An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting



Abstract
:1. Introduction
2. Methodology
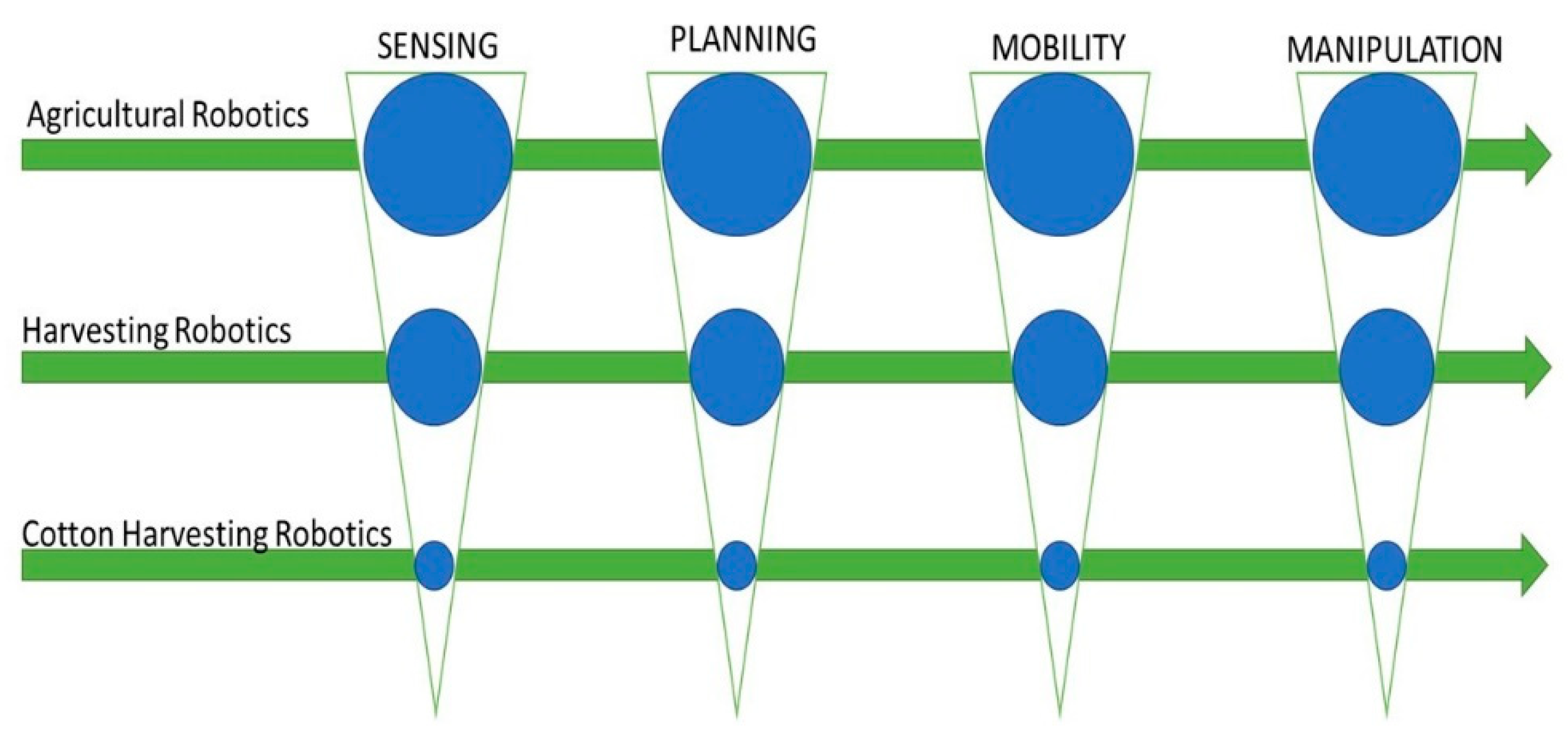
3. Agricultural Robotics
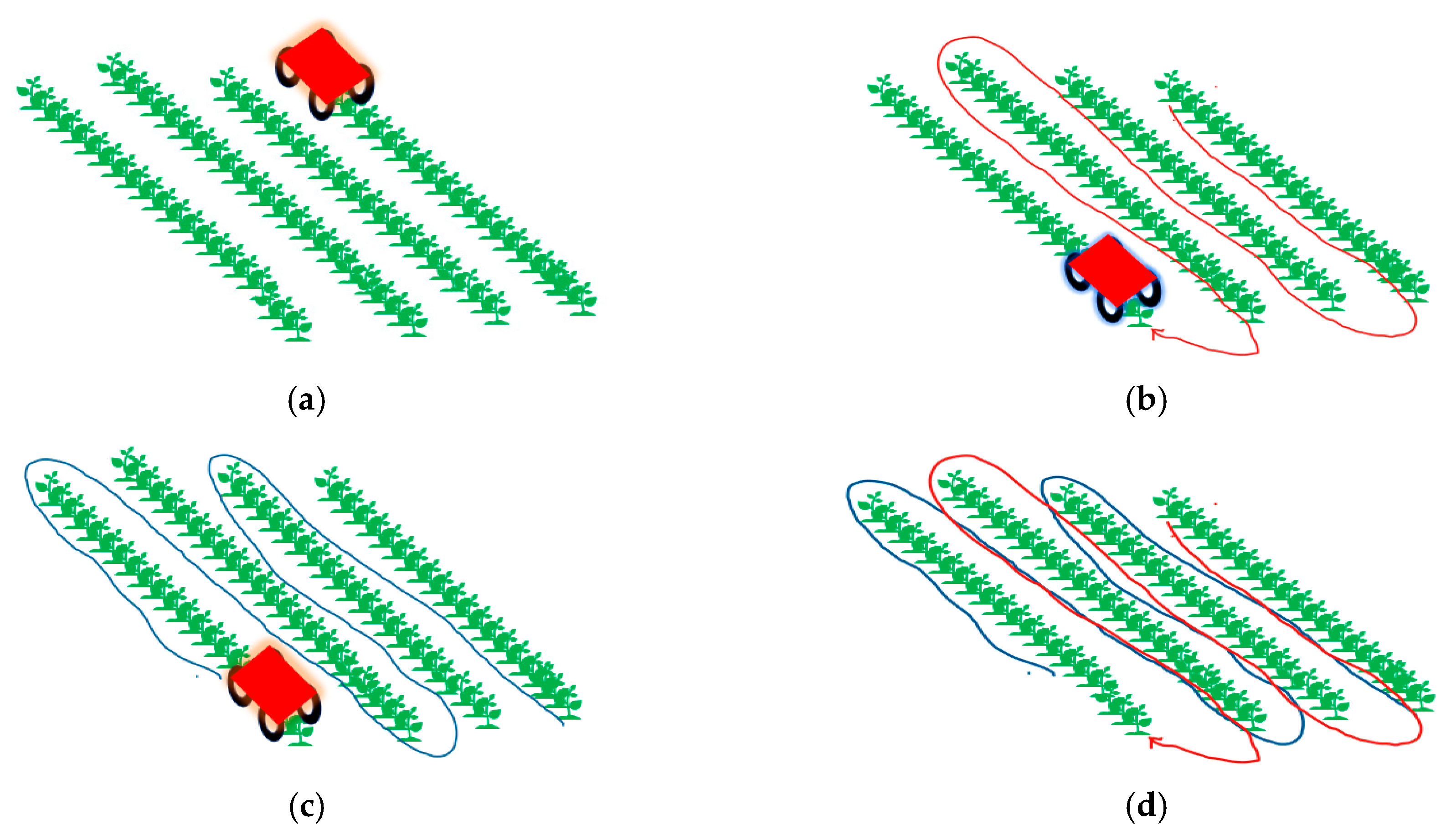
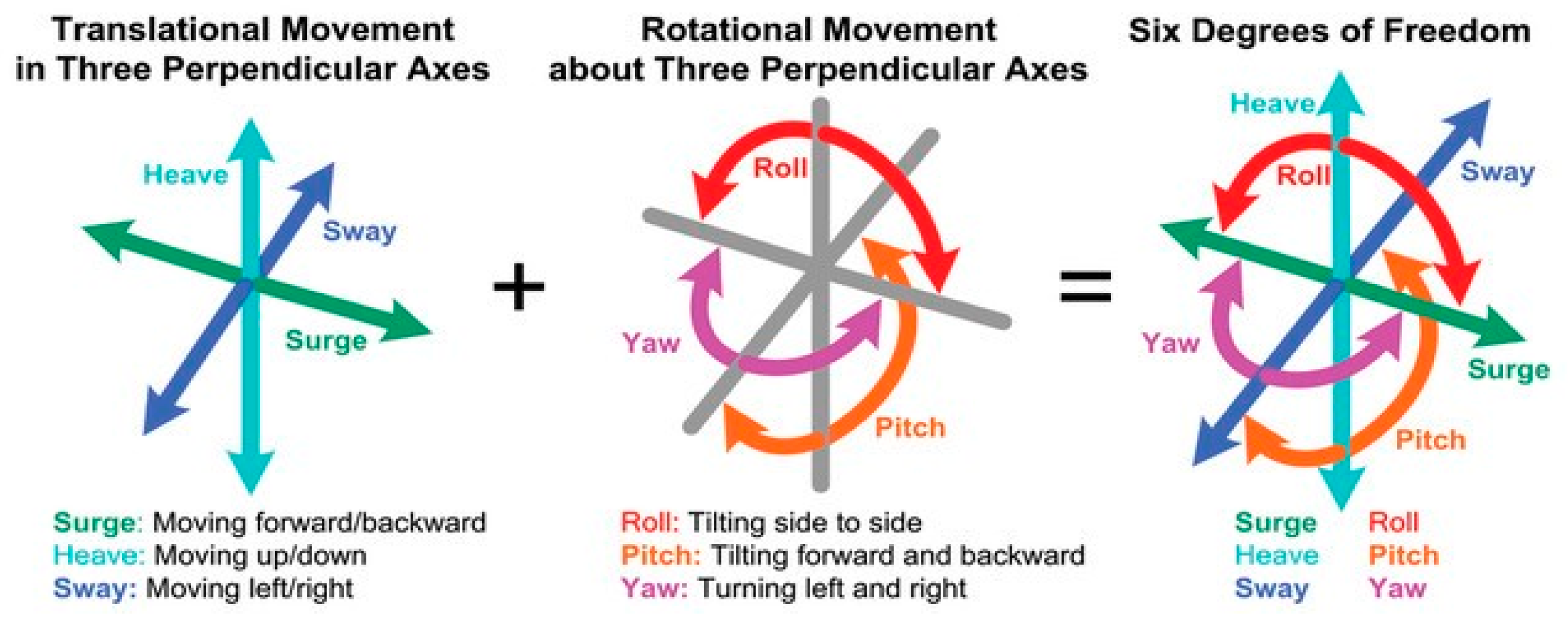
3.1. Agricultural Robot Mobility and Steering
3.2. Agricultural Robot Sensing
3.3. Agricultural Robot Path Planning
3.4. Agricultural Robot Manipulation
4. Agricultural Harvesting Robotics
4.1. Agricultural Harvesting Robot Mobility and Steering
4.2. Agricultural Harvesting Robot Sensing
4.3. Agricultural Harvesting Robot Path Planning
4.4. Agricultural Harvesting Robot Manipulation
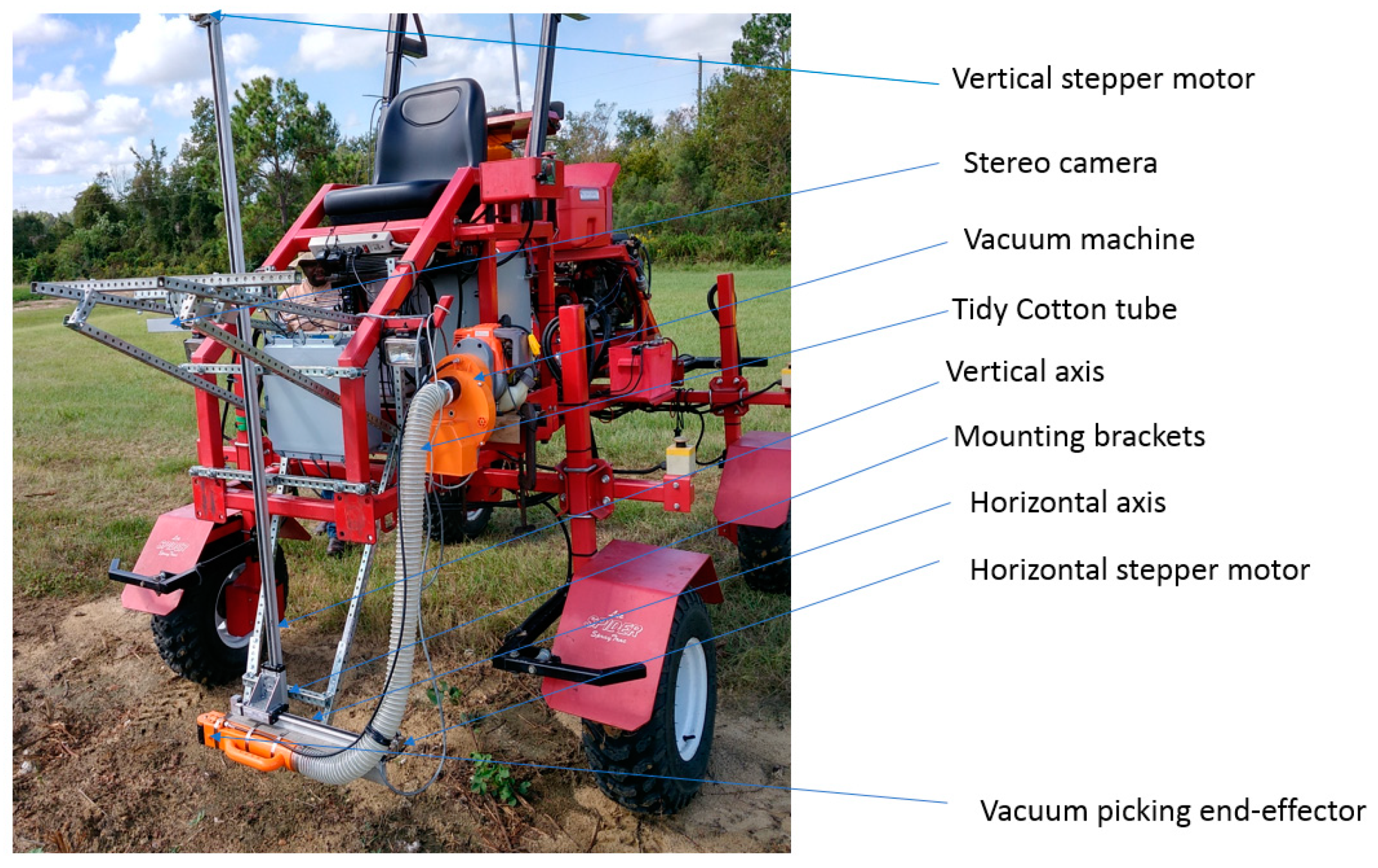
5. Cotton Harvesting Robot
5.1. Cotton Harvesting Robot Mobility and Steering
5.2. Cotton Harvest Robot Sensing
5.3. Cotton Harvest Robot Path Planning
5.4. Cotton Harvest Robot Manipulation
6. Challenges in Commercial Deployment of Agricultural Robots
7. Conclusion and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- USDA/NASS. 2017 State Agriculture Overview for Georgia; USDA/NASS: Washington, DC, USA, 2018.
- Fue, K.G.; Porter, W.M.; Rains, G.C. Real-Time 3D Measurement of Cotton Boll Positions Using Machine Vision Under Field Conditions. In Proceedings of the 2018 Beltwide Cotton Conferences, NCC, San Antonio, TX, USA, 3–5 January 2018; pp. 43–54. [Google Scholar]
- UGA. Georgia Cotton Production Guide. In Ugacotton.Org; UGA Extension Team: Tifton, GA, USA, 2019. [Google Scholar]
- Antille, D.L.; Bennett, J.M.; Jensen, T.A. Soil compaction and controlled traffic considerations in Australian cotton-farming systems. Crop Pasture Sci. 2016, 67, 1–28. [Google Scholar] [CrossRef]
- Boman, R. Estimating Cotton Yield Using Boll Counting. In Cotton.Okstate.Edu; OSU Southwest Research and Extension Center: Altus, OK, USA, 2012. [Google Scholar]
- Prostko, E.; Lemon, R.; Cothren, T. Field Estimation of Cotton Yields. In The Texas A&M University System; College Station: Brazos, TX, USA, 2018; Available online: http://publications.tamu.edu/ (accessed on 8 August 2019).
- Fue, K.G.; Porter, W.M.; Barnes, E.M.; Rains, G.C. Visual Row Detection Using Pixel-Based Algorithm and Stereo Camera for Cotton Picking Robot. In Proceedings of the 2018 Beltwide Cotton Conferences, NCC, New Orleans, LA, USA, 8–10 January 2019. [Google Scholar]
- Bac, C.W.; van Henten, E.J.; Hemming, J.; Edan, Y. Harvesting robots for high-value crops: State-of-the-art review and challenges ahead. J. Field Robot. 2014, 31, 888–911. [Google Scholar] [CrossRef]
- Roldán, J.J.; del Cerro, J.; Garzón-Ramos, D.; Garcia-Aunon, P.; Garzón, M.; de León, J.; Barrientos, A. Robots in agriculture: State of art and practical experiences. Serv. Robot. 2018. [Google Scholar] [CrossRef] [Green Version]
- Lowenberg-DeBoer, J.; Huang, I.Y.; Grigoriadis, V.; Blackmore, S. Economics of robots and automation in field crop production. Precis. Agric. 2019. [Google Scholar] [CrossRef] [Green Version]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations. Part 2: Operations and systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Powers, D.M.W. Evaluation: From precision, recall and F-measure to ROC, informedness, markedness & correlation. J. Mach. Learn. Technol. 2011, 2, 37–63. [Google Scholar]
- Burud, I.; Lange, G.; Lillemo, M.; Bleken, E.; Grimstad, L.; From, P.J. Exploring robots and UAVs as phenotyping tools in plant breeding. IFAC Pap. OnLine 2017, 50, 11479–11484. [Google Scholar] [CrossRef]
- Iida, M.; Kang, D.; Taniwaki, M.; Tanaka, M.; Umeda, M. Localization of CO2 source by a hexapod robot equipped with an anemoscope and a gas sensor. Comput. Electron. Agric. 2008, 63, 73–80. [Google Scholar] [CrossRef]
- Reiser, D.; Sehsah, E.-S.; Bumann, O.; Morhard, J.; Griepentrog, H.W. Development of an Autonomous Electric Robot Implement for Intra-Row Weeding in Vineyards. Agriculture 2019, 9, 18. [Google Scholar] [CrossRef] [Green Version]
- Auat Cheein, F.; Steiner, G.; Paina, G.P.; Carelli, R. Optimized EIF-SLAM algorithm for precision agriculture mapping based on stems detection. Comput. Electron. Agric. 2011, 78, 195–207. [Google Scholar] [CrossRef]
- Ouadah, N.; Ourak, L.; Boudjema, F. Car-Like Mobile Robot Oriented Positioning by Fuzzy Controllers. Int. J. Adv. Robot. Syst. 2008, 5, 25. [Google Scholar] [CrossRef]
- Cheein, F.A.A.; Carelli, R.; Cruz, C.D.l.; Bastos-Filho, T.F. SLAM-based turning strategy in restricted environments for car-like mobile robots. In Proceedings of the 2010 IEEE International Conference on Industrial Technology IEEE, Vina del Mar, Chile, 14–17 March 2010. [Google Scholar]
- Xue, J.; Zhang, L.; Grift, T.E. Variable field-of-view machine vision based row guidance of an agricultural robot. Comput. Electron. Agric. 2012, 84, 85–91. [Google Scholar] [CrossRef]
- Farzan, S.; Hu, A.-P.; Davies, E.; Rogers, J. Modeling and control of brachiating robots traversing flexible cables. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Brisbane, QLD, Australia, 21–25 May 2018. [Google Scholar]
- Davies, E.; Garlow, A.; Farzan, S.; Rogers, J.; Hu, A.-P. Tarzan: Design, Prototyping, and Testing of a Wire-Borne Brachiating Robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) IEEE, Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Grimstad, L.; From, P.J. The Thorvald II agricultural robotic system. Robotics 2017, 6, 24. [Google Scholar] [CrossRef] [Green Version]
- Rahaman, M.M.; Chen, D.; Gillani, Z.; Klukas, C.; Chen, M. Advanced phenotyping and phenotype data analysis for the study of plant growth and development. Front. Plant Sci. 2015, 6, 619. [Google Scholar] [CrossRef] [Green Version]
- Sun, S.; Li, C.; Paterson, H.A. In-Field High-Throughput Phenotyping of Cotton Plant Height Using LiDAR. Remote Sens. 2017, 9, 377. [Google Scholar] [CrossRef] [Green Version]
- Sankaran, S.; Khot, L.R.; Espinoza, C.Z.; Jarolmasjed, S.; Sathuvalli, V.R.; Vandemark, G.J.; Miklas, P.N.; Carter, A.H.; Pumphrey, M.O.; Knowles, N.R.; et al. Low-altitude, high-resolution aerial imaging systems for row and field crop phenotyping: A review. Eur. J. Agron. 2015, 70, 112–123. [Google Scholar] [CrossRef]
- Safren, O.; Alchanatis, V.; Ostrovsky, V.; Levi, O. Detection of Green Apples in Hyperspectral Images of Apple-Tree Foliage Using Machine Vision. Trans. ASABE 2007, 50, 2303–2313. [Google Scholar] [CrossRef]
- Cubero, S.; Aleixos, N.; Moltó, E.; Gómez-Sanchis, J.; Blasco, J. Advances in Machine Vision Applications for Automatic Inspection and Quality Evaluation of Fruits and Vegetables. Food Bioprocess Technol. 2011, 4, 487–504. [Google Scholar] [CrossRef]
- Deery, D.; Jimenez-Berni, J.; Jones, H.; Sirault, X.; Furbank, R. Proximal Remote Sensing Buggies and Potential Applications for Field-Based Phenotyping. Agronomy 2014, 4, 349–379. [Google Scholar] [CrossRef] [Green Version]
- Dong, J.; Burnham, J.G.; Boots, B.; Rains, G.; Dellaert, F. 4D crop monitoring: Spatio-temporal reconstruction for agriculture. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Bak, T.; Jakobsen, H. Agricultural robotic platform with four wheel steering for weed detection. Biosyst. Eng. 2004, 87, 125–136. [Google Scholar] [CrossRef]
- Mousazadeh, H. A technical review on navigation systems of agricultural autonomous off-road vehicles. J. Terramechanics 2013, 50, 211–232. [Google Scholar] [CrossRef]
- Kim, G.; Kim, S.; Hong, Y.; Han, K.; Lee, S. A robot platform for unmanned weeding in a paddy field using sensor fusion. In Proceedings of the 2012 IEEE International Conference on Automation Science and Engineering (CASE) IEEE, Seoul, Korea, 20–24 August 2012. [Google Scholar]
- Sengupta, S.; Lee, W.S. Identification and determination of the number of immature green citrus fruit in a canopy under different ambient light conditions. Biosyst. Eng. 2014, 117, 51–61. [Google Scholar] [CrossRef]
- Wang, C.; Lee, W.S.; Zou, X.; Choi, D.; Gan, H.; Diamond, J. Detection and counting of immature green citrus fruit based on the Local Binary Patterns (LBP) feature using illumination-normalized images. Precis. Agric. 2018, 19, 1062–1083. [Google Scholar] [CrossRef]
- Moghimi, A.; Aghkhani, M.H.; Golzarian, M.R.; Rohani, A.; Yang, C. A Robo-vision Algorithm for Automatic Harvesting of Green Bell Pepper. In Proceedings of the 2015 ASABE Annual International Meeting ASABE, St. Joseph, MI, USA, 26–29 July 2015; p. 1. [Google Scholar]
- Qureshi, W.; Payne, A.; Walsh, K.; Linker, R.; Cohen, O.; Dailey, M. Machine vision for counting fruit on mango tree canopies. Precis. Agric. 2017, 18, 224–244. [Google Scholar] [CrossRef]
- Choi, D.; Lee, W.S.; Schueller, J.K.; Ehsani, R.; Roka, F.; Diamond, J. A performance comparison of RGB, NIR, and depth images in immature citrus detection using deep learning algorithms for yield prediction. In Proceedings of the 2017 ASABE Annual International Meeting ASABE, St. Joseph, MI, USA, 16–19 July 2017; p. 1. [Google Scholar]
- Hannan, M.W.; Burks, T.F.; Bulanon, D.M. A Real-time Machine Vision Algorithm for Robotic Citrus Harvesting. In Proceedings of the 2007 ASAE Annual Meeting, ASABE, St. Joseph, MI, USA, 17–20 June 2007. [Google Scholar]
- Tao, Y.; Heinemann, P.H.; Varghese, Z.; Morrow, C.T.; Sommer, H.J., III. Machine Vision for Color Inspection of Potatoes and Apples. Trans. ASAE 1995, 38, 1555–1561. [Google Scholar] [CrossRef]
- Chang, Y.; Zaman, Q.; Schumann, A.; Percival, D.; Esau, T.; Ayalew, G. Development of color co-occurrence matrix based machine vision algorithms for wild blueberry fields. Appl. Eng. Agric. 2012, 28, 315–323. [Google Scholar] [CrossRef]
- Bergerman, M.; Billingsley, J.; Reid, J.; van Henten, E. Robotics in Agriculture and Forestry. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Cham, Switzerland, 2016; pp. 1065–1077. [Google Scholar]
- Wang, N.; Zhang, N.; Wang, M. Wireless sensors in agriculture and food industry—Recent development and future perspective. Comput. Electron. Agric. 2006, 50, 1–14. [Google Scholar] [CrossRef]
- Jaulin, L. Path planning using intervals and graphs. Reliab. Comput. 2001, 7, 1–159. [Google Scholar] [CrossRef]
- Jensen, M.A.F.; Bochtis, D.; Sørensen, C.G.; Blas, M.R.; Lykkegaard, K.L.J.C.; Engineering, I. In-field and inter-field path planning for agricultural transport units. Comput. Ind. Eng. 2012, 63, 1054–1061. [Google Scholar] [CrossRef]
- Grötschel, M.; Lovász, L.; Schrijver, A. Geometric Algorithms and Combinatorial Optimization; Springer Science & Business Media: Berlin, Germany, 2012; Volume 2. [Google Scholar]
- Zeng, J.; Ju, R.; Qin, L.; Hu, Y.; Yin, Q.; Hu, C. Navigation in Unknown Dynamic Environments Based on Deep Reinforcement Learning. Sensors 2019, 19, 3837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qixin, C.; Yanwen, H.; Jingliang, Z. An evolutionary artificial potential field algorithm for dynamic path planning of mobile robot. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, Beijing, China, 9–15 October 2006. [Google Scholar]
- Shvalb, N.; Moshe, B.B.; Medina, O. A real-time motion planning algorithm for a hyper-redundant set of mechanisms. Robotica 2013, 31, 1327–1335. [Google Scholar] [CrossRef] [Green Version]
- Subramanian, V.; Burks, T.F.; Arroyo, A.A. Development of machine vision and laser radar based autonomous vehicle guidance systems for citrus grove navigation. Comput. Electron. Agric. 2006, 53, 130–143. [Google Scholar] [CrossRef]
- ASABE. Coming soon to an orchard near you: The Global Unmanned Spray System (GUSS). In Resource Magazine; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2019; pp. 9–10. [Google Scholar]
- Cao, P.M.; Hall, E.L.; Zhang, E. Soil sampling sensor system on a mobile robot. In Intelligent Robots and Computer Vision XXI: Algorithms, Techniques, and Active Vision; International Society for Optics and Photonics: Providence, RI, USA, 2003. [Google Scholar]
- Monta, M.; Kondo, N.; Ting, K.C. End-Effectors for Tomato Harvesting Robot. In Artificial Intelligence for Biology and Agriculture; Panigrahi, S., Ting, K.C., Eds.; Springer: Dordrecht, The Netherlands, 1998; pp. 1–25. [Google Scholar]
- Tai, K.; El-Sayed, A.-R.; Shahriari, M.; Biglarbegian, M.; Mahmud, S. State of the Art Robotic Grippers and Applications. Robotics 2016, 5, 11. [Google Scholar] [CrossRef] [Green Version]
- Monkman, G.J. Robot Grippers for Use with Fibrous Materials. Int. J. Robot. Res. 1995, 14, 144–151. [Google Scholar] [CrossRef]
- Rodríguez, F.; Moreno, J.C.; Sánchez, J.A.; Berenguel, M. Grasping in Agriculture: State-of-the-Art and Main Characteristics. In Grasping in Robotics; Carbone, G., Ed.; Springer: London, UK, 2013; pp. 385–409. [Google Scholar]
- Paul, R.P. Robot Manipulators: Mathematics, Programming, and Control: The Computer Control of Robot Manipulators; The MIT Press: Cambridge, MA, USA; London, UK, 1981. [Google Scholar]
- Cho, S.I.; Chang, S.J.; Kim, Y.Y.; An, K.J. AE—Automation and Emerging Technologies. Biosyst. Eng. 2002, 82, 143–149. [Google Scholar] [CrossRef]
- Kondo, N.; Ting, K.C. Robotics for Plant Production. Artif. Intell. Rev. 1998, 12, 227–243. [Google Scholar] [CrossRef]
- Bakker, T.; Bontsema, J.; Müller, J. Systematic design of an autonomous platform for robotic weeding. J. Terramechanics 2010, 47, 63–73. [Google Scholar] [CrossRef]
- Bakker, T.; van Asselt, K.; Bontsema, J.; Müller, J.; van Straten, G. An Autonomous Weeding Robot for Organic Farming. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Haruhisa, K.; Suguru, M.; Hideki, K.; Satoshi, U. Novel Climbing Method of Pruning Robot. In Proceedings of the 2008 SICE Annual Conference, IEEE, Tokyo, Japan, 20–22 August 2008. [Google Scholar]
- Devang, P.S.; Gokul, N.A.; Ranjana, M.; Swaminathan, S.; Binoy, B.N. Autonomous arecanut tree climbing and pruning robot. In Proceedings of the 2010 International Conference on Emerging Trends in Robotics and Communication Technologies, WikiCFP, Chennai, India, 3–5 December 2010. [Google Scholar]
- Botterill, T.; Paulin, S.; Green, R.; Williams, S.; Lin, J.; Saxton, V.; Mills, S.; Chen, X.; Corbett-Davies, S. A Robot System for Pruning Grape Vines. J. Field Robot. 2017, 34, 1100–1122. [Google Scholar] [CrossRef]
- Ueki, S.; Kawasaki, H.; Ishigure, Y.; Koganemaru, K.; Mori, Y. Development and experimental study of a novel pruning robot. Artif. Life Robot. 2011, 16, 86–89. [Google Scholar] [CrossRef]
- Fentanes, J.P.; Gould, I.; Duckett, T.; Pearson, S.; Cielniak, G. 3-D Soil Compaction Mapping Through Kriging-Based Exploration With a Mobile Robot. IEEE Robot. Autom. Lett. 2018, 3, 3066–3072. [Google Scholar] [CrossRef]
- Scholz, C.; Moeller, K.; Ruckelshausen, A.; Hinck, S.; Goettinger, M. Automatic soil penetrometer measurements and GIS based documentation with the autonomous field robot platform bonirob. In Proceedings of the 12th International Conference of Precision Agriculture, Sacramento, CA, USA, 20–23 July 2014. [Google Scholar]
- Kicherer, A.; Herzog, K.; Pflanz, M.; Wieland, M.; Rüger, P.; Kecke, S.; Kuhlmann, H.; Töpfer, R. An Automated Field Phenotyping Pipeline for Application in Grapevine Research. Sensors 2015, 15, 4823–4836. [Google Scholar] [CrossRef] [PubMed]
- Salas Fernandez, M.G.; Bao, Y.; Tang, L.; Schnable, P.S. A High-Throughput, Field-Based Phenotyping Technology for Tall Biomass Crops. Plant Physiol. 2017, 174, 2008–2022. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Obregón, D.; Arnau, R.; Campo-Cossio, M.; Arroyo-Parras, J.G.; Pattinson, M.; Tiwari, S.; Lluvia, I.; Rey, O.; Verschoore, J.; Lenza, L.; et al. Precise Positioning and Heading for Autonomous Scouting Robots in a Harsh Environment. In From Bioinspired Systems and Biomedical Applications to Machine Learning; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar]
- Young, S.N.; Kayacan, E.; Peschel, J.M. Design and field evaluation of a ground robot for high-throughput phenotyping of energy sorghum. Precis. Agric. 2018, 20, 697–722. [Google Scholar] [CrossRef] [Green Version]
- Sammons, P.J.; Furukawa, T.; Bulgin, A. Autonomous pesticide spraying robot for use in a greenhouse. In Proceedings of the 2005 Australasian Conference on Robotics and Automation, ARAA, Sydney, Australia, 5–7 December 2005. [Google Scholar]
- Sharma, S.; Borse, R. Automatic Agriculture Spraying Robot with Smart Decision Making. In Intelligent Systems Technologies and Applications 2016; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Nakao, N.; Suzuki, H.; Kitajima, T.; Kuwahara, A.; Yasuno, T. Path planning and traveling control for pesticide-spraying robot in greenhouse. J. Signal Process. 2017, 21, 175–178. [Google Scholar]
- Cantelli, L.; Bonaccorso, F.; Longo, D.; Melita, C.D.; Schillaci, G.; Muscato, G. A Small Versatile Electrical Robot for Autonomous Spraying in Agriculture. AgriEngineering 2019, 1, 391–402. [Google Scholar] [CrossRef] [Green Version]
- Haibo, L.; Shuliang, D.; Zunmin, L.; Chuijie, Y. Study and Experiment on a Wheat Precision Seeding Robot. J. Robot. 2015, 2015, 1–9. [Google Scholar] [CrossRef]
- Srinivasan, N.; Prabhu, P.; Smruthi, S.S.; Sivaraman, N.V.; Gladwin, S.J.; Rajavel, R.; Natarajan, A.R. Design of an autonomous seed planting robot. In Proceedings of the 2016 IEEE Region 10 Humanitarian Technology Conference (R10-HTC), Agra, India, 21–23 December 2016. [Google Scholar]
- Bac, C.W.; Hemming, J.; van Tuijl, B.A.J.; Barth, R.; Wais, E.; van Henten, E.J. Performance Evaluation of a Harvesting Robot for Sweet Pepper. J. Field Robot. 2017, 34, 1123–1139. [Google Scholar] [CrossRef]
- Feng, Q.; Zou, W.; Fan, P.; Zhang, C.; Wang, X. Design and test of robotic harvesting system for cherry tomato. Int. J. Agric. Biol. Eng. 2018, 11, 96–100. [Google Scholar] [CrossRef]
- Kohan, A.; Borghaee, A.M.; Yazdi, M.; Minaei, S.; Sheykhdavudi, M.J. Robotic harvesting of rosa damascena using stereoscopic machine vision. World Appl. Sci. J. 2011, 12, 231–237. [Google Scholar]
- Hohimer, C.J.; Wang, H.; Bhusal, S.; Miller, J.; Mo, C.; Karkee, M. Design and Field Evaluation of a Robotic Apple Harvesting System with a 3D-Printed Soft-Robotic End-Effector. Trans. ASABE 2019, 62, 405–414. [Google Scholar] [CrossRef]
- Faverjon, B.; Tournassoud, P. A local based approach for path planning of manipulators with a high number of degrees of freedom. In Proceedings of the 1987 IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 31 March–3 April 1987. [Google Scholar]
- Zion, B.; Mann, M.; Levin, D.; Shilo, A.; Rubinstein, D.; Shmulevich, I. Harvest-order planning for a multiarm robotic harvester. Comput. Electron. Agric. 2014, 103, 75–81. [Google Scholar] [CrossRef]
- Lili, W.; Bo, Z.; Jinwei, F.; Xiaoan, H.; Shu, W.; Yashuo, L.; Zhou, Q.; Chongfeng, W. Development of a tomato harvesting robot used in greenhouse. Int. J. Agric. Biol. Eng. 2017, 10, 140–149. [Google Scholar] [CrossRef]
- Noguchi, N.; Terao, H. Path planning of an agricultural mobile robot by neural network and genetic algorithm. Comput. Electron. Agric. 1997, 18, 187–204. [Google Scholar] [CrossRef]
- Zuo, G.; Zhang, P.; Qiao, J. Path planning algorithm based on sub-region for agricultural robot. In Proceedings of the 2nd International Asia Conference on Informatics in Control, Automation and Robotics, Wuhan, China, 6–7 March 2010. [Google Scholar]
- Hayashi, S.; Yamamoto, S.; Saito, S.; Ochiai, Y.; Kamata, J.; Kurita, M.; Yamamoto, K. Field operation of a movable strawberry-harvesting robot using a travel platform. Jpn. Agric. Res. Q. JARQ 2014, 48, 307–316. [Google Scholar] [CrossRef] [Green Version]
- Xiong, Y.; Peng, C.; Grimstad, L.; From, P.J.; Isler, V. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper. Comput. Electron. Agric. 2019, 157, 392–402. [Google Scholar] [CrossRef]
- Yaguchi, H.; Nagahama, K.; Hasegawa, T.; Inaba, M. Development of an autonomous tomato harvesting robot with rotational plucking gripper. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Silwal, A.; Davidson, J.R.; Karkee, M.; Mo, C.; Zhang, Q.; Lewis, K. Design, integration, and field evaluation of a robotic apple harvester. J. Field Robot. 2017, 34, 1140–1159. [Google Scholar] [CrossRef]
- Mu, L.; Liu, Y.; Cui, Y.; Liu, H.; Chen, L.; Fu, L.; Gejima, Y. Design of End-effector for Kiwifruit Harvesting Robot Experiment. In Proceedings of the 2017 ASABE Annual International Meeting, ASABE, St. Joseph, MI, USA, 16–19 July 2017; p. 1. [Google Scholar]
- Feng, Q.; Wang, X.; Wang, G.; Li, Z. Design and test of tomatoes harvesting robot. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015. [Google Scholar]
- Chen, W.; Xu, T.; Liu, J.; Wang, M.; Zhao, D. Picking Robot Visual Servo Control Based on Modified Fuzzy Neural Network Sliding Mode Algorithms. Electronics 2019, 8, 605. [Google Scholar] [CrossRef] [Green Version]
- Yuanshen, Z.; Gong, L.; Liu, C.; Huang, Y. Dual-arm robot design and testing for harvesting tomato in greenhouse. IFAC Pap. Online 2016, 49, 161–165. [Google Scholar]
- Ritchie, G.L.; Bednarz, C.W.; Jost, P.H.; Brown, S.M. Cotton Growth and Development; University of Georgia: Athens, GA, USA, 2007. [Google Scholar]
- Rains, G.C.; Faircloth, A.G.; Thai, C.; Raper, R.L. Evaluation of a simple pure pursuit path-following algorithm for an autonomous, articulated-steer vehicle. Appl. Eng. Agric. 2014, 30, 367–374. [Google Scholar]
- Fue, K.G.; Porter, W.M.; Barnes, E.M.; Rains, G.C. Visual Inverse Kinematics for Cotton Picking Robot. In Proceedings of the 2019 Beltwide Cotton Conferences, NCC, New Orleans, LA, USA, 8–10 January 2019; pp. 730–742. [Google Scholar]
- Mulan, W.; Jieding, W.; Jianning, Y.; Kaiyun, X. A research for intelligent cotton picking robot based on machine vision. In Proceedings of the 2008 International Conference on Information and Automation IEEE, Changsha, China, 20–23 June 2008. [Google Scholar]
- Wang, Y.; Zhu, X.; Ji, C. Machine Vision Based Cotton Recognition for Cotton Harvesting Robot. In Computer and Computing Technologies in Agriculture; Springer: Boston, MA, USA, 2008; Volume II. [Google Scholar]
- Li, Y.; Cao, Z.; Lu, H.; Xiao, Y.; Zhu, Y.; Cremers, A.B. In-field cotton detection via region-based semantic image segmentation. Comput. Electron. Agric. 2016, 127, 475–486. [Google Scholar] [CrossRef]
- Fue, K.G.; Porter, W.M.; Rains, G.C. Deep Learning based Real-time GPU-accelerated Tracking and Counting of Cotton Bolls under Field Conditions using a Moving Camera. In Proceedings of the 2018 ASABE Annual International Meeting, ASABE, St. Joseph, MI, USA, 29 July–1 August 2018; p. 1. [Google Scholar]
- Ramin Shamshiri, R.; Weltzien, C.; Hameed, I.A.; Yule, I.J.; Grift, T.E.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–11. [Google Scholar] [CrossRef]
- Higuti, V.A.H.; Velasquez, A.E.B.; Magalhaes, D.V.; Becker, M.; Chowdhary, G. Under canopy light detection and ranging-based autonomous navigation. J. Field Robot. 2019, 36, 547–567. [Google Scholar] [CrossRef]
- Shockley, J.M.; Dillon, C.R. An economic feasibility assessment for adoption of autonomous field machinery in row crop production. In Proceedings of the 2018 International Conference on Precision Agriculture ICPA, Montreal, QC, Canada, 24–27 June 2018. [Google Scholar]
- Pedersen, S.M.; Fountas, S.; Blackmore, S. Agricultural robots—Applications and economic perspectives. In Service Robot Applications; IntechOpen: London, UK, 2008. [Google Scholar]
- Gaus, C.C.; Urso, L.-M.; Minßen, T.-F.; de Witte, T. Economics of mechanical weeding by a swarm of small field robots. In Proceedings of the 57th Annual Conference of German Association of Agricultural Economists (GEWISOLA), Weihenstephan, Germany, 13–15 September 2017. [Google Scholar]
- Koubâa, A. Studies in Computational Intelligence. In Robot Operating System (ROS), 1st ed.; Springer: Berlin, Germany, 2017; p. 655. [Google Scholar]
- Ghaffarzadeh, K. Agricultural Robots and Drones 2018–2038: Technologies, Markets and Players; IDTechEx Research: Berlin, Germany, 2019. [Google Scholar]
- Kamilaris, A.; Prenafeta-Boldú, F. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef] [Green Version]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Liakos, G.K.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine Learning in Agriculture: A Review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [PubMed] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Conventional Machine | Robot |
|---|---|---|
| Number of bolls per acre | 303,178 | 303,178 |
| Times to harvest per acre (pass) | 1 | 25 |
| Time to harvest an acre(hours) | 0.1 | 250 |
| Unit Cost | $725,000 | $7000 |
| Measure | Description |
|---|---|
| CT: Cycle Time (s) | The average time required to finish a specific action in a task. (e.g., harvesting a cotton boll, spraying herbicides, scouting with camera) |
| OT: Operation Time under real-time conditions (s) | The average time required to finish an intended task under real-time in an agricultural field. This can be time taken from the start of robot planning, navigation, sensing, and manipulation. |
| OV: Operation Velocity under real-time conditions (inch s-1) | Average velocity taken by the robot to finish a mission (navigation can be very complex or simple depending on-farm management task) |
| PR: Production Rate (lbs h-1, ac h-1, number of actions h-1, etc.) | Amount of successful actions or task (e.g., number of cotton bolls picked) treated per time unit |
| CORT: Capability to Operate under Real-Time conditions (CORT+ or CORT-) | The ability of a robot to accomplish tasks under real-time conditions presented in binary form: either can operate under real-time conditions, CORT+, or cannot operate under real-time conditions, CORT-. This can be achieved if navigation, sensing, and manipulation are well designed. |
| DC: Detection Capability (DC+ or DC-) | The ability of robot sensors to detect objects to accomplish a specific mission and it is presented in binary form; either a robot can detect an object, DC+; or cannot detect an object, DC- |
| DP: Detection Performance (%) | Performance of the robot in detecting objects for its mission. Detection results can be True Positives (TP), False Positives (FP), True Negatives (TN), and False Negatives (FN). DP is the sum of the True positives and True Negatives over all the elements that were presented for detection. Other parameters like accuracy, recall, precision, and F1 score can be calculated [13]. |
| ASR: Action Success Ratio (%) | The ratio of successful actions performed by the robot without destroying the plant over the total number of actions |
| ADM: Appropriate Decision-Making (%) | The ratio of the number of correct decisions made over all the decisions done by the robot while accomplishing an agricultural task |
| PEa: Position Error Average and PEsd: Position Error Standard Deviation (inch, etc.) | The standard deviation and average of positioning error made by a robot from true locations where it is located to reported location sensed by the robot’s sensors. |
| Safety | It the parameter that describes robot behavior on the farm that cannot threaten other objects around the farm. It is the safe actions of the robot while operating in an agricultural field. |
| Wholeness | The ability of the robot to execute tasks as required or as designed to full completion using its autonomous coordination of actions to accomplish all the tasks. |
| Activity | Reference | Mobility | Sensing | Path Planning | Manipulation |
|---|---|---|---|---|---|
| Weeding | [60,61] | Four-wheel vehicle | Camera, GPS, and angle sensors | Hough transform method for detection of rows | N/A |
| [31] | Four-wheel vehicle | Camera, GPS, gyroscope, magnetometer | Strategic planning (based on previous knowledge of weed population), adaptive planning (for the unexpected occurrence of weeds) and path tracking control | N/A | |
| [33] | Continuous track vehicle | IMU and LRF | Path Tracking methods | The inter-row spacing weeder was made of three spiral-type cutters (three arms and three weeder plows) [2DOF] | |
| Pruning | [62] | Four active wheels are set at regular intervals around the tree | N/A | Climbing method (implementing rotation of wheels along the vertical direction and diameter of the trunk). | 2DOF (with cutting blade) |
| [63] | Two active wheels | N/A | Climbing method (implementing rotation of wheels along the vertical direction and diameter of the trunk). Arm trajectory motion planning with a search mechanism | 9DOF (with cutting blade) | |
| [64] | Four-wheel vehicle | 3D cameras | The randomized path planner [random tree (RRT)-based planner, RRT-Connect] | 6DOF (cutting tool consists of a router mill-end attached to a high-speed motor) | |
| [65] | Four active wheels | 3D position measurement device and 3D orientation sensor | Innovative climbing strategy [grid based] | 2DOF | |
| Soil Sampling | [52] | Two-wheel robot | GPS, encoder | GPS path tracking [Adaptive grid-based Navigation] | 2DOF (Linear actuator and Cone penetrometer) |
| [66] | Four-wheel vehicle (Thorvald) | RTK-GPS, force sensor, measurement device, soil moisture sensor | GPS tracking method [grid-based] | 2 DOF (penetrometer) | |
| [67] | Four-wheel vehicle (BoniRob) | RTK-GPS, and soil moisture sensor | GPS tracking method [grid-based] | 2 DOF (penetrometer) | |
| Scouting or phenotyping | [68] | Four-wheel vehicle | RTK-GPS, NIR camera, and RGB Multicamera system | GPS Auto steering methods | N/A |
| [69] | Four-wheel tractor | RGB Stereo camera, RTK-GPS | GPS Auto steering method | N/A | |
| [70] | Four-wheel tractor | GPS, RGB camera, inertial sensors, 3D LIDAR, 2D security lasers, IMU | Simultaneous Localization And Mapping | N/A | |
| [71] | Continuous track | RGB Stereo cameras, single-chip ToF sensor, IR sensor, RTK-GPS gyroscope, and optical encoders | Extended Kalman filter (EKF) and nonlinear model predictive control | N/A | |
| Spraying | [72] | Sliding on rails vehicles | Induction sensors, IR sensors, bump sensors | N/A since it was following the rails | N/A |
| [73] | Four-wheel vehicle | Camera, temperature, humidity, soil moisture sensors, GSM modem | N/A | N/A | |
| [74] | Four-wheel vehicle | LRF sensor, GPS and magnetic sensor | Path tracking method and self-positioning method | N/A | |
| [75] | Four-wheel vehicle | LRF sensor, ultrasonic, laser scanner, stereo camera, encoders and GPS | Path tracking using planned trajectory | N/A | |
| Sowing | [76] | Four-wheel vehicle | Encoder, angle sensor, pressure sensor, IR sensor | Path tracking methods | 2DOF (sowing device) |
| [77] | Continuous track [caterpillar treads ] | Magnetometer, the ultrasonic sensor | Navigation by using sensor data to follow rows | 2DOF (sowing device) |
| Reference/Crop | Mobility | Sensing | Path Planning | Manipulation |
|---|---|---|---|---|
| [78] for Sweet pepper | The railed vehicle robot platform | A ToF camera, RGB cameras | Robot over the rails. Manipulator used Arm trajectory motion planning with a search mechanism | 9DOF, Fin Ray end effector (scissors and fingers) and Lip-type end effector (knife and vacuum sensor). |
| [84] for Tomato | Four-wheel vehicle | binocular stereo vision | PID control for Ackerman steering geometry. The manipulator used C-space and the A* search algorithm | 5DOF harvesting manipulator |
| [88] for strawberry | Four-wheel vehicle [Thorvald II] | RGB-D camera, IR sensor | Vehicle controlled manually by a joystick, but manipulator used motion sequence planning algorithm | 5DOF arm with a cable-driven gripper |
| [79] for cherry-tomato | The railed vehicle robot platform | RGB Stereo camera, Laser sensor | Arm trajectory motion planning for the manipulator | 6DOF with double cutter end-effector |
| [91] for Kiwi-fruit | Four-wheel vehicle robot | Laser sensors, Hall position sensor, Pressure sensor, Optical fiber sensor | Arm trajectory motion planning without search mechanism | 2DOF with 3D printed bionic fingers end-effector |
| [83] for Mellon | The 2-m wide rectangular frame which spans the melon bed robot with four wheels | RTK-GPS, encoders, RBB stereo cameras | Arm trajectory motion planning without search mechanism | 3DOF Multiple Cartesian manipulators |
| [92] for Tomatoes | The railed vehicle robot platform | RGB Cameras, wheel encoders, a gyroscope and an ultra-wideband (UWB) indoor positioning system | Arm trajectory motion planning without search mechanism | 6DOF manipulator with a 3D printed gripper |
| [93] for Apples | Four-wheel vehicle | RGB cameras, wheel Encoders | A visual servo algorithm based on fuzzy neural network adaptive sliding mode control for vehicle and manipulator | 5DOF manipulator |
| [94] for Tomatoes | The railed vehicle robot platform | RGB stereo camera | Inverse kinematics for manipulator and no navigation algorithm for vehicle and Arm trajectory motion planning | Two 3-DOF Cartesian type robot manipulators with saw cutting type end-effector |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fue, K.G.; Porter, W.M.; Barnes, E.M.; Rains, G.C. An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting. AgriEngineering 2020, 2, 150-174. https://0-doi-org.brum.beds.ac.uk/10.3390/agriengineering2010010
Fue KG, Porter WM, Barnes EM, Rains GC. An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting. AgriEngineering. 2020; 2(1):150-174. https://0-doi-org.brum.beds.ac.uk/10.3390/agriengineering2010010
Chicago/Turabian StyleFue, Kadeghe G., Wesley M. Porter, Edward M. Barnes, and Glen C. Rains. 2020. "An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting" AgriEngineering 2, no. 1: 150-174. https://0-doi-org.brum.beds.ac.uk/10.3390/agriengineering2010010