
Development of a New Wearable 3D Sensor Node and Innovative Open Classification System for Dairy Cows’ Behavior

 , , , ,
, , , ,
Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
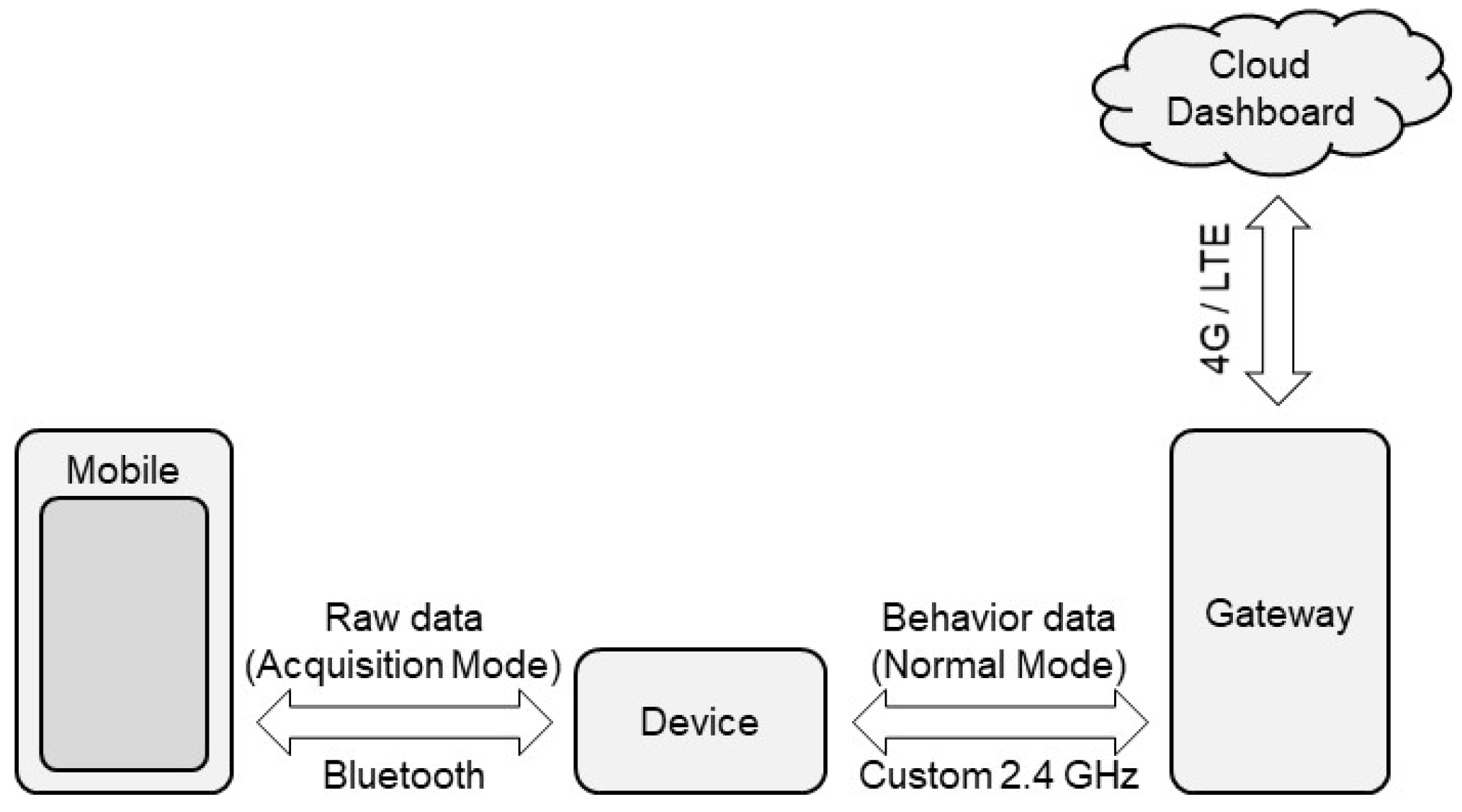
2.1. Device Description
2.1.1. Acquisition Mode
2.1.2. Normal Operating Mode
2.2. Data Collection on Farms
2.2.1. Farms Description
2.2.2. Installation of the Sensor Nodes and Behavioral Observations
2.3. Development of the Algorithm
2.3.1. Methodological Approach
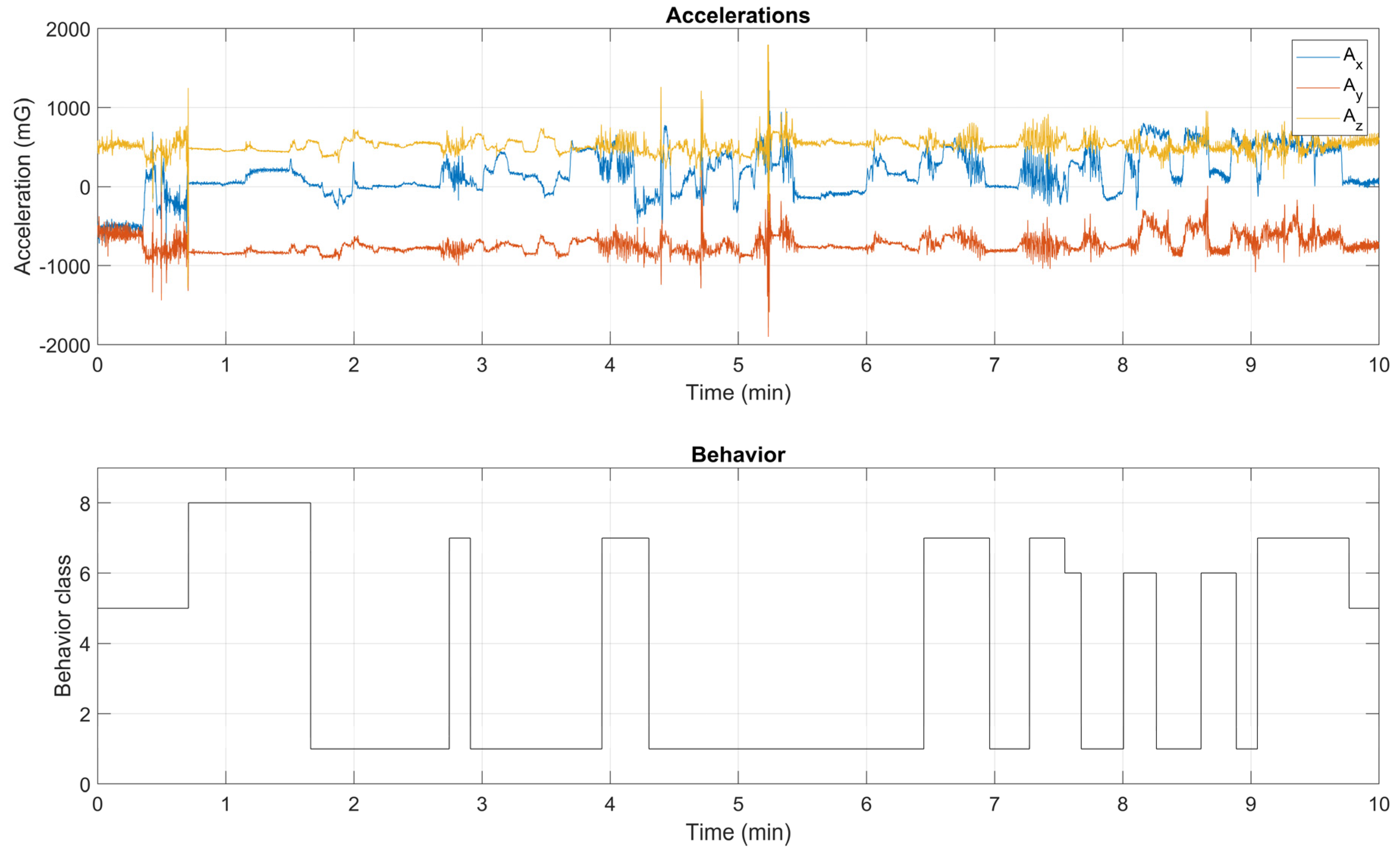
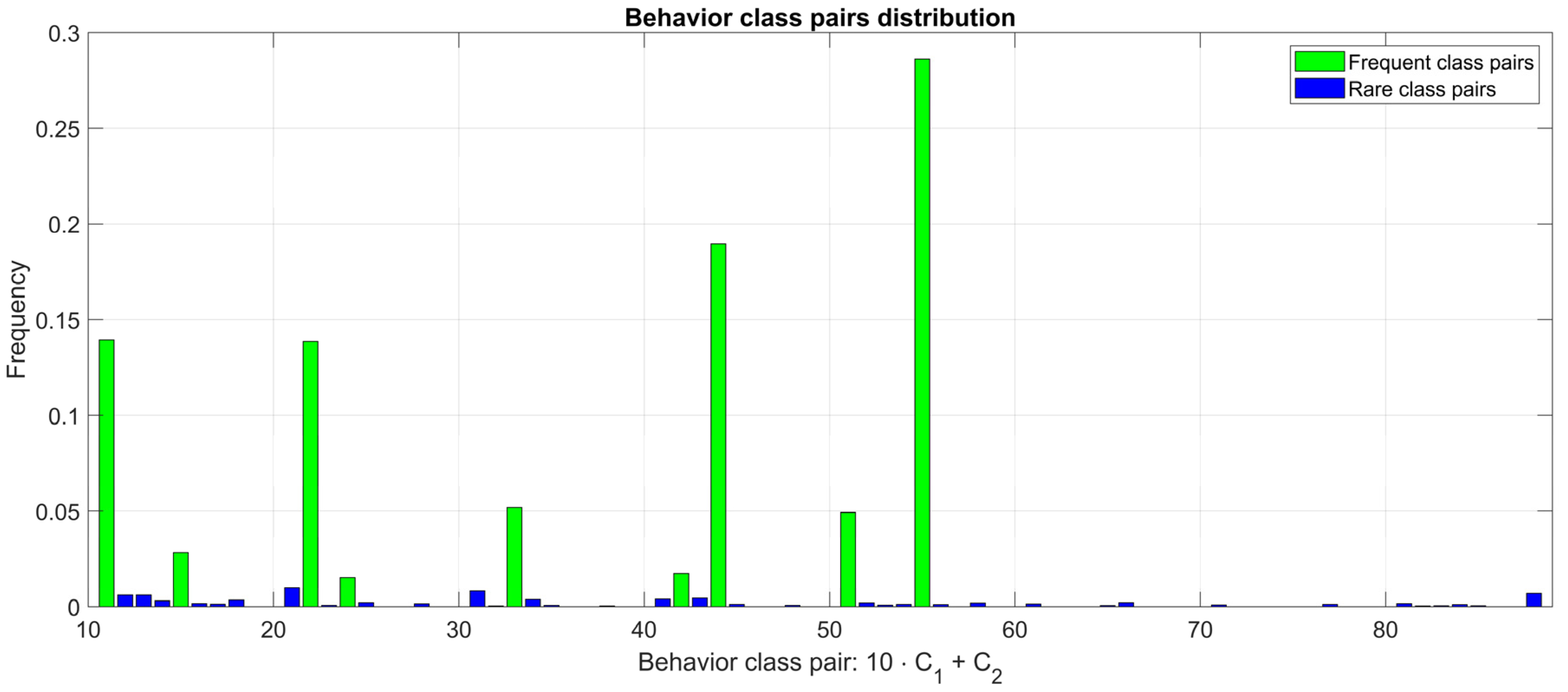
2.3.2. Behavior Windowing and Class Definition
- for at least 60% of the time, certainly
- for at least 80% of the time with a probability of 68%
- for at least 90% of the time with a probability of 55%
- for at least 99% of the time with a probability of 39%
- and a classification shall be interpreted as follows:
- for at least 40% of the time
- for a longer time than
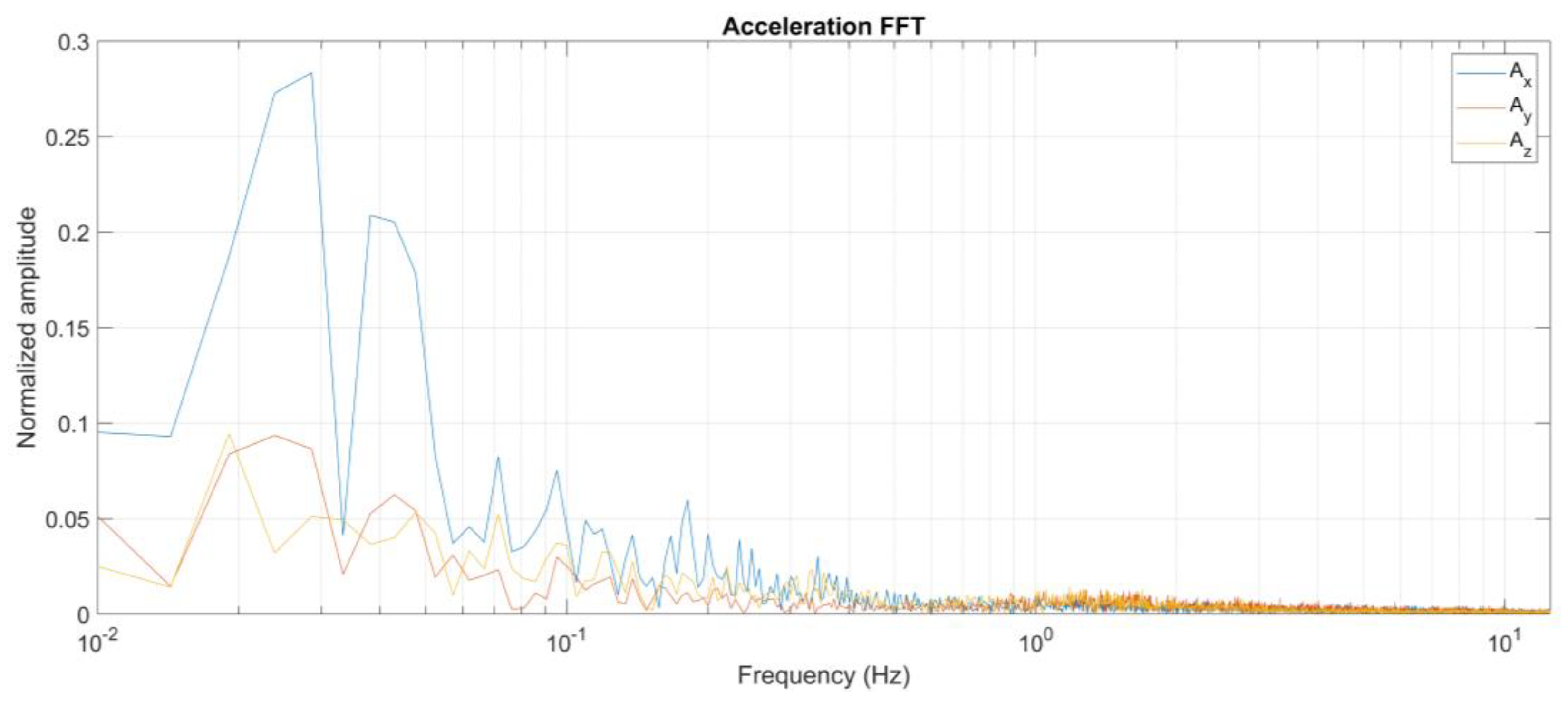
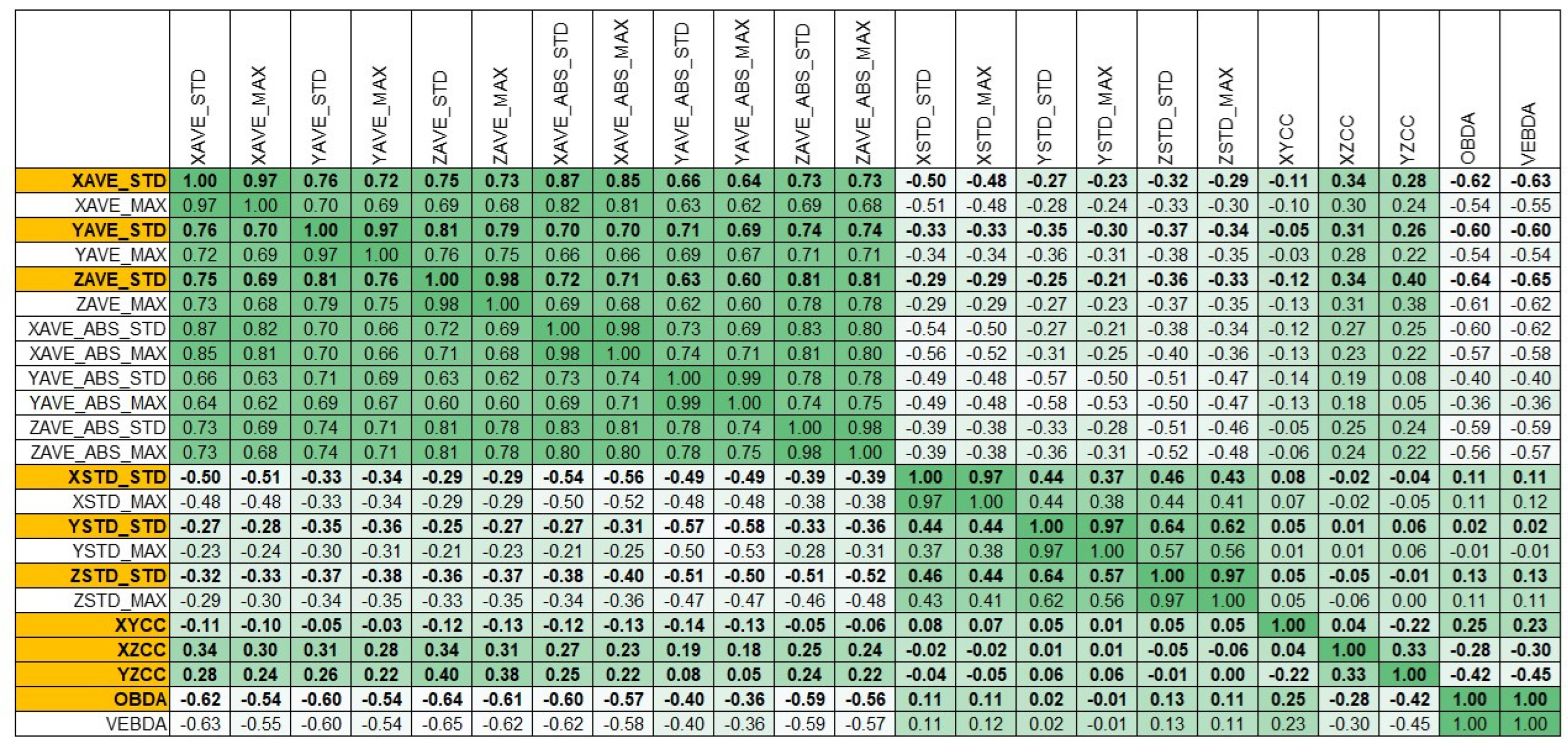
2.3.3. Feature Extraction
Acceleration Windowing
Features Reduction
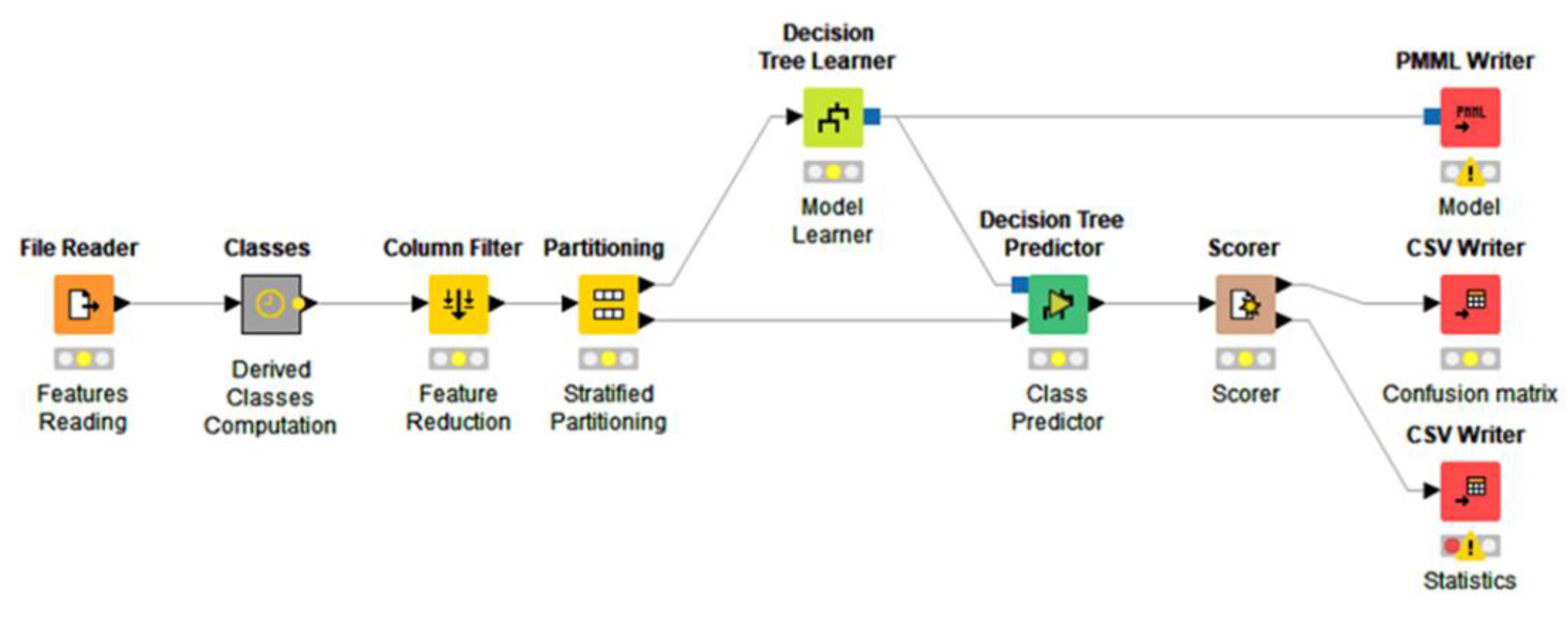
2.3.4. Classifier Learning
- Classifier 1:
- Classifier 2:
- Classifier 3:
- Classifier 4:
- Classifier 5:
2.3.5. Combined Classifier
2.3.6. Model Validation
3. Results
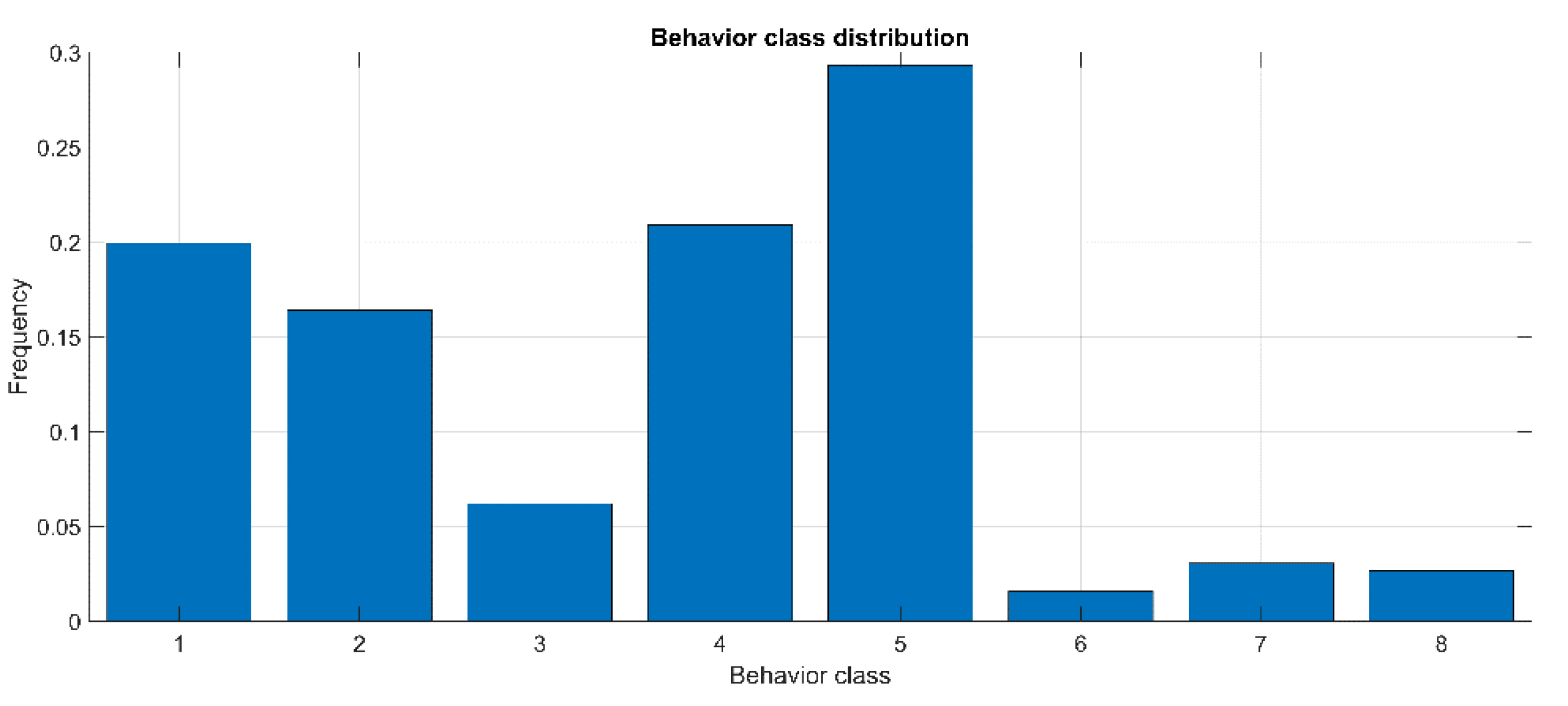
3.1. Observed Behaviors and Evaluations about the Feature Selection
3.2. Training and Validation of the Model
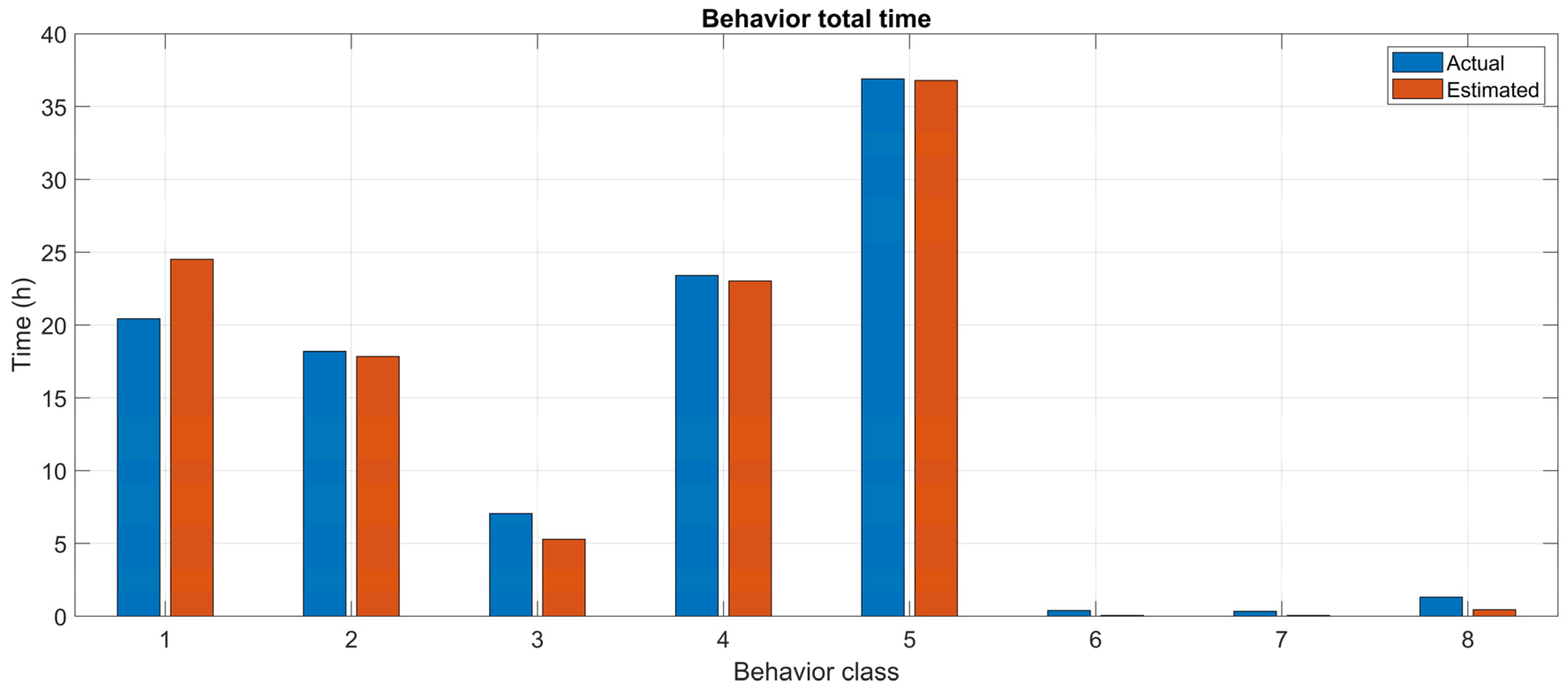
3.3. Sensitivity Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lovarelli, D.; Bacenetti, J.; Guarino, M. A review on dairy cattle farming: Is precision livestock farming the compromise for an environmental, economic and social sustainable production? J. Clean. Prod. 2020, 262, 121409. [Google Scholar] [CrossRef]
- Dominiak, K.N.; Kristensen, A.R. Prioritizing alarms from sensor-based detection models in livestock production—A review on model performance and alarm reducing methods. Comput. Electron. Agric. 2017, 133, 46–67. [Google Scholar] [CrossRef]
- Berckmans, D. General introduction to precision livestock farming. Anim. Front. 2017, 7, 6–11. [Google Scholar] [CrossRef]
- Halachmi, I.; Guarino, M.; Bewley, J.; Pastell, M. Smart Animal Agriculture: Application of Real-Time Sensors to Improve Animal Well-Being and Production. Annu. Rev. Anim. Biosci. 2019, 7, 403–425. [Google Scholar] [CrossRef] [PubMed]
- Leliveld, L.M.C.; Provolo, G. A review of welfare indicators of indoor-housed dairy cow as a basis for integrated automatic welfare assessment systems. Animals 2020, 10, 1430. [Google Scholar] [CrossRef] [PubMed]
- Benaissa, S.; Tuyttens, F.A.M.; Plets, D.; de Pessemier, T.; Trogh, J.; Tanghe, E.; Martens, L.; Vandaele, L.; Van Nuffel, A.; Joseph, W.; et al. On the use of on-cow accelerometers for the classification of behaviours in dairy barns. Res. Vet. Sci. 2019, 125, 425–433. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hendriks, S.J.; Phyn, C.V.C.; Huzzey, J.M.; Mueller, K.R.; Turner, S.-A.; Donaghy, D.J.; Roche, J.R. Graduate Student Literature Review: Evaluating the appropriate use of wearable accelerometers in research to monitor lying behaviors of dairy cows. J. Dairy Sci. 2020, 103, 12140–12157. [Google Scholar] [CrossRef]
- Pavlovic, D.; Davison, C.; Hamilton, A.; Marko, O.; Atkinson, R.; Michie, C.; Crnojevic, V.; Andonovic, I.; Bellekens, X.; Tachtatzis, C. Classification of cattle behaviours using neck-mounted accelerometer-equipped collars and convolutional neural networks. Sensors 2021, 21, 4050. [Google Scholar] [CrossRef]
- Arcidiacono, C.; Porto, S.M.C.; Mancino, M.; Cascone, G. Development of a threshold-based classifier for real-time recognition of cow feeding and standing behavioural activities from accelerometer data. Comput. Electron. Agric. 2017, 134, 124–134. [Google Scholar] [CrossRef]
- Carslake, C.; Vázquez-Diosdado, J.A.; Kaler, J. Machine learning algorithms to classify and quantify multiple behaviours in dairy calves using a sensor–moving beyond classification in precision livestock. Sensors 2021, 21, 88. [Google Scholar] [CrossRef]
- Mottram, T. Animal board invited review: Precision livestock farming for dairy cows with a focus on oestrus detection. Animal 2016, 10, 1575–1584. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Riaboff, L.; Relun, A.; Petiot, C.-E.; Feuilloy, S.; Couvreur, S.; Madouasse, A. Identification of discriminating behavioural and movement variables in lameness scores of dairy cows at pasture from accelerometer and GPS sensors using a Partial Least Squares Discriminant Analysis. Prev. Vet. Med. 2021, 193, 105383. [Google Scholar] [CrossRef] [PubMed]
- Pastell, M.; Tiusanen, J.; Hakojärvi, M.; Hänninen, L. A wireless accelerometer system with wavelet analysis for assessing lameness in cattle. Biosyst. Eng. 2009, 104, 545–551. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Wang, J.; Zhao, K.; Li, X.; Liu, B. Using machine-learning technique for estrus onset detection in dairy cows from acceleration and location data acquired by a neck-tag. Biosyst. Eng. 2022, 214, 193–206. [Google Scholar] [CrossRef]
- Arcidiacono, C.; Porto, S.M.C.; Mancino, M.; Cascone, G. A software tool for the automatic and real-time analysis of cow velocity data in free-stall barns: The case study of oestrus detection from Ultra-Wide-Band data. Biosyst. Eng. 2018, 173, 157–165. [Google Scholar] [CrossRef]
- Davison, C.; Michie, C.; Hamilton, A.; Tachtatzis, C.; Andonovic, I.; Gilroy, M. Detecting heat stress in dairy cattle using neck-mounted activity collars. Agriculture 2020, 10, 210. [Google Scholar] [CrossRef]
- Lovarelli, D.; Finzi, A.; Mattachini, G.; Riva, E. A Survey of Dairy Cattle Behavior in Different Barns in Northern Italy. Animals 2020, 10, 713. [Google Scholar] [CrossRef] [Green Version]
- Riaboff, L.; Shalloo, L.; Smeaton, A.F.; Couvreur, S.; Madouasse, A.; Keane, M.T. Predicting livestock behaviour using accelerometers: A systematic review of processing techniques for ruminant behaviour prediction from raw accelerometer data. Comput. Electron. Agric. 2022, 192, 106610. [Google Scholar] [CrossRef]
- Achour, B.; Belkadi, M.; Aoudjit, R.; Laghrouche, M. Unsupervised automated monitoring of dairy cows’ behavior based on Inertial Measurement Unit attached to their back. Comput. Electron. Agric. 2019, 167, 105068. [Google Scholar] [CrossRef]
- Krieger, S.; Oczak, M.; Lidauer, L.; Berger, A.; Kickinger, F.; Öhlschuster, M.; Auer, W.; Drillich, M.; Iwersen, M. An ear-attached accelerometer as an on-farm device to predict the onset of calving in dairy cows. Biosyst. Eng. 2019, 184, 190–199. [Google Scholar] [CrossRef]
- Arablouei, R.; Currie, L.; Kusy, B.; Ingham, A.; Greenwood, P.L.; Bishop-Hurley, G. In-situ classification of cattle behavior using accelerometry data. Comput. Electron. Agric. 2021, 183, 106045. [Google Scholar] [CrossRef]
- Barker, Z.E.; Vázquez Diosdado, J.A.; Codling, E.A.; Bell, N.J.; Hodges, H.R.; Croft, D.P.; Amory, J.R. Use of novel sensors combining local positioning and acceleration to measure feeding behavior differences associated with lameness in dairy cattle. J. Dairy Sci. 2018, 101, 6310–6321. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bidder, O.R.; Campbell, H.A.; Gómez-Laich, A.; Urgé, P.; Walker, J.; Cai, Y.; Gao, L.; Quintana, F.; Wilson, R.P. Love thy neighbour: Automatic animal behavioural classification of acceleration data using the k-nearest neighbour algorithm. PLoS ONE 2014, 9, e88609. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vázquez Diosdado, J.A.; Barker, Z.E.; Hodges, H.R.; Amory, J.R.; Croft, D.P.; Bell, N.J.; Codling, E.A. Classification of behaviour in housed dairy cows using an accelerometer-based activity monitoring system. Anim. Biotelemetry 2015, 3, 15. [Google Scholar] [CrossRef] [Green Version]
- Gomez, A.; Cook, N.B. Time budgets of lactating dairy cattle in commercial freestall herds. J. Dairy Sci. 2010, 93, 5772–5781. [Google Scholar] [CrossRef] [PubMed]
- Collier, R.J.; Dahl, G.E.; Vanbaale, M.J. Major advances associated with environmental effects on dairy cattle. J. Dairy Sci. 2006, 89, 1244–1253. [Google Scholar] [CrossRef]
- Das, S.K.; Karunakaran, M.; Barbuddhe, S.B.; Singh, N.P. Effect of Orientation, Ventilation, Floor Space Allowance and Cooling Arrangement on Milk Yield and Microclimate of Dairy Shed in Goa. J. Anim. Res. 2015, 5, 231. [Google Scholar] [CrossRef]
- Martiskainen, P.; Järvinen, M.; Skön, J.P.; Tiirikainen, J.; Kolehmainen, M.; Mononen, J. Cow behaviour pattern recognition using a three-dimensional accelerometer and support vector machines. Appl. Anim. Behav. Sci. 2009, 119, 32–38. [Google Scholar] [CrossRef]
- Germani, L.; Mecarelli, V.; Baruffa, G.; Rugini, L.; Frescura, F. An IoT architecture for continuous livestock monitoring using lora LPWAN. Electronics 2019, 8, 1435. [Google Scholar] [CrossRef] [Green Version]
- Robert, B.; White, B.J.; Renter, D.G.; Larson, R.L. Evaluation of three-dimensional accelerometers to monitor and classify behavior patterns in cattle. Comput. Electron. Agric. 2009, 67, 80–84. [Google Scholar] [CrossRef]
- Silicon Labs. Available online: https://www.silabs.com/wireless/bluetooth/efr32bg13-series-1-modules (accessed on 10 January 2022).
- Bosch. Available online: https://www.bosch-sensortec.com/products/motion-sensors/accelerometers/bma400/ (accessed on 10 January 2022).
- Matlab, Mathworks. Available online: https://www.mathworks.com/products/matlab.html (accessed on 10 January 2022).
- Knime. Available online: https://www.knime.com (accessed on 10 January 2022).
- González, L.A.; Bishop-Hurley, G.J.; Handcock, R.N.; Crossman, C. Behavioral classification of data from collars containing motion sensors in grazing cattle. Comput. Electron. Agric. 2015, 110, 91–102. [Google Scholar] [CrossRef]
- Wang, L.; Mendel, J.M. Generating fuzzy rules by learning from examples. IEEE Trans. Syst. Man Cybern. 1992, 22, 1414–1427. [Google Scholar] [CrossRef] [Green Version]
- Hearst, M.A.; Dumais, S.T.; Osuna, E.; Platt, J.; Scholkopf, B. Support vector machines. IEEE Intell. Syst. Appl. 1998, 13, 18–28. [Google Scholar] [CrossRef] [Green Version]
- Fix, E.; Hodges, J.L. Discriminatory Analysis. Nonparametric Discrimination: Consistency Properties (Report); USAF School of Aviation Medicine: Randolph Field, TX, USA, 1951. [Google Scholar]
- Ho, T.K. Random Decision Forests. In Proceedings of the 3rd International Conference on Document Analysis and Recognition, Montreal, QC, Canada, 14–16 August 1995; pp. 278–282. [Google Scholar]
- Rokach, L. Ensemble-based classifiers. Artif. Intell. Rev. 2009, 33, 1–39. [Google Scholar] [CrossRef]
- Quinlan, J.R. Induction of decision trees. Mach. Learn. 1986, 1, 81–106. [Google Scholar] [CrossRef] [Green Version]
- Rumelhart, D.E.; Hinton, G.E.; Ronald, J.W. Learning Internal Representations by Error Propagation; California Univ San Diego La Jolla Inst. for Cognitive Science: San Diego, CA, USA, 1985. [Google Scholar]
- Specht, D.F. Probabilistic neural networks. Neural Netw. 1990, 3, 109–118. [Google Scholar] [CrossRef]
- Nir, F.; Geiger, D.; Goldszmidt, M. Bayesian network classifiers. Mach. Learn. 1997, 29, 131–163. [Google Scholar]
- Andriamandroso, A.L.H.; Lebeau, F.; Beckers, Y.; Froidmont, E.; Dufrasne, I.; Heinesch, B.; Dumortier, P.; Blanchy, G.; Blaise, Y.; Bindelle, J. Development of an open-source algorithm based on inertial measurement units (IMU) of a smartphone to detect cattle grass intake and ruminating behaviors. Comput. Electron. Agric. 2017, 139, 126–137. [Google Scholar] [CrossRef]
- Dutta, R.; Smith, D.; Rawnsley, R.; Bishop-Hurley, G.; Hills, J.; Timms, G.; Henry, D. Dynamic cattle behavioural classification using supervised ensemble classifiers. Comput. Electron. Agric. 2015, 111, 18–28. [Google Scholar] [CrossRef]
- Fournel, S.; Rousseau, A.N.; Laberge, B. Rethinking environment control strategy of confined animal housing systems through precision livestock farming. Biosyst. Eng. 2017, 155, 96–123. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Behavior | Description |
|---|---|---|
| 1 | Standing | The cow has at least 3 legs resting without moving the body. It includes head movements and interactions with other animals. There may be small movements that do not significantly change the position, covering less space than the animal’s body length. The cow does not ruminate. |
| 2 | Lying | The body is in contact with the bottom of the cubicle. The cow can move its head and interact with other animals. The cow does not ruminate. |
| 3 | Standing and ruminating | Like standing, but in addition the cow ruminates. Ruminating: sequence consisting of regurgitating a bolus, followed by chewing the cud and then swallowing the masticated cud. |
| 4 | Lying and ruminating | Like lying, but in addition the cow ruminates. |
| 5 | Eating | Sequence consisting of lowering the head to the feed, taking a bite, chewing and swallowing. Short interruptions and interactions with other cows may occur. |
| 6 | Drinking | The cow has its head in the drinking trough and drinks water. |
| 7 | Walking | The cow changes position with a movement in a defined direction, covering at least a space equal to the animal’s body length. |
| 8 | Other | Other behaviors that do not fit in any of the previous categories (specification of the behavior was noted down manually). |
| Model | Reference | Accuracy | Complexity |
|---|---|---|---|
| Fuzzy Rules | [36] | 87–92% | Unfeasible |
| Support Vector Machines | [37] | Unfeasible | |
| K-Nearest Neighbors | [38] | Unfeasible | |
| Random Forest (large) | [39] | Critical | |
| Ensemble Decision Tree (large) | [40] | Critical | |
| Random Forest (small) | [39] | 75–90% | Medium |
| Decision Tree | [41] | Low | |
| Multi-Layer Perceptron | [42] | 55–75% | Low |
| Probabilistic Neural Networks | [43] | Low | |
| Naïve Bayes | [44] | Medium |
| Classifier | ||||||
|---|---|---|---|---|---|---|
| Accuracy | 79.9% | 87.6% | 82.0% | 91.0% | 69.3% | 81.0% |
| Classifiers | Partitioning | |||
|---|---|---|---|---|
| 25%/75% | 50%/50% | 75%/25% | 90%/10% | |
| Classifier 1 | 74.6% | 76.5% | 79.9% | 80.0% |
| Classifier 2 | 84.4% | 85.6% | 87.6% | 88.0% |
| Classifier 3 | 77.3% | 80.3% | 82.0% | 81.9% |
| Classifier 4 | 89.3% | 89.7% | 91.0% | 90.2% |
| Classifier 5 | 63.2% | 66.4% | 69.3% | 71.0% |
| Class Identifier | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Class | Standing | Lying | Standing and ruminating | Lying and ruminating | Eating |
| Error | −19.94% | 1.81% | 25.00% | 1.65% | 0.29% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lovarelli, D.; Brandolese, C.; Leliveld, L.; Finzi, A.; Riva, E.; Grotto, M.; Provolo, G. Development of a New Wearable 3D Sensor Node and Innovative Open Classification System for Dairy Cows’ Behavior. Animals 2022, 12, 1447. https://0-doi-org.brum.beds.ac.uk/10.3390/ani12111447
Lovarelli D, Brandolese C, Leliveld L, Finzi A, Riva E, Grotto M, Provolo G. Development of a New Wearable 3D Sensor Node and Innovative Open Classification System for Dairy Cows’ Behavior. Animals. 2022; 12(11):1447. https://0-doi-org.brum.beds.ac.uk/10.3390/ani12111447
Chicago/Turabian StyleLovarelli, Daniela, Carlo Brandolese, Lisette Leliveld, Alberto Finzi, Elisabetta Riva, Matteo Grotto, and Giorgio Provolo. 2022. "Development of a New Wearable 3D Sensor Node and Innovative Open Classification System for Dairy Cows’ Behavior" Animals 12, no. 11: 1447. https://0-doi-org.brum.beds.ac.uk/10.3390/ani12111447