
Integrated WiFi/PDR/Smartphone Using an Adaptive System Noise Extended Kalman Filter Algorithm for Indoor Localization


Abstract
:1. Introduction
2. The Wireless Positioning Technology Based on Field Strength
2.1. The Feature Extraction Integrating the Distance and Signal Information
2.2. Affinity Propagation Clustering
(1) Attraction message r(i, j)
(2) The attribution message a(i, j).
(3) The self-attribution message:
2.3. Positioning Point Set Searching
3. PDR and Wi-Fi Fusion Algorithm
3.1. Adaptive-Weighted Smoothing Filter Based on the Displacement Constraint
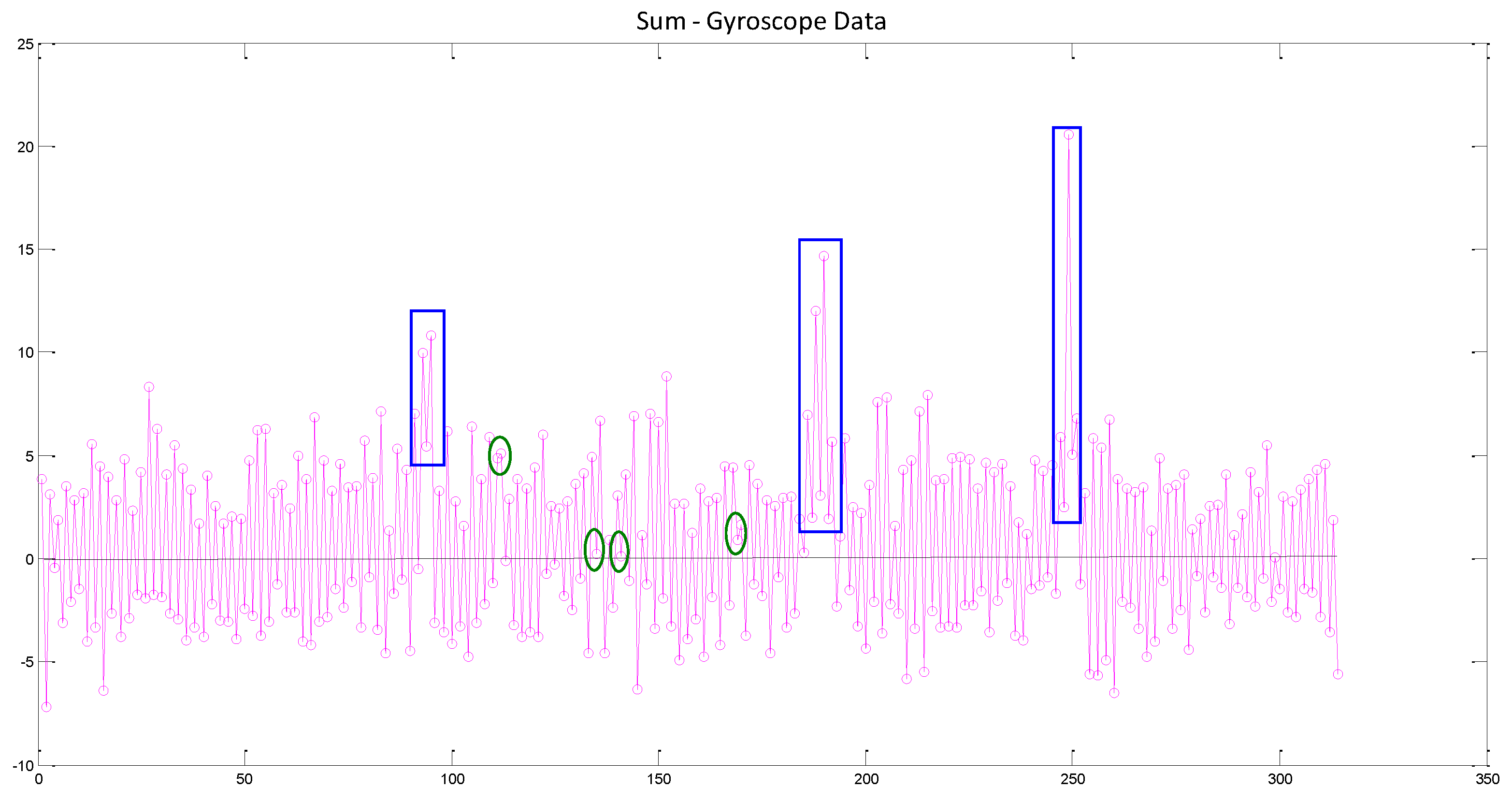
3.2. Adaptive System Noise Filter Based on the Pedestrian’s Moving Status
4. Experimental Analysis

4.1. Wi-Fi Positioning Analysis

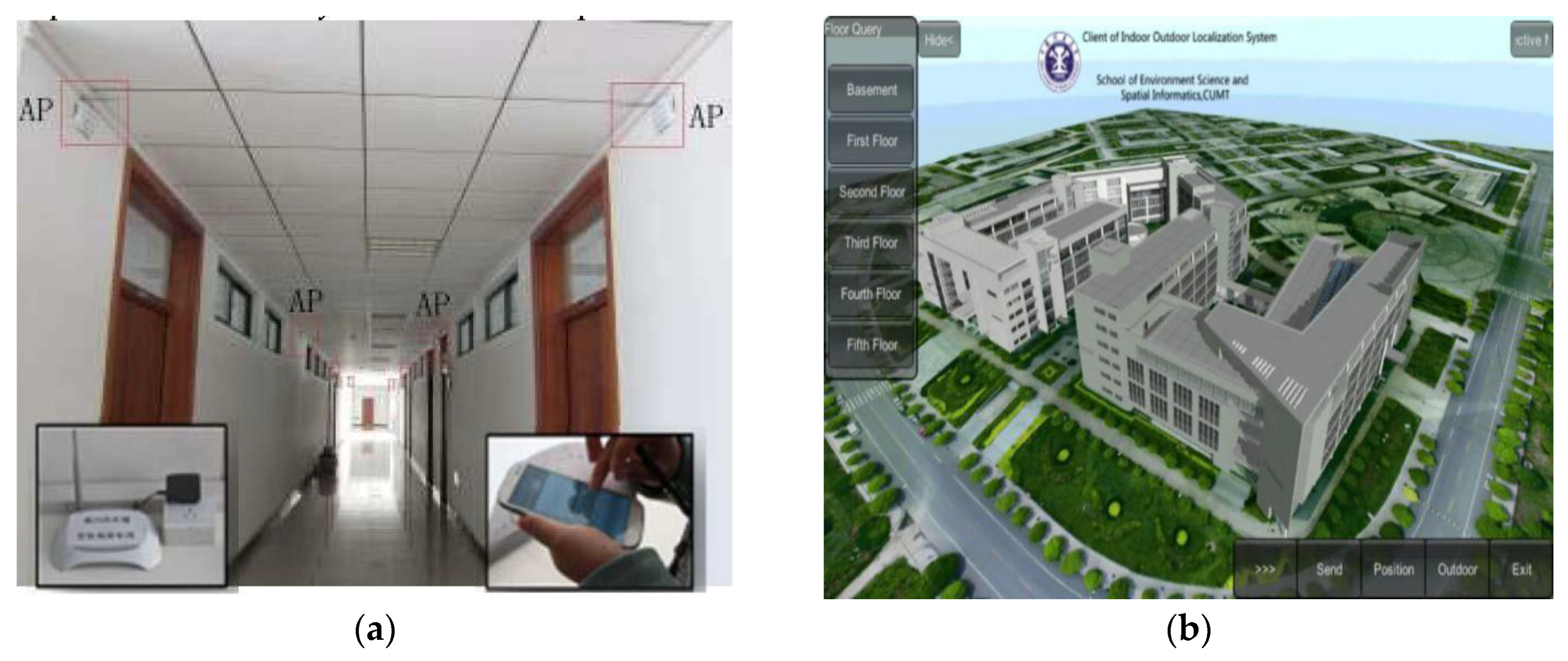
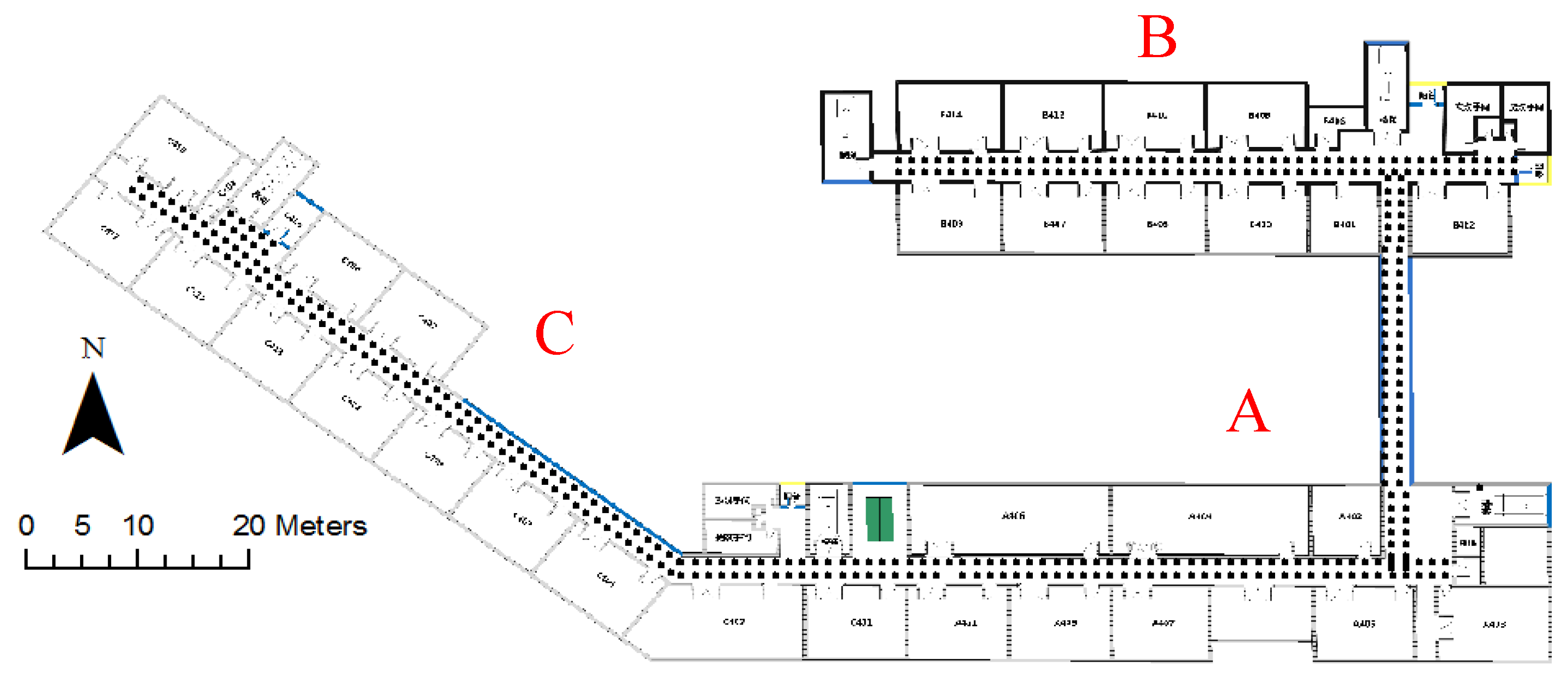
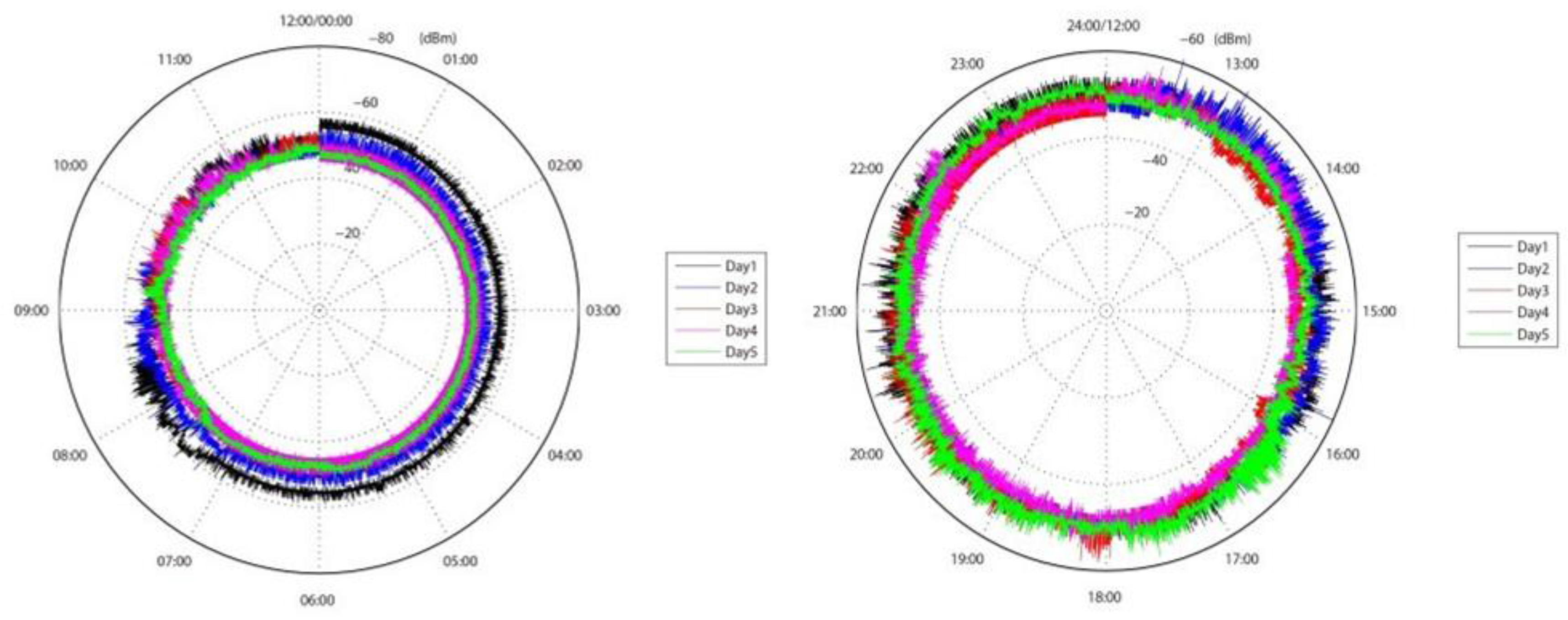
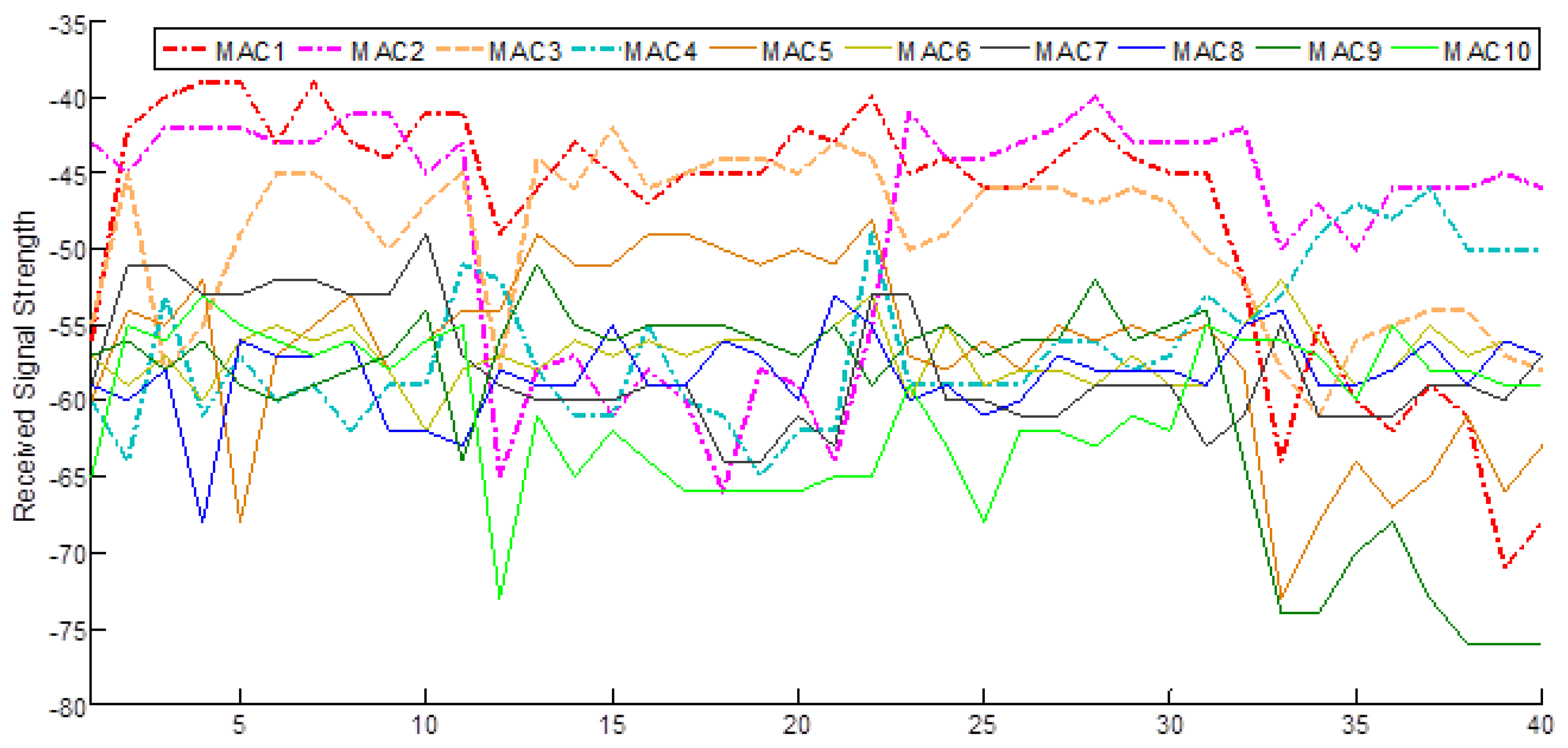
(1) Offline data acquisition and preprocessing



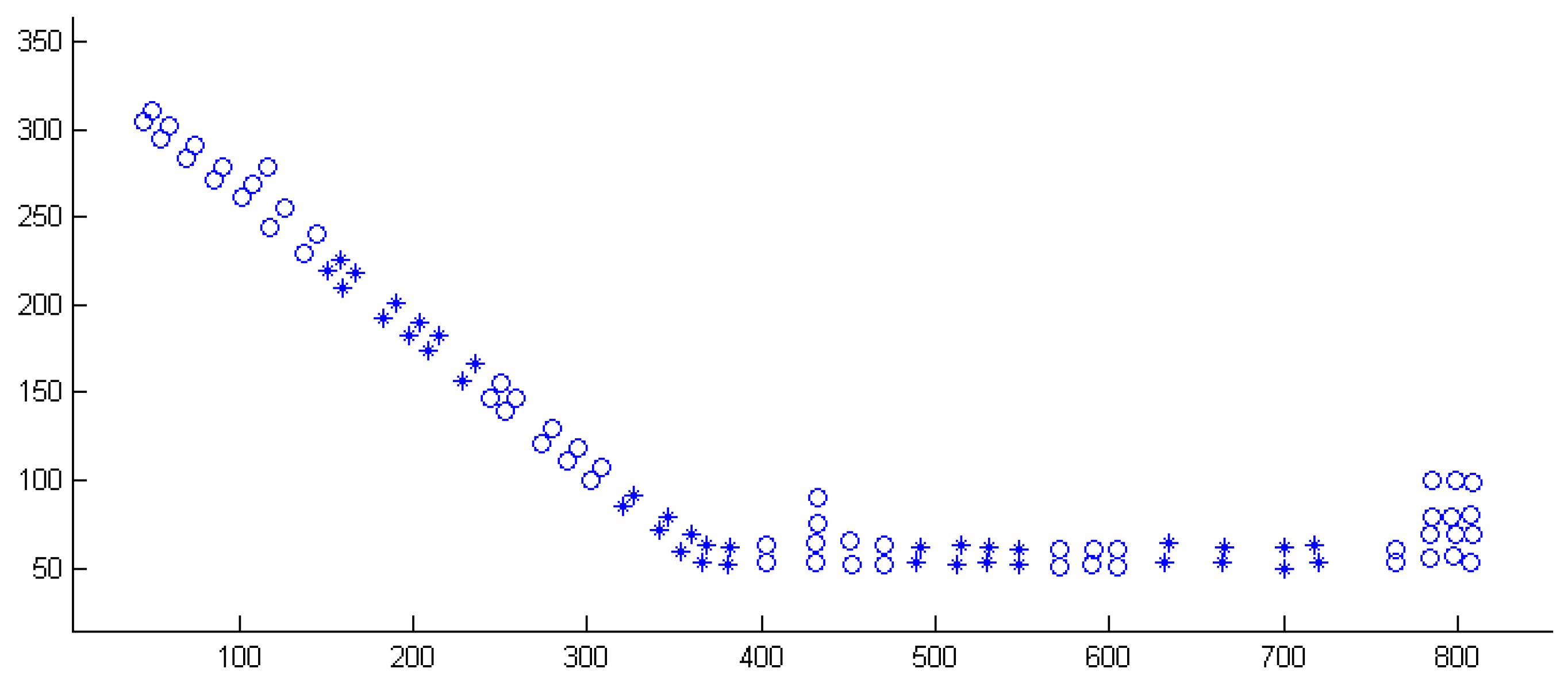
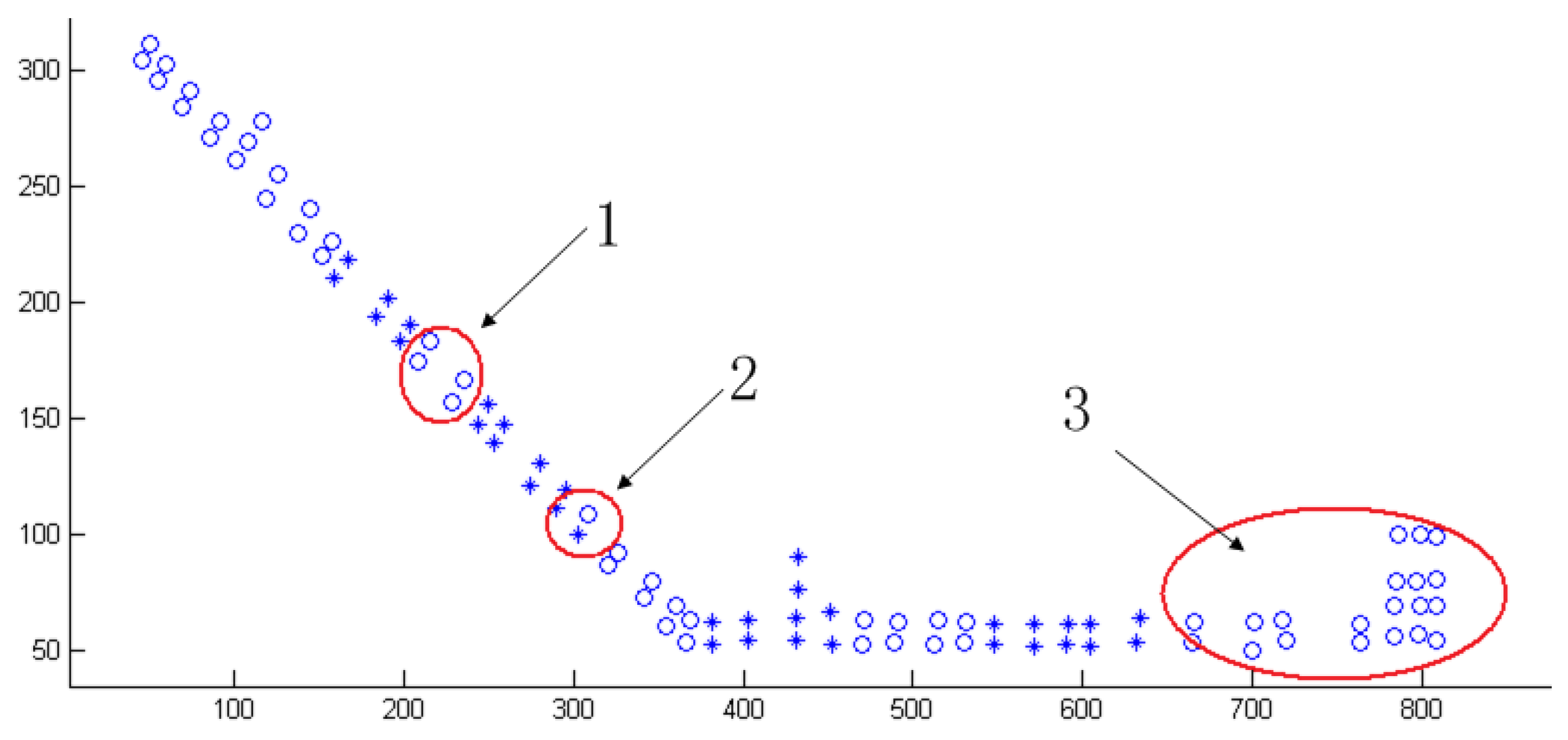
(2) Clustering analysis



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Times | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 17 | 15 | 10 | 7 | 6 | 8 | 10 | 11 | 9 |
| 2 | 17 | 15 | 10 | 7 | 9 | 15 | 8 | 3 | 9 |
| 3 | 17 | 6 | 10 | 12 | 10 | 8 | 10 | 11 | 9 |
| 4 | 11 | 6 | 6 | 10 | 9 | 7 | 9 | 15 | 20 |
| 5 | 8 | 9 | 6 | 10 | 12 | 10 | 8 | 10 | 20 |
| 6 | 17 | 6 | 10 | 9 | 7 | 9 | 15 | 11 | 9 |
| 7 | 17 | 6 | 10 | 9 | 7 | 6 | 8 | 10 | 20 |
| 8 | 9 | 9 | 14 | 10 | 7 | 9 | 15 | 11 | 9 |
| 9 | 8 | 9 | 6 | 10 | 12 | 10 | 18 | 11 | 9 |
| 10 | 32 | 13 | 10 | 8 | 10 | 8 | 3 | 5 | 4 |
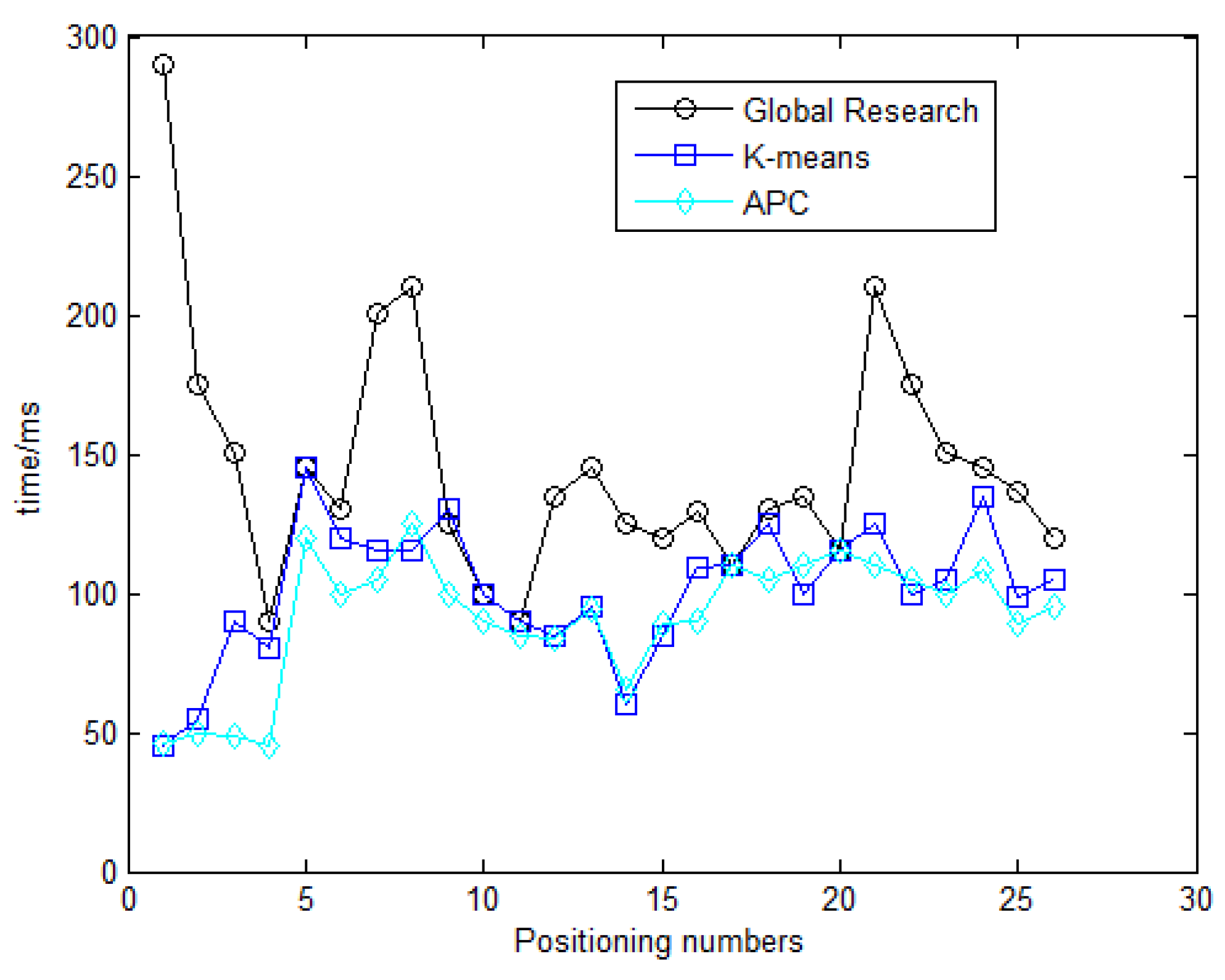
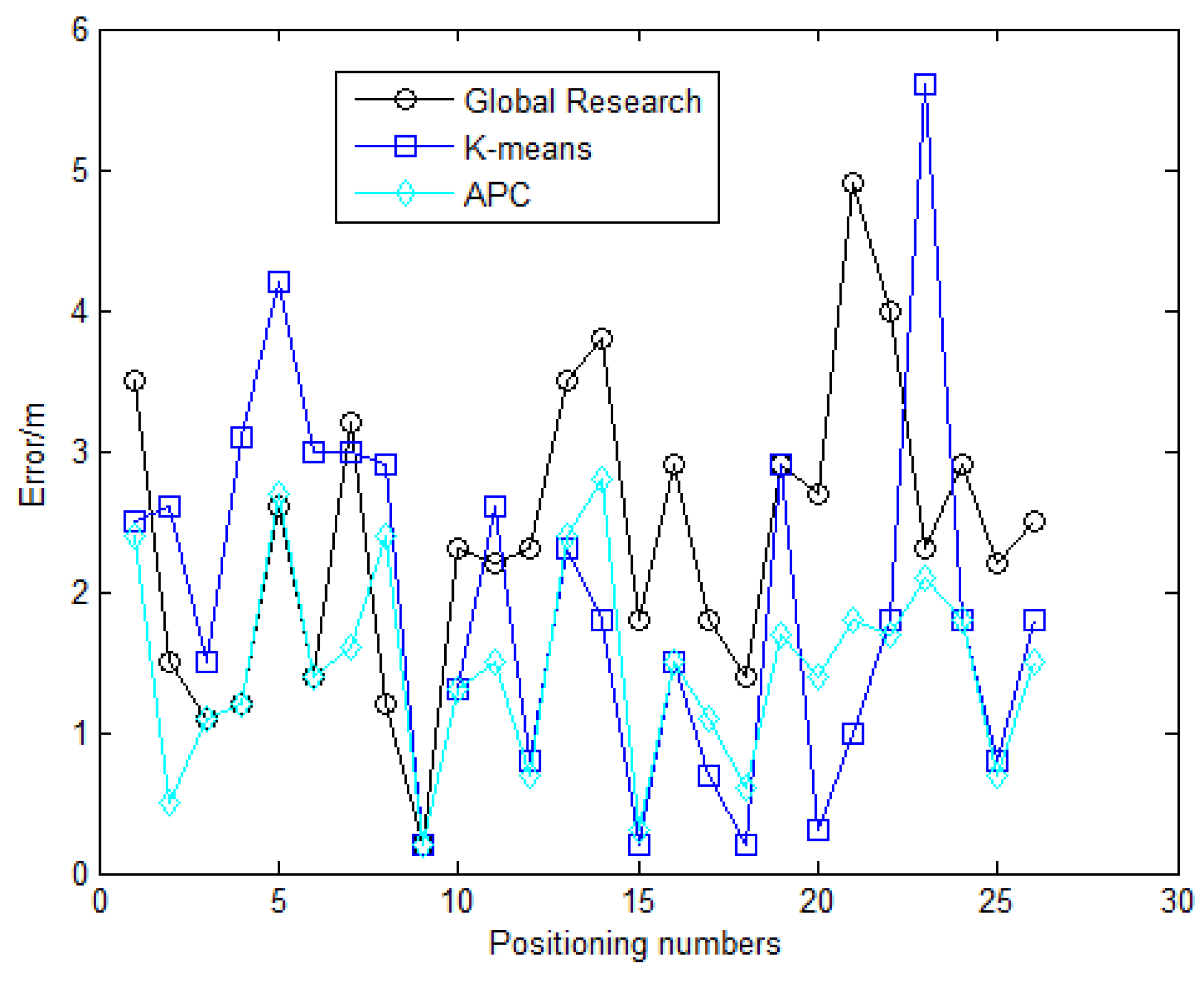
(3) Analysis results of static positioning


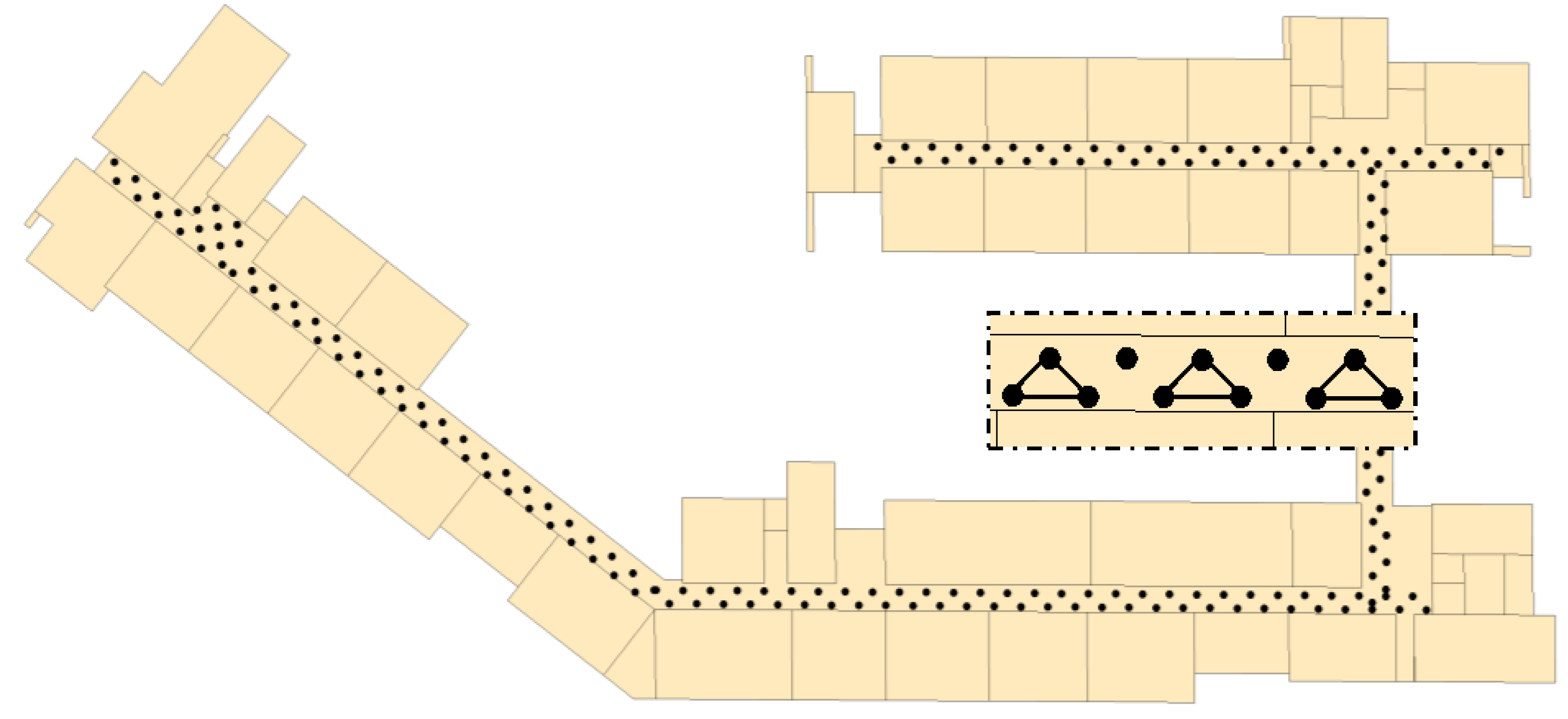
(4) Triangle mesh structure of fingerprint points

| Quadrilateral fingerprint database | Triangle fingerprint database | |
|---|---|---|
| Average error of static positioning / m | 1.50 | 1.76 |
| Maximum error of static positioning / m | 2.80 | 3.52 |
| Average error of dynamic positioning / m | 4.09 | 4.43 |
| Maximum error of dynamic positioning / m | 19.76 | 22.4 |
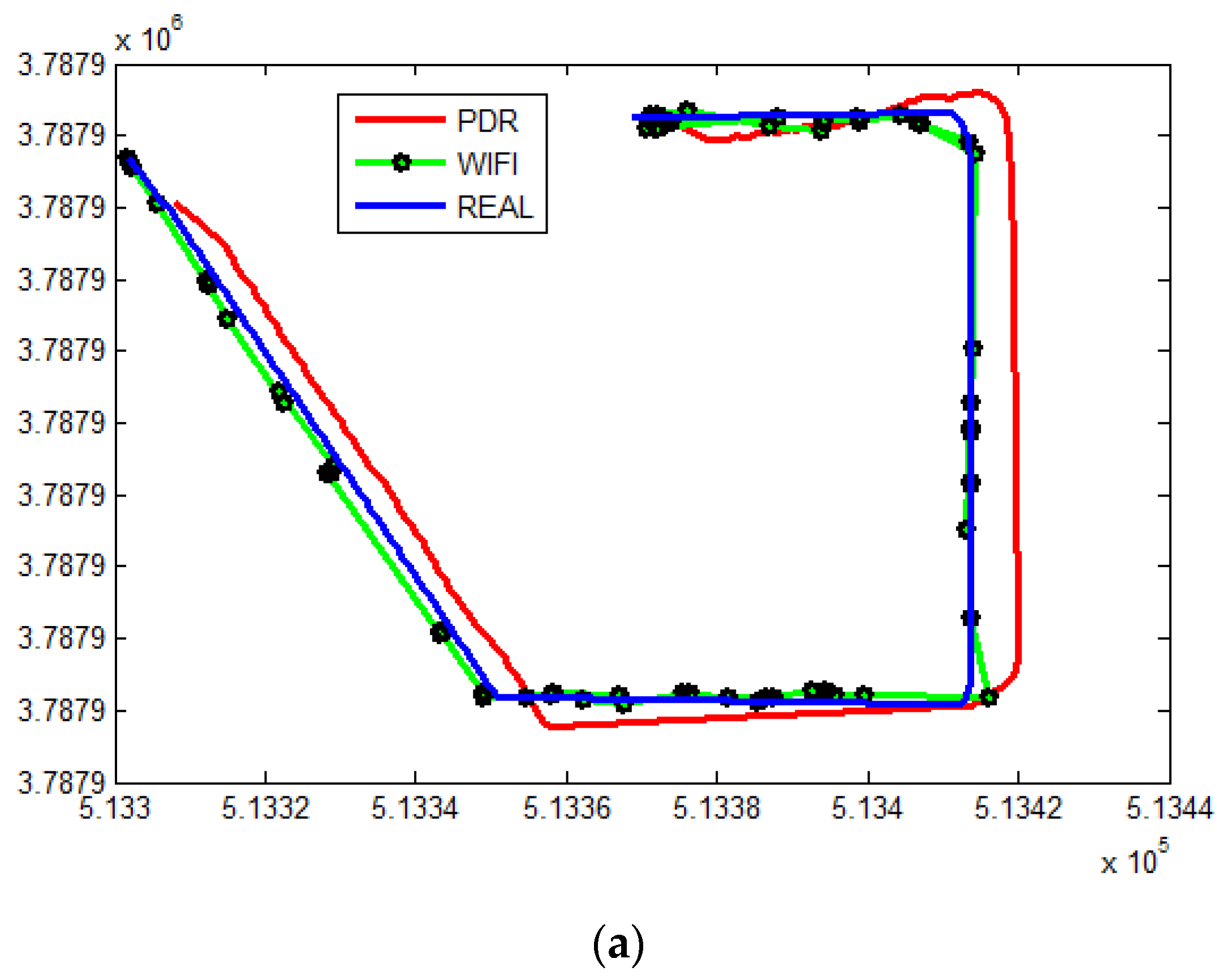
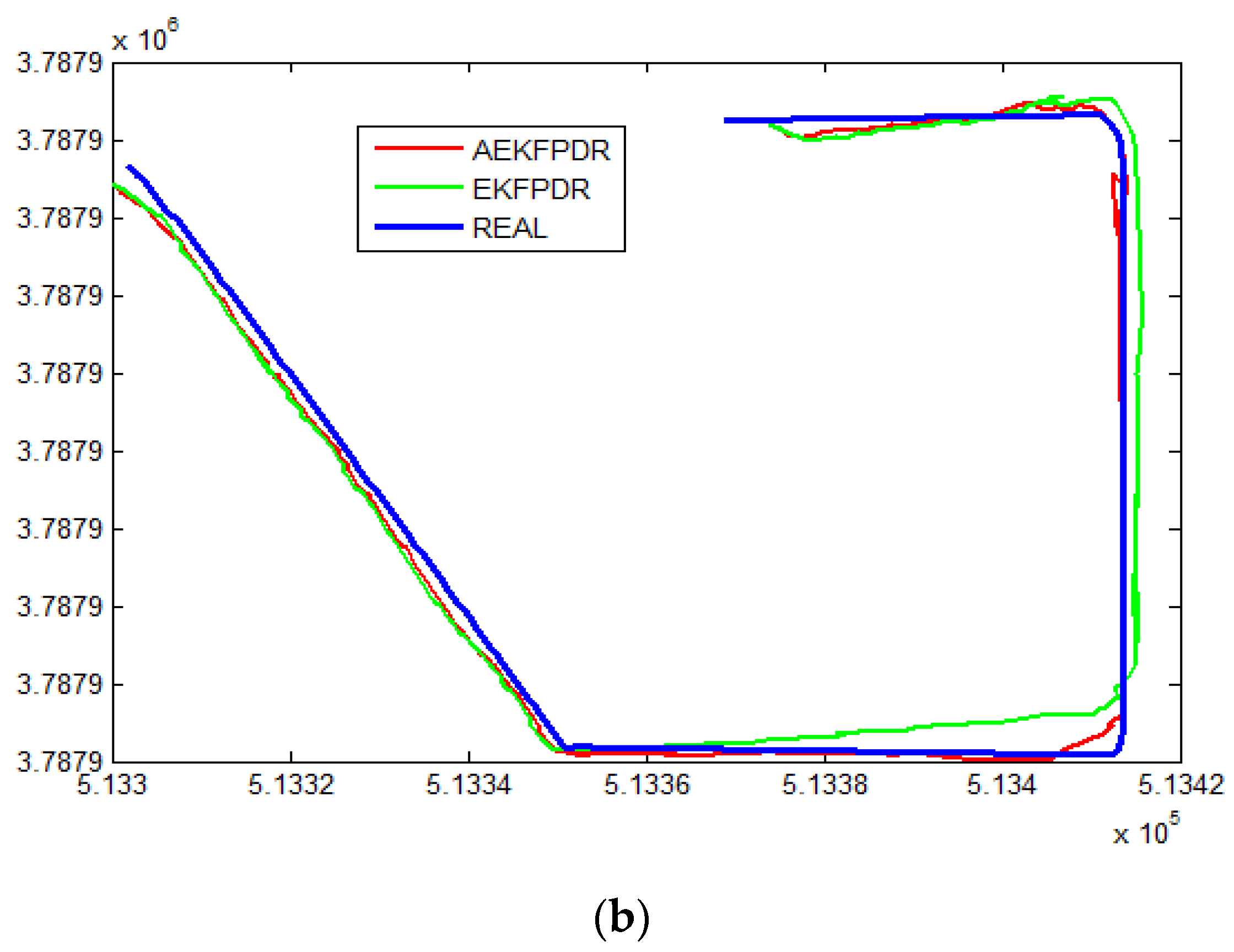
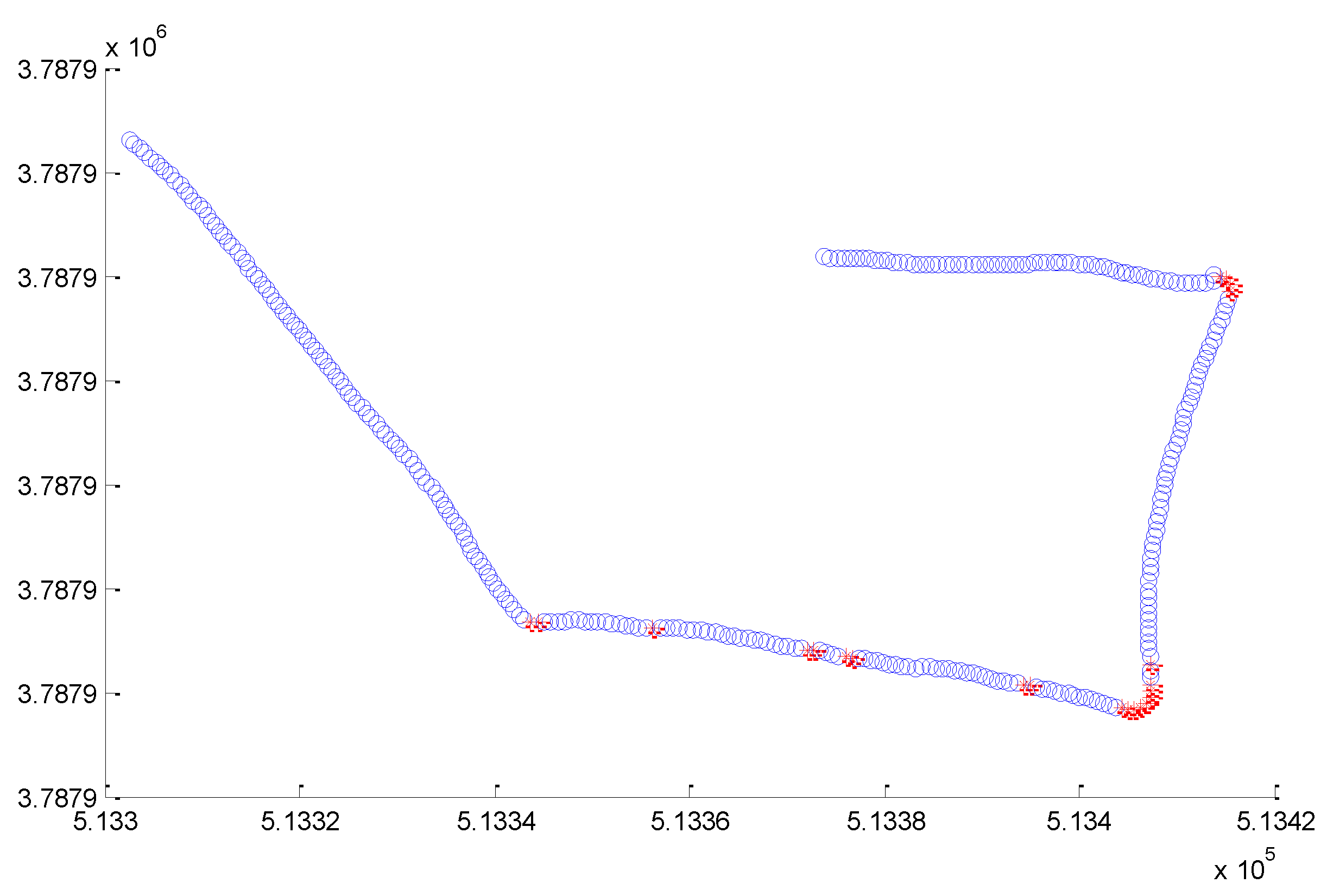
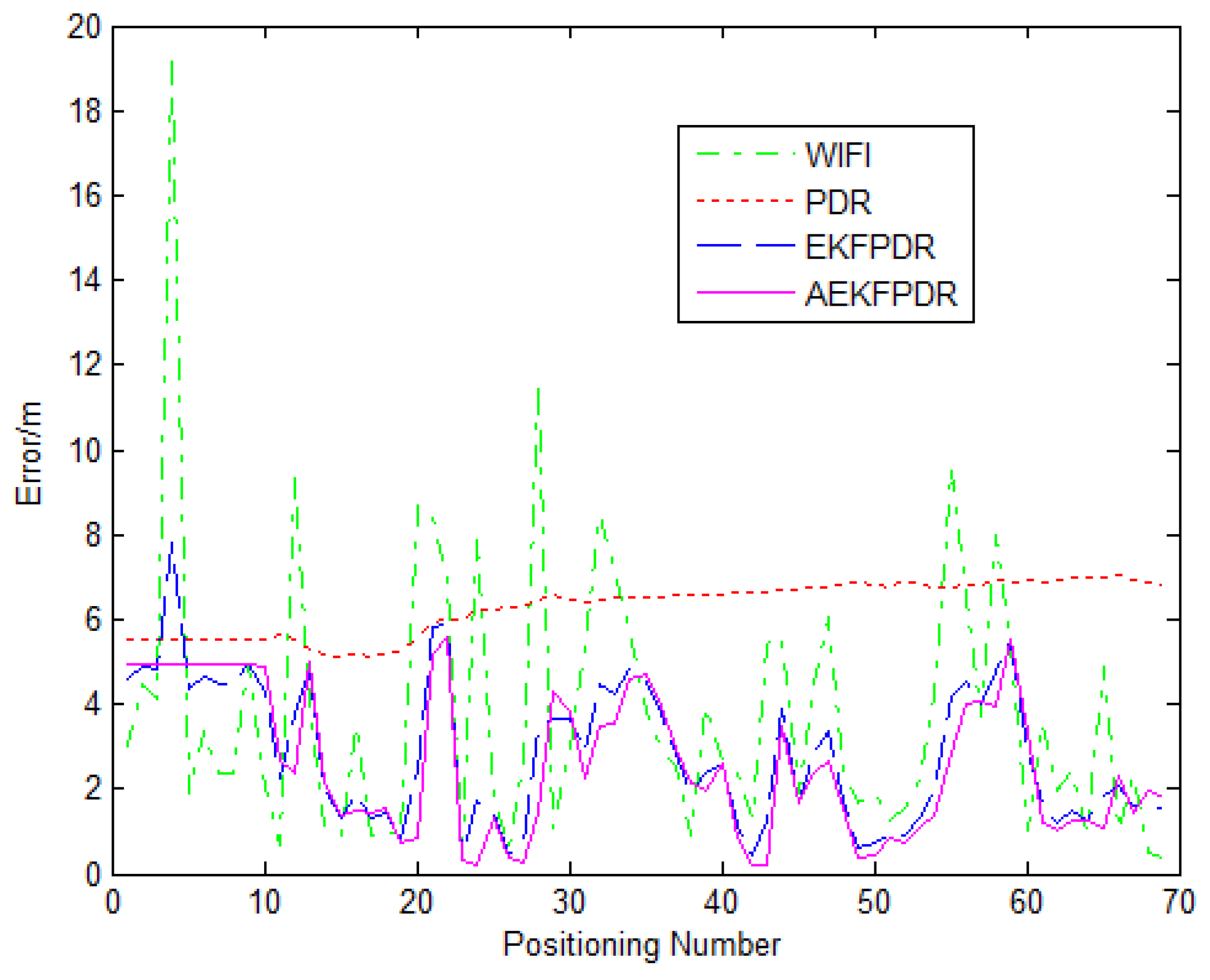
4.2. Fusion Analysis





| Wi-Fi | PDR | WEPDR | AWEPDR | |
|---|---|---|---|---|
| Minimum error/m | 0.36 | 5.14 | 0.28 | 0.22 |
| Average error/m | 4.09 | 6.08 | 2.74 | 2.32 |
| Maximum error/m | 19.35 | 6.46 | 7.96 | 5.25 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mahfouz, M.R.; Kuhn, M.J.; To, G.; Fathy, A.E. Integration of UWB and wireless pressure mapping in surgical navigation. IEEE Trans. Microw. Theory Tech. 2009, 57, 2550–2564. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Hightower, J.; Borriello, G. Location systems for ubiquitous computing. Computer 2001, 34, 57–66. [Google Scholar] [CrossRef]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A reliable and accurate indoor localization method using phone inertial sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 421–430.
- Pahlavan, K.; Li, X.; Makela, J.-P. Indoor geolocation science and technology. IEEE Commun. Mag. 2002, 40, 112–118. [Google Scholar] [CrossRef]
- Jimenez, A.; Seco, F.; Prieto, C.; Guevara, J. A comparison of pedestrian dead-reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 37–42.
- Mautz, R. The challenges of indoor environments and specification on some alternative positioning systems. In Proceedings of the 6th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 19 March 2009; pp. 29–36.
- Marano, S.; Gifford, W.M.; Wymeersch, H.; Win, M.Z. NLOS identification and mitigation for localization based on uwb experimental data. IEEE J. Sel. Areas Commun. 2010, 28, 1026–1035. [Google Scholar] [CrossRef]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Colomar, D.S.; Nilsson, J.; Handel, P. Smoothing for Zupt-aided INSS. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012; pp. 1–5.
- Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU. In Proceedings of the 7th Workshop on Positioning Navigation and Communication, Dresden, Germany, 8 June 2010; pp. 135–143.
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Ruiz, A.R.J.; Granja, F.S.; Prieto Honorato, J.C.; Rosas, J.I.G. Accurate pedestrian indoor navigation by tightly coupling foot-mounted IMU and RFID measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef]
- Adams, D. Introduction to inertial navigation. J. Navig. 1956, 9, 249–259. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Zampella, F.; Seco, F. Improving inertial pedestrian dead-reckoning by detecting unmodified switched-on lamps in buildings. Sensors 2014, 14, 731–769. [Google Scholar] [CrossRef] [PubMed]
- Widyawan; Pirklb, G.; Munarettoc, D.; Fischerd, C.; Ane, C.; Lukowiczb, P.; Klepalf, M.; Timm-Gielg, A.; Widmerh, J.; Pesch, D.; et al. Virtual lifeline: Multimodal sensor data fusion for robust navigation in unknown environments. Pervasive Mob. Comput. 2012, 8, 388–401. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. WiFi-aided magnetic matching for indoor navigation with consumer portable devices. Micromachines 2015, 6, 747–764. [Google Scholar] [CrossRef]
- Masiero, A.; Guarnieri, A.; Pirotti, F.; Vettore, A. A particle filter for smartphone-based indoor pedestrian navigation. Micromachines 2014, 5, 1012–1033. [Google Scholar] [CrossRef]
- Ghinamo, G.; Corbi, C.; Francini, G.; Lepsoy, S.; Lovisolo, P.; Lingua, A.; Aicardi, I. The MPEG7 visual search solution for image recognition based positioning using 3D models. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014.
- Saeedi, S.; Moussa, A.; El-Sheimy, N. Context-aware personal navigation using embedded sensor fusion in smartphones. Sensors 2014, 14, 5742–5767. [Google Scholar] [CrossRef] [PubMed]
- Ling, P.; Chen, R.; Liu, J. Using Inquiry-based bluetooth RSSI probability distributions for indoor positioning. J. Glob. Position. Syst. 2010, 9, 122–130. [Google Scholar]
- Youssef, M.A.; Agrawala, A.; Shankar, A.U.; Noh, S.H. A Probabilistic Clustering-Based Indoor Location Determination System. Available online: http://www.cs.umd.edu/~moustafa/papers/locdet_tr.pdf (accessed on 23 April 2015).
- Yousseff, M.; Agrawala, A. Handling samples correlation in the Horus system. In Proceedings of the 23rd Annual Joint Conference of the IEEE Computer and Communications Societies, Hong Kong, China, 7–11 March 2004.
- Yousseff, M.; Agrawala, A. Location determination via clustering and probability distributions. Pervasive Comput. Commun. 2003, 8, 143–150. [Google Scholar]
- Shin, B.; Lee, J.H.; Lee, T.; Kim, H.S. Enhanced weighted K-nearest neighbor algorithm for indoor Wi-Fi positioning systems. In Proceedings of the 8th International Conference on Computing Technology and Information Management (ICCM), Seoul, South Korea, 24–26 April 2012.
- Kuo, S.P. Cluster-enhances techniques for pattern-matching localization systems. Mob. Ad-Hoc Sens. Syst. 2007, 7, 1–9. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the 9th Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784.
- Klingbeil, L.; Wark, T. A wireless sensor network for real-time indoor localization and motion monitoring. In Proceedings of the 7th International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA, 22–24 April 2008; pp. 39–50.
- Frey, B.J.; Dueck, D. Clustering by passing messages between data points. Science 2007, 315, 972–976. [Google Scholar] [CrossRef] [PubMed]
- Yu, F.; Jiang, M.; Liang, J. An indoor localization of WiFi based on branch-bound algorithm. In Proceedings of the 2014 International Conference on Information Science, Electronics and Electrical Engineering (ISEEE), Sapporo, Japan, 26–28 April 2014; pp. 1306–1308.
- Song, L.; Hatzinakos, D. A cross-layer architecture of wireless sensor networks for target tracking. IEEE/ACM Trans. Netw. 2007, 15, 145–158. [Google Scholar] [CrossRef]
- Cho, S.Y.; Park, C.G. MEMS based pedestrian navigation system. J. Navig. 2006, 6, 135–153. [Google Scholar] [CrossRef]
- Klepal, M.; Beauregard, S. A backtracking particle filter for fusing building plans with PDR displacement estimates. In Proceedings of the 5th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 27 March 2008; pp. 207–212.
- Chen, G.; Meng, X.; Wang, Y.; Zhang, Y.; Tian, P.; Yang, H. Integrated WiFi/PDR/Smartphone using an unscented Kalman Filter algorithm for 3D indoor localization. Sensors 2015, 15, 24595–24614. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Chen, R.; Chen, Y.; Kuusniemi, H.; Wang, J.; Fu, Z. An effective pedestrian dead reckoning algorithm using a unified heading error model. In Proceedings of the 2010 IEEE/ION Position Location and Navigation Symposium (PLANS), Indian Wells, CA, USA, 4–6 May 2010; pp. 340–347.
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Wang, J.; Liu, C.; Zhang, L.; Li, Z. Integrated WiFi/PDR/Smartphone Using an Adaptive System Noise Extended Kalman Filter Algorithm for Indoor Localization. ISPRS Int. J. Geo-Inf. 2016, 5, 8. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5020008
Li X, Wang J, Liu C, Zhang L, Li Z. Integrated WiFi/PDR/Smartphone Using an Adaptive System Noise Extended Kalman Filter Algorithm for Indoor Localization. ISPRS International Journal of Geo-Information. 2016; 5(2):8. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5020008
Chicago/Turabian StyleLi, Xin, Jian Wang, Chunyan Liu, Liwen Zhang, and Zhengkui Li. 2016. "Integrated WiFi/PDR/Smartphone Using an Adaptive System Noise Extended Kalman Filter Algorithm for Indoor Localization" ISPRS International Journal of Geo-Information 5, no. 2: 8. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5020008