The data were first analyzed in the Cartesian coordinate system for all navigational quadrants, and subsequently for each navigational quadrant separately. A combined circular and linear analyses in polar coordinate system are presented as follows.
3.1. Quadrantal Analysis in the Cartesian Coordinate System
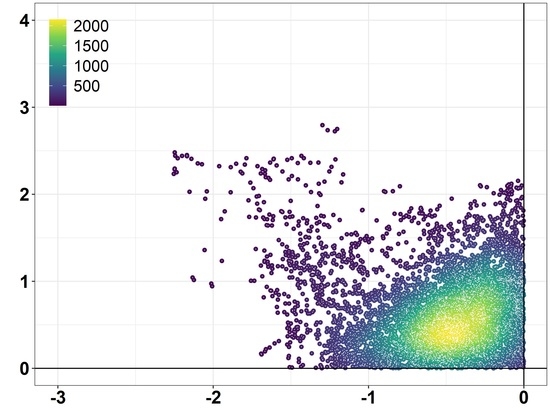
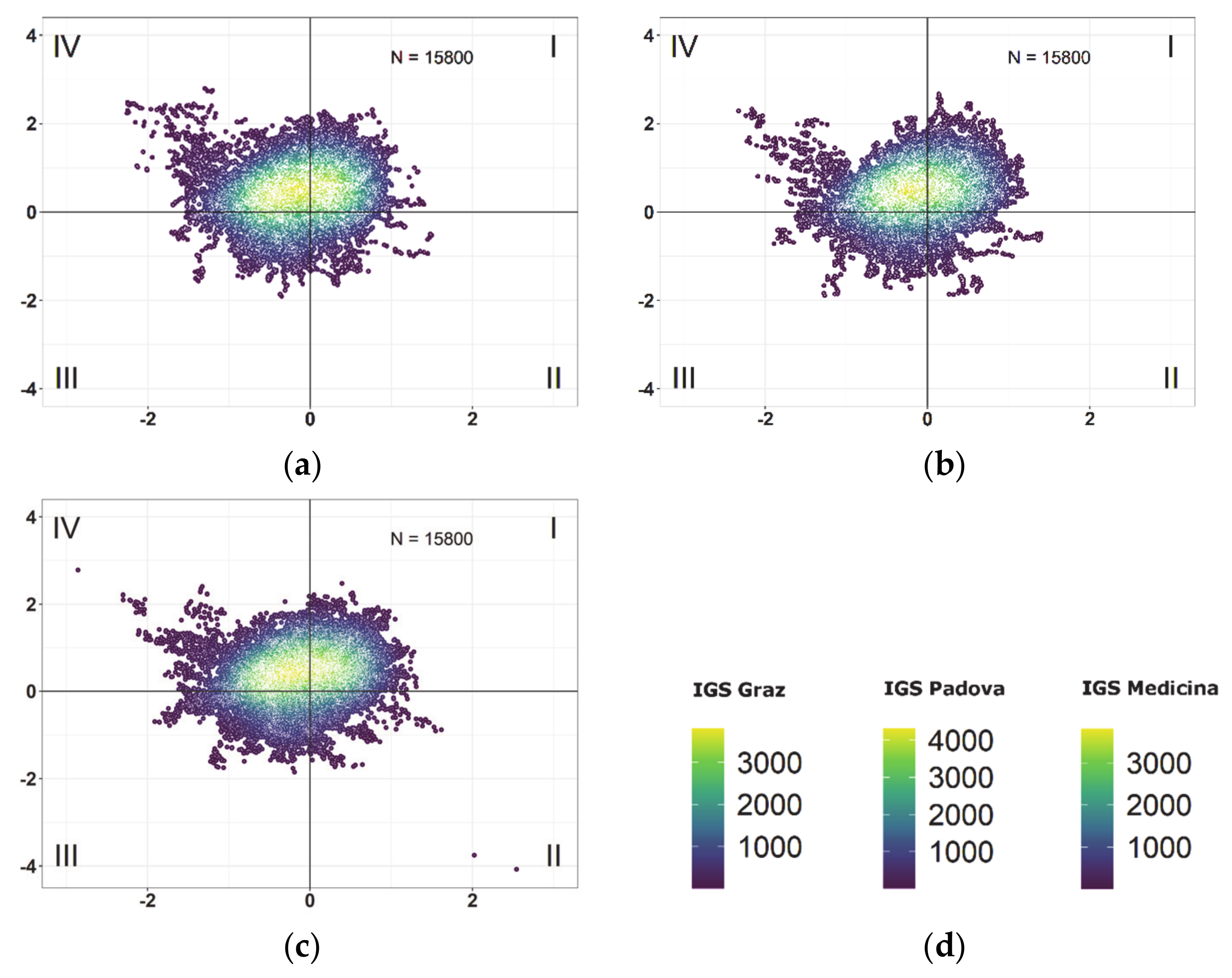
Positions (deviations) were distributed unevenly between the northern (I, IV) and the southern quadrants (II, III), with higher density in northward direction. The latitude and longitude spread, and the range can be seen in
Figure 4.
The highest distribution density was present in the navigational quadrant IV, as observed on all locations. The position spread was mostly elliptical, extending roughly longitudinally from coordinate origin towards E and W to the navigational quadrants I and IV. There was a prominent northwest (NW) arm extending from the origin to the NW corner of the navigational quadrant IV, observable in all distributions. Generally, the most compact distribution shape was present at IGS Graz. The density scale on respective figures is relative to each station positioning deviation distributions.
Statistical summary for all four navigational quadrants was termed as the
full circle summary. The ranges and Inter Quartile Ranges (IQR) were approximately similar for all deviations, with the exception of latitude range for IGS Medicina (
Table 3). The value was the single largest latitude error of 4.07 m, being an outlier falling below the lower outer fence (Q1 − 3 × IQR). Abbreviations Q1 and Q3 denote Quartile 1 and Quartile 3, while SD stands for Standard Deviation.
Conversely, individual latitude and longitude deviation median, mean and standard deviation values were similar. Moreover, median and mean values were relatively close, indicating approximate symmetry.
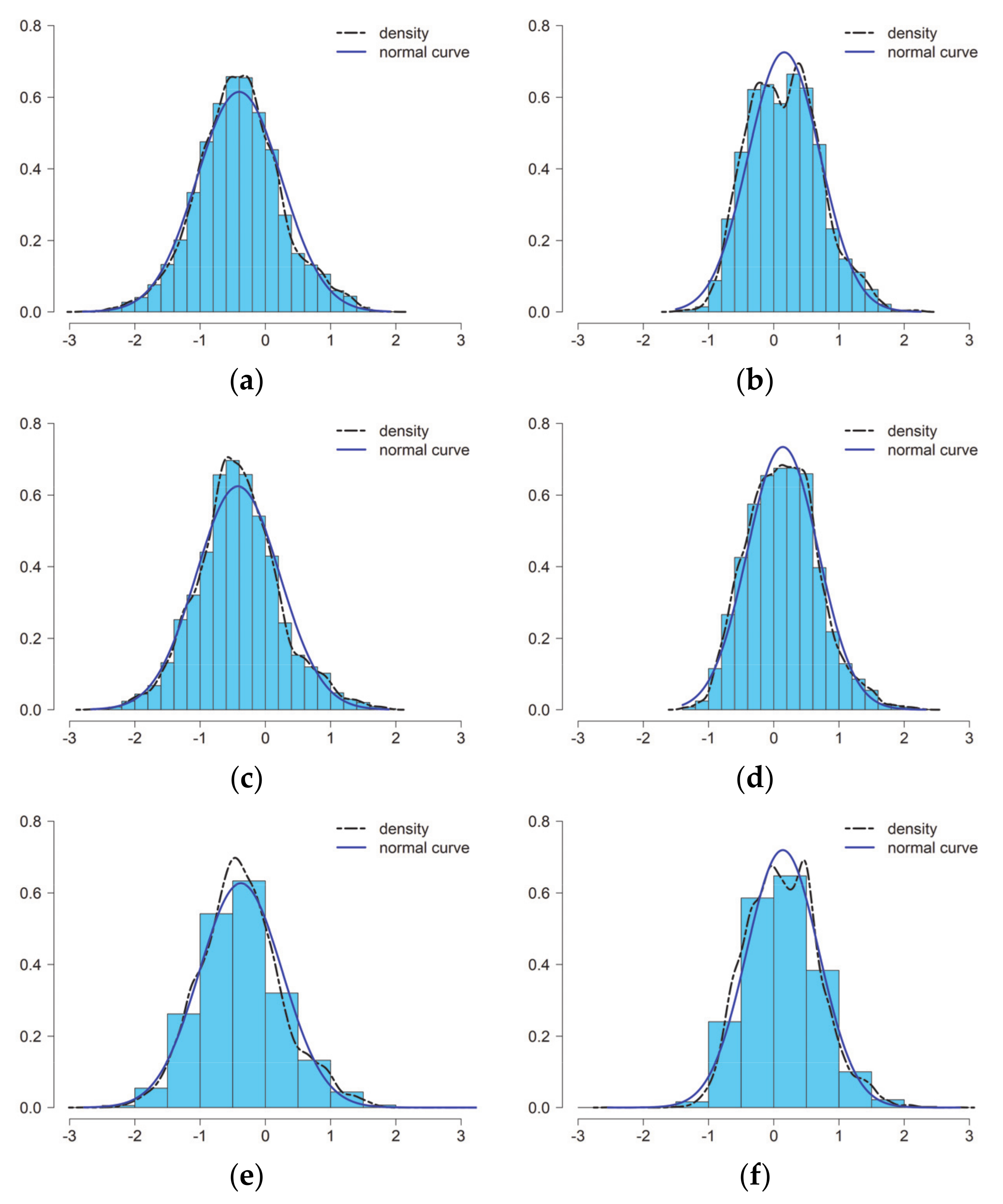
The underlying distributions were assessed with results presented in
Figure 5.
Both latitude and longitude deviations follow a roughly normal distribution with a certain departure from normality. Although visual assessment of histogram supports an approximation of normality, skewness and tails are also evident. Likewise, some flatness and irregularities of the longitude deviations, higher peaks of the latitude deviations, compared to normal distribution are observed.
The distributions were analyzed by using quantile-quantile (Q-Q) plots, on which departures from normality in tails of the distributions were visible. To further assess the distributions, kurtosis and skewness values were calculated, as presented in
Table 4.
Skewness and kurtosis are third and fourth moments of a distribution after location and variability. Kurtosis indicates tailedness or tail extremity of the distribution [
34], with higher values indicating outliers. Kurtosis value for standard normal distribution is 3, however sometimes it is stated as 0 because the value of 3 is subtracted. This is referred as the excess kurtosis. Skewness indicates departure from distribution symmetry, with value of 0 for the standard normal distribution.
Besides observational techniques and descriptive analysis, normality can be assessed with formal tests, such as Anderson-Darling, Kolmogorov–Smirnov, or Shapiro-Wilk, to name a few. The results and acceptance of null hypothesis of normality are method and sample size dependent. With large sample size or even whole datasets analysis, the hypothesis of normality is commonly rejected [
35]. This was the case with the presented data since the whole dataset was analyzed instead of random sampling. The skewness and kurtosis values were also used to assess normality, as it is presented in Reference [
36]. Skew values larger than 2 and kurtosis values larger than 7 can be considered as substantial departure from normality. As presented in
Table 4 and in
Figure 5, latitude and longitude deviation distributions are not substantially non-normal. Finally, correlation was assessed using Pearson’s correlation between latitude and longitude deviations resulting with very weak positive correlation results of 0.11 for IGS Graz, 0.16 for IGS Padova, and 0.16 for IGS Medicina. This was carried out to assess the randomness and uncorrelation assumption required for the candidate Rayleigh distribution. The obtained results are lower than the correlation values of simulated latitude and longitude errors in Reference [
6].
After the
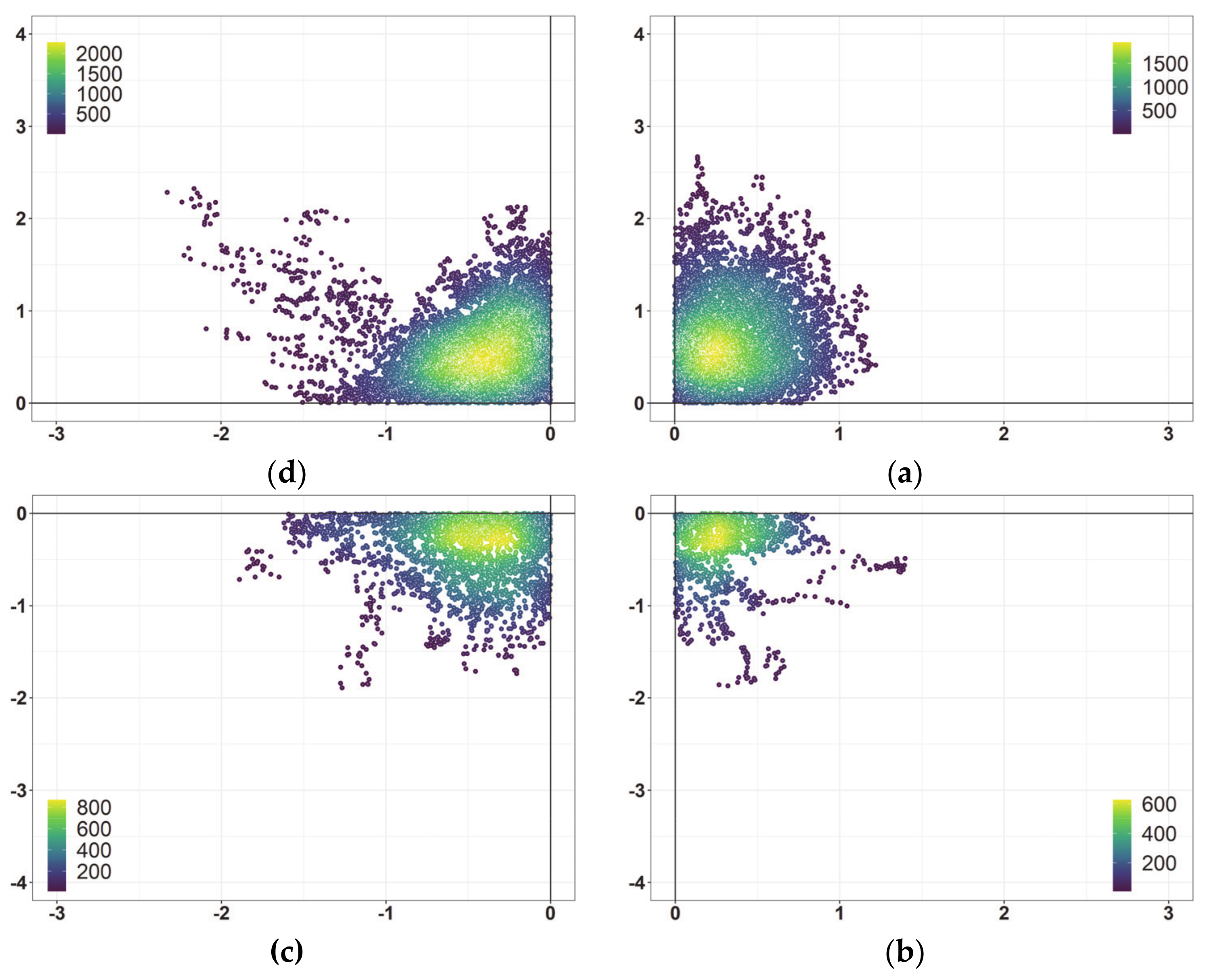
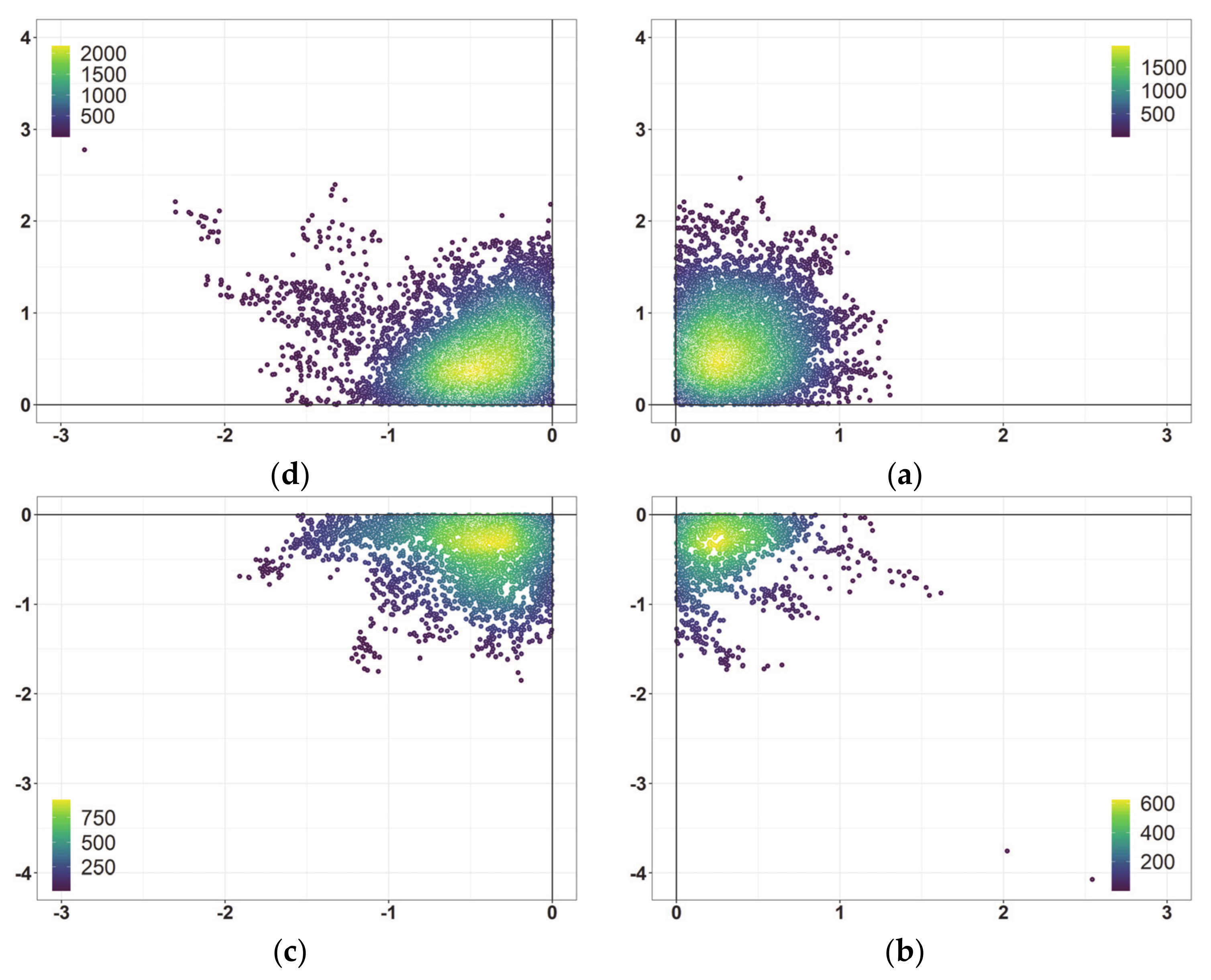
full circle analysis, the data in each navigational quadrant were evaluated as subsets. Again, the previously observed spread from all navigational quadrants is noticeable extending in roughly longitudinal E to W direction. The observables distribution and navigational quadrant unevenness was investigated further. Positioning deviations values in quadrantal subsets are presented in
Table 5 and
Figure 6,
Figure 7 and
Figure 8. For consistency with
full circle analysis, coordinate origins of each individual navigational quadrant were the same (0,0). Furthermore, summary statistics for individual quadrants are expressed as relative values, being either positive or negative (+/−) depending on the quadrant. This must be considered when interpreting the statistical summary results in
Table 3 and
Table 5, for example, maximum and minimum.
The greatest number of deviated positions is placed in the navigational quadrant IV, followed by the navigational quadrant I, the navigational quadrant III, and, finally, the navigational quadrant II. Furthermore, observing the relative densities, the highest density areas are more elliptical in the navigational quadrants III and IV. The highest density areas in the navigational quadrants I and II are of a more compact shape.
Table 5 shows the statistical summary for individual navigational quadrants. The highest absolute latitude median values were placed in the navigational quadrants I and IV, while the highest longitude median values were placed in the navigational quadrants III and IV, being the same as for the mean values. Latitude IQR is the highest in the navigational quadrants I and IV and the lowest in the navigational quadrant II, although the IQR value for Medicina in the navigational quadrant II is higher.
3.2. Linear Statistics Analysis
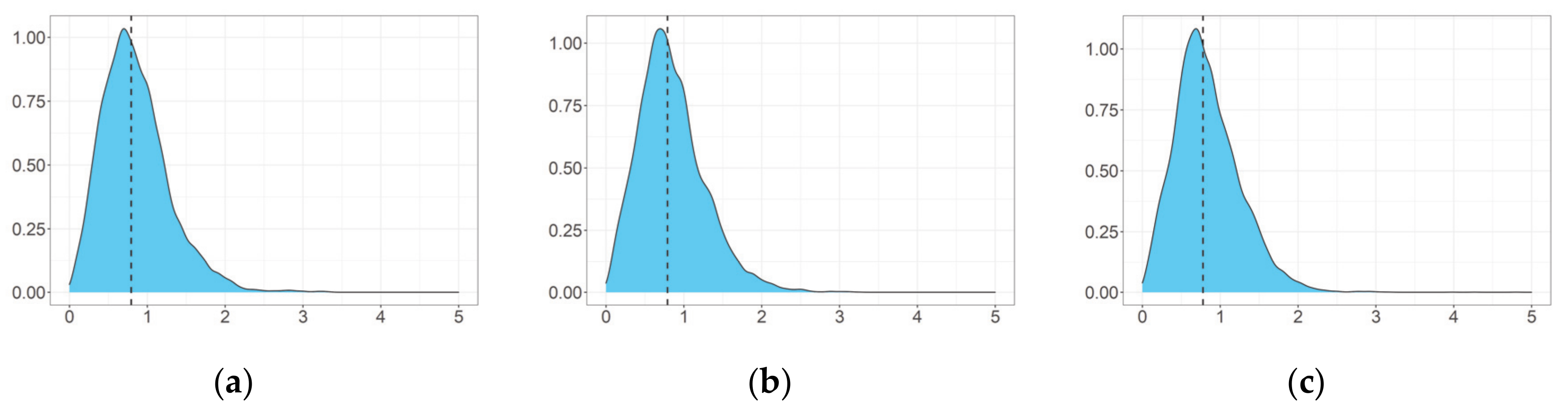
This section presents the results of radius distribution linear analysis. The obtained radius value is the error magnitude from the origin or the zero value. The radius distributions of the observed IGS stations are presented in
Figure 9.
As stated above, the radius value was calculated from two independent and uncorrelated variables of latitude and longitude deviations. The result was a joint distribution from univariate latitude and longitude deviations. The radius distribution is, therefore, a cumulative distribution of the latitude and longitude deviation distributions.
Table 6 presents the statistical summary for linear radius values.
As presented, the orthogonal latitude and longitude coordinate distributions were approximately normal. Taking this into consideration, Rayleigh distribution is commonly stated as the underlying position deviation distribution [
37] or as sufficient approximation [
38].
Rayleigh distribution is a special case of Weibull distribution with shape value of 2. Among others, it is also related to gamma distribution. For the linear radius error, Rayleigh distribution was assumed, given that the component variables are random and uncorrelated [
39].
In some cases, the position distribution can be approximated as a normal circular distribution [
5]. In Reference [
40], assumptions for Rayleigh distribution were evaluated, due to inequality of easting and northing errors and because of poor satellite visibility at higher latitudes. Likewise, in the same study, notions of GPS positioning error normality were discussed. Here, evaluation and analysis of GPS positioning errors confirmed the Rayleigh distribution approximation [
40].
Rayleigh, Weibull, gamma, and normal distributions were evaluated in Reference [
41], where gamma distribution was proposed as the best possible fit.
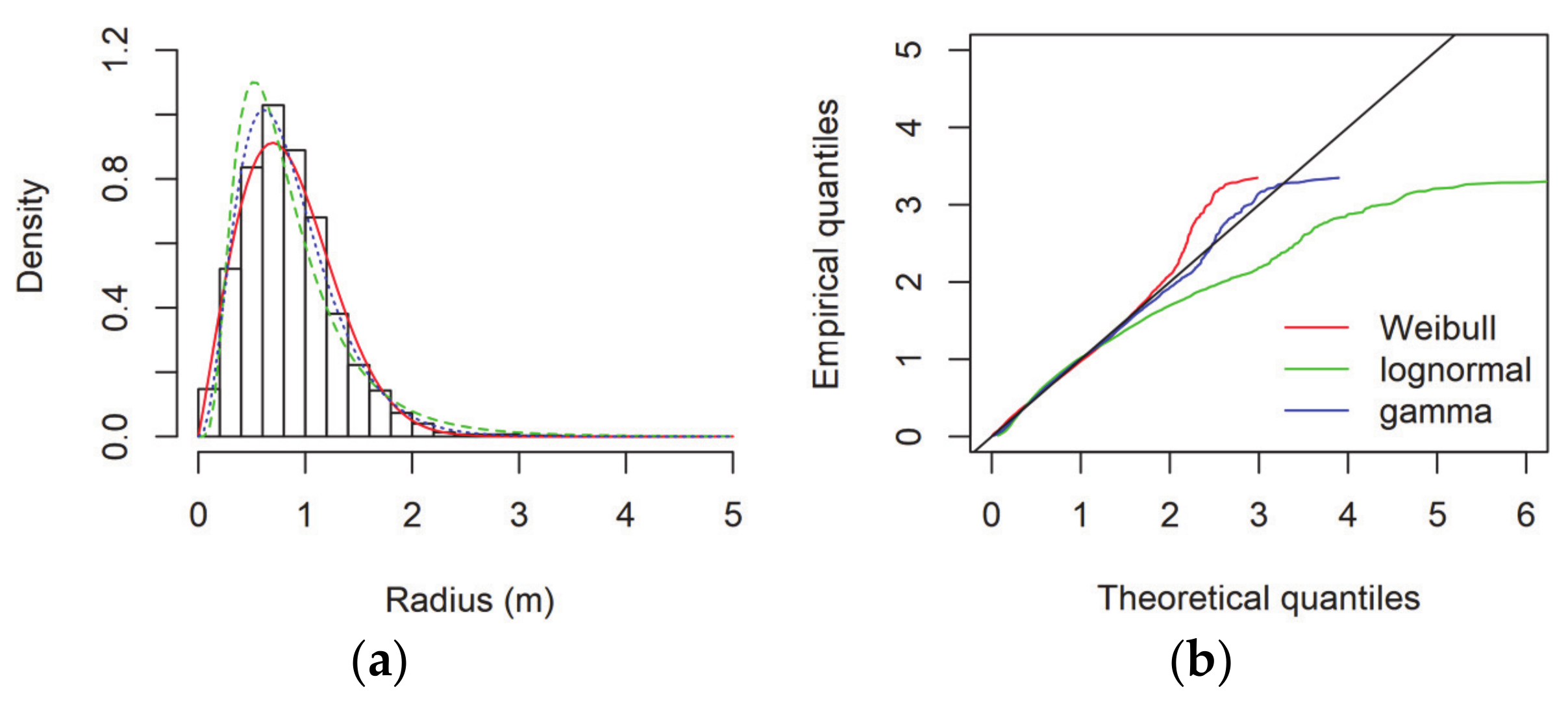
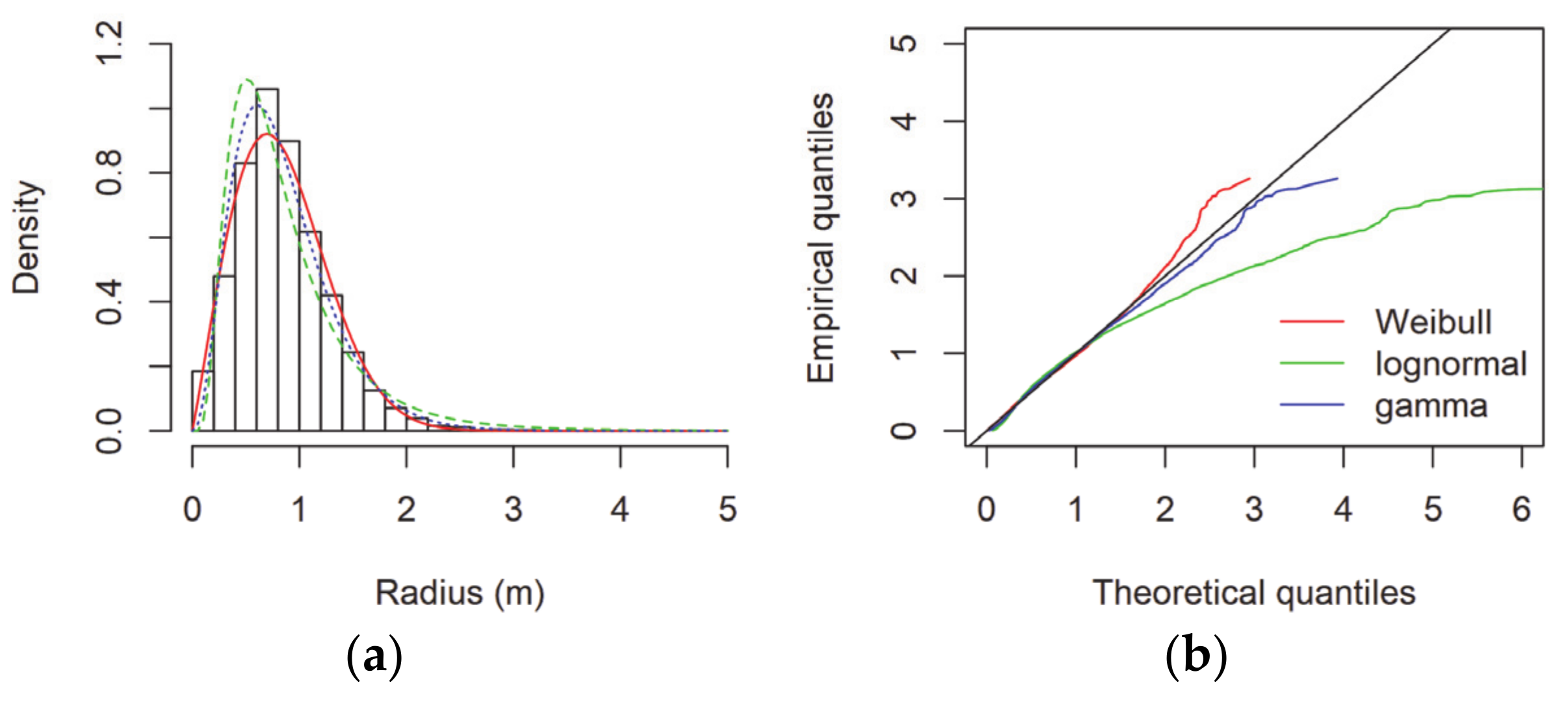
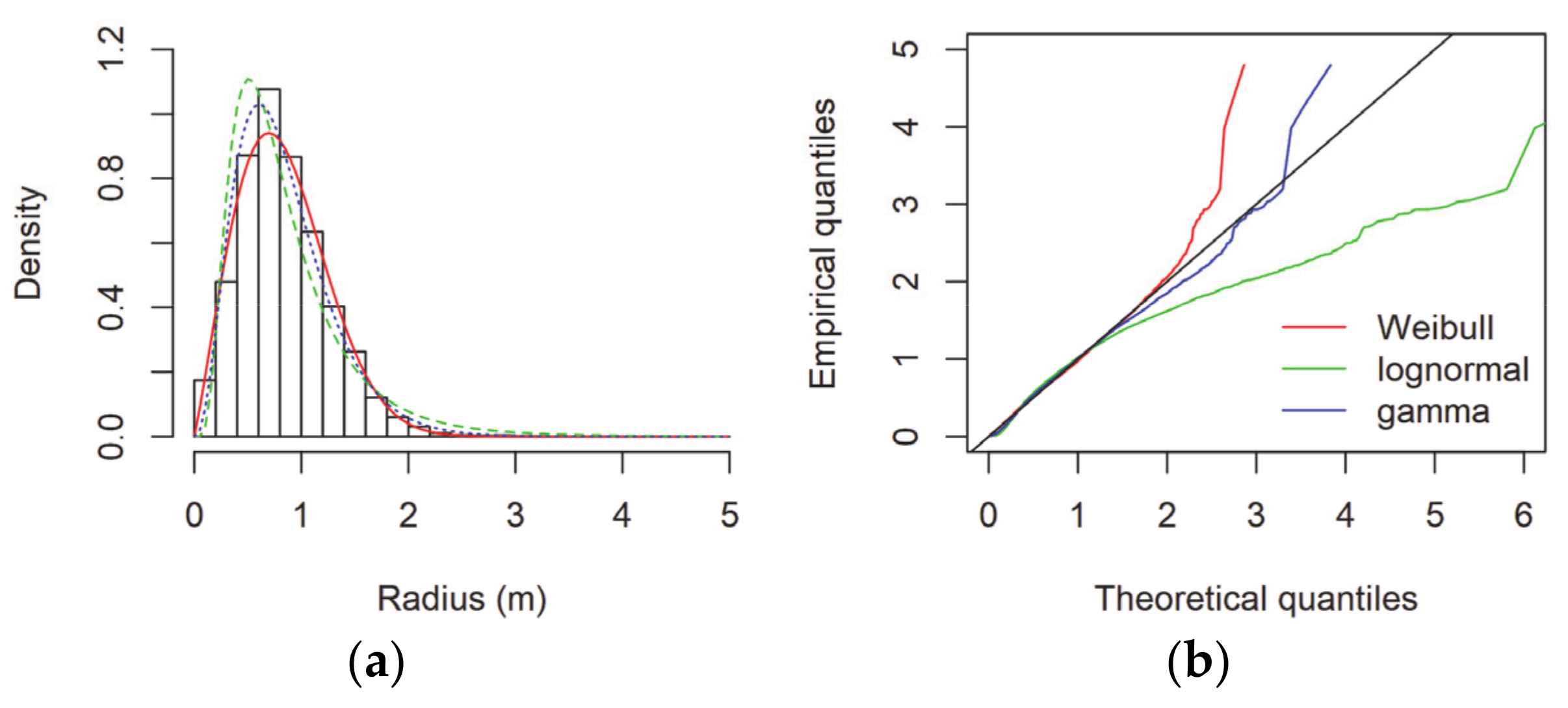
To evaluate possible fits of the radius distributions, goodness of fit evaluation tests for the selected Weibull, gamma, and lognormal distributions were conducted, employing Maximum Likelihood Estimation (MLE) method [
27]. The results allowed that both Weibull and gamma distribution can be fitted to the observed data, which can be observed in
Figure 10,
Figure 11 and
Figure 12. Furthermore, the estimated shape values for Weibull distribution were 2.06 for IGS Graz, 2.07 for IGS Padova, and 2.11 for IGS Medicina. This shape value was close to shape value of 2, which is a special case when Weibull distribution becomes Rayleigh distribution.
Goodness of fit tests for the Weibull and gamma distributions were performed, as well. The results are presented in
Table 7. Statistical description refers to the distance between fitted cumulative distribution function and the empirical distribution function, with a lower value representing better fit. Although these statistics should facilitate distribution selection, they are calculated differently. Methods used for these statistics assign different weights to certain parts of distributions. Therefore, these values should be interpreted cautiously, and with understanding of each test and representative results [
27]. Here, the values were quite comparable; therefore, both tested distributions could be approximately fitted.
3.3. Circular Statistics Analysis
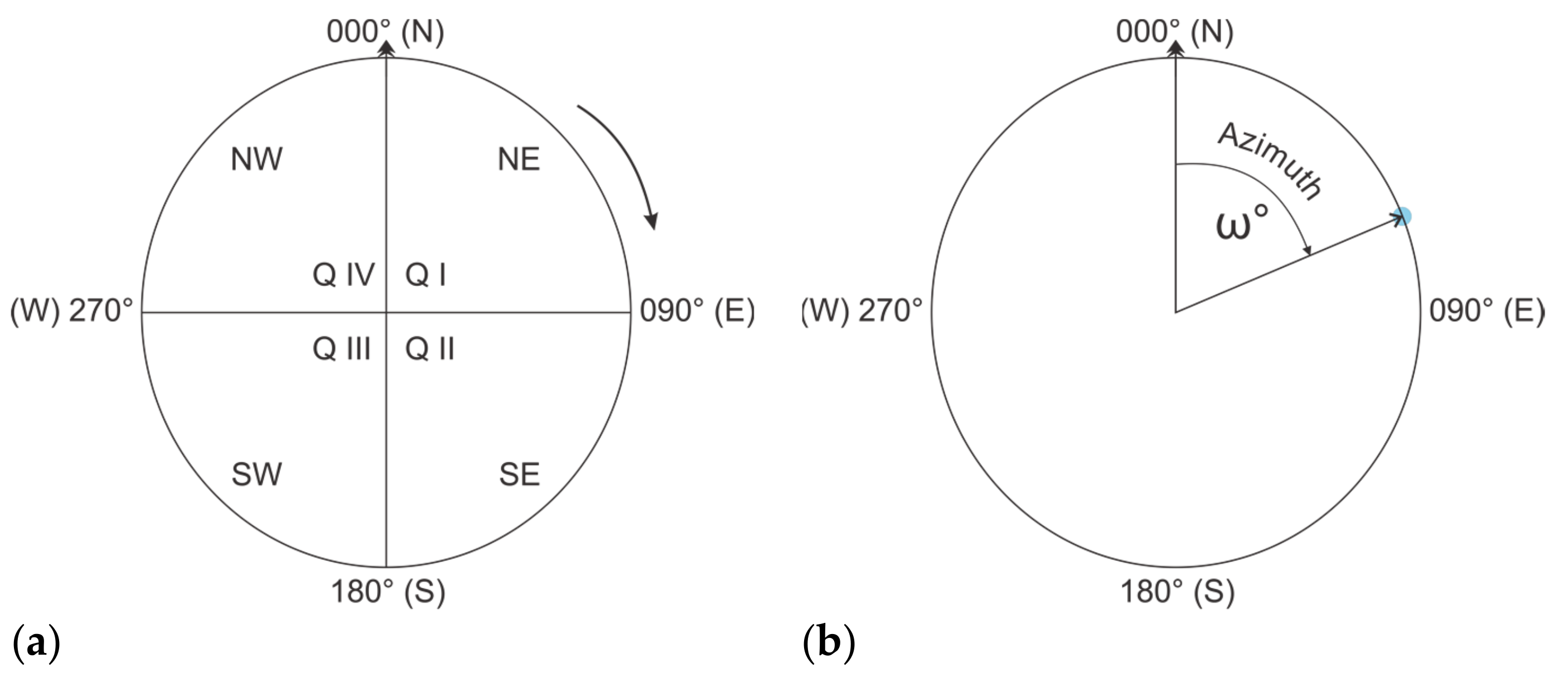
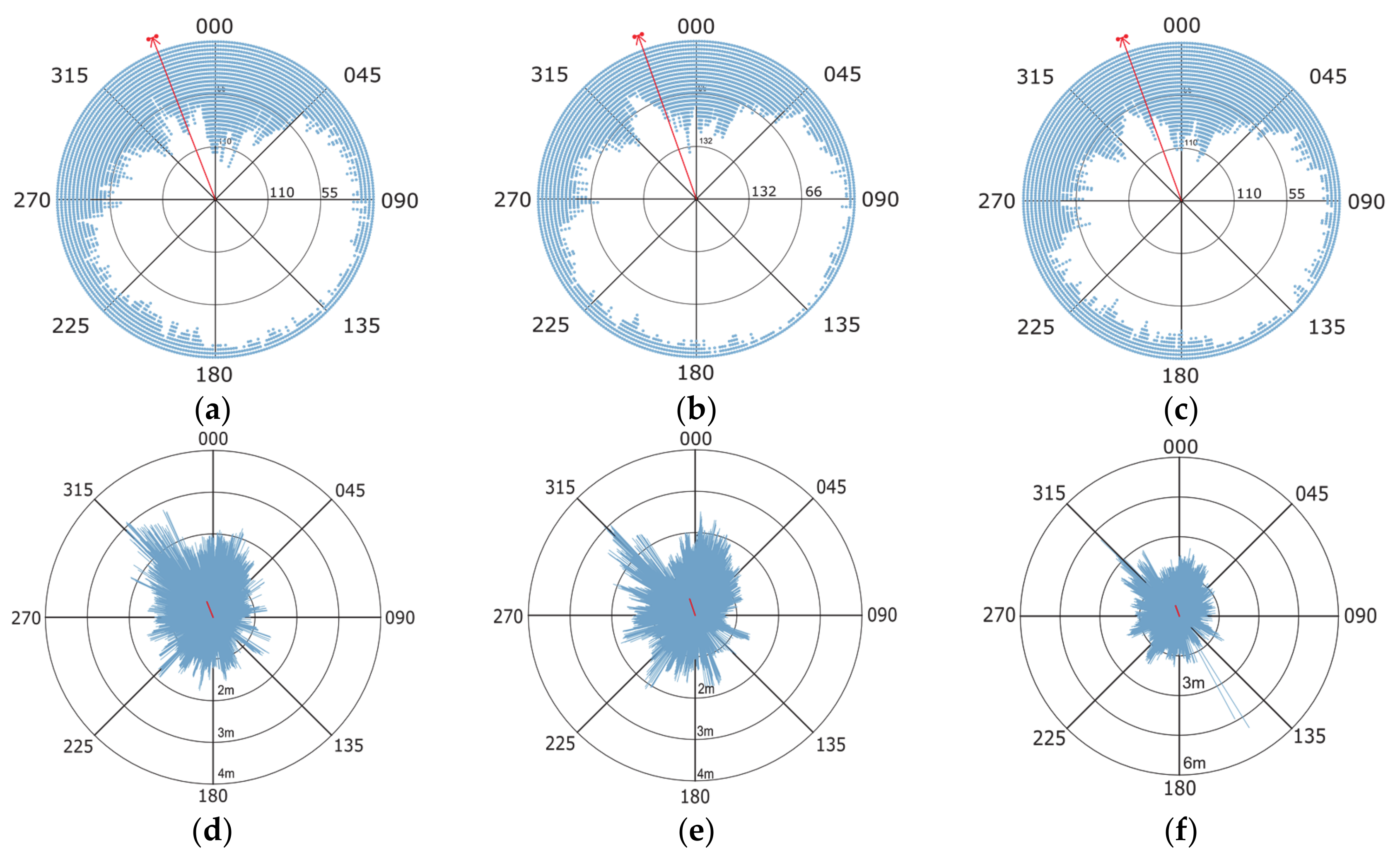
In this section, the circular analysis of azimuth distribution and the results of vector addition of azimuths and radius are presented. The results of circular statistics analysis are presented as follows. In
Figure 13, stacked points on a circular histogram and deviation vector radius values are presented, and results in
Table 8. The arrow line on histogram represents the mean deviation vector with corresponding 95% confidence intervals. Although the non-uniformity is evident, it is also characterized by mean module (
) and von Mises concentration parameter (
κ). Mean module represents the resultant of vector addition divided by the number of observations (or samples). Since the azimuths are considered as unit vectors, the module can be in range from 0–1, with larger values indicating directionality. The von Mises parameter represents a measure of data concentration in preferred direction. Value of 0 indicates uniform distribution, with non-uniformity taking place when the value increases.
The von Mises parameter value is considered significant when it is greater than 2 [
42]. Furthermore, the hypothesis for angular uniformity was rejected using the Rao and Rayleigh uniformity tests. Therefore, non-uniformity and directionality for all stations can be observed.
In
Figure 13a–c, respectively, in the first row are circular histograms with dots representing counts of azimuths in the observed direction. Likewise, the mean azimuth is depicted as a red arrow line with red dots representing limits of confidence intervals.
Figure 13d–f, respectively, in the second row show the deviation vectors with visible red line representing the resultant vector.
The resultant deviation vector value is calculated by vector addition [
12]. Azimuths are expressed in degrees, with radius values in meters. Resultant radius values are 0.43 m for Graz, 0.44 m for Padova, and 0.32 m for Medicina, compared to mean linear radius values at approximately 0.85 m. The mean azimuth of approximately 340° was observed for all stations, indicating displacement towards navigational quadrant IV (270° to 360°). The larger number of observations in navigational quadrants IV and I (000° to 090°) was evident.
It must be considered that the mean radius value, as presented in
Table 6, is an arithmetic mean of all radius values calculated and converted from the Cartesian coordinates. This value is calculated when only the magnitude is considered. The radius value calculated from the resultant deviation vector addition considers both the magnitude and direction. Therefore, this is the resultant value from all vectors. Finally, the radius value which is calculated as a square root of means of squared latitude and longitude deviations must be mentioned. This is the DRMS value or quadratic mean. This was also noted in Reference [
15] and should be considered when analyzing and interpreting mean radius values, as presented in
Table 6 and respective presentations. The analyses show directionality for all stations, towards the same direction or more appropriate,
the sector. This corresponds to the linear analysis in the Cartesian coordinate system and the respective density observations. The slight bimodality can be observed for navigational quadrants III (180° to 270°) and IV (270° to 360°).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}