Determination of the Constants of GTN Damage Model Using Experiment, Polynomial Regression and Kriging Methods

Abstract
:
1. Introduction
1.1. Damage Models
1.1.1. Gurson–Tvergaard–Needleman Model
1.1.2. Johnson–Cook Damage Model
1.1.3. Rice and Tracey Model
1.1.4. Gunawardana Model
1.2. The Constants Identification Methods
1.2.1. Metallography Method
1.2.2. Numerical Methods
2. Materials and Methods
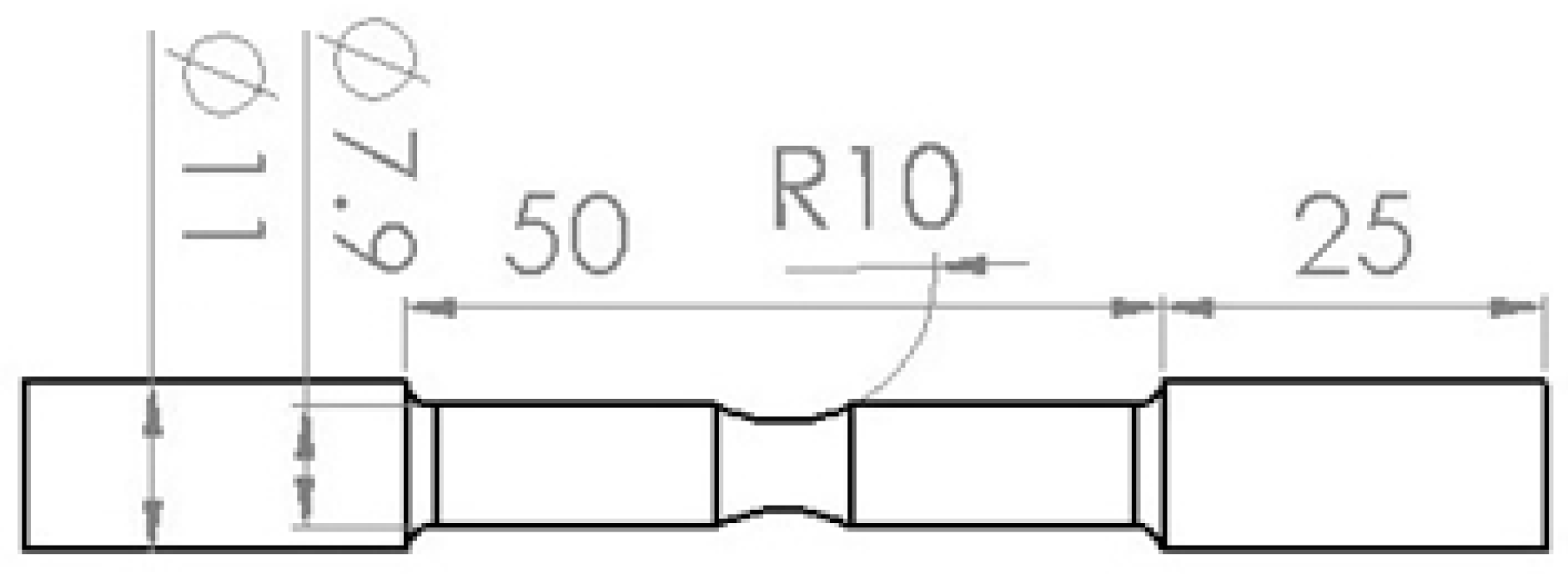
2.1. Experiments
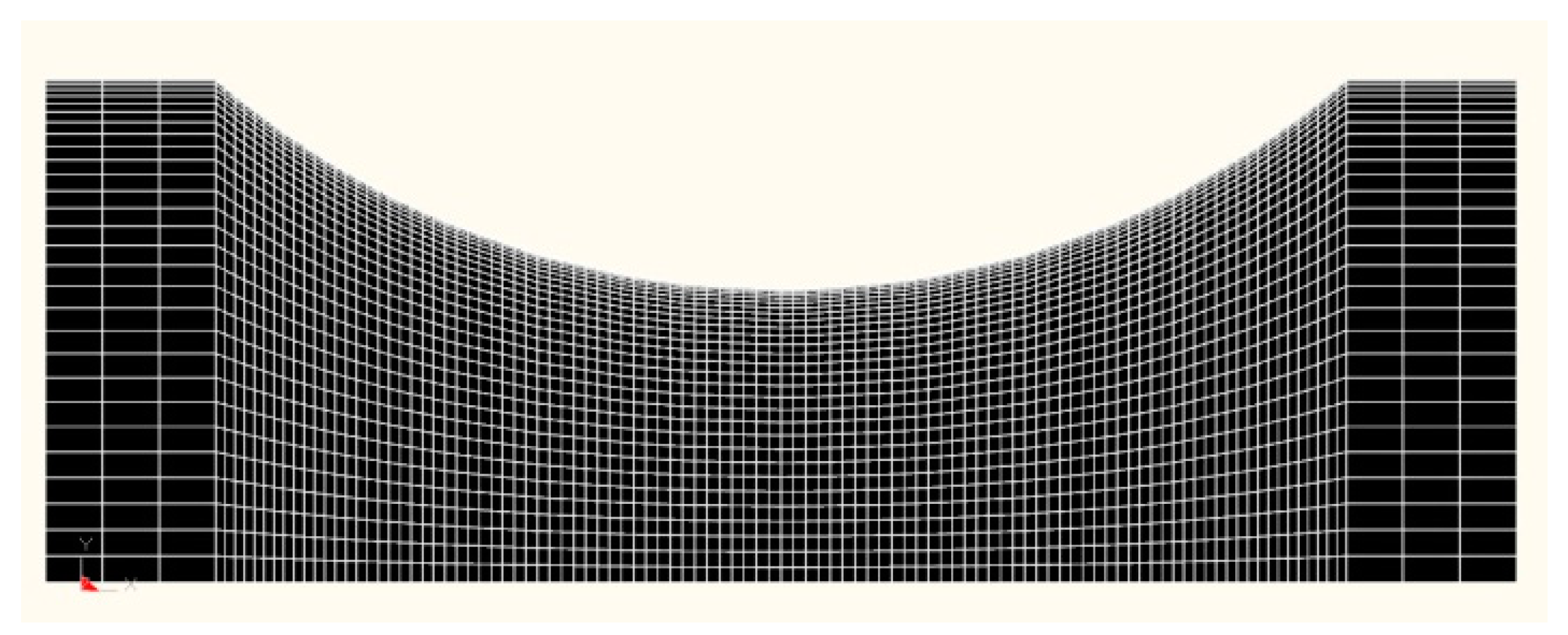
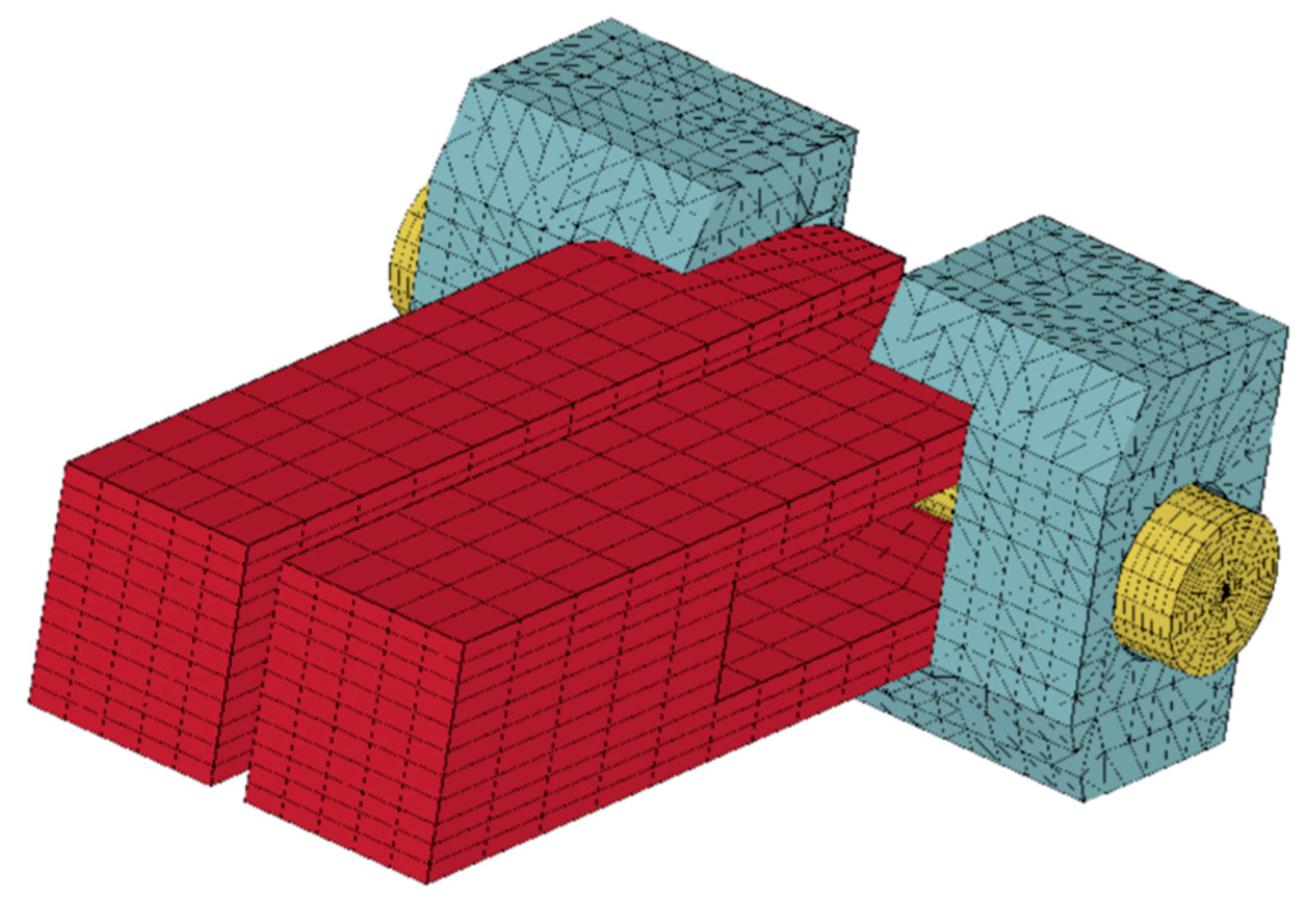
2.2. Numerical Simulations
2.2.1. Simulation of Quasi-Static Tests
2.2.2. Simulation of Dynamic Tests
2.3. Identification of the Constants of GTN Model
2.3.1. Definition of the Objective Function
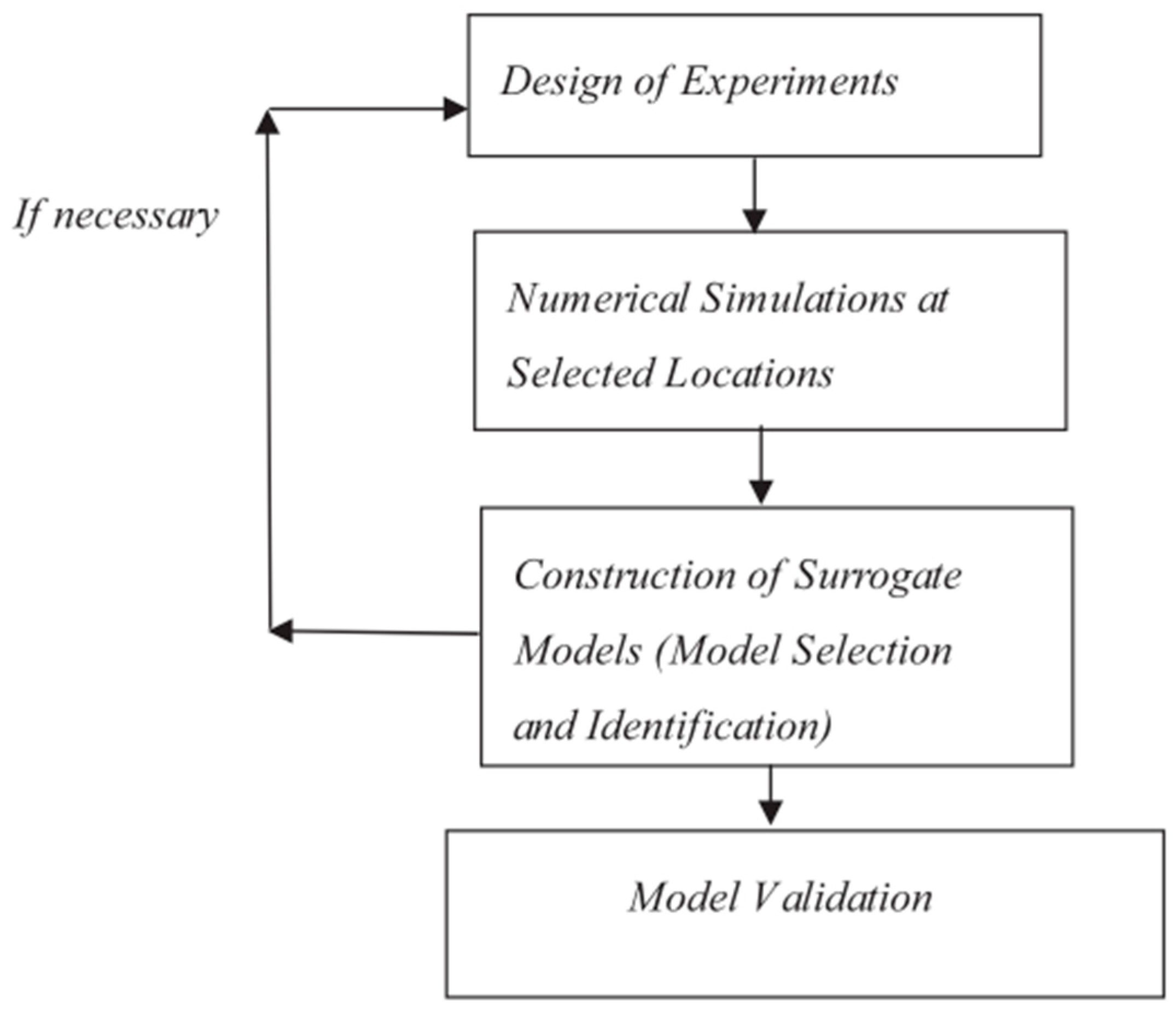
2.3.2. Surrogate-Based Optimization Method
- Selecting the initial sampling points with a design of experiments (DoE) technique
- Performing the computationally expensive FE simulation for the selected points
- Fitting the surrogate model
- Optimizing the surrogate model and finding the new set of samples and
- Repeating steps 2–4 to reach convergence.
2.3.3. Design of Experiments (DOE)
2.3.4. Polynomial Regression Method
2.3.5. Kriging Method
2.3.6. A Comparison between Kriging and Polynomial Regression Methods
3. Results
4. Sensitivity Analysis
5. Discussion
6. Conclusions
- 1
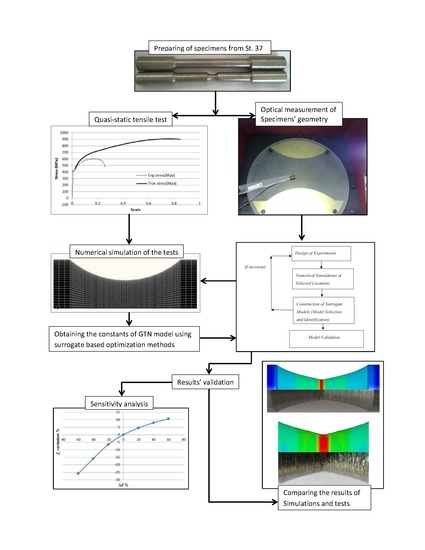
- GTN damage model involves 10 constants which are normally determined by costly and time consuming experiments. It was shown in this work that the constants can be identified using a combined experimental/numerical/optimization technique which requires only two quasi-static and dynamic tensile tests to be carried out. The profiles of the specimen after fracture are obtained using a projector. The quasi-static and dynamic tests are simulated using a finite element code and the profiles of the specimen are predicted for some sets of the constants of the damage model. The difference between the numerical and the experimental specimen profiles is defined as the objective function and is optimized using the polynomial regression and Kriging methods. The constants corresponding to the optimized objective function are the answer.
- 2
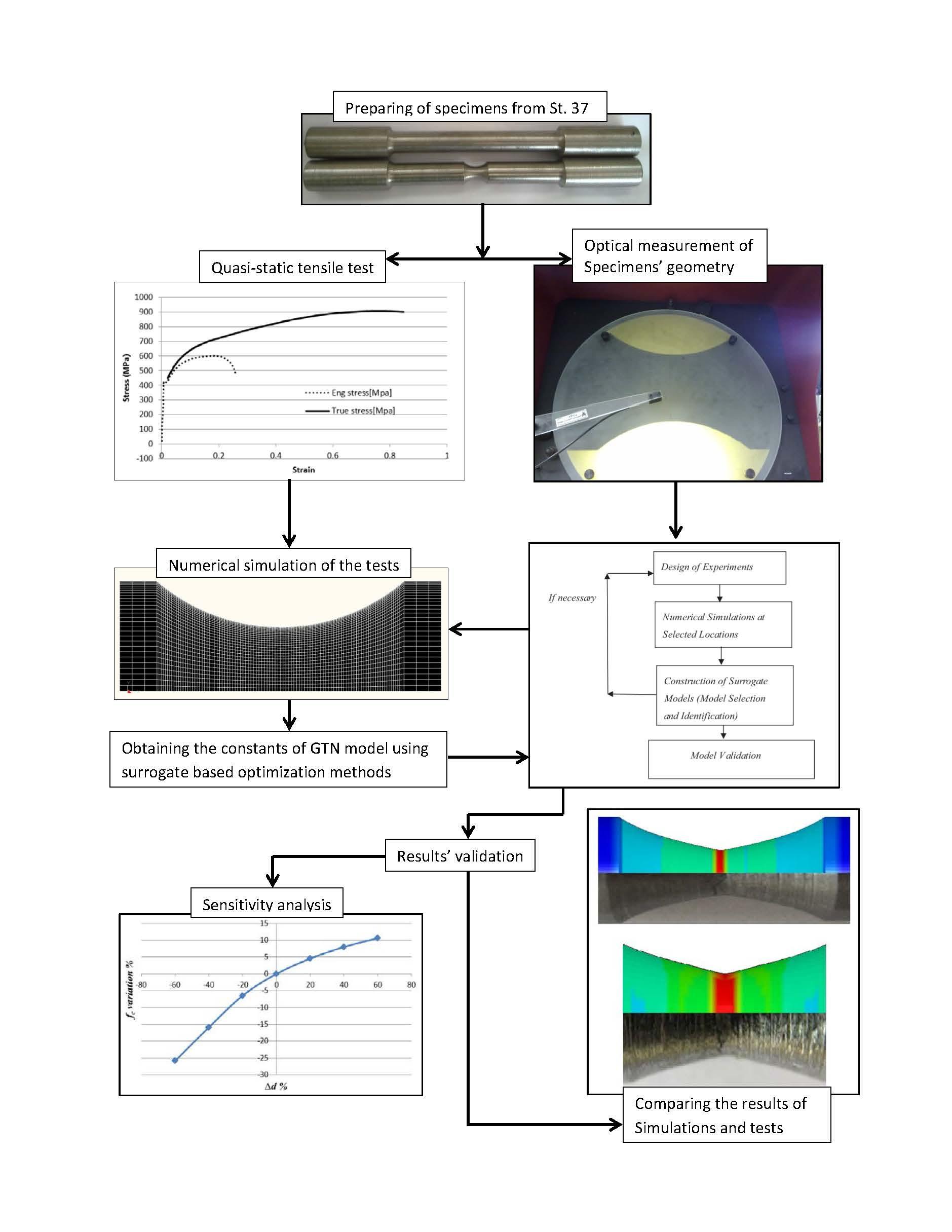
- The constants σy, εy and n of GTN model can be easily computed from the stress-strain curve obtained simply from a quasi-static tensile test.
- 3
- Kriging surrogate method is more efficient than the polynomial regression surrogate method in the sense that it provides more precise results with a smaller number of initial samples.
- 4
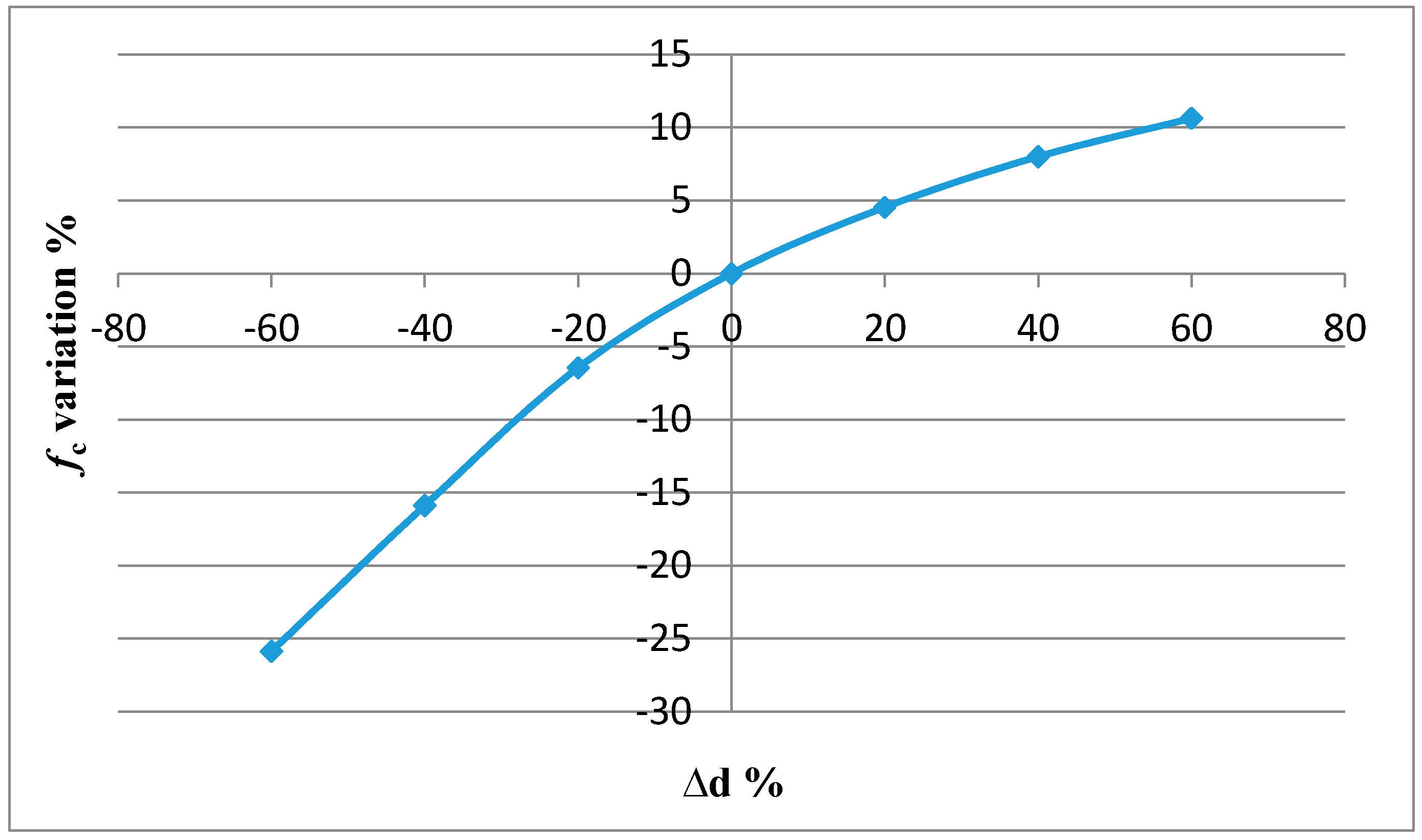
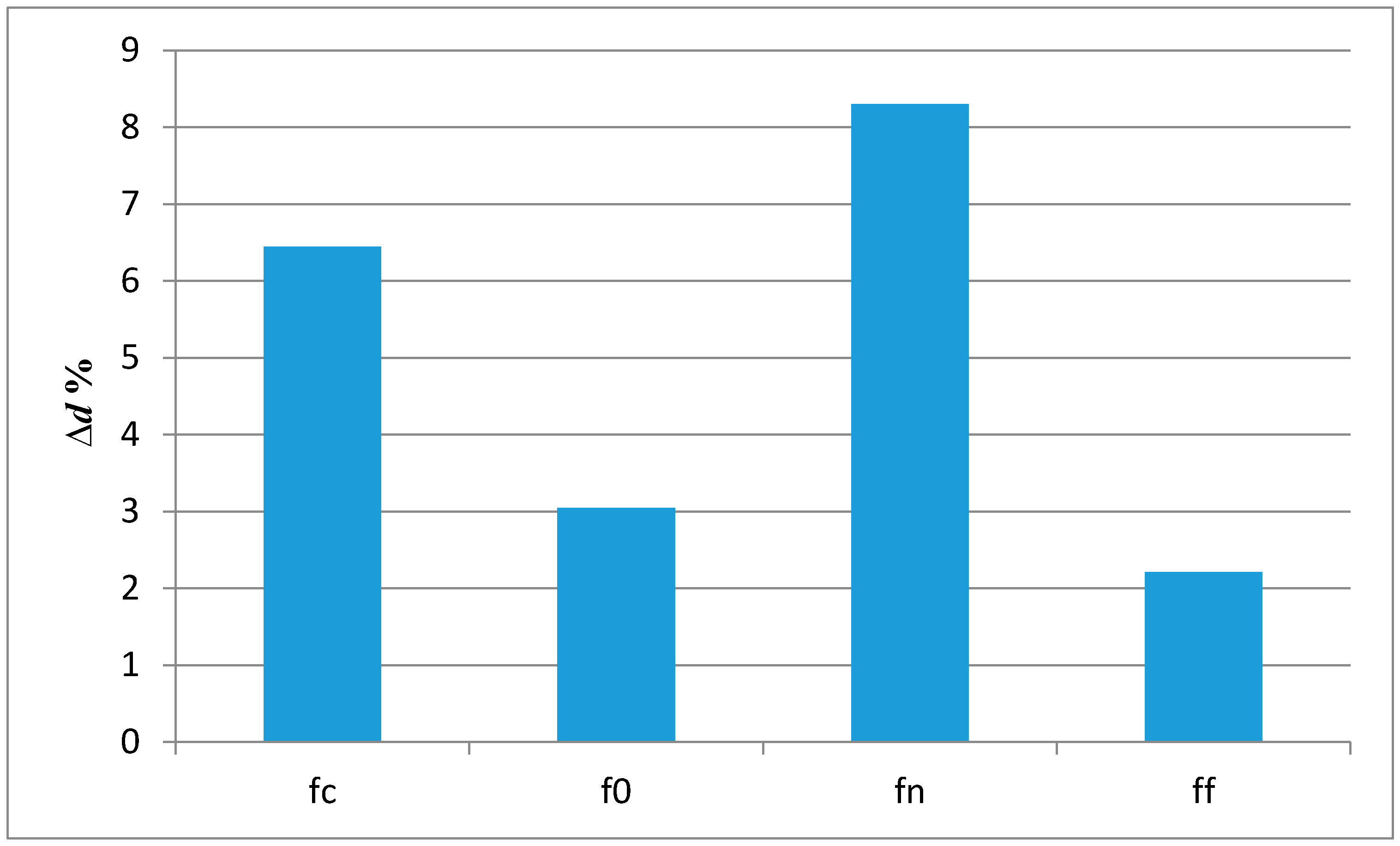
- It was shown that except for the constant fn the reduction in diameter of the specimen predicted by numerical simulation was significantly sensitive to the constants f0, fc and ff.
- 5
- Despite the fact that GTN model is an analytical method and Johnson–Cook model is an empirical method, they both provided the same accuracy in this work.
Author Contributions
Conflicts of Interest
References
- Gurson, A.L. Plastic Flow and Fracture Behavior of Ductile Materials Incorporating Void Nucleation, Growth and Interaction. Ph.D. Thesis, Brown University, Providence, RI, USA, 1975. [Google Scholar]
- Nahshon, K.; Hutchinson, J.W. Modification of the Gurson Model for shear failure. Eur. J. Mech. A/Solids 2008, 27, 1–17. [Google Scholar] [CrossRef]
- Vaz, M., Jr.; Muñoz-Rojas, P.A.; Cardoso, E.L.; Tomiyama, M. Considerations on parameter identification and material response for Gurson-type and Lemaitre-type constitutive models. Int. J. Mech. Sci. 2016, 106, 254–265. [Google Scholar] [CrossRef]
- Oh, C.K.; Kim, Y.J.; Baek, J.H.; Kim, Y.P.; Kim, W. A phenomenological model of ductile fracture for API X65 steel. Int. J. Mech. Sci. 2007, 49, 1399–1412. [Google Scholar] [CrossRef]
- Malcher, L.; Reis, F.J.P.; Andrade Pires, F.M.; César de Sá, J.M.A. Evaluation of shear mechanisms and influence of the calibration point on the numerical results of the GTN model. Int. J. Mech. Sci. 2013, 75, 407–422. [Google Scholar] [CrossRef]
- Johnson, G.R.; Cook, W.H. Fracture characteristics of three metals subjected to various strains, strain rates, temperatures and pressures. Eng. Fract. Mech. 1985, 21, 31–48. [Google Scholar] [CrossRef]
- Boyer, J.C.; Vidal-Salle, E.; Staub, C. A shear stress dependent ductile damage models. Int. J. Mater. Process. Technol. 2003, 121, 87–93. [Google Scholar] [CrossRef]
- Weck, A.; Seguarado, J.; Lorca, J.L.; Wilkinson, D. Numerical simulations of void linkage in model materials using a nonlocal ductile damage approximation. Int. J. Fract. 2007, 148, 205–219. [Google Scholar] [CrossRef] [Green Version]
- Majzoobi, G.H.; Hosseini, A.; Shahvarpour, A. An investigation into ductile fracture of ST37 Steel and pure copper at high strain rates: Part I: Experiments. Steel Res. Int. 2008, 79, 685–692. [Google Scholar]
- Majzoobi, G.H.; Hosseini, A.; Shahvarpour, A. An investigation into ductile fracture of ST37 Steel and pure copper at high strain rates: Part II: Simulation. Steel Res. Int. 2008, 79, 712–718. [Google Scholar]
- Ockewitz, A.; Sun, D.-Z. Damage modeling of automobile components of aluminum materials under crash loading. In Proceedings of the LS-DYNA Anwenderforum, Ulm, Germany, 12–13 October 2006. [Google Scholar]
- Feucht, M.; Sun, D.-Z.; Erhart, T.; Frank, T. Recent development and applications of the Gurson model. In Proceedings of the LS-DYNA Anwenderforum, Ulm, Germany, 12–13 October 2006. [Google Scholar]
- Springmann, M.; Kuna, M. Identification of material parameters of the Gurson-Tevergaard-Needleman model by combined experimental and numerical techniques. Comput. Mater. Sci. 2005, 33, 501–509. [Google Scholar] [CrossRef]
- Broggiato, G.B.; Campana, F.; Cortes, L. Parameter identification of a material damage model: Inverse approach by the use of digital image processing. In Proceedings of the 22nd DANUBIA-ADRIA Symposium of Experimental Methods in Solid Mechanics, Parma, Italy, 28 September–1 October 2005. [Google Scholar]
- Kuna, M.; Springmann, M. Determination of ductile damage parameters by local deformation fields. Damage Mech. Fract. Nano Eng. Mater. Struct. 2006, 535–536. [Google Scholar] [CrossRef]
- Majzoobi, G.H. The Experimental and Numerical Study of Mechanical Behavior of Materials. Ph.D. Thesis, University of Leeds, Leeds, UK, 1990. [Google Scholar]
- Majzoobi, G.H.; Barton, D.C.; Ramezani, M. Stress wave effects in the Flying Wedge high strain rate tensile testing device. J. Strain Anal. Eng. Des. 2007, 42, 507–516. [Google Scholar] [CrossRef]
- Majzoobi, G.H.; Saniee, F.F.; Khosroshahi, S.; Beikmohammadloo, H. Determination of materials parameters under dynamic loading. Part I: Experiments and simulations. Comput. Mater. Sci. 2010, 49, 192–200. [Google Scholar] [CrossRef]
- Majzoobi, G.H.; Saniee, F.F.; Khosroshahi, S.; Beikmohammadloo, H. Determination of materials parameters under dynamic loading. Part II, Optimization. Comput. Mater. Sci. 2010, 49, 201–208. [Google Scholar] [CrossRef]
- Jones, D.R.; Schonlau, M.; William, J. Efficient global optimization of expensive black-box functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Regis, R.G. Particle swarm with radial basis function surrogates for expensive black-box optimization. J. Comput. Sci. 2014, 5, 12–23. [Google Scholar] [CrossRef]
- Mack, Y.; Goel, T.; Shyy, W.; Haftka, R. Surrogate model-based optimization framework: A case study in aerospace design. In Evolutionary Computation in Dynamic and Uncertain Environments; Yang, S., Ong, Y.-S., Jin, Y., Eds.; Springer: Berlin, Germany, 2007; pp. 323–342. [Google Scholar]
- Holmstr, K.; Quttineh, N.; Edvall, M.M. An adaptive radial basis algorithm (ARBF) for expensive black-box mixed-integer constrained global optimization. Optim. Eng. 2008, 9, 311–339. [Google Scholar] [CrossRef]
- Han, Z.H.; Zhang, K.S. Surrogate-based optimization. In Real-World Applications of Genetic Algorithms; Roeva, O., Ed.; InTech: New York, NY, USA, 2008; pp. 343–362. [Google Scholar]
- Wang, C.; Duan, Q.; Gong, W.; Ye, A.; Di, Z.; Miao, C. An evaluation of adaptive surrogate modeling based optimization with two benchmark problems. Environ. Model. Softw. 2014, 60, 167–179. [Google Scholar] [CrossRef]
- Queipo, N.V.; Haftka, R.T.; Shyy, W.; Goel, T.; Vaidyanathan, R.; Tucker, P.K. Surrogate-based analysis and optimization. Prog. Aerosp. Sci. 2005, 41, 1–28. [Google Scholar] [CrossRef]
- Persson, J. Design and Optimization under Uncertainties a Simulation and Surrogate Model Based Approach. Ph.D. Thesis, Linkoping University, Linkoping, Sweden, 2012. [Google Scholar]
- Draper, N.R.; Smith, H. Applied Regression Analysis, 3rd ed.; Wiley: New York, NY, USA, 1998. [Google Scholar]
- Wilkins, M.L.; Streit, R.D.; Reaugh, J.E. Cumulative-Strain-Damage Model of Ductile Fracture: Simulation and Prediction of Engineering Fracture Test; UCRL-53058 Distribution Category UC-25; Lawrence Livermore Laboratory: Livermore, CA, USA; University of California: Oakland, CA, USA, 1980.
- Needleman, A.; Tvergaard, V. An analysis of ductile rupture in notched bars. J. Mech. Phys. Solids 1984, 32, 461–490. [Google Scholar] [CrossRef]
- Sun, D.Z.; Honi, A.; Bohem, W.; Shmitt, W. Application of micromechanical models to the analysis of ductile fracture under dynamic loading. Fruct. Mech. 1995, 25, 343–357. [Google Scholar]
- Abbassi, F.; Belhadj, T.; Mistou, S.; Zghal, A. Parameter identification of a mechanical ductile damage using Artificial Neural Networks in sheet metal forming. Mater. Des. 2012, 45, 605–615. [Google Scholar] [CrossRef] [Green Version]
- Bridgman, P.W. Studies in Large Plastic Flow and Fracture; Harvard University Press: Cambridge, MA, USA, 1964. [Google Scholar]
- Majzoobi, G.H.; Dehgolan, F.R. Determination of the constants of damage models. Procedia Eng. 2011, 10, 764–773. [Google Scholar] [CrossRef]
- Johnson, G.R.; Cook, W.H. A constitutive model and data for metals subjected to large strain, high strain rate and high temperature. In Proceedings of the 7th International Symposium on Ballistics, The Hague, The Netherlands, 19–21 April 1983; pp. 541–547. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Type | Δd (mm) | ΔL (mm) |
|---|---|---|
| Quasi-static | 1.675 | 1.95 |
| Dynamic | 1.36 | 1.57 |
| fc | f0 | fn | ff | Error % |
|---|---|---|---|---|
| 0.148 | 0.013 | 0.046 | 0.246 | 0.72 |
| Number of Initial Samples | Constants of GTN Damage Model | Error % | |||
|---|---|---|---|---|---|
| fc | f0 | fn | ff | ||
| 15 | 0.150 | 0.012 | 0.047 | 0.246 | 0.11 |
| 10 | 0.154 | 0.012 | 0.048 | 0.246 | 0 |
| 9 | 0.155 | 0.012 | 0.049 | 0.245 | 0.60 |
| 8 | 0.151 | 0.011 | 0.048 | 0.250 | 0.95 |
| 7 | 0.154 | 0.012 | 0.048 | 0.251 | 0.59 |
| 6 | 0.145 | 0.013 | 0.048 | 0.254 | 2.38 |
| fc | f0 | fn | ff | Error % |
|---|---|---|---|---|
| 0.154 | 0.012 | 0.048 | 0.246 | 0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahimidehgolan, F.; Majzoobi, G.; Alinejad, F.; Fathi Sola, J. Determination of the Constants of GTN Damage Model Using Experiment, Polynomial Regression and Kriging Methods. Appl. Sci. 2017, 7, 1179. https://0-doi-org.brum.beds.ac.uk/10.3390/app7111179
Rahimidehgolan F, Majzoobi G, Alinejad F, Fathi Sola J. Determination of the Constants of GTN Damage Model Using Experiment, Polynomial Regression and Kriging Methods. Applied Sciences. 2017; 7(11):1179. https://0-doi-org.brum.beds.ac.uk/10.3390/app7111179
Chicago/Turabian StyleRahimidehgolan, Foad, Gholamhossien Majzoobi, Farhad Alinejad, and Jalal Fathi Sola. 2017. "Determination of the Constants of GTN Damage Model Using Experiment, Polynomial Regression and Kriging Methods" Applied Sciences 7, no. 11: 1179. https://0-doi-org.brum.beds.ac.uk/10.3390/app7111179