. Determining adequate vibration frequency, amplitude, and time for mechanical harvesting of fresh mandarins. Trans. ASABE 2013, 56, 15–22. [Google Scholar] [CrossRef] [Green Version]
- Spann, T.M.; Danyluk, M.D. Mechanical Harvesting Increases Leaf and Stem Debris in Loads of Mechanically Harvested Citrus Fruit. HortScience 2011, 45, 1287–1300. [Google Scholar] [CrossRef] [Green Version]
- Torregrosa, A.; Albert, F.; Aleixos, N.; Ortiz, C.; Blasco, J. Analysis of the detachment of citrus fruits by vibration using artificial vision. Biosyst. Eng. 2014, 119, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Torregrosa, A.; Molina, J.M.; Pérez, M.; Ortí, E.; Xamani, P.; Ortiz, C. Mechanical Harvesting of Ornamental Citrus Trees in Valencia, Spain. Agronomy 2019, 9, 827. [Google Scholar] [CrossRef] [Green Version]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ortiz, C.; Torregrosa, A.; Castro-García, S. Comparison of a Lightweight Experimental Shaker and an Orchard Tractor Mounted Trunk Shaker for Fresh Market Citrus Harvesting. Agriculture 2021, 11, 1092. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11111092
Ortiz C, Torregrosa A, Castro-García S. Comparison of a Lightweight Experimental Shaker and an Orchard Tractor Mounted Trunk Shaker for Fresh Market Citrus Harvesting. Agriculture. 2021; 11(11):1092. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11111092
Chicago/Turabian StyleOrtiz, Coral, Antonio Torregrosa, and Sergio Castro-García. 2021. "Comparison of a Lightweight Experimental Shaker and an Orchard Tractor Mounted Trunk Shaker for Fresh Market Citrus Harvesting" Agriculture 11, no. 11: 1092. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11111092