
A Geometric Layout Method for Synchronous Pseudolite Positioning Systems Based on a New Weighted HDOP


Abstract
:
1. Introduction
2. Geometric Precision Factor
2.1. Mathematical Description of Geometric Precision Factor
2.2. Fitting Algorithm of GDOP
2.3. WHDOP Fitting Algorithm
3. Simulation Experiment of the Proposed Algorithm
3.1. Simulation for Calculating WHDOP
3.2. Pseudolites Geometric Planning Simulation
3.3. Actual Positioning Experiment
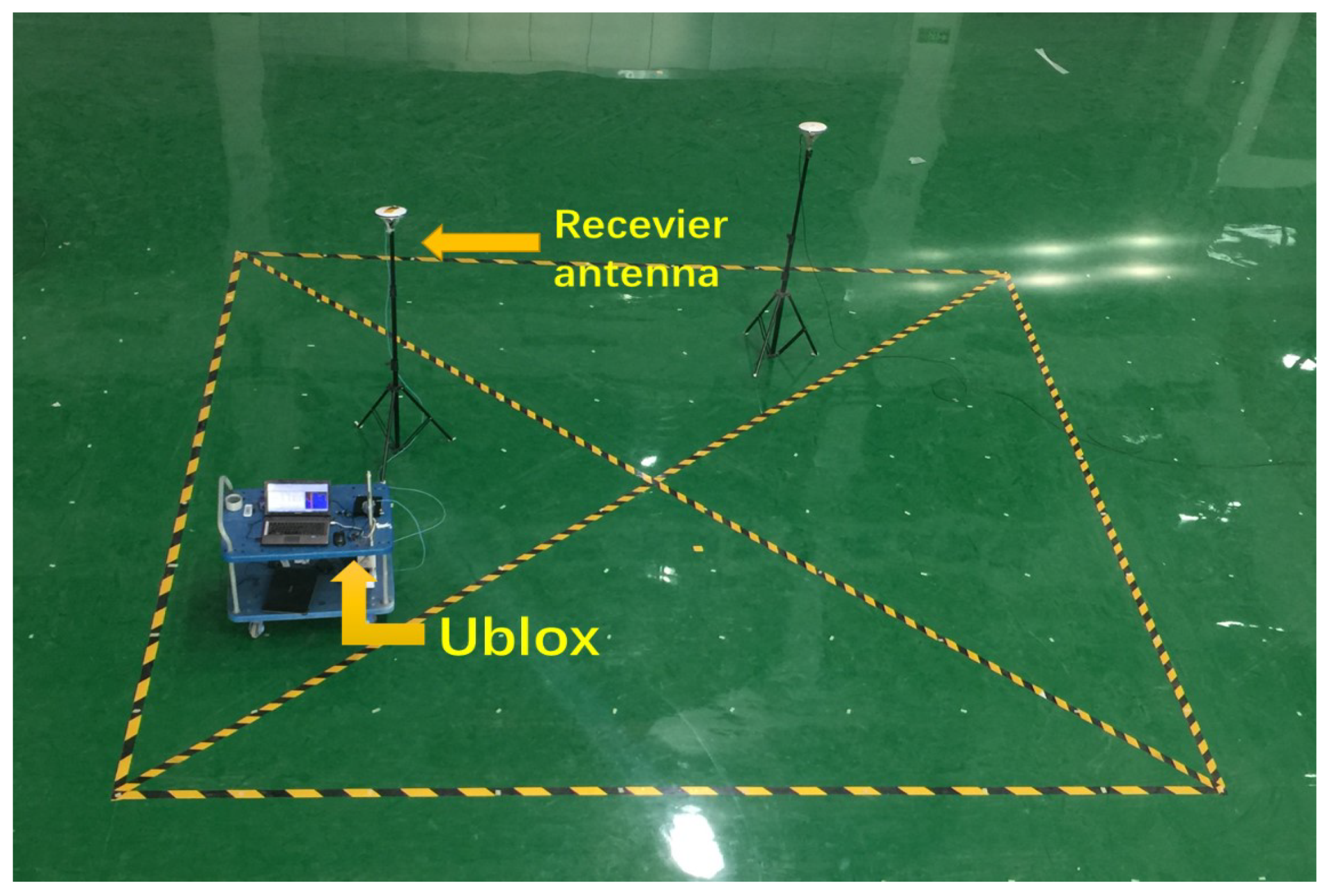
4. Experiments by Indoor Navigation System
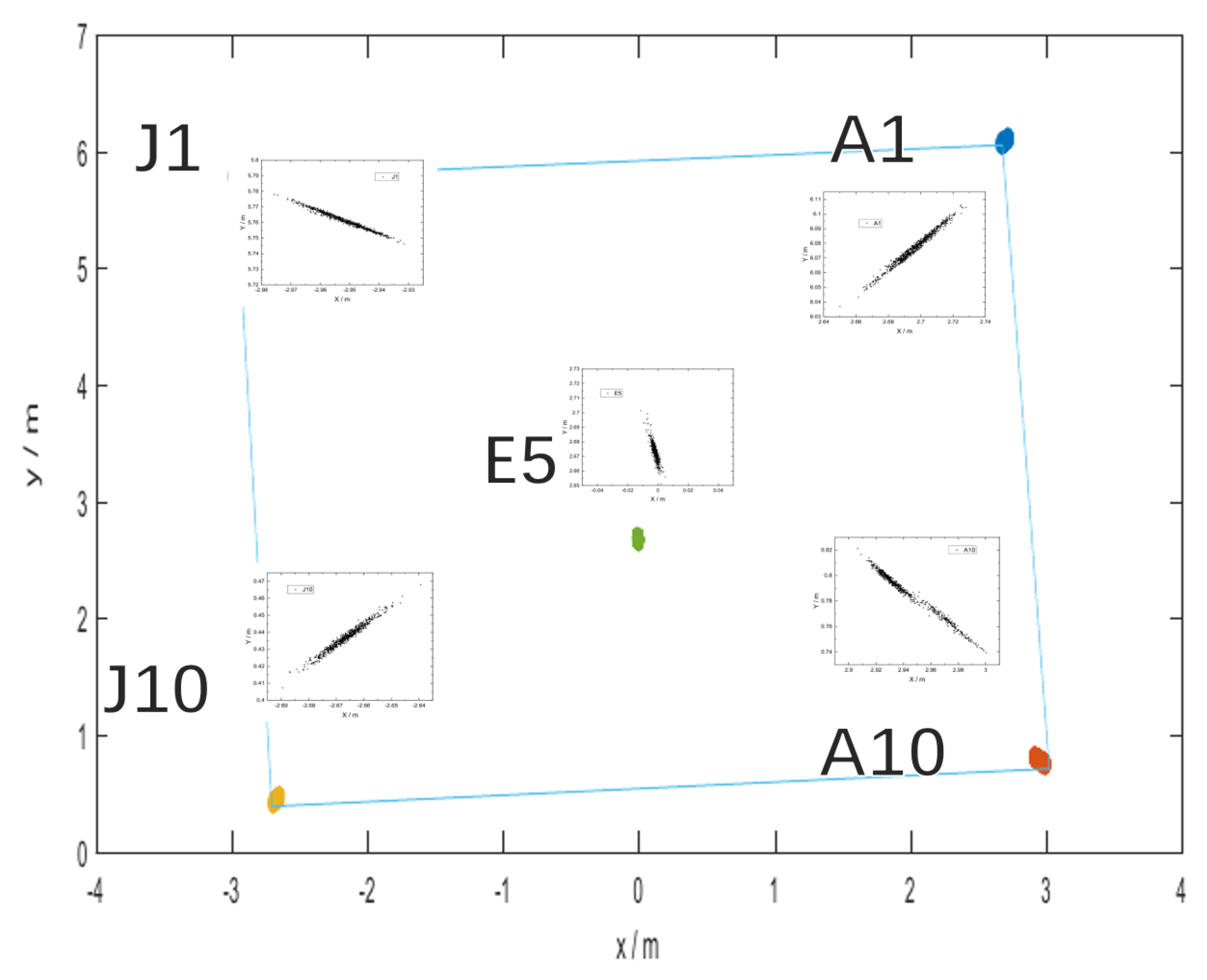
4.1. Static Point Positioning
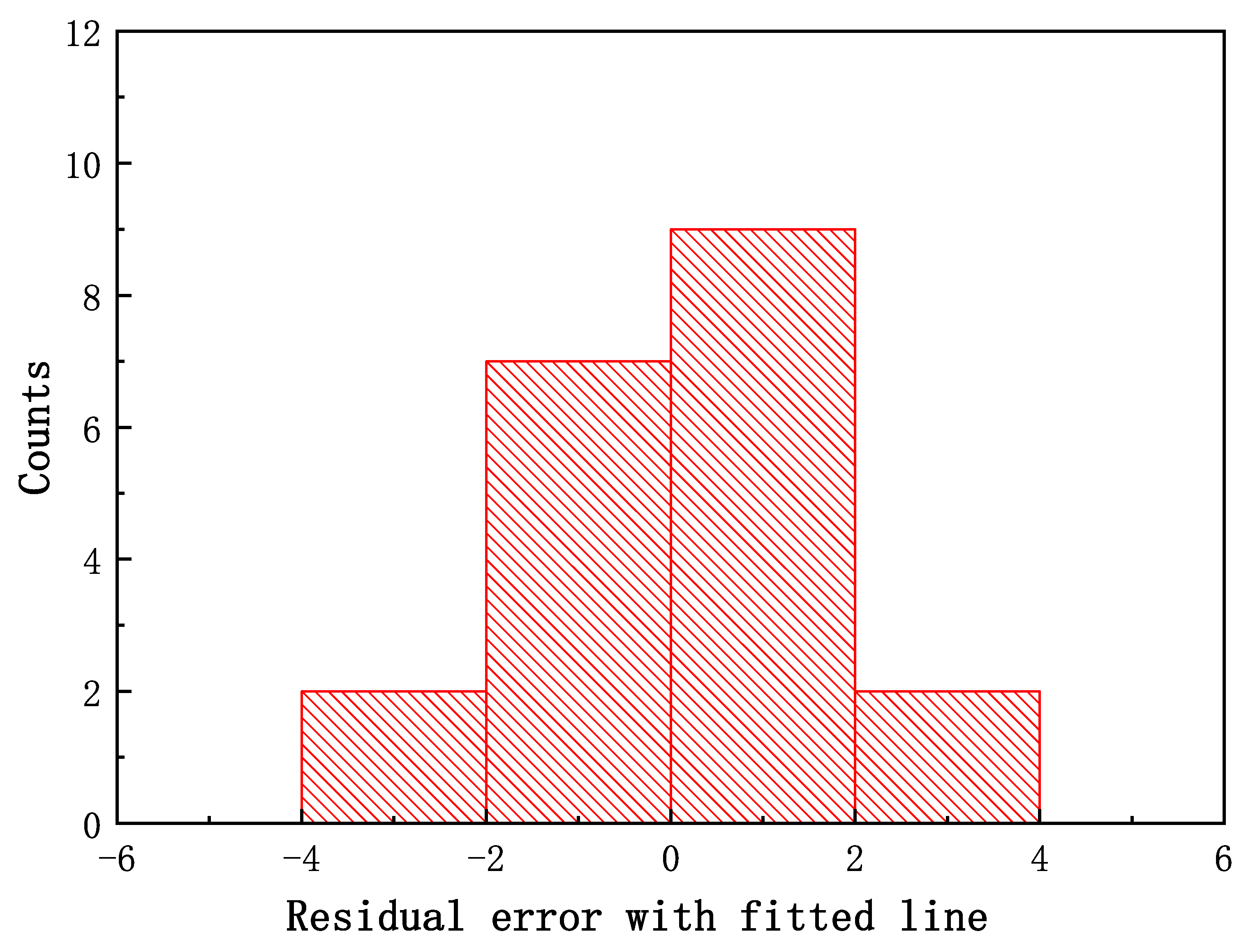
4.2. Pearson Correlation Coefficient Verification
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chao, M.; Wang, J.; Chen, J. Beidou compatible indoor positioning system architecture design and research on geometry of pseudolite. In Proceedings of the 2016 Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS), Shanghai, China, 9 January 2017; pp. 176–181. [Google Scholar]
- Chen, Y.; Francisco, J.-A.; Trappe, W.; Martin, R.P. A practical approach to landmark deployment for indoor localization. In Proceedings of the 2006 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, USA, 28–28 September 2006; Volume 1, pp. 365–373. [Google Scholar]
- Ma, C.; Yang, J.; Chen, J.; Tang, Y. Indoor and outdoor positioning system based on navigation signal simulator and pseudolites. Adv. Space Res. 2018, 62, 2509–2517. [Google Scholar] [CrossRef]
- Guo, X.; Zhou, Y.; Wang, J.; Liu, K.; Liu, C. Precise point positioning for ground-based navigation systems without accurate time synchronization. GPS Solut. 2018, 22, 34. [Google Scholar] [CrossRef]
- Cobb, S.; Lawrence, D.; Pervan, B.; Cohen, C.; Powell, D.; Parkinson, B. Precision landing tests with improved integrity beacon pseudolites. Proc. ION GPS 1995, 8, 827–833. [Google Scholar]
- Montillet, J.P.; Roberts, G.W.; Hancock, C.; Meng, X.; Ogundipe, O.; Barnes, J. Deploying a Locata network to enable precise positioning in urban canyons. J. Geod. 2009, 83, 91–103. [Google Scholar] [CrossRef]
- Wang, T.; Yao, Z.; Lu, M. On-the-fly ambiguity resolution involving only carrier phase measurements for stand-alone ground-based positioning systems. GPS Solut. 2019, 23, 36. [Google Scholar] [CrossRef]
- Sairo, H.; Akopian, D.; Takala, J. Weighted dilution of precision as quality measure in satellite positioning. IEE Proc.-Radar Sonar Navig. 2003, 150, 430–436. [Google Scholar] [CrossRef]
- Shing, H.; Doong, A. Closed-form equation for GPS GDOP computation. GPS Solut. 2009, 13, 183–190. [Google Scholar]
- Jwo, D.; Lai, C. Neural network-based GPS GDOP approximation and classification. GPS Solut. 2007, 13, 51–60. [Google Scholar] [CrossRef]
- Zhu, J. Calculation of geometric dilution of precision. IEEE Trans. Aerosp. Elect. Syst. 1992, 28, 893–894. [Google Scholar]
- Yarlagadda, R.; Ali, I.; Al-Dhahir, N.; Hershey, J. GPS GDOP metric. IEE Proc. Radar Sonar Navig. 2000, 147, 259–264. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, J.; Chen, J. Indoor precise point positioning with pseudolites using estimated time biases iPPP and iPPP-RTK. GPS Solut. 2021, 25, 41. [Google Scholar] [CrossRef]
- Wang, T.; Yao, Z.; Lu, M. Combined difference square observation-based ambiguity determination for ground-based positioning system. J. Geod. 2019, 93, 1867–1880. [Google Scholar] [CrossRef]
- Hu, W.; Yang, J.J.; He, P. Study on Pseudolite Configuration Scheme Based on Near Space Airships. Radio Eng. 2009, 39, 10. [Google Scholar]
- Yi, Y.; She-sheng, G.; Hai-feng, Y. Design on geometric configuration schemes of pseudolite in near space. Syst. Eng. Electron. 2014, 36, 3. [Google Scholar]
- Simon, D.; El-Sherief, H. Navigation satellite selection using neural networks. Neurocomputing 1995, 7, 247–258. [Google Scholar] [CrossRef] [Green Version]
- Hager, W.W. Updating the inverse of a matrix. SIAM Rev. 1989, 31, 221–239. [Google Scholar] [CrossRef]
- Shi, Y.H.; Eberhart, R. A Modified Particle Swarm Optimizer. In Proceedings of the IEEE Conference on Evolutionary Computation, Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Barnes, J.; Rizos, C.; Wang, J.; Small, D.; Voigt, G.; Gambale, N. Locata: A new positioning technology for high precision indoor and outdoor positioning. In Proceedings of the 2003 International Symposium on GPS, Tokyo, Japan, 15–18 November 2003; pp. 9–18. [Google Scholar]
- Hoffman, K.; Kunze, R.A. Linear Algebra; Prentice-Hall: Englewood Cliffs, NJ, USA, 1961. [Google Scholar]
- Santerre, R.; Geiger, A.; Banville, S. Geometry of GPS dilution of precision: Revisited. GPS Solut. 2017, 21, 1747–1763. [Google Scholar] [CrossRef]
- Chen, C. Weighted Geometric Dilution of Precision Calculations with Matrix Multiplication. Sensors 2015, 15, 803–817. [Google Scholar] [CrossRef]
- Pan, L.; Cai, C.; Santerre, R.; Zhang, X. Performance evaluation of single-frequency point positioning with GPS, GLONASS, Beidou and Galileo. Surv. Rev. 2016, 49, 197–205. [Google Scholar] [CrossRef]
- Metropolis, N.; Ulam, S. The monte carlo method. J. Am. Stat. Assoc. 1949, 44, 335–341. [Google Scholar] [CrossRef]
- Bernstein, D.J. Understanding Brute Force. 2005. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.139.4510&rep=rep1&type=pdf (accessed on 11 September 2021).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Pseudolites | 4 | 6 | 8 |
|---|---|---|---|
| a | −0.295 | −0.259 | −0.656 |
| b | 0.401 | 0.173 | 0.394 |
| c | −0.052 | 0.132 | 0.387 |
| d | 313 | 1064 | 1995 |
| Mean WHDOP value | 14.072 | 12.002 | 6.843 |
| Average error | 1.134 | 0.743 | 0.643 |
| Error percentage | 8.66% | 6.19% | 9.40% |
| WHDOP Value | ≤4 | 4–5 | 5–6 | >6 | Mean WHDOP |
|---|---|---|---|---|---|
| Proposed Method | 41.8% | 21.6% | 13.8% | 22.8% | 4.8 |
| Brute Force Search | 39.4% | 26.6% | 14.0% | 20.0% | 4.7 |
| WHDOP Value | ≤4 | 4–5 | 5–6 | > 6 | Mean WHDOP |
|---|---|---|---|---|---|
| 6 pseudolites | 78.0% | 10.2% | 10.8% | 1.0% | 2.958 |
| 8 pseudolites | 85.8% | 8.2% | 5.8% | 0.4% | 2.694 |
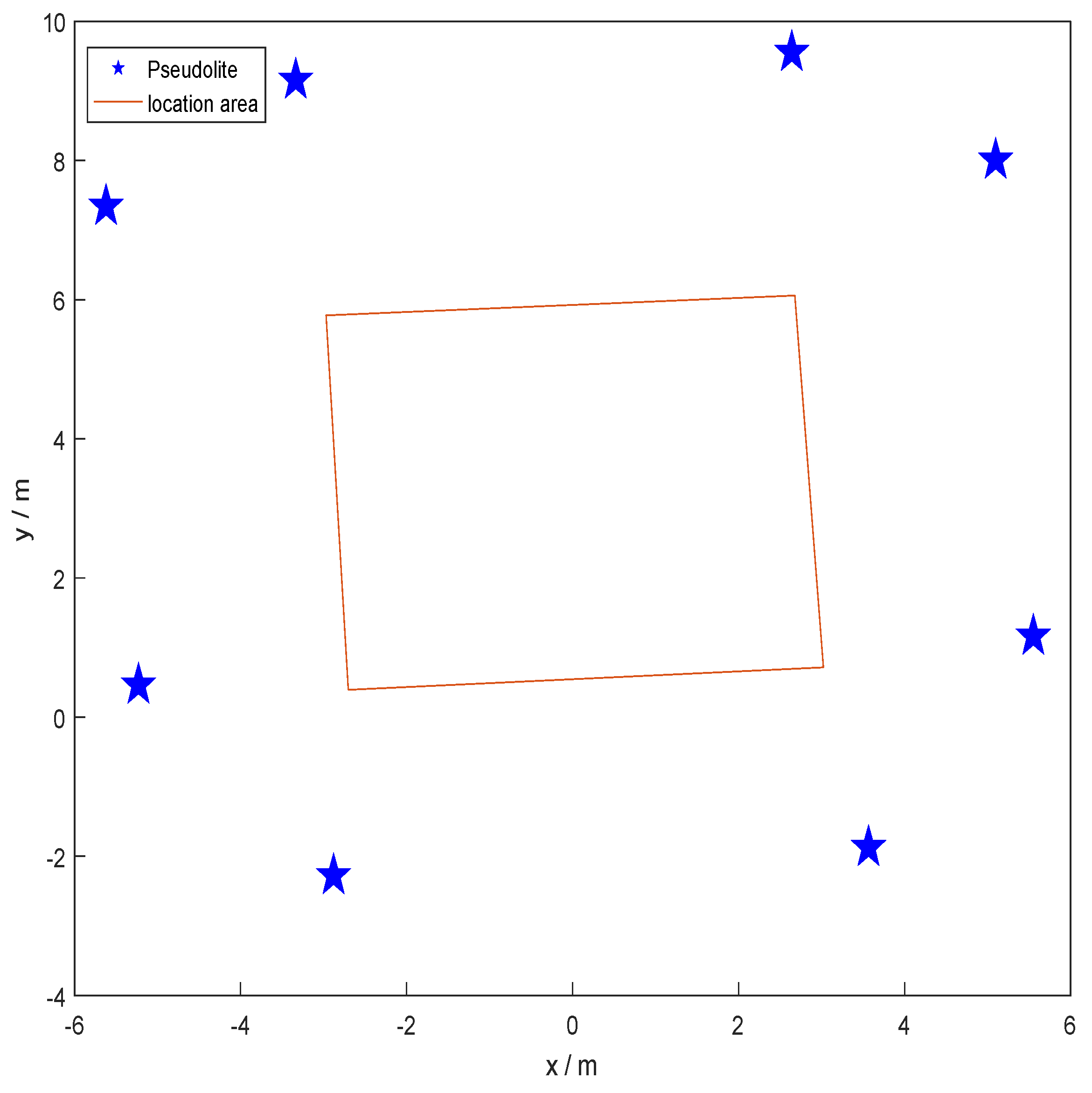
| Pseudolite | X (m) | Y (m) | Z (m) |
|---|---|---|---|
| 1 | 3.5659 | −1.8707 | 11.3553 |
| 2 | −2.8797 | −2.2747 | 11.3568 |
| 3 | −5.2303 | 0.464 | 11.3562 |
| 4 | −5.6214 | 7.344 | 11.3456 |
| 5 | −3.3354 | 9.1587 | 11.3428 |
| 6 | 2.6414 | 9.5559 | 11.3459 |
| 7 | 5.098 | 8.0073 | 11.3476 |
| 8 | 5.5518 | 1.1654 | 11.3507 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Shuai, Q.; Li, G.; Lu, F.; Zhu, B. A Geometric Layout Method for Synchronous Pseudolite Positioning Systems Based on a New Weighted HDOP. ISPRS Int. J. Geo-Inf. 2021, 10, 601. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10090601
Zhao X, Shuai Q, Li G, Lu F, Zhu B. A Geometric Layout Method for Synchronous Pseudolite Positioning Systems Based on a New Weighted HDOP. ISPRS International Journal of Geo-Information. 2021; 10(9):601. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10090601
Chicago/Turabian StyleZhao, Xinyang, Qiangqiang Shuai, Guangchen Li, Fangzhou Lu, and Bocheng Zhu. 2021. "A Geometric Layout Method for Synchronous Pseudolite Positioning Systems Based on a New Weighted HDOP" ISPRS International Journal of Geo-Information 10, no. 9: 601. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10090601