SOC Based Battery Cell Balancing with a Novel Topology and Reduced Component Count



Abstract
:1. Introduction
2. The Proposed Balancing Topology
2.1. Analysis of the Existing Balancing Topologies

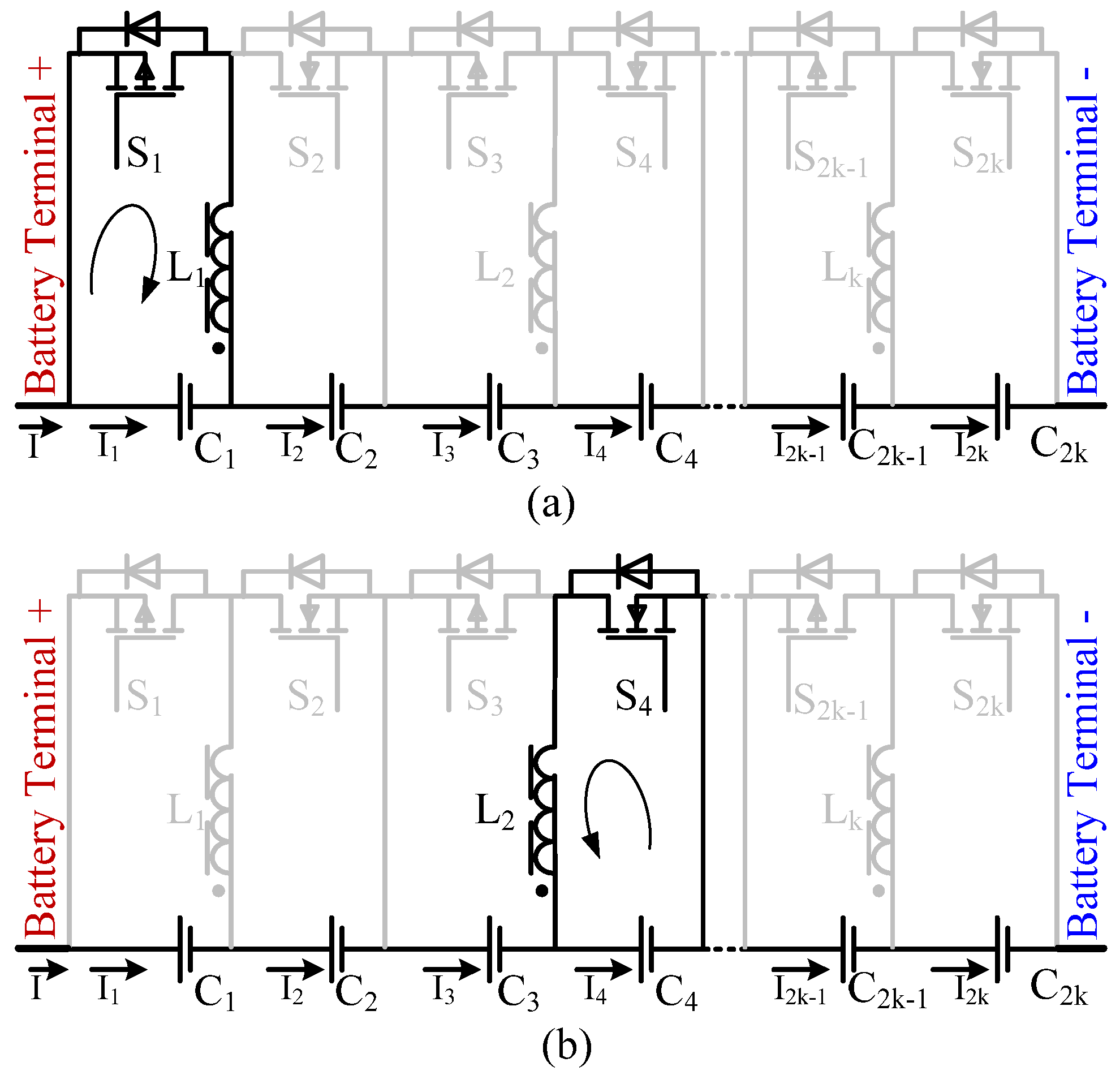
2.2. The Proposed Balancing Topology


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Topology 1 | Topology 2 | Topology 3 | The proposed topology |
|---|---|---|---|---|
| Windings | n − 1 | 2n | n + 1 | n/2 |
| Ferrite cores | 0 | n | 1 | 1 |
| Switches | 2n − 2 | 2n | n + 1 | n |
| Number of switches suffering high voltage stress | 0 | n | 1 | 0 |
| Balancing type | Between adjacent cells | Between cell and string | Between cell and string | Between arbitrary cells |


3. Analysis of SOC Based Balancing Algorithm
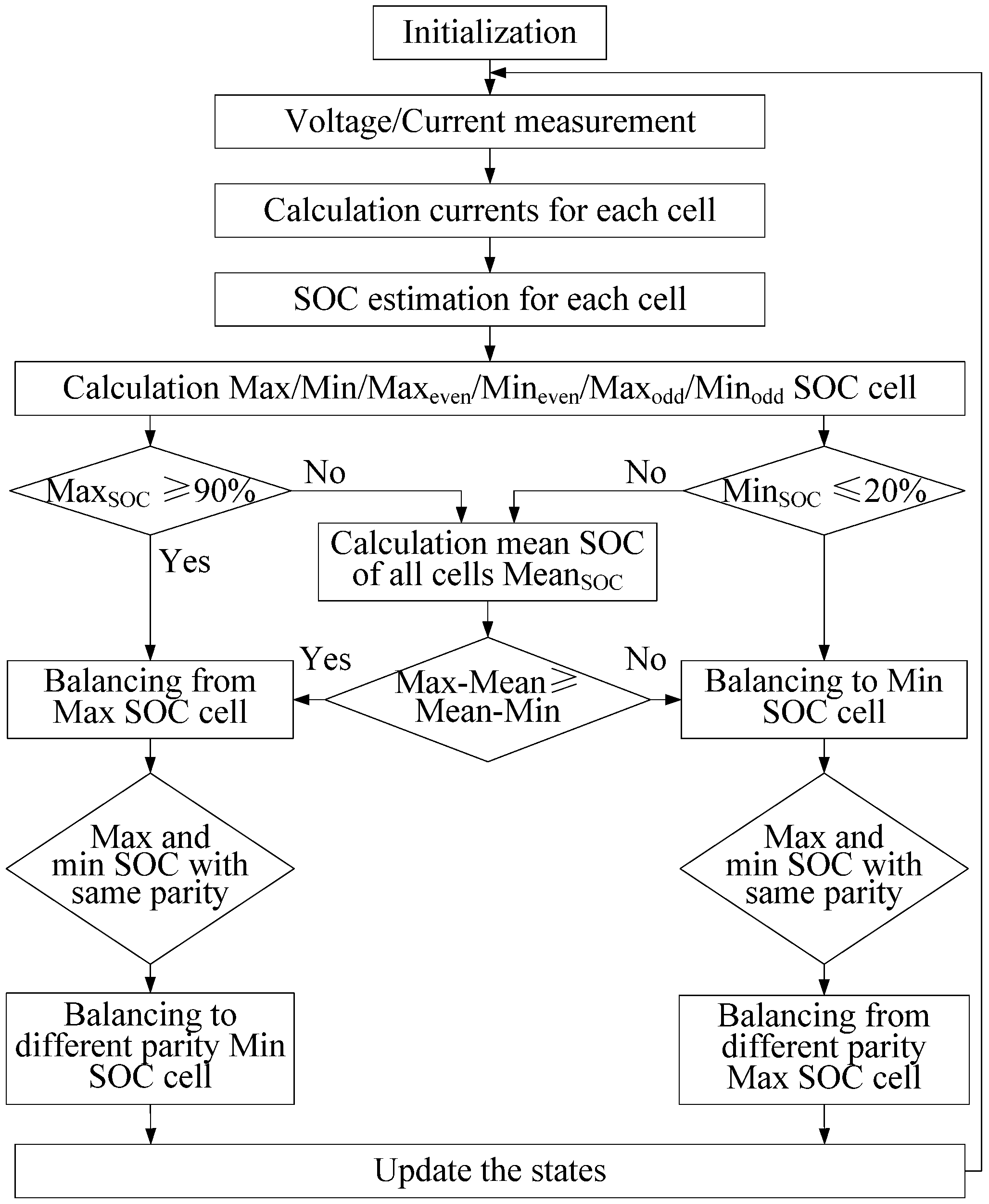
3.1. SOC Based Balancing Strategy

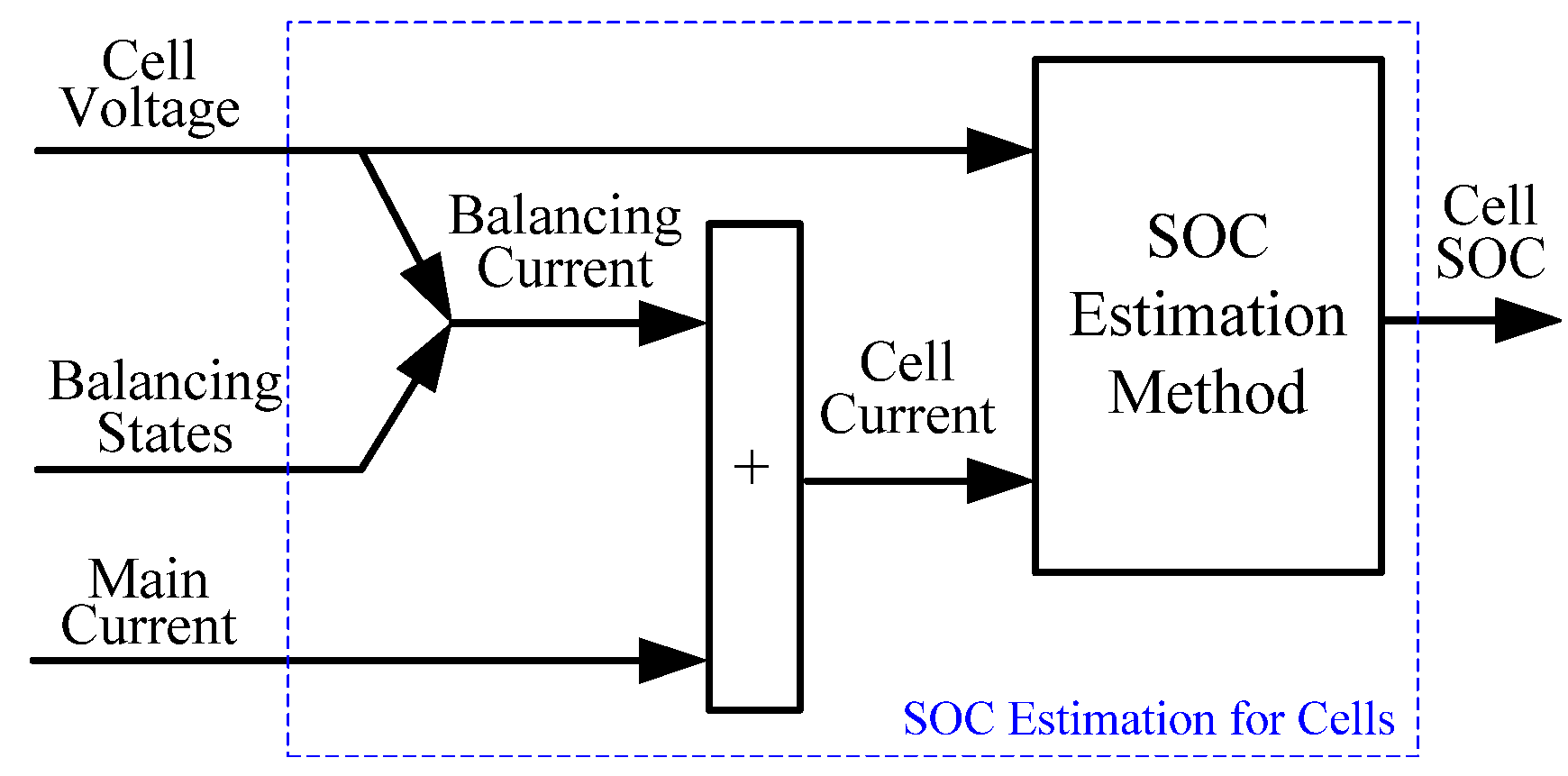
3.2. Cell SOC Estimation Method

3.3. Discussions
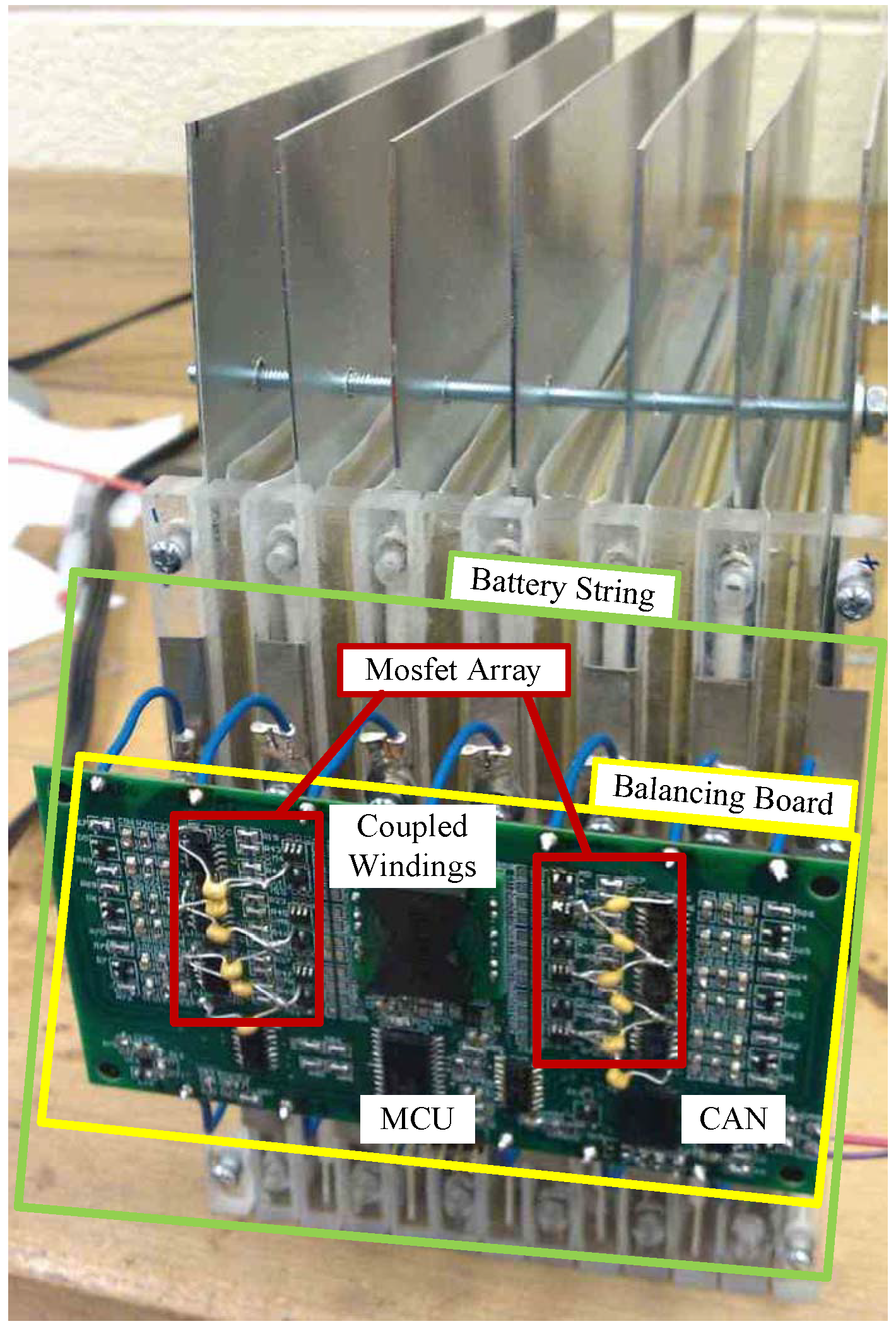
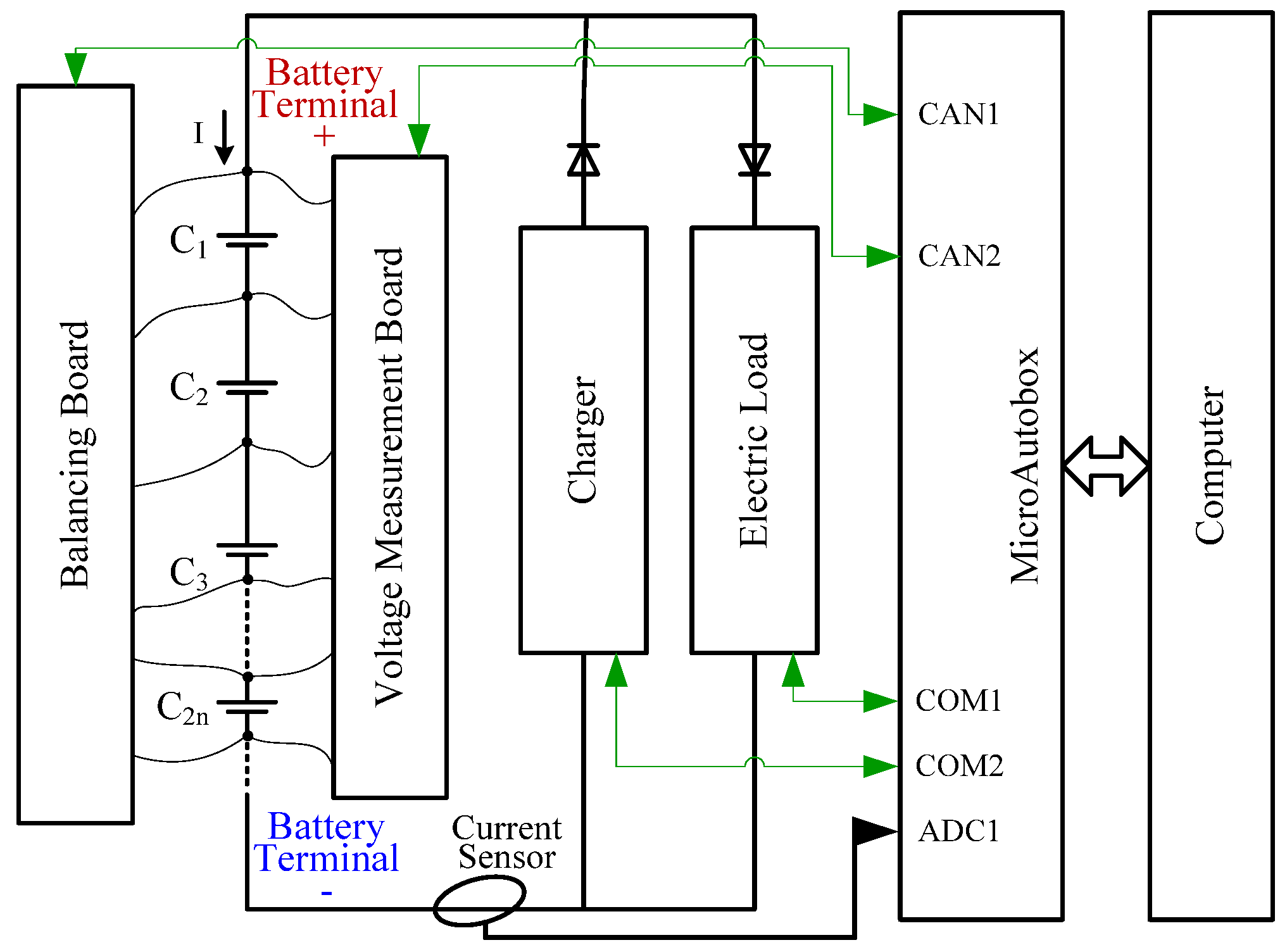
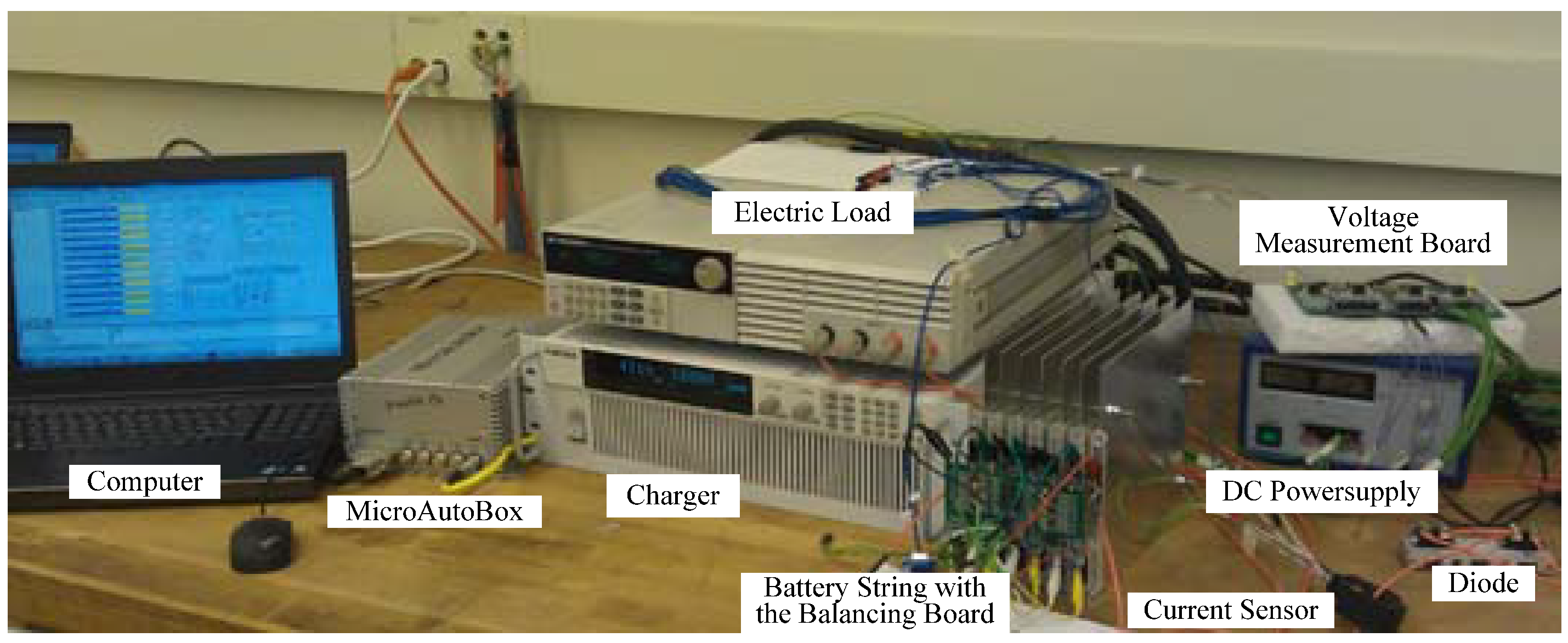
4. Experiments and Validation
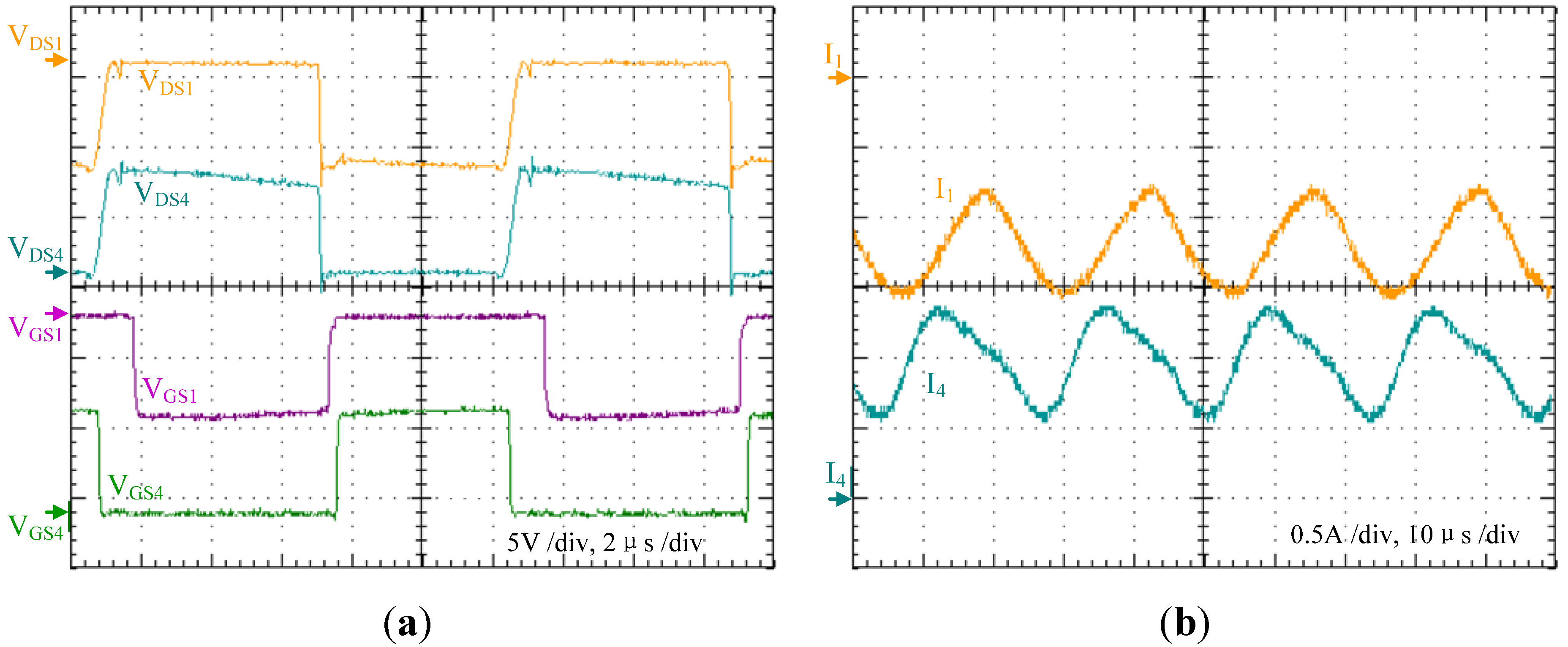
4.1. Circuit Simulation and Experimental Verification


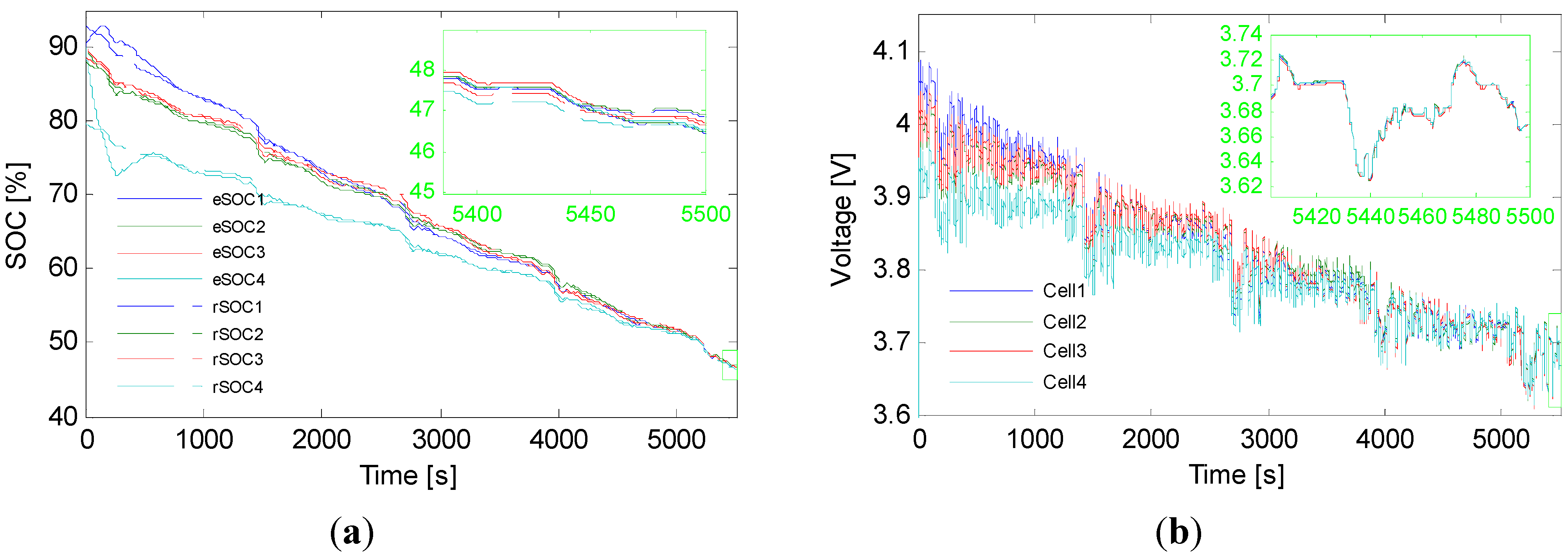
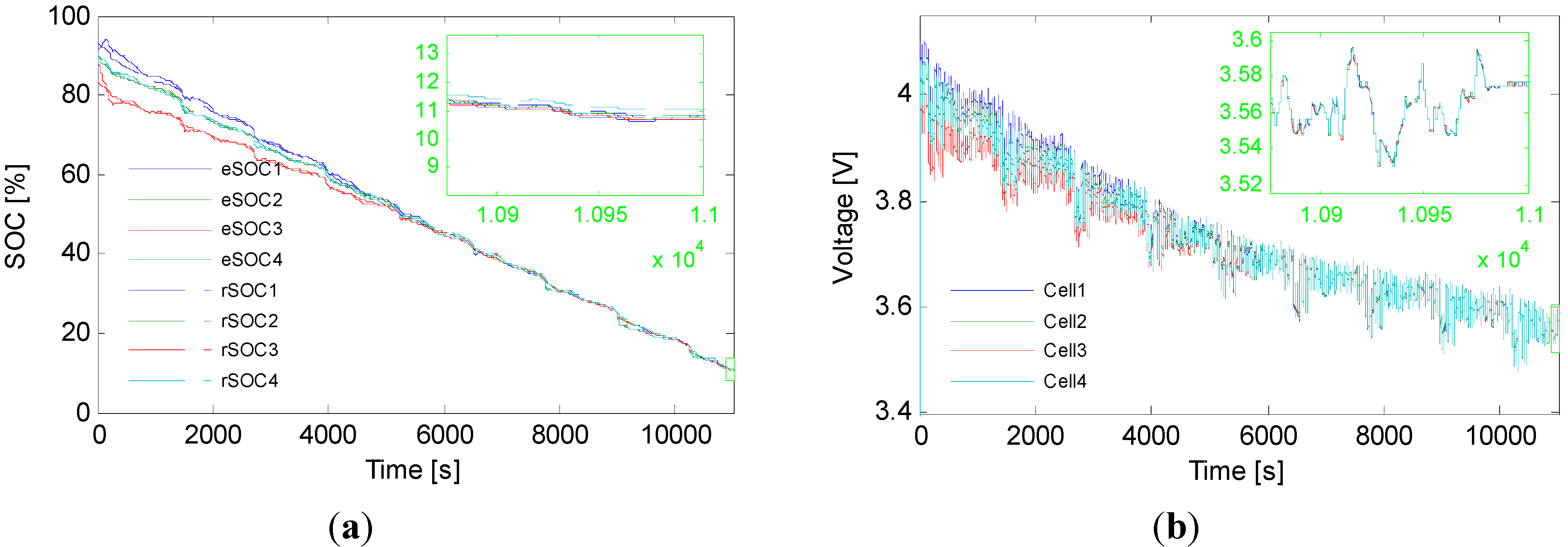
4.2. Validation of the Proposed SOC Based Balancing Strategy




4. Conclusions
Acknowledgments
References
- Baker, E.; Chon, H.; Keisler, J. Battery technology for electric and hybrid vehicles: Expert views about prospects for advancement. Technol. Forecast. Soc. Chang. 2010, 77, 1139–1146. [Google Scholar]
- Divya, K.C.; Østergaard, J. Battery energy storage technology for power systems—An overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]
- Lee, Y.S.; Cheng, M.W. Intelligent control battery equalization for series connected lithium-ion battery strings. IEEE Trans. Ind. Electron. 2005, 52, 1297–1307. [Google Scholar] [CrossRef]
- Lee, Y.S.; Cheng, G.T. Quasi-resonant zero-current-switching bidirectional converter for battery equalization applications. IEEE Trans. Power Electron. 2006, 21, 1213–1224. [Google Scholar] [CrossRef]
- Tolbert, L.A.; Peng, F.Z.; Cunnyngham, T.; Chiasson, J.N. Charge balance control schemes for cascade multilevel converter in hybrid electric vehicles. IEEE Trans. Ind. Electron 2002, 49, 1058–1064. [Google Scholar] [CrossRef]
- Maharjan, L.; Inoue, S.; Akagi, H.; Asakura, J. State-of-charge (soc)-balancing control of a battery energy storage system based on a cascade PWM converter. IEEE Trans. Power Electron. 2009, 24, 1628–1636. [Google Scholar] [CrossRef]
- Park, H.S.; Kim, C.E.; Kim, C.H.; Moon, G.W.; Lee, J.H. A modularized charge equalizer for an HEV lithium-ion battery string. IEEE Trans. Ind. Electron. 2009, 56, 1464–1476. [Google Scholar] [CrossRef]
- Baughman, A.C.; Ferdowsi, M. Double-tiered switched-capacitor battery charge equalization technique. IEEE Trans. Ind. Electron. 2008, 55, 2277–2285. [Google Scholar] [CrossRef]
- Nishijima, K.; Sakamoto, H.; Harada, K. A PWM Controlled Simple and High Performance Battery Balancing System. In Proceedings of Power Electronics Specialists Conference, Galway, Ireland, 18–23 June 2000; pp. 517–520.
- Xu, A.G.; Xie, S.J.; Liu, X.B. Dynamic voltage equalization for series-connected ultracapacitors in Ev/Hev applications. IEEE Trans. Veh. Technol. 2009, 58, 3981–3987. [Google Scholar] [CrossRef]
- Kutkut, N.H. A Modular Nondissipative Current Diverter for EV Battery Charge Equalization. In Proceedings of Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 15–19 February 1998; pp. 686–690.
- Karnjanapiboon, C.; Jirasereeamornkul, K.; Monyakul, V. High Efficiency Battery Management System for Serially Connected Battery String. In Proceedings of IEEE International Symposium on Industrial Electronics, Seoul, Korea, 5–8 July 2009; pp. 1504–1509.
- Einhorn, M.; Guertlschmid, W.; Blochberger, T.; Kumpusch, R.; Permann, R.; Conte, F.; Kral, C.; Fleig, J. A current equalization method for serially connected battery cells using a single power converter for each cell. IEEE Trans. Veh. Technol. 2011, 60, 4227–4237. [Google Scholar] [CrossRef]
- Wei, X.Z.; Zhu, B. The research of vehicle power Li-ion battery pack balancing method. In Proceedings of The 9th International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; pp. 498–502.
- Einhorn, M.; Roessler, W.; Fleig, J. Improved performance of serially connected Li-ion batteries with active cell balancing in electric vehicles. IEEE Trans. Veh. Technol. 2011, 60, 2448–2457. [Google Scholar] [CrossRef]
- Wei, X.Z.; Zhao, X.P.; Dai, H.F. The Application of Flyback DC/DC Converter in Li-Ion Batteries Active Balancing. In Proceedings of Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009; pp. 1654–1656.
- Kutkut, N.H.; Divan, D.M. Dynamic Equalization Techniques for Series Battery Stacks. In Proceedings of 18th International Telecommunications Energy Conference, Boston, MA, USA, 6–10 October 1996; pp. 514–521.
- Zhang, X.; Liu, P.; Wang, D. The design and implementation of smart battery management system balance technology. J. Converg. Inf. Technol. 2011, 6, 108–116. [Google Scholar]
- Ye, Y.; Cheng, K.W.E.; Yeung, Y.P.B. Zero-current switching switched-capacitor zero-voltage-gap automatic equalization system for series battery string. IEEE Trans. Power Electron. 2012, 27, 3234–3242. [Google Scholar] [CrossRef]
- Xu, J.; Mi, C.C.; Cao, B.; Cao, J. A new method to estimate the state of charge of lithium-ion batteries based on the battery impedance model. J. Power Sources 2013, 233, 277–284. [Google Scholar] [CrossRef]
- Li, J.; Barillas, J.K.; Guenther, C.; Danzer, M.A. A comparative study of state of charge estimation algorithms for LiFePO4 batteries used in electric vehicles. J. Power Sources 2013, 230, 244–250. [Google Scholar] [CrossRef]
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1: Introduction and state estimation. J. Power Sources 2006, 161, 1356–1368. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Xu, J.; Mi, C.; Cao, B.; Deng, J.; Chen, Z.; Li, S. The state of charge estimation of lithium-ion batteries based on a proportional integral observer. IEEE Trans. Veh. Technol. 2013. submitted for publication. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Xu, J.; Li, S.; Mi, C.; Chen, Z.; Cao, B. SOC Based Battery Cell Balancing with a Novel Topology and Reduced Component Count. Energies 2013, 6, 2726-2740. https://0-doi-org.brum.beds.ac.uk/10.3390/en6062726
Xu J, Li S, Mi C, Chen Z, Cao B. SOC Based Battery Cell Balancing with a Novel Topology and Reduced Component Count. Energies. 2013; 6(6):2726-2740. https://0-doi-org.brum.beds.ac.uk/10.3390/en6062726
Chicago/Turabian StyleXu, Jun, Siqi Li, Chris Mi, Zheng Chen, and Binggang Cao. 2013. "SOC Based Battery Cell Balancing with a Novel Topology and Reduced Component Count" Energies 6, no. 6: 2726-2740. https://0-doi-org.brum.beds.ac.uk/10.3390/en6062726