Driving Performance and Technology Acceptance Evaluation in Real Traffic of a Smartphone-Based Driver Assistance System

 ,
,
Abstract
:1. Introduction
1.1. Driver Assistance Systems
1.2. GPS Navigation Systems for Vehicles
1.3. Technology Acceptance Models of Driver Assistance Systems
1.4. Objectives of the Study
2. Materials and Methods
2.1. Participants
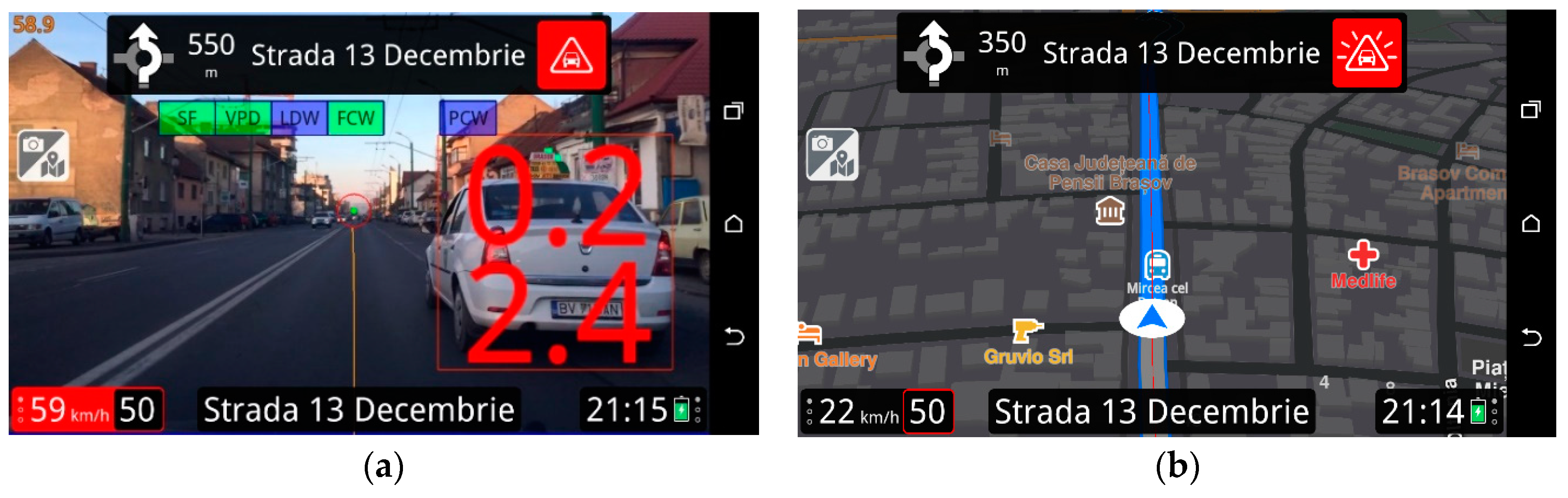
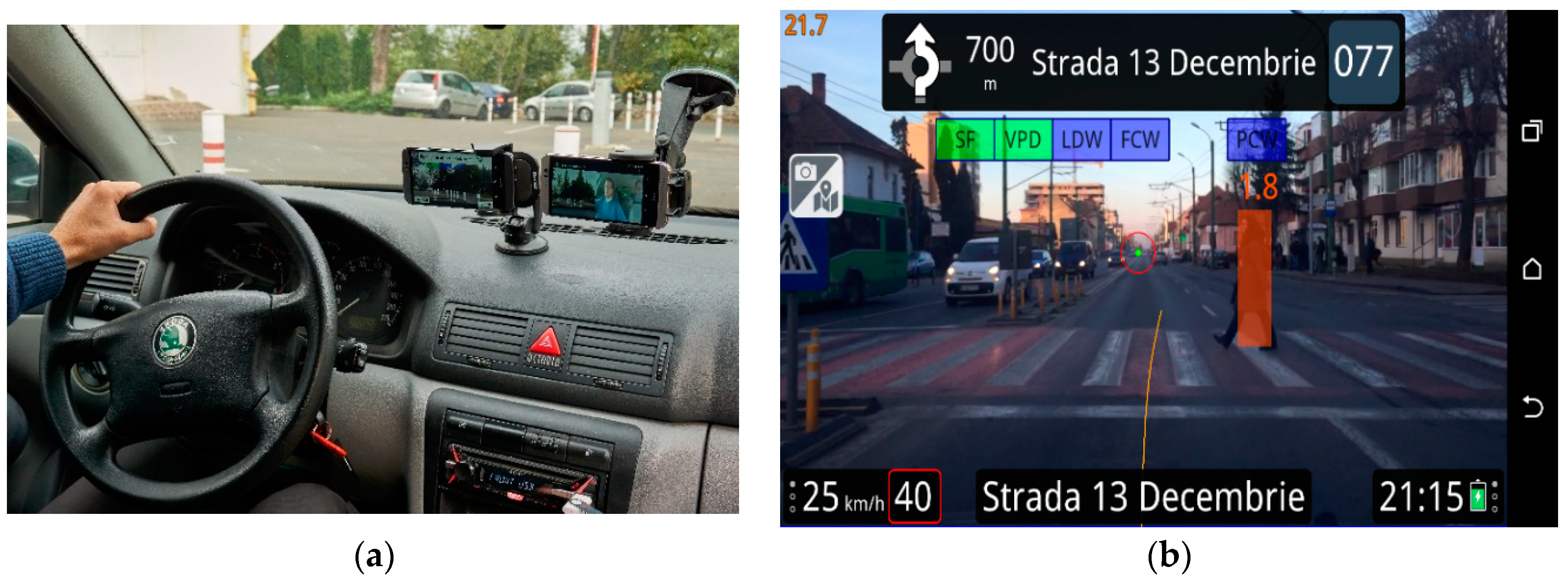
2.2. Tools and Instruments
- Lane departure left/right solid warnings: issued when the vehicle crosses the solid line.
- Nearby vehicle warning: issued at a speed of less than 30 km/h, when the distance to the front vehicle is less than 0.6 m (distance until collision).
- Dangerous headway alert: when time to collision (TTC) is less than 0.8 s.
- Vehicle collision alert: issued when TTC is 2.7 s, which is enough time for the driver to react and avoid an accident.
- Pedestrian collision alert: issued when TTC with a pedestrian is less than 3 s.
2.3. Study Variables
2.4. Study Procedure
2.5. Technology Acceptance Model and Hypothesis
3. Results
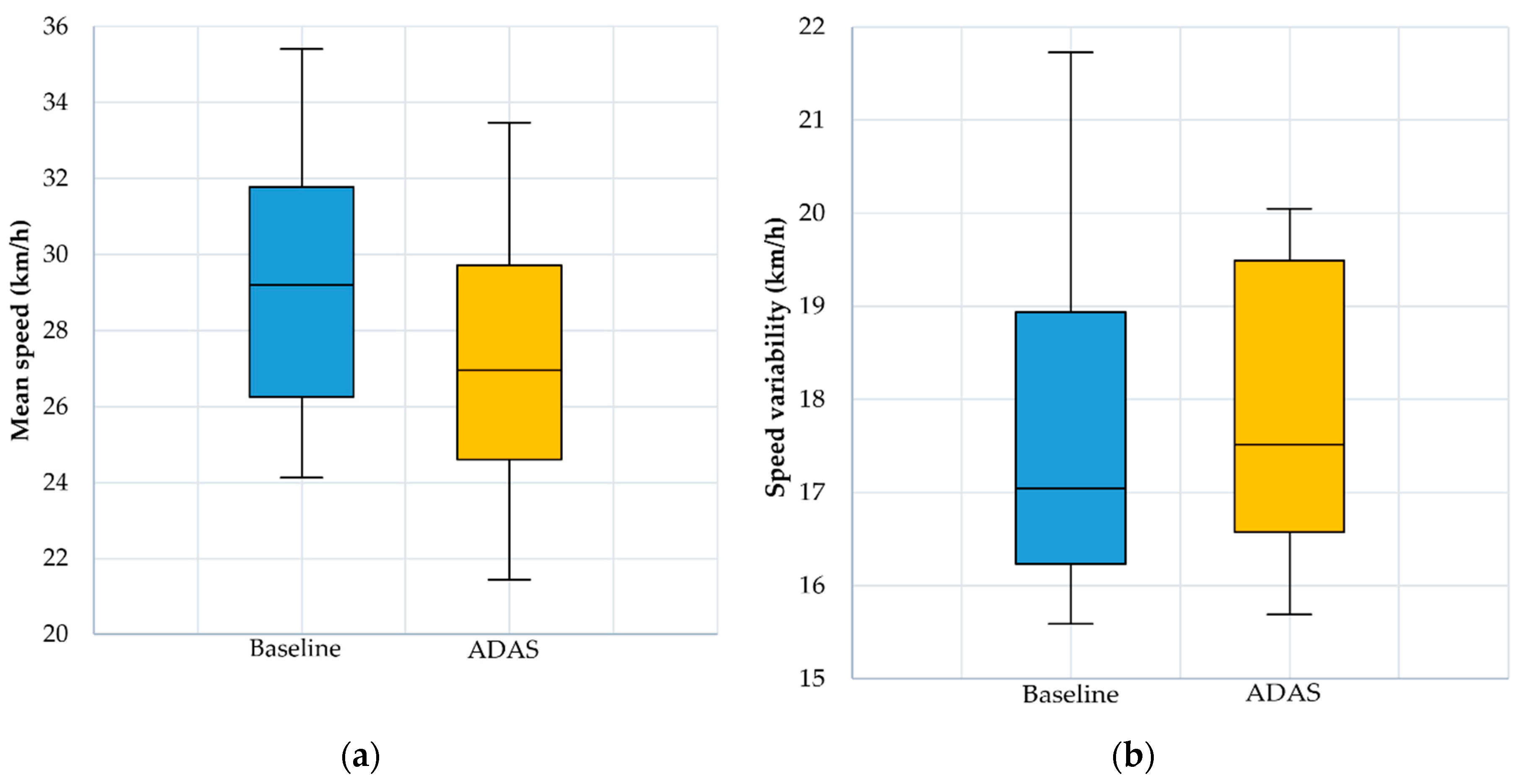
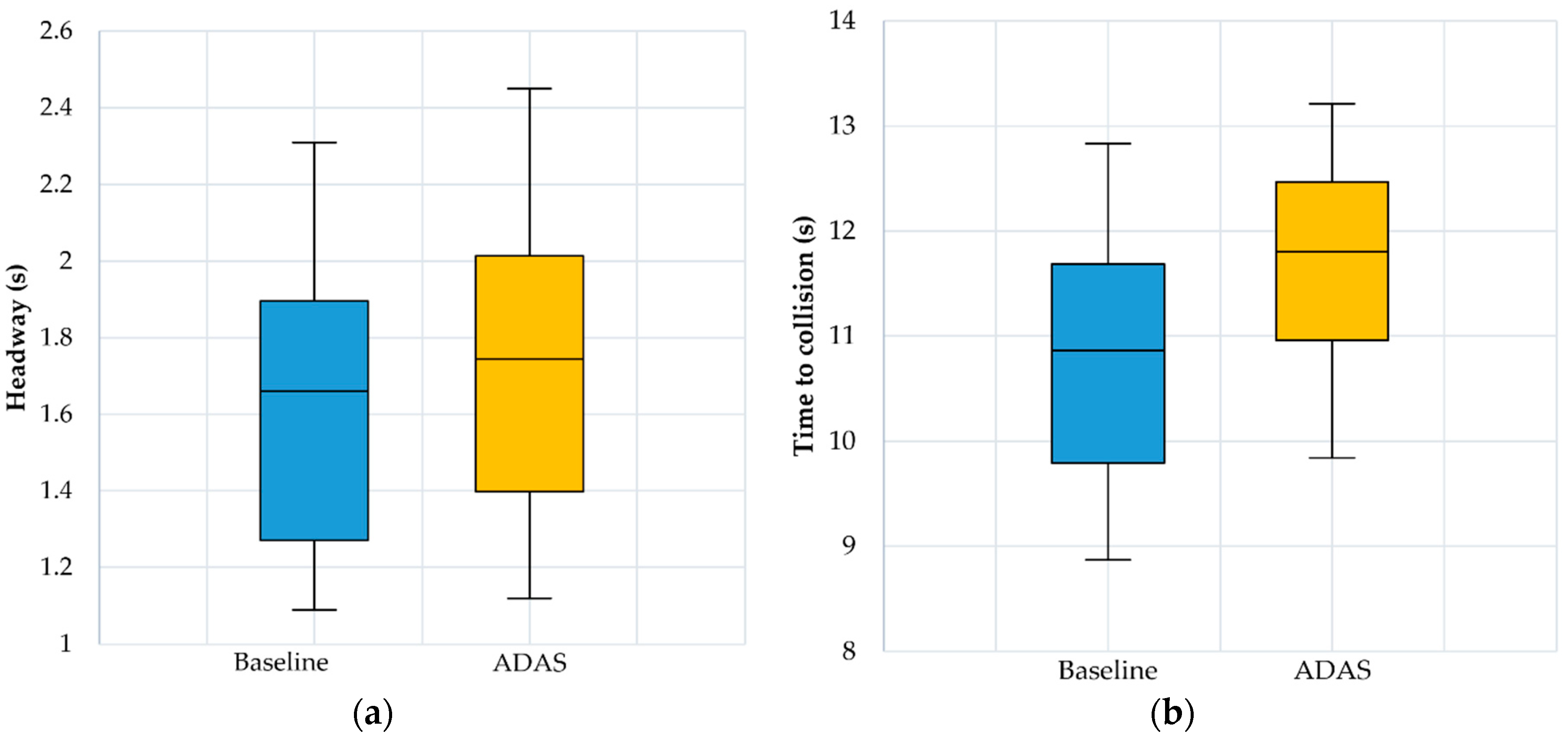
3.1. Driving Performance Assessment
3.2. TAM Results
3.2.1. Data Processing and Analysis
3.2.2. Reliability of Scales and Descriptive Statistics
3.2.3. Hierarchical Linear Regression Analysis
Model 1 (Perceived Usefulness)
Model 2 (Attitude toward Behavior)
Model 3 (Behavioral Intention)
4. Discussion
4.1. Driving Performance
4.2. User’s Acceptance of the Proposed Driver Assistance Application
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acceptance Measure | Survey Question | Scale |
|---|---|---|
| Attitude toward behavior | “The use of the system when I am driving would be” | Bad (1) −> Good (7) |
| “The use of the system when I am driving would be” | Useless (1) −> Useful (7) | |
| “The use of the system when I am driving would be” * | Desirable (1) −> Undesirable (7) | |
| “The use of the system when I am driving would be” | Ineffective (1) −> Effective (7) | |
| “The use of the system when I am driving would be” | Sleep-inducing (1) −> Alerting (7) | |
| “The use of the system when I am driving would be” | Unpleasant (1) −> Pleasant (7) | |
| “The use of the system when I am driving would be” | Extremely annoying (1) −> Not at all annoying (7) | |
| “The use of the system when I am driving would be” | Irritating (1) −> Likeable (7) | |
| “The use of the system when I am driving would be” * | Assisting (1) −> Worthless (7) | |
| Perceived Usefulness | “Using the system would improve my driving performance” | Strongly disagree (1) −> Strongly agree |
| “Using the system in driving increases my safety” | Strongly disagree (1) −> Strongly agree | |
| “Using the system enhances effectiveness in my driving” | Strongly disagree (1) −> Strongly agree | |
| “I would find the system useful in my driving” | Strongly disagree (1) −> Strongly agree | |
| Perceived Ease of Use | “My interaction with the system would be clear and understandable” | Strongly disagree (1) −> Strongly agree |
| “I would find the system difficult to use” * | Strongly disagree (1) −> Strongly agree | |
| “Interacting with the system would not require a lot of mental effort” | Strongly disagree (1) −> Strongly agree | |
| “I would find it easy to get the system to do what I want it to do” | Strongly disagree (1) −> Strongly agree | |
| Behavioral Intention | “If the system is available in the market at an affordable price, I intend to purchase the system” | Strongly disagree (1) −> Strongly agree |
| “If my car is equipped with a similar system, I predict that I would use the system when driving.” | Strongly disagree (1) −> Strongly agree | |
| “Assuming that the system is available, I intend to use the system regularly when I am driving.” | Strongly disagree (1) −> Strongly agree |
References
- Traffic Safety Basic Facts 2018. Available online: https://ec.europa.eu/transport/road_safety/road-safety-facts-figures-1_en (accessed on 21 June 2020).
- New WHO Report Highlights Insufficient Progress to Tackle Lack of Safety on the World’s Roads. Available online: https://www.who.int/violence_injury_prevention/road_safety_status/2018/WHO-press-release-GSRRS-2018.pdf?ua=1 (accessed on 21 June 2020).
- Actuarial Research on the Effectiveness of Collision Avoidance Systems. Ron Actuarial Intelligence LTD. Available online: http://www.ron-ai.com/maagar.php?op=page&id=12 (accessed on 21 June 2020).
- Benmimoun, M.; Zlocki, A.; Eckstein, L. Behavioural changes and user acceptance of adaptive cruise control (ACC) and forward collision warning (FCW): Key findings within an European naturalistic field operational test. In Proceedings of the 23rd Enhanced Safety of Vehicles Conference, Seoul, Korea, 27–30 May 2013. [Google Scholar]
- Cicchino, J.B. Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates. Accid. Anal. Prev. 2017, 99, 142–152. [Google Scholar] [CrossRef]
- Botzer, A.; Musicant, O.; Perry, A. Driver behaviour with a smartphone collision warning application—A field study. Saf. Sci. 2017, 91, 361–372. [Google Scholar] [CrossRef]
- Adell, E.; Várhelyi, A.; Dalla Fontana, M. The effects of a driver assistance system for safe speed and safe distance—A real-life field study. Transp. Res. Part C Emerg. Technol. 2011, 19, 145–155. [Google Scholar] [CrossRef]
- Jiménez, F.; Naranjo, J.E.; Anaya, J.J.; García, F.; Ponz, A.; Armingol, J.M. Advanced driver assistance system for road environments to improve safety and efficiency. Transp. Res. Procedia 2016, 14, 2245–2254. [Google Scholar] [CrossRef] [Green Version]
- Ryder, B.; Gahr, B.; Egolf, P.; Dahlinger, A.; Wortmann, F. Preventing traffic accidents with in-vehicle decision support systems-The impact of accident hotspot warnings on driver behaviour. Decis. Support Syst. 2017, 99, 64–74. [Google Scholar] [CrossRef]
- Chang, S.H.; Lin, C.Y.; Fung, C.P.; Hwang, J.R.; Doong, J.L. Driving performance assessment: Effects of traffic accident location and alarm content. Accid. Anal. Prev. 2008, 40, 1637–1643. [Google Scholar] [CrossRef] [PubMed]
- Mohebbi, R.; Gray, R.; Tan, H.Z. Driver reaction time to tactile and auditory rear end collision warnings while talking on a cell phone. Hum. Factors 2009, 51, 102–110. [Google Scholar] [CrossRef] [Green Version]
- Bao, S.; LeBlanc, D.J.; Sayer, J.R.; Flannagan, C. Heavy-truck drivers’ following behaviour with intervention of an integrated, in-vehicle crash warning system: A field evaluation. Hum. Factors 2012, 54, 687–697. [Google Scholar] [CrossRef]
- Takada, S.; Hiraoka, T.; Kawakami, H. Effectiveness of forward obstacles collision warning system based on deceleration for collision avoidance. IET Intell. Transp. Syst. 2014, 8, 570–579. [Google Scholar] [CrossRef] [Green Version]
- Ben-Yaacov, A.; Maltz, M.; Shinar, D. Effects of an in-vehicle collision avoidance warning system on short- and long-term driving performance. Hum. Factors 2002, 44, 335–342. [Google Scholar] [CrossRef]
- Zhang, J.; Suto, K.; Fujiwara, A. Effects of in-vehicle warning information on drivers’ decelerating and accelerating behaviours near an arch-shaped intersection. Accid. Anal. Prev. 2009, 41, 948–958. [Google Scholar] [CrossRef] [PubMed]
- Kingsley, K.J. Evaluating crash avoidance countermeasures using data from FMCS’s/ NHTSA’s large truck accident causation study. In Proceedings of the 21st International Technical Conference on the Enhanced Safety of Vehicles Conference (ESV)—International Congress Center Stuttgart, Germany, Stuttgart, 15–18 June 2009. [Google Scholar]
- Birrell, S.A.; Fowkes, M.; Jennings, P.A. Effect of using an in-vehicle smart driving aid on real-world driver performance. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1801–1810. [Google Scholar] [CrossRef]
- Cicchino, J.B.; McCartt, A.T. Experiences of model year 2011 Dodge and Jeep owners with collision avoidance and related technologies. Traffic Inj. Prev. 2015, 16, 298–303. [Google Scholar] [CrossRef] [PubMed]
- Special Investigation Report on Highway Rear-End Collision Prevention Technologies. Available online: https://www.ntsb.gov/safety/safety-studies/Documents/SIR0101.pdf (accessed on 21 June 2020).
- The Use of Forward Collision Avoidance Systems to Prevent and Mitigate Rear-End Crashes. Available online: https://www.ntsb.gov/safety/safety-studies/Documents/SIR1501.pdf (accessed on 21 June 2020).
- Road Accident Fatalities—Statistics by Type of Vehicle. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php/Road_accident_fatalities_-_statistics_by_type_of_vehicle (accessed on 21 July 2020).
- Li, J.; Gong, W.; Li, W.; Liu, X. Robust pedestrian detection in thermal infrared imagery using the wavelet transform. Infrared Phys. Technol. 2010, 53, 267–273. [Google Scholar] [CrossRef]
- Khelifi, S.F.; Boudihir, M.E.; Nourine, R. Compressed telesurveillance video database retrieval using fuzzy classification system. In Proceedings of the International Conference Image Analysis and Recognition, Toronto, ON, Canada, 28–30 September 2005; Springer: Berlin/Heidelberg, Germany; pp. 575–584. [Google Scholar]
- Sun, H.; Wang, C.; Wang, B.; El-Sheimy, N. Pyramid binary pattern features for real-time pedestrian detection from infrared videos. Neurocomputing 2011, 74, 797–804. [Google Scholar] [CrossRef]
- Bertozzi, M.; Broggi, A.; Gomez, C.H.; Fedriga, R.I.; Vezzoni, G.; DelRose, M. Pedestrian detection in far infrared images based on the use of probabilistic templates. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 327–332. [Google Scholar]
- Ma, Y.; Chen, X.; Chen, G. Pedestrian detection and tracking using HOG and oriented-LBP features. In Proceedings of the IFIP International Conference on Network and Parallel Computing, Changsha, China, 21–23 October 2011; Springer: Berlin/Heidelberg, Germany; pp. 176–184. [Google Scholar]
- Fazeen, M.; Gozick, B.; Dantu, R.; Bhukhiya, M.; González, M.C. Safe driving using mobile phones. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1462–1468. [Google Scholar] [CrossRef]
- Birrell, S.A.; Fowkes, M.; Stubbs, D. Evaluation of smart driving advisors: Smartphone apps or value added services. In Driver Behaviour and Training; Ashgate: Aldershot, UK, 2012; pp. 451–470. [Google Scholar]
- NTSB Calls for Immediate Action on Collision Avoidance Systems for Vehicles; Cites Slow Progress as Major Safety Issue. Available online: http://www.ntsb.gov/news/press-releases/Pages/PR20150608b.aspx (accessed on 21 June 2020).
- Rusch, M.L.; Schall, M.C., Jr.; Gavin, P.; Lee, J.D.; Dawson, J.D.; Vecera, S.; Rizzo, M. Directing driver attention with augmented reality cues. Transp. Res. Part F Traffic Psychol. Behav. 2013, 16, 127–137. [Google Scholar] [CrossRef] [Green Version]
- Steinberger, F.; Schroeter, R.; Lindner, V.; Fitz-Walter, Z.; Hall, J.; Johnson, D. Zombies on the road: A holistic design approach to balancing gamification and safe driving. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015; pp. 320–327. [Google Scholar]
- Dumitru, A.I.; Girbacia, T.; Boboc, R.G.; Postelnicu, C.C.; Mogan, G.L. Effects of smartphone based advanced driver assistance system on distracted driving behavior: A simulator study. Comput. Hum. Behav. 2018, 83, 1–7. [Google Scholar] [CrossRef]
- Di Stasi, L.L.; Contreras, D.; Canas, J.J.; Candido, A.; Maldonado, A.; Catena, A. The consequences of unexpected emotional sounds on driving behaviour in risky situations. Saf. Sci. 2010, 48, 1463–1468. [Google Scholar] [CrossRef]
- You, C.W.; Montes-de-Oca, M.; Bao, T.J.; Lane, N.D.; Lu, H.; Cardone, G.; Campbell, A.T. CarSafe: A driver safety app that detects dangerous driving behaviour using dual-cameras on smartphones. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 671–672. [Google Scholar]
- iOnRoad Official Website. Available online: http://www.ionroad.com/ (accessed on 21 May 2020).
- Larue, G.S.; Rakotonirainy, A.; Haworth, N.L.; Darvell, M. Assessing driver acceptance of Intelligent Transport Systems in the context of railway level crossings. Transp. Res. Part F Traffic Psychol. Behav. 2015, 30, 1–13. [Google Scholar] [CrossRef]
- Castignani, G.; Derrmann, T.; Frank, R.; Engel, T. Driver behaviour profiling using smartphones: A low-cost platform for driver monitoring. IEEE Intell. Transp. Syst. Mag. 2015, 7, 91–102. [Google Scholar] [CrossRef]
- Knapper, A.S.; Hagenzieker, M.P.; Brookhuis, K.A. Do in-car devices affect experienced users’ driving performance? IATSS Res. 2015, 39, 72–78. [Google Scholar] [CrossRef] [Green Version]
- Young, K.L.; Rudin-Brown, C.M.; Patten, C.; Ceci, R.; Lenné, M.G. Effects of phone type on driving and eye glance behaviour while text-messaging. Saf. Sci. 2014, 68, 47–54. [Google Scholar] [CrossRef]
- Bayer, J.B.; Campbell, S.W. Texting while driving on automatic: Considering the frequency-independent side of habit. Comput. Hum. Behav. 2012, 28, 2083–2090. [Google Scholar] [CrossRef]
- Fu, R.; Chen, Y.; Xu, Q.; Guo, Y.; Yuan, W. A Comparative Study of Accident Risk Related to Speech-Based and Handheld Texting during a Sudden Braking Event in Urban Road Environments. Int. J. Environ. Res. Public Health 2020, 17, 5675. [Google Scholar] [CrossRef]
- Claveria, J.B.; Hernandez, S.; Anderson, J.C.; Jessup, E.L. Understanding truck driver behavior with respect to cell phone use and vehicle operation. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 389–401. [Google Scholar] [CrossRef]
- Nguyen-Phuoc, D.Q.; Oviedo-Trespalacios, O.; Su, D.N.; De Gruyter, C.; Nguyen, T. Mobile phone use among car drivers and motorcycle riders: The effect of problematic mobile phone use, attitudes, beliefs and perceived risk. Accid. Anal. Prev. 2020, 143, 105592. [Google Scholar] [CrossRef]
- Musicant, O.; Lotan, T. Can novice drivers be motivated to use a smartphone based app that monitors their behaviour? Transp. Res. Part F Traffic Psychol. Behav. 2016, 42, 544–557. [Google Scholar] [CrossRef]
- Gielen, A.C.; Sleet, D. Application of behaviour-change theories and methods to injury prevention. Epidemiol. Rev. 2003, 23, 65–76. [Google Scholar] [CrossRef]
- Henzler, M.; Boller, A.; Buchholz, M.; Dietmeyer, K. Are Truck Drivers Ready to Save Fuel? The Objective and Subjective Effectiveness of an Ecological Driver Assistance System. In Proceedings of the IEEE 18th International Conference on Intelligent Transportation Systems (ITSC), Las Palmas, Spain, 15–18 September 2015; pp. 2007–2012. [Google Scholar]
- Chen, C.F.; Chen, P.C. Applying the TAM to travelers’ usage intentions of GPS devices. Expert Syst. Appl. 2011, 38, 6217–6221. [Google Scholar] [CrossRef]
- Lee, W.C.; Cheng, B.W. Effects of using a portable navigation system and paper map in real driving. Accid. Anal. Prev. 2008, 40, 303–308. [Google Scholar] [CrossRef] [PubMed]
- Park, E.; Kim, K.J.; Del Pobil, A.P. An examination of psychological factors affecting drivers’ perceptions and attitudes toward car navigation systems. In IT Convergence and Security 2012; Springer: Dordrecht, The Netherlands, 2013; pp. 555–562. [Google Scholar]
- Park, E.; Kim, K.J. Driver acceptance of car navigation systems: Integration of locational accuracy, processing speed, and service and display quality with technology acceptance model. Pers. Ubiquitous Comput. 2014, 18, 503–513. [Google Scholar] [CrossRef]
- Park, E.; Kim, H.; Ohm, J.Y. Understanding driver adoption of car navigation systems using the extended technology acceptance model. Behav. Inf. Technol. 2015, 34, 741–751. [Google Scholar] [CrossRef]
- Metz, B.; Schoch, S.; Just, M.; Kuhn, F. How do drivers interact with navigation systems in real life conditions? Results of a field-operational-test on navigation systems. Transp. Res. Part F Traffic Psychol. Behav. 2014, 24, 146–157. [Google Scholar] [CrossRef]
- Bueno, M.; Fabrigoule, C.; Ndiaye, D.; Fort, A. Behavioural adaptation and effectiveness of a Forward Collision Warning System depending on a secondary cognitive task. Transp. Res. Part F Traffic Psychol. Behav. 2014, 24, 158–168. [Google Scholar] [CrossRef]
- Legris, P.; Ingham, J.; Collerette, P. Why do people use information technology? A critical review of the technology acceptance model. Inf. Manag. 2003, 40, 191–204. [Google Scholar] [CrossRef]
- Rahman, M.M.; Lesch, M.F.; Horrey, W.J.; Strawderman, L. Assessing the utility of TAM, TPB, and UTAUT for advanced driver assistance systems. Accid. Anal. Prev. 2017, 108, 361–373. [Google Scholar] [CrossRef]
- Auricht, M.; Stark, R. How to consider emotional reactions of the driver within the development of Advanced Driver Assistance Systems (ADAS)? Procedia CIRP 2014, 21, 70–74. [Google Scholar] [CrossRef]
- Auricht, M.; Stark, R. MINARGUS: Test tool for User Experience measurement and parameter modification within ADAS simulation. Procedia CIRP 2015, 36, 83–88. [Google Scholar] [CrossRef] [Green Version]
- Kervick, A.A.; Hogan, M.J.; O’Hora, D.; Sarma, K.M. Testing a structural model of young driver willingness to uptake Smartphone Driver Support Systems. Accid. Anal. Prev. 2015, 83, 171–181. [Google Scholar] [CrossRef]
- Davis, F.D. Perceived usefulness, perceived ease of use and user acceptance of information technology. MIS Q. 1989, 13, 319–339. [Google Scholar] [CrossRef] [Green Version]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User acceptance of information technology: Toward a unified view. MIS Q. 2003, 425–478. [Google Scholar] [CrossRef] [Green Version]
- Ajzen, I. The theory of planned behaviour. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Rahman, M.M.; Strawderman, L.; Lesch, M.F.; Horrey, W.J.; Babski-Reeves, K.; Garrison, T. Modelling driver acceptance of driver support systems. Accid. Anal. Prev. 2018, 121, 134–147. [Google Scholar] [CrossRef] [PubMed]
- Ruscio, D.; Ciceri, M.R.; Biassoni, F. How does a collision warning system shape driver’s brake response time? The influence of expectancy and automation complacency on real-life emergency braking. Accid. Anal. Prev. 2015, 77, 72–81. [Google Scholar] [CrossRef] [PubMed]
- Jamson, A.H.; Lai, F.C.; Carsten, O.M. Potential benefits of an adaptive forward collision warning system. Transp. Res. Part C Emerg. Technol. 2008, 16, 471–484. [Google Scholar] [CrossRef] [Green Version]
- Schwarz, F.; Fastenmeier, W. Augmented reality warnings in vehicles: Effects of modality and specificity on effectiveness. Accid. Anal. Prev. 2017, 101, 55–66. [Google Scholar] [CrossRef]
- Chugh, J.S.; Caird, J.K. In-Vehicle train warnings (ITW): The effect of reliability and failure type on driver perception response time and trust. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 1999, 43, 1012–1016. [Google Scholar] [CrossRef]
- Najm, W.; Stearns, M.; Howarth, H.; Koopmann, J.; Hitz, J.S. Evaluation of an Automotive Rear-End Collision Avoidance System; (No. FHWA-JPO-06-055); National Highway Traffic Safety Administration: Washington, DC, USA, 2006.
- Roberts, S.C.; Ghazizadeh, M.; Lee, J.D. Warn me now or inform me later: Drivers’ acceptance of real-time and post-drive distraction mitigation systems. Int. J. Hum.-Comput. Stud. 2012, 70, 967–979. [Google Scholar] [CrossRef]
- Lee, J.D.; McGehee, D.V.; Brown, T.L.; Reyes, M.L. Collision warning timing, driver distraction, and driver response to imminent rear-end collisions in a high-fidelity driving simulator. Hum. Factors 2002, 44, 314–334. [Google Scholar] [CrossRef] [Green Version]
- Duguleana, M.; Girbacia, F.; Postelnicu, C.; Beraru, A.; Mogan, G. Aspects Concerning the Calibration Procedure for a Dual Camera Smartphone Based ADAS. In Proceedings of the International Conference on Distributed, Ambient, and Pervasive Interactions, Toronto, ON, Canada, 17–22 July 2015; Springer: Cham, Switzerland; pp. 408–417. [Google Scholar]
- Young, K.L.; Regan, M.A.; Triggs, T.J.; Tomasevic, N.; Stephan, K.; Mitsopoulos, E. Impact on car driving performance of a following distance warning system: Findings from the Australian Transport Accident Commission SafeCar Project. J. Intell. Transp. Syst. 2007, 11, 121–131. [Google Scholar] [CrossRef]
- Sieber, M.; Färber, B. Driver perception and reaction in collision avoidance: Implications for ADAS development and testing. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium IV, Gothenburg, Sweden, 19–22 June 2016; pp. 239–245. [Google Scholar]
- Vogel, K. A comparison of headway and time to collision as safety indicators. Accid. Anal. Prev. 2003, 35, 427–433. [Google Scholar] [CrossRef]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention and Behaviour: An Introduction to Theory and Research; Addison-Wesley series in social psychology; Addison-Wesley: Boston, MA, USA, 1975; ISBN 13: 978-0201020892. [Google Scholar]
- Kiefer, R.J.; Flannagan, C.A.; Jerome, C.J. Time-to-collision judgments under realistic driving conditions. Hum. Factors 2006, 48, 334–345. [Google Scholar] [CrossRef] [PubMed]
- Laureshyn, A.; De Ceunynck, T.; Karlsson, C.; Svensson, Å.; Daniels, S. In search of the severity dimension of traffic events: Extended Delta-V as a traffic conflict indicator. Accid. Anal. Prev. 2017, 98, 46–56. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- NHTSA-IIHS, Announcement on AEB. Available online: https://www.nhtsa.gov/press-releases/nhtsa-iihs-announcement-aeb (accessed on 21 May 2020).
- Naujoks, F.; Totzke, I. Behavioural adaptation caused by predictive warning systems–The case of congestion tail warnings. Transp. Res. Part F Traffic. Psychol. Behav. 2014, 26, 49–61. [Google Scholar] [CrossRef]
- Várhelyi, A.; Kaufmann, C.; Persson, A. User-related assessment of a Driver Assistance System for Continuous Support–A field trial. Transp. Res. Part F Traffic. Psychol. Behav. 2015, 30, 128–144. [Google Scholar] [CrossRef]
- Hair, J.F., Jr.; Black, W.C.; Babin, B.J.; Anderson, R.E. Multivariate Data Analysis, 7th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- Ghazizadeh, M.; Peng, Y.; Lee, J.D.; Boyle, L.N. Augmenting the technology acceptance model with trust: Commercial drivers’ attitudes towards monitoring and feedback. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Boston, MA, USA, 22–26 October 2012; Volume 56, pp. 2286–2290. [Google Scholar]
- Höltl, A.; Trommer, S. Driver assistance systems for transport system efficiency: Influencing factors on user acceptance. J. Intell. Transp. Syst. 2013, 17, 245–254. [Google Scholar] [CrossRef]
- Micucci, A.; Mantecchini, L.; Sangermano, M. Analysis of the relationship between turning signal detection and motorcycle driver’s characteristics on urban roads; A case study. Sensors 2019, 19, 1802. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Jia, J.; Zuo, Z.; Ando, R. Heterogeneity in the effectiveness of cooperative crossing collision prevention systems. Transp. Res. Part C Emerg. Technol. 2018, 87, 1–10. [Google Scholar] [CrossRef]







| Category | Variable Name | Short Description |
|---|---|---|
| Demographic variables | Age | |
| Gender | ||
| Driving experience (number of years) | ||
| Estimated annual mileage (km) | ||
| Driving task performance: | Speed control. | Two variables were used to assess the speed control: (a) mean speed (km/h), calculated with V = (x1 − x0)/t, with x1 − x0 representing the length of the road and t is the time needed to complete the driving test; (b) speed variability, represented by the standard deviation of the driving speed (km/h). |
| Time Headway | Time headway is an indicator of criticality for a given traffic scene and represents the time needed by the following vehicle to reach the same point as the lead vehicle [73]. | |
| Time to Collision | TTC is defined as the time until a collision would happen if two successive vehicles keep their course and speed unchanged. | |
| Lane departure. | This variable was defined by the number of lane departures. A lane departure (left or right) was determined when the vehicle has crossed the driving lane boundaries. | |
| Variable | Mean | SD | PEoU | PU | ATT | BI |
|---|---|---|---|---|---|---|
| PEoU | 4.83 | 0.76 | 0.74 | |||
| PU | 5.22 | 0.89 | 0.43 * | 0.70 | ||
| ATT | 5.71 | 0.58 | 0.40 * | 0.70 * | 0.87 | |
| BI | 5.90 | 0.69 | 0.55 * | 0.69 * | 0.93 * | 0.75 |
| Independent Variable | Step 1 |
|---|---|
| PEoU | 0.44 ** |
| R2 | 0.19 ** |
| F-value | 5.18 ** |
| Independent Variable | Step 1 | Step 2 |
|---|---|---|
| PEoU | 0.40 ** | 0.12 |
| PU | 0.64 * | |
| R2 | 0.16 ** | 0.50 * |
| Adjusted R2 | 0.46 * | |
| F-value | 4.37 ** | 10.61 * |
| ΔR2 | 0.34 |
| Independent Variable | Step 1 | Step 2 | Step 3 |
|---|---|---|---|
| PEoU | 0.55 * | 0.31 | 0.21 ** |
| PU | 0.56 * | 0.02 | |
| ATT | 0.83 * | ||
| R2 | 0.31 * | 0.56 * | 0.90 * |
| Adjusted R2 | 0.52 | 0.89 | |
| F-value | 9.79 * | 13.26 * | 62.59 * |
| ΔR2 | 0.25 | 0.34 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Voinea, G.-D.; Postelnicu, C.C.; Duguleana, M.; Mogan, G.-L.; Socianu, R. Driving Performance and Technology Acceptance Evaluation in Real Traffic of a Smartphone-Based Driver Assistance System. Int. J. Environ. Res. Public Health 2020, 17, 7098. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph17197098
Voinea G-D, Postelnicu CC, Duguleana M, Mogan G-L, Socianu R. Driving Performance and Technology Acceptance Evaluation in Real Traffic of a Smartphone-Based Driver Assistance System. International Journal of Environmental Research and Public Health. 2020; 17(19):7098. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph17197098
Chicago/Turabian StyleVoinea, Gheorghe-Daniel, Cristian Cezar Postelnicu, Mihai Duguleana, Gheorghe-Leonte Mogan, and Radu Socianu. 2020. "Driving Performance and Technology Acceptance Evaluation in Real Traffic of a Smartphone-Based Driver Assistance System" International Journal of Environmental Research and Public Health 17, no. 19: 7098. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph17197098