
Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey


School of Electrical Engineering and Telecommunications, University of New South Wales, Sydney, NSW 2052, Australia
*
Author to whom correspondence should be addressed.
Future Internet 2021, 13(7), 174; https://0-doi-org.brum.beds.ac.uk/10.3390/fi13070174
Submission received: 20 May 2021
/
Revised: 26 June 2021
/
Accepted: 27 June 2021
/
Published: 2 July 2021
(This article belongs to the Special Issue Towards Convergence of Internet of Things and Cyber-Physical Systems)
Abstract
:As a typical cyber-physical system, networked unmanned aerial vehicles (UAVs) have received much attention in recent years. Emerging communication technologies and high-performance control methods enable networked UAVs to operate as aerial sensor networks to collect more complete and consistent information with significantly improved mobility and flexibility than traditional sensing platforms. One of the main applications of networked UAVs is surveillance and monitoring, which constitute essential components of a well-functioning public safety system and many industrial applications. Although the existing literature on surveillance and monitoring UAVs is extensive, a comprehensive survey on this topic is lacking. This article classifies publications on networked UAVs for surveillance and monitoring using the targets of interest and analyzes several typical problems on this topic, including the control, navigation, and deployment optimization of UAVs. The related research gaps and future directions are also presented.
1. Introduction
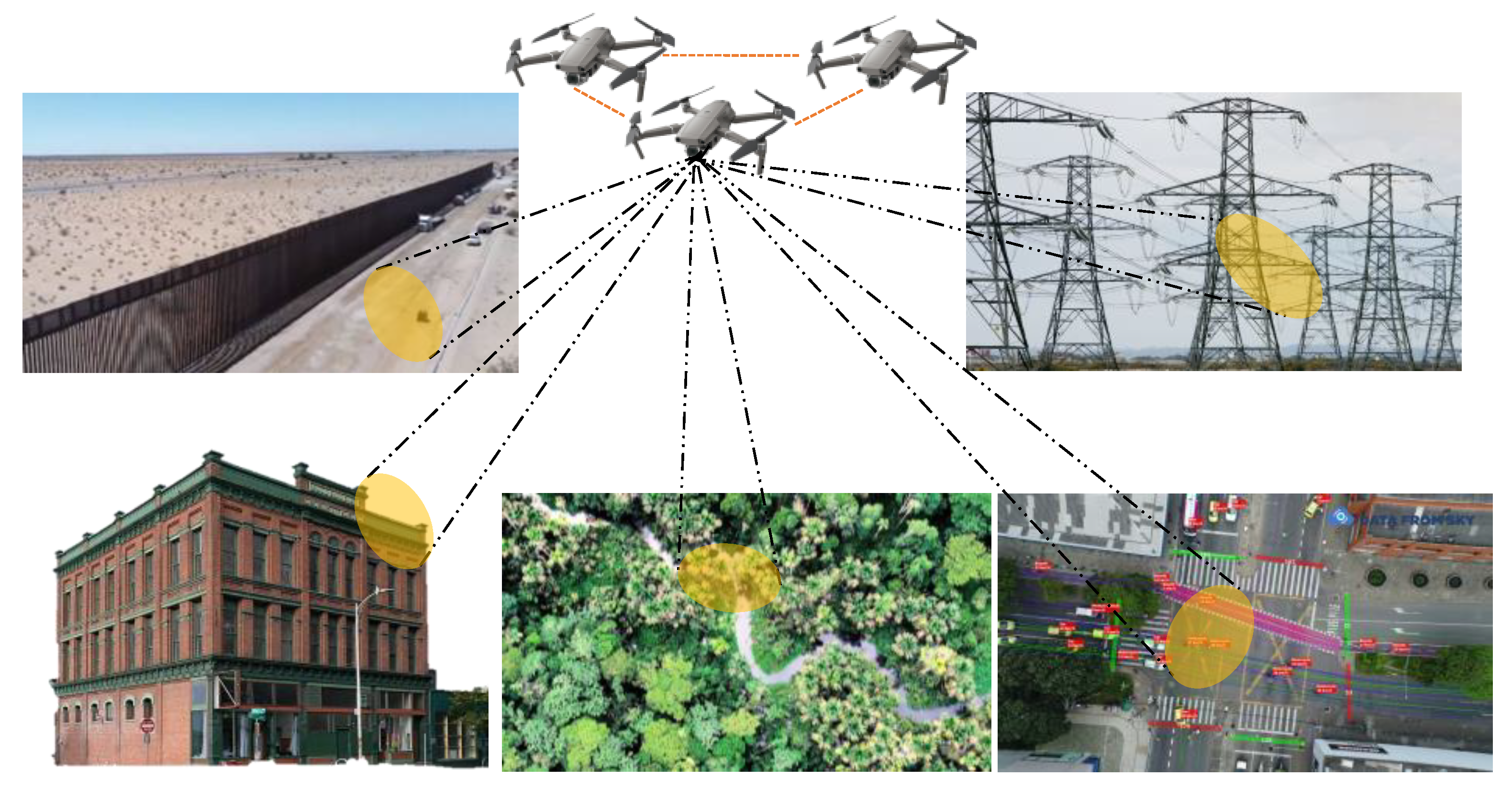
Surveillance involves the monitoring of a person, a group of people, behaviours, activities, infrastructure, or buildings to collect, influence, manage, or guide information. There are several different methods of surveillance, including camera observation, GPS tracking, radio surveillance, and biometric surveillance, among others. Typical surveillance tasks include border patrol, construction management, power grid inspection, traffic monitoring, environmental monitoring, etc. A typical surveillance environment could be large scale and scattered. It is difficult for traditional manual surveillance methods to efficiently locate and reach the locations of concern or faults in facilities.In addition, traditional surveillance is a labour-intensive task: many repetitive tasks in various work scenarios require much manpower, and the labour costs increase year-by-year. With the development of unmanned aerial vehicles (UAVs), computer vision, and sensor technology, UAV systems are becoming increasingly stable and mature in order to solve these difficult tasks at a lower cost and with higher security and reliability [1,2]. UAVs can quickly cover large and difficult-to-reach areas, reducing the labour costs, and they do not require much space for the operators [3]. They have become advanced tools to replace human labour in completing surveillance and in monitoring work efficiently and safely [4]. Figure 1 shows some typical UAV surveillance application scenarios.
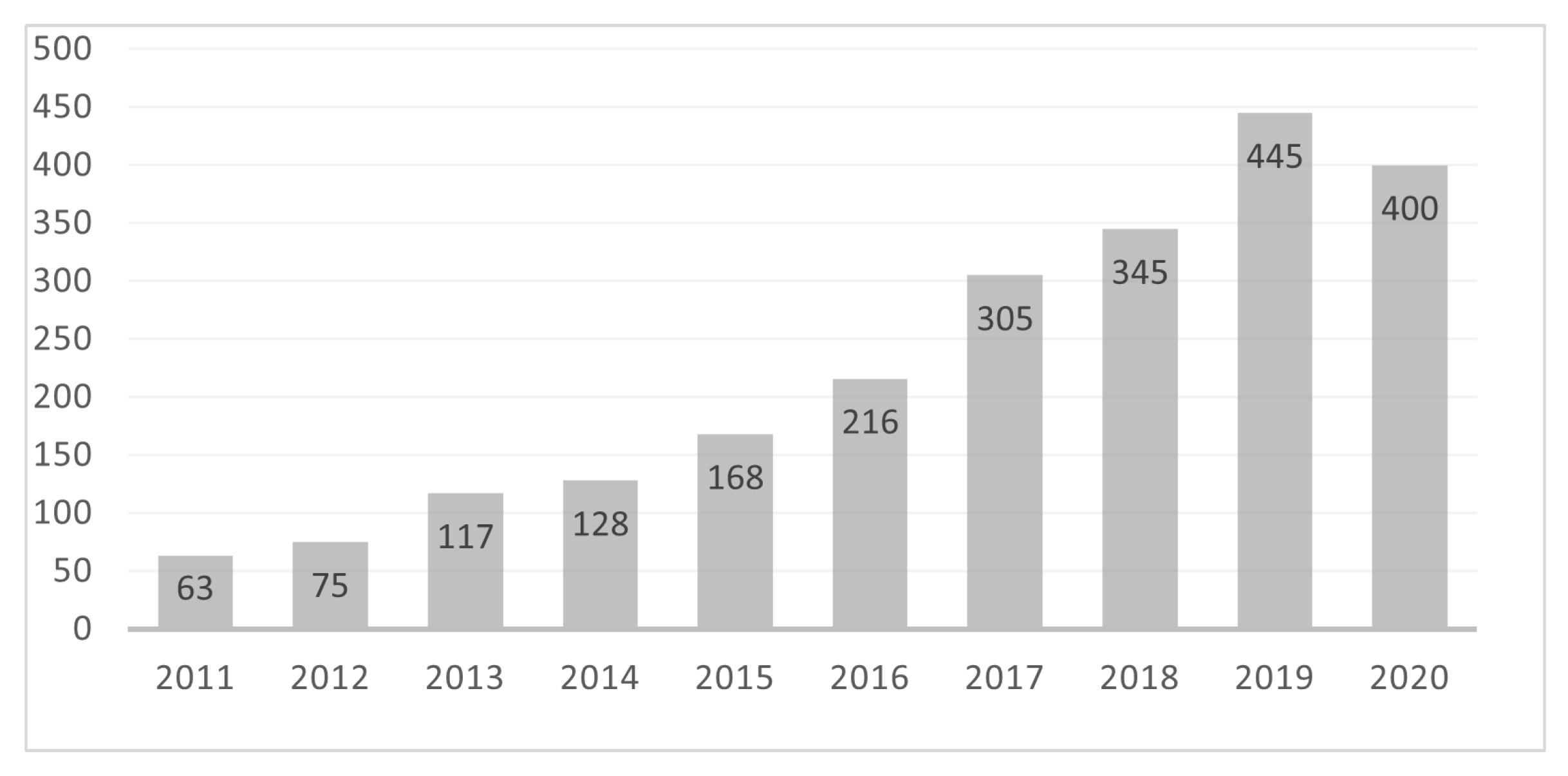
Using only one UAV for a specific mission may be risky because the UAV may encounter technical issues or other problems. In a reconfigurable or robust network of UAVs, if one UAV fails, the rest of the UAVs can still carry out the mission [5]. Generally, various tasks can be performed more efficiently by deploying a network of UAVs because they can collect more spatiotemporal data than a single UAV [6,7]. Moreover, networked UAVs allow system designers to equip different units in the network with different types of sensors, which in turn allows them to collect a wider range of data [8]. In addition, a flight formation using a combination of various types of UAVs of different sizes and configurations can be used to conduct complex tasks. As a type of sensor-based, communication-enabled autonomous system, networked surveillance UAVs can be considered a typical cyber-physical system. In recent years, networked UAVs have become one of the most important topics in UAV research [9]. In particular, a large and growing body of literature has investigated UAVs for surveillance and monitoring tasks and has presented a variety of technologies and methods. Performing a search using keywords such as “UAVs”, “Drones”, “Surveillance”, and “Monitoring” on the Web of Science Core Collection, we see that the research related to surveillance UAVs has increased rapidly since 2011, as indicated in Figure 2.
1.1. Motivation for This Review
Although the number of previous publications on surveillance and monitoring performed by UAVs is extensive, the existing surveys on this topic are not comprehensive. Some researchers reviewed works related to surveillance UAVs from different perspectives and for different applications, such as Uma et al. [10] on crop monitoring, Di et al. [11] on harmful algal blooms, Balmukund et al. [12] for search and rescue, and Francesco et al. [13] on railway surveillance. The existing surveys mostly focused on UAV hardware [10,13], related policies [10], and computer vision (image processing) [11,13]. In contrast, in this paper, we present a more comprehensive survey on this topic, with a particular focus on navigation and deployment optimization of UAVs. Furthermore, much attention has been paid to coordination among multiple UAVs.
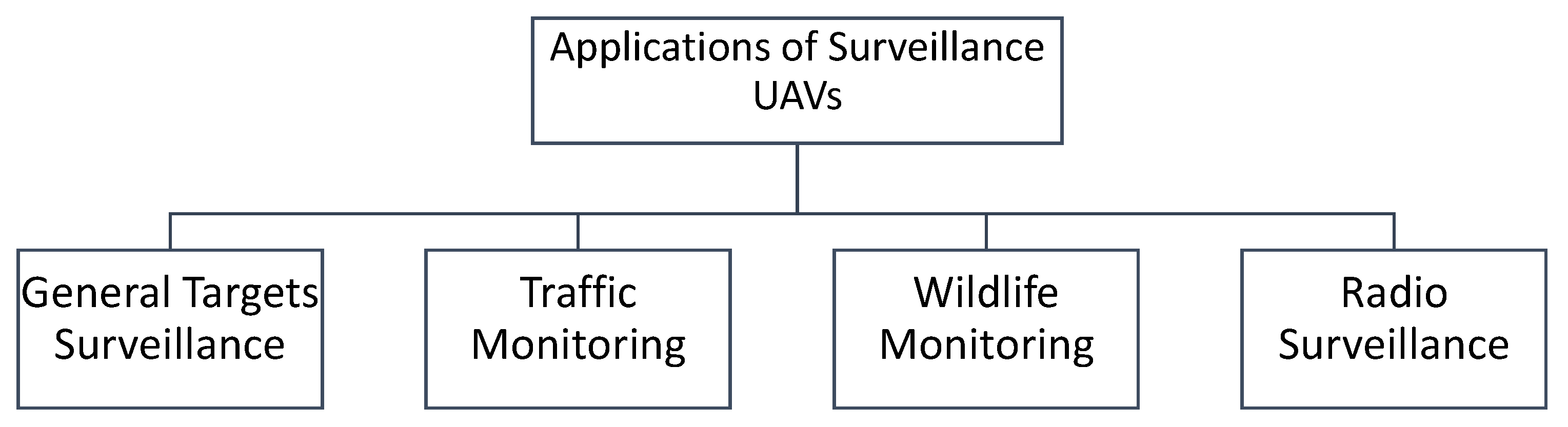
We selected some representative publications and classified them according to the target of interest. Networked unmanned aerial vehicles are used in numerous applications, and this research area is growing quickly. It is impossible to cover all of these applications in a relatively short survey article. Therefore, we concentrated only on four very important application areas. Specifically, we present a review on the use of UAVs for general target surveillance, traffic monitoring, wildlife monitoring, and radio surveillance, as shown in Figure 3. We also present the related research gaps and future directions. These four selected categories encompass the practical applications of UAVs that have been widely studied [14,15].
1.2. Paper Organization
The rest of the paper is organized as follows: Section 2 reviews approaches related to applications involving general target surveillance. In particular, this section focuses on common issues including navigation and deployment optimization in these applications. Section 3 presents a review on traffic-monitoring UAVs and follows a similar pattern. Section 4 reviews the literature on wildlife-monitoring UAVs, followed by the limitations of existing approaches and possible solutions. Section 5 introduces the publications on UAV base stations (UAV-BSs) for radio surveillance. Finally, Section 6 concludes the paper.
2. General Target Surveillance
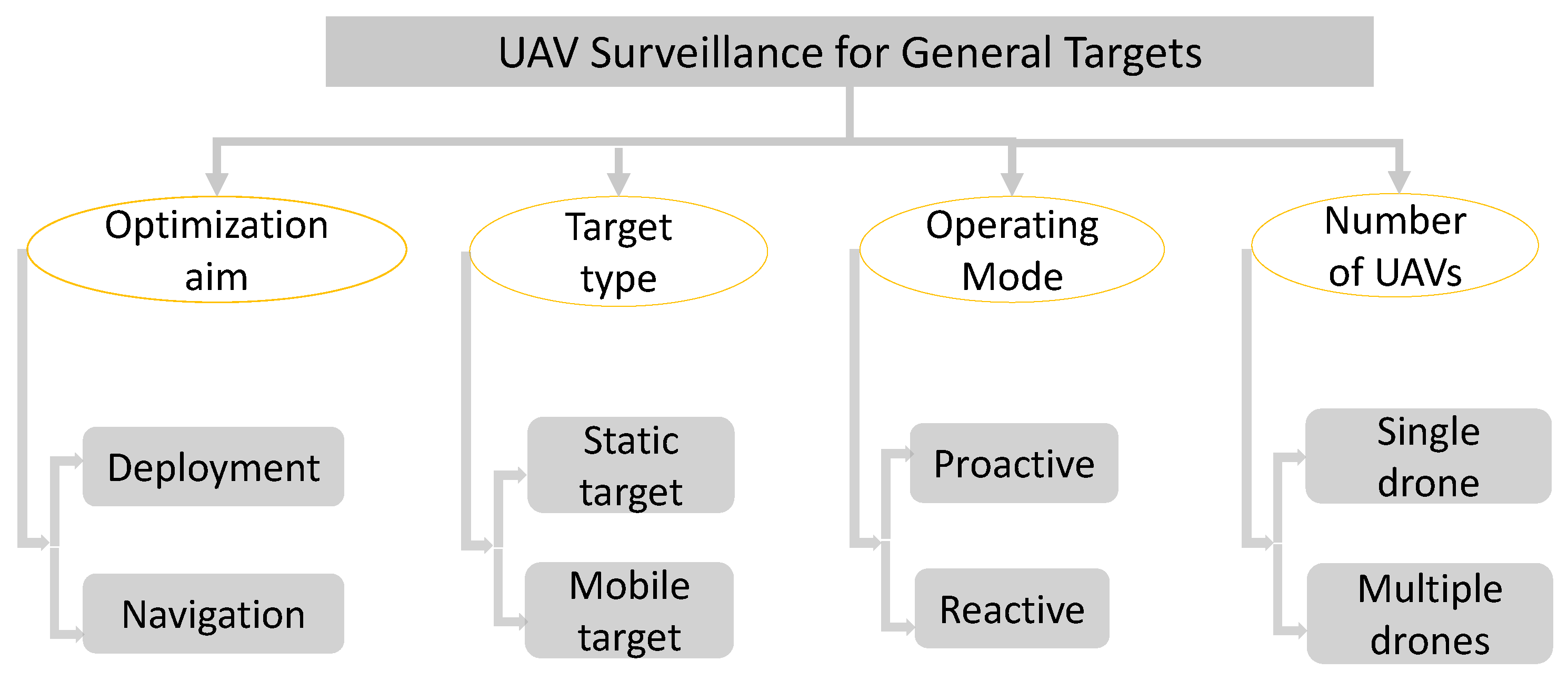
We can consider human beings and other objects in a certain area and even an area of interest to be general targets. The related approaches can be classified according to their optimization objective, target type, operating mode, and the number of UAVs; see Figure 4.
2.1. Optimization Objectives
From the optimization point of view, the literature on the deployment of surveillance UAVs can be divided into four categories according to the optimization objectives considered.

Minimizing UAV number: The authors of [16,17] studied the minimization of the number of UAVs for surveillance tasks. In detail, the authors of [17] investigated the deployment of a group of UAVs for surveillance and monitoring of a ground region, with the goal of minimizing the number of UAVs to observe every point of the region with ground-facing cameras. To solve this problem, the authors of [17] developed an easily implementable algorithm based on Kershner’s theorem from combinatorial geometry. The results are proven to be asymptotically optimal in the sense that the number of UAVs deployed is close to the minimum number of UAVs for large ground regions. Different from [17], the authors of [16] considered the scenario of monitoring a very uneven terrain. Specifically, UAVs are to be deployed over a very uneven terrain area with the goal of covering every point of the area. The authors in [16] viewed the problem as a UAV version of the 3D Art Gallery Problem. A computationally simple algorithm was proposed to calculate an upper estimate of the minimal number of UAVs necessary. The proposed algorithm also gives the locations of the UAVs. The limitation of [16] is that the considered terrain model are simple polyhedrons, while real uneven terrains can be much more complicated with many irregular structures. The authors of [18] formulated a set cover problem to find the 3D positions of UAVs, with the objective of minimizing the UAV number such that all of the sensor nodes monitored can operate without a time limitation.
Maximizing the number of covered targets: The authors of [19,20] provided some formulations for the deployment of a single UAV by assuming the availability of target locations. In particular, the authors of [19] presented an energy-efficient deployment approach for covering the largest number of targets. This approach first finds the vertical position of the UAV at an altitude, providing the maximal coverage, and then optimizes the UAV’s horizontal position to maximize the number of covered targets while minimizing the transmission power. To maximize the number of targets served, Reference [20] formulated a mixed-integer nonlinear problem involving both the horizontal coordinates and the altitude as variables rather than decoupling the deployment. The case of multiple UAVs has also been investigated under the assumption of that the locations of the targets are known [21]. UAVs are used to serve the greatest number of targets possible, provided that each UAV has a service capacity.
Maximizing the quality of coverage: Reference [22] focused on deploying a network of UAVs to surveil and monitor a set of static ground targets. To characterize the quality of coverage of targets using surveillance UAVs, the authors in [22] proposed a novel coverage model and further presented a reactive collision-free three-dimensional deployment algorithm to maximize the overall quality of coverage of targets by a group of surveillance UAVs. In particular, the proposed algorithm consisted of two control laws for horizontal submovement and vertical submovement of the UAVs in real-time. The authors analyzed the computational complexity and proved the convergence of the algorithm. The authors of [23] considered the deployment problem for a group of UAVs to maximize the quality of coverage of an area for surveillance. The authors proposed a distributed optimization model and coverage-maximizing algorithm to find the locations of the UAVs. The proposed optimization model considered the constraint that a connected communication graph needs to be maintained between the UAVs and some ground nodes. The proposed algorithm does not require global information and can converge to a local maximum within a finite number of steps. The authors conducted simulations with a real data set to demonstrate the effectiveness of their method. For high-quality surveillance of groups of moving pedestrians or vehicles on given paths with unknown speeds, the authors of [24] proposed a computationally simple algorithm to determine the deployment of multiple UAVs. The quality of coverage is calculated based on the distances between the UAVs and targets (the closer, the better). The proposed algorithm only requires local information, with minimal involvement of the central station. The authors proved the local optimality of the proposed algorithm.
Optimizing the energy efficiency: For the joint objectives considering energy consumption and the number of covered targets of surveillance UAVs, the authors of [25] designed a control system containing a movement decision-maker and proposed a decentralized algorithm to reactively determine a fleet of UAVs’ positions in 3D space that contributes more to the coverage. Their simulations indicated that the proposed method achieves better network lifetime and target coverage. The authors of [25] only considered targets on the ground and did not consider possible blockage caused by some high-rise buildings.
The authors of [26] studied the application of area-monitoring UAVs. The authors considered the problem of scheduling UAVs to perform either monitoring or recharge tasks so that the network lifetime is maximized given a set of UAVs and a charging depot on the ground.The energy-efficient deployment of a UAV for covering ground targets was discussed in Reference [27]. The power received from a UAV at a target is calculated as a function of the target’s horizontal distance from the UAV and the UAV’s altitude [27]. The optimal position in the horizontal and vertical dimensions was then decoupled in [27]. The horizontal position was determined using the centre of the smallest circle that covers the given set of targets, and the vertical position was determined using the least amount of transmitting power to cover that circle. Another recent paper [28] used a single UAV to cover a wireless sensor network. The main contributions here were scheduling a wake-up time for sensor nodes and planning the UAV’s trajectory so that the maximum energy consumption of sensor nodes is minimized rather than minimizing the UAV’s energy consumption.
2.2. Coordination of UAVs
The deployment and navigation of UAVs involve a number of hot research topics such as motion control [29,30], path planning [31,32], trajectory tracking [33], etc. We now introduce some representative work on navigation of the surveillance UAV. The problem of navigating surveillance UAVs to periodically monitor a set of moving targets was studied in [31,34]. Specifically, to periodically monitor a group of moving ground targets on the 3D terrain, the authors of [31] proposed a reactive sliding mode control algorithm to navigate a team of communicating surveillance UAVs with ground-facing video cameras. Particularly, the authors of [31] adopted a Voronoi partitioning technique to decrease the movement range of the UAVs and to reduce the revisit times of the targets. Reference [34] studied the navigation of a group of solar-powered UAVs for periodical monitoring of a set of scattered mobile ground targets in urban environments. In the considered scenario, the number of targets is larger than that of the UAVs, so that the UAVs need to carry out periodical surveillance. In addition, the authors considered the existence of tall buildings in urban environments, which may block the Line-of-Sight (LoS) between a UAV and a target. The tall buildings may also create some shadow region, so that the solar-powered UAV may not be able to harvest energy from the sun and the surveillance may become invalid. In [34], such a periodical surveillance problem is formulated as an optimization problem to minimize the target revisit time while considering the impact of the tall buildings. To solve this problem, the authors proposed an autonomous navigation algorithm based on rapidly exploring random tree (RRT) to guide the movements of the UAVs in real-time. To further narrow UAVs’ area in which they can move and to reduce the target revisit time, a partitioning scheme was also adopted to group targets. The limitation of [31,34] is that the considered targets are all assumed to move on some given trajectory. When these trajectories are unavailable, the accuracy of the target position predictions may significantly decrease and the UAVs may lose some targets. To solve this problem, some search operations can be adopted during the surveillance mission. In the problem of monitoring a moving disaster area using UAVs equipped with ground-facing cameras, the authors of [35] proposed a sliding-mode control algorithm that navigates the UAVs to monitor the faster-moving segment of the disaster area’s frontier. The authors in [35] proved that the proposed method tracks the fastest spreading parts of the frontier of the moving disaster area and converges to the global maximum in the optimization problem considered. The proposed method requires the initial positions of the UAVs to be near the frontier of the moving disaster area.
2.3. Research Gap and Future Directions
Different from the widely studied target tracking for surveillance, which requires a target to be within the field of view of a UAV, a few recent publications have investigated covert surveillance for security purposes [36,37], which aims at avoiding being noticed by the target. The authors of [38] studied the problem of navigating a UAV to carry out covert video surveillance on a single mobile target. It proposed a novel metric to characterize the disguising performance of a UAV with respect to a target. Based on this metric, the authors developed an online trajectory planning method with a balanced consideration of the energy efficiency, covertness, and manoeuvrability of the surveillance UAV. The authors in [38] first designed a new metric to quantify the covertness of the UAV. Specifically, the UAV disguises its intention by changing the relative UAV-target angle and distance as drastically and frequently as possible. Then, they formulated a multi-objective trajectory planning problem to maximize the disguising performance and to minimize the trajectory length of the UAV and presented a forward dynamic programming method to solve the problem. A similar study can be seen in [39], in which the authors proposed a bioinspired bearing-only navigation law for a video-surveillance UAV to covertly monitor a moving target. In particular, the proposed method is based on sliding mode and is inspired by motion camouflage stealth behaviour observed in some attacking animals. It can navigate the UAV to monitor a moving target while concealing its motion with respect to the target’s visual system. Moreover, the proposed navigation law is based on bearing-only measurements, i.e., directions from the UAV’s current position to the moving ground target. It does not require any information on the targets’ velocity and the distance to the target.
Clearly, covert surveillance by UAVs is relatively less investigated in the literature. The existing publications have only considered a single UAV. Moreover, experimental validation is lacking. Therefore, promising research directions include the investigation of multiple UAVs on covert surveillance and experiments to confirm the effectiveness.
3. Traffic Monitoring
With the increase in urban population and the rapid increase in the number of private vehicles, many roads have become more congested than ever. Road traffic monitoring plays a crucial role in traffic management. Currently, traffic monitoring mainly relies on static roadside units, which passively collect traffic information. Many traffic-monitoring devices can only capture traffic conditions at fixed and discrete locations. This results in many units being required to monitor a road segment [40]. Instead of deploying static roadside units, UAVs can be temporarily deployed during some particular time along with certain road segments. Undoubtedly, this is promising to reduce the installation cost. More importantly, since UAVs have a high probability of obtaining LoS with ground vehicles, they are more likely to achieve a better quality of monitoring than conventional roadside units. For traffic monitoring, two directions have been widely investigated in the research community. The first one focuses on traffic information processing, and the second one is about the control and collaboration of a UAV network. Figure 5 shows an example illustrating traffic-monitoring UAVs.
3.1. UAV Video-Processing Techniques
Regarding traffic information processing, some research focuses on processing the videos taken by UAVs when they hover at some fixed positions for purposes of road detection [41,42], vehicle detection and tracking [43,44], and traffic-parameter extraction [45,46]. In particular, the convolutional neural network (CNN) has been used to estimate traffic parameters from videos captured by a UAV [47], and Reference [48] investigated vehicle speed estimation based on two consecutive frames of a UAV’s video. Though these approaches achieve good performance, they are only suitable for the case where the UAV can maintain its attitude. When there is some disturbance such as wind gust, the aforementioned methods may not perform well. To this end, researchers have studied the ego-motion issue, which may be generated by an intentional effect from a remote pilot or an external factor such as wind. Two main approaches have been seen in the literature. The first one is an intuitive method called image registration, which targets turning the moving background into a fixed background [49,50]. Then, many traditional methods on background subtraction can be applied. The second one is the optical flow-based ego-motion estimation [51,52]. Optical flow is an effective method to extract motion patterns from videos, and it is often combined with unsupervised learning to estimate the UAV ego-motion. We refer readers to recent surveys for more information about video-processing techniques [53,54].
3.2. Coordination of UAVs
With the sensing techniques in hand, another issue that practitioners are often concerned about is the motion control of a single UAV and the coordination of multiple UAVs. The authors of [55] investigated the path-planning problem for a single UAV. The UAV is used to survey a given set of road segments, and the authors developed a real-time routing method by considering the time-varying traffic-monitoring demand. Still focusing on road patrolling, the authors of [56] paid attention to the scheduling problem of multiple UAVs, and the charging issue has been accounted for in the formulated model. Moreover, in the context of multiple UAVs, Reference [57] formulated a multi-objective optimization problem for a group of UAVs to patrol some road segments. The overall flight distance of the UAVs, the number of UAVs, and the satisfaction level of customers were jointly optimized. The authors of [58] proposed a decentralized autonomous navigation algorithm for the surveillance UAV to detect traffic blockage and to then effectively gather to the blocked area and monitor the majority of targets. The proposed algorithm consists of stages: initial, searching, accumulating, and monitoring. The UAVs only need to share measured information and their positions with their neighbours. A limitation of [58] is that the proposed navigation laws are for a planar motion only, and 3D mobility of the UAVs was not utilized. Another study on road-traffic monitoring by UAVs can be seen in [59], in which the authors proposed a distributed navigation algorithm based on Voronoi partition for a UAV network to maximize the quality of surveillance of a group of targets moving along a curvy road with unknown time-varying speeds. The convergence of the UAVs positions to the local optimal locations was also proved in [59], but the global optimality was not guaranteed.
3.3. Research Gap and Future Directions
Although there is a good number of publications discussing the solutions to traffic monitoring by UAVs, there are still some interesting directions to investigate. For the sensing technique, the available methods often work well in good environmental conditions but do not perform well enough in conditions with weak light and on foggy days. Thus, developing sensing techniques to overcome the influence of environmental factors would greatly promote the usage of UAVs in traffic monitoring. For the control and coordination of UAVs, existing publications mainly focus on the 2D scenario, i.e., the UAVs fly on a certain plane. Though this helps simplify the method design, it does not fully exploit the 3D mobility of UAVs. Therefore, developing approaches for 3D movement with the consideration of fundamental sensing techniques is also an interesting research direction.
4. Wildlife Monitoring UAVs
Wildlife living conditions are deteriorating as a result of global climate change. To protect endangered wildlife and to design better wildlife management strategies, policy-makers and ecologists rely on wildlife monitoring to acquire the necessary information on the health of wildlife populations and ecosystems [60]. The inability to reach wildlife habitats due to complex terrains is a major problem in wildlife monitoring. With superior manoeuvrability and flexible operations, UAVs can help solve these problems. In particular, UAV technology has opened up new ways to monitor wild animals, such as counting animal groups and determining gender using visible or thermal imaging [61]. With their ability to accurately estimate wild animal numbers and distribution at previously inaccessible areas and spatial resolutions, UAVs have the potential to revolutionize ecological research paradigms. In addition, UAV monitoring can provide important ecological insights by providing a wide aerial viewpoint that allows for a clear view of the animals’ interactions with their surroundings.
An increasing number of countries and organizations have adopted UAVs to conduct observations of wildlife in hard-to-reach places. From monitoring sandhill cranes in Colorado and counting waterbirds in Florida to investigating orangutan dens in Indonesia and seals in Arctic waters, UAVs fly at safe distances, protecting endangered wildlife and enabling environmentalists to work more safely, accurately, and economically. A summary of the existing publications on UAVs for wildlife monitoring can be seen in Table 1. The examples of wildlife-monitoring UAVs for protecting whales, koalas and elephants are as shown in Figure 6. We now introduce some of the representative works on UAVs for wildlife monitoring.
For marine biology, the ’SnotBot’ project [62] uses a modified DJI Inspire 2 UAV to conduct whale research. In particular, SnotBot collects blowing samples of whales as they surface and exhale. The collected blow samples contain the whale’s DNA, microbial communities, tissue particles, stress and pregnancy hormones, and viruses, all of which are important indicators of the whale’s health. In addition to being a non-lethal and non-invasive approach to ocean research, protective UAVs such as SnotBot are also democratizing opportunities for ocean research. Whale research has long been confined to a privileged few because the chartering of expensive marine ships and equipment requires serious financial support. However, now, UAVs in oceanography are making data collection affordable, replicable, and scalable for researchers everywhere.
In 2019–2020, an unprecedented bushfire swept more than 12.6 million hectares of land across Australia and caused the death of more than 61,000 koalas (one of the iconic marsupials in Australia). Sadly, even before the bushfire crisis, koalas were considered vulnerable to extinction due to threats posed by hunting, land development, food degradation, drought, and disease. After the bushfires, finding surviving koalas in burned and unburned areas became an urgent problem. To solve this problem, Australian ecologists presented an infield protocol for wild koala surveillance UAVs, which provides real-time validation of high-resolution thermal signatures of koalas [76]. The authors also provided detectability considerations relative to wildlife–UAV interactions, temperature, survey time, and detection of non-target species, which can be used to further inform UAV survey protocols. Once a koala is located, a hyperzoom vision camera on the same UAV helps first responders determine whether they need medical help. Mapping wildlife using thermal UAVs is much cheaper and more efficient than using traditional survey methods because koalas have strong camouflage abilities and are hard to be spotted. Moreover, thermal imaging UAVs have also become a powerful tool in the areas of fire protection. From detecting invisible hot spots and preventing secondary fires to collecting wildfire data at night, thermal imaging UAVs have become an important technology to improve the safety of firefighters and civilians.
Elephants are important ecosystem engineers, helping to maintain the biodiversity of forests and grasslands. However, despite the international ban on ivory trade, 20,000 to 40,000 elephants die from poaching each year. The situation is so bad that African elephants, previously classified as “vulnerable” by the International Union for Conservation of Nature (IUCN), were promoted to the “endangered” list last month because studies have shown that the number of African forest elephants has declined in the past three decades by more than 86%. Conservation efforts to protect elephants are challenging due to their vast habitat range [84]. To combat the elephant-poaching problem, anti-poaching UAVs have been used by conservation organization and researchers [85]. With thermal imaging anti-poaching UAVs, poachers can be found both during the day and at night. Besides anti-poaching, UAVs can record and forward real-time videos to ground teams that are usually miles away, and they can even record videos for later analysis.
All wildlife-monitoring results are shared with rangers and police. The use of anti-poaching UAVs has had a profound effect on detecting and stopping poachers [84]. Particularly, the authors in [84] proposed methods for identifying spatial distribution patterns of elephant-poaching incidents based on point pattern analyses in the Tsavo National Parks area in Kenya. The geospatial analyses on the physical environment were performed to create a risk map based on how land cover, water features, and roads correlate to poaching incidents. The UAV flight paths were also modelled based on UAVs flight characteristics and the horizontal view angle for a selected thermal camera. The authors in [84] found that poaching incidents were geographically clustered and followed a predictive (deterministic) process and were dominantly close to roads and water features. They conclude that a combination of GIS-based risk analysis and aerial surveillance enable conservation teams to improve the efficiency of their anti-poaching efforts with limited budgets.
Research Gap and Future Directions
However, the use of UAVs raises biological and ethical concerns. When UAVs are used to monitor wild animals, one of the biggest issues is the resulting disturbances to the animals. Recent studies [86,87,88] have revealed that UAVs can cause significant interference to certain species, and many animals react negatively to the presence of UAVs in ecological field research. Unmanned aircraft systems have become a new source of disturbance for wild animals, according to a recent systematic literature review [89]. For instance, studies have shown that UAVs have negative impacts on various bird species [86]. Birds’ typical negative reactions to UAVs include panic, delayed return times to the nest, and nest abandonment [90]. The impact of UAVs on terrestrial animals has also been studied. Ditmer [87] found that, when UAVs flew overhead, black bears had consistently strong physiological responses, such as raised heart rates. Bennitt [88] deployed two UAVs to approach different species of terrestrial mammalian wild animals (e.g., elephant, giraffe, zebra, etc.). The findings show that UAVs can elicit behavioural responses in a wide range of species. As a result, the authors concluded that strict regulations on the use of UAVs in wildlife areas are required to reduce disturbance.
To solve this problem, a study by Jarrod [91] proposed the best practice for minimizing UAV disturbance to wildlife in biological field research. They emphasized that minimum wildlife disturbance flight practices need to be exercised and that UAV trajectories that are potentially threatening should be avoided. There are growing appeals for researchers to develop effective strategies to safely apply UAVs to monitor wild animals to minimize the negative impacts [92,93]. The research to date has only proposed some basic disturbance-reducing solutions such as increasing the UAVs’ altitude or keeping a maximum useful distance to reduce disturbance [93,94]. However, other than these, more specific methods for UAVs to perform covert monitoring of wildlife are still under investigation.
Wildlife monitoring by UAVs can be broadly divided into two categories based on the mission types. The first typically involves flying over the animals to monitor the distribution of animals in a given area [92], referred to as “overflight”. The second category is usually called “close-up” to closely inspect or observe a single animal or a small group of animals whose locations are known ahead of the launch. In general, close-up monitoring tends to induce stronger disturbance to subject animals. Several studies have emphasized that great caution should always be exercised when conducting close-up animal monitoring [91,92]. To reduce the negative impact (disturbance) of wildlife-monitoring UAVs, a navigation control algorithm based on motion camouflage could be a possible solution.
Basic mechanism of motion camouflage: When a pursuer approaches a moving prey, the former chooses its path so that it stays on a straight line segment connecting the current position of the target and a fixed reference point); see Figure 7.
The target is unable to distinguish the moving pursuer from a stationary object because there is no optical flow on the target’s visual system when using motion camouflage. Even without any advantage in speed, this motion strategy allows a pursuer to successfully follow a target while concealing its motion [95]. Srinivasan [95] also shows how motion camouflage can be used to conceal objects in both homogeneous and structured environments. Although the concept of motion camouflage is simple, experiments show that it can fool even humans with our advanced visual system [96]. By designing guardians laws for wildlife-monitoring UAVs based on motion camouflage, the visual disturbance induced by UAVs to wild animals could possibly be reduced.
However, motion camouflage can not help reduce the noise disturbance of wildlife-monitoring UAVs. Particularly, wild animals can respond to both visual and auditory cues from UAVs in negative ways [89]. Studies show that, for animals in a noisy colony, any sign of discomfort can be attributed to visual rather than auditory contact with the UAVs [90] and vice versa for animals in ecosystems with little environmental noise [97]. There have been some commercialized quiet alternatives to standard UAVs. For example, DJI Mavic Pro claims to be 60% quieter than other models [98]. In addition, a Canadian company released the prototype of ultra-quiet UAV blades as their low-noise solution to multi-rotor UAVs, and field tests showed that their blades can achieve 10 dB average sound reduction [99,100]. A demonstration video can be seen at https://www.youtube.com/watch?v=1LNKL92kMKE, accessed on 1 July 2021. Adopting such UAVs to monitor animals can cause less noise disturbance.
5. Radio Surveillance by UAV-BSs
The deployment of unmanned aerial vehicles (UAVs) as UAV base stations (UAV-BSs) has been considered a feasible solution to surveil network users and to provide network coverage in scenarios where the conventional ground network is inaccessible or overloaded due to emergency events. Due to its mobility, fast deployment, and corporation, UAV-BSs can assist wireless communication networks in a variety of scenarios, such as serving users in severe shadow or interference conditions. For UAV-BSs, a fundamental research problem is its optimal deployment. An increasing number of publications have investigated the optimal deployment of UAV-BSs for improving network performance [20,101,102,103,104,105,106,107,108,109,110,111]. The search results from Web of Science Core Collection show that the research related to the deployment/placement of UAV-BSs has increased rapidly since 2015, as indicated in Figure 8. An example of UAV-BSs’ application scenario can be seen in Figure 9. We now present a brief review of some representative work on this topic.
References [101,102,103] investigated the problem of deploying UAV-BSs to serve mobile users based on a priori user distributions on a street graph. The authors assume that the user distributions represent traffic demand at a specific location in the city. The 3D deployment problem of UAV-BSs was formulated as a mixed-integer nonlinear problem (MINLP) in Reference [20], and the problem was solved using the interior-point optimizer of the MOSEK solver and bisection search. References [104,105] studied the UAV-BSs’ deployment problem without pre-known locations of users, in which a searching mechanism was adopted by the UAV-BSs to find the users. In addition to mobility, another major difference between a UAV-BS and a ground BS is that UAV-BSs rely on wireless connections for the backhaul links, whereas ground-BSs usually have fixed-wired backhaul links. Thus, one of the biggest challenges in the deployment of UAV-BSs is the availability of reliable wireless backhaul links. Existing literature has considered various aspects regarding UAV-BSs’ deployment for wireless coverage, but the backhaul limitations of UAV-BSs have not been treated in many details. The backhaul links of UAV-BSs may be dedicated, satellite-based, or in-band. Specifically, dedicated backhaul links could be mmWave link or free-space optical communication (FSO) between the core networks and the UAV-BSs. Satellite-based backhaul links require the UAV-BS to be equipped with a satellite transceiver for establishing the backhaul connections via satellites. As for in-band backhaul links, the main technique currently used for wireless backhaul links of LTE or WiFi is based on radio-frequency (RF) microwave [109]. Since the satellite transceiver is both energy-inefficient and expensive, the UAV-BSs with in-band or dedicated backhaul links are more practical.
Existing publications have investigated various aspects regarding UAV-BSs’ deployment for wireless coverage. For example, the authors of [19,27] studied the optimal deployment of UAV-BSs to achieve energy-efficient wireless coverage. The authors in [27] formulated a problem to minimize the average transmit power of a UAV-BS that serves a set of ground users with equal and non-equal transmit power to each user, respectively. Based on the decoupling method, the authors proposed an optimal UAV-BS placement algorithm when considering the equal transmit power to each user. For the non-equal transmit power case, the authors in [27] further proposed a UAV-BS placement algorithm by using the successive convex approximation (SCA) technique. Their simulation results verified the power savings of the proposed algorithms. The paper [19] proposed an optimal placement algorithm for multiple UAV-BSs that maximizes the number of covered users using the minimum transmit power. To simplify the UAV-BSs’ deployment problem, the authors in [19] decoupled the problem in the vertical and horizontal dimensions. They modelled the UAV-BS deployment in the horizontal dimension as a circle placement problem and the smallest enclosing circle problem. The simulations in [19] verified the transmission power savings and increased in the number of covered users as the user heterogeneity increases by applying the proposed method. To investigate the 3D deployment of a UAV-BS to maximize the number of covered users with different quality-of-service (QoS) requirements, the authors of [19] modelled the deployment problem as a multiple circles placement problem and proposed an exhaustive search (ES) algorithm over a 1D parameter in a closed region. In addition to the ES algorithm, the authors of [19] also proposed a maximal weighted area (MWA) algorithm to solve the placement problem, which is computationally efficient. To investigate the UAV-BS deployment for minimum-delay communications, the authors of [112] formulated a minimum-delay UAV-BS placement problem, subject to practical constraints imposed on the UAV-BS’ battery life and velocity. The authors in [112] transformed the primal problem to the corresponding constrained Markov decision process (CMDP) and provided a reinforcement learning-aided solution to the problems formulated under various assumptions concerning the wireless teletraffic dynamics. Reference [111] studied the placement optimization of multiple UAV-BSs, subject to minimizing the number of UAV-BSs to cover every user in the considered area. To this end, the authors in [111] proposed a polynomial-time algorithm with successive UAV-BSs placement, where the UAV-BSs are placed sequentially starting on the area perimeter of the uncovered users along a spiral path toward the centre, until all users are covered.
Previous studies recognized the key role played by the backhaul limitations while designing and deploying UAV-BSs [108,109,110]. The authors in [110] proposed a framework that utilizes the 3D mobility of the UAV-BSs as the major degree of freedom to find the optimal precoder design for the backhaul links, UAV-BSs’ 3D hovering locations, power allocations, and user-BS association by exhaustive search. Reference [108] studied the optimal 3D deployment of a UAV-BS over an urban environment with users that have various rate requirements, considering both the bandwidth of a UAV-BS and the wireless backhaul peak rate as the limiting factors. In particular, the authors of [108] adopted the exhaustive search and branch-and-bound method in a step size of 100 m to search for UAV-BS’s 3D location to maximize the total number of served users and sum-rates. Such as solution, however, has the same problem as in [110] in that the solutions are both inefficient and cannot guarantee accurately optimal results. In addition, these two methods simply assumed that the UAV-BSs are connected to remote ground-BSs, which is not practical for ignoring the backhaul links’ communication range constraint. The authors in [102] introduced the use of a robust extended Kalman filter to estimate users’ positions with the received signal strength indication (RSSI) and proposed a decentralized algorithm to find a locally optimal result to maximize UAV-BSs’ coverage while considering both the backhaul limitations and collision avoidance of UAV-BSs. However, the results may not be globally optimal. Reference [113] studied a joint placement, resource allocation, and user association problem for multiple UAV-BSs with constrained backhaul links. The authors first determined the best resource allocation schemes based on various fronthaul and backhaul conditions and then developed an efficient iterative algorithm to optimize user association and UAV-BSs placement simultaneously. Specifically, they developed a bipartite graph matching-based sub-process and dual-domain coordinated descent to identify an optimal user association with nearby UAV-BSs. The authors of [114] investigated the backhaul-aware trajectory optimization of fixed-wing UAV-BSs for continuous available long-time wireless service. In detail, the authors of [114] adopted convex optimization theory to derive optimal resource allocations for both in-band and out-band wireless backhaul schemes of UAV-BSs. The energy-efficient trajectories were obtained by the sequential convex optimization method. To solve the optimal 3D placement of UAV-BSs considering wireless backhaul limitation, autonomous coverage hole detection, and user demand, the authors of [115] took advantage of UAV-BSs’ mobility and Q-learning to autonomously detect coverage hole in a targeted area and to then deploy UAV-BSs by considering wireless backhaul limitation with user demand and the core network. Aimed at maximizing the number of associated users, the authors formulated an optimization problem for 3D placement of UAV-BSs at various angular positions and proposed a centralized solution to solve it.
Research Gap and Future Directions
Previous studies on UAV-BSs’ deployment problem often assumed that the accurate locations of network users are known a priori whereas the location of network users is often unavailable, especially in disaster areas. Since cellphones will continuously search for and automatically connect to available base stations nearby and UAV-BSs’ mobility enables triangulation of a user’s location, UAV-BSs have the potential to sense users’ locations by themselves. Thus, the research on UAV-BSs’ deployment based on automated sensing of users’ locations/distribution is has potential as a future direction. Specifically, UTDOA (Uplink Time Difference of Arrival) positioning is one of the dominating methods for locating cellular network users because of its high precision. Conventional UTDOA positioning is basically conducted through the following procedure [116,117]:

The signal transmission process of UTDOA positioning is as illustrated in Figure 10.
Note that conventional UTDOA positioning requires at least three BSs to locate the UEs. With UAV-BSs’ mobility, we think it is possible to conduct UTDOA positioning using a single UAV-BS through the following procedure:

An illustration of the signal transmission process of the proposed UTDOA using a flying UAV-BS can be seen in Figure 11.
6. Conclusions
In this paper, the applications of networked UAVs for surveillance and monitoring were investigated. Several typical problems across applications such as the navigation, deployment optimization, and coordination of UAVs were discussed. Specifically, we select some representative publications and classify them by targets of interest. In detail, we presented a review on the use of UAVs for general target surveillance, traffic monitoring, wildlife monitoring, and radio surveillance. The related research gap and future directions in the form of limitations of existing approaches and possible solutions are also discussed at the end of each main section. This paper mainly focused on some high-level topics of surveillance UAVs. Some other aspects that are related to surveillance UAVs, such as communication techniques between UAVs and low-level control techniques, are not covered.
We notice that most of the existing publications on surveillance by UAVs have not taken into account the noise produced by UAVs. They can make strong noise especially when they are close to the targets of interest. While such noise may not impact monitoring performance in certain scenarios such as using UAVs to monitor road traffic, it does make a strong influence in sound-sensitive applications such as the surveillance of wildlife animals and criminal suspects. As these types of targets may not behave as normal more once, they realize that some unfamiliar objects (e.g., UAVs) are around. Thus, developing low-noise UAVs would be a quite useful direction for future study. Additionally, there is still room for the development of highly autonomous UAVs. State-of-the-art UAVs are mainly trained for specific and well-structured environments. They are very likely to fail to operate in unstructured or new environments. From this sense, developing UAVs that are capable of learning and on-the-fly adaptation to environmental novelty is necessary and challenging [118,119]. Moreover, off-the-shelf UAV products, especially rotary-wing UAVs, are often restricted in operation time due to limitations in the payload. Therefore, the next generation of UAVs needs to be more energy-efficient than current systems and able to pursue complex goals in highly dynamic and even adversarial environments. Last but not least, as counter-UAV systems have been studied and developed [120,121], the development of smarter UAVs that can avoid detection and tracking by such a system is meaningful, especially in military surveillance applications.
Author Contributions
Conceptualization, X.L.; funding acquisition, A.V.S.; methodology, X.L. and A.V.S.; investigation, X.L.; project administration, A.V.S.; supervision, A.V.S.; writing—original draft preparation, X.L.; writing—review and editing, A.V.S. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Australian Research Council. In addition, this work received funding from the Australian Government via grant AUSMURIB000001 associated with ONR MURI grant N00014-19-1-2571.
Data Availability Statement
Not applicable.
Acknowledgments
Authors would like to thank the anonymous reviewers for their valuable comments and suggestions on this paper.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| UAV-BSs | Unmanned Aerial Vehicle Base Stations |
| MWA | Maximal Weighted Area |
| QoS | Quality-of-Service |
| SCA | Successive Convex Approximation |
| E-SMLC | Evolved Serving Mobile Location Center |
| UE | User Equipment |
| TOA | Time-of-Arrival |
| UTDOA | Uplink Time Difference of Arrival |
References
- Yue, X.; Liu, Y.; Wang, J.; Song, H.; Cao, H. Software Defined Radio and Wireless Acoustic Networking for Amateur Drone Surveillance. IEEE Commun. Mag. 2018, 56, 90–97. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Y.; Niu, S.; Song, H.; Jing, W.; Yuan, J. Blockchain enabled verification for cellular-connected unmanned aircraft system networking. Future Gener. Comput. Syst. 2021, 123, 233–244. [Google Scholar] [CrossRef]
- Khan, M.; Heurtefeux, K.; Mohamed, A.; Harras, K.A.; Hassan, M.M. Mobile target coverage and tracking on drone-be-gone UAV cyber-physical testbed. IEEE Syst. J. 2017, 12, 3485–3496. [Google Scholar] [CrossRef]
- Matveev, A.S.; Teimoori, H.; Savkin, A.V. A method for guidance and control of an autonomous vehicle in problems of border patrolling and obstacle avoidance. Automatica 2011, 47, 515–524. [Google Scholar] [CrossRef]
- Zhou, Y.; Rao, B.; Wang, W. UAV Swarm Intelligence: Recent Advances and Future Trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- Li, H.; Savkin, A.V. Wireless sensor network based navigation of micro flying robots in the industrial internet of things. IEEE Trans. Ind. Inform. 2018, 14, 3524–3533. [Google Scholar] [CrossRef]
- Zhang, X.; Ali, M. A Bean Optimization-Based Cooperation Method for Target Searching by Swarm UAVs in Unknown Environments. IEEE Access 2020, 8, 43850–43862. [Google Scholar] [CrossRef]
- Alcarria, R.; Bordel, B.; Manso, M.A.; Iturrioz, T.; Perez, M. Analyzing UAV-based remote sensing and WSN support for data fusion. In International Conference on Information Technology & Systems; Springer: Cham, Switzerland, 2018; pp. 756–766. [Google Scholar]
- Chen, W.; Liu, J.; Guo, H. Achieving Robust and Efficient Consensus for Large-Scale Drone Swarm. IEEE Trans. Veh. Technol. 2020. [Google Scholar] [CrossRef]
- Panday, U.S.; Pratihast, A.K.; Aryal, J.; Kayastha, R.B. A review on drone-based data solutions for cereal crops. Drones 2020, 4, 41. [Google Scholar] [CrossRef]
- Wu, D.; Li, R.; Zhang, F.; Liu, J. A review on drone-based harmful algae blooms monitoring. Environ. Monit. Assess. 2019, 191, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Mishra, B.; Garg, D.; Narang, P.; Mishra, V. Drone-surveillance for search and rescue in natural disaster. Comput. Commun. 2020, 156, 1–10. [Google Scholar] [CrossRef]
- Flammini, F.; Naddei, R.; Pragliola, C.; Smarra, G. Towards automated drone surveillance in railways: State-of-the-art and future directions. In International Conference on Advanced Concepts for Intelligent Vision Systems; Springer: Cham, Switzerland, 2016; pp. 336–348. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Chang. 2020, 153, 119293. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Proactive deployment of aerial drones for coverage over very uneven terrains: A version of the 3D art gallery problem. Sensors 2019, 19, 1438. [Google Scholar] [CrossRef] [Green Version]
- Savkin, A.V.; Huang, H. Asymptotically optimal deployment of drones for surveillance and monitoring. Sensors 2019, 19, 2068. [Google Scholar] [CrossRef] [Green Version]
- Zorbas, D.; Douligeris, C. Computing optimal drone positions to wirelessly recharge IoT devices. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 628–633. [Google Scholar]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Bor-Yaliniz, R.I.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3-D placement of an aerial base station in next generation cellular networks. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–5. [Google Scholar]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. Deployment of UAV-mounted access points according to spatial user locations in two-tier cellular networks. In Proceedings of the 2016 Wireless Days (WD), Toulouse, France, 23–25 March 2016; pp. 1–6. [Google Scholar]
- Huang, H.; Savkin, A.V. An Algorithm of Reactive Collision Free 3-D Deployment of Networked Unmanned Aerial Vehicles for Surveillance and Monitoring. IEEE Trans. Ind. Inform. 2019, 16, 132–140. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. A Method for Optimized Deployment of a Network of Surveillance Aerial Drones. IEEE Syst. J. 2019, 13, 4474–4477. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A. Navigating UAVs for Optimal Monitoring of Groups of Moving Pedestrians or Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 3891–3896. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Reactive 3D Deployment of A Flying Robotic Network for Surveillance of Mobile Targets. Comput. Netw. 2019, 161, 172–182. [Google Scholar] [CrossRef]
- Trotta, A.; Di Felice, M.; Montori, F.; Chowdhury, K.R.; Bononi, L. Joint coverage, connectivity, and charging strategies for distributed UAV networks. IEEE Trans. Robot. 2018, 34, 883–900. [Google Scholar] [CrossRef]
- Wang, L.; Hu, B.; Chen, S. Energy efficient placement of a drone base station for minimum required transmit power. IEEE Wirel. Commun. Lett. 2018, 9, 2010–2014. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.; Lv, C.; Hang, P.; Xing, Y. Towards Safe and Personalized Autonomous Driving: Decision-Making and Motion Control with DPF and CDT Techniques. IEEE/ASME Trans. Mechatron. 2021, 26, 611–620. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Fault tolerant sliding mode predictive control for uncertain steer-by-wire system. IEEE Trans. Cybern. 2017, 49, 261–272. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Li, X. Reactive Autonomous Navigation of UAVs for Dynamic Sensing Coverage of Mobile Ground Targets. Sensors 2020, 20, 3720. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Viable path planning for data collection robots in a sensing field with obstacles. Comput. Commun. 2017, 111, 84–96. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Sliding mode predictive tracking control for uncertain steer-by-wire system. Control Eng. Pract. 2019, 85, 194–205. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Energy-Efficient Autonomous Navigation of Solar-Powered UAVs for Surveillance of Mobile Ground Targets in Urban Environments. Energies 2020, 13, 5563. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Navigation of a network of aerial drones for monitoring a frontier of a moving environmental disaster area. IEEE Syst. J. 2020, 14, 4746–4749. [Google Scholar] [CrossRef]
- Wall, T.; Monahan, T. Surveillance and violence from afar: The politics of drones and liminal security-scapes. Theor. Criminol. 2011, 15, 239–254. [Google Scholar] [CrossRef]
- Gendron, A. The Ethics of Overhead Surveillance: Deploying UAVs in the National Airspace for Law Enforcement and Other Purposes. Int. J. Intell. Ethics 2011, 2, 19–44. [Google Scholar]
- Huang, H.; Savkin, A.V.; Ni, W. Online UAV Trajectory Planning for Covert Video Surveillance of Mobile Targets. IEEE Trans. Autom. Sci. Eng. 2021. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Bioinspired Bearing Only Motion Camouflage UAV Guidance for Covert Video Surveillance of a Moving Target. IEEE Syst. J. 2020, 1–4. [Google Scholar] [CrossRef]
- Tang, J.; Liu, F.; Zou, Y.; Zhang, W.; Wang, Y. An improved fuzzy neural network for traffic speed prediction considering periodic characteristic. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2340–2350. [Google Scholar] [CrossRef]
- Zhou, H.; Kong, H.; Wei, L.; Creighton, D.; Nahavandi, S. Efficient road detection and tracking for unmanned aerial vehicle. IEEE Trans. Intell. Transp. Syst. 2014, 16, 297–309. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Road detection from aerial imagery. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Guangzhou, China, 11–14 December 2012; pp. 3588–3593. [Google Scholar]
- Cheng, H.Y.; Weng, C.C.; Chen, Y.Y. Vehicle detection in aerial surveillance using dynamic Bayesian networks. IEEE Trans. Image Process. 2011, 21, 2152–2159. [Google Scholar] [CrossRef] [PubMed]
- Cao, X.; Wu, C.; Lan, J.; Yan, P.; Li, X. Vehicle detection and motion analysis in low-altitude airborne video under urban environment. IEEE Trans. Circuits Syst. Video Technol. 2011, 21, 1522–1533. [Google Scholar] [CrossRef]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Ruichek, Y.; Janssens, D.; Wets, G. Unmanned aerial vehicle-based traffic analysis: A case study to analyze traffic streams at urban roundabouts. Procedia Comput. Sci. 2018, 130, 636–643. [Google Scholar] [CrossRef]
- Wang, L.; Chen, F.; Yin, H. Detecting and tracking vehicles in traffic by unmanned aerial vehicles. Autom. Constr. 2016, 72, 294–308. [Google Scholar] [CrossRef]
- Zhao, X.; Dawson, D.; Sarasua, W.A.; Birchfield, S.T. Automated traffic surveillance system with aerial camera arrays imagery: Macroscopic data collection with vehicle tracking. J. Comput. Civ. Eng. 2017, 31, 04016072. [Google Scholar] [CrossRef]
- Yamazaki, F.; Liu, W.; Vu, T.T. Vehicle extraction and speed detection from digital aerial images. In Proceedings of the IGARSS 2008-2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 8–11 July 2008; Volume 3, p. III-1334. [Google Scholar]
- Angel, A.; Hickman, M.; Mirchandani, P.; Chandnani, D. Methods of analyzing traffic imagery collected from aerial platforms. IEEE Trans. Intell. Transp. Syst. 2003, 4, 99–107. [Google Scholar] [CrossRef]
- Shastry, A.C.; Schowengerdt, R.A. Airborne video registration and traffic-flow parameter estimation. IEEE Trans. Intell. Transp. Syst. 2005, 6, 391–405. [Google Scholar] [CrossRef]
- Cao, X.; Gao, C.; Lan, J.; Yuan, Y.; Yan, P. Ego motion guided particle filter for vehicle tracking in airborne videos. Neurocomputing 2014, 124, 168–177. [Google Scholar] [CrossRef]
- Ke, R.; Li, Z.; Kim, S.; Ash, J.; Cui, Z.; Wang, Y. Real-time bidirectional traffic flow parameter estimation from aerial videos. IEEE Trans. Intell. Transp. Syst. 2016, 18, 890–901. [Google Scholar] [CrossRef]
- Ramachandra, B.; Jones, M.; Vatsavai, R.R. A Survey of Single-Scene Video Anomaly Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020. [Google Scholar] [CrossRef] [PubMed]
- Yazdi, M.; Bouwmans, T. New trends on moving object detection in video images captured by a moving camera: A survey. Comput. Sci. Rev. 2018, 28, 157–177. [Google Scholar] [CrossRef]
- Liu, X.; Peng, Z.R.; Zhang, L.Y. Real-time UAV rerouting for traffic monitoring with decomposition based multi-objective optimization. J. Intell. Robot. Syst. 2019, 94, 491–501. [Google Scholar] [CrossRef]
- Cheng, L.; Zhong, L.; Tian, S.; Xing, J. Task assignment algorithm for road patrol by multiple UAVs with multiple bases and rechargeable endurance. IEEE Access 2019, 7, 144381–144397. [Google Scholar] [CrossRef]
- Guerriero, F.; Surace, R.; Loscri, V.; Natalizio, E. A multi-objective approach for unmanned aerial vehicle routing problem with soft time windows constraints. Appl. Math. Model. 2014, 38, 839–852. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Huang, C. Decentralised Autonomous Navigation of a UAV Network for Road Traffic Monitoring. IEEE Trans. Aerosp. Electron. Syst. 2021. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Navigation of a UAV Network for Optimal Surveillance of a Group of Ground Targets Moving along a Road. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Huang, J.; Chen, Y.; Huang, Y.; Lin, P.; Chen, Y.; Lin, Y.; Yen, S.; Huang, P.; Chen, L. Rapid Prototyping for Wildlife and Ecological Monitoring. IEEE Syst. J. 2010, 4, 198–209. [Google Scholar] [CrossRef]
- Schofield, G.; Katselidis, K.A.; Lilley, M.K.; Reina, R.D.; Hays, G.C. Detecting elusive aspects of wildlife ecology using drones: New insights on the mating dynamics and operational sex ratios of sea turtles. Funct. Ecol. 2017, 31, 2310–2319. [Google Scholar] [CrossRef]
- Keller, B.; Willke, T. SnotBot: A whale of a deep-learning project. IEEE Spectr. 2019, 56, 41–53. [Google Scholar] [CrossRef]
- Pirotta, V.; Smith, A.; Ostrowski, M.; Russell, D.; Jonsen, I.D.; Grech, A.; Harcourt, R. An economical custom-built drone for assessing whale health. Front. Mar. Sci. 2017, 4, 425. [Google Scholar] [CrossRef]
- Barasona, J.A.; Mulero-Pázmány, M.; Acevedo, P.; Negro, J.J.; Torres, M.J.; Gortázar, C.; Vicente, J. Unmanned aircraft systems for studying spatial abundance of ungulates: Relevance to spatial epidemiology. PLoS ONE 2014, 9, e115608. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Michez, A.; Piégay, H.; Lisein, J.; Claessens, H.; Lejeune, P. Classification of riparian forest species and health condition using multi-temporal and hyperspatial imagery from unmanned aerial system. Environ. Monit. Assess. 2016, 188, 146. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, J.; Henriques, R.; Alves, P.; Sousa-Silva, R.; Monteiro, A.T.; Lomba, Â.; Marcos, B.; Honrado, J. Evaluating an unmanned aerial vehicle-based approach for assessing habitat extent and condition in fine-scale early successional mountain mosaics. Appl. Veg. Sci. 2016, 19, 132–146. [Google Scholar] [CrossRef] [Green Version]
- Paneque-Gálvez, J.; McCall, M.K.; Napoletano, B.M.; Wich, S.A.; Koh, L.P. Small drones for community-based forest monitoring: An assessment of their feasibility and potential in tropical areas. Forests 2014, 5, 1481–1507. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Hu, J.; Lian, J.; Fan, Z.; Ouyang, X.; Ye, W. Seeing the forest from drones: Testing the potential of lightweight drones as a tool for long-term forest monitoring. Biol. Conserv. 2016, 198, 60–69. [Google Scholar] [CrossRef]
- Lubow, B.C.; Ransom, J.I. Practical bias correction in aerial surveys of large mammals: Validation of hybrid double-observer with sightability method against known abundance of feral horse (Equus caballus) populations. PLoS ONE 2016, 11, e0154902. [Google Scholar] [CrossRef] [PubMed]
- Cirino, E. Drones Help Find Massive Penguin Colonies Hiding in Plain Sight. Available online: https://deeply.thenewhumanitarian.org/oceans/articles/2018/03/05/drones-help-find-massive-penguin-colonies-hiding-in-plain-sight (accessed on 3 May 2021).
- Chrétien, L.P.; Théau, J.; Ménard, P. Visible and thermal infrared remote sensing for the detection of white-tailed deer using an unmanned aerial system. Wildl. Soc. Bull. 2016, 40, 181–191. [Google Scholar] [CrossRef]
- Wich, S.; Dellatore, D.; Houghton, M.; Ardi, R.; Koh, L.P. A preliminary assessment of using conservation drones for Sumatran orang-utan (Pongo abelii) distribution and density. J. Unmanned Veh. Syst. 2015, 4, 45–52. [Google Scholar] [CrossRef]
- Sweeney, K.L.; Helker, V.T.; Perryman, W.L.; LeRoi, D.J.; Fritz, L.W.; Gelatt, T.S.; Angliss, R.P. Flying beneath the clouds at the edge of the world: Using a hexacopter to supplement abundance surveys of Steller sea lions (Eumetopias jubatus) in Alaska. J. Unmanned Veh. Syst. 2015, 4, 70–81. [Google Scholar] [CrossRef] [Green Version]
- Sykora-Bodie, S.T.; Bezy, V.; Johnston, D.W.; Newton, E.; Lohmann, K.J. Quantifying nearshore sea turtle densities: Applications of unmanned aerial systems for population assessments. Sci. Rep. 2017, 7, 1–7. [Google Scholar]
- Kiszka, J.J.; Mourier, J.; Gastrich, K.; Heithaus, M.R. Using unmanned aerial vehicles (UAVs) to investigate shark and ray densities in a shallow coral lagoon. Mar. Ecol. Prog. Ser. 2016, 560, 237–242. [Google Scholar] [CrossRef]
- Beranek, C.T.; Roff, A.; Denholm, B.; Howell, L.G.; Witt, R.R. Trialling a real-time drone detection and validation protocol for the koala (Phascolarctos cinereus). Aust. Mammal. 2020. [Google Scholar] [CrossRef]
- Torres, L.G.; Nieukirk, S.L.; Lemos, L.; Chandler, T.E. Drone up! Quantifying whale behavior from a new perspective improves observational capacity. Front. Mar. Sci. 2018, 5, 319. [Google Scholar] [CrossRef] [Green Version]
- Evans, I.; Jones, T.H.; Pang, K.; Evans, M.N.; Saimin, S.; Goossens, B. Use of drone technology as a tool for behavioral research: A case study of crocodilian nesting. Herpetol. Conserv. Biol. 2015, 10, 90–98. [Google Scholar]
- Groves, P.A.; Alcorn, B.; Wiest, M.M.; Maselko, J.M.; Connor, W.P. Testing unmanned aircraft systems for salmon spawning surveys. Facets 2016, 1, 187–204. [Google Scholar] [CrossRef]
- Stark, D.J.; Vaughan, I.P.; Evans, L.J.; Kler, H.; Goossens, B. Combining drones and satellite tracking as an effective tool for informing policy change in riparian habitats: A proboscis monkey case study. Remote Sens. Ecol. Conserv. 2018, 4, 44–52. [Google Scholar] [CrossRef]
- Junda, J.; Greene, E.; Bird, D.M. Proper flight technique for using a small rotary-winged drone aircraft to safely, quickly, and accurately survey raptor nests. J. Unmanned Veh. Syst. 2015, 3, 222–236. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.G.; Yoo, S.H.; Kwon, O. Possibility of applying unmanned aerial vehicle (UAV) and mapping software for the monitoring of waterbirds and their habitats. J. Ecol. Environ. 2017, 41, 1–7. [Google Scholar] [CrossRef]
- Mulero-Pázmány, M.; Stolper, R.; Van Essen, L.; Negro, J.J.; Sassen, T. Remotely piloted aircraft systems as a rhinoceros anti-poaching tool in Africa. PLoS ONE 2014, 9, e83873. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shaffer, M.J.; Bishop, J.A. Predicting and preventing elephant poaching incidents through statistical analysis, GIS-based risk analysis, and aerial surveillance flight path modeling. Trop. Conserv. Sci. 2016, 9, 525–548. [Google Scholar] [CrossRef] [Green Version]
- Bondi, E.; Fang, F.; Hamilton, M.; Kar, D.; Dmello, D.; Choi, J.; Hannaford, R.; Iyer, A.; Joppa, L.; Tambe, M.; et al. Spot poachers in action: Augmenting conservation drones with automatic detection in near real time. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018; Volume 32. [Google Scholar]
- Barr, J.R.; Green, M.C.; DeMaso, S.J.; Hardy, T.B. Drone Surveys Do Not Increase Colony-wide Flight Behaviour at Waterbird Nesting Sites, But Sensitivity Varies Among Species. Sci. Rep. 2020, 10, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Ditmer, M.A.; Vincent, J.B.; Werden, L.K.; Tanner, J.C.; Laske, T.G.; Iaizzo, P.A.; Garshelis, D.L.; Fieberg, J.R. Bears show a physiological but limited behavioral response to unmanned aerial vehicles. Curr. Biol. 2015, 25, 2278–2283. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bennitt, E.; Bartlam-Brooks, H.L.; Hubel, T.Y.; Wilson, A.M. Terrestrial mammalian wildlife responses to Unmanned Aerial Systems approaches. Sci. Rep. 2019, 9, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Mulero-Pázmány, M.; Jenni-Eiermann, S.; Strebel, N.; Sattler, T.; Negro, J.J.; Tablado, Z. Unmanned aircraft systems as a new source of disturbance for wildlife: A systematic review. PLoS ONE 2017, 12, e0178448. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Irigoin-Lovera, C.; Luna, D.M.; Acosta, D.A.; Zavalaga, C.B. Response of colonial Peruvian guano birds to flying UAVs: Effects and feasibility for implementing new population monitoring methods. PeerJ 2019, 7, e8129. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hodgson, J.C.; Koh, L.P. Best practice for minimising unmanned aerial vehicle disturbance to wildlife in biological field research. Curr. Biol. 2016, 26, R404–R405. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chabot, D.; Bird, D.M. Wildlife research and management methods in the 21st century: Where do unmanned aircraft fit in? J. Unmanned Veh. Syst. 2015, 3, 137–155. [Google Scholar] [CrossRef] [Green Version]
- Vas, E.; Lescroël, A.; Duriez, O.; Boguszewski, G.; Grémillet, D. Approaching birds with drones: First experiments and ethical guidelines. Biol. Lett. 2015, 11, 20140754. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barnas, A.; Newman, R.; Felege, C.J.; Corcoran, M.P.; Hervey, S.D.; Stechmann, T.J.; Rockwell, R.F.; Ellis-Felege, S.N. Evaluating behavioral responses of nesting lesser snow geese to unmanned aircraft surveys. Ecol. Evol. 2018, 8, 1328–1338. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Srinivasan, M.V.; Davey, M. Strategies for active camouflage of motion. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1995, 259, 19–25. [Google Scholar]
- Anderson, A.J.; McOwan, P.W. Humans deceived by predatory stealth strategy camouflaging motion. Proc. R. Soc. Lond. Ser. B Biol. Sci. 2003, 270, S18–S20. [Google Scholar] [CrossRef] [Green Version]
- Schroeder, N.M.; Panebianco, A.; Gonzalez Musso, R.; Carmanchahi, P. An experimental approach to evaluate the potential of drones in terrestrial mammal research: A gregarious ungulate as a study model. R. Soc. Open Sci. 2020, 7, 191482. [Google Scholar] [CrossRef] [Green Version]
- Dronethusiast. What Are the Best Silent Drone Choices and What Applications Are They Good for. Available online: https://www.dronethusiast.com/what-are-the-best-silent-drone-choices-and-what-applications-are-they-good-for/ (accessed on 9 July 2020).
- Delson Aeronautics. Ultra-Quiet UAV Blades. Available online: https://delsonaero.com/uav-blades/ (accessed on 19 June 2020).
- Simmie, S. Canadian Company Releases Video of Its Low-Noise Drone Props. Available online: https://dronedj.com/2021/01/22/canadian-company-releases-video-of-its-low-noise-drone-props/ (accessed on 19 June 2020).
- Huang, H.; Savkin, A.V. An algorithm of efficient proactive placement of autonomous drones for maximum coverage in cellular networks. IEEE Wirel. Commun. Lett. 2018, 7, 994–997. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Deployment of unmanned aerial vehicle base stations for optimal quality of coverage. IEEE Wirel. Commun. Lett. 2019, 8, 321–324. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. A method for optimized deployment of unmanned aerial vehicles for maximum coverage and minimum interference in cellular networks. IEEE Trans. Ind. Inform. 2018, 15, 2638–2647. [Google Scholar] [CrossRef]
- Li, X. Deployment of Drone Base Stations for Cellular Communication without Apriori User Distribution Information. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 7274–7281. [Google Scholar]
- Li, X.; Xing, L. Optimal Deployment of Drone Base Stations for Cellular Communication by Network-based Localization. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 7282–7287. [Google Scholar]
- Huang, H.; Savkin, A.V.; Ding, M.; Kaafar, M.A. Optimized deployment of drone base station to improve user experience in cellular networks. J. Netw. Comput. Appl. 2019, 144, 49–58. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Range-Based Reactive Deployment of Autonomous Drones for Optimal Coverage in Disaster Areas. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 4606–4610. [Google Scholar] [CrossRef]
- Kalantari, E.; Shakir, M.Z.; Yanikomeroglu, H.; Yongacoglu, A. Backhaul-aware robust 3D drone placement in 5G+ wireless networks. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 109–114. [Google Scholar]
- Coldrey, M.; Engström, U.; Helmersson, K.W.; Hashemi, M.; Manholm, L.; Wallentin, P. Wireless backhaul in future heterogeneous networks. Ericsson Rev. 2014, 91, 1–11. [Google Scholar]
- Fouda, A.; Ibrahim, A.S.; Guvenc, I.; Ghosh, M. UAV-Based in-band Integrated Access and Backhaul for 5G Communications. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement optimization of UAV-mounted mobile base stations. IEEE Commun. Lett. 2016, 21, 604–607. [Google Scholar] [CrossRef] [Green Version]
- Bai, T.; Pan, C.; Wang, J.; Deng, Y.; Elkashlan, M.; Nallanathan, A.; Hanzo, L. Dynamic Aerial Base Station Placement for Minimum-Delay Communications. IEEE Internet Things J. 2020. [Google Scholar] [CrossRef]
- Qiu, C.; Wei, Z.; Yuan, X.; Feng, Z.; Zhang, P. Multiple UAV-Mounted Base Station Placement and User Association with Joint Fronthaul and Backhaul Optimization. IEEE Trans. Commun. 2020, 68, 5864–5877. [Google Scholar] [CrossRef]
- Qiu, C.; Wei, Z.; Feng, Z.; Zhang, P. Backhaul-Aware Trajectory Optimization of Fixed-Wing UAV-Mounted Base Station for Continuous Available Wireless Service. IEEE Access 2020, 8, 60940–60950. [Google Scholar] [CrossRef]
- Al-Ahmed, S.A.; Shakir, M.Z.; Zaidi, S.A.R. Optimal 3D UAV base station placement by considering autonomous coverage hole detection, wireless backhaul and user demand. J. Commun. Netw. 2020, 22, 467–475. [Google Scholar] [CrossRef]
- Mardeni, R.; Shahabi, P.; Riahimanesh, M. Mobile station localization in wireless cellular systems using UTDOA. In Proceedings of the 2012 International Conference on Microwave and Millimeter Wave Technology (ICMMT), Shenzhen, China, 5–8 May 2012; Volume 5, pp. 1–4. [Google Scholar]
- Hamdy, Y.R.; Mawjoud, S.A. Performance assessment of U-TDOA and A-GPS positioning methods. In Proceedings of the 2012 International Conference on Future Communication Networks, Baghdad, Iraq, 2–5 April 2012; pp. 99–104. [Google Scholar]
- Savkin, A.V.; Wang, C. Seeking a path through the crowd: Robot navigation in unknown dynamic environments with moving obstacles based on an integrated environment representation. Robot. Auton. Syst. 2014, 62, 1568–1580. [Google Scholar] [CrossRef]
- Matveev, A.S.; Wang, C.; Savkin, A.V. Real-time navigation of mobile robots in problems of border patrolling and avoiding collisions with moving and deforming obstacles. Robot. Auton. Syst. 2012, 60, 769–788. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Y.; Song, H. Counter-Unmanned Aircraft System(s) (C-UAS): State of the Art, Challenges, and Future Trends. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 4–29. [Google Scholar] [CrossRef]
- Wang, J.; Yue, X.; Liu, Y.; Song, H.; Yuan, J.; Yang, T.; Seker, R. Integrating ground surveillance with aerial surveillance for enhanced amateur drone detection. In Disruptive Technologies in Information Sciences; International Society for Optics and Photonics: San Diego, CA, USA, 2018; Volume 10652, p. 106520E. [Google Scholar]
Figure 1.
Typical application scenarios for UAV surveillance, including border patrol, construction management, power grid inspection, and traffic and environmental monitoring.
Figure 1.
Typical application scenarios for UAV surveillance, including border patrol, construction management, power grid inspection, and traffic and environmental monitoring.

Figure 2.
Number of publications on surveillance UAVs from the Web of Science Core Collection.

Figure 3.
Surveillance UAV applications categorized by the target of interest.

Figure 4.
Summary and taxonomy of previous studies on UAV surveillance for general targets.

Figure 5.
An example illustrating traffic-monitoring UAVs, where the blue dots stand for groups of monitoring targets (pedestrians or vehicles) and the red circles stand for the sensing range of UAVs. With the targets merged and then separated, the UAVs navigate to the locations with better coverage of the targets. A video recording how these UAVs move is available here: https://youtu.be/OEGr5-0zuyg, accessed on 1 July 2021.
Figure 5.
An example illustrating traffic-monitoring UAVs, where the blue dots stand for groups of monitoring targets (pedestrians or vehicles) and the red circles stand for the sensing range of UAVs. With the targets merged and then separated, the UAVs navigate to the locations with better coverage of the targets. A video recording how these UAVs move is available here: https://youtu.be/OEGr5-0zuyg, accessed on 1 July 2021.

Figure 6.
Examples of wildlife-monitoring UAVs for protecting whales, koalas and elephants.

Figure 7.
Illustration of motion camouflage: a pursuer flies towards a moving target, camouflaging its motion by staying on the continually changing camouflage constraint lines.
Figure 7.
Illustration of motion camouflage: a pursuer flies towards a moving target, camouflaging its motion by staying on the continually changing camouflage constraint lines.

Figure 8.
Number of publications on deployment/placement of UAV-BSs From the Web of Science Core Collection.
Figure 8.
Number of publications on deployment/placement of UAV-BSs From the Web of Science Core Collection.

Figure 9.
Example of UAV-BSs’ application scenario.

Figure 10.
Signal transmission of conventional UTDOA positioning.

Figure 11.
Signal transmission of the proposed UTDOA by UAV-BS.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
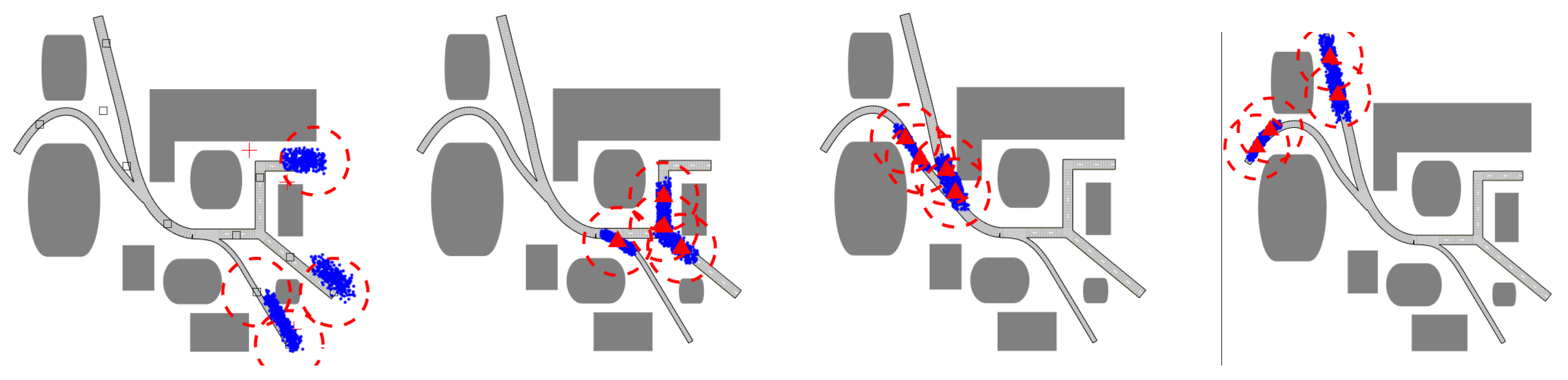{kind=link}
{kind=link}
{kind=link}
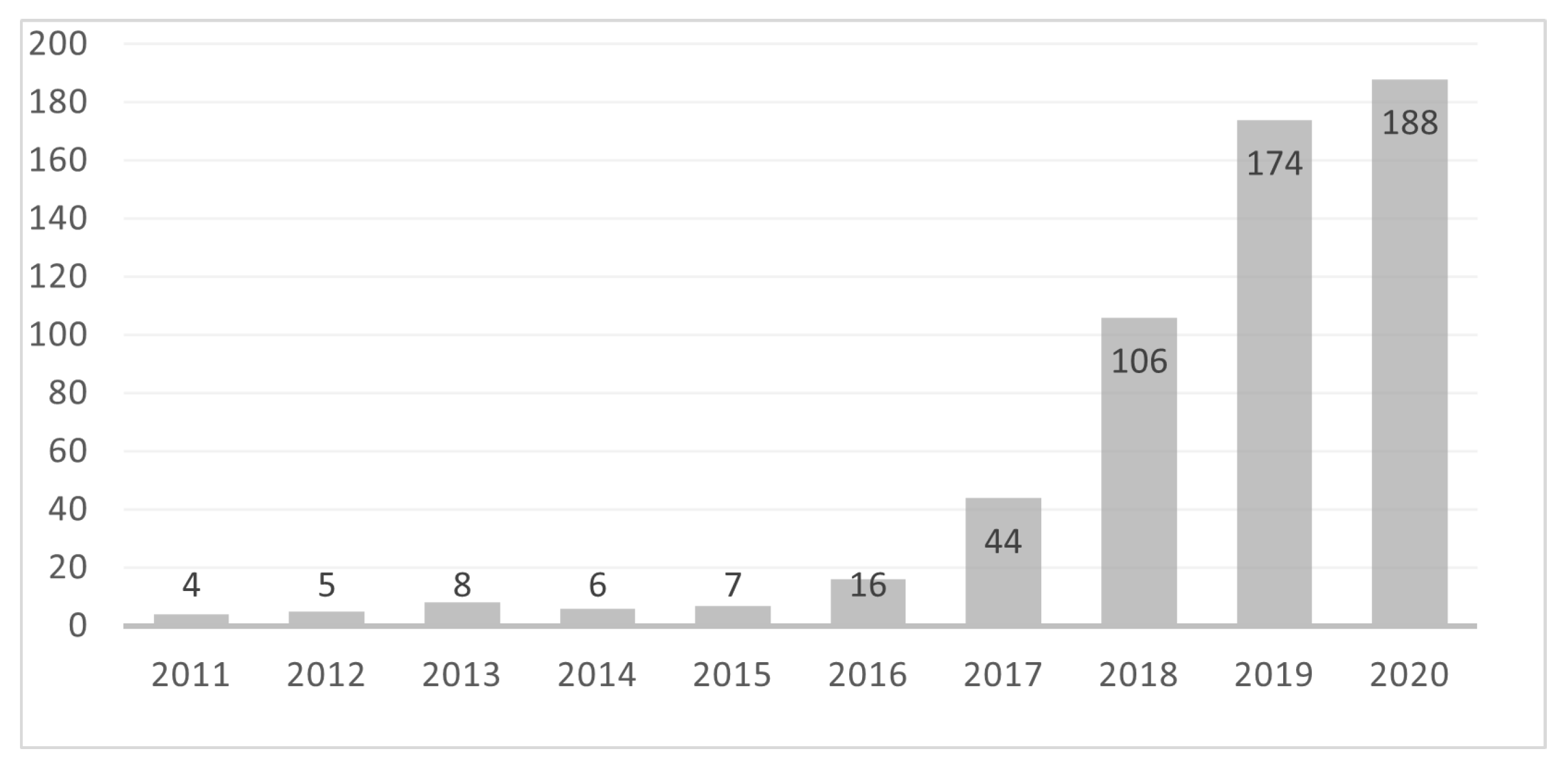{kind=link}
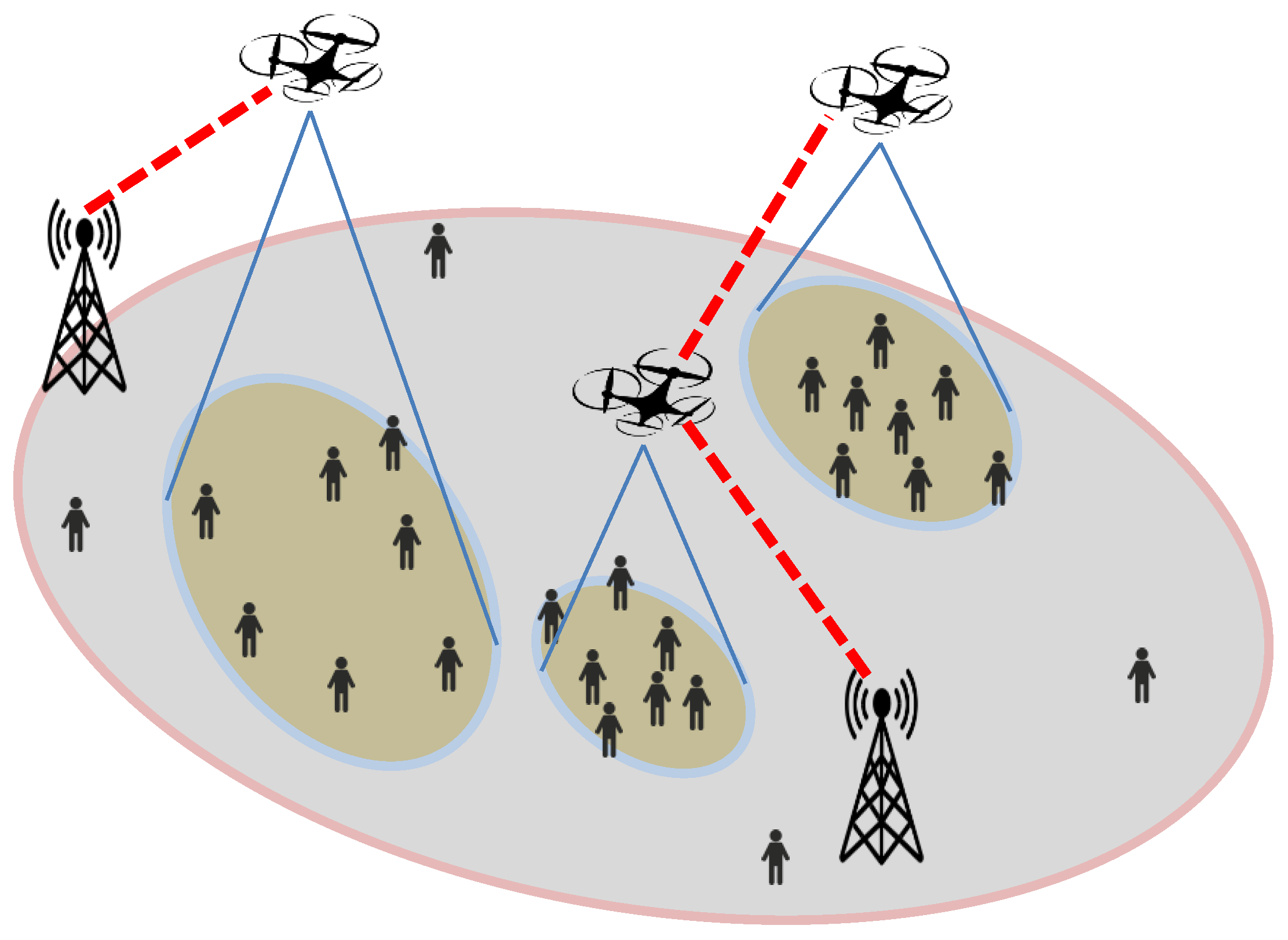{kind=link}
{kind=link}
{kind=link}
Table 1.
Summary of existing publications on wildlife-monitoring UAVs.
| Applications | Species | References |
|---|---|---|
| Health Monitoring | Whale | [62,63] |
| Ungulates | [64] | |
| Forest | [65,66,67,68] | |
| Population Survey | Feral horse | [69] |
| Penguin | [70] | |
| White-tailed deer | [71] | |
| Sumatran orangutan | [72] | |
| Sea Lion | [73] | |
| Sea turtles | [74] | |
| Shark | [75] | |
| Koala | [76] | |
| Behaviour Research | Sea turtles | [61] |
| Whale | [77] | |
| Crocodiles | [78] | |
| Salmon | [79] | |
| Habitats Investigation | Proboscis monkey | [80] |
| Raptor | [81] | |
| Waterbirds | [82] | |
| Anti-poaching | Rhinoceros | [83] |
| Elephant | [84,85] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, X.; Savkin, A.V. Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey. Future Internet 2021, 13, 174. https://0-doi-org.brum.beds.ac.uk/10.3390/fi13070174
AMA Style
Li X, Savkin AV. Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey. Future Internet. 2021; 13(7):174. https://0-doi-org.brum.beds.ac.uk/10.3390/fi13070174
Chicago/Turabian StyleLi, Xiaohui, and Andrey V. Savkin. 2021. "Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey" Future Internet 13, no. 7: 174. https://0-doi-org.brum.beds.ac.uk/10.3390/fi13070174
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.