Latencies in Power Systems: A Database-Based Time-Delay Compensation for Memory Controllers

 ,
,  , and
, and 
Abstract
:1. Introduction
2. Latencies in Wams Communications Infrastructure: Reaching a More Realistic Model
2.1. The General Delayed Communication Infrastructure
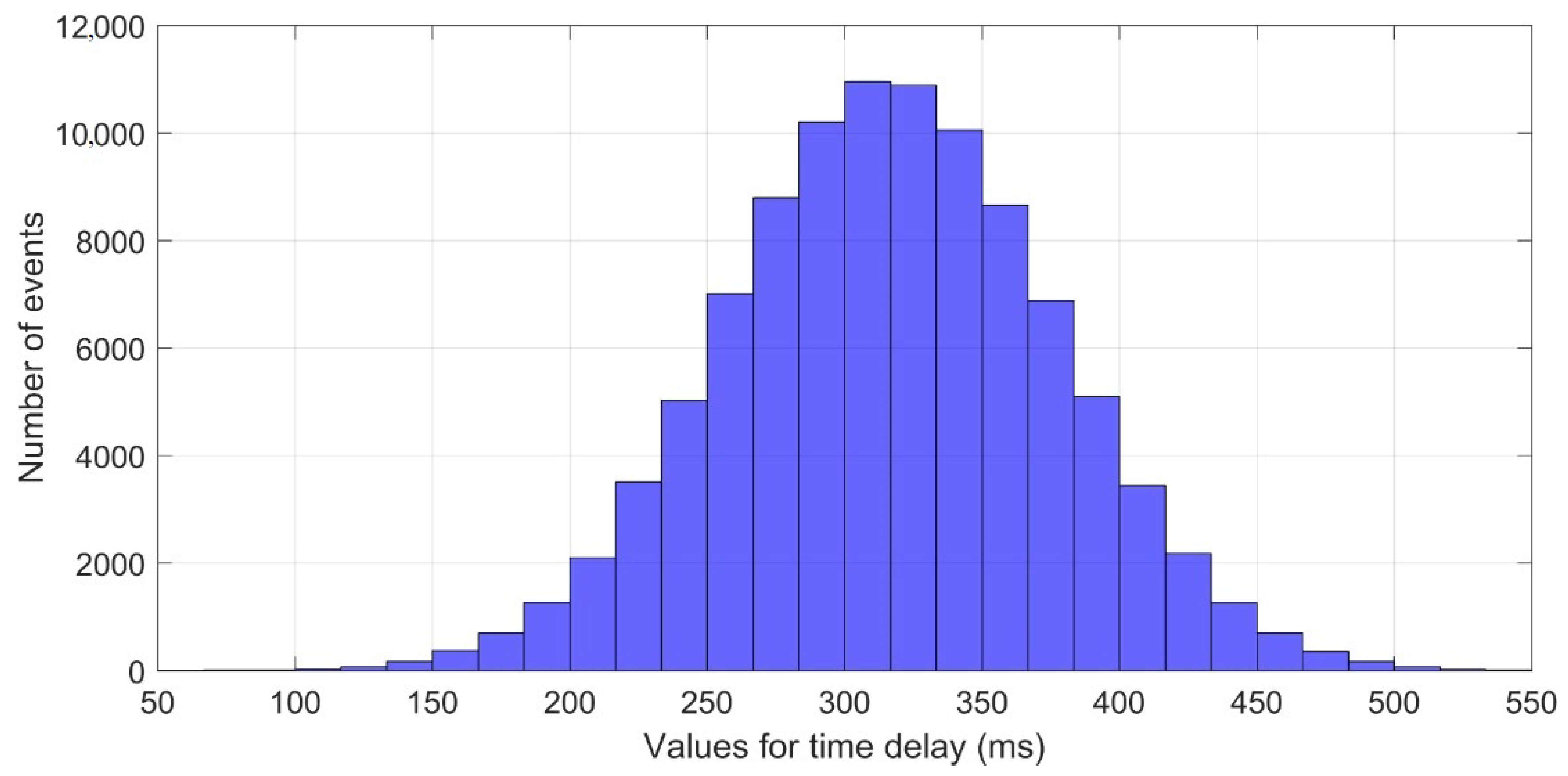
2.2. Behavior and Modeling of the Random Time Delays in the Pmu Communication Infrastructure
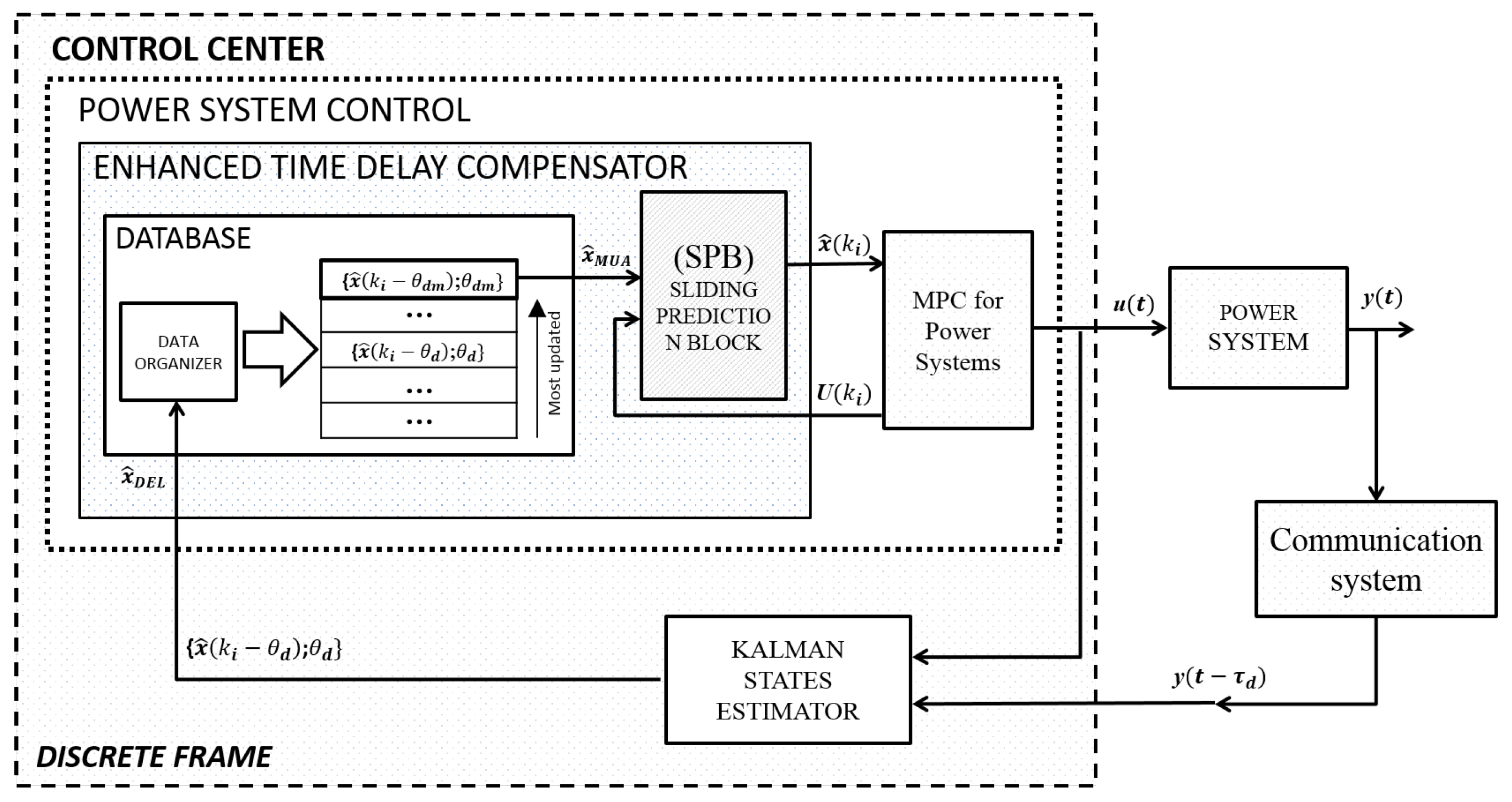
3. The Enhanced Time-Delay Compensator for Time-Delayed Power Systems Control: Modeling the Problem to Propose a Solution
3.1. Time-Delayed Power Systems Modeling
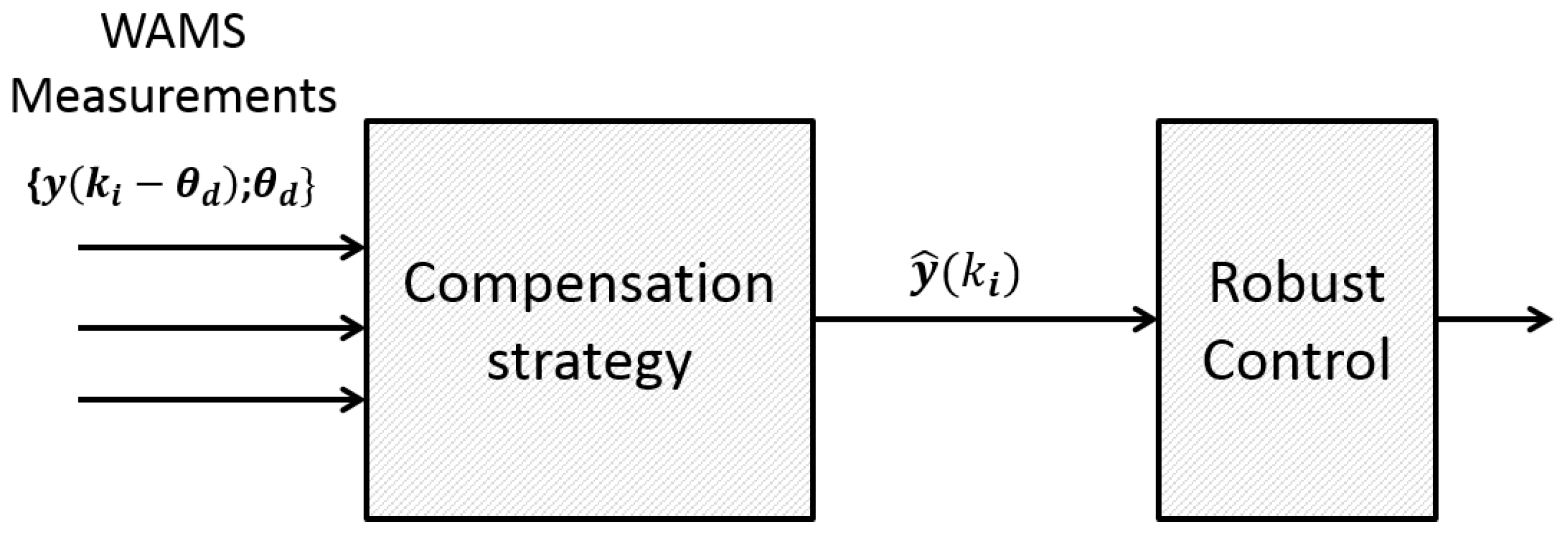
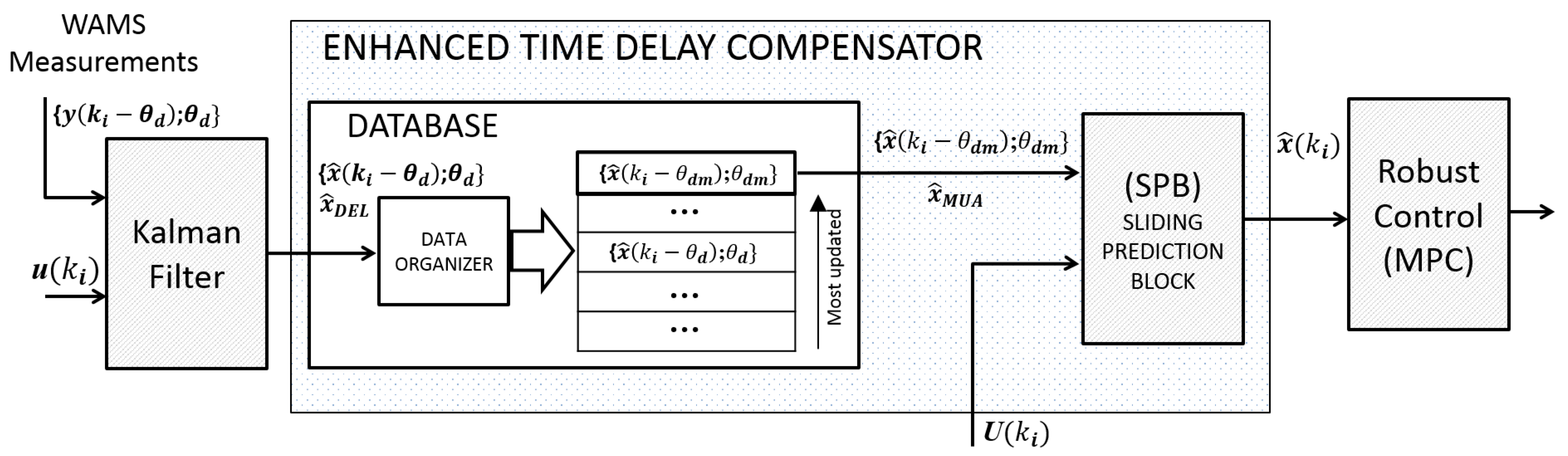
3.2. The Enhanced Time-Delay Compensator
| Algorithm 1: Enhanced Time-delay Compensator. |
 |
4. Application Test
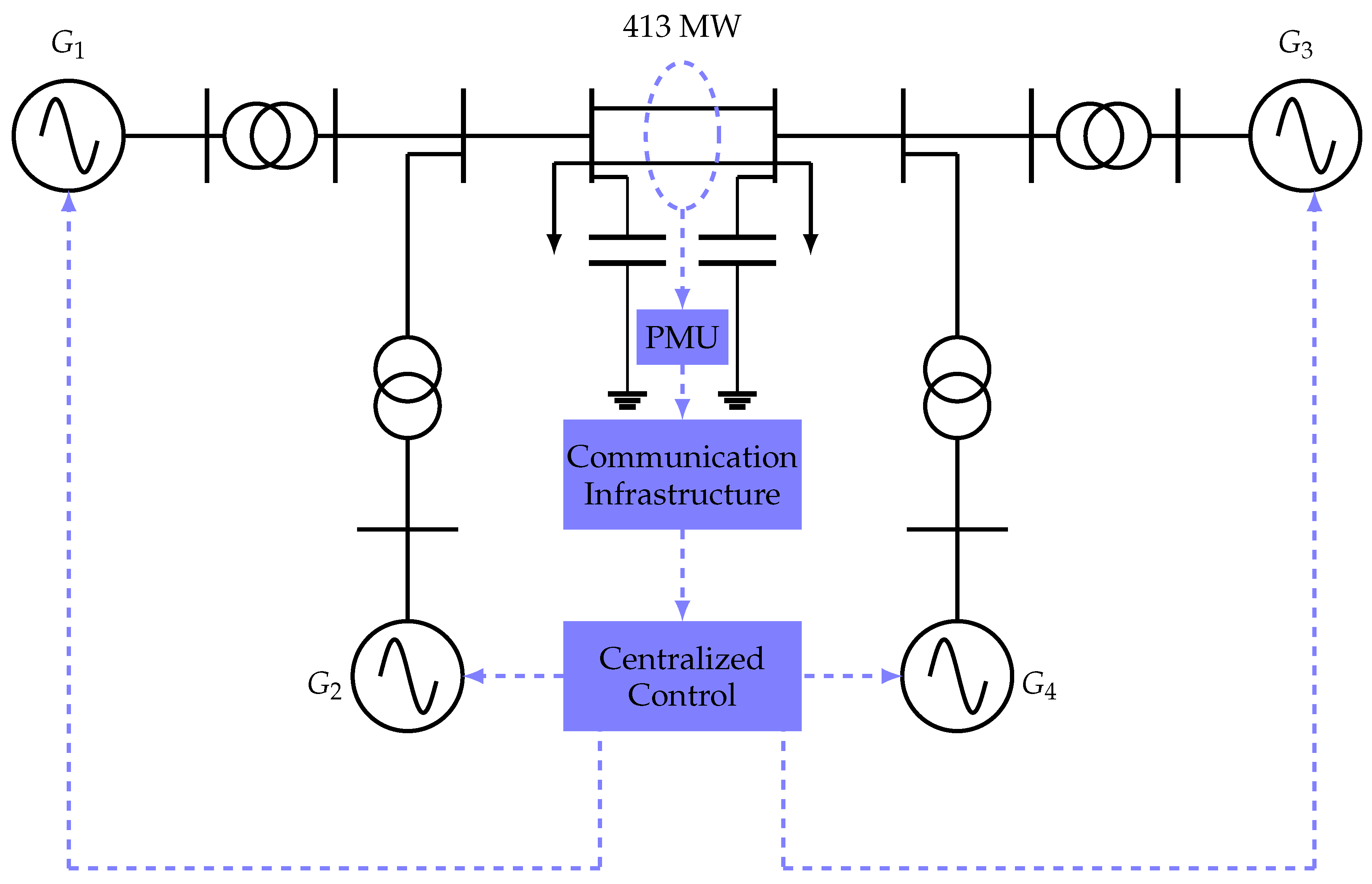
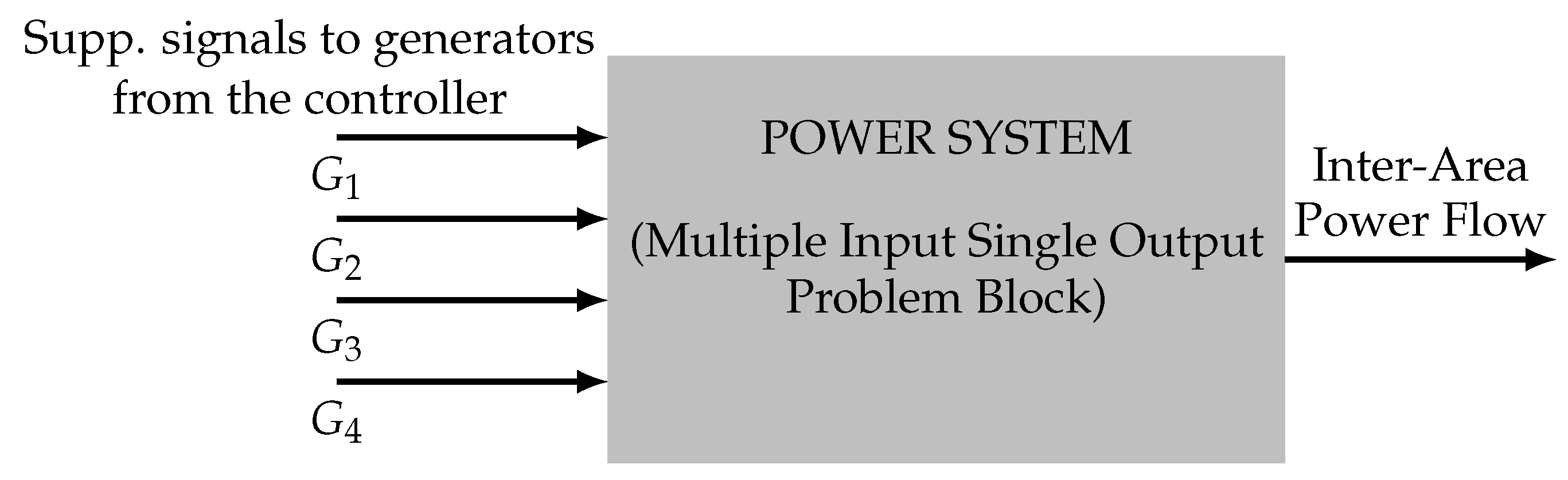
4.1. Test System and Scenarios
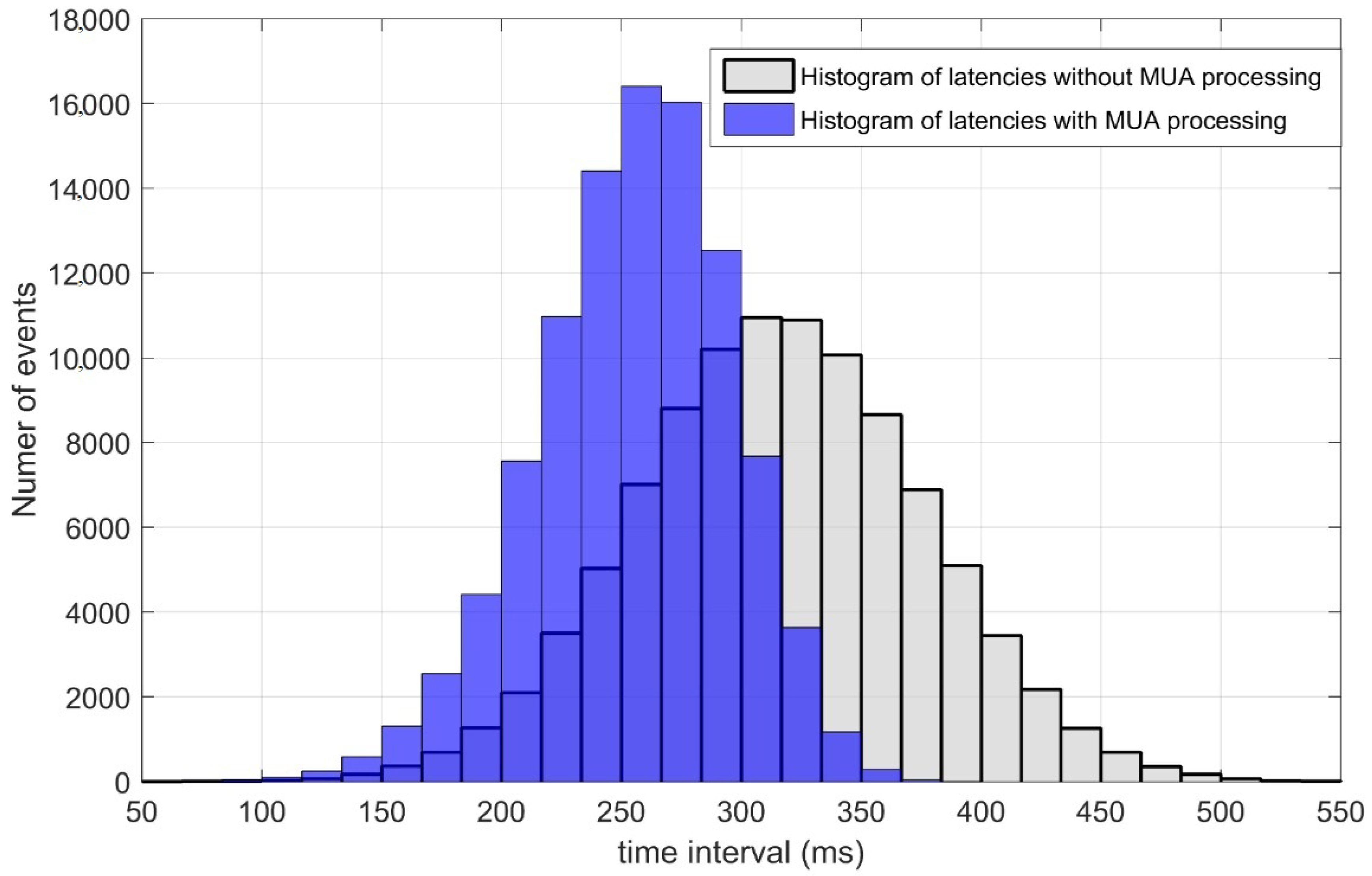
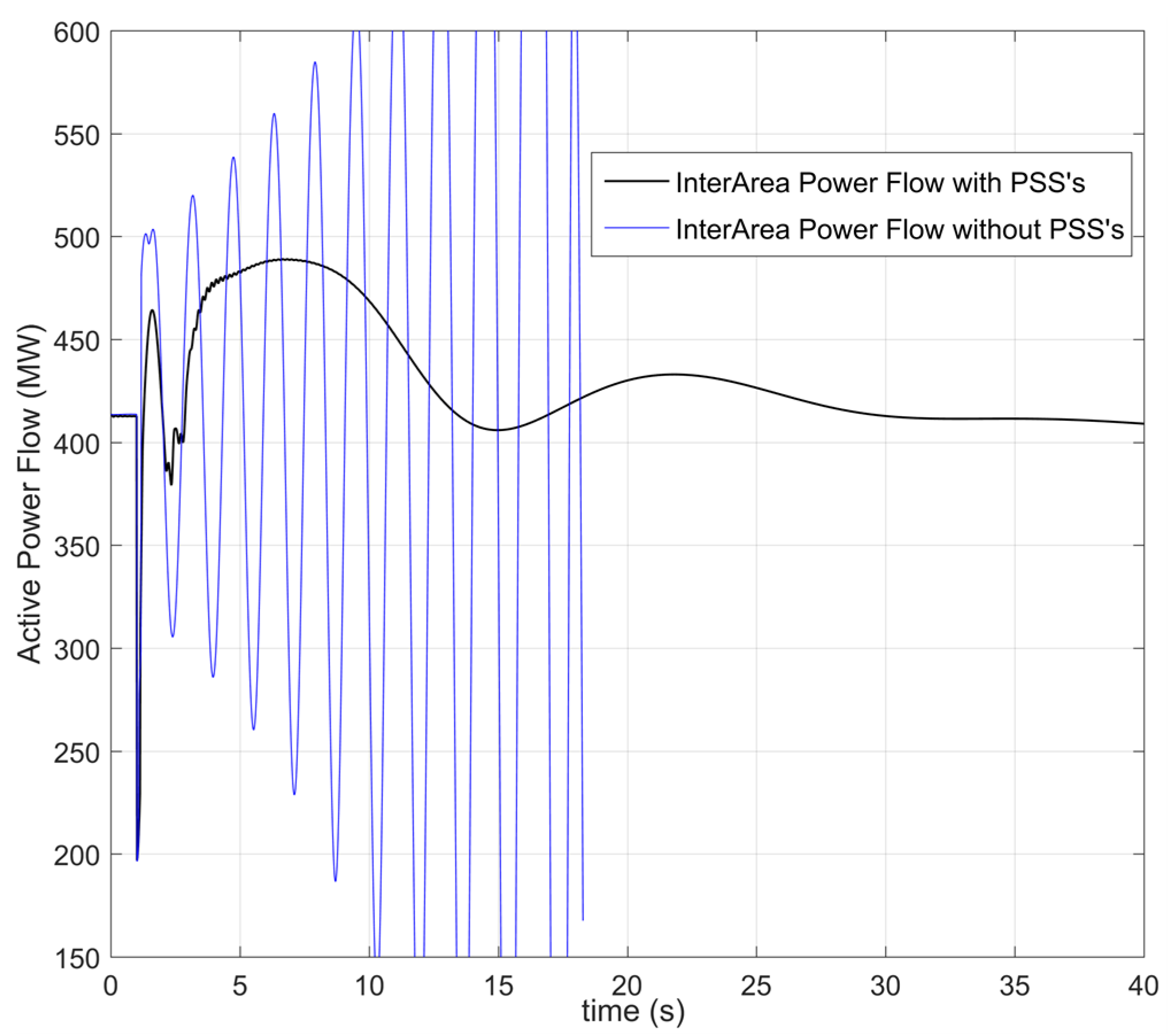
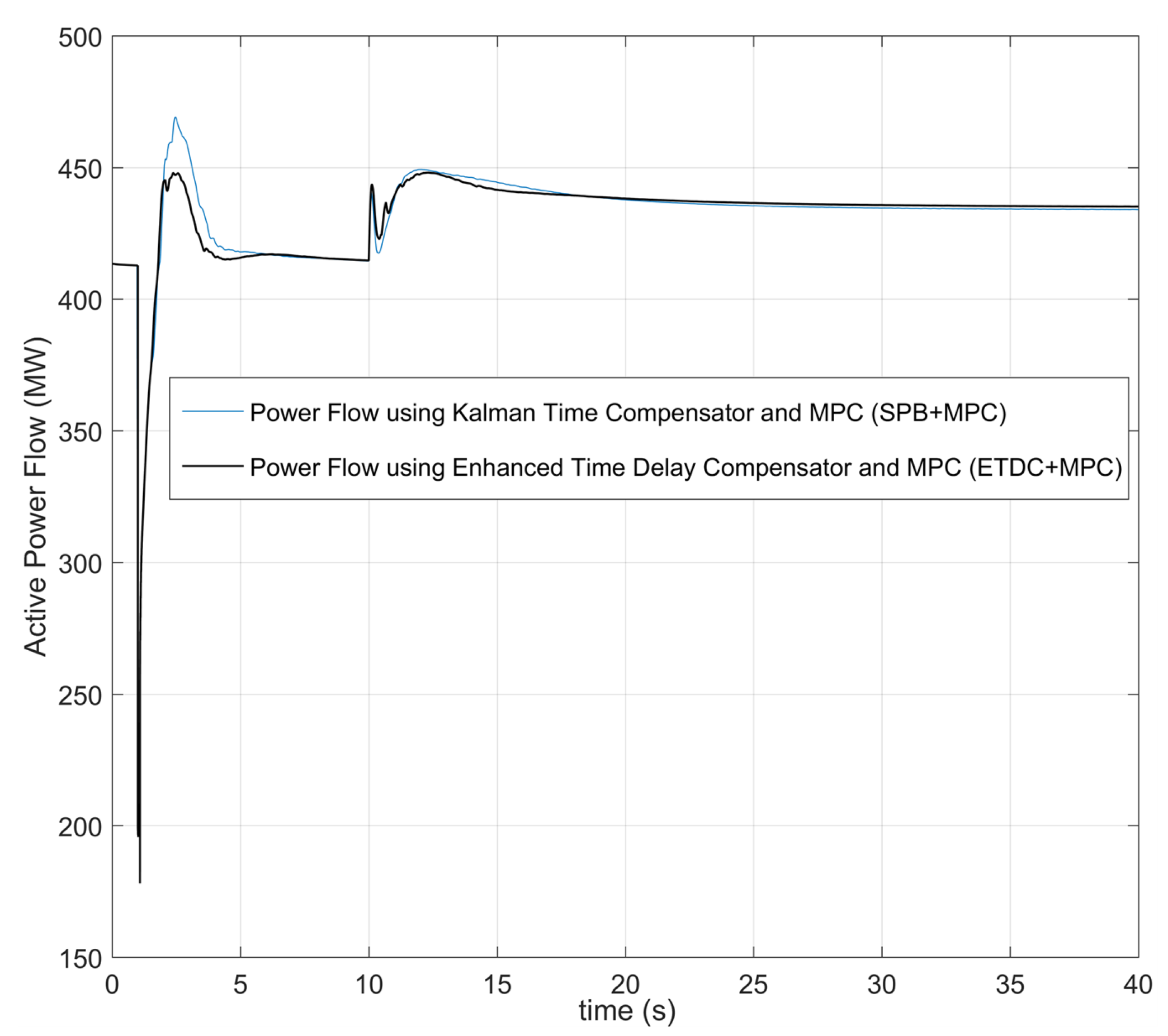
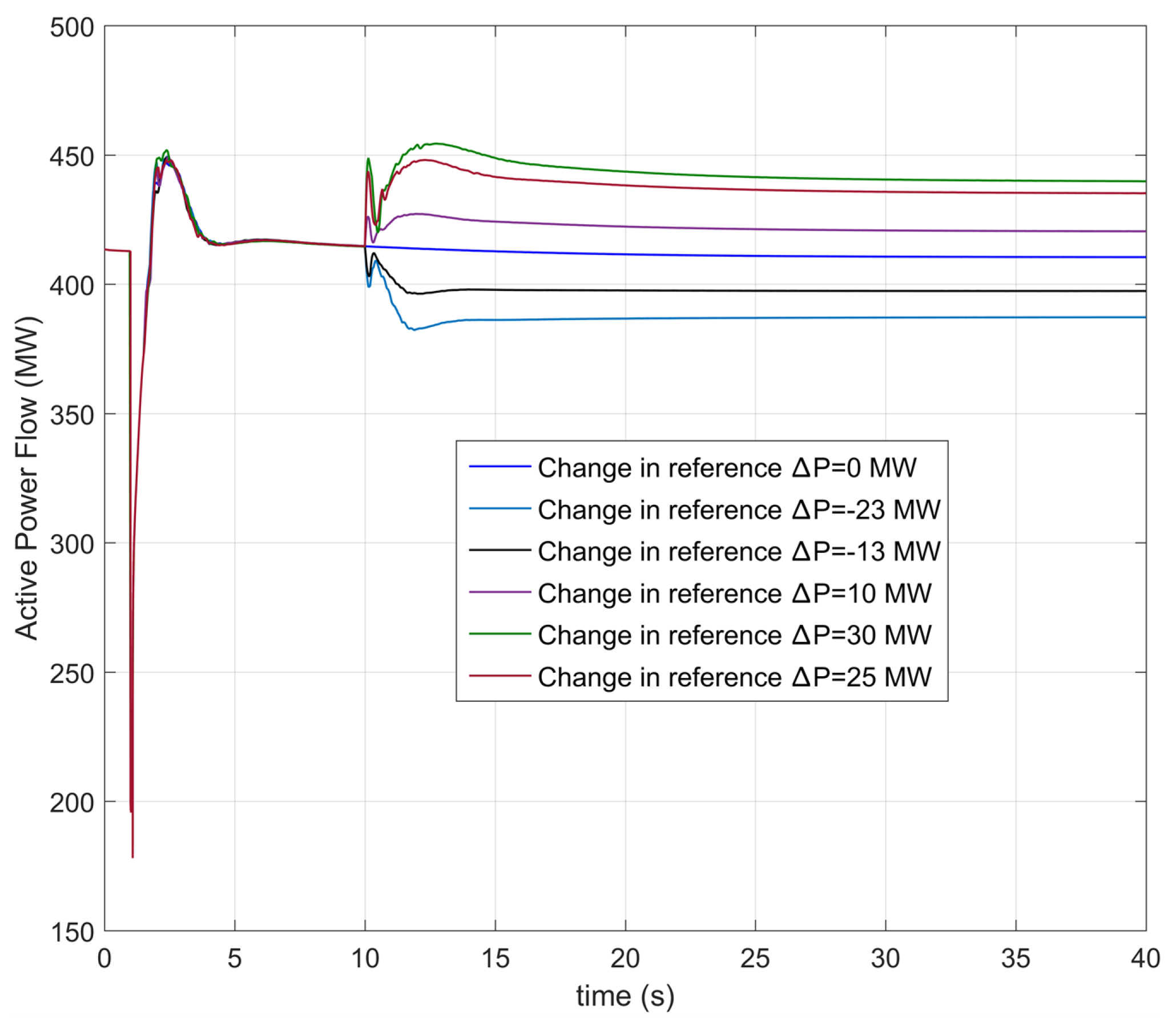
4.2. Performance Comparison between Spb + Mpc and Etdc + Mpc
5. Conclusions and Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Acronyms and variables | |
| MPC | Model Predictive Control |
| PDC | Phasor Data Concentrator |
| SPDC | Super Phasor Data Concentrator |
| SPB | Sliding Prediction Block |
| PMU | Phasor Measurement Unit |
| ETDC | Enhanced Time Delay Compensator |
| Time delay | |
| Control signal | |
| states of the power system | |
| delayed states | |
| delayed estimated states | |
| WAMS | Wide Area Monitoring System |
| WAMC | Wide Area Monitoring and Control |
| WAMPaC | Wide Area Monitoring Protection and Control |
| PSS | Power System Stabilizer |
References
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Machowski, J.; Lubosny, Z.; Bialek, J.W.; BumbyJan, J.R. Power System Dynamics: Stability and Control; Wiley: Hoboken, NJ, USA, 2020. [Google Scholar]
- Mittelstadt, W.A.; Krause, P.E.; Wilson, R.E.; Overholt, P.N.; Sobajic, D.J.; Hauer, J.F.; Rizy, D.T. The DOE Wide Area Measurement System (WAMS) Project: Demonstration of dynamic information technology for the future power system. In Proceedings of the Joint Conference on Fault and Disturbance Analysis: Precise Measurement in Power Systems, Washington DC, USA, 9–11 April 1996. [Google Scholar]
- Ivanescu, D.; Hadjsaid, N.; Snyder, A.; Dion, J.M.; Dugard, L. Robust Stabilizing Control for an Interconnected Power System: Time Delay Approach. In Proceedings of the Fourteenth International Symposium of Mathematical Theory of Networks and Systems, Perpignan, France, 19–23 June 2000. [Google Scholar]
- Ivanescu, D.; Snyder, A.F.; Dion, J.M.; Dugard, L.; Georges, D.; Hadjsaid, N. Control of an Interconnected Power System: A Time Delay Approach. IFAC Proc. Vol. 2001, 34, 449–454. [Google Scholar] [CrossRef]
- Younis, M.R.; Iravani, R. Wide-area damping control for inter-area oscillations: A comprehensive review. In Proceedings of the 2013 IEEE Electrical Power & Energy Conference, Halifax, NS, Canada, 21–23 August 2013. [Google Scholar] [CrossRef]
- Aboul-Ela, M.; Sallam, A.; McCalley, J.; Fouad, A. Damping controller design for power system oscillations using global signals. IEEE Trans. Power Syst. 1996, 11, 767–773. [Google Scholar] [CrossRef]
- Zhu, K.; Chenine, M.; Nordström, L.; Holmström, S.; Ericsson, G. An Empirical Study of Synchrophasor Communication Delay in a Utility TCP/IP Network. Int. J. Emerging Electr. Power Syst. 2013, 14, 341–350. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Yang, D.; Liu, F.; Cao, Y.; Rehtanz, C. Interconnected Power Systems; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, Y.; Liu, F.; Cao, Y.; Rehtanz, C. Design and Implementation of Delay-Dependent Wide-Area Damping Control for Stability Enhancement of Power Systems. IEEE Trans. Smart Grid 2017, 8, 1831–1842. [Google Scholar] [CrossRef]
- Got Latency? Available online: https://selinc.com/solutions/synchrophasors/report/115256/ (accessed on 1 November 2012).
- Molina-Cabrera, A. Inter-area Oscillations in Time Delayed Power Systems: A Kalman Time Compensator and a Model Predictive Control Approach. Ph.D. Thesis, Universidad de los Andes, Bogotá D.C, Colombia, May 2018. [Google Scholar]
- Milano, F.; Anghel, M. Impact of Time Delays on Power System Stability. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 889–900. [Google Scholar] [CrossRef]
- Taleb, M.; Zribi, M.; Rayan, M. On the Control of Time Delay Power Systems. Int. J. Innov. Inf. Control. 2013, 9, 769–792. [Google Scholar]
- Bokharaie, V.; Sipahi, R.; Milano, F. Small-signal stability analysis of delayed power system stabilizers. In Proceedings of the 2014 Power Systems Computation Conference, Wroclaw, Poland, 18–22 August 2014. [Google Scholar] [CrossRef]
- Snyder, A.; Ivanescu, D.; HadjSaid, N.; Georges, D.; Margotin, T. Delayed-input wide-area stability control with synchronized phasor measurements and linear matrix inequalities. In Proceedings of the 2000 Power Engineering Society Summer Meeting (Cat. No.00CH37134), Seattle, WA, USA, 16–20 July 2000. [Google Scholar] [CrossRef]
- Wu, H.; Tsakalis, K.; Heydt, G. Evaluation of Time Delay Effects to Wide-Area Power System Stabilizer Design. IEEE Trans. Power Syst. 2004, 19, 1935–1941. [Google Scholar] [CrossRef]
- Normey-Rico, J.E.; Camacho, E.F. Dead-time compensators: A survey. Control Eng. Pract. 2008, 16, 407–428. [Google Scholar] [CrossRef]
- Majumder, R.; Chaudhuri, B.; Pal, B.; Zhong, Q.C. A unified Smith predictor approach for power system damping control design using remote signals. IEEE Trans. Control Syst. Technol. 2005, 13, 1063–1068. [Google Scholar] [CrossRef] [Green Version]
- Molina-Cabrera, A.; Gomez, O.; Rios, M.A. Smith predictor based backstepping control for damping power system oscillations. In Proceedings of the 2014 IEEE PES Transmission & Distribution Conference and Exposition—Latin America (PES T&D-LA), Medellin, Colombia, 10–13 September 2014. [Google Scholar] [CrossRef]
- Chaudhuri, N.R.; Ray, S.; Majumder, R.; Chaudhuri, B. A New Approach to Continuous Latency Compensation With Adaptive Phasor Power Oscillation Damping Controller (POD). IEEE Trans. Power Syst. 2010, 25, 939–946. [Google Scholar] [CrossRef]
- Mokhtari, M.; Aminifar, F.; Nazarpour, D.; Golshannavaz, S. Wide-area power oscillation damping with a fuzzy controller compensating the continuous communication delays. IEEE Trans. Power Syst. 2013, 28, 1997–2005. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wen, J.Y.; Cheng, S.J.; Wu, Q.H. Networked predictive control based wide-area supplementary damping controller of SVC with communication delays compensation. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013. [Google Scholar] [CrossRef]
- Esquivel, P.; Romero, G.; Ornelas-Tellez, F.; Reyes, E.; Castañeda, C.E.; Morfin, O. Statistical inference of multivariable modal stability margins of time-delay perturbed power systems. Electr. Power Syst. Res. 2020, 181, 106186. [Google Scholar] [CrossRef]
- Nie, Y.; Zhang, P.; Cai, G.; Zhao, Y.; Xu, M. Unified Smith predictor compensation and optimal damping control for time-delay power system. Int. J. Electr. Power Energy Syst. 2020, 117, 1–11. [Google Scholar] [CrossRef]
- Nie, Y.; Zhang, P.; Cai, G.; Zhao, Y.; Xu, M. Fixed Low-Order Wide-Area Damping Controller Considering Time Delays and Power System Operation Uncertainties. IEEE Trans. Power Syst. 2020, 35, 3918–3926. [Google Scholar] [CrossRef]
- Nan, J.; Yao, W.; Wen, J.; Peng, Y.; Fang, J.; Ai, X.; Wen, J. Wide-area power oscillation damper for DFIG-based wind farm with communication delay and packet dropout compensation. Int. J. Electr. Power Energy Syst. 2021, 124, 1–11. [Google Scholar] [CrossRef]
- Ye, H.; Liu, Y. Design of model predictive controllers for adaptive damping of inter-area oscillations. Int. J. Electr. Power Energy Syst. 2013, 45, 509–518. [Google Scholar] [CrossRef]
- Shiroei, M.; Ranjbar, A. Supervisory predictive control of power system load frequency control. Int. J. Electr. Power Energy Syst. 2014, 61, 70–80. [Google Scholar] [CrossRef]
- Ma, M.; Chen, H.; Liu, X.; Allgöwer, F. Distributed model predictive load frequency control of multi-area interconnected power system. Int. J. Electr. Power Energy Syst. 2014, 62, 289–298. [Google Scholar] [CrossRef]
- Li, Y.; Rehtanz, C.; Yang, D.; Rüberg, S.; Häger, U. Robust high-voltage direct current stabilising control using wide-area measurement and taking transmission time delay into consideration. IET Gener. Transm. Distrib. 2011, 5, 289–297. [Google Scholar] [CrossRef]
- Molina-Cabrera, A.; Rios, M.A.; Velasquez, M.A. Model Predictive Control for non-linear delayed power systems. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015. [Google Scholar] [CrossRef]
- Molina-Cabrera, A.; Rios, M.A. A Kalman Latency Compensation Strategy for Model Predictive Control to Damp Inter-Area Oscillations in Delayed Power Systems. Int. Rev. Electr. Eng. 2016, 11, 296. [Google Scholar] [CrossRef]
- Molina-Cabrera, A.; Rios, M.A.; Besanger, Y.; HadjSaid, N. A latencies tolerant model predictive control approach to damp Inter-area oscillations in delayed power systems. Int. J. Electr. Power Energy Syst. 2018, 98, 199–208. [Google Scholar] [CrossRef]
- Johnson, A.; Wen, J.; Wang, J.; Liu, E.; Hu, Y. Integrated system architecture and technology roadmap toward WAMPAC. In Proceedings of the ISGT 2011, Anaheim, CA, USA, 17–19 January 2011. [Google Scholar] [CrossRef]
- Ashton, P.M.; Taylor, G.A.; Irving, M.R.; Carter, A.M.; Bradley, M.E. Prospective Wide Area Monitoring of the Great Britain Transmission System using Phasor Measurement Units. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012. [Google Scholar] [CrossRef]
- Hossain, E.; Han, Z.; Vincent, H. Smart Grid Communications and Networking; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar] [CrossRef]
- IEEE Standard for Synchrophasor Measurements for Power Systems. Available online: https://0-ieeexplore-ieee-org.brum.beds.ac.uk/document/6111219 (accessed on 28 December 2011).
- Liu, W.; Luo, H.; Li, S.; Gao, D. Investigation and Modeling of Communication Delays in Wide Area Measurement System. In Proceedings of the 2012 Asia-Pacific Power and Energy Engineering Conference, Shanghai, China, 27–29 March 2012. [Google Scholar] [CrossRef]
- Mohagheghi, S.; Venayagamoorthy, G.K.; Harley, R.G. Optimal Wide Area Controller and State Predictor for a Power System. IEEE Trans. Power Syst. 2007, 22, 693–705. [Google Scholar] [CrossRef]
- Albertos, P.; Garcia, P.; Sanz, R. Some contributions to the design of dead-time compensators. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016. [Google Scholar] [CrossRef]
- Naduvathuparambil, B.; Valenti, M.; Feliachi, A. Communication delays in wide area measurement systems. In Proceedings of the Thirty-Fourth Southeastern Symposium on System Theory (Cat. No.02EX540), Huntsville, AL, USA, 19 March 2002. [Google Scholar] [CrossRef] [Green Version]
- García, P.; Albertos, P. Dead-time-compensator for unstable MIMO systems with multiple time delays. J. Process Control 2010, 20, 877–884. [Google Scholar] [CrossRef]
- James, B.R.; David, Q.M.; Moritz, M.D. Model Predictive Control Theory And Design; Nob Hill Publishing: London, UK, 2009. [Google Scholar]
- Molina-Cabrera, O.D.; Gil-González, W.; Molina-Cabrera, A. Second-Order Cone Approximation for Voltage Stability Analysis in Direct Current Networks. Symmetry 2020, 12, 1587. [Google Scholar] [CrossRef]
- Gil-Gonzalez, W.; Serra, F.; Dominguez, J.; Campillo, J.; Montoya, O.D. Predictive Power Control for Electric Vehicle Charging Applications. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020. [Google Scholar] [CrossRef]
- Grisales-Noreña, W.; Molina-Cabrera, A.; Montoya, O.D.; Grisales-Noreña, L.F. An MI-SDP model for optimal location and sizing of distributed generators in DC grids that guarantees the optimal global solution. Appl. Sci. 2020, 10, 7681. [Google Scholar] [CrossRef]
- Rawlings, J.B.; Mayne, D.Q.; Diehl, M.M. Model Predictive Control: Theory, Computation, and Design; Nob Hill Publishing: London, UK, 2013. [Google Scholar]
- Boukas, E.K.; Liu, Z.K. Deterministic and Stochastic Time-Delay Systems; Birkhäuser: Boston, MA, USA, 2002. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Communication Link | Associated Delay (ms) |
|---|---|
| Fiber-Optic cables | 100–150 |
| Microwave Links | 100–150 |
| Power line carrier (PLC) | 150–50 |
| Telephone lines | 200–300 |
| Satellite link | 500–700 |
| Transient Condition | Overshoot (%) | Settling Time (s) | ||
|---|---|---|---|---|
| SPB + MPC | EDTC + MPC | SPB + MPC | ETDC + MPC | |
| I | 13.8 | 8.4 | 6.2 | 3.8 |
| II | 2.66 | 2.5 | 17.4 | 15.2 |
| New Reference and (MW) | Associated Error (MW) |
|---|---|
| 390 () | 2.8 |
| 400 () | 2.6 |
| 413 () | 2.5 |
| 423 () | 2.5 |
| 438 () | 3.0 |
| 443 () | 3.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molina-Cabrera, A.; Ríos, M.A.; Besanger, Y.; Hadjsaid, N.; Montoya, O.D. Latencies in Power Systems: A Database-Based Time-Delay Compensation for Memory Controllers. Electronics 2021, 10, 208. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10020208
Molina-Cabrera A, Ríos MA, Besanger Y, Hadjsaid N, Montoya OD. Latencies in Power Systems: A Database-Based Time-Delay Compensation for Memory Controllers. Electronics. 2021; 10(2):208. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10020208
Chicago/Turabian StyleMolina-Cabrera, Alexander, Mario A. Ríos, Yvon Besanger, Nouredine Hadjsaid, and Oscar Danilo Montoya. 2021. "Latencies in Power Systems: A Database-Based Time-Delay Compensation for Memory Controllers" Electronics 10, no. 2: 208. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10020208