
Biomass Estimation of Agave durangensis Gentry Using High-Resolution Images in Nombre de Dios, Durango

 , and
, and
Abstract
:
1. Introduction
2. Materials and Methods
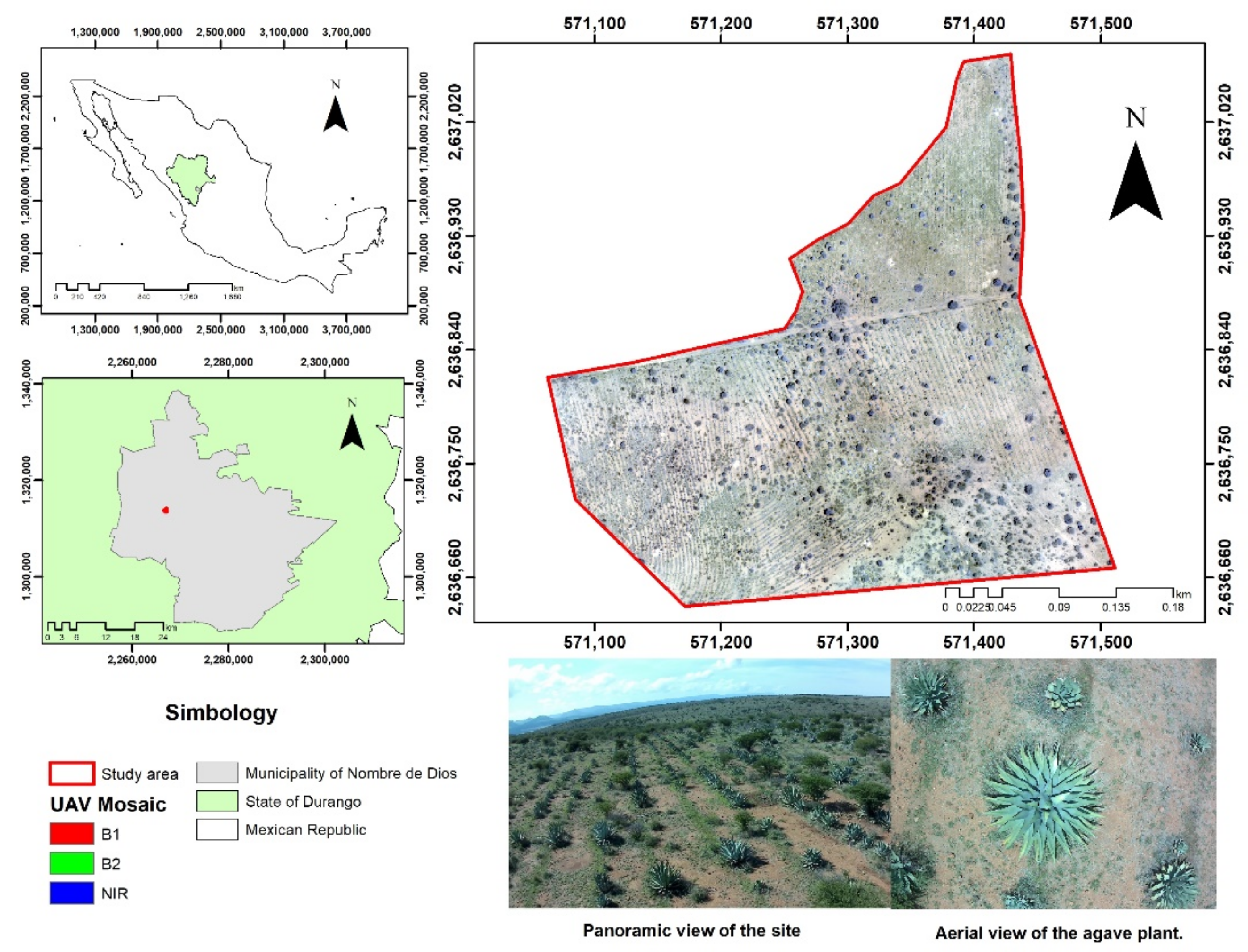
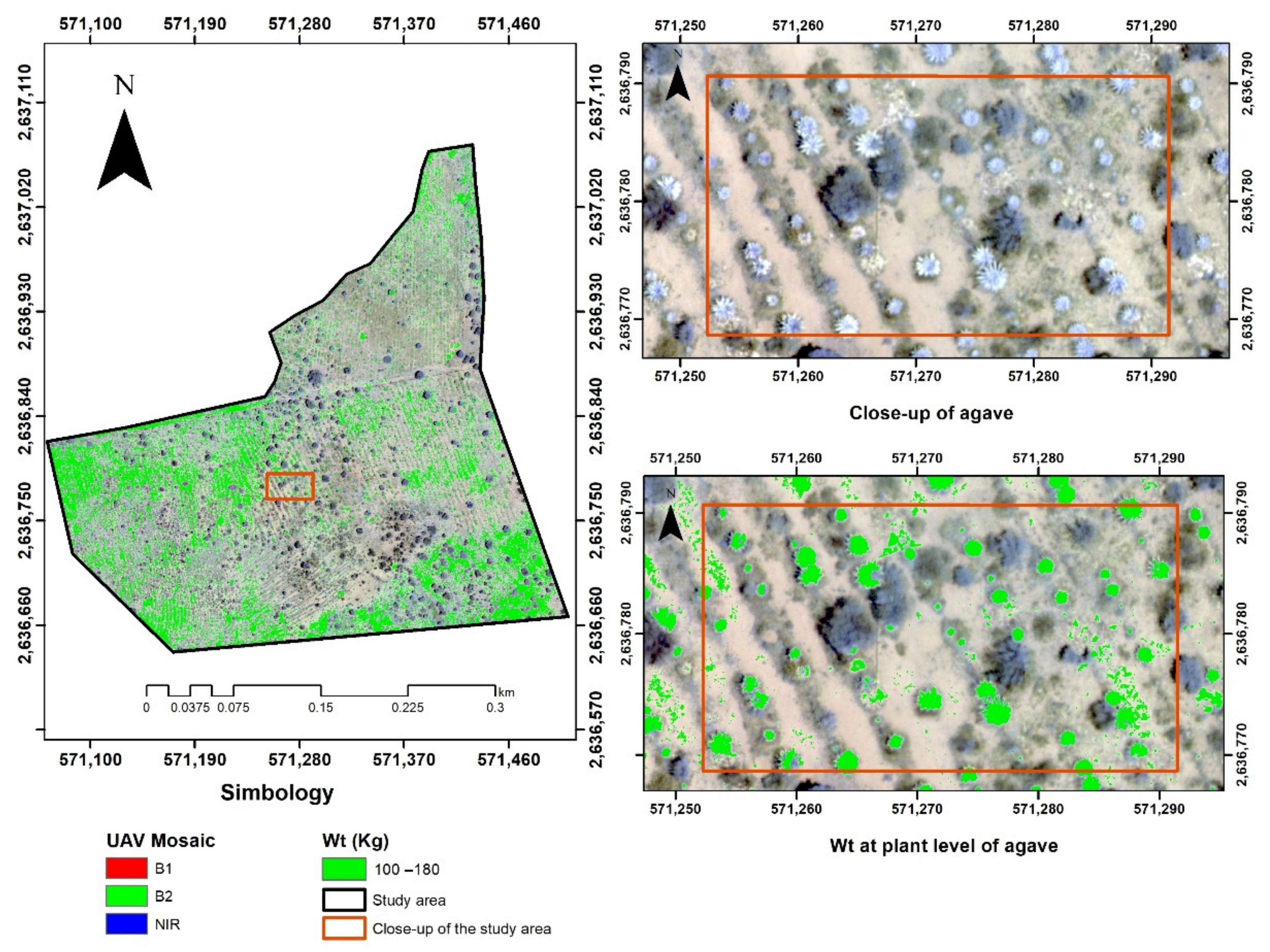
2.1. Study Area
2.2. Estimation of Biomass
2.3. Information Obtained by the Unmanned Aerial Vehicle (UAV)
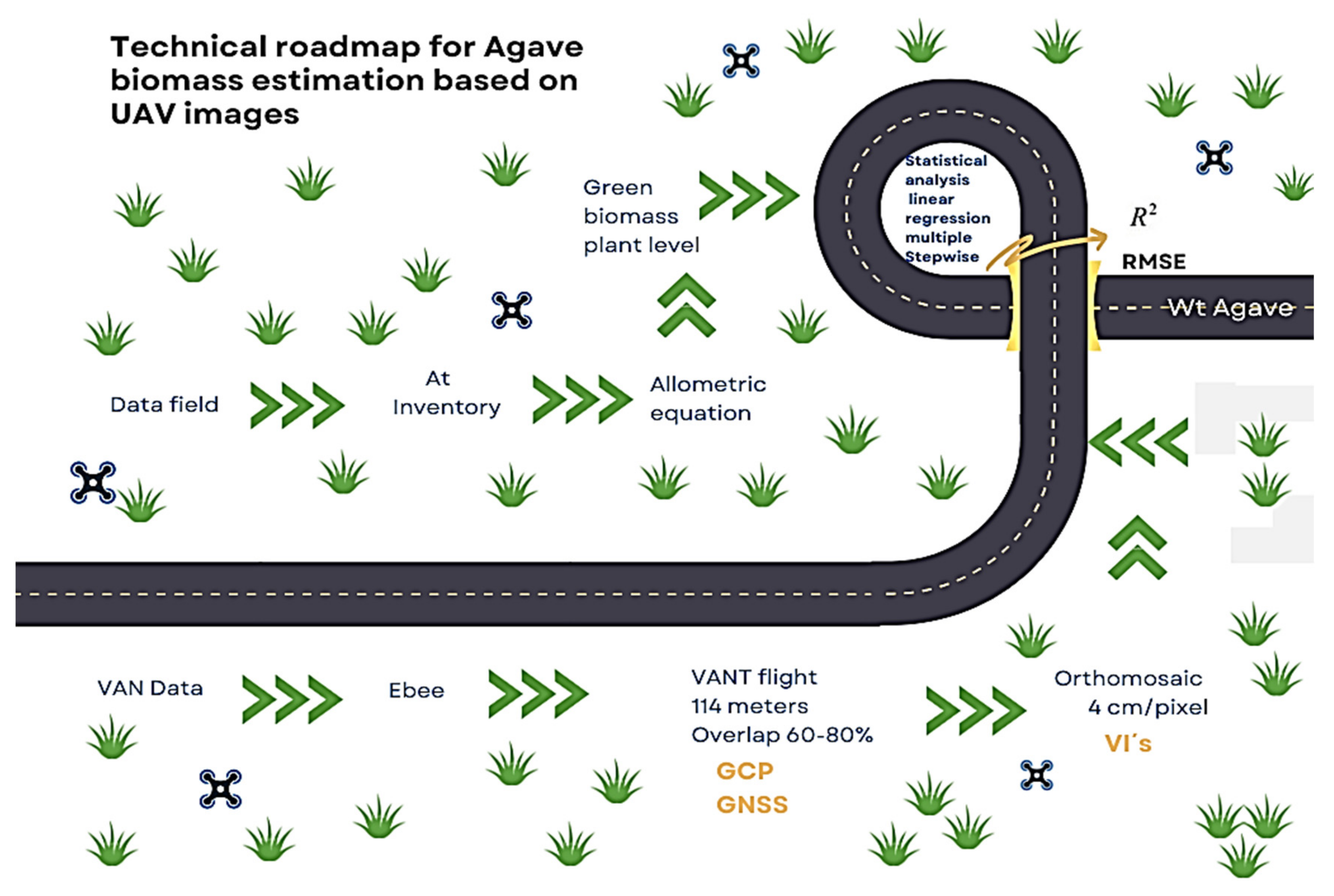
2.4. Acquisition and Processing of UAV Images

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Formula | Reference |
|---|---|---|
| NDVI (normalized difference vegetation index) | (NIR − red)/(NIR + red) | Rouse et al. [36] |
| GNDVI (green normalized difference vegetation index) | (NIR − green)/(NIR + green) | Gitelson et al. [37] |
| EVI2 (enhanced vegetation index) | 2.5 × (NIR − red)/((NIR + 2.4 × red) + 1) | Jiang et al. [38] |
| SAVI (soil-adjusted vegetation index) | ((NIR − red))/((NIR + red + 0.16)) | Rondeaux et al. [39] |
| SR (simple ratio) | NIR/red | Birth and McVey [40] |
2.5. Statistical Analysis
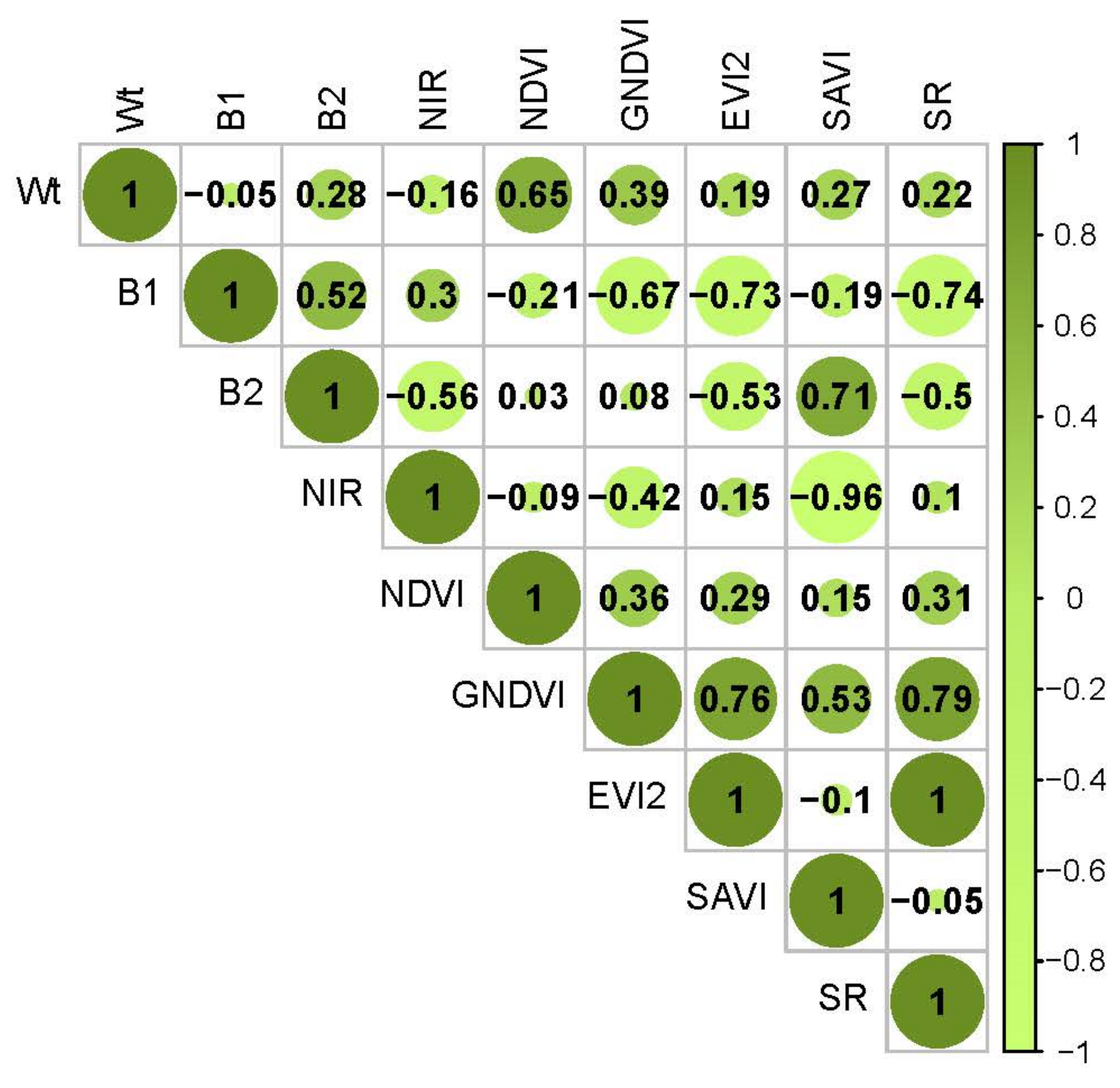
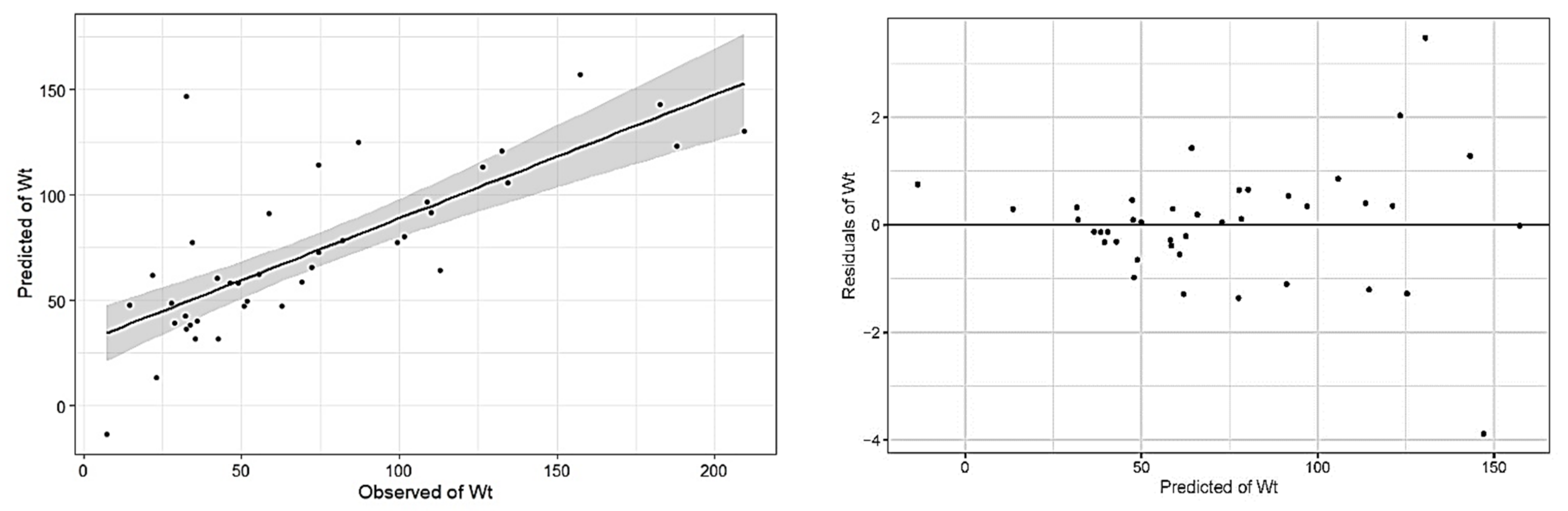
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- García-Mendoza, A.; Galván-V., R. Riqueza de las familias Agavaceae y Nolinaceae en México. Bot. Sci. 2017, 56, 7–24. [Google Scholar] [CrossRef] [Green Version]
- García-Mendoza, A. Distribution of agave (Agavaceae) in México. Cactus Succul. J. 2002, 74, 177–187, ISSN 0007-9367. [Google Scholar]
- Gschaedler, A.C.; Mora, A.G.; Ramos, S.M.C.; Vazquez, G.D.; Valdez, J.G. Panorama del aprovechamiento de los Agaves en México. In Red Temática Mexicana Aprovechamiento Integral Sustentable y Biotecnología de los Agaves; CIATEJ: Guadalajara, México, 2017; ISBN 978-607-97548-5-3. [Google Scholar]
- Barraza-Soto, S.; Domínguez-Calleros, P.A.; Antuna, E.M. La producción de mezcal en el municipio de Durango, México. Ra Ximhai Rev. Científica De Soc. Cult. Y Desarro. Sosten. 2014, 10, 65–74, e-ISSN 1665-0441. [Google Scholar] [CrossRef]
- Secretariat of the Interior. Secretaria de Gobernación: Diario Oficial de La Federación; SEGOB: Mexico City, Mexico, 2021. [Google Scholar]
- García-Barrón, S.E.; de Jesús Hernández, J.; Gutiérrez-Salomón, A.L.; Escalona-Buendía, H.B.; Villanueva-Rodríguez, S.J. Mezcal y Tequila: Análisis conceptual de dos bebidas típicas de México. Rev. Iberoam. De Vitic. Agroind. Y Rural. 2017, 4, 138–162, e-ISSN 0719-4994. [Google Scholar]
- Rosas Medina, I.; Colmenero Robles, A.; Naranjo JImenez, N.; Rodríguez García, J.H. El Mezcal de Durango, México. In Ingeniantes; Insttuto Tecnologico Superior de Misantla (ITSM): Veracruz, Mexico, 2013; ISSN 2007-3127. [Google Scholar]
- Narváez-Zapata, J.; Sánchez-Teyer, L. Agaves as a Raw Material: Recent Technologies and Applications. Recent Pat. Biotechnol. 2009, 3, 185–191. [Google Scholar] [CrossRef]
- Delgado-Lemus, A.; Torres, I.; Blancas, J.; Casas, A. Vulnerability and risk management of Agave species in the Tehuacán Valley, México. J. Ethnobiol. Ethnomed. 2014, 10, 53. [Google Scholar] [CrossRef] [Green Version]
- Revill, A.; Florence, A.; MacArthur, A.; Hoad, S.P.; Rees, R.M.; Williams, M. The Value of Sentinel-2 Spectral Bands for the Assessment of Winter Wheat Growth and Development. Remote Sens. 2019, 11, 2050. [Google Scholar] [CrossRef] [Green Version]
- Forkuor, G.; Zoungrana, J.-B.B.; Dimobe, K.; Ouattara, B.; Vadrevu, K.P.; Tondoh, J.E. Above-ground biomass mapping in West African dryland forest using Sentinel-1 and 2 datasets-A case study. Remote Sens. Environ. 2019, 236, 111496. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, X.; Zhu, X.; Dong, Z.; Guo, W. Estimation of biomass in wheat using random forest regression algorithm and remote sensing data. Crop J. 2016, 4, 212–219. [Google Scholar] [CrossRef] [Green Version]
- Weiss, M.; Jacob, F.; Duveiller, G. Remote sensing for agricultural applications: A meta-review. Remote Sens. Environ. 2019, 236, 111402. [Google Scholar] [CrossRef]
- Vuorinne, I.; Heiskanen, J.; Pellikka, P. Assessing Leaf Biomass of Agave sisalana Using Sentinel-2 Vegetation Indices. Remote Sens. 2021, 13, 233. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- Esse, C. Estimación del Índice de Sitio en Rodales de Nothofagus Dombeyi a Través de Herramientas de Teledetección Especial; SAFERE: Temuco, Chile, 2015; ISSN 0719-3726. [Google Scholar]
- Gallardo-Salazar, J.L.; Pompa-García, M.; Aguirre-Salado, C.A.; López-Serrano, P.M.; Meléndez-Soto, A. Drones: Tecnología con futuro promisorio en la gestión forestal. Rev. Mex. De Cienc. For. 2020, 11, 27–50. [Google Scholar] [CrossRef]
- Flores, D.; González-Hernández, I.; Lozano, R.; Vazquez-Nicolas, J.M.; Toral, J.L.H. Automated Agave Detection and Counting Using a Convolutional Neural Network and Unmanned Aerial Systems. Drones 2021, 5, 4. [Google Scholar] [CrossRef]
- Del Pozo, S.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; Felipe-García, B. Vicarious Radiometric Calibration of a Multispectral Camera on Board an Unmanned Aerial System. Remote Sens. 2014, 6, 1918–1937. [Google Scholar] [CrossRef] [Green Version]
- González, D.R.; Ramírez, R.C.; Corral, J.A.R.; Salcido, L.A.R.; Garnica, J.G.F. Detección de restricciones en la producción de agave azul (Agave tequilana Weber var. azul) mediante percepción remota. Rev. Terra Latinoam. 2017, 35, 259. [Google Scholar] [CrossRef] [Green Version]
- Ayamga, M.; Akaba, S.; Nyaaba, A.A. Multifaceted applicability of drones: A review. Technol. Forecast. Soc. Chang. 2021, 167, 120677. [Google Scholar] [CrossRef]
- Malveaux, C.; Hall, S.G.; Price, R. Using Drones in Agriculture: Unmanned Aerial Systems for Agricultural Remote Sensing Applications Montreal, 13–16 July 2014; American Society of Agricultural and Biological Engineers: Montreal, QC, Canada, 2014. [Google Scholar] [CrossRef]
- Hogan, S.D.; Kelly, M.; Stark, B.; Chen, Y. Unmanned aerial systems for agriculture and natural resources. Calif. Agric. 2017, 71, 5–14. [Google Scholar] [CrossRef] [Green Version]
- Haghighattalab, A.; González Pérez, L.; Mondal, S.; Singh, D.; Schinstock, D.; Rutkoski, J.; Ortiz-Monasterio, I.; Singh, R.P.; Goodin, D.; Poland, J. Application of unmanned aerial systems for high throughput phenotyping of large wheat breeding nurseries. Plant Methods 2016, 12, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Ayamga, M.; Tekinerdogan, B.; Kassahun, A.; Rambaldi, G. Developing a policy framework for adoption and management of drones for agriculture in Africa. Technol. Anal. Strat. Manag. 2020, 33, 970–987. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
- Gilabert, M.A.; González-Piqueras, J.; García-Haro, J. Acerca de los índices de vegetación. Rev. Teledetec. 1997, 8, 1–10. [Google Scholar]
- Gitelson, A.A. Wide Dynamic Range Vegetation Index for Remote Quantification of Biophysical Characteristics of Vegetation. J. Plant Physiol. 2004, 161, 165–173. [Google Scholar] [CrossRef] [Green Version]
- Narasimhan, B.; Srinivasan, R. Development and evaluation of Soil Moisture Deficit Index (SMDI) and Evapotranspiration Deficit Index (ETDI) for agricultural drought monitoring. Agric. For. Meteorol. 2005, 133, 69–88. [Google Scholar] [CrossRef]
- López-Granados, F. Uso de Vehículos Aéreos no tripulados (UAV) para la evaluación de la producción agraria. Ambienta 2013, 105, 40–52, ISSN 1577-9491. [Google Scholar]
- Roy, D.P.; Kovalskyy, V.; Zhang, H.K.; Vermote, E.F.; Yan, L.; Kumar, S.S.; Egorov, A. Characterization of Landsat-7 to Landsat-8 reflective wavelength and normalized difference vegetation index continuity. Remote Sens. Environ. 2016, 185, 57–70. [Google Scholar] [CrossRef] [Green Version]
- De La Casa, A.; Ovando, G. Integración del Índice de Vegetación de la Diferencia Normalizada (NDVI) y del Ciclo Fenológico de Maíz para Estimar el Rendimiento a Escala Departamental en Córdoba, Argentina. Agric. Téc. 2007, 67, 362–371. [Google Scholar] [CrossRef] [Green Version]
- Aguilar, C.G. Aplicación de índices de vegetación derivados de imágenes satelitales para análisis de coberturas vegetales en la provincia de Loja, Ecuador. CEDAMAZ 2015, 5, 30–41, e-ISSN 1390-5902. [Google Scholar]
- Qubaa, A.R.; Aljawwadi, T.A.; Hamdoon, A.N.; Mohammed, R.M. Using uavs/drones and vegetation indices in the visible spectrum to monitoring agricultural lands. Iraqi J. Agric. Sci. 2021, 52, 601–610, ISSN 0075-0530; e-ISSN 2410-0862. [Google Scholar]
- Rouse, J.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. In Proceedings of the Third Earth Resources Technology Satellite-1 Symposium NASA SP-351, Greenbelt, MD, USA, 1 January 1974; pp. 301–317. Available online: https://ntrs.nasa.gov/citations/19740022592 (accessed on 10 June 2022).
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Jiang, Z.; Huete, A.R.; Didan, K.; Miura, T. Development of a two-band enhanced vegetation index without a blue band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Birth, G.S.; McVey, G.R. Measuring the Color of Growing Turf with a Reflectance Spectrophotometer. Agron. J. 1968, 60, 640–643. [Google Scholar] [CrossRef]
- Quantum GIS Geographic Information System. Open Source Geospatial Foundation Project. Available online: http://www.qgis.org/it/site/ (accessed on 10 June 2022).
- Team, R.C. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2013. [Google Scholar]
- Ripley, B.; Venables, B.; Bates, D.M.; Hornik, K.; Gebhardt, A.; Firth, D.; Ripley, M.B. Package ‘mass’. Cran R 2013, 538, 113–120. [Google Scholar]
- Hijmans, R. Raster: Geographic Data Analysis and Modeling (R Package Version 3.3-13) [Computer Software]. 2020. Available online: https://CRAN.R-project.org/package=raster (accessed on 15 April 2022).
- Carlson, T.N.; Ripley, D.A. On the relation between NDVI, fractional vegetation cover, and leaf area index. Remote Sens. Environ. 1997, 62, 241–252. [Google Scholar] [CrossRef]
- Hassan, M.A.; Yang, M.; Rasheed, A.; Yang, G.; Reynolds, M.P.; Xia, X.; Xiao, Y.; He, Z. A rapid monitoring of NDVI across the wheat growth cycle for grain yield prediction using a multi-spectral UAV platform. Plant Sci. 2018, 282, 95–103. [Google Scholar] [CrossRef]
- Broge, N.H.; Leblanc, E. Comparing prediction power and stability of broadband and hyperspectral vegetation indices for estimation of green leaf area index and canopy chlorophyll density. Remote Sens. Environ. 2001, 76, 156–172. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W.; Kooistra, L.; van den Brande, M.M.M. Using Sentinel-2 Data for Retrieving LAI and Leaf and Canopy Chlorophyll Content of a Potato Crop. Remote Sens. 2017, 9, 405. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Z.; Huete, A.; Kim, Y.; Didan, K. 2-band enhanced vegetation index without a blue band and its application to AVHRR data. In Remote Sensing and Modeling of Ecosystems for Sustainability IV; SPIE: Tucson, AZ, USA, 2007. [Google Scholar] [CrossRef]





| Component | Model | Parameter | R2 | RMSE |
|---|---|---|---|---|
| Total green biomass (Wt) | = 0.308681 = −0.00229 = 0.000018 | 0.79 | 28.99 |
| Band | Wavelength (µm) | Spatial Resolution (cm) | Abbreviation |
|---|---|---|---|
| Green | 0.54–0.57 | 5 | B1 |
| Red | 0.65–0.68 | 5 | B2 |
| Near-infrared | 0.78–0.90 | 5 | NIR |
| Variable | Mínimum | Máximum | Mean | Standard Deviation |
|---|---|---|---|---|
| D (cm) | 54.4 | 205 | 126.06 | 36.75 |
| At (cm) | 46 | 157 | 101.53 | 24.65 |
| Wt (Kg) | 7.26 | 209.39 | 71.81 | 48.73 |
| Model | Parameter | R2 | RMSE |
|---|---|---|---|
| Wt = β0 + β1B1 + β2B2 + β3NDVI + β4GNDVI + β5EVI2 + β6SAVI | β0 = −528.17 | 0.59 | 32.06 kg |
| β1 = −33.08 | |||
| β2 = 36.43 | |||
| β3 = 859.66 | |||
| β4 = −11,476.71 | |||
| β5 = 7035.82 | |||
| β6 = −15.79 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
López-Serrano, P.M.; Núñez-Fernández, G.A.; Alvarado-Barrera, R.; García-Montiel, E.; Ramírez-Aldaba, H.; Bocanegra-Salazar, M. Biomass Estimation of Agave durangensis Gentry Using High-Resolution Images in Nombre de Dios, Durango. Drones 2022, 6, 148. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6060148
López-Serrano PM, Núñez-Fernández GA, Alvarado-Barrera R, García-Montiel E, Ramírez-Aldaba H, Bocanegra-Salazar M. Biomass Estimation of Agave durangensis Gentry Using High-Resolution Images in Nombre de Dios, Durango. Drones. 2022; 6(6):148. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6060148
Chicago/Turabian StyleLópez-Serrano, Pablito Marcelo, Gerardo A. Núñez-Fernández, Rolando Alvarado-Barrera, Emily García-Montiel, Hugo Ramírez-Aldaba, and Melissa Bocanegra-Salazar. 2022. "Biomass Estimation of Agave durangensis Gentry Using High-Resolution Images in Nombre de Dios, Durango" Drones 6, no. 6: 148. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6060148