
Improved LMD, Permutation Entropy and Optimized K-Means to Fault Diagnosis for Roller Bearings

Abstract
:1. Introduction
2. The Improved Method of LMD Edge Effects
2.1. Review of LMD Method
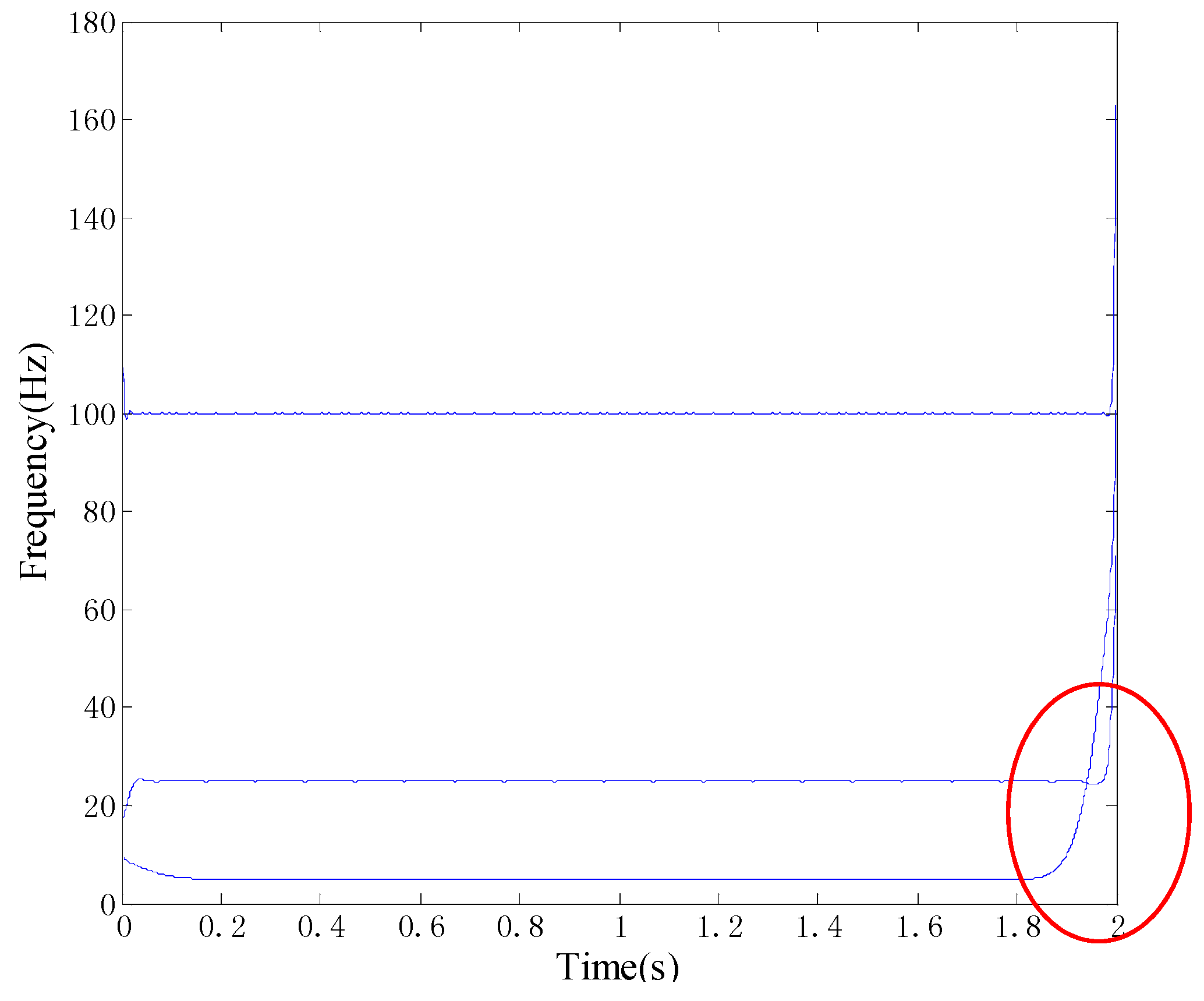
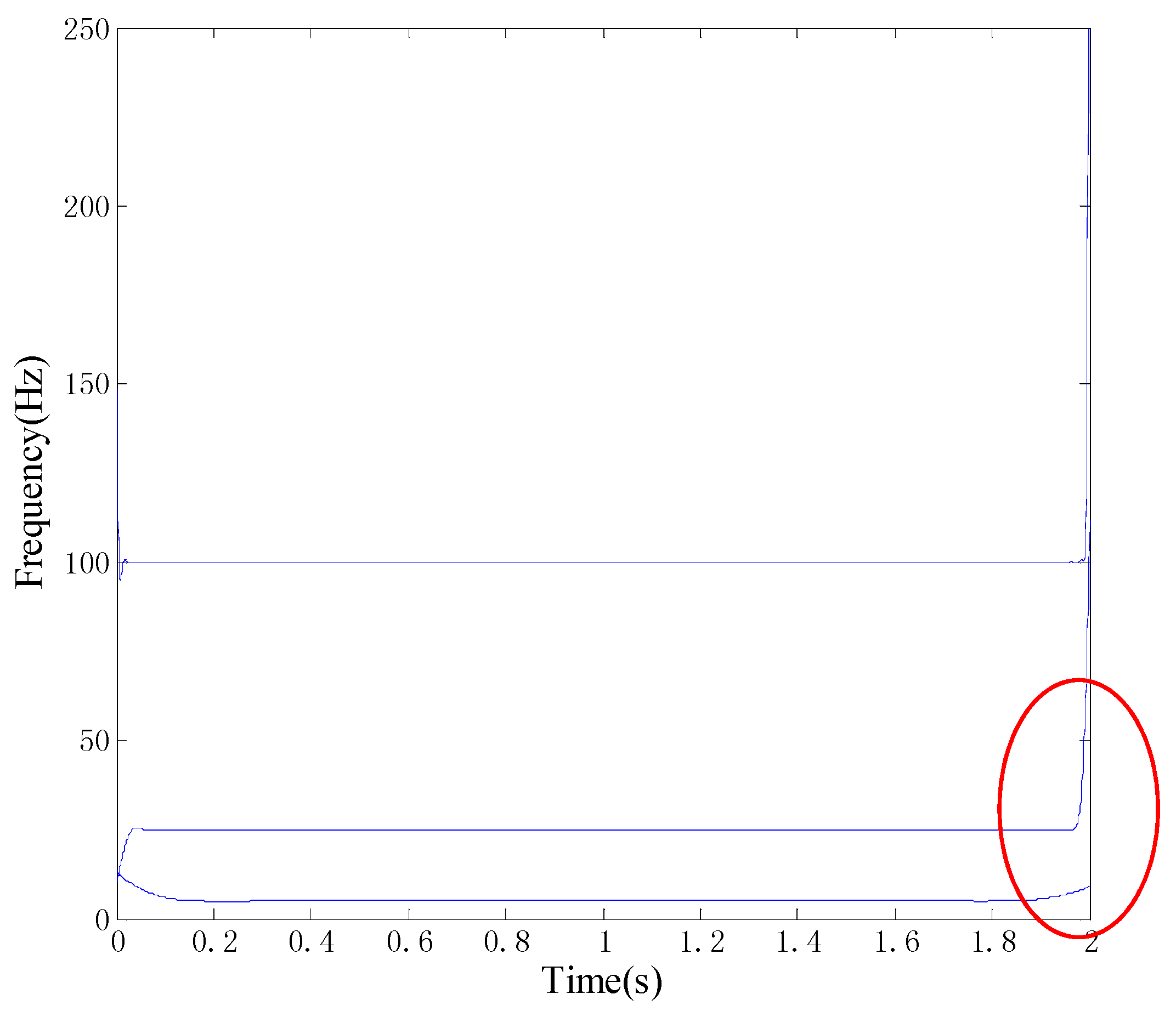
2.2.The Boundary Processing Method
- Build a characteristic waveform which is a triangular waveform based on three points.
- Calculate the all start points and search the integration interval matching best the characteristic waveform. It’s a process of self-similarity and the corresponding time is achieved in Equation (3).
- Find out the best extension of signal through the shape error parameter without considering the order of magnitudes.
- Extend the right end by the same way. Meanwhile, the extended signal will be achieved.
3. Permutation Entropy
4. K-means Clustering Algorithm
- Random initialization of cluster centroids for a given data set.
- Calculate the distance between the cluster centroids and every point. Distribute these points to the cluster represented by the centroids according to the shortest distance principle.
- Find out the mean value of every cluster and it could be seen as a new cluster centroid.
- Compare the new centroid with the previous or check the cluster objective function’s convergence property. Repeat steps (2) and (3) until the cluster centroid remains unchanged or the function is convergence.
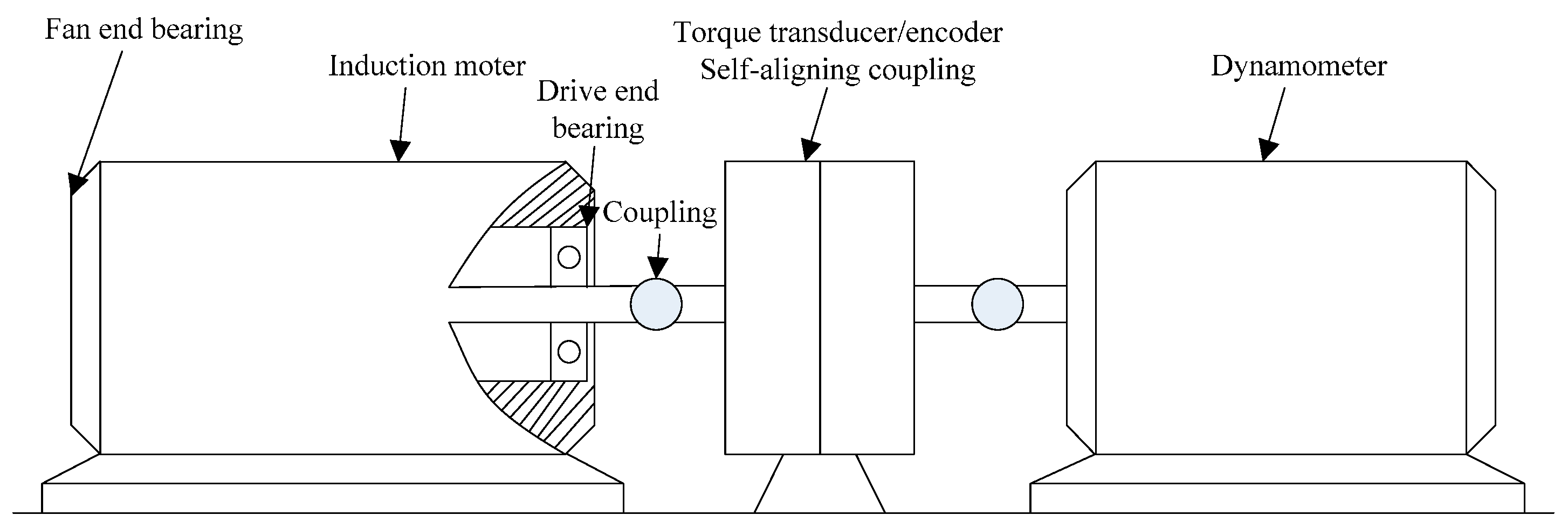
5. Application to Roller Bearing Fault Diagnosis
5.1. The Fault Feature Extraction Combining Improved LMD and PE
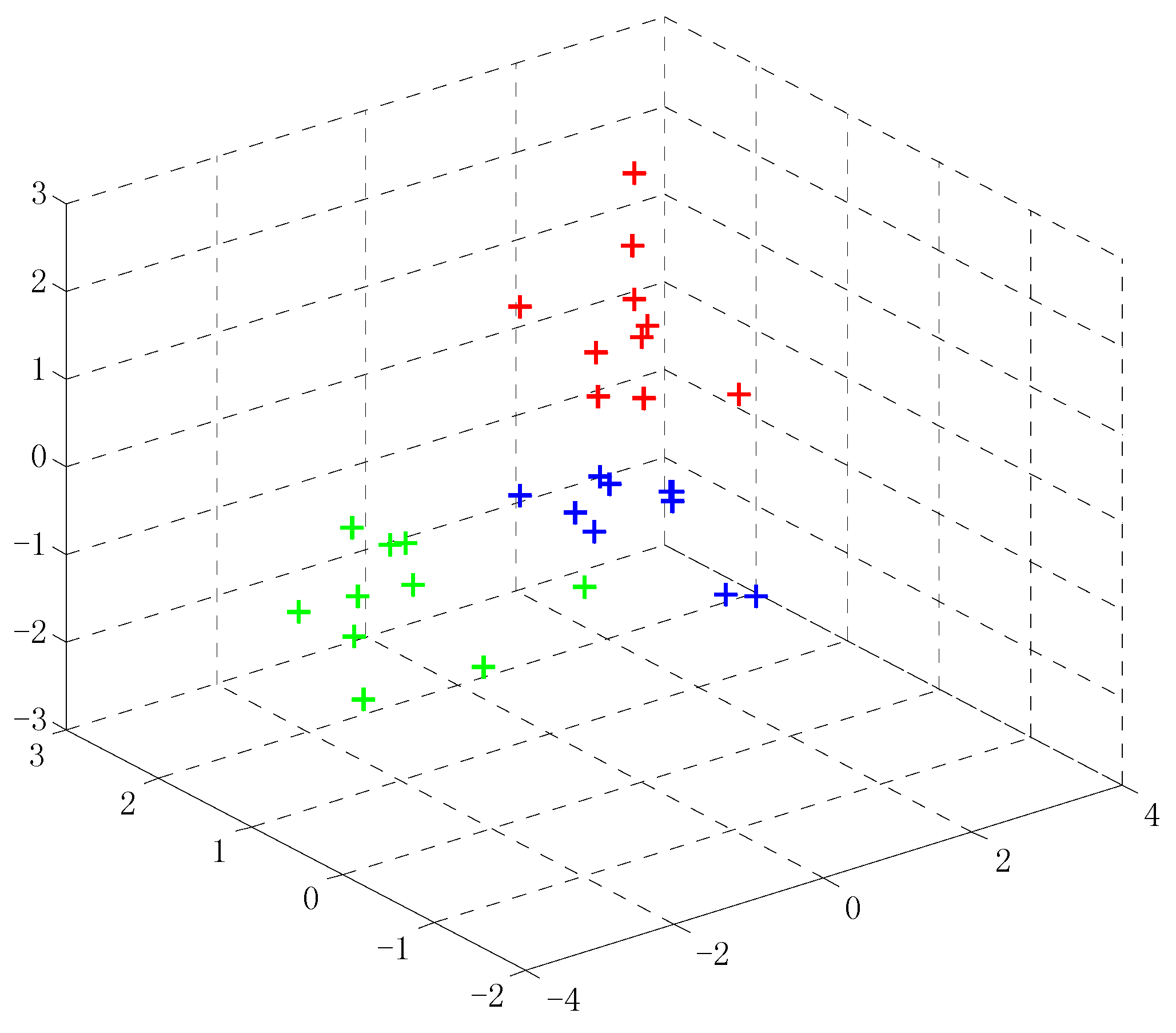
5.2. The Fault Pattern Recognition Based on the Optimized K-means Clustering Algorithm
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- William, P.E.; Hoffman, M.W. Identification of bearing faults using time domain zero-crossings. Mech. Syst. Signal Process. 2011, 25, 3078–3088. [Google Scholar] [CrossRef]
- Li, X.; Zheng, A.; Li, C.; Zhang, L. Rolling element bearing fault detection using support vector machine with improved ant colony optimization. Measurement 2013, 46, 2726–2734. [Google Scholar] [CrossRef]
- Liu, H.; Han, M. A fault diagnosis method based on local mean decomposition and multi-scale entropy for roller bearings. Mech. Mach. Theory 2014, 75, 67–78. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yang, Y. A rolling bearing fault diagnosis method based on multi-scale fuzzy entropy and variable predictive model-based class discrimination. Mech. Mach. Theory 2014, 78, 187–200. [Google Scholar] [CrossRef]
- Feng, Z.; Zuo, M. Vibration signal models for fault diagnosis of planetary gearboxes. J. Sound Vib. 2012, 331, 4919–4939. [Google Scholar] [CrossRef]
- Han, M.; Pan, J. A fault diagnosis method combined with LMD, sample entropy and energy ratio for roller bearings. Measurement 2015, 76, 7–19. [Google Scholar] [CrossRef]
- Cohen, L. Time-frequency distribution—A review. Proc. IEEE 1989, 7, 941–981. [Google Scholar] [CrossRef]
- Lee, J.-H.; Kim, J.; Kim, H.-J. Development of enhanced Wigner–Ville distribution function. Mech. Syst. Signal Process. 2001, 2, 367–398. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.; Chen, X. Wavelets for fault diagnosis of rotary machines: A review with applications. Signal Process. 2014, 96, 1–15. [Google Scholar] [CrossRef]
- Lin, J.; Qu, L. Feature extraction based on Morlet wavelet and its application for mechanical fault diagnosis. J. Sound Vib. 2000, 1, 135–148. [Google Scholar] [CrossRef]
- Olhede, S.; Walden, A.T. The Hilbert spectrum via wavelet projections. Proc. R. Soc. Lond. 2004, 460, 955–975. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Xu, M.; Wei, Y.; Huang, W.H. An improvement EMD method based on the optimized rational Hermite interpolation approach and its application to gear fault diagnosis. Measurement 2015, 63, 330–345. [Google Scholar] [CrossRef]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 5, 443–454. [Google Scholar] [CrossRef] [PubMed]
- Xue, X.; Zhou, J.; Zhang, Y.; Jian, X.; Wang, X. An extrema extension method based on support vector regression for restraining the end effects in empirical model decomposition. Appl. Mech. Mater. 2013, 404, 526–532. [Google Scholar] [CrossRef]
- Ren, D.; Yang, S.; Wu, Z. Research on end effect of LMD based time-frequency analysis in rotating machinery fault diagnosis. China Mech. Eng. 2012, 8, 951–956. [Google Scholar]
- Cai, Y.; Li, A.; Zhang, W.; Xu, P. HHT end effect processing method based on maximum Lyapunov index boundary extension model. Chin. J. Sci. Instr. 2011, 32, 1330–1336. [Google Scholar]
- Liu, W.Y.; Gao, Q.W.; Ye, G. A novel wind turbine bearing fault diagnosis method based on Integral Extension LMD. Measurement 2015, 74, 70–77. [Google Scholar] [CrossRef]
- Wu, S.; Wu, P.; Wu, C.; Ding, J.; Wang, C. Bearing fault diagnosis based on multiscale permutation entropy and support vector machine. Entropy 2012, 14, 1343–1356. [Google Scholar] [CrossRef]
- Zanin, M.; Zunino, L. Permutation entropy and its main biomedical and econophysics applications: A review. Entropy 2012, 14, 1553–1577. [Google Scholar] [CrossRef]
- Huang, G.-B.; Zhou, H.; Ding, X.; Zhang, R. Extreme learningmachine for regression andmulticlass classification. IEEE Trans. Syst.Man Cybern. Part B Cybern. 2012, 2, 513–529. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.-B.; Ding, X.; Zhou, H. Optimization method based extreme learning machine for classification. Neurocomputing 2010, 1, 155–163. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, W.; Han, J.; Wang, G. A new wind turbine fault diagnosis method based on the local mean decomposition. Renew. Energy 2012, 48, 411–415. [Google Scholar] [CrossRef]
- Li, M. Fractal time series—A tutorial review. Math. Probl. Eng. 2010. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Y.; Zhu, Y. Intelligent fault diagnosis of rolling element bearing based on SVMs and fractal dimension. Mech. Syst. Signal Process. 2007, 5, 2012–2024. [Google Scholar] [CrossRef]
- Maragos, P.; Sun, F.K. Measuring the fractal dimension of signals: Morphological covers and iterative optimization. IEEE Trans. Signal Process. 1993, 1, 108–121. [Google Scholar] [CrossRef]
- Zheng, Z.; Jiang, W. Gear fault diagnosis method based on local mean decomposition and generalized morphological fractal dimensions. Mech. Mach. Theory 2015, 91, 151–167. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation entropy: A natural complexity measure for time series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef] [PubMed]
- Karimov, J.; Ozbayoglu, M. Clustering quality improvement of k-means using a hybrid evolutionary model. Proced. Comput. Sci. 2015, 61, 38–45. [Google Scholar] [CrossRef]
- Probability Density Function. Available online: https://en.wikipedia.org/wiki/Probability_density_function (accessed on 15 February 2016).
- Bearing Data Center, Case Western Reserve University. Available online: http://csegroups.case.edu/bearingdatacenter/pages/download-data-file (accessed on 15 February 2016).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Test Samples | Classification Accuracy | Iterations | ||
|---|---|---|---|---|---|
| K-Means | Optimized K-Means | K-Means | Optimized K-Means | ||
| 1 | 10 | 92% | 100% | 5 | 5 |
| 2 | 10 | ||||
| 3 | 10 | ||||
| Sequence | State | Operation Condition | PEs | Target Output | Actual Output | ||
|---|---|---|---|---|---|---|---|
| 1 | Normal | 1797 r/min 0HP | 3.861 | 2.144 | 1.325 | 1 | 1 |
| 2 | 1772 r/min 1HP | 4.406 | 2.644 | 1.445 | 1 | 1 | |
| 3 | 1750 r/min 2HP | 4.237 | 2.811 | 1.540 | 1 | 1 | |
| 4 | 1730 r/min 3HP | 4.117 | 2.750 | 1.462 | 1 | 1 | |
| 5 | Inner race fault | 1797 r/min 0HP | 5.465 | 3.426 | 2.234 | 2 | 2 |
| 6 | 1772 r/min 1HP | 5.478 | 3.488 | 2.212 | 2 | 2 | |
| 7 | 1750 r/min 2HP | 5.445 | 3.300 | 2.243 | 2 | 2 | |
| 8 | 1730 r/min 3HP | 5.451 | 3.309 | 2.169 | 2 | 2 | |
| 9 | Outer race fault | 1797 r/min 0HP | 5.098 | 3.370 | 2.110 | 3 | 3 |
| 10 | 1772 r/min 1HP | 5.097 | 3.430 | 2.062 | 3 | 3 | |
| 11 | 1750 r/min 2HP | 5.198 | 3.427 | 2.109 | 3 | 3 | |
| 12 | 1730 r/min 3HP | 5.283 | 3.373 | 2.121 | 3 | 3 | |
| 13 | Ball fault | 1797 r/min 0HP | 4.690 | 3.316 | 2.043 | 4 | 4 |
| 14 | 1772 r/min 1HP | 4.718 | 3.364 | 2.017 | 4 | 4 | |
| 15 | 1750 r/min 2HP | 4.725 | 3.374 | 1.995 | 4 | 4 | |
| 16 | 1730 r/min 3HP | 4.697 | 3.308 | 2.169 | 4 | 4 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Z.; Song, W.; Taheri, S. Improved LMD, Permutation Entropy and Optimized K-Means to Fault Diagnosis for Roller Bearings. Entropy 2016, 18, 70. https://0-doi-org.brum.beds.ac.uk/10.3390/e18030070
Shi Z, Song W, Taheri S. Improved LMD, Permutation Entropy and Optimized K-Means to Fault Diagnosis for Roller Bearings. Entropy. 2016; 18(3):70. https://0-doi-org.brum.beds.ac.uk/10.3390/e18030070
Chicago/Turabian StyleShi, Zongli, Wanqing Song, and Saied Taheri. 2016. "Improved LMD, Permutation Entropy and Optimized K-Means to Fault Diagnosis for Roller Bearings" Entropy 18, no. 3: 70. https://0-doi-org.brum.beds.ac.uk/10.3390/e18030070