Drone-Monitoring: Improving the Detectability of Threatened Marine Megafauna


Abstract
:1. Introduction
2. Materials and Methods
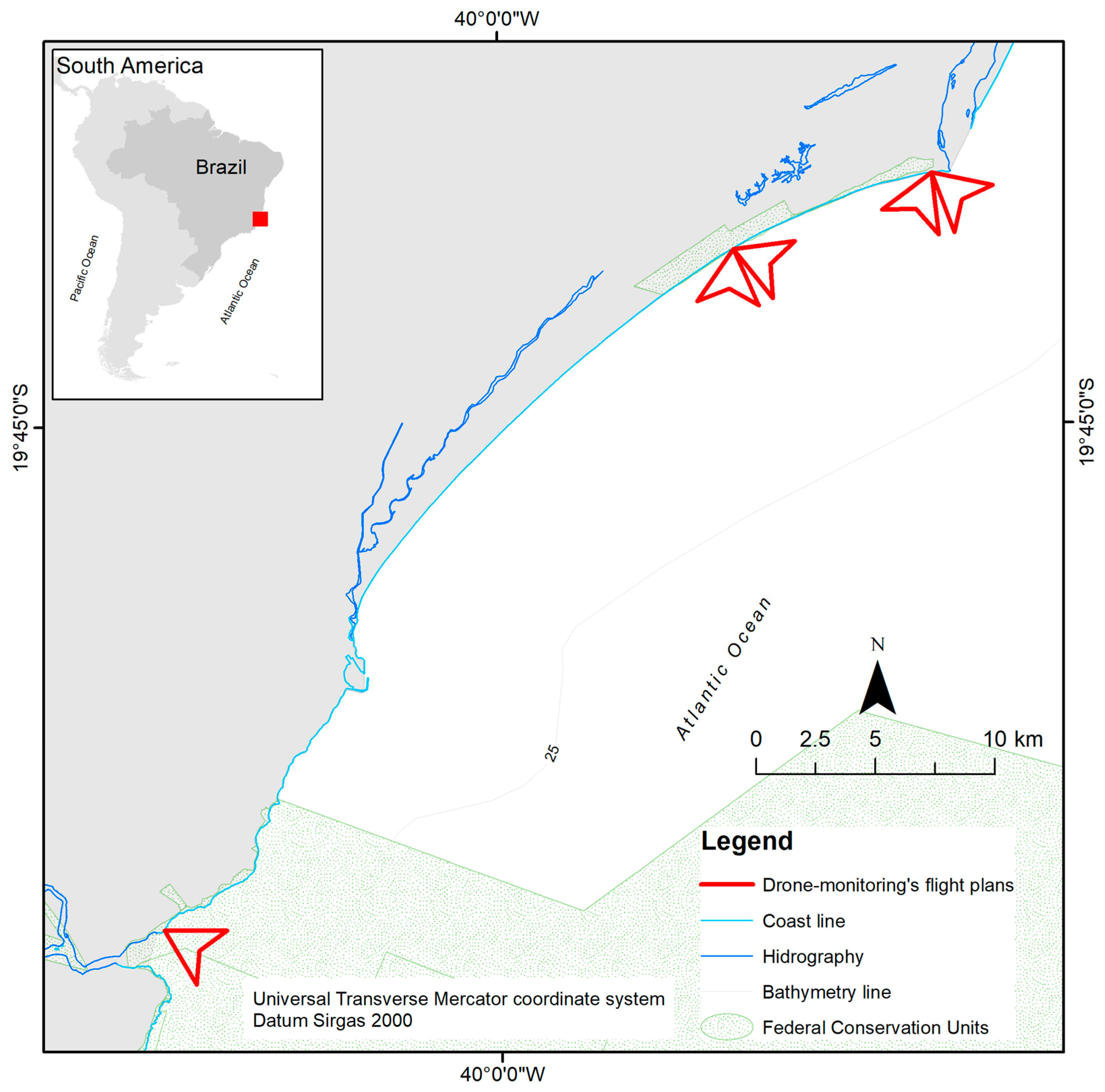
2.1. Study Area
2.2. Equipment and Licenses
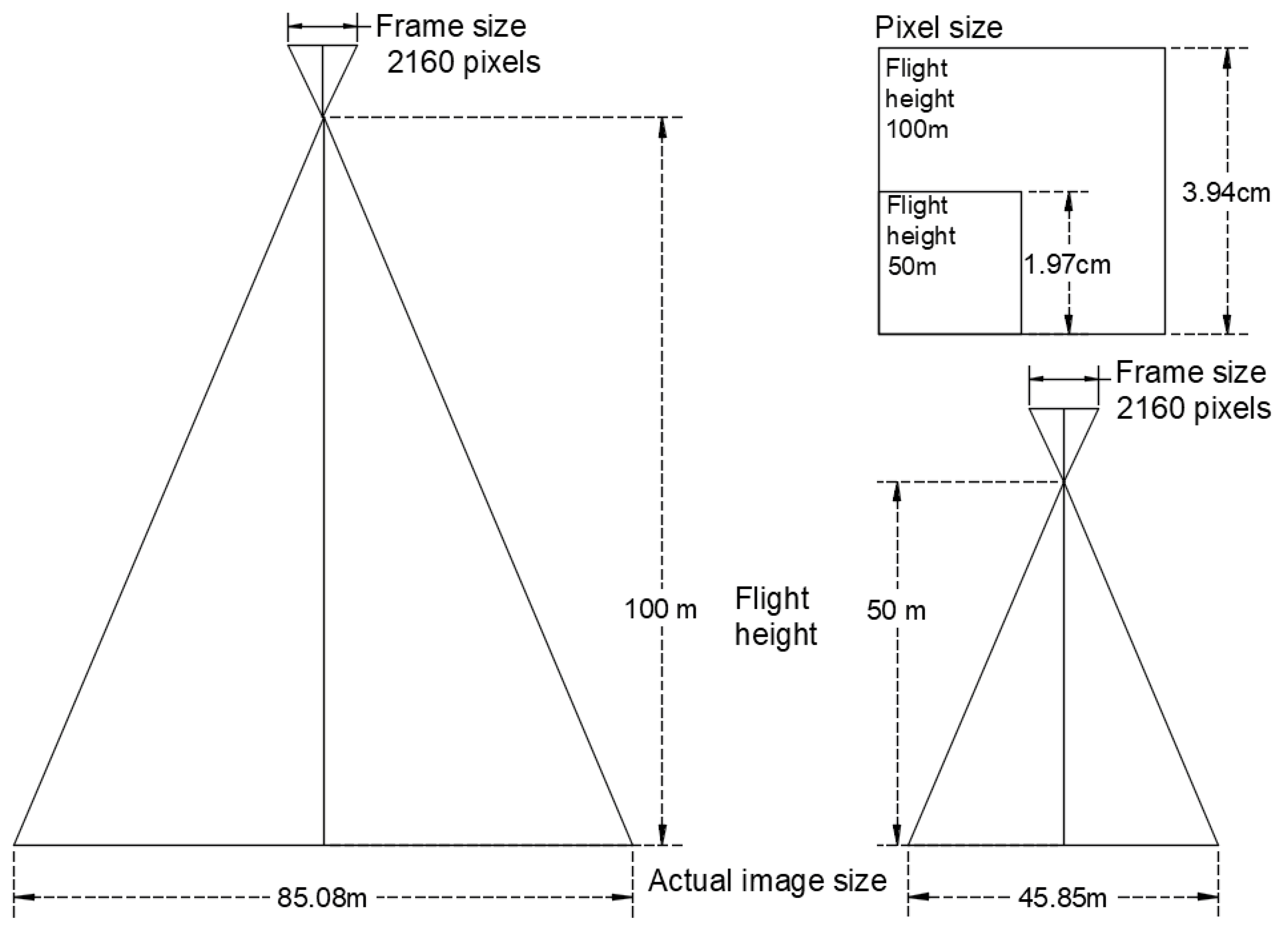
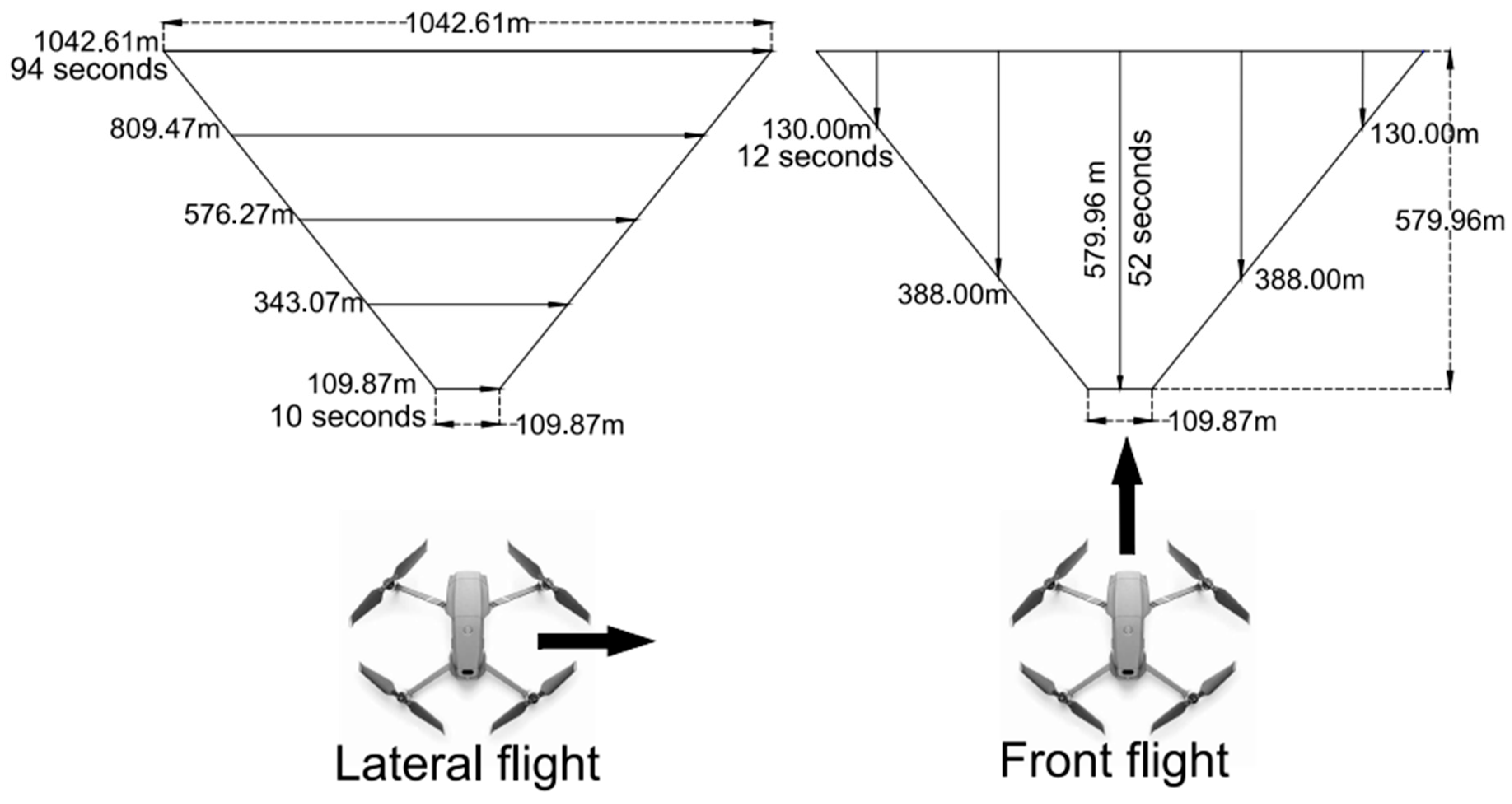
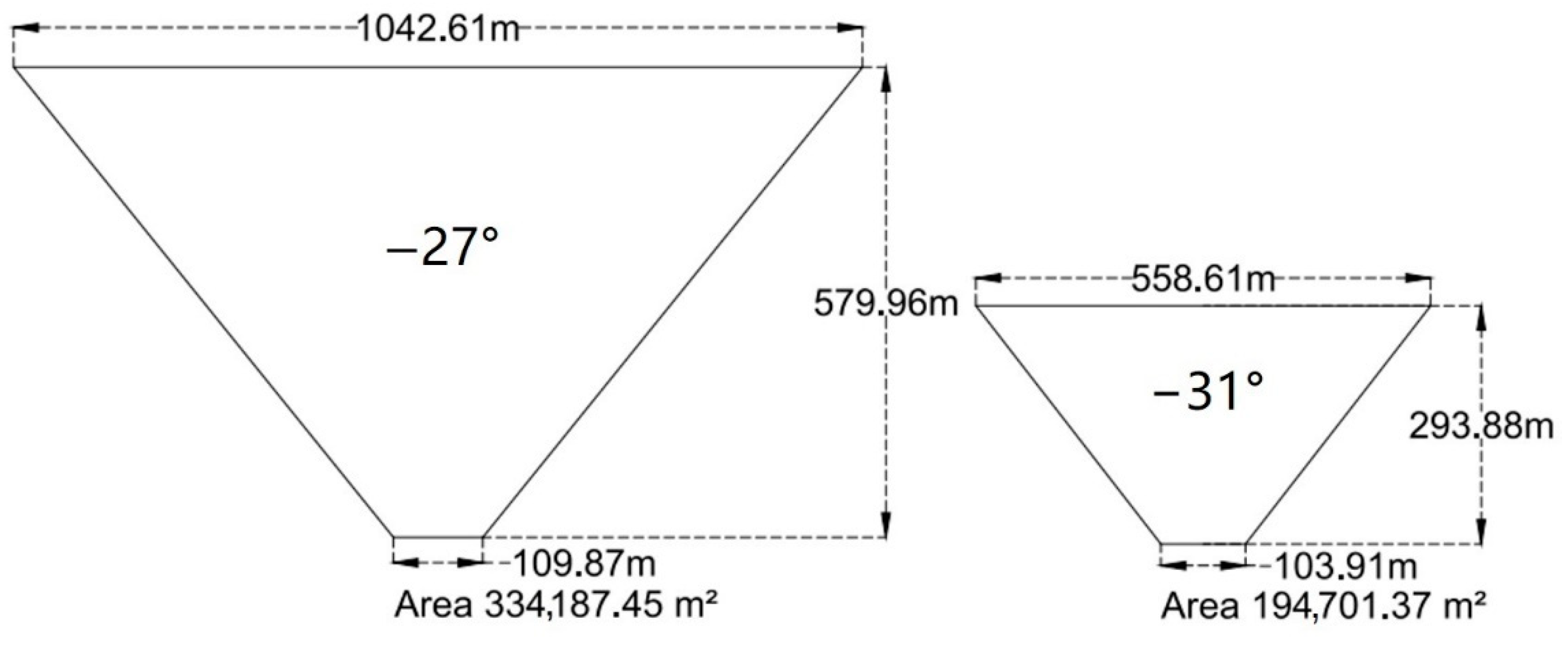
2.3. Flight Parameters
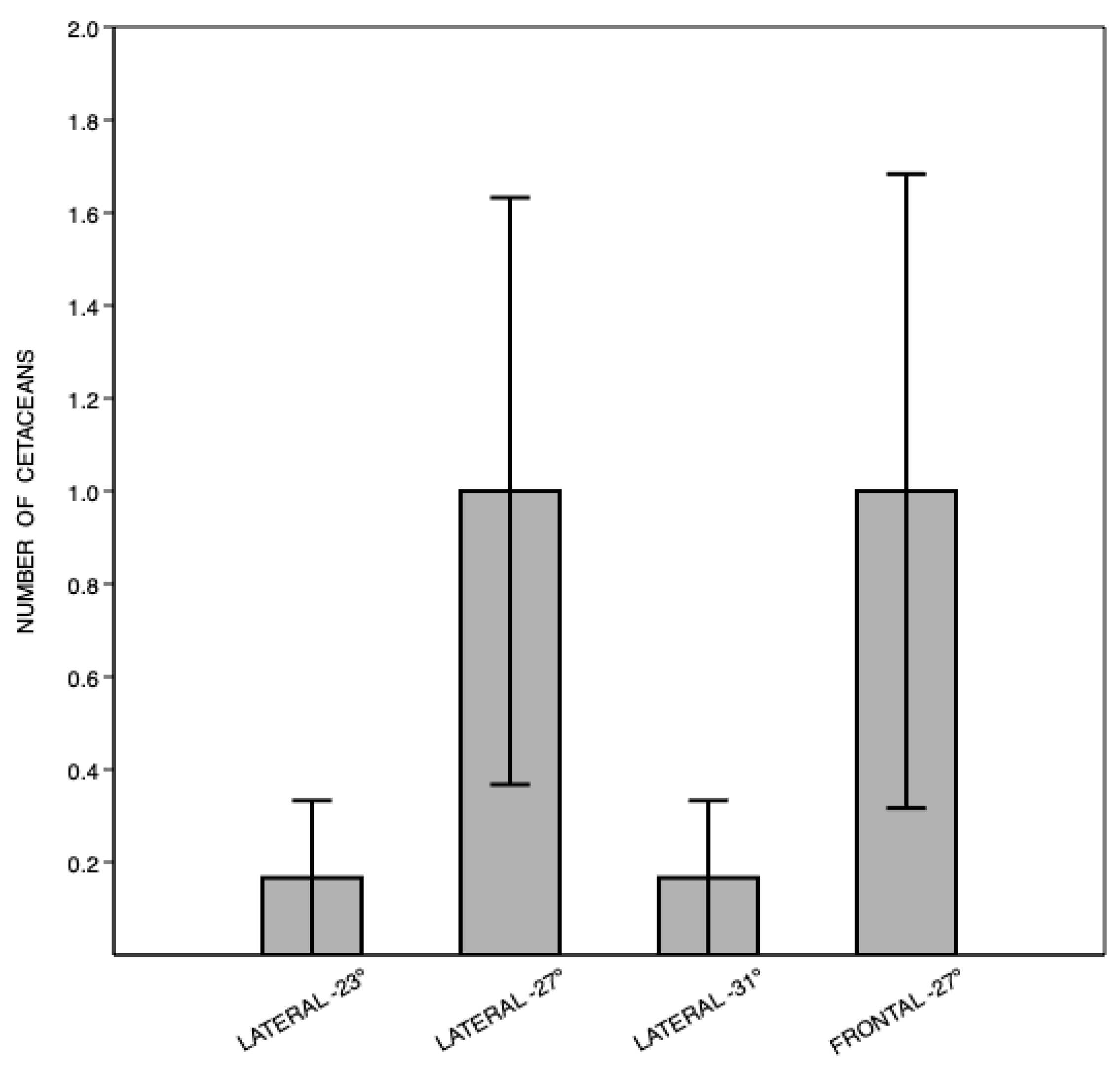
2.4. Detectability Tests
3. Results
3.1. Flight Pattern
3.2. Detectability
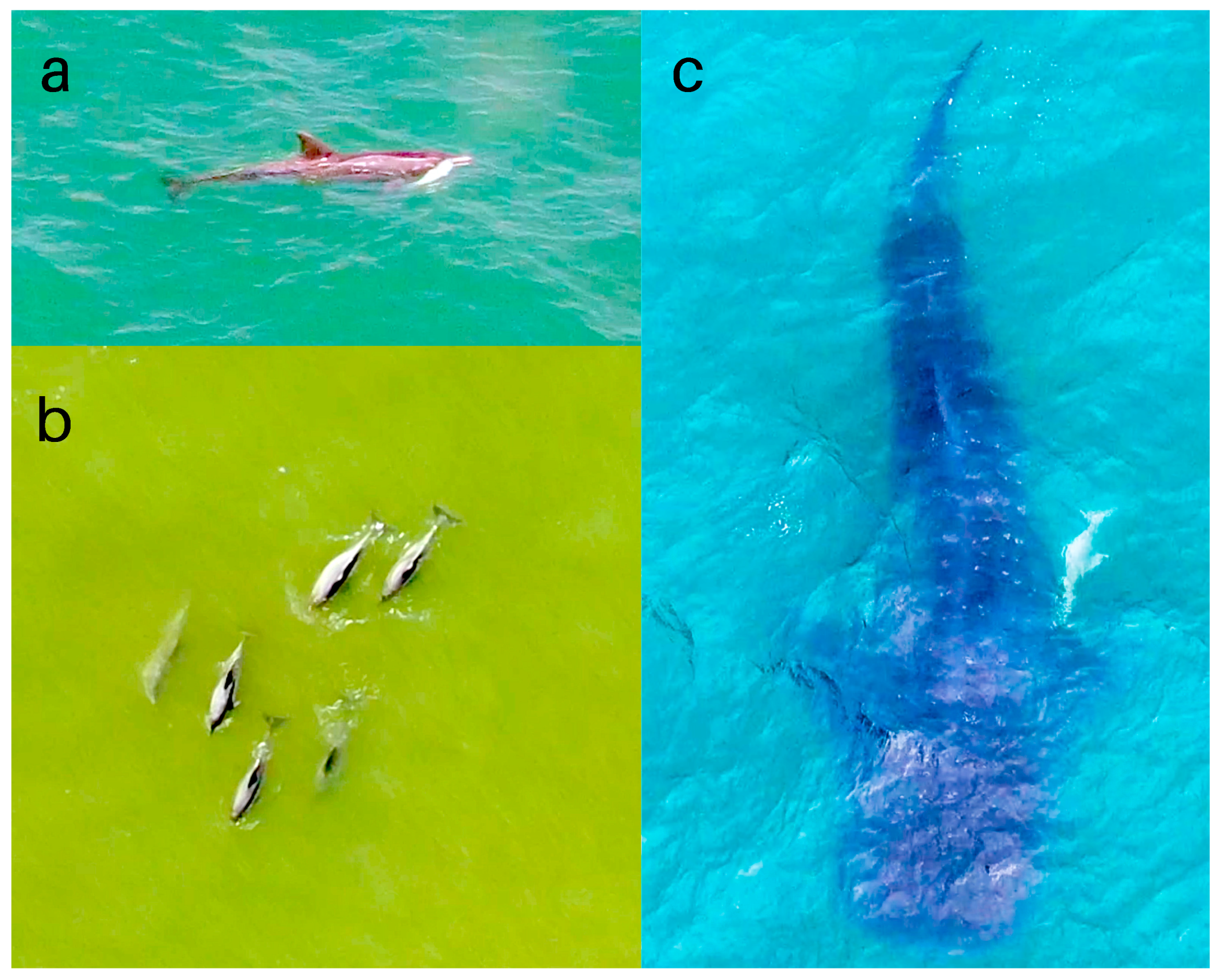
3.3. Marine Megafauna Recorded
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Hays, G.C.; Ferreira, L.C.; Sequeira, A.M.M.; Meekan, M.G.; Duarte, C.M.; Bailey, H.; Bailleul, F.; Bowen, W.D.; Caley, M.J.; Costa, D.P.; et al. Key Questions in Marine Megafauna Movement Ecology. Trends Ecol. Evol. 2016, 31, 463–475. [Google Scholar] [CrossRef] [Green Version]
- Tavares, D.C.; Moura, J.F.; Acevedo-Trejos, E.; Merico, A. Traits Shared by Marine Megafauna and Their Relationships With Ecosystem Functions and Services. Front. Mar. Sci. 2019, 6, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Lynam, C.P.; Llope, M.; Möllmann, C.; Helaouët, P.; Bayliss-Brown, G.A.; Stenseth, N.C. Interaction between top-down and bottom-up control in marine food webs. Proc. Natl. Acad. Sci. USA 2017, 114, 1952–1957. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Domiciano, I.G.; Domit, C.; Bracarense, A.P.F.R.L. The green turtle Chelonia mydas as a marine and coastal environmental sentinels: Anthropogenic activities and diseases. Semin. Agrar. 2017, 38, 3417–3434. [Google Scholar] [CrossRef] [Green Version]
- Bossart, G.D. Marine mammals as sentinel species for oceans and human health. Vet. Pathol. 2011, 48, 676–690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rezzolla, D.; Boldrocchi, G.; Storai, T. Evaluation of a low-cost, non-invasive survey technique to assess the relative abundance, diversity and behaviour of sharks on Sudanese reefs (Southern Red Sea). J. Mar. Biol. Assoc. U. K. 2014, 94, 599–606. [Google Scholar] [CrossRef]
- Fettermann, T.; Fiori, L.; Bader, M.; Doshi, A.; Breen, D.; Stockin, K.A.; Bollard, B. Behaviour reactions of bottlenose dolphins (Tursiops truncatus) to multirotor Unmanned Aerial Vehicles (UAVs). Sci. Rep. 2019, 9, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Torres, L.G.; Nieukirk, S.L.; Lemos, L.; Chandler, T.E. Drone up! Quantifying whale behavior from a new perspective improves observational capacity. Front. Mar. Sci. 2018, 5, 319. [Google Scholar] [CrossRef] [Green Version]
- Chabot, D.; Bird, D.M. Wildlife research and management methods in the 21st century: Where do unmanned aircraft fit in? J. Unmanned Veh. Syst. 2015, 3, 137–155. [Google Scholar] [CrossRef] [Green Version]
- Christie, K.S.; Gilbert, S.L.; Brown, C.L.; Hatfield, M.; Hanson, L. Unmanned aircraft systems in wildlife research: Current and future applications of a transformative technology. Front. Ecol. Environ. 2016, 14, 241–251. [Google Scholar] [CrossRef]
- Brooke, S.; Graham, D.; Jacobs, T.; Littnan, C.; Manuel, M.; O’Conner, R. Testing marine conservation applications of unmanned aerial systems (UAS) in a remote marine protected area. J. Unmanned Veh. Syst. 2015, 3, 237–251. [Google Scholar] [CrossRef]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UASs) the future of wildlife monitoring? A review of accomplishments and challenges. Mamm. Rev. 2015, 45, 239–252. [Google Scholar] [CrossRef]
- Goebel, M.E.; Perryman, W.L.; Hinke, J.T.; Krause, D.J.; Hann, N.A.; Gardner, S.; LeRoi, D.J. A small unmanned aerial system for estimating abundance and size of Antarctic predators. Polar Biol. 2015, 38, 619–630. [Google Scholar] [CrossRef] [Green Version]
- Sweeney, K.L.; Helker, V.T.; Perryman, W.L.; LeRoi, D.J.; Fritz, L.W.; Gelatt, T.S.; Angliss, R.P. Flying beneath the clouds at the edge of the world: Using a hexacopter to supplement abundance surveys of Steller sea lions (Eumetopias jubatus) in Alaska. J. Unmanned Veh. Syst. 2015, 4, 70–81. [Google Scholar] [CrossRef] [Green Version]
- Hodgson, A.; Peel, D.; Kelly, N. Unmanned aerial vehicles for surveying marine fauna: Assessing detection probability. Ecol. Appl. 2017, 27, 1253–1267. [Google Scholar] [CrossRef] [PubMed]
- Fiori, L.; Doshi, A.; Martinez, E.; Orams, M.B.; Bollard-Breen, B. The use of unmanned aerial systems in marine mammal research. Remote Sens. 2017, 9, 543. [Google Scholar] [CrossRef] [Green Version]
- Martin, J.; Edwards, H.H.; Burgess, M.A.; Percival, H.F.; Fagan, D.E.; Gardner, B.E.; Ortega-Ortiz, J.G.; Ifju, P.G.; Evers, B.S.; Rambo, T.J. Estimating distribution of hidden objects with drones: From tennis balls to manatees. PLoS ONE 2012, 7, e38882. [Google Scholar]
- Dawson, S.M.; Bowman, M.H.; Leunissen, E.; Sirguey, P. Inexpensive aerial photogrammetry for studies of whales and large marine animals. Front. Mar. Sci. 2017, 4, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Horton, T.W.; Hauser, N.; Cassel, S.; Klaus, K.F.; de Oliveira, T.F.; Key, N. Doctor drone: Non-invasive measurement of humpback whale vital signs using unoccupied aerial system infrared thermography. Front. Mar. Sci. 2019, 6, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Centelleghe, C.; Carraro, L.; Gonzalvo, J.; Rosso, M.; Esposti, E.; Gili, C.; Bonato, M.; Pedrotti, D.; Cardazzo, B.; Povinelli, M.; et al. The use of Unmanned Aerial Vehicles (UAVs) to sample the blow microbiome of small cetaceans. PLoS ONE 2020, 15, e0235537. [Google Scholar] [CrossRef]
- Rees, A.F.; Avens, L.; Ballorain, K.; Bevan, E.; Broderick, A.C.; Carthy, R.R.; Christianen, M.J.A.; Duclos, G.; Heithaus, M.R.; Johnston, D.W.; et al. The potential of unmanned aerial systems for sea turtle research and conservation: A review and future directions. Endanger. Species Res. 2018, 35, 81–100. [Google Scholar] [CrossRef] [Green Version]
- Schofield, G.; Katselidis, K.A.; Lilley, M.K.S.; Reina, R.D.; Hays, G.C. Detecting elusive aspects of wildlife ecology using drones: New insights on the mating dynamics and operational sex ratios of sea turtles. Funct. Ecol. 2017, 31, 2310–2319. [Google Scholar] [CrossRef]
- Brisson-Curadeau, É.; Bird, D.; Burke, C.; Fifield, D.A.; Pace, P.; Sherley, R.B.; Elliott, K.H. Seabird species vary in behavioural response to drone census. Sci. Rep. 2017, 7, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Raoult, V.; Tosetto, L.; Williamson, J.E. Drone-based high-resolution tracking of aquatic vertebrates. Drones 2018, 2, 37. [Google Scholar] [CrossRef] [Green Version]
- Kiszka, J.J.; Mourier, J.; Gastrich, K.; Heithaus, M.R. Using unmanned aerial vehicles (UAVs) to investigate shark and ray densities in a shallow coral lagoon. Mar. Ecol. Prog. Ser. 2016, 560, 237–242. [Google Scholar] [CrossRef]
- Raoult, V.; Colefax, A.P.; Allan, B.M.; Cagnazzi, D.; Castelblanco-Martínez, N.; Ierodiaconou, D.; Johnston, D.W.; Landeo-Yauri, S.; Lyons, M.; Pirotta, V.; et al. Operational protocols for the use of drones in marine animal research. Drones 2020, 4, 64. [Google Scholar] [CrossRef]
- de Oliveira Gomes, L.E.; Correa, L.B.; Sá, F.; Neto, R.R.; Bernardino, A.F. The impacts of the Samarco mine tailing spill on the Rio Doce estuary, Eastern Brazil. Mar. Pollut. Bull. 2017, 120, 28–36. [Google Scholar] [CrossRef] [PubMed]
- Hatje, V.; Pedreira, R.M.A.; De Rezende, C.E.; Schettini, C.A.F.; De Souza, G.C.; Marin, D.C.; Hackspacher, P.C. The environmental impacts of one of the largest tailing dam failures worldwide. Sci. Rep. 2017, 7, 1–13. [Google Scholar] [CrossRef]
- Fernandes, G.W.; Goulart, F.F.; Ranieri, B.D.; Coelho, M.S.; Dales, K.; Boesche, N.; Bustamante, M.; Carvalho, F.A.; Carvalho, D.C.; Dirzo, R.; et al. Deep into the mud: Ecological and socio-economic impacts of the dam breach in Mariana, Brazil. Nat. Conserv. 2016, 14, 35–45. [Google Scholar] [CrossRef]
- Do Carmo, F.F.; Kamino, L.H.Y.; Junior, R.T.; de Campos, I.C.; do Carmo, F.F.; Silvino, G.; Mauro, M.L.; Rodrigues, N.U.A.; de Souza Miranda, M.P.; Pinto, C.E.F. Fundão tailings dam failures: The environment tragedy of the largest technological disaster of Brazilian mining in global context. Perspect. Ecol. Conserv. 2017, 15, 145–151. [Google Scholar] [CrossRef]
- Livro Vermelho da Fauna Brasileira Ameaçada de Extinção. ICMBio/MMA. 2018. Available online: https://www.icmbio.gov.br/ (accessed on 20 August 2020).
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef] [Green Version]
- Zar, J.H. Biostatistical Analysis; Prentice-Hall Inc.: Englewood Cliffs, NJ, USA, 1984. [Google Scholar]
- Hammer, Ø.; Harper, D.A.T.; Ryan, P.D. PAST: Paleontological statistics software package for education and data analysis. Palaeontol. Electron. 2001, 4, 9. [Google Scholar]
- Joyce, K.E.; Duce, S.; Leahy, S.M.; Leon, J.; Maier, S.W. Principles and practice of acquiring drone-based image data in marine environments. Mar. Freshw. Res. 2019, 70, 952–963. [Google Scholar] [CrossRef]
- Cremer, M.J.; Hardt, F.A.S.; Tonello, A.J.; Simões-Lopes, P.C. Distribution and status of the Guiana dolphin Sotalia guianensis (Cetacea, Delphinidae) population in Babitonga Bay, Southern Brazil. Zool. Stud. 2011, 50, 327–337. [Google Scholar]
- Sucunza, F.; Danilewicz, D.; Cremer, M.; Andriolo, A.; Zerbini, A.N. Refining estimates of availability bias to improve assessments of the conservation status of an endangered dolphin. PLoS ONE 2018, 13, e0194213. [Google Scholar] [CrossRef] [PubMed]
- Nowacek, D.P.; Christiansen, F.; Bejder, L.; Goldbogen, J.A.; Friedlaender, A.S. Studying cetacean behaviour: New technological approaches and conservation applications. Anim. Behav. 2016, 120, 235–244. [Google Scholar] [CrossRef] [Green Version]
- Giles, A.B.; Butcher, P.A.; Colefax, A.P.; Pagendam, D.E.; Mayjor, M.; Kelaher, B.P. Responses of bottlenose dolphins (Tursiops spp.) to small drones. Aquat. Conserv. Mar. Freshw. Ecosyst. 2020, 1–8. [Google Scholar] [CrossRef]
- Castro, J.; Borges, F.O.; Cid, A.; Laborde, M.I.; Rosa, R.; Pearson, H.C. Assessing the Behavioural Responses of Small Cetaceans to Unmanned Aerial Vehicles. Remote Sens. 2021, 13, 156. [Google Scholar] [CrossRef]
- Boyd, C.; Hobbs, R.C.; Punt, A.E.; Shelden, K.E.W.; Sims, C.L.; Wade, P.R. Bayesian estimation of group sizes for a coastal cetacean using aerial survey data. Mar. Mammal Sci. 2019, 35, 1322–1346. [Google Scholar] [CrossRef]
- Gerrodette, T.; Perryman, W.L.; Oedekoven, C.S. Accuracy and precision of dolphin group size estimates. Mar. Mammal Sci. 2018, 35, 22–39. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Mott, R.; Baylis, S.M.; Pham, T.T.; Wotherspoon, S.; Kilpatrick, A.D.; Raja Segaran, R.; Reid, I.; Terauds, A.; Koh, L.P. Drones count wildlife more accurately and precisely than humans. Methods Ecol. Evol. 2018, 9, 1160–1167. [Google Scholar] [CrossRef] [Green Version]
- Schofield, G.; Esteban, N.; Katselidis, K.A.; Hays, G.C. Drones for research on sea turtles and other marine vertebrates—A review. Biol. Conserv. 2019, 238, 108214. [Google Scholar] [CrossRef]
- Colefax, A.P.; Butcher, P.A.; Kelaher, B.P. The potential for unmanned aerial vehicles (UAVs) to conduct marine fauna surveys in place of manned aircraft. ICES J. Mar. Sci. 2018, 75, 1–8. [Google Scholar] [CrossRef]
- Gray, P.C.; Fleishman, A.B.; Klein, D.J.; McKown, M.W.; Bézy, V.S.; Lohmann, K.J.; Johnston, D.W. A convolutional neural network for detecting sea turtles in drone imagery. Methods Ecol. Evol. 2019, 10, 345–355. [Google Scholar] [CrossRef]
- Gray, P.C.; Bierlich, K.C.; Mantell, S.A.; Friedlaender, A.S.; Goldbogen, J.A.; Johnston, D.W. Drones and convolutional neural networks facilitate automated and accurate cetacean species identification and photogrammetry. Methods Ecol. Evol. 2019, 10, 1490–1500. [Google Scholar] [CrossRef]
- Bevan, E.; Whiting, S.; Tucker, T.; Guinea, M.; Raith, A.; Douglas, R. Measuring behavioral responses of sea turtles, saltwater crocodiles, and crested terns to drone disturbance to define ethical operating thresholds. PLoS ONE 2018, 13, e0194460. [Google Scholar] [CrossRef]
- Christiansen, F.; Dawson, S.M.; Durban, J.W.; Fearnbach, H.; Miller, C.A.; Bejder, L.; Uhart, M.; Sironi, M.; Corkeron, P.; Rayment, W. Population comparison of right whale body condition reveals poor state of the North Atlantic right whale. Mar. Ecol. Prog. Ser. 2020, 640, 1–16. [Google Scholar] [CrossRef]
- Pace, D.S.; Arcangeli, A.; Mussi, B.; Vivaldi, C.; Ledon, C.; Lagorio, S.; Giacomini, G.; Pavan, G.; Ardizzone, G. Habitat suitability modeling in different sperm whale social groups. J. Wildl. Manag. 2018, 82, 1062–1073. [Google Scholar] [CrossRef]
- Ventura, D.; Bonifazi, A.; Gravina, M.F.; Belluscio, A.; Ardizzone, G. Mapping and classification of ecologically sensitive marine habitats using unmanned aerial vehicle (UAV) imagery and object-based image analysis (OBIA). Remote Sens. 2018, 10, 1331. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operational Description for Marine Megafauna Drone-Monitoring | |
|---|---|
| Equipment | 3 UAV Mavic 2 Zoom, 2 FPV DJI Goggles Racing Edition, 2 binoculars Lugan Astronomical Gladiator Triplet 25-125 X 80, 3 tablet iPad mini, 10 memory cards 128 GB, 10 batteries UAV, 1 computer iMac Pro 27 ", 2 MacBook Pro, 1 lens filter kit PL/ND, 1 weather station, 10 HD Backup Plus Hub Seagate 8TB. |
| Infrastructure | Tents, tripods, chairs, tables. |
| Team | Remote Pilot, Copilot, Drone Observer, Fauna Observer, Logistics Operator. |
| License | ICAO (USA), DECEA, ANAC, ANATEL (BRAZIL) |
| Safety | EVLOS (3 km of radius), VMC (wind 26 km/h, no rain, no fire). |
| Experiment | Camera Angle | Drone Position |
|---|---|---|
| 1 | −23° | Lateral |
| 2 | −27° | Lateral |
| 3 | −31° | Lateral |
| 4 | −27° | Frontal |
| Tetrapods Group | Order | Family | Species | Popular Name | Threatened Category (IUCN) | Number of Sightings |
|---|---|---|---|---|---|---|
| Sea birds | Suliformes | Fregatidae | Fregata magnificens | Magnificent frigatebird | Least concern | 1 |
| Suliformes | Sulidae | Sula leucogaster | Brown booby | Least concern | 96 | |
| Suliformes | Sulidae | Sula dactylatra | Masked booby | Least concern | 2 | |
| Procellariiformes | Procellariidae | Thalassarche sp. | Albatross | – | 1 | |
| Charadriiformes | Sternidae | Sterna hirundo | Common tern | Least concern | 30 | |
| Charadriiformes | Sternidae | Phaetusa simplex | Large-billed tern | Least concern | 158 | |
| Pelecaniformes | Ardeidae | Egretta thula | Snowy egret | Least concern | 1 | |
| Sea turtles | Testudinata | Cheloniidae | Caretta caretta | Loggerhead | Vulnerable | 2 |
| Testudinata | Cheloniidae | Lepidochelys olivacea | Olive ridley | Vulnerable | 2 | |
| Testudinata | Cheloniidae | Chelonia mydas | Green turtle | Endangered | 188 | |
| Testudinata | Dermochelyidae | Dermochelys coriacea | Leatherback | Vulnerable | 2 | |
| Marine mammals | Cetartiodactyla | Delphinidae | Steno bredanensis | Rough-toothed dolphin | Least concern | 10 |
| Cetartiodactyla | Delphinidae | Sotalia guianensis | Guiana dolphin | Near threatened | 640 | |
| Cetartiodactyla | Pontoporiidae | Pontoporia blainvillei | Franciscana | Vulnerable | 153 | |
| Large fishes | Perciformes | Carangidae | Caranx lugubris | Black jack | Least concern | 2 |
| Perciformes | Echeneidae | Remora sp. | Common remora | – | 1 | |
| Orectolobiformes | Rhincodontidae | Rhincodon typus | Whale shark | Endangered | 1 | |
| Myliobatiformes | Myliobatidae | Aetobatus narinari | Spotted eagle ray | Near threatened | 1 | |
| Myliobatiformes | Rhinopteridae | Rhinoptera bonasus | American cownose ray | Near threatened | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barreto, J.; Cajaíba, L.; Teixeira, J.B.; Nascimento, L.; Giacomo, A.; Barcelos, N.; Fettermann, T.; Martins, A. Drone-Monitoring: Improving the Detectability of Threatened Marine Megafauna. Drones 2021, 5, 14. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5010014
Barreto J, Cajaíba L, Teixeira JB, Nascimento L, Giacomo A, Barcelos N, Fettermann T, Martins A. Drone-Monitoring: Improving the Detectability of Threatened Marine Megafauna. Drones. 2021; 5(1):14. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5010014
Chicago/Turabian StyleBarreto, Jonathas, Luciano Cajaíba, João Batista Teixeira, Lorena Nascimento, Amanda Giacomo, Nelson Barcelos, Ticiana Fettermann, and Agnaldo Martins. 2021. "Drone-Monitoring: Improving the Detectability of Threatened Marine Megafauna" Drones 5, no. 1: 14. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5010014