Optimal Control of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect for Nanomechatronics Systems

National Research University of Electronic Technology (MIET), 124498 Moscow, Russia
Appl. Syst. Innov. 2020, 3(4), 53; https://0-doi-org.brum.beds.ac.uk/10.3390/asi3040053
Submission received: 21 May 2020
/
Revised: 25 November 2020
/
Accepted: 25 November 2020
/
Published: 1 December 2020
(This article belongs to the Collection Feature Paper Collection in Applied System Innovation)
{kind=link}
{kind=link}
Abstract
:A electroelastic engine with a longitudinal piezoeffect is widely used in nanotechnology for nanomanipulators, laser systems, nanopumps, and scanning microscopy. For these nanomechatronics systems, the transition between individual positions of the systems in the shortest possible time is relevant. It is relevant to solve the problem of optimizing the nanopositioning control system with a minimum control time. This work determines the optimal control of a multilayer electroelastic engine with a longitudinal piezoeffect and minimal control time for an optimal nanomechatronics system. The expressions of the control function and switching line are obtained with using the Pontryagin maximum principle for the optimal control system of the multilayer electroelastic engine at a longitudinal piezoeffect with an ordinary second-order differential equation of system. In this optimal nanomechatronics system, the control function takes only two values and changes once.
1. Introduction
An electroelastic actuator in the form piezo actuator is used for nanotechnology in nanomanipulators, laser systems, nanopumps, scanning microscopy [1]. The piezo actuator is used in photolithography for nano- and microdisplacements when aligning templates, in medical equipment for precise instrument delivery during microsurgical operations, in optical-mechanical devices, in adaptive optics systems, and in adaptive telescopes [2]. It is also used in stabilization systems for optical-mechanical devices, systems for alignment and tuning of lasers, interferometers, adaptive optical systems and fiber-optic systems for transmitting and receiving information [3].
The application of a multilayer electroelastic engine with a longitudinal piezoeffect is promising for nanomanipulators in nanotechnology [4]. To increase the range of the displacement, a cellular actuator and a multilayer electroelastic engine are used [5]. Mechatronics control systems with a multilayer electroelastic engine with a longitudinal piezoeffect are used in precision engineering [6].
It is important to solve the problem of positioning a multilayer electroelastic engine with a longitudinal piezoeffect from an arbitrary state with minimal control time [7] with the transition between individual positions of the optimal control system in the shortest possible time. The Pontryagin maximum principle is used to derive minimum time control. The prospects for constructing optimal control systems for nanomechatronics are shown in work [8].
In this work using the Pontryagin maximum principle for optimal systems, which ensures under optimal control the maximum of the Hamilton function and the minimum of the control time. The expression of the control function is obtained, which has only two values and changes once. The switching line is obtained for the optimal control of a multilayer electroelastic engine with a longitudinal piezoeffect in a nanomechatronics optimal system.
2. Optimal Control of a Multilayer Electroelastic Engine
2.1. Characteristics of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect
Let us consider a multilayer electroelastic engine with a longitudinal piezoeffect with one fixed face in Figure 1, where P is the polarization and 3 is the axis and is the relative deformation along axis 3 and is time. The equation for the inverse longitudinal piezoeffect [9] has the form
where is the longitudinal piezomodule, is the electric field tension along axis 3, is the elastic compliance at , and is the mechanic tension along axis 3. From the inverse longitudinal piezoeffect Equation (1), the adjusting characteristic of a multilayer electroelastic engine is found for elastic load in the form
where is the displacement of the face engine, is time, is the length of the engine, is the number of piezolayers, is the thickness of the piezolayer, the stiffness of the load, is the area of the engine, is the force, and is the voltage.
The decisions the characteristics for the piezo engine are obtained in the works [10,11,12,13,14,15,16,17]. Therefore, for the multilayer electroelastic engine at longitudinal piezoeffect the adjusting characteristic has the following form:
where and are the stiffness of the multilayer electroelastic engine with a longitudinal piezoeffect and the transfer coefficient, respectively. The multilayer piezo engine with a longitudinal piezoeffect from a ceramic PZT at = 4 × 10−10 m/V, = 5, = 12 × 107 N/m, = 0.6 ×·107 N/m, = 100 V results in = 1.9 nm/V and = 190 nm.
In a control system the fransfer function multilayer electroelastic engine with a longitudinal piezoeffect is determined in the form
where and are Laplace displacement and voltage in Figure 1, is the transformation operator, is the electrical constant time of the multilayer electroelastic engine, is the capacitance of the multilayer electroelastic engine, and is the matching circuit resistance. For the multilayer piezo engine with a longitudinal piezoeffect from a ceramic PZT at = 10 kOm and = 0.5 μF, the electrical constant time is = 5 ms.
Let us consider the multilayer electroelastic engine with a longitudinal piezoeffect and the electrical constant time is much larger than the mechanical constant time [10] of the multilayer engine at an elastic inertial load:
where and are the mechanical constant time of the engine at an elastic inertial load and the mass of the load, respectively. For the multilayer piezo engine with a longitudinal piezoeffect from a ceramic PZT at an elastic inertial load = 0.3 kg, = 12 × 107 N/m, and = 0.6 ×·107 N/m, the mechanical constant time is = 0.05 ms.
Let us consider the optimal control system with the integrator in a series with the multilayer electroelastic engine with a longitudinal piezoeffect. In this optimal control system, the integrator transfer function has the form
where is the transfer coefficient of the integrator.
Accordingly, for the control system with the integrator for the multilayer electroelastic engine with a longitudinal piezoeffect, considering the electrical constant time of the multilayer electroelastic engine and the transfer coefficient of the integrator, the ordinary second-order differential equation is written as
where , , and are the displacement, the voltage, and transfer coefficient of the control system of the multilayer electroelastic engine with a longitudinal piezoeffect, respectively.
For the ordinary second-order differential Equation (6), therefore, the system of differential equations in Cauchy form is obtained,
where and as the state variables are selected the displacement and the velocity of the multilayer electroelastic engine with a longitudinal piezoeffect.
2.2. Application of Pontryagin Maximum Principle for Decision Optimal Control of a Multilayer Electroelastic Engine
Using the Pontryagin maximum principle [18], the control law ensures the transition of the multilayer electroelastic engine from any initial state to a given end point at a minimum time. The end point is the origin of coordinates. The Hamilton function for this maximum principle has the following form
where and are the functions.
Therefore, for the Hamilton function [19], the system of equations has the form
The solution to this system of equations has the form
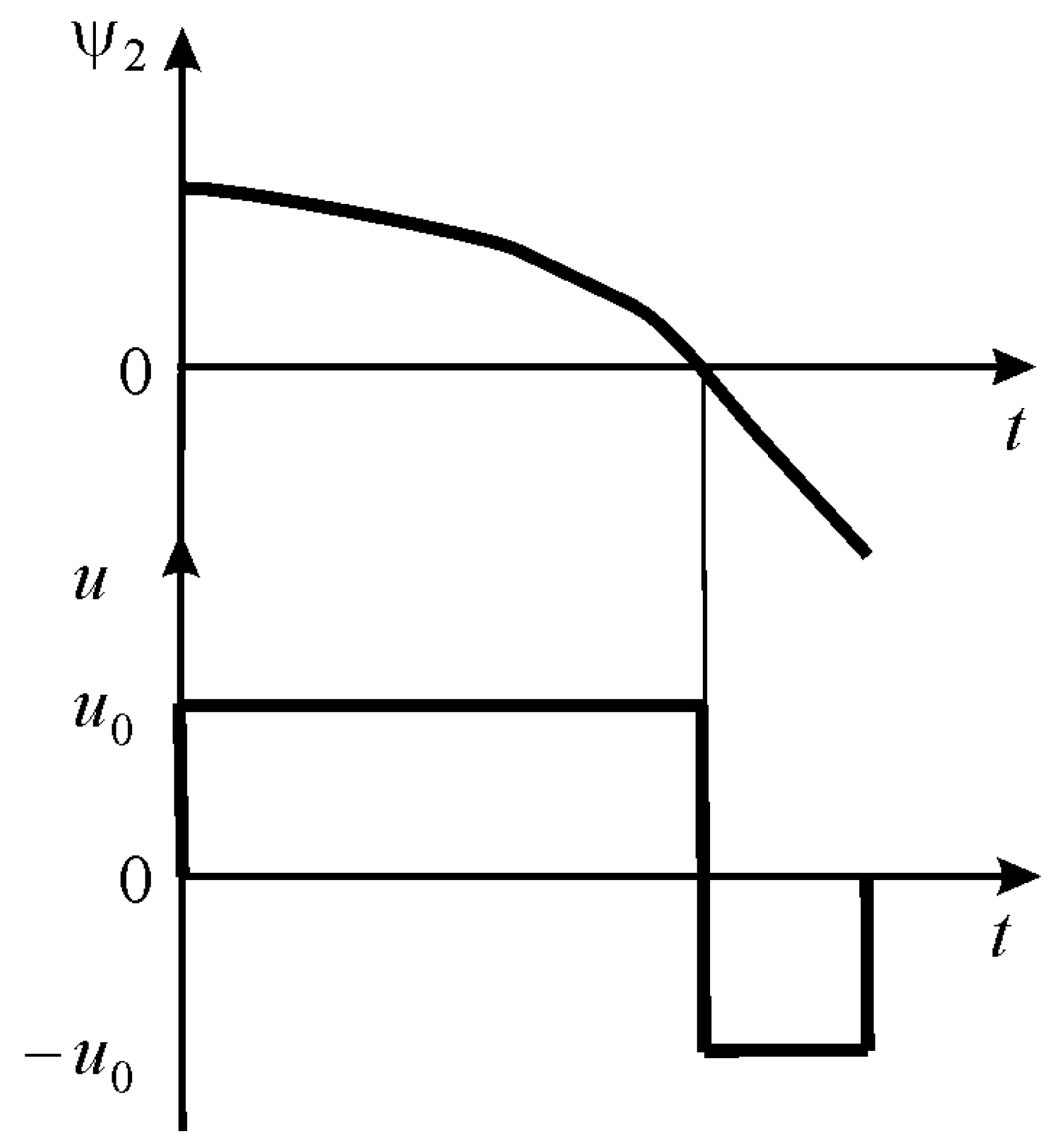
Therefore, the function changes once the sign (see Figure 2), since the straight line and the exponent intersect once. According to the maximum principle, from (9) the control signal has two values, which equal in absolute value and opposite in the sign. The sign of the control signal coincides with the sign of this function on Figure 2. The control function has the form
where is the control signal amplitude.
In this optimal system with an ordinary second-order differential equation, in Figure 2, takes only two values, and , and changes once.
The trajectory of the control system of the multilayer electroelastic engine with a longitudinal piezoeffect in the phase plane consists of two sections, the initial and the final, with the latter passing through the origin and acts as the switching line. The switching line of the multilayer electroelastic engine is defined on the phase plane.
The solution for the system of Equation (8) for has the form
when the initial location of the system is at the origin and when the time is , the constants are found in the form
then, the system of equations is determined in the form
From (15), the equation has the form
Accordingly, the time is found in the form
At the parameters = 0 and = 0, the time is obtained .
Therefore, the equation for the final portion of the movement trajectory of the multilayer electroelastic engine with a longitudinal piezoeffect is obtained on the phase plane in the form of the switching line:
From (8), the control function is found in the form
The switching line or the last section of the trajectory divides the phase plane into two regions at and , When each area of management is constant, a change in the control occurs at . Accordingly, we choose a control for each region so that the point on the phase plane moves toward the switching line.
Then we obtain the expression (19) for the equation into Equation (18) for the last section of the movement trajectory of the multilayer electroelastic engine with a longitudinal piezoeffect. Accordingly, the equation for the last section of the movement trajectory is obtained in the following form:
Therefore, the equation for the last section of the trajectory has the form
Then the inequality is obtained in the form
Therefore, the inequality is written as
Substituting expression (21) for the function into expression (23) and considering system (8), the condition has the form
The second term of expression (24) depends on the control. Accordingly, condition (24) is satisfied under the control of the form
Therefore, in this system with an ordinary second-order differential equation, the optimal control takes only two values and changes once. The expressions of the control function and switching line are obtained with using the Pontryagin maximum principle for the optimal control system of the multilayer electroelastic engine at a longitudinal piezoeffect with an ordinary second-order differential equation of system.
3. Conclusions
The optimal control of the multilayer electroelastic engine with a longitudinal piezoeffect and a minimal control time is obtained for nanomechatronics systems. The expressions of the control function and switching line on the phase plane are determined for the optimal control of this multilayer electroelastic engine. Using the Pontryagin maximum principle, the control law is obtained for the transition of the multilayer electroelastic engine from any initial state to a given end point in a minimal amount of time. The optimal control of the multilayer electroelastic engine with an ordinary second-order differential equation takes only two values and changes once.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Uchino, K. Piezoelectric Actuator and Ultrasonic Motors; Kluwer Academic Publisher: Boston, MA, USA, 1997; 347p. [Google Scholar]
- Afonin, S.M. Absolute stability conditions for a system controlling the deformation of an elecromagnetoelastic transduser. Dokl. Math. 2006, 74, 943–948. [Google Scholar] [CrossRef]
- Afonin, S.M. Structural-parametric model and transfer functions of electroelastic actuator for nano- and microdisplacement. In Piezoelectrics and Nanomaterials: Fundamentals, Developments and Applications; Parinov, I.A., Ed.; Nova Science: New York, NY, USA, 2015; Chapter 9; pp. 225–242. [Google Scholar]
- Afonin, S.M. A structural-parametric model of electroelastic actuator for nano- and microdisplacement of mechatronic system. In Advances in Nanotechnology; Bartul, Z., Trenor, J., Eds.; Nova Science: New York, NY, USA, 2017; Chapter 8; Volume 19, pp. 259–284. [Google Scholar]
- Schultz, J.; Ueda, J.; Asada, H. Cellular Actuators; Butterworth-Heinemann Publisher: Oxford, UK, 2017; 382p. [Google Scholar]
- Karpelson, M.; Wei, G.-Y.; Wood, R.J. Driving high voltage piezoelectric actuators in microrobotic applications. Sens. Actuators A 2012, 176, 78–89. [Google Scholar] [CrossRef]
- Belfiore, N.P. Micromanipulation: A Challenge for Actuation. Actuators 2018, 7, 85. [Google Scholar] [CrossRef] [Green Version]
- Bonciani, G.; Biancucci, G.; Fioravanti, S.; Valiyev, V.; Binni, A. Learning Micromanipulation, Part 2: Term Projects in Practice. Actuators 2018, 7, 56. [Google Scholar] [CrossRef] [Green Version]
- Berlincourt, D.A.; Curran, D.R.; Jaffe, H. Piezoelectric and piezomagnetic materials and their function in transducers. In Physical Acoustics: Methods and Devices. Volume 1. Part A; Mason, W.P., Ed.; Academic Press: New York, NY, USA, 1964; Chapter 3; pp. 169–270. [Google Scholar]
- Afonin, S.M. Structural-parametric model and diagram of a multilayer electromagnetoelastic actuator for nanomechanics. Actuators 2019, 8, 52. [Google Scholar] [CrossRef] [Green Version]
- Afonin, S.M. Structural-parametric model electromagnetoelastic actuator nanodisplacement for mechatronics. Int. J. Phys. 2017, 5, 9–15. [Google Scholar] [CrossRef]
- Afonin, S.M. Block diagrams of a multilayer piezoelectric motor for nano- and microdisplacements based on the transverse piezoeffect. J. Comput. Syst. Sci. Int. 2015, 54, 424–439. [Google Scholar] [CrossRef]
- Afonin, S.M. Structural-parametric model of electromagnetoelastic actuator for nanomechanics. Actuators 2018, 7, 6. [Google Scholar] [CrossRef] [Green Version]
- Afonin, S.M. Structural parametric model of a piezoelectric nanodisplacement transduser. Dokl. Phys. 2008, 53, 137–143. [Google Scholar] [CrossRef]
- Afonin, S.M. A block diagram of electromagnetoelastic actuator nanodisplacement for communications Systems. Trans. Netw. Commun. 2018, 6, 1. [Google Scholar] [CrossRef]
- Afonin, S.M. Structural-parametric model multilayer electromagnetoelastic actuator for nanomechatronics. Int. J. Phys. 2019, 7, 50–57. [Google Scholar] [CrossRef] [Green Version]
- Afonin, S.M. Decision matrix equation and block diagram of multilayer electromagnetoelastic actuator micro and nanodisplacement for communications systems. Trans. Netw. Commun. 2019, 7, 11–21. [Google Scholar] [CrossRef]
- Pontryagin, L.S.; Boltyanskii, V.G.; Gamkrelidze, R.V.; Mishchenko, E.F. The Mathematical Theory of Optimal Processes; Interscience Publishers John Wiley & Sons, Inc.: New York, NY, USA; London, UK, 1962; 360p. [Google Scholar]
- Gamkrelidze, R.V. Discovery of the maximum principle. J. Dyn. Control Syst. 1999, 5, 437–451. [Google Scholar] [CrossRef]
Figure 1.
The kinematic scheme of a multilayer electroelastic engine with a longitudinal piezoeffect.
Figure 1.
The kinematic scheme of a multilayer electroelastic engine with a longitudinal piezoeffect.

Figure 2.
The control function in the optimal system.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Afonin, S.M. Optimal Control of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect for Nanomechatronics Systems. Appl. Syst. Innov. 2020, 3, 53. https://0-doi-org.brum.beds.ac.uk/10.3390/asi3040053
AMA Style
Afonin SM. Optimal Control of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect for Nanomechatronics Systems. Applied System Innovation. 2020; 3(4):53. https://0-doi-org.brum.beds.ac.uk/10.3390/asi3040053
Chicago/Turabian StyleAfonin, Sergey M. 2020. "Optimal Control of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect for Nanomechatronics Systems" Applied System Innovation 3, no. 4: 53. https://0-doi-org.brum.beds.ac.uk/10.3390/asi3040053