1. Introduction
Thermoacoustic engines are a new class of energy conversion devices (prime movers, refrigerators and heat pumps) whose operation relies on the interaction between heat and sound in close proximity of solid surfaces, a phenomenon identified as the “thermoacoustic effect” [
1,
2]. Since in these devices the synchronization among the compression, expansion and heat transfer phases of the thermodynamic gas cycle is naturally accomplished by an acoustic wave, a number of technological benefits result. First of all, there is the complete absence of moving mechanical parts (pistons, sliding seals,
etc.) which leads to engineering simplicity, reliability, longevity and low maintenance costs. Secondly, they are intrinsically low cost devices, being constituted basically by a small number of standard components made of inexpensive and common materials. Furthermore, they use environment friendly working fluids, can be employed in a large variety of applications (those involving heating, cooling or power generation) and can be driven by different power sources (gas/biomass combustion, solar energy, waste heat,
etc.). These characteristics makes thermoacoustic technology a discipline of relevant interest for the energy industry giving it a primary position among emerging renewable energy technologies.
A typical thermoacoustic device consists of: (a) an acoustic network (acoustic resonator), (b) an electro-acoustic transducer, (c) a porous solid medium (namely a regenerator in travelling-wave systems [
3] or a stack in standing-wave systems [
4]) and (d) at least a pair of heat exchangers (HXs) [
5]. The stack/regenerator is the component where the desired heat/sound energy conversion takes place. “Hot” and “cold” heat exchangers, placed in close proximity of both ends of the stack/regenerator, absorb or supply from its ends thus enabling heat communication with external heat sources and sinks.
Although thermoacoustic HXs constitute fundamental components of thermoacoustic devices reliable and unequivocal design criteria are still lacking. This is due to the fact that the flow is oscillatory and the existing knowledge for steady flow arrangements is of little practical value [
6]. Heat exchangers constitute, in addition to the stack/regenerator, the highly dissipative components of thermoacoustic engines. Their porous structure entails, in fact, considerable flow resistance while steep thermal gradients are generally imposed on them to sustain the required heat fluxes. When designing efficient heat exchangers aimed at sustaining a target heat load the fin length along the direction of acoustic oscillation and the fin interspacing should be simultaneously optimized in order to:
provide the heat transfer surface area compatible with minimum acoustic power loss caused by thermal and viscous dissipation;
provide the temperature drop between the HX and the adjacent fluid compatible with minimum thermal irreversibility associated to heat transfer.
An optimized heat exchanger should be able to achieve high transfer rates under small temperature differences in conjunction to low acoustic dissipation. From these arguments it follows that a second law analysis of the thermodynamic irreversibility affecting the operation of these components could be helpful in their design with the aim of improving the overall system performance. In a previous paper [
7] the author developed a simplified 2D computational model to evaluate the time-averaged entropy generation rate distribution within the stack and adjoining HXs of a standing-wave termoacoustic device working in the refrigeration mode. The development of the model was motivated by the need to investigate on the structure of the transverse temperature gradients/heat fluxes (and associated thermal irreversibility) affecting the HXs and the edges of the stack facing them. The term “transverse” refers here to the direction normal to stack-plates/HX-fins surfaces as well as to the fluid particle direction of oscillation (the longitudinal direction). Such an analysis cannot be accomplished by the standard linear thermoacoustic theory [
1,
2] owing to its 1D character and the fact it is based on the so called “mean field approximation” [
8] (time averaged temperature of the gas in a pore equal to the time averaged temperature of the adjoining solid plates). The study evidenced how the stack-HXs junctions act as strong sources of thermal irreversibility. Furthermore, the optimal settings which maximize the performance of the system were derived by a parametric optimization procedure based on entropy generation minimization. In that work, however, the effect of the configuration of each HX on the other was not investigated despite the fact that the each HX can potentially influence the other through modification of the temperature distribution in the coupled stack/HXs system. Moreover, it lacked a systematic investigation on the dependence of the entropy generation rate on the HX fin length and spacing that could highlight the role of heat transfer and fluid friction on the component irreversibility behavior. Therefore, this work is driven by the need to integrate the results of the previous work by addressing the above discussed issues. In this study, in particular, minimum in entropy generation is applied as a design criterion for the simultaneous optimization of the two HXs (the fin length and spacing of each one at the same time). Some general information on the optimal settings which maximize the HX performance is also derived.
2. Formulation
The 2D low Mach number computational model used in this study is the same as that applied in [
7,
9] so only a brief description is given here. For additional information the reader is directed to the original references [
7,
9]. Synthetically, the model integrates the thermoacoustic equations of the standard linear theory into an energy balance-based numerical calculus scheme. It accounts for hydrodynamic and diffusive heat transport in the gas (a newtonian working fluid obeying the ideal gas state equation) along both the longitudinal and transverse directions, diffusive heat transport in the solid plate/fin, temperature dependent thermophysical gas/solid parameters and thermoviscous losses.
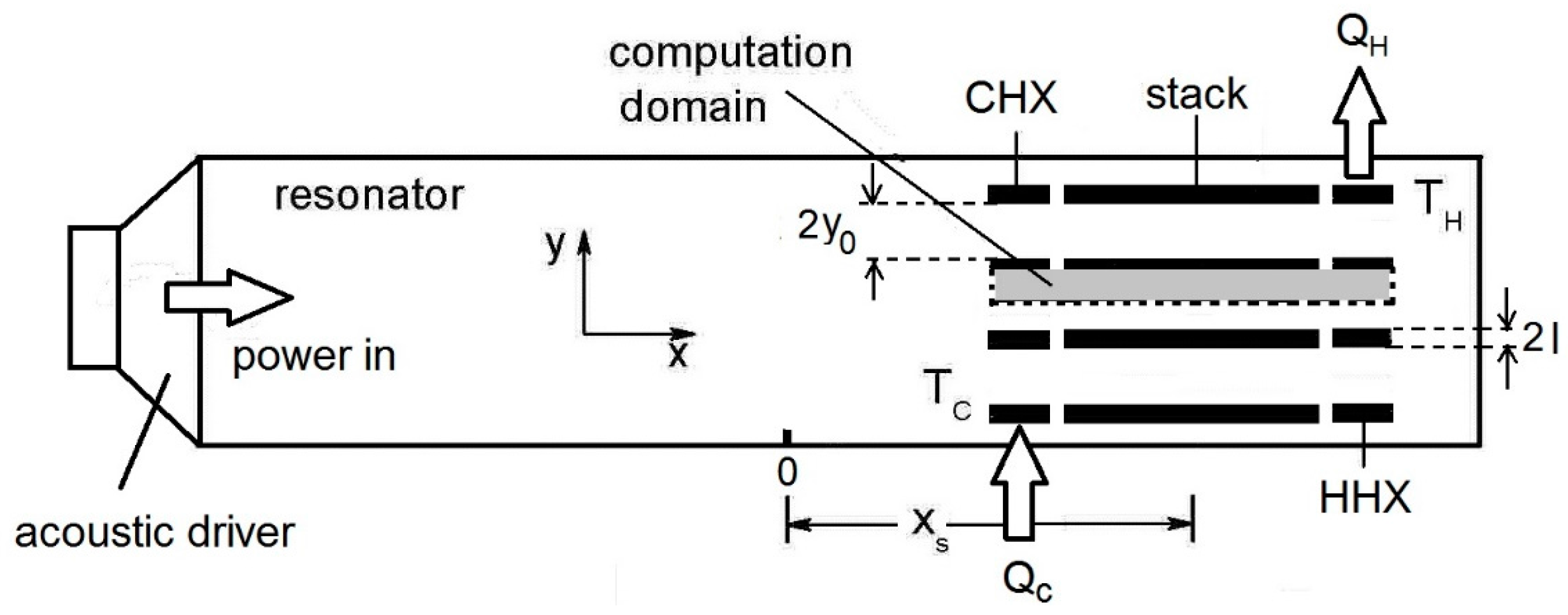
The modeled system is a stack of parallel plates, of length,
LS, sandwiched between “hot” and “cold” parallel-fin HXs of length
LH and
LC respectively. These last are treated as two isothermal surfaces maintained at temperature
TH and
TC. The stack-HXs assembly is located at a distance
xs from the center of a half-wavelength (λ/2) gas filled resonator sustaining a standing acoustic wave as shown in
Figure 1. The system is supposed to work in the refrigeration mode so heat is pumped from the cold to the hot HX through the stack along the positive longitudinal
x direction (see
Figure 1). To simplify numerical implementation stack plates and HX fins are modeled with the same spacing (2
y0) and thickness (2
l) with the HX fins aligned to the stack plates and separated from them by a small finite gap (in order to reduce adverse heat conduction leaks from the cold to the hot HX).The periodicity of the stack and HXs structures along the transverse direction normal to the plates/fins (the
y direction) allows calculations to be performed in a single channel of the stack-HXs assembly and in the couple of plates/fins enclosing it. The computational domain is further reduced by symmetry from half a gas duct to half a plate/fin as indicated by the light grey area together with the coordinate system used (
y = 0 is at the center of the fluid gap).
Figure 1.
Schematic illustration of the modeled thermoacoustic refrigerator with magnified view of the simulation domain (grey area). Plate interspacing and thickness are not in scale.
Figure 1.
Schematic illustration of the modeled thermoacoustic refrigerator with magnified view of the simulation domain (grey area). Plate interspacing and thickness are not in scale.
As for the acoustic field, the stack is considered to be significantly shorter than the acoustic wavelength and not intrusive so that the oscillating pressure and velocity can be described in the stack-HXs neighbourhood by a 1D lossless standing wave:
where
p1 is the amplitude of the dynamic pressure,
PA is the amplitude of the dynamic pressure at a pressure antinode,
vx1 is the amplitude of the longitudinal particle velocity,
k is the wave number (
k = 2π/λ) and
a is the sound velocity. As emphasized by Swift [
1], this approximation (the “short-stack” approximation) should be not too restrictive. Equations derived under this simplifying assumption should be able to describe the performance of realistic devices within about a factor of 2.
The gas temperature field is governed by the general equation of energy conservation [
9] whose time averaged (over one or more acoustic cycles) version is:
where
is the energy flux density vector and where over-bar means time-averaged variable. In our 2D model we consider only the
x and
y components of
[
10]:
where ω is the angular frequency, ρ is the gas density,
h is the specific enthalpy,
t is the time,
K is the gas thermal conductivity,
v is the velocity (whose components are
vx and
vy),
T is the temperature and:
are the components of the viscous stress tensor. In the last expressions the
x velocity gradients have been disregarded, being of order δ
v/λ smaller than the
y velocity gradients ((δ
v = 2η/ρ
0ω)
1/2 being the “viscous penetration depth” whose definition includes the shear viscosity coefficient, η, the static density, ρ
0, and ω). To proceed further we observe that in the low Mach number regime (considered in this work) any acoustic variable ξ can be expressed in complex notation by the conventional first-order expansion ξ(
x,
y,
t) = ξ
0(
x,
y) + Re{ ξ
1(
x,
y)
ejωt} where
j is the imaginary unit, ξ
0 is the (real) mean value, ξ
1 the (complex) amplitude of oscillation and where Re{ }denotes the real part. Making use of this notation and retaining only terms up to second order Equations (3) and (4) become:
where
T1 is the amplitude of the oscillating temperature,
cp is the isobaric specific heat of the gas,
T0 is the time-averaged temperature,
vx1 is the amplitude of the longitudinal velocity,
vy1 is the amplitude of the transverse velocity and where tilde indicates complex conjugation. The explicit expressions of these equations to be implemented in the model are obtained by substitution of the standard equations of the classical thermoacoustic theory for
T1,
vx1, ∂
vx1/∂
y,
vy1 and ∂
vy1/∂
y inside a gas pore [
1,
7,
8,
9], where the longitudinal pressure gradient
dp1/
dx at the stack location is calculated by imposing the continuity of the volume flow rate at the entrance of the stack/HXs assembly through the equation:
The result is:
where:
and where the “blockage ratio”
BR =
A/
Adct = 1/(1 +
l/
y0) describes the porosity of the stack-HXs assembly (
Adct being the cross sectional area of the resonator duct and
A the cross sectional area of the stack-HXs assembly open to gas flow), β is the gas thermal expansion coefficient, Pr is the Prandtl number, δk = (2K/ρ
0Cpω))
1/2 is the “thermal penetration depth” and where Im{ } denotes the imaginary part. We note that these energy flux densities can be identified with heat flux densities because in the short stack approximation the work flux contribution to the total energy flux is small [
1]. The energy fluxes along the
x and
y directions inside the solid plates/HXs are expressed through the Fourier law since heat conduction is here the relevant mechanism of energy transport.
The calculation of the steady-state two-dimensional time-averaged temperature distribution both in the gas and in the solid is performed using a finite difference methodology where temperature spatial gradients are discretized using first order nodal temperature differences. To this end, the computational domain is subdivided using a rectangular grid. In the x direction the computation mesh size is typically 0.005 LS while in the y direction the computation mesh size is typically 0.02 y0.
The imposed boundary conditions took into account:
- (a)
the symmetry on the central lines of a gas pore (
y = 0) and of a solid plate/fin (
y =
y0 +
l)
- (b)
the continuity of temperature and transverse heat fluxes at the gas-solid interfaces (
y =
y0):
Ksolid being the thermal conductivity of the solid material (stack plates or HX fins);
- (c)
the vanishing heat flux at the HX fin terminations (
y0 ≤
y ≤
y0 +
l) facing the resonator duct and at the HX pore ends (0 ≤
y ≤
y0) facing the resonator duct (gas oscillations outside the HXs are adiabatic and thus the thermoacoustic effect vanishes):
As for the separation gap between the HX fin and the stack edge, this last was arbitrarily set equal to δ
k and, as a further simplifying hypothesis, the slice of gas enclosed in it is assumed at rest. Applying Equation (2) to impose local energy balance in each cell of the computational grid, a system of quadratic algebraic equations with respect of the unknown variable
T0 is generated. The system is solved by a code developed by the author in FORTRAN-90 language which executes the recursive Newton-Raphson method [
11]. At each iteration the system of linear algebraic equations providing the temperature corrections for the next step is solved using a LU decomposition with partial pivoting and row interchanges matrix factorization routine. The latter is taken from the LAPACK library routines available online at [
12], where details about accuracy, computation cost,
etc. can be found.
Once the time-averaged temperature distribution is known, it can be substituted in Equation (11) and in the Fourier law to determine the energy flux distributions along the
x and
y directions both in the gas and in the solid plates/fins and other relevant variables. Specifically, in this work it is used to calculate
—the time-averaged entropy generation rate per unit volume due heat transfer irreversibility (including thermal dissipation), and
—the time-averaged entropy generation rate per unit volume due to fluid friction irreversibility (neglecting bulk viscosity) through the formulas [
10]:
having neglected, as before, the longitudinal temperature and velocity gradients respect to the transverse ones and where Ф, the dissipation term, has the following expression [
10]:
Making use again of the standard equations of the classical thermoacoustic theory for
T1,
vx1, ∂
vx1/∂
y,
vy1 and ∂
vy1/∂
y with:
Equations (26) and (27) can be put in the form:
suitable for calculation.
Once local entropy generation rates are obtained, they can be conveniently integrated over an arbitrary control volume
V to obtain volume averaged entropy changes:
(where brackets < > indicate a volume-averaged quantity) or the total time averaged entropy generation in a component (stack or HXs) as:
where subscripts “
s”, “
HHX” and “
CHX” refer to the stack, hot HX and cold HX, respectively. Previous validation of the model against experimental data and results of analogous computational models can be found in [
7,
9].
3. Results and Discussion
In the optimization procedure of the HXs a standing-wave thermoacoustic device working in the refrigeration mode is considered. The configuration parameters are arbitrarily selected, even if they broadly respond to well known design criteria such as the use of low-Prandtl noble gases, high static pressures, stack located in proximity of the pressure antinode to reduce viscous dissipation, stack plate interspacing ranging between 2 and 4 δ
k,
etc.. Helium at a static pressure of 3 bar and at a mean temperature of 300 K is assumed as working fluid (η = 199 × 10
−7 N·s·m
−2,
K = 0.152 W·m
−1·K
−1,
a = 1008 m·s
−1, Pr = 0.68 at
T = 300 K). It is considered enclosed in a half-wavelength resonator (acoustic wavelength λ = 6 m) resonating at 168 Hz (for which δ
k = 3.39 × 10
−4 m) and having a circular cross section of radius 0.05 m Supposedly, the stack is in stainless steel (
KS = 14.9 W·m
−1·K
−1 at 300 K) while the HXs material is copper (
Kcopper = 401 W·m
−1·K
−1 at 300 K). In all runs the following parameters were fixed to the following constant values: (a) drive ratio (the ratio of the dynamic pressure amplitude in a pressure antinode to the static pressure)
DR = 8.33%; (b) stack position
xS = 1.3 m; (c) stack length
LS = 0.13 m; (d) temperature of the cold HX
TC = 273.16 K; (e) temperature of the hot HX
TH = 300 K. For these operating conditions the dynamic Reynolds number (
vx1δ
vρ
0/η) and Mach number (
PA/ρ
0a2) resulted always smaller than 500 and 0.1 respectively, the values over which turbulence and non-linear saturation effects are expected to affect fluid dynamics [
1].
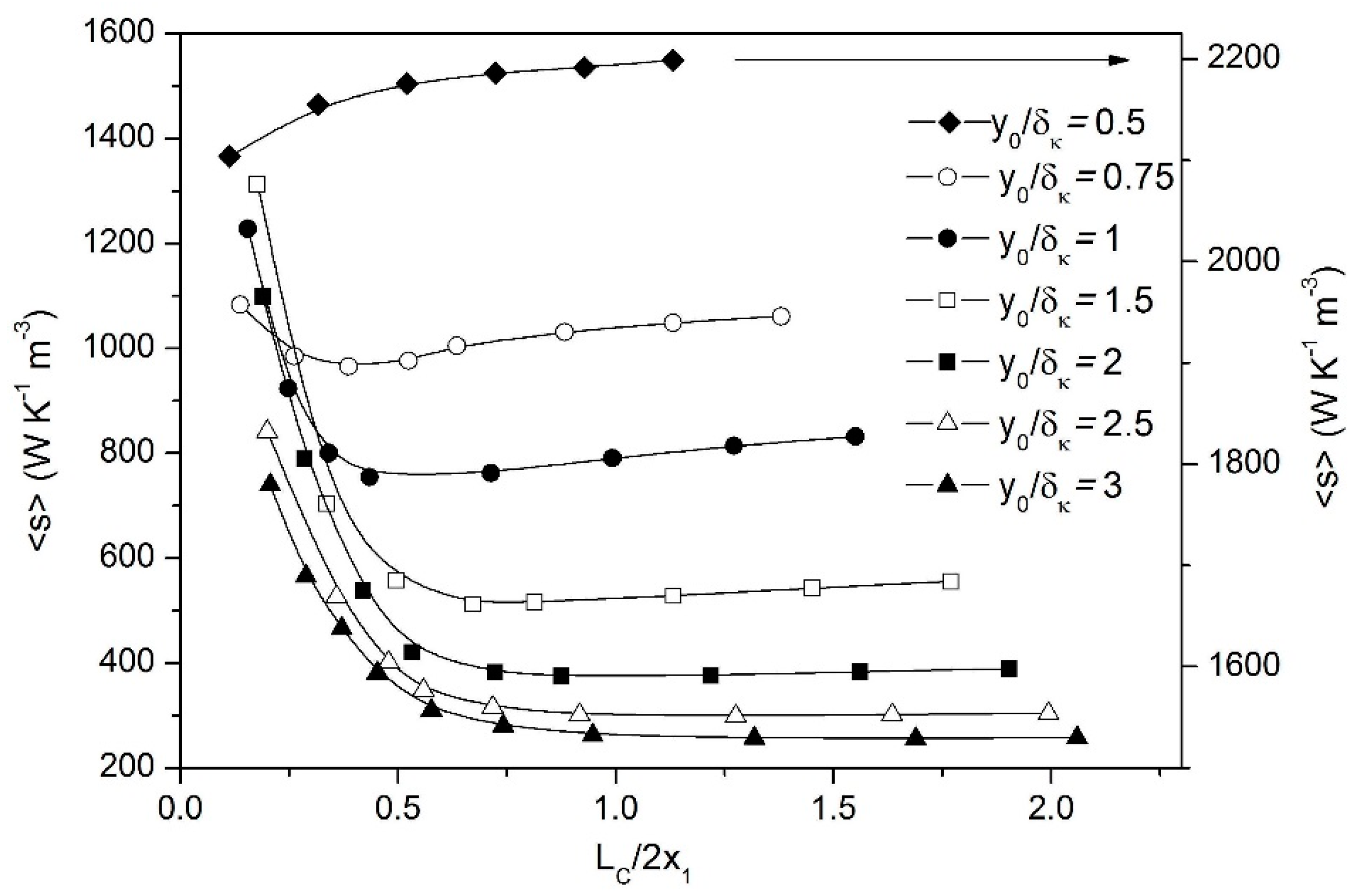
The dependence of the entropy generation on fin spacing and length can be observed in
Figure 2, where the entropy generation rate per unit volume
averaged over the cold HX is plotted as a function of the fin length
LC at selected fin interspacing. In each run
LH was held fixed to 2
x1, the peak-to-peak particle displacement amplitude (consistently with the argument put forward by Swift [
1]). The strong dependence of
on
LC at small
LC values is caused essentially by the thermal diffusion term: the increase of the fin length or, equivalently, of the surface area available for heat transfer decreases, in fact, the transverse temperature gradients required to sustain the heat flux. The viscous term does not contribute to the variation of
with
LC since the dissipation due to viscous friction is proportional to the fin area which, in turn is proportional to
LC and we are considering entropy generation values normalized by the volume enclosed between two fins. Conversely, the strong dependence of
on
y0 for
y0 < δ
k ( ≈ δ
v) is mainly due to the viscous term since viscous dissipation maximizes for for
y → 0 (on the fin surface) and since the velocity (and associated viscous dissipation) grows ad decreasing
y0 values. This fact is clearly reflected by the monotonic growth with
LC of the curve at
y0 = 0.5 δ
k where the viscous term dominates over the thermal diffusion term. At
y0 ≈ δ
k the thermal diffusion term is comparable (or overcomes) the viscous one since the thermal dissipation maximizes at the distance
y0 = δ
k from the plate as well as the thermoacoustic heat transport which causes an increase of the transverse temperature gradients at the HXs. The trend for
y0 > δ
k simply reflects the circumstance that the thermal and viscous dissipation are relevant only within the thermal and viscous boundary layers. Finally, an interesting feature observable in
Figure 2 is the existence of minima in correspondence of fin lengths of the order of the particle displacement amplitude at almost all the
y0 values considered. If the minimum of each curve is selected as optimal HX fin length, this last results to be an increasing function of the fin spacing.
Figure 2.
The entropy generation rate per unit volume averaged over the cold HX as a function of the fin length LC at selected fin spacing. Continuous lines are a guide for the eye.
Figure 2.
The entropy generation rate per unit volume averaged over the cold HX as a function of the fin length LC at selected fin spacing. Continuous lines are a guide for the eye.
The strong dependence of the entropy generation rate on both the fin length and the fin spacing suggests that minimization in entropy generation could constitute an effective design criteria for selecting the optimal HXs configuration in correspondence of given operating conditions. In this work this design strategy is applied to the model system under study by undertaking a parametric analysis of the influence of the main geometric parameters of the HXs—namely, the fin interspacing 2y0, the hot HX length LH and the cold HX length LC—on the entropy generation rates.
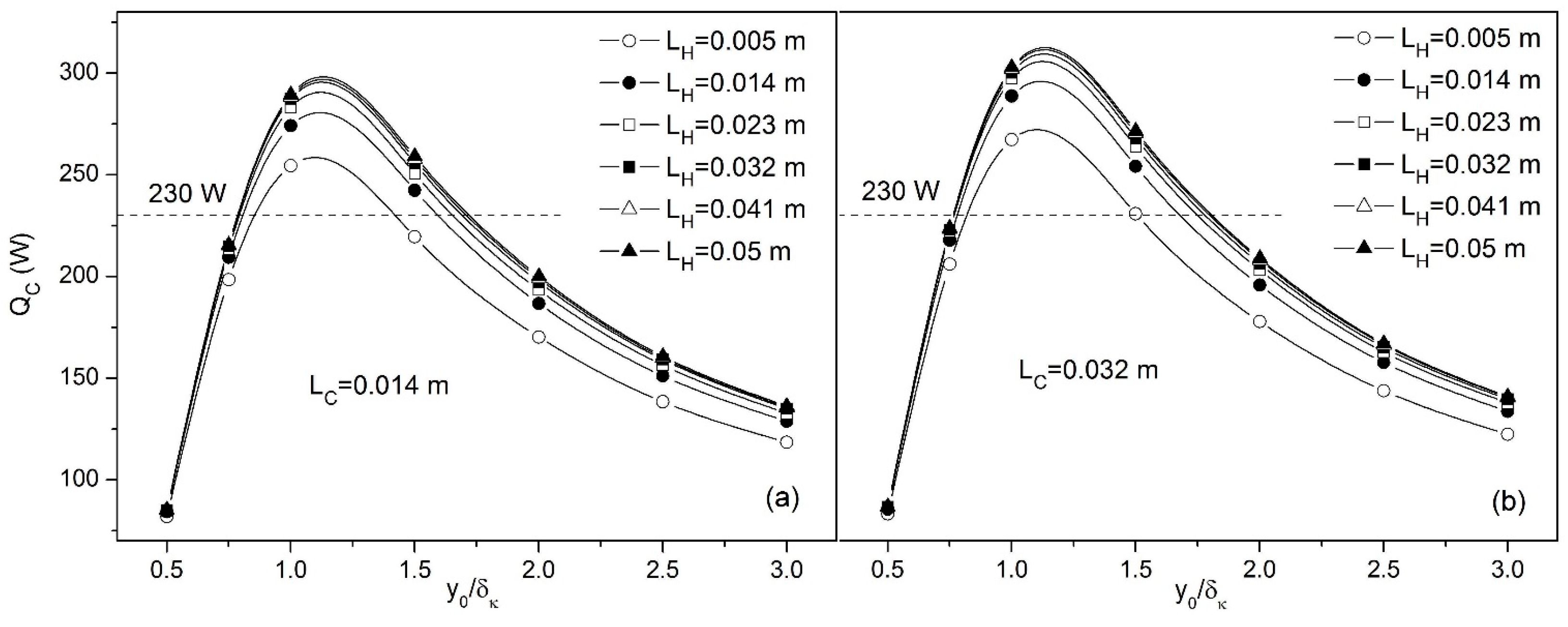
The analysis started by studying the dependence on
LC,
LH and
y0 of the total cooling rate
sustained by the cold HX calculated as:
П being the perimeter of the cold HX cross section in contact with the gas. A typical result is shown in
Figure 3a,b where
is plotted as a function of
y0 for
LC fixed to 0.014 and 0.032 m and
LH ranging from 0.005 m to 0.05 m (note that 2
x1 = 0.0283 m for
y0 = 1.5 δ
k at the selected operation conditions). The graphs indicate that the optimal fin interspacing where the cooling power maximizes depends both on
LC and
LH simultaneously. The graphs also show that, for each fin length
LC, a given level of cooling power can be achieved by different combinations of
LH and
y0 values. In particular, for a given length of the cold HX, there are two fin interspacing values that could produce the desired refrigerating power.
Figure 3.
The cooling power as a function of fin interspacing at selected lengths of the hot HX for LC = 0.014 m (a) and LC = 0.032 m (b). Continuous lines are a guide for the eye.
Figure 3.
The cooling power as a function of fin interspacing at selected lengths of the hot HX for LC = 0.014 m (a) and LC = 0.032 m (b). Continuous lines are a guide for the eye.
The second step of the procedure consisted in fixing a set point level for the cooling power and, subsequently, in determining the combinations of LC, LH and y0 values giving rise to the above level.
The selected set point level for
is indicated in
Figure 3a,b by the horizontal dotted line and corresponds to
= 230 W. The intercept of this line with the
curves determines the combinations of
LH and
y0 values that produce the required cooling power at the considered
LC. The procedure has thus been repeated for all the
LC values considered (
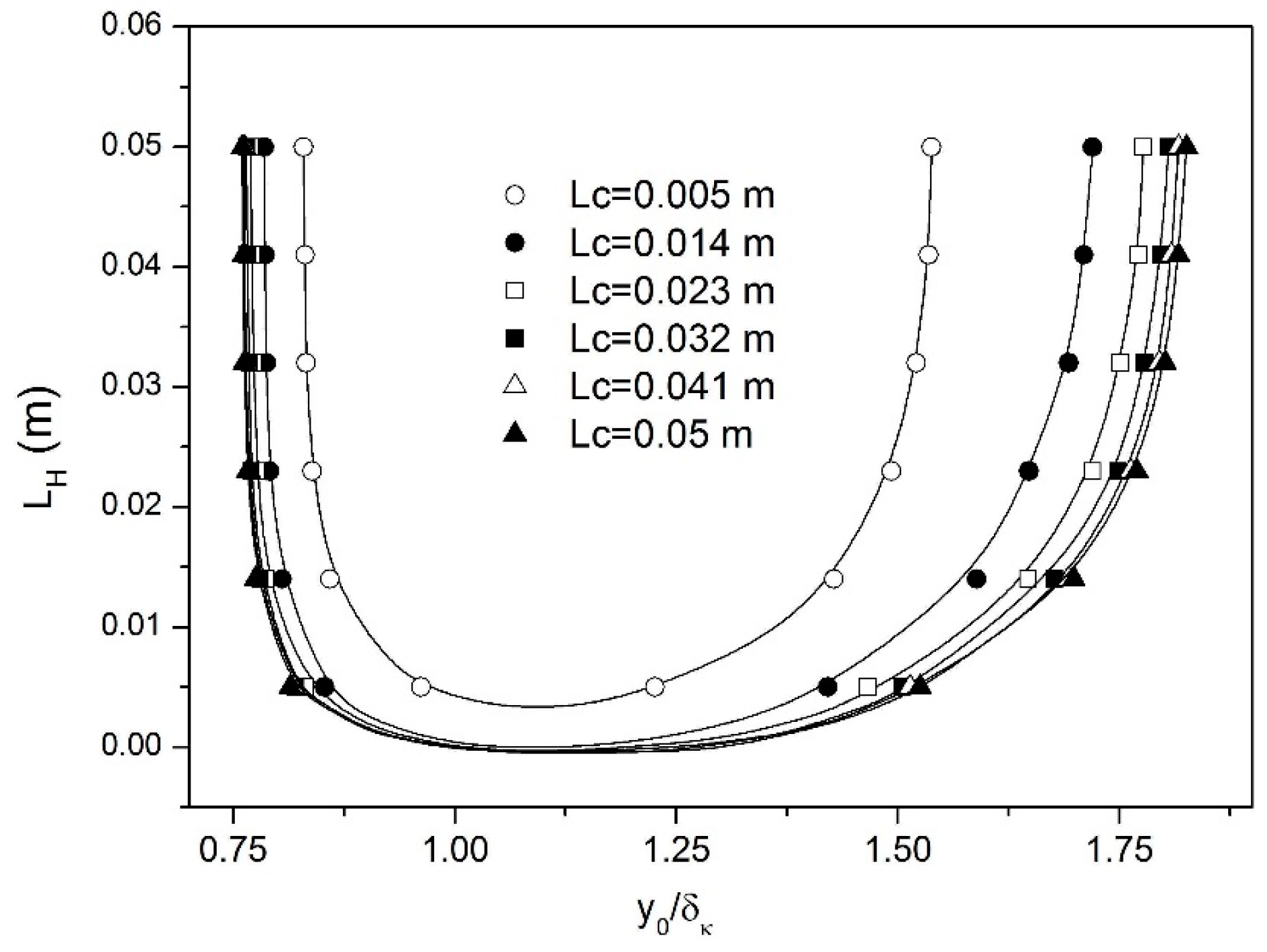
LC = 0.005, 0.014, 0.023, 0.032, 0.041, 0.05). The results are summarized in
Figure 4 where the relevant
LC,
LH and
y0 combinations are shown.
Figure 4.
The combinations of LC, LH and y0 values giving rise to a constant cooling power of 230 W at the selected operation point. Continuous lines are a guide for the eye.
Figure 4.
The combinations of LC, LH and y0 values giving rise to a constant cooling power of 230 W at the selected operation point. Continuous lines are a guide for the eye.
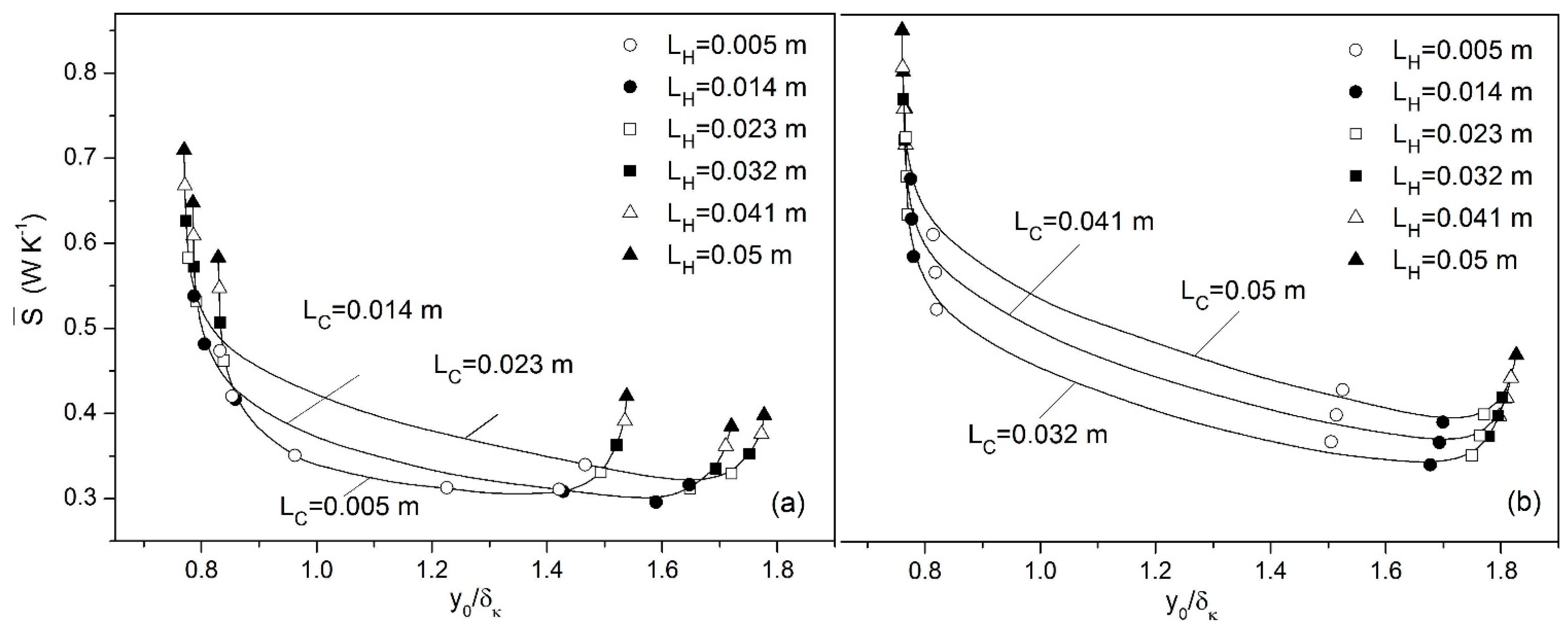
In the final step the total entropy generation rate was computed in the resulting combinations of LC, LH and y0 values to find the existence of minima to be selected as favorable configurations for the HXs.
In these points the device should produce the desired output cooling level with minimum irreversibility (and best performance). Results are shown in
Figure 5a,b where the entropy generation rate produced in all the stack-HXs assembly is reported as a function of the fin interspacing at selected
LC values (note that each curve is characterized by different
LH values). An inspection of the graphs reveals that for each length of the cold HX the entropy generation rate minimizes in correspondence of a unique combination of
LH,
y0 values. The lowest minimum, representing the best configuration for the HXs at the modeled operating conditions, is characterized by the values
LC ≈
LH =
x1 and
y0/δ
k = 1.589. The important result found here is that the optimal HX fin length along the longitudinal direction is of the order of the gas displacement amplitude, a statement originally deduced by Swift on the basis of a Lagrangian picture of the inter-element heat transfer but recently confirmed by both numerical [
12,
13] and experimental [
14,
15] investigations.
Figure 5.
The total time averaged entropy generation rate evaluated in the combinations of LC, LH and y0 values producing an output cooling power equal to 230 W at the selected operation point. In (a) 0.005 m ≤ LC ≤ 0.023 m. In (b) 0.032 m ≤ LC ≤ 0.05 m. Continuous lines are a guide for the eye.
Figure 5.
The total time averaged entropy generation rate evaluated in the combinations of LC, LH and y0 values producing an output cooling power equal to 230 W at the selected operation point. In (a) 0.005 m ≤ LC ≤ 0.023 m. In (b) 0.032 m ≤ LC ≤ 0.05 m. Continuous lines are a guide for the eye.
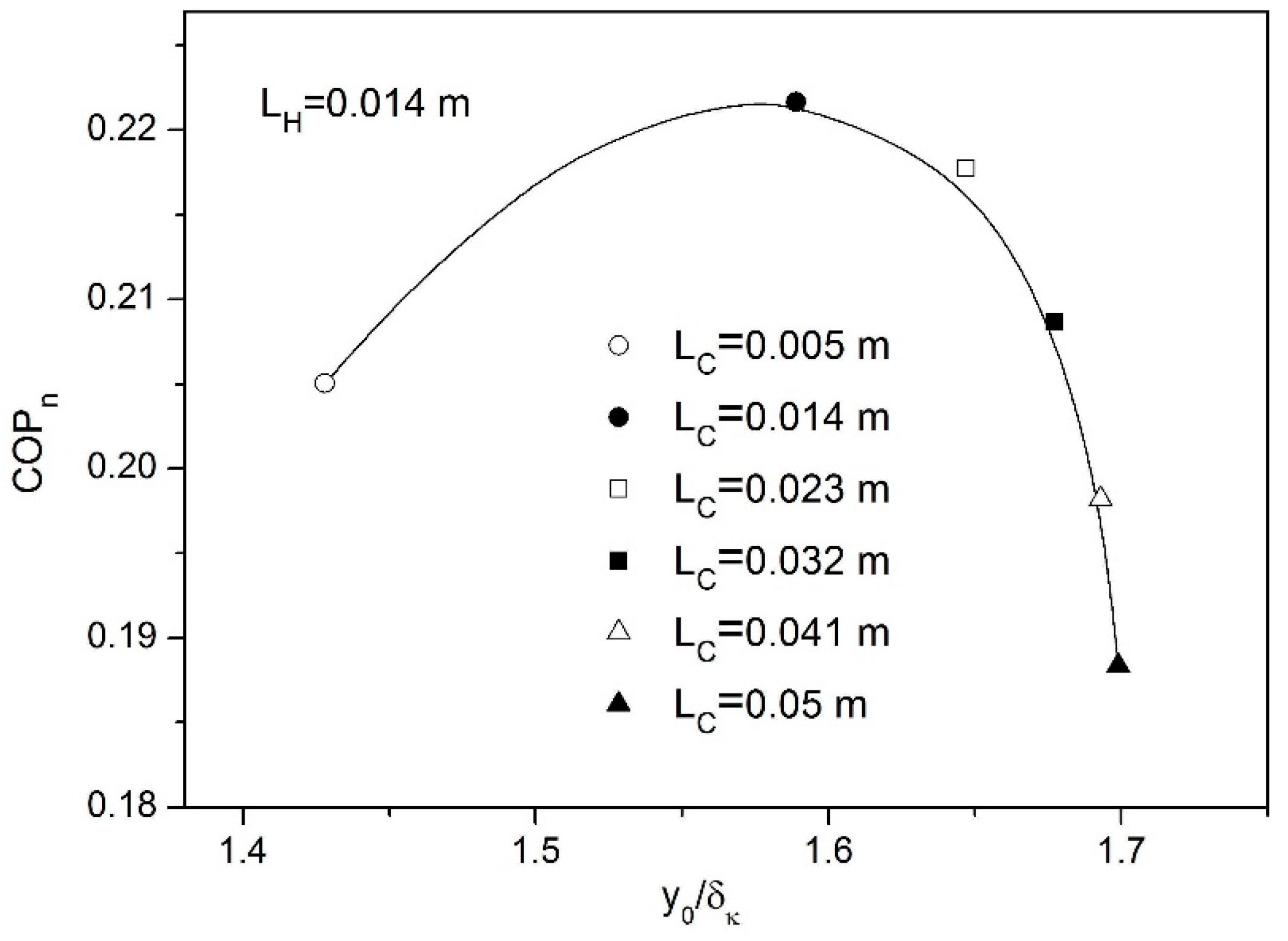
To verify if the performance of the device maximizes in correspondence of the optimal deduced configuration its coefficient of performance normalized by COP
C =
TC/(
TH −
TC) (the Carnot coefficient of performance) has been calculated in all the six minimum entropy configurations corresponding to the six investigated
LC values reported in
Figure 5 as:
where
, the time-averaged total acoustic power absorbed in the entire stack-HXs assembly has been in turn calculated as:
where
L =
LC +
LS +
LH and where
, the time-averaged acoustic power absorbed per unit volume by thermal expansion/contraction and viscous dissipation, is given by [
1,
7]:
Results are reported in
Figure 6 where it is observable how the COP
n exhibits a maximum in correspondence of the best HXs configuration previously deduced reaching the value 0.22. This result supports the conclusion that entropy generation minimization can be considered as a viable design strategy of HXs in thermoacoustic applications.
Figure 6.
The normalized coefficient of performance COPn evaluated in the combinations of LC, LH, y0 producing, a minimum in entropy generation for an output cooling power of 230 W. Continuous line is a guide for the eye.
Figure 6.
The normalized coefficient of performance COPn evaluated in the combinations of LC, LH, y0 producing, a minimum in entropy generation for an output cooling power of 230 W. Continuous line is a guide for the eye.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





