
Optimal Scheduling of Movable Electric Vehicle Loads Using Generation of Charging Event Matrices, Queuing Management, and Genetic Algorithm


Abstract
:
1. Introduction
2. Key Contributions
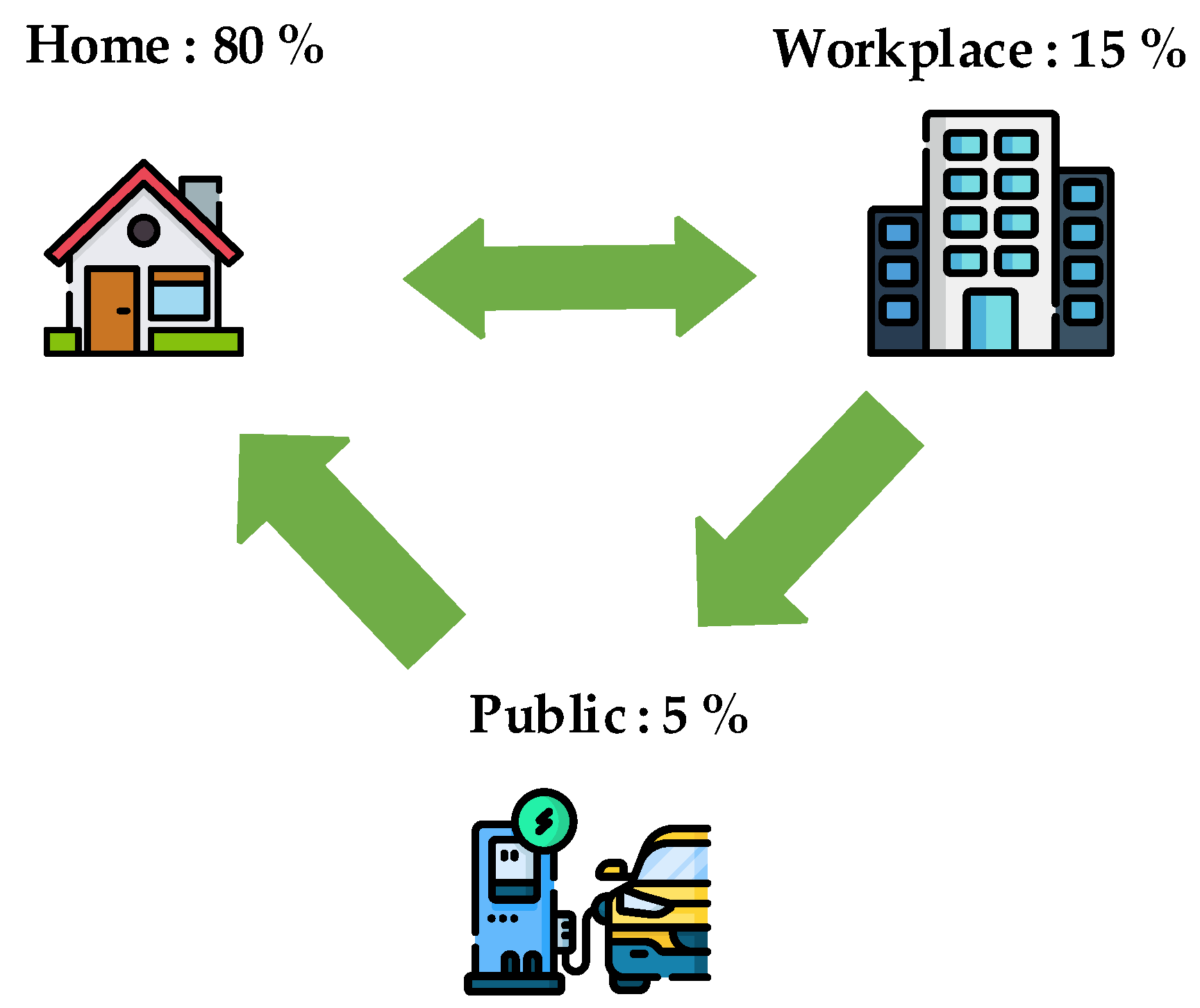
- The nature of EV loads can be movable around the system and time-dependent due to daily human activities; for example, users can charge their EVs at home in the evening, while the next day, they may recharge their EVs again at the workplace. Therefore, the EV loads can be moved around in the power system at different locations and times. These spatial effects were included in the load profile simulation and the optimization models developed in this research.
- A load profile simulation of the growing electricity demand from EVs was developed with two data sets: vehicle registration and a travel survey. The first set of data was used to formulate a density function of battery sizes of EVs on the market and obtained from the registration database of the Department of Land Transport (DLT), a government agency under the Ministry of Transport. The second set of data used for calculating the amount of electricity required to travel and to be recharged was obtained from the Office of Transport and Traffic Policy and Planning (OTP), a government agency under the Ministry of Transport, which conducted a travel demand survey of 18,833 house-holds in the city of Bangkok and neighboring provinces. The data obtained were statistically derived for giving the probability density functions of stochastic variables required in EV simulations, such as mileage driven, start charging time, departure time from homes, and the number of trips per day.
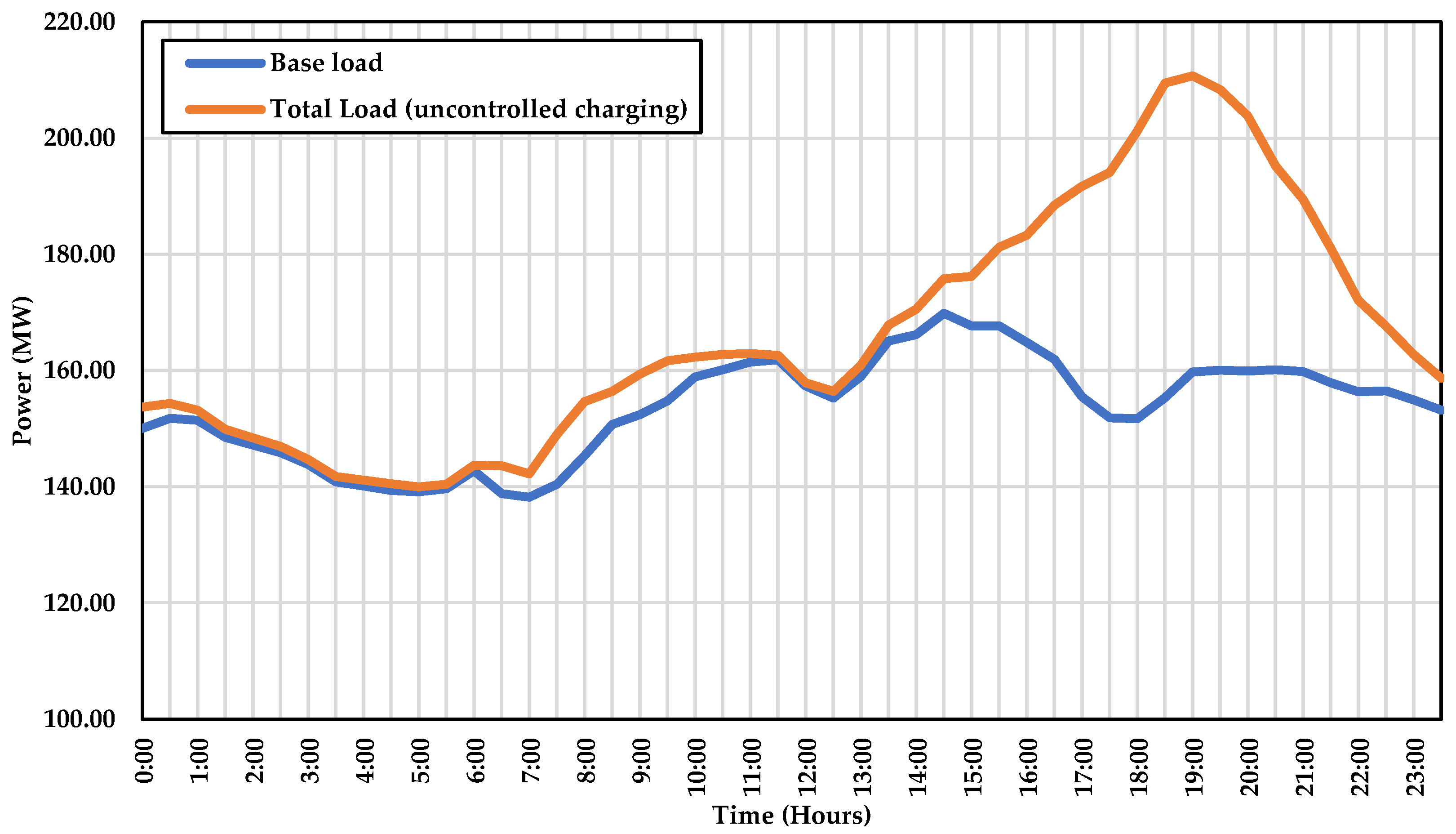
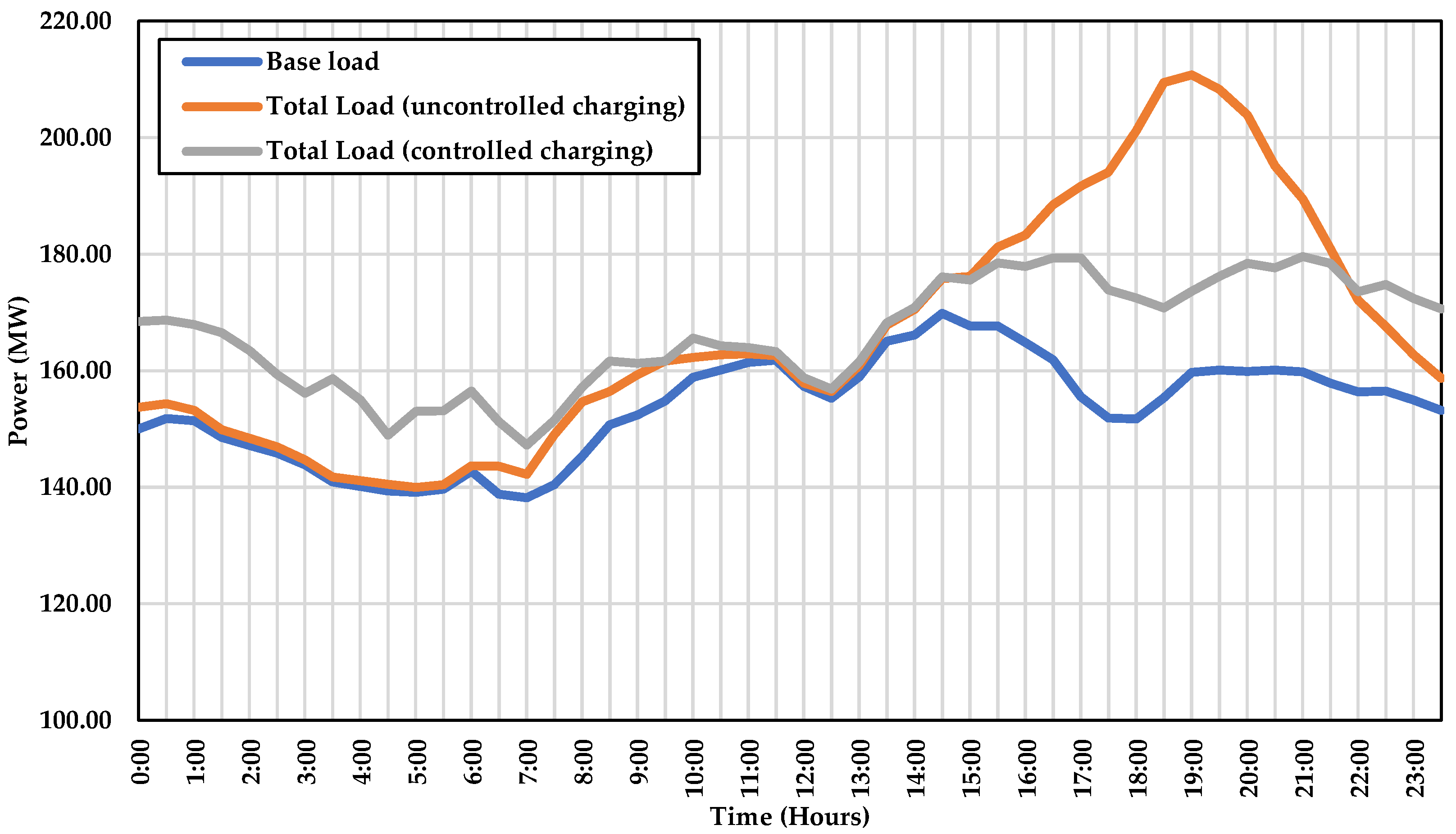
- Load profiles with uncontrolled charging (also known as dumb charging) were simulated with a behavior-based simulation with a number of EVs of 80,000. The simulation results of the charging demand of EVs reveal that the maximum demand would move from 2:30 p.m. to around 7:00 p.m., as most drivers return to their homes and recharge their EVs. Under the conditions of this study, the addition of EV demand could significantly lift the total peak load from 170 to 210 MW. This result can imply that higher levels of EV usage would lead to an outstanding increase in peak power demand and could directly impact the grid. Therefore, the rise of EVs would result in utilities having to invest in power system reinforcement to support the growing demand.
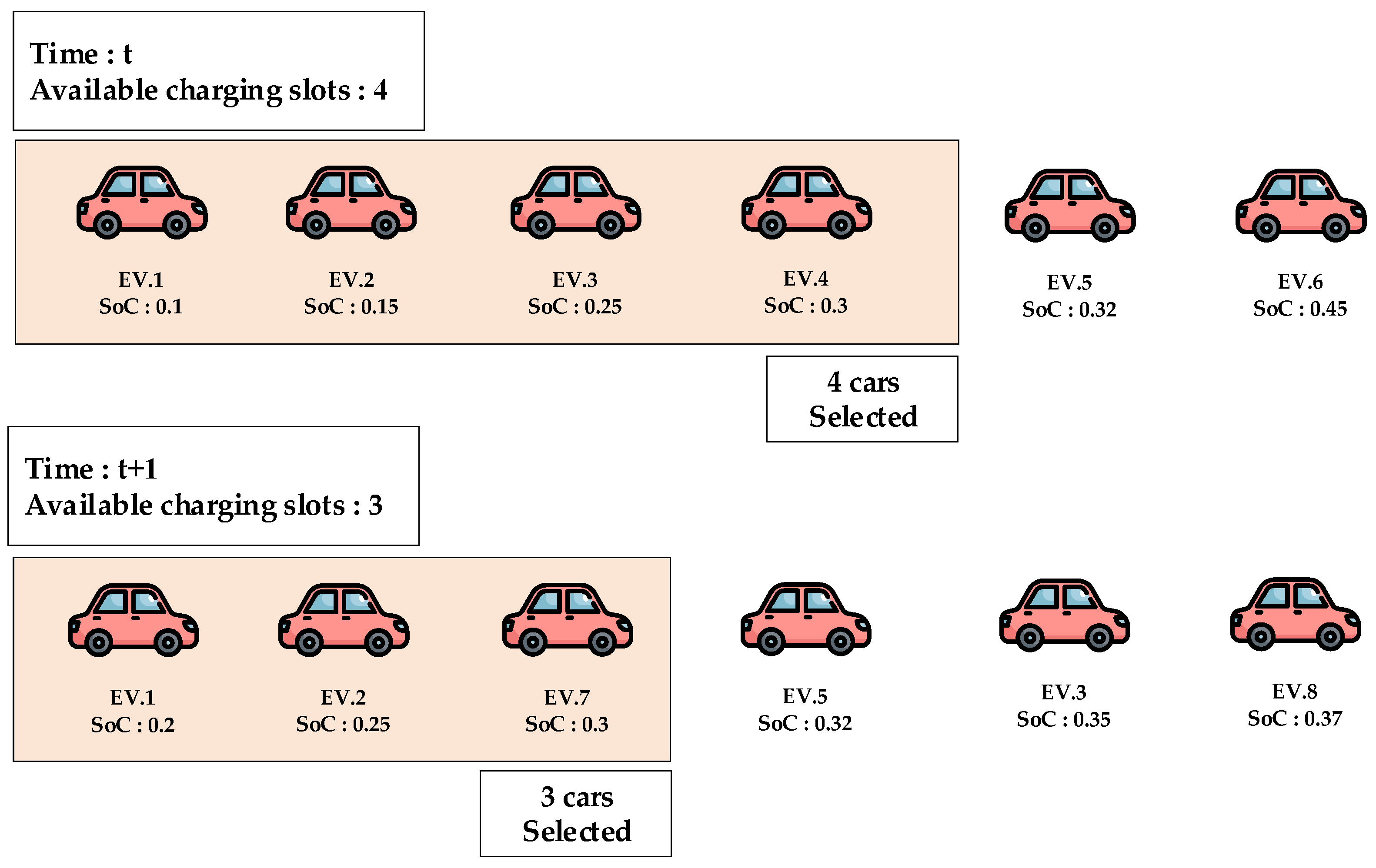
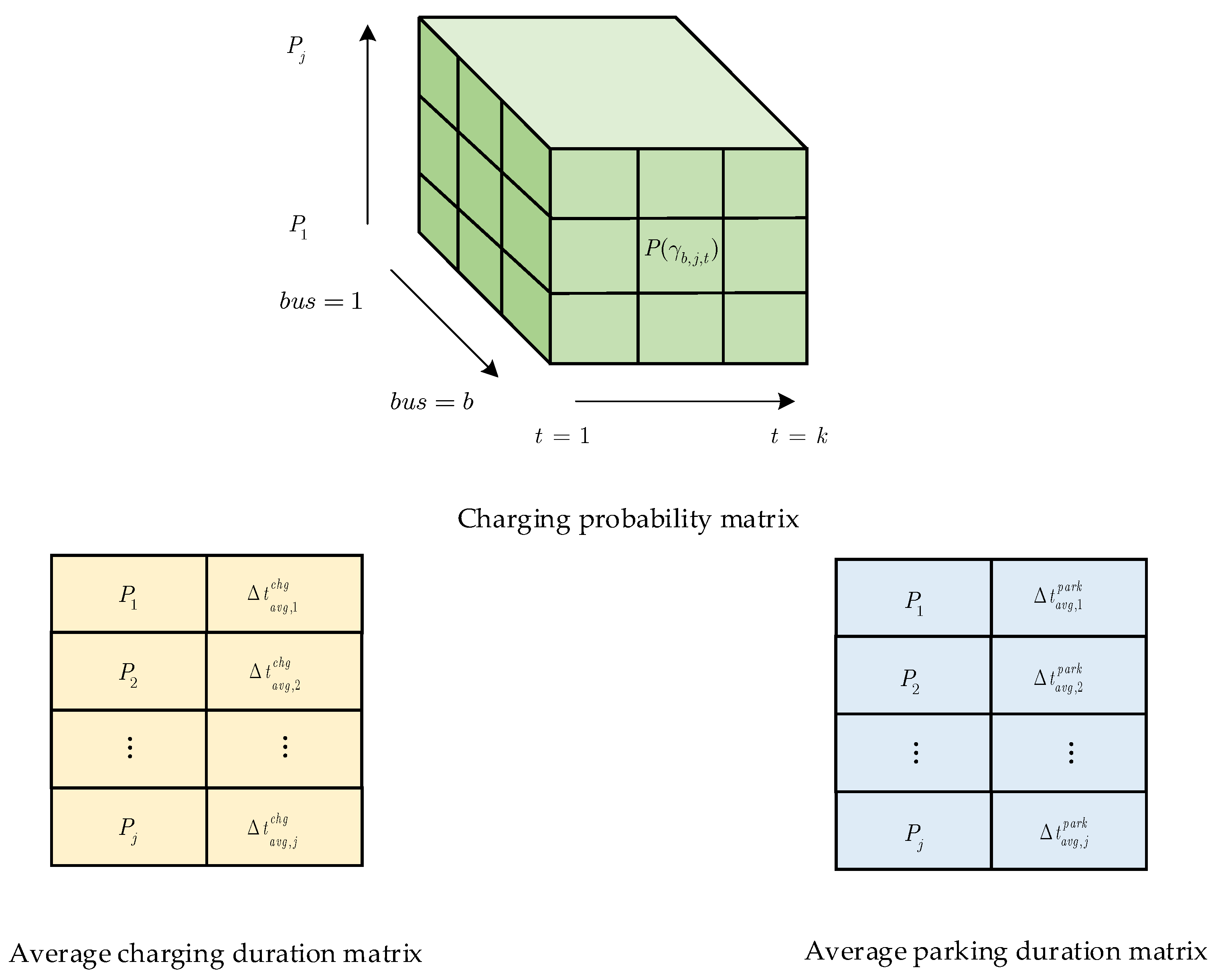
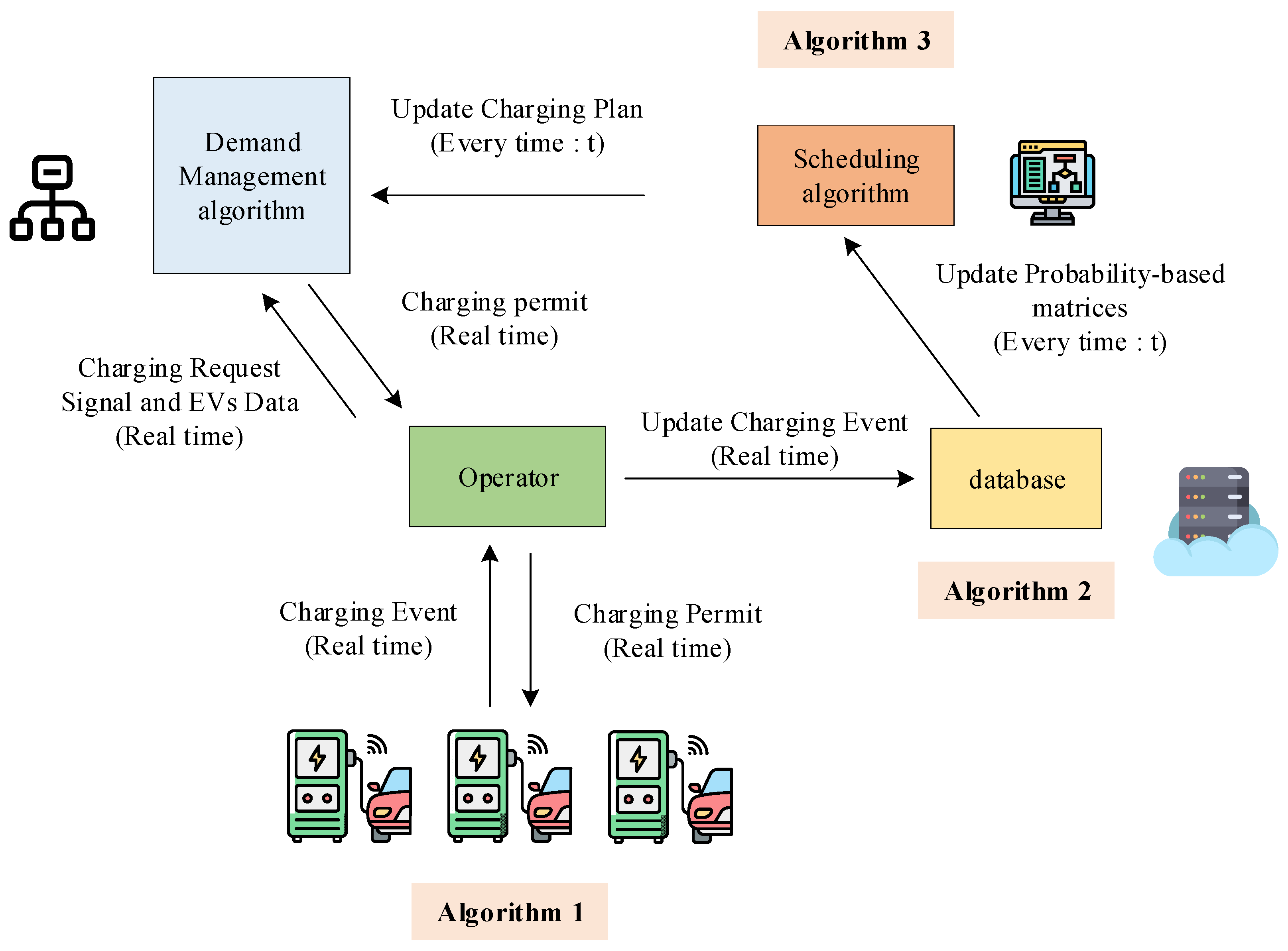
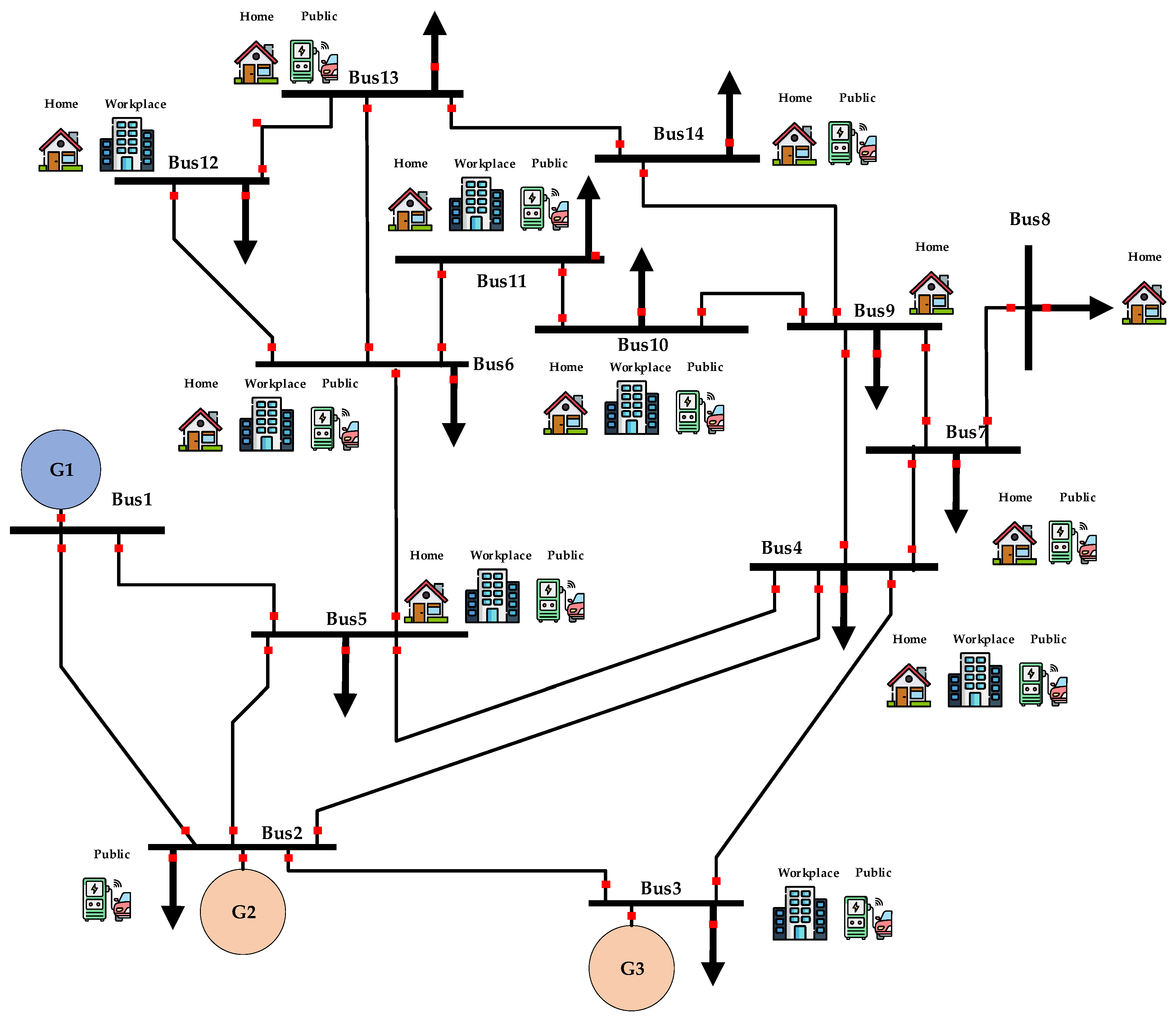
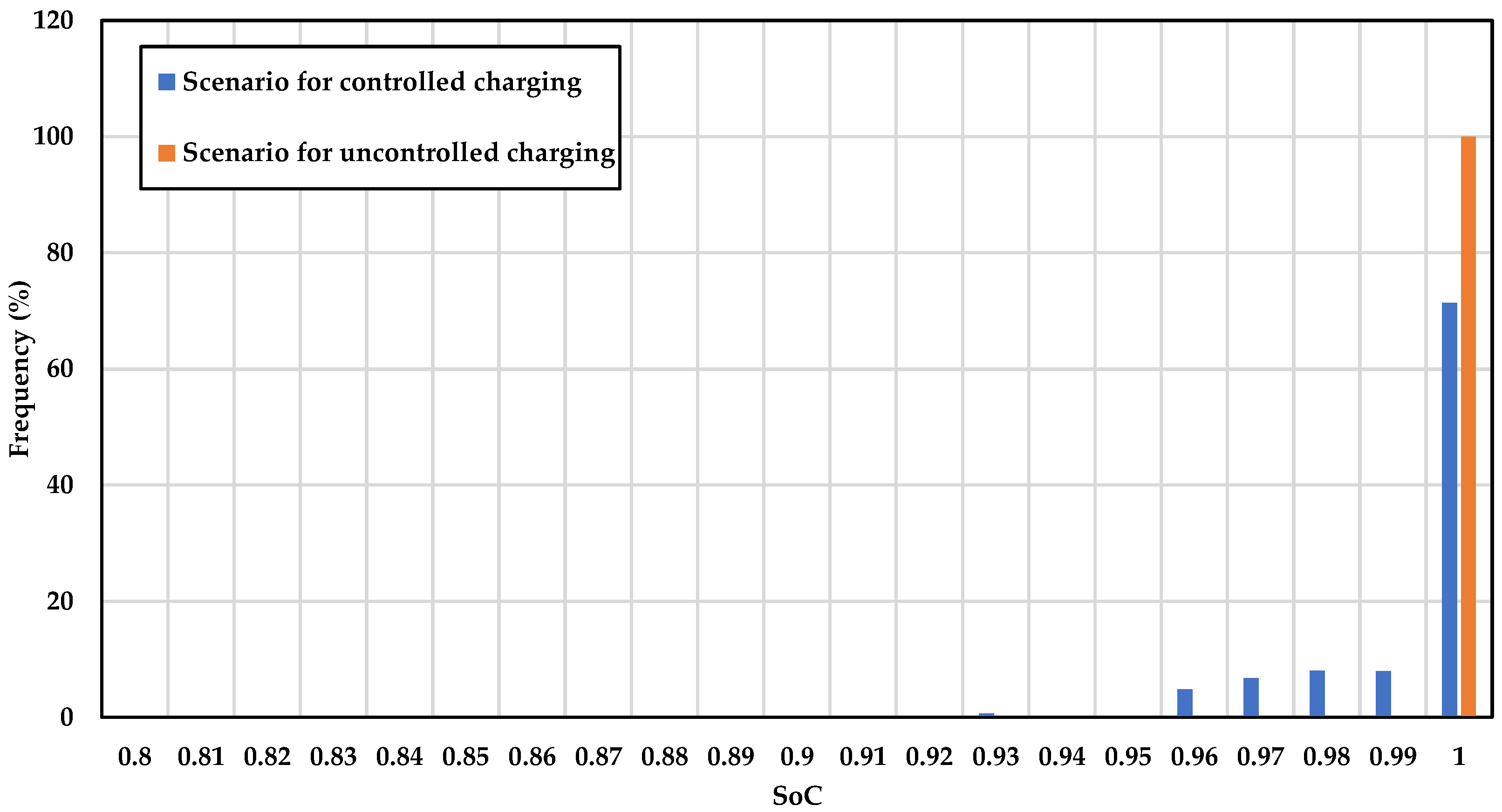
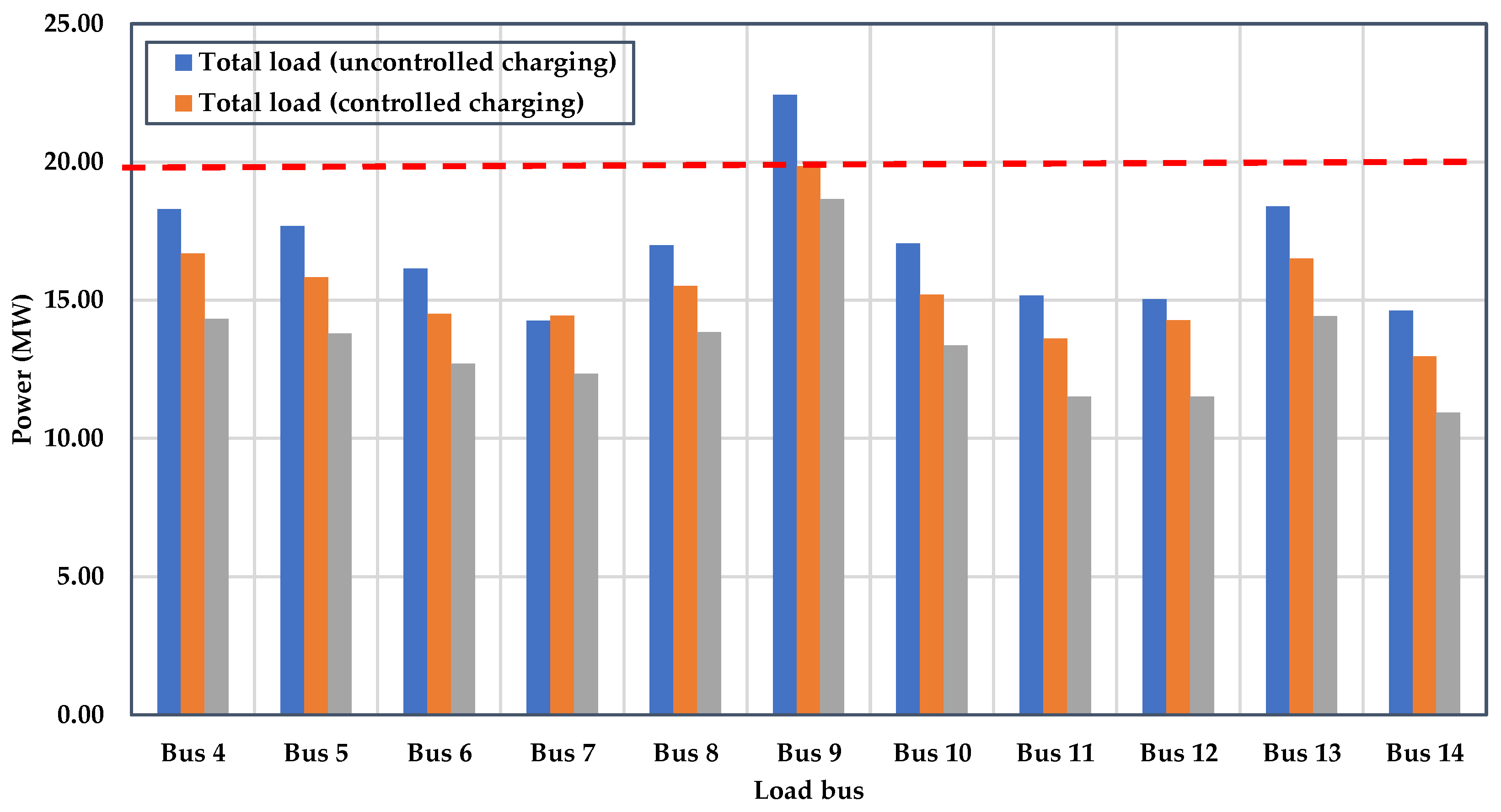
- A scheduling algorithm based on a genetic algorithm (GA) was proposed to define an optimal charging plan (properly available charging slots) in two domains: timeslots and locations. The scheduling algorithm operates along with charging event matrices to capture the charging events of all EVs, taking into account charging location, charging duration, parking duration, charging power, and start charging time. This set of metrics is updated each time EVs are charged. The algorithm can use these matrices as an input to simulate charging events and to define charging slots at each bus on each duration. The objective function of this algorithm is to maximize the system load factor and user satisfaction, subject to three operational constraints: bus voltages, bus powers, and line flow. After obtaining the optimal charging plan, EV queuing management was developed to select those qualified for each timeslot based on two indicators: previous charging duration and SoC. The test results from the modified IEEE 14 bus system can confirm the effectiveness of the developed GA.
3. Key Parameters of EV Modeling
3.1. EV Models
3.2. Types of Chargers
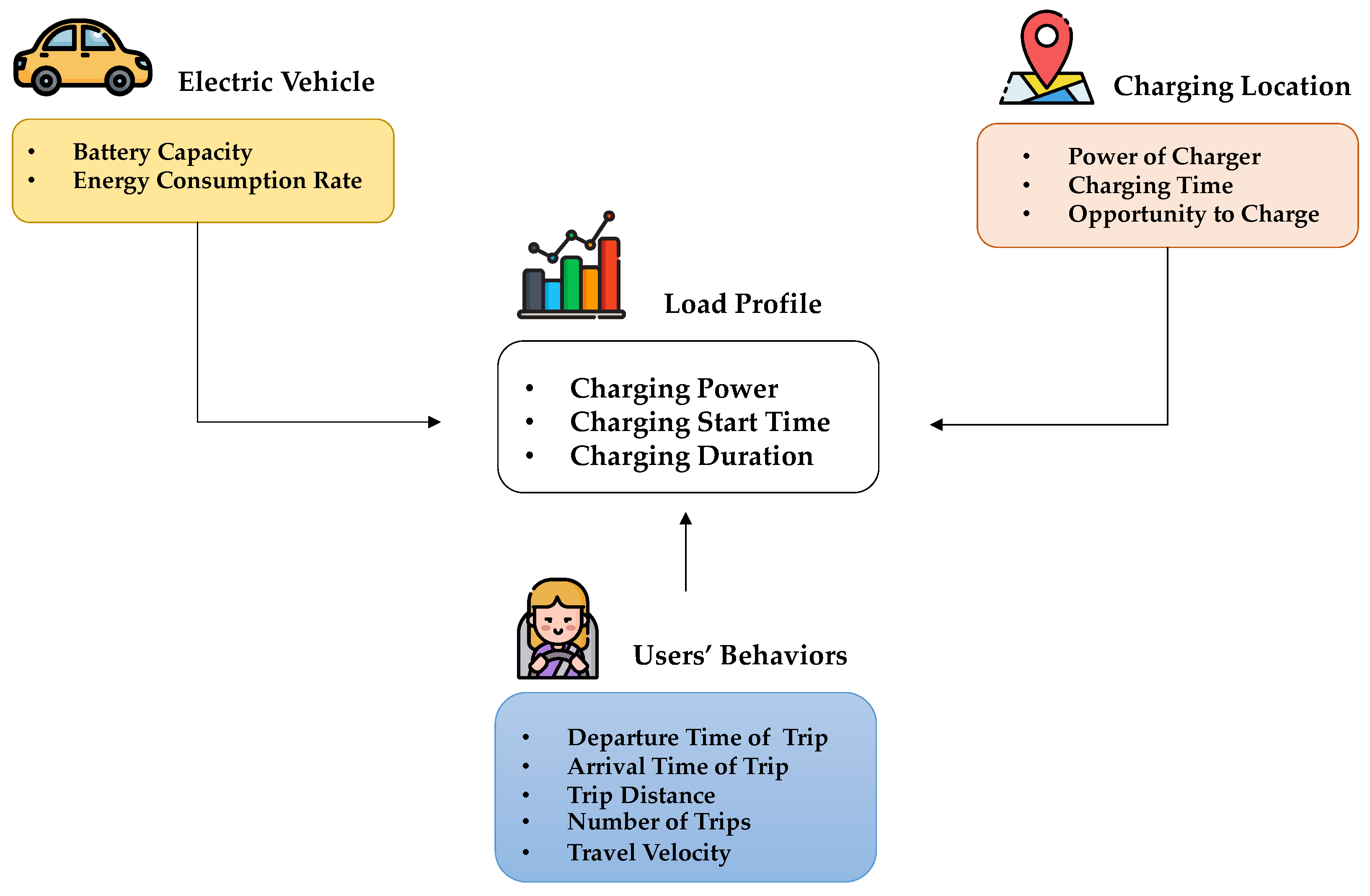
3.3. Driving Behaviors
3.4. Charging Locations
4. Behavior-Based Charging Profile Simulation Algorithm
- Static state is the parking status of EVs. In this state, EVs can be charged or uncharged (idle) based on user decisions. When an EV is charged, it draws electrical power and energy from the network and increases the system load.
- The dynamic state is the mobility state in which EVs are moving from one location to another, meaning that battery power is consumed during the trips.
| Algorithm 1: Pseudocode for behavior-based charging profile | |
| Input | EVs parameters, driving behaviors data, number of EVs, and number of timeslots |
| Output | EVs charging profile at each location (i.e., each bus in the network) and power flow result at each timeslot |
| 1 | Create the characteristics of the EVs by
|
| 2 | Randomize initial departure times (), next locations () of EVs, and max trips per day of EVs () |
| 3 | Set initial locations of all EVs at home (), and |
| 4 | Set all EVs statuses () |
| 5 | Randomize initial charging locations () of all EVs |
| 6 | For to |
| 6-1 | For to |
| 6-1-1 | IF , and |
| 6-1-1-1 | |
| 6-1-1-2 | Calculate , and by (1) and (2) |
| ELSE IF , and | |
| 6-1-1-3 | |
| 6-1-1-4 | |
| 6-1-1-5 | |
| 6-1-1-6 | IF |
| 6-1-1-6-1 | Randomize , and parking duration () |
| 6-1-1-6-2 | Calculate based on (3) |
| ELSE | |
| 6-1-1-6-3 | Randomize departure time (), next location (), and charging location () for the next day |
| 6-1-1-6-4 | Set |
| END IF | |
| END IF | |
| 6-1-2 | IF and , and |
| 6-1-2-1 | ( needs charging) |
| ELSE | |
| 6-1-2-2 | ( is idle) |
| END IF | |
| END FOR | |
| 6-2 | Define charging permission of EVs () • For uncontrolled charging, all EVs are allowed to be charged and continue to Step 6-3 • For controlled charging, only some of the EVs are allocated using the EV queuing management defined by Algorithm 3 then continue to Step 6-3 |
| 6-3 | Collect EV charging events (refer to Algorithm 2) |
| 6-4 | For to |
| 6-4-1 | IF |
| 6-4-1-1 | Charge , and calculate by (4) |
| 6-4-1-2 | Calculate the charging load at each location () by (5) |
| END IF | |
| END FOR | |
| 6-5 | Calculate total load () by (6) |
| 6-6 | Perform power flow analysis by the Newton–Raphson iterative algorithm [32] |
| END FOR | |
| Algorithm 2: Pseudocode for charging event matrices | |
| Input | EV charging event data, number of EVs, and number of timeslots |
| Output | Charging event matrices |
| 1 | For to |
| 1-1 | For to |
| 1-1-1 | IF and |
| 1-1-1-1 | Collect charging event () along with location (bus ), charging power () and time () of |
| 1-1-1-2 | Calculate charging duration () and parking duration () by (8) and (9) respectively |
| 1-1-1-3 | Store all charging event data (, , ) of this event to the database |
| END IF | |
| END FOR | |
| END FOR | |
| 2 | Calculate charging event matrices
|
| Algorithm 3: Pseudocode for GA-based scheduling | |
| Input | Charging event matrices, EVs, number of timeslots, number of chromosomes, and number of generations |
| Output | Charging plan (optimal charging slots at each timeslot) |
| 1 | Randomize initial values of first-generation chromosomes (available charging slots) |
| 2 | For to |
| 2-2 | For to |
| 2-2-1 |
Create charging event characteristic of all EVs • Randomize charging location , power () and start time () based on the charging probability matrix • Determine the tentative charging duration of each EV and parking duration • Calculate available charging interval using and |
| 2-2-2 | For to |
| 2-2-2-1 | For to |
| 2-2-2-1-1 | IF and |
| 2-2-2-1-1-1 | ( needs charging) |
| ELSE | |
| 2-2-2-1-1-2 | ( is idle) |
| END IF | |
| END FOR | |
| 2-2-2-2 | Define charging permission of EVs () based on both the EV queuing management method and the available charging slots |
| 2-2-2-3 | For to |
| 2-2-2-3-1 | IF |
| 2-2-2-3-1-1 | |
| 2-2-2-3-1-2 | Calculate charging load () by (5) |
| END IF | |
| END FOR | |
| END FOR | |
| 2-2-3 | Calculate total load () by (6) and obtain maximum total load () |
| 2-2-4 | Estimate preferred charging duration () and controlled charging duration () by (14) and (15) |
| 2-2-5 | Perform power flow analysis to obtain the peak power at each bus, and active and reactive power flow of each line |
| 2-2-6 | Apply a penalty constant (e.g., 106) for constraint violation in (16) to (18) |
| 2-2-7 | Evaluate the fitness of chromosome by (13) |
| END FOR | |
| 2-3 | Select and keep the best fitness from population |
| 2-4 | Bring population to the crossover, mutation process, and chromosome reproduction |
| END FOR | |
5. Smart Charging by Direct Load Control Technique
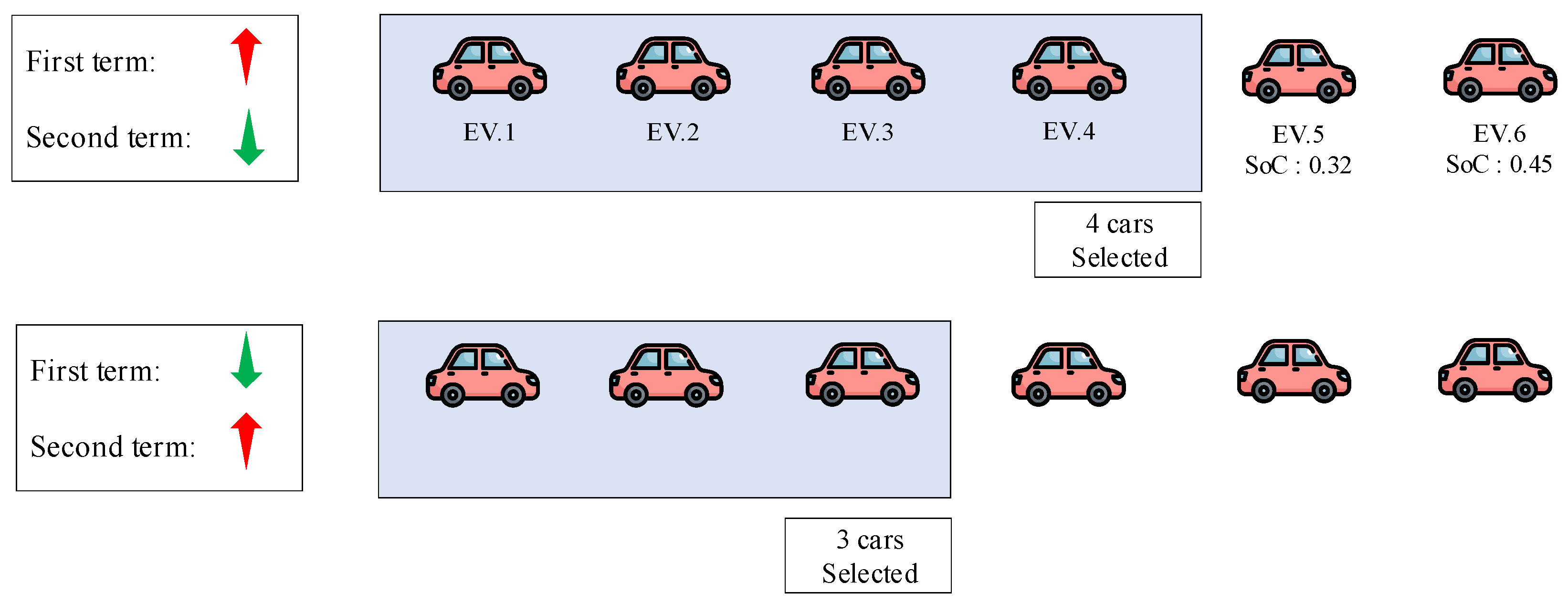
5.1. EV Queuing Management
5.2. Charging Slot Optimization by Genetic Algorithm
6. Case Study
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| number of timeslots | |
| number of EVs | |
| number of buses | |
| number of iterations | |
| number of charging powers | |
| number of charging events caused by | |
| number of generations | |
| number of chromosomes | |
| status of | |
| current location of | |
| next location of | |
| charging location of | |
| charging status of | |
| numbers of trip of | |
| maximum numbers of trip of | |
| charging permission of | |
| departure time of | |
| arrival time of | |
| parking duration of | |
| duration of each timeslot | |
| distance per trip of | |
| travel velocity at time | |
| battery capacity of | |
| state of charge of | |
| energy consumption rate of | |
| charging power of | |
| load profile of bus at time | |
| total load profile | |
| maximum total load profile of all iteration | |
| charging duration of | |
| charging power of charger | |
| amount of charging event at bus , power , and time | |
| charging probability at bus , power , and time | |
| average charging duration at power | |
| charging duration of EVi times n with charging power at y level | |
| average parking duration at power j | |
| parking duration of EVi times n with charging power at y level | |
| maximum total load (load with EVs charging demand) | |
| maximum base load (load without EVs charging demand) | |
| preferred charging duration of EVs | |
| controlled charging duration of EVs | |
| weight coefficient of load reduction term | |
| weight coefficient of user satisfaction term | |
| tentative charging duration of | |
| real charging duration of | |
| lower limit voltage of bus | |
| upper limit voltage of bus | |
| voltage of bus | |
| lower limit active power of bus | |
| upper limit active power of bus | |
| active power of bus | |
| lower limit appearance power of line | |
| upper limit appearance power of line | |
| appearance power of line | |
| available charging slots bus and time | |
| start charging time of | |
| end charging time of |
References
- Ehsani, M.; Singh, K.V.; Bansal, H.O.; Mehrjardi, R.T. State of the art and trends in electric and hybrid electric vehicles. Proc. IEEE 2021, 109, 967–984. [Google Scholar] [CrossRef]
- Parajuly, K.; Ternald, D.; Kuehr, R. The Future of Electric Vehicles and Material Resources: A Foresight Brief; UNU/UNITAR-SCYCLE: Bonn, Germany; UNEP-IETC: Osaka, Japan, 2020. [Google Scholar]
- Barkenbus, J. Prospects for Electric Vehicles. Sustainability 2020, 12, 5813. [Google Scholar] [CrossRef]
- Dharmakeerthi, C.H.; Mithulananthan, N.; Saha, T.K. Overview of the impacts of plug-in electric vehicles on the power grid. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Perth, Australia, 13–16 November 2011; pp. 1–8. [Google Scholar] [CrossRef]
- McCarthy, D.; Wolfs, P. The HV system impacts of large scale electric vehicle deployments in a metropolitan area. In Proceedings of the 20th Australasian Universities Power Engineering Conference, New York, NY, USA, 5–8 December 2010; pp. 1–6. [Google Scholar]
- Ni, X.; Lo, K.L. A methodology to model daily charging load in the EV charging stations based on Monte Carlo simulation. In Proceedings of the 2020 International Conference on Smart Grid and Clean Energy Technologies (ICSGCE), Kuching, Malaysia, 4–7 October 2020. [Google Scholar] [CrossRef]
- Ramadan, H.; Ali, A.; Farkas, C. Assessment of plug-in electric vehicles charging impacts on residential low voltage distribution grid in Hungary. In Proceedings of the 2018 6th International Istanbul Smart Grids and Cities Congress and Fair, ICSG 2018, Istanbul, Turkey, 25–26 April 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018; pp. 105–109. [Google Scholar] [CrossRef]
- Liu, D.; Li, Z.; Jiang, J.; Cheng, X.; Wu, G. Electric Vehicle Load Forecast Based on Monte Carlo Algorithm. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020; pp. 1760–1763. [Google Scholar] [CrossRef]
- Liu, Z.; Xie, Y.; Feng, D.; Zhou, Y.; Shi, S.; Fang, C. Load forecasting model and day-ahead operation strategy for city-located EV quick charge stations. In Proceedings of the 8th Renewable Power Generation Conference (RPG 2019), Shanghai, China, 24–25 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Shareef, H.; Islam, M.M.; Mohamed, A. A review of the stage-of-the-art charging technologies, placement methodologies, and impacts of electric vehicles. Renew. Sustain. Energy Rev. 2016, 64, 403–420. [Google Scholar] [CrossRef]
- Karmaker, A.K.; Roy, S.; Ahmed, R. Analysis of the Impact of Electric Vehicle Charging Station on Power Quality Issues. In Proceedings of the 2019 International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’sBazar, Bangladesh, 7–9 February 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Lino, V.; Camargo, W.; Francato, A.L. Energy Quality impact with Electric vehicles insertion in Brazil. In Proceedings of the 2021 IEEE PES/IAS PowerAfrica, Online, 23–27 August 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Vosoogh, M.; Rashidinejad, M.; Abdollahi, A.; Ghaseminezhad, M. An intelligent day ahead energy management framework for networked microgrids considering high penetration of electric vehicles. IEEE Trans. Ind. Inform. 2020, 17, 667–677. [Google Scholar] [CrossRef]
- Hadian, E.; Akbari, H.; Farzinfar, M.; Saeed, S. Optimal Allocation of Electric Vehicle Charging Stations With Adopted Smart Charging/Discharging Schedule. IEEE Access 2020, 8, 196908–196919. [Google Scholar] [CrossRef]
- Mroczek, B.; Kolodynska, A. The V2G process with the predictive model. IEEE Access 2020, 8, 86947–86956. [Google Scholar] [CrossRef]
- Said, D.; Mouftah, H.T. A Novel Electric Vehicles Charging/Discharging Management Protocol Based on Queuing Model. IEEE Trans. Intell. Veh. 2019, 5, 100–111. [Google Scholar] [CrossRef]
- Uimonen, S.; Lehtonen, M. Simulation of electric vehicle charging stations load profiles in office buildings based on occupancy data. Energies 2020, 13, 5700. [Google Scholar] [CrossRef]
- The Model and Registration Number of Electric Vehicles in Thailand. Available online: https://www.dlt.go.th/statistics (accessed on 1 August 2021).
- The Electric Vehicle Performance. Available online: https://www.ev-database.org (accessed on 1 August 2021).
- Xia, Y.; Hu, B.; Xie, K.; Tang, J.; Tai, H.-M. An EV charging demand model for the distribution system using traffic property. IEEE Access 2019, 7, 28089–28099. [Google Scholar] [CrossRef]
- Rinaldi, S.; Pasetti, M.; Sisinni, E.; Bonafini, F.; Ferrari, P.; Rizzi, M.; Flammini, A. On the mobile communication requirements for the demand-side management of electric vehicles. Energies 2018, 11, 1220. [Google Scholar] [CrossRef] [Green Version]
- Chaudhari, K.S.; Kandasamy, N.K.; Krishnan, A.; Ukil, A.; Gooi, H.B. Agent-Based Aggregated Behavior Modeling for Electric Vehicle Charging Load. IEEE Trans. Ind. Inform. 2018, 15, 856–868. [Google Scholar] [CrossRef]
- Zhang, K.; Zhou, S. Data-driven analysis of electric vehicle charging behavior and its potential for demand side management. IOP Conf. Series: Earth Environ. Sci. 2019, 223, 012034. [Google Scholar] [CrossRef]
- Yeo, S.; Lee, D.-J. Selecting the optimal charging strategy of electric vehicles using simulation based on users’ behavior pattern data. IEEE Access 2021, 9, 89823–89833. [Google Scholar] [CrossRef]
- The Average Travel Velocity of Vehicles in Bangkok and Its Vicinity, Thailand. Available online: https://traffic.longdo.com/ (accessed on 1 August 2021).
- EPRI. Consumer Guide to Electric Vehicle Charging; Electric Power Research Institute (EPRI): Palo Alto, CA, USA, 2019. [Google Scholar]
- Fuels Institute. EV Consumer Behavior; Fuels Institute: Alexandria, VA, USA, 2021. [Google Scholar]
- Element Energy Limited. Electric Vehicle Charging Behavior Study; Element Energy Limited: Cambridge, UK, 2019. [Google Scholar]
- Figenbaum, E. Battery Electric Vehicle fast charging–evidence from the Norwegian market. World Electr. Veh. J. 2020, 11, 38. [Google Scholar] [CrossRef]
- Dong, L.; Wang, C.; Li, M.; Sun, K.; Chen, T.; Sun, Y. User decision-based analysis of urban EV load. CSEE J. Power Energy Syst. 2020, 7, 190–200. [Google Scholar] [CrossRef]
- Lin, H.; Fu, K.; Liu, Y.; Sun, Q.; Wennersten, R. Modeling charging demand of electric vehicles in multi-locations using agent-based method. Energy Procedia 2018, 152, 599–605. [Google Scholar] [CrossRef]
- Grainger, J.; Stevenson, W. Power System Analysis; Mc GrawHill: New York, NY, USA, 1996. [Google Scholar]
- Chen, N.; Wang, M.; Zhang, N.; Shen, X. Energy and information management of electric vehicular network: A survey. IEEE Commun. Surv. Tutor. 2020, 22, 967–997. [Google Scholar] [CrossRef]
- Mukherjee, J.C.; Gupta, A. A review of charge scheduling of electric vehicles in smart grid. IEEE Syst. J. 2015, 9, 1541–1553. [Google Scholar] [CrossRef]
- Winston, W.L.; Venkataramanan, M. Introduction to Mathematical Programming: Operations Research, 4th ed.; Thomson Learning, Inc.: Boston, MA, USA, 2002; Volume 1. [Google Scholar]
- The Cost of Electricity Generation and Transmission. Available online: https://www.egat.co.th (accessed on 1 February 2022).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Battery Size (kWh) | Energy Consumption Rate (kWh/km) | Market Share (%) |
|---|---|---|---|
| ZS EV | 44.5 | 0.193 | 63.91 |
| ONE | 11.8 | 0.067 | 13.36 |
| E6 | 80 | 0.260 | 5.34 |
| LEAF | 40 | 0.164 | 4.76 |
| MODEL 3 PERFORMANCE | 82.0 | 0.162 | 1.60 |
| MODEL 3 LONG RANGE | 75 | 0.154 | 1.51 |
| E-TRON 55 Q | 95 | 0.237 | 1.46 |
| Others | - | - | 8.06 |
| Level | Charging Power (kW) | Location |
|---|---|---|
| Charging Level 1 (AC) | 1.4–1.9 kW (single-phase) | Residential and Commercial building |
| Charging Level 2 (AC) | 7.7–25.6 kW (single-phase/three-phase) | Private or Public |
| Charging Level 3 (DC Level 1) | 13–39 kW (three-phase) | Public |
| Charging Level 3 (DC Level 2) | 33–96 kW (three-phase) | Public |
| Generator No. | Bus | Type | Voltage (pu.) | Power (MW) |
|---|---|---|---|---|
| 1 | 1 | Slack | 1.01 | - |
| 2 | 2 | PV | 1.01 | 55 |
| 3 | 3 | PV | 1.01 | 55 |
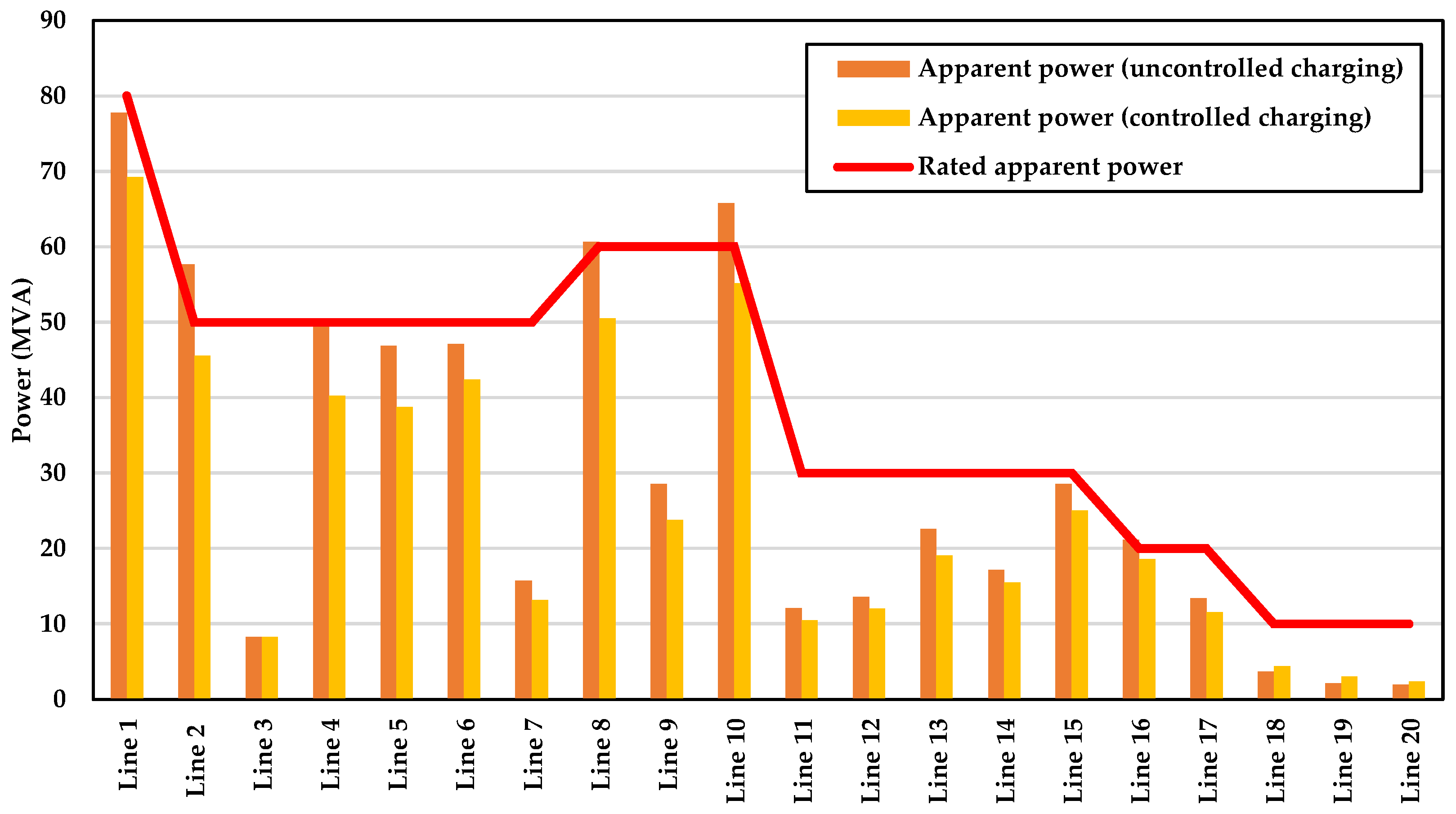
| Line No. | From Bus | To Bus | Resistance (ohm) | Reactance (ohm) | Line Limit (MVA) |
|---|---|---|---|---|---|
| 1 | 1 | 2 | 0.04 | 0.11 | 80 |
| 2 | 1 | 5 | 0.10 | 0.42 | 50 |
| 3 | 2 | 3 | 0.09 | 0.38 | 50 |
| 4 | 2 | 4 | 0.11 | 0.34 | 50 |
| 5 | 2 | 5 | 0.11 | 0.33 | 50 |
| 6 | 3 | 4 | 0.13 | 0.33 | 50 |
| 7 | 4 | 5 | 0.03 | 0.08 | 50 |
| 8 | 4 | 7 | 0.00 | 0.40 | 60 |
| 9 | 4 | 9 | 0.00 | 1.06 | 60 |
| 10 | 5 | 6 | 0.00 | 0.48 | 60 |
| 11 | 6 | 11 | 0.18 | 0.38 | 30 |
| 12 | 6 | 12 | 0.23 | 0.49 | 30 |
| 13 | 6 | 13 | 0.13 | 0.25 | 30 |
| 14 | 7 | 8 | 0.00 | 0.34 | 30 |
| 15 | 7 | 9 | 0.00 | 0.21 | 30 |
| 16 | 9 | 10 | 0.06 | 0.16 | 20 |
| 17 | 9 | 14 | 0.24 | 0.51 | 20 |
| 18 | 10 | 11 | 0.16 | 0.37 | 10 |
| 19 | 12 | 13 | 0.42 | 0.38 | 10 |
| 20 | 13 | 14 | 0.33 | 0.66 | 10 |
| Uncontrolled Charging | Controlled Charging | Difference | |
|---|---|---|---|
| Peak power demand (MW) | 210.74 | 179.56 | 14.79% |
| Load factor | 0.79 | 0.93 | 17.35% |
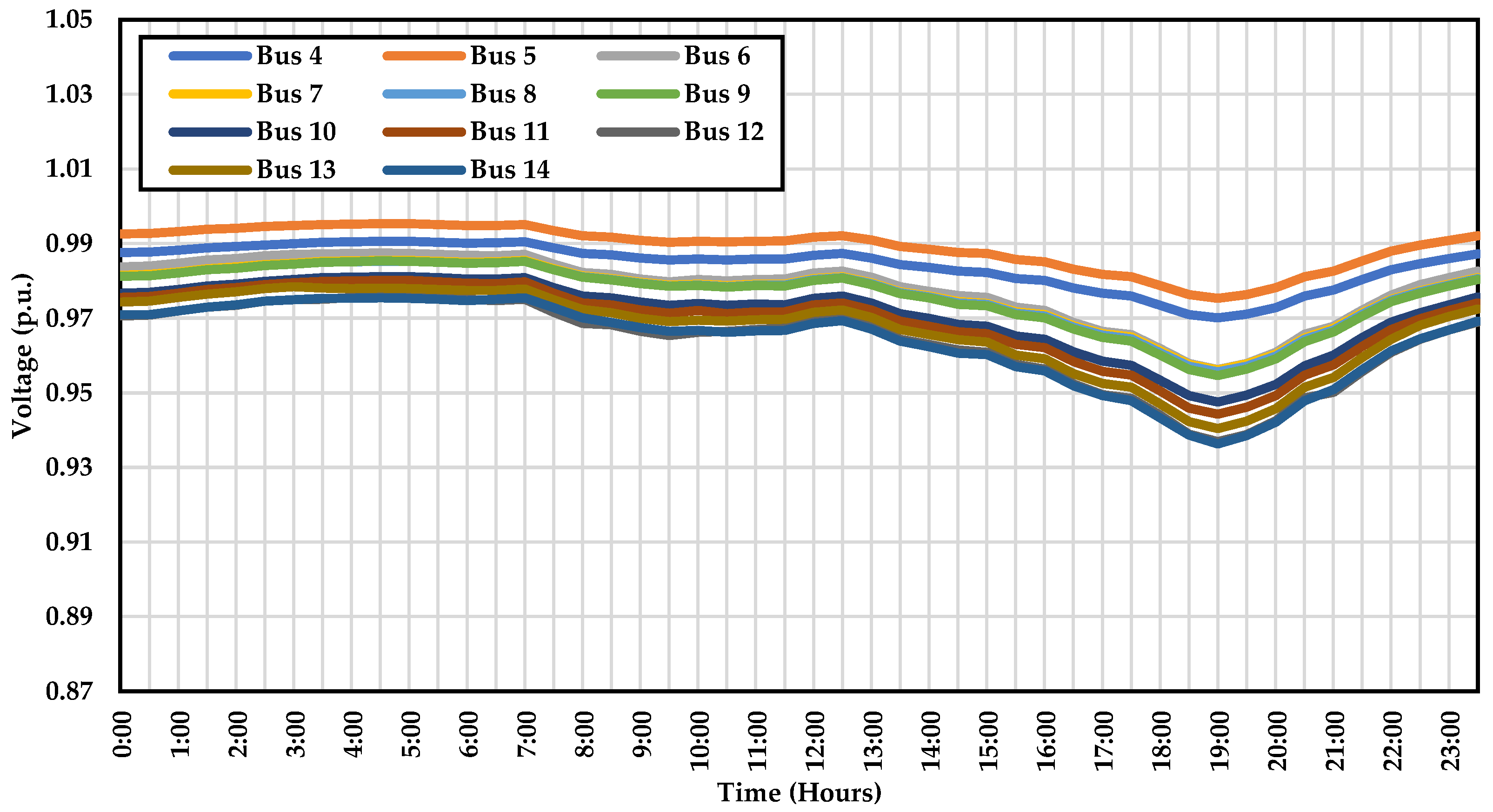
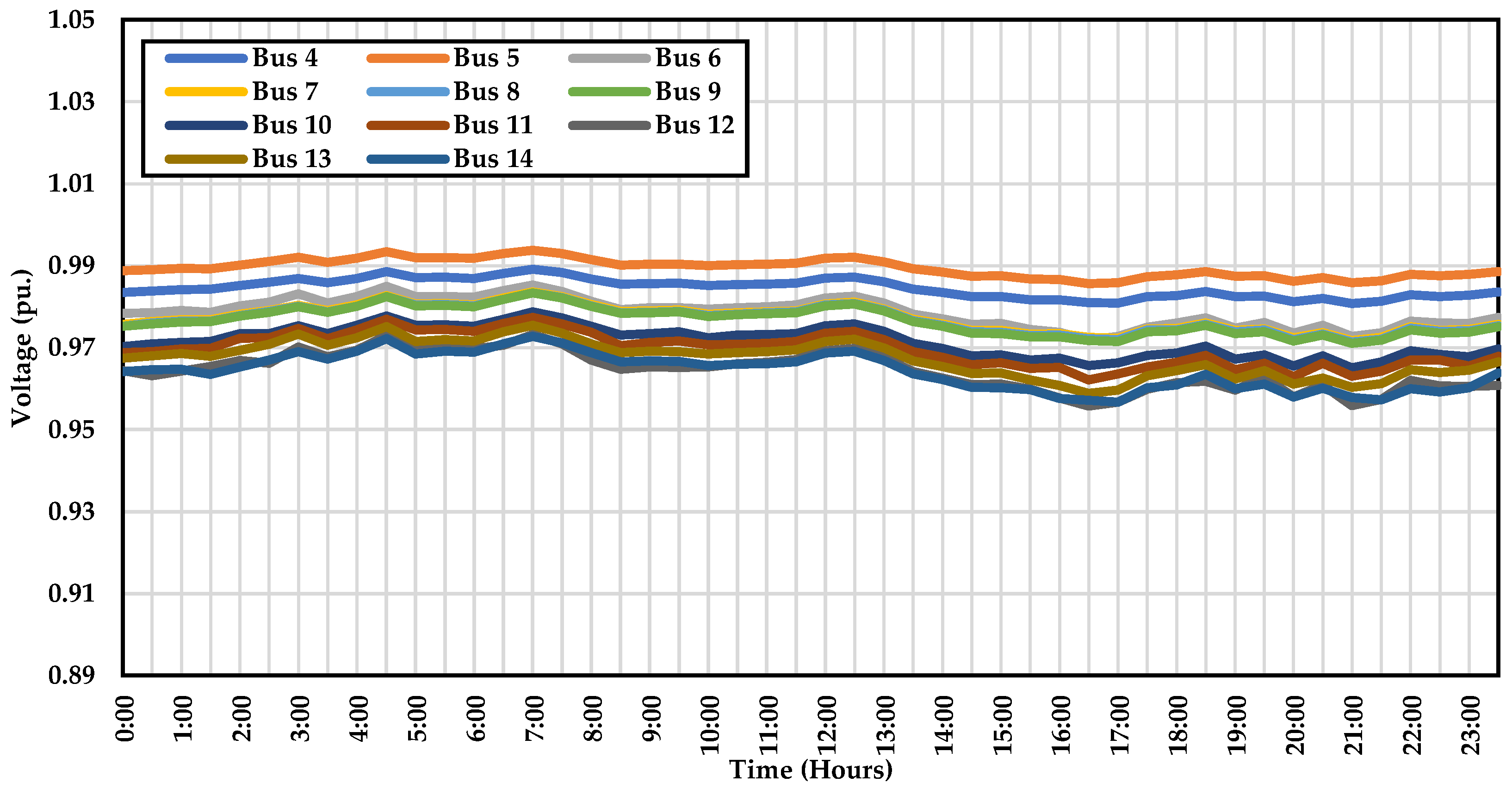
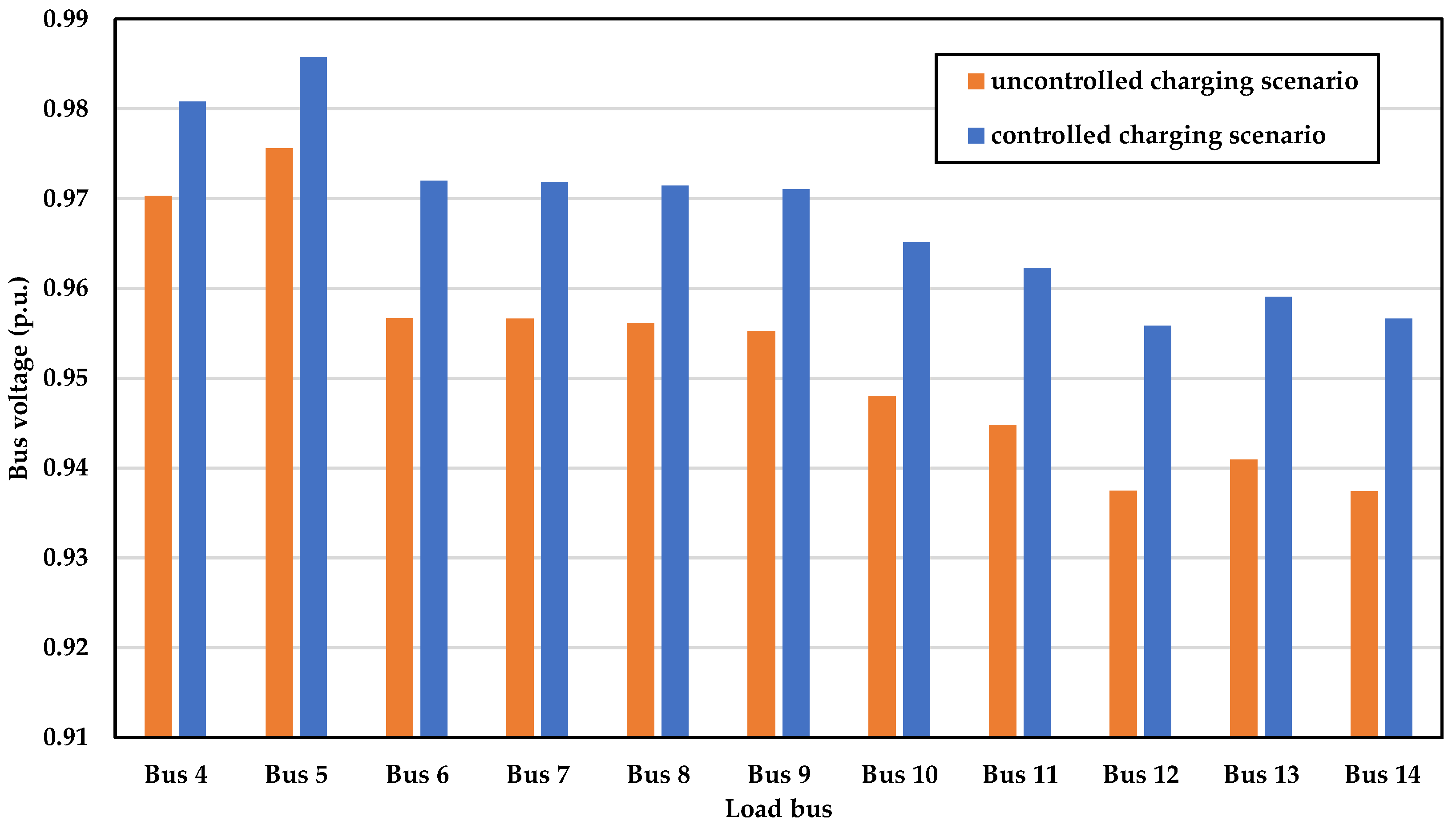
| Maximum voltage drop (p.u.) | 0.937 | 0.956 | 1.96% |
| Charging energy (MWh) | 304.78 | 304.26 | 0.17% |
| Energy loss (MWh) | 119.85 | 116.92 | 2.44% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piamvilai, N.; Sirisumrannukul, S. Optimal Scheduling of Movable Electric Vehicle Loads Using Generation of Charging Event Matrices, Queuing Management, and Genetic Algorithm. Energies 2022, 15, 3827. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103827
Piamvilai N, Sirisumrannukul S. Optimal Scheduling of Movable Electric Vehicle Loads Using Generation of Charging Event Matrices, Queuing Management, and Genetic Algorithm. Energies. 2022; 15(10):3827. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103827
Chicago/Turabian StylePiamvilai, Nattavit, and Somporn Sirisumrannukul. 2022. "Optimal Scheduling of Movable Electric Vehicle Loads Using Generation of Charging Event Matrices, Queuing Management, and Genetic Algorithm" Energies 15, no. 10: 3827. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103827