Small-Signal Analysis and Control of Soft-Switching Naturally Clamped Snubberless Current-Fed Half-Bridge DC/DC Converter



Abstract
:Featured Application
Abstract
1. Introduction
2. Small-Signal Analysis
- (1)
- Make assumptions
- (2)
- Define state variables
- (3)
- Write state equations for each interval of operation
- (4)
- Average the state equations over a switching cycle
- (5)
- Introduce perturbation in state variables
- (6)
- Equate AC and DC quantities and proceed with AC equations
- (7)
- Take Laplace transform
- (8)
- Prepare matrix small-signal model
- (9)
- Calculate desired transfer functions
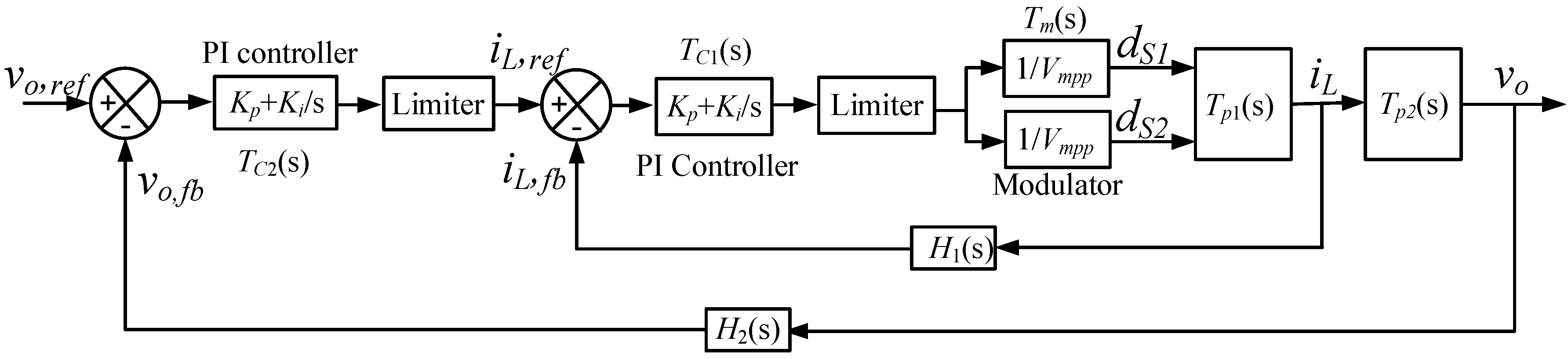
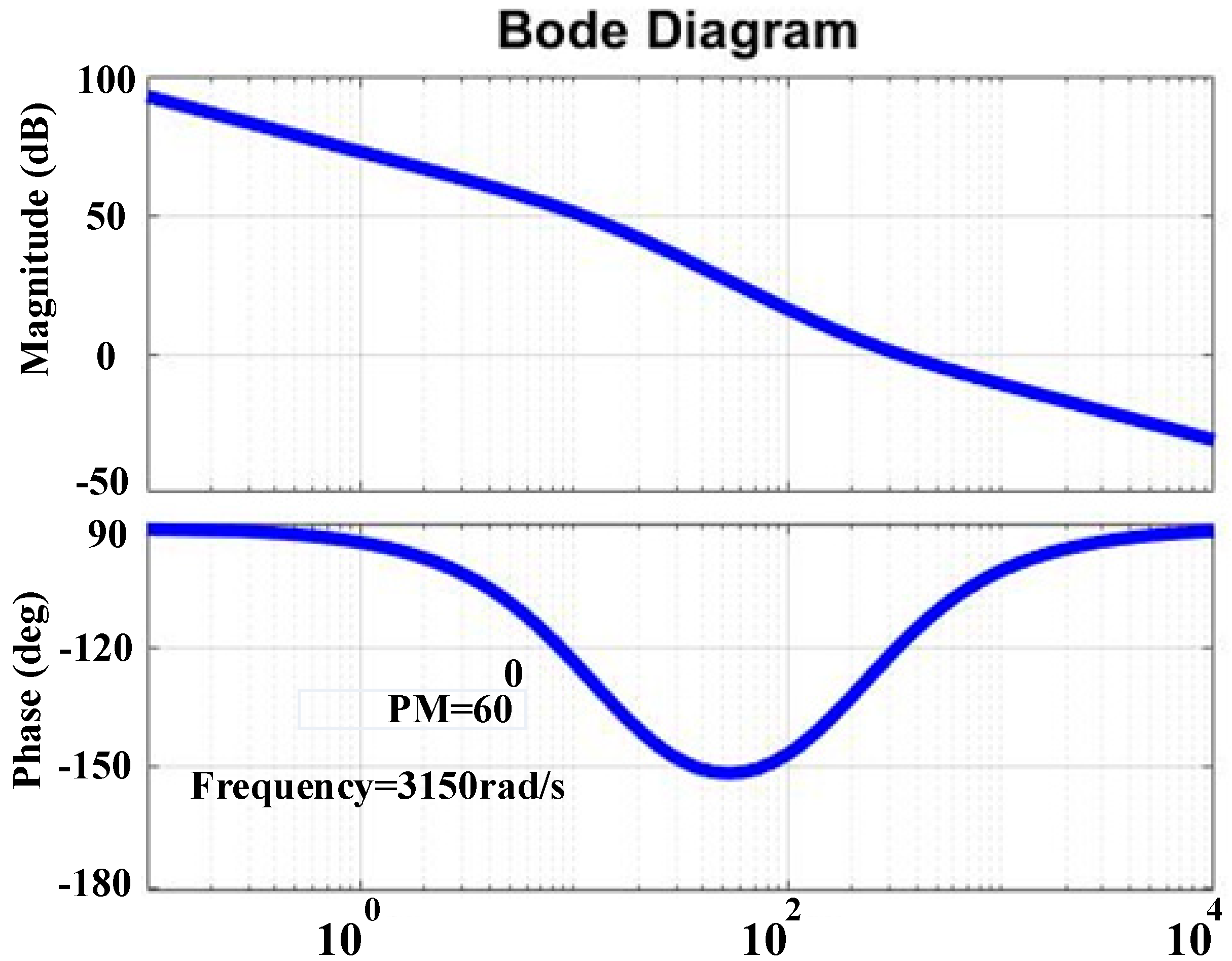
3. Two-Loop Closed-Loop Control Design
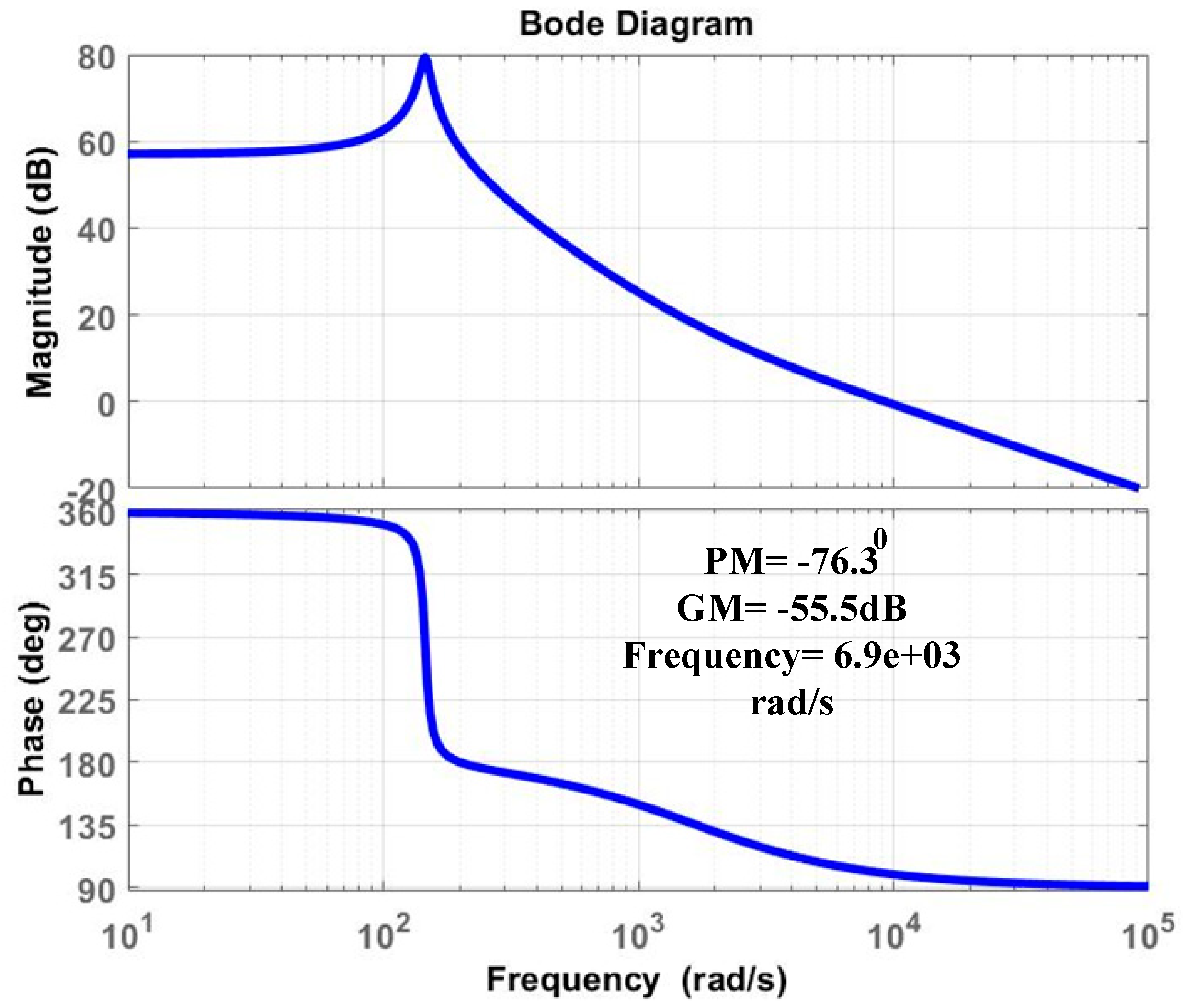
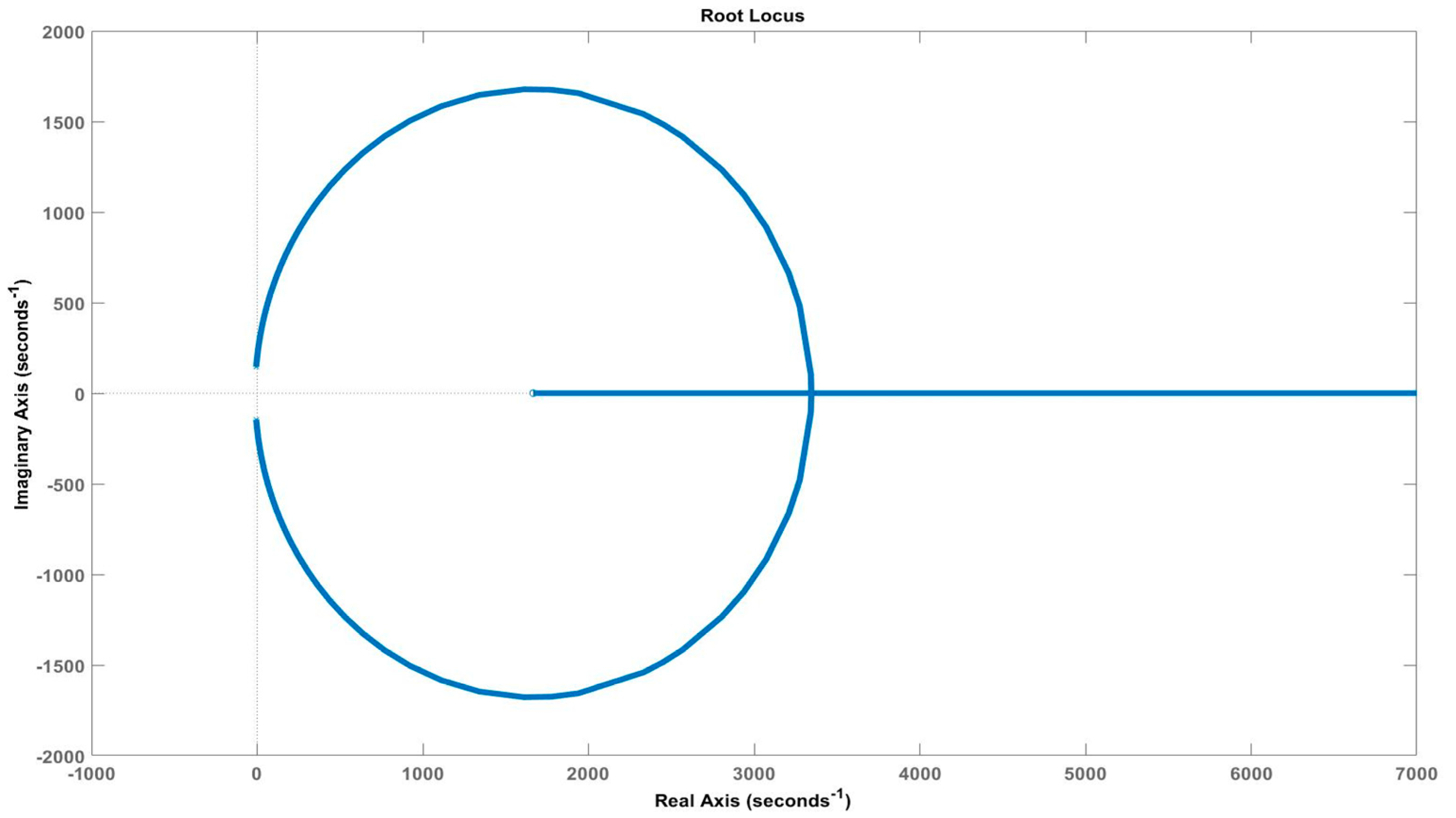
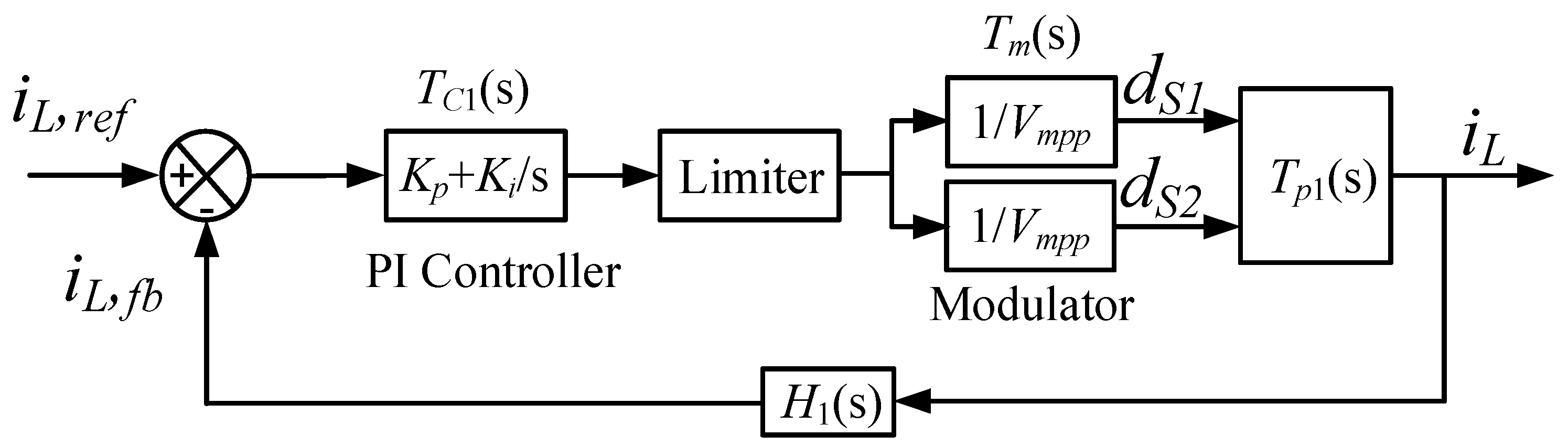
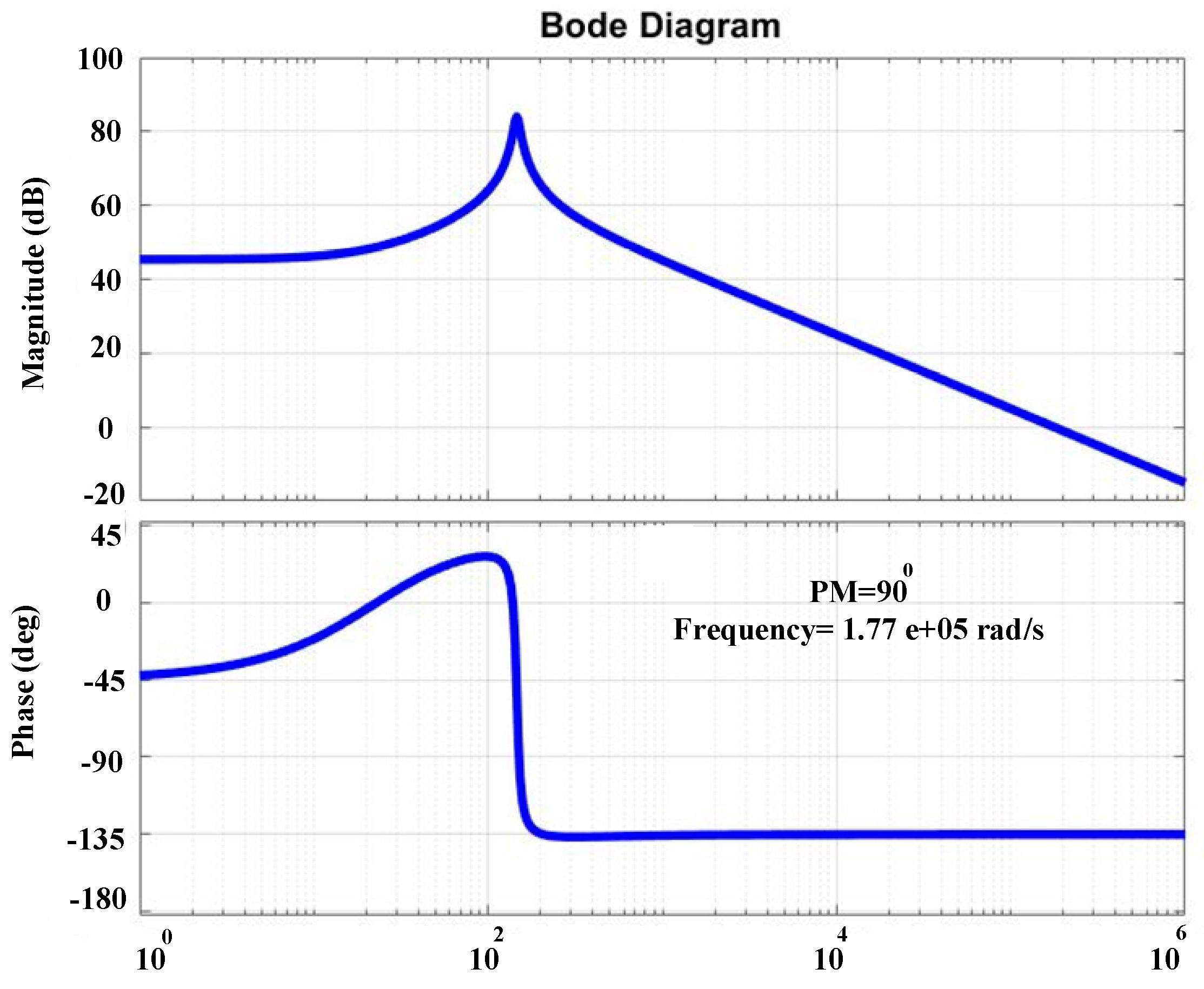
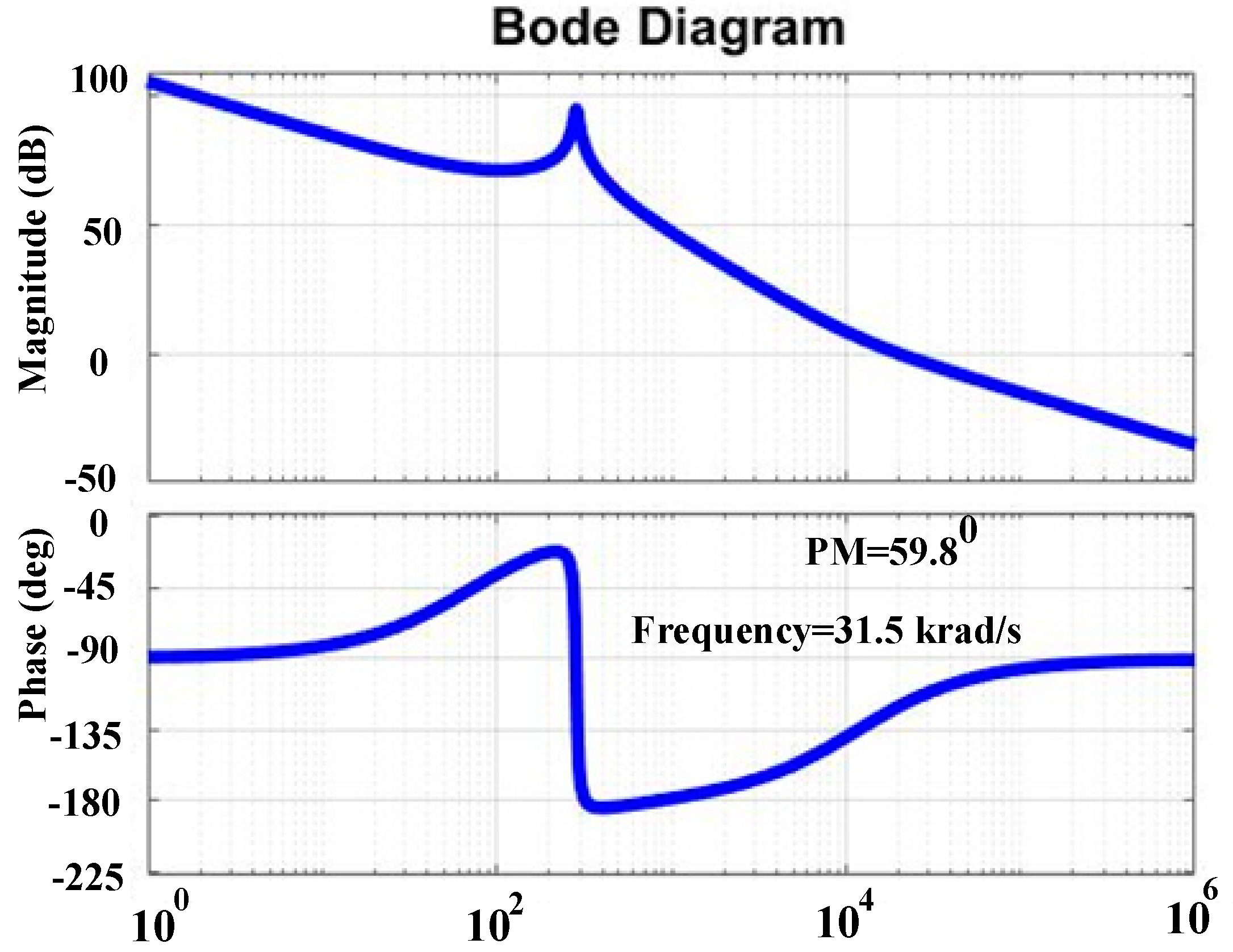
3.1. Current Control Loop Design
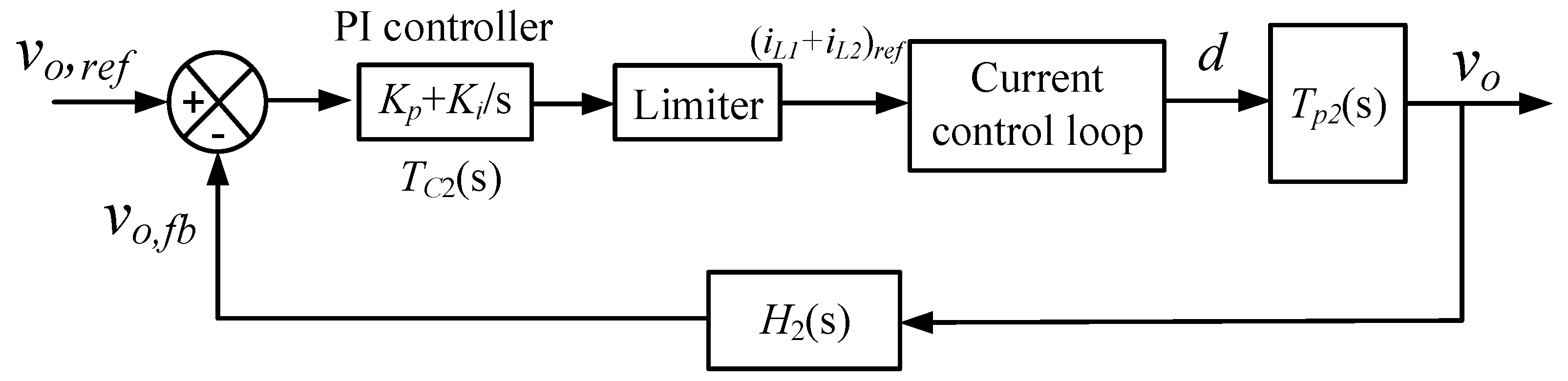
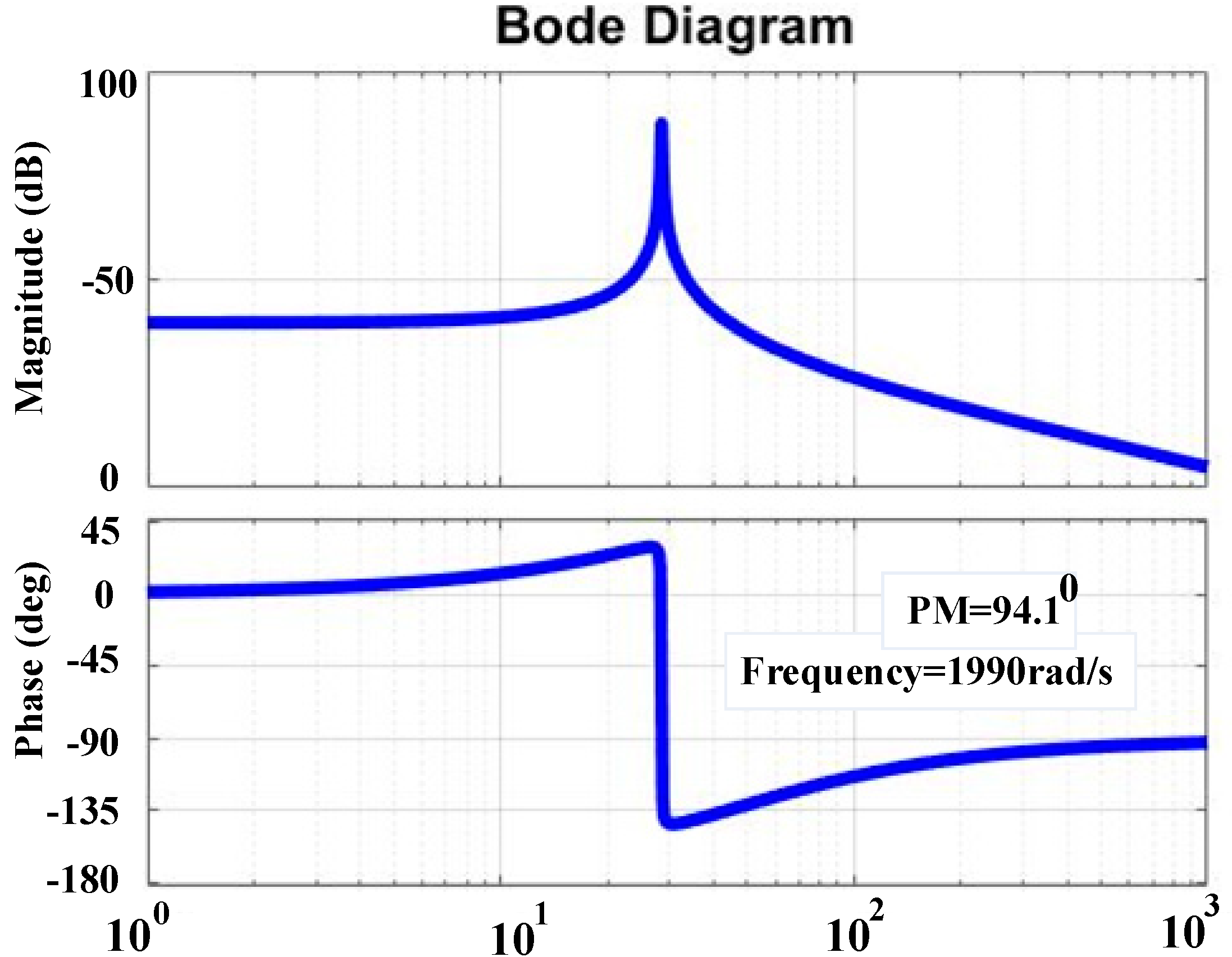
3.2. Voltage Control Loop Design
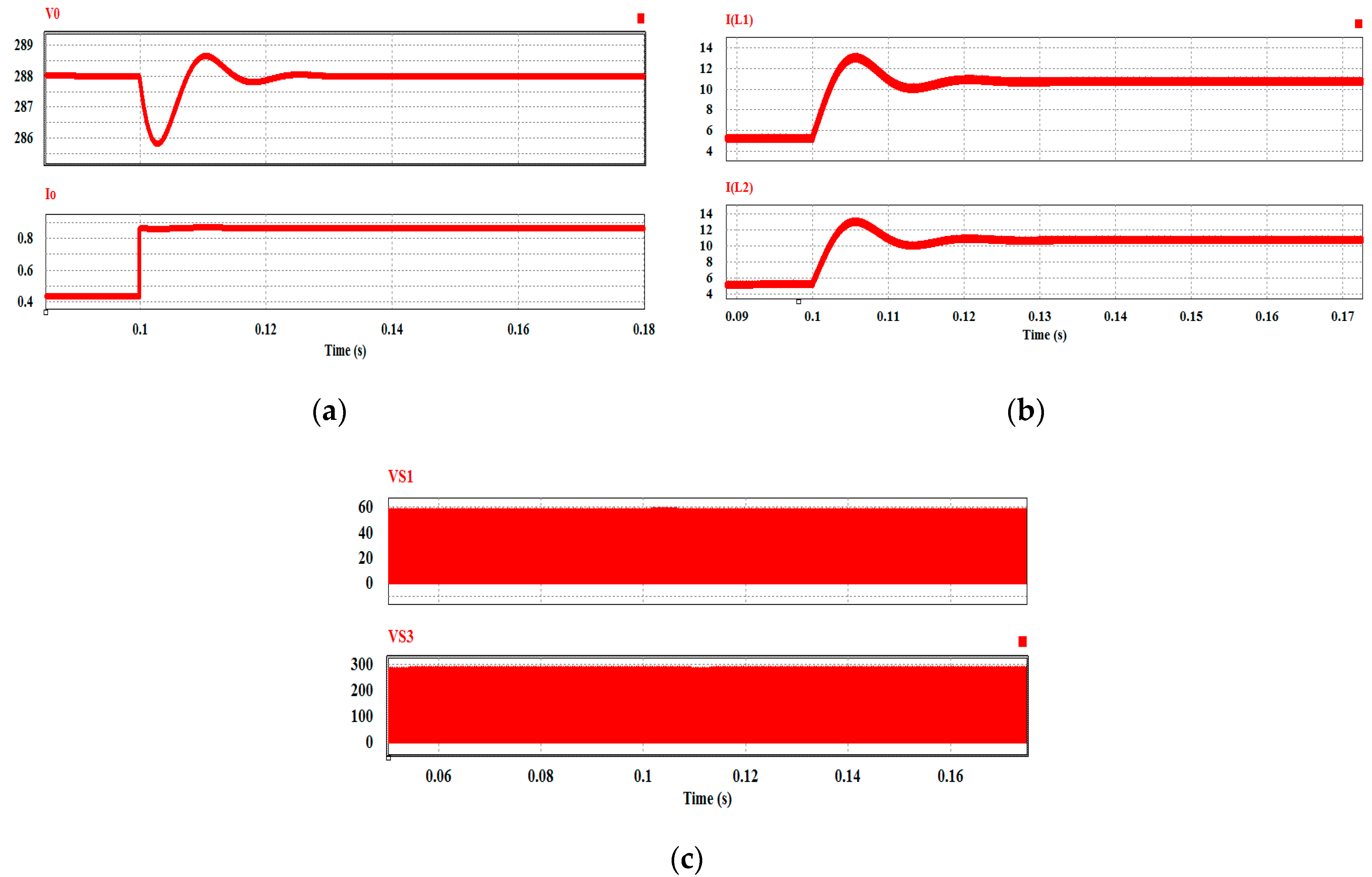
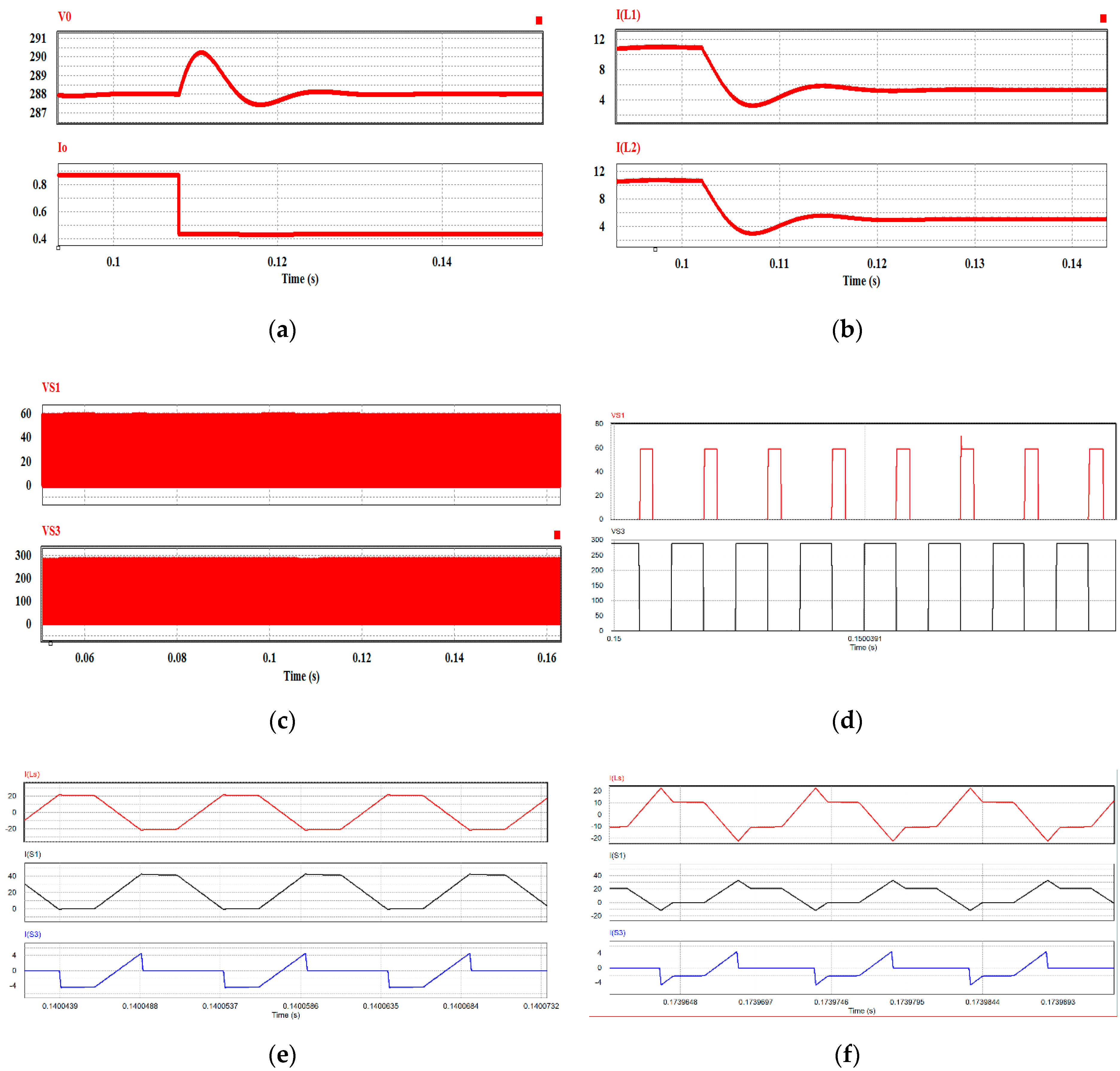
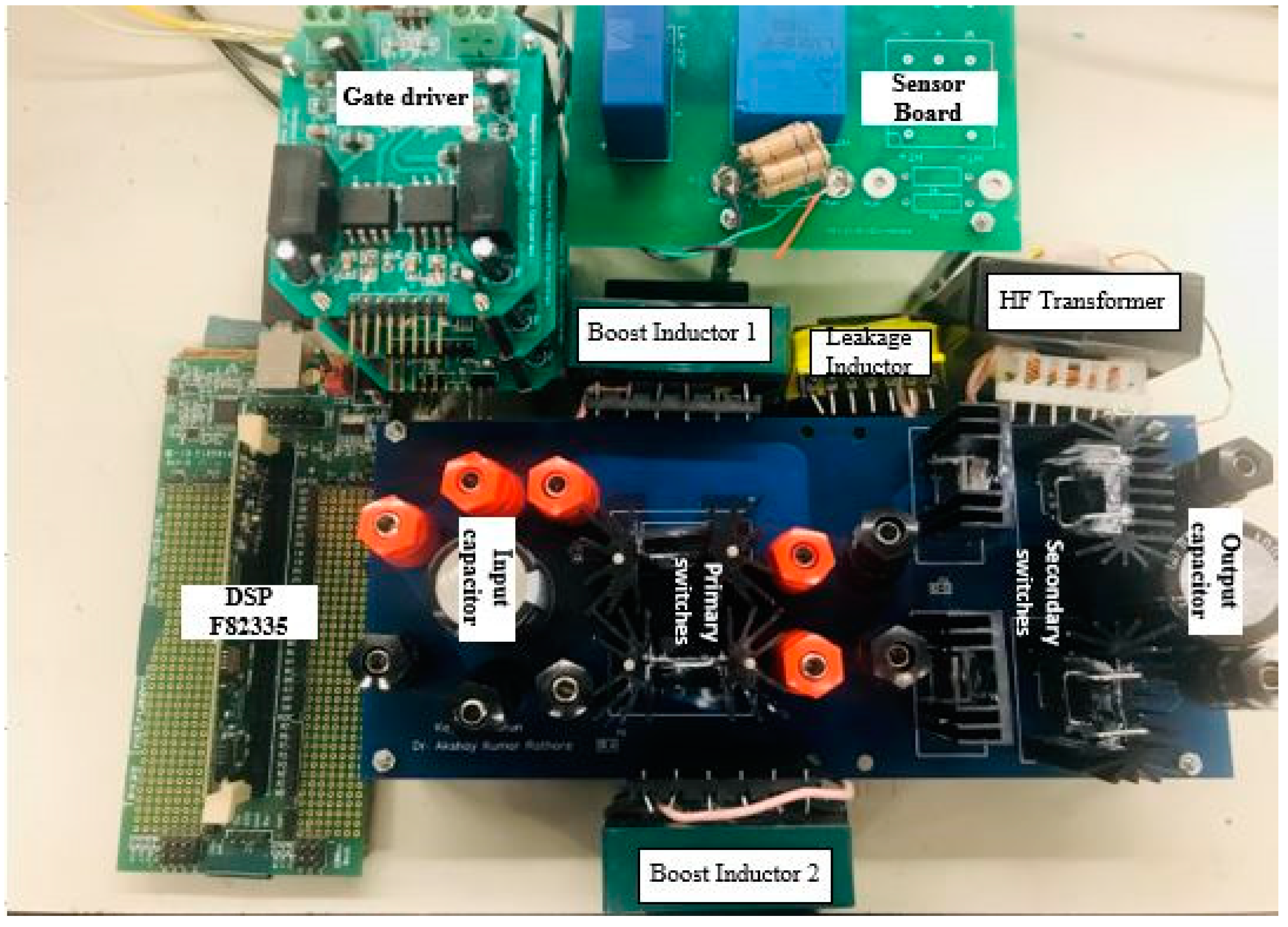
4. Simulation and Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aso, S.; Kizaki, M.; Nonobe, Y. Development of hybrid fuel cell vehicles in Toyota. In Proceedings of the IEEE Power Conversion Conference, Nagoya, Japan, 2–5 April 2007; pp. 1606–1611. [Google Scholar]
- Emadi, A.; Williamson, S.S. Fuel cell vehicles: Opportunities and challenges. In Proceedings of the IEEE Power Engineering Society General Meeting, Denver, CO, USA, 6–10 June 2004; pp. 1640–1645. [Google Scholar]
- Emadi, A.; Rajashekara, K.S.; Williamson, S.S.; Lukic, S.M. Topological overview of hybrid electric and fuel cell vehicular power system architectures and configurations. IEEE Trans. Veh. Technol. 2005, 54, 763–770. [Google Scholar] [CrossRef]
- Khaligh, A.; Li, Z. Battery, Ultracapacitor, FuelCell, and Hybrid Energy Storage Systems for Electric, Hybrid Electric, FuelCell, and Plug-In Hybrid Electric Vehicles: State of the Art. IEEE Trans. Veh. Technol. 2010, 59, 2806–2814. [Google Scholar] [CrossRef]
- Rathore, A.K.; Bhat, A.K.S.; Oruganti, R. Analysis, Design and Experimental Results of Wide Range ZVS Active-Clamped L-L Type Current-Fed DC/DC Converter for Fuel Cells to Utility Interface. IEEE Trans. Ind. Electron. 2011, 59, 473–485. [Google Scholar] [CrossRef]
- Wu, T.-F.; Chen, Y.-C.; Yang, J.-G.; Kuo, C.-L. Isolated bidirectional full-bridge DC–DC converter with a flyback snubber. IEEE Trans. Power Electron. 2010, 25, 1915–1922. [Google Scholar]
- Su, G.-J.; Adams, D.J.; Peng, F.Z.; Li, H. Experimental evaluation of a soft-switching DC/DC converter for fuel cell vehicle applications. In Proceedings of the Power Electronics in Transportation, Auburn Hills, MI, USA, 24–25 October 2002; pp. 39–44. [Google Scholar]
- Song, W.; Lehman, B. Current-fed dual-bridge DC–DC converter. IEEE Trans. Power Electron. 2007, 22, 461–469. [Google Scholar] [CrossRef]
- Averberg, A.; Meyer, K.R.; Mertens, A. Current-fed full-bridge converter for fuel cell systems. In Proceedings of the IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 866–872. [Google Scholar]
- Yakushev, V.; Meleshim, V.; Fraidlin, S. Full bridge isolated current fed converter with active-clamp. In Proceedings of the IEEE Applied Power Electronics Conference, Dallas, TX, USA, 14–18 March 1999; pp. 560–566. [Google Scholar]
- Rathore, A.K.; Prasanna, U.R. Comparison of soft-switching voltage-fed and current-fed bi-directional isolated Dc/Dc converters for fuel cell vehicles. In Proceedings of the IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 252–257. [Google Scholar]
- Zhu, L. A Novel Soft-Commutating Isolated Boost Full-bridge ZVS-PWM DC-DC Converter for Bi-directional High Power Applications. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004; Volume 21, pp. 422–429. [Google Scholar]
- Kim, E.S.; Joe, K.Y.; Choi, H.Y.; Kim, Y.H.; Cho, Y.H. An Improved Soft Switching Bi-directional PSPWM FB DC/DC Converter. In Proceedings of the IEEE Industrial Electronics Conference, Aachen, Germany, 31 August–4 September 1998; pp. 740–743. [Google Scholar]
- Miura, Y.; Kaga, M.; Horita, Y.; Ise, T. Bidirectional Isolated Dual Full-bridge dc-dc Converter with Active Clamp for EDLC. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 1036–1143. [Google Scholar]
- Wang, K.; Lin, C.Y.; Zhu, L.; Qu, D.; Lee, F.C.; Lai, J.S. Bidirectional DC/DC Converters for Fuel Cell Systems. In Proceedings of the IEEE Power Electronics in Transportation, Dearborn, MI, USA, 22–23 October 1998; pp. 47–51. [Google Scholar]
- Wang, K.; Lee, F.C.; Lai, J. Operation Principles of Bi-directional Full-bridge DC/DC Converter with Unified Soft switching Scheme and Soft-starting Capability. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, New Orleans, LA, USA, 6–10 February 2000; pp. 111–118. [Google Scholar]
- Rathore, A.K.; Prasanna, U.R. Analysis, design, and experimental results of novel snubberless bi-directional naturally clamped ZCS/ZVS current-fed half-bridge dc/dc converter for fuel cell vehicles. IEEE Trans. Ind. Electron. 2013, 60, 4482–4491. [Google Scholar] [CrossRef]
- Khatun, K.; Rathore, A.K. Small Signal Modeling, Closed Loop Design, and Transient Results of Snubberless Naturally-Clamped Soft-Switching Current-Fed Half-bridge DC/DC Converter. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 2571–2576. [Google Scholar]
- Lai, J.; Park, S.; Moon, S.; Chen, C.L. A High-Efficiency 5-kW Soft-Switched Power Conditioning System for Low-Voltage Solid Oxide Fuel Cells. In Proceedings of the IEEE Power Conversion Conference-Nagoya, Nagoya, Japan, 2–5 April 2007; pp. 463–470. [Google Scholar]
- Venkatraman, R.; Bhat, A.K.S. Small-signal analysis of a soft-switching, single-stage two-switch AC-to-DC converter. In Proceedings of the IEEE Power Electronics Specialists Conference, Vancouver, BC, Canada, 17–21 June 2001; pp. 1824–1830. [Google Scholar]
- Krein, P. Elements of Power Electronics, 2nd ed.; Oxford University Press: Oxford, UK, 2014. [Google Scholar]
- Bibian, S.; Jin, H. High performance predictive dead-beat digital controller for DC power supplies. IEEE Trans. Power Electron. 2002, 17, 420–426. [Google Scholar] [CrossRef]
- Erickson, R.; Madigan, M.; Singer, S. Design of a simple high-power-factor rectifier based on the flyback converter. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Los Angeles, CA, USA, 11–16 March 1990; pp. 792–801. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input voltage | 12 V |
| Output Voltage | 288 V |
| Peak output power | 250 W |
| Switching frequency converter | 100 kHz |
| Leakage inductor | 1.74 μH, |
| Input Boost Inductors | 200 μH, |
| Output Capacitor | 220 μF |
| Full-load | 331.77 Ω. |
| Components | Parameters |
|---|---|
| Primary Switch , | IRFB4127PbF 200 V, 76 A, 17 mΩ |
| Secondary Switch , | IPP60R125CP 650 V, 11 A, 0.125 Ω |
| Series Inductor | TDK5901PC40Z core, 3.9 μH |
| HF transformer | 3C95ETD49 ferrite core; = 5, = 45 |
| Boost Inductors | 3C95ETD49 ferrite core, , μH |
| Output Capacitor | 220 μF, 450 V electrolytic capacitor 0.68 μF, 450 V high frequency film capacitor |
| Topology | Active-Clamped | Proposed Snuberless |
|---|---|---|
| Soft-switching | ZVS (soft-switching at turn-on) | ZCS (soft-switching at turn-off) |
| Soft-switching range | Limited range (soft-switching is lost with the source voltage variation) | Full range (inherent soft-switching for the entire operating range) |
| Device voltage | Higher voltage and variable with duty cycle | Clamped at reflected output voltage and duty cycle independent |
| Boost Capability (voltage gain) | Voltage gain (boost) is compromised; 20% reduction at rated load | Natural boost gain |
| Device RMS current | Circulating current is present that increases average and RMS value | 10% reduction in the rms current due to the absence of active clamp |
| Device peak current | 1.5× input current | Same as input current (33% less) |
| Transformer current | Same as input current | Half of the input current (50% less) |
| Efficiency | High | 2% improvement |
| Power flow | Unidirectional | Bidirectional |
| Duty cycle variation | Wide range (0 to 1) | Limited (0.5 to 1) |
| Transformer | Higher turns ratio, higher kVA rating and volume | Relatively lower turns ratio, reduced kVA rating and volume (40% less) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khatun, K.; Ratnam, V.V.; Rathore, A.K.; Narasimharaju, B.L. Small-Signal Analysis and Control of Soft-Switching Naturally Clamped Snubberless Current-Fed Half-Bridge DC/DC Converter. Appl. Sci. 2020, 10, 6130. https://0-doi-org.brum.beds.ac.uk/10.3390/app10176130
Khatun K, Ratnam VV, Rathore AK, Narasimharaju BL. Small-Signal Analysis and Control of Soft-Switching Naturally Clamped Snubberless Current-Fed Half-Bridge DC/DC Converter. Applied Sciences. 2020; 10(17):6130. https://0-doi-org.brum.beds.ac.uk/10.3390/app10176130
Chicago/Turabian StyleKhatun, Koyelia, Vakacharla Venkata Ratnam, Akshay Kumar Rathore, and Beeramangalla Lakshminarasaiah Narasimharaju. 2020. "Small-Signal Analysis and Control of Soft-Switching Naturally Clamped Snubberless Current-Fed Half-Bridge DC/DC Converter" Applied Sciences 10, no. 17: 6130. https://0-doi-org.brum.beds.ac.uk/10.3390/app10176130