
A New Method of Gold Foil Damage Detection in Stone Carving Relics Based on Multi-Temporal 3D LiDAR Point Clouds


Abstract
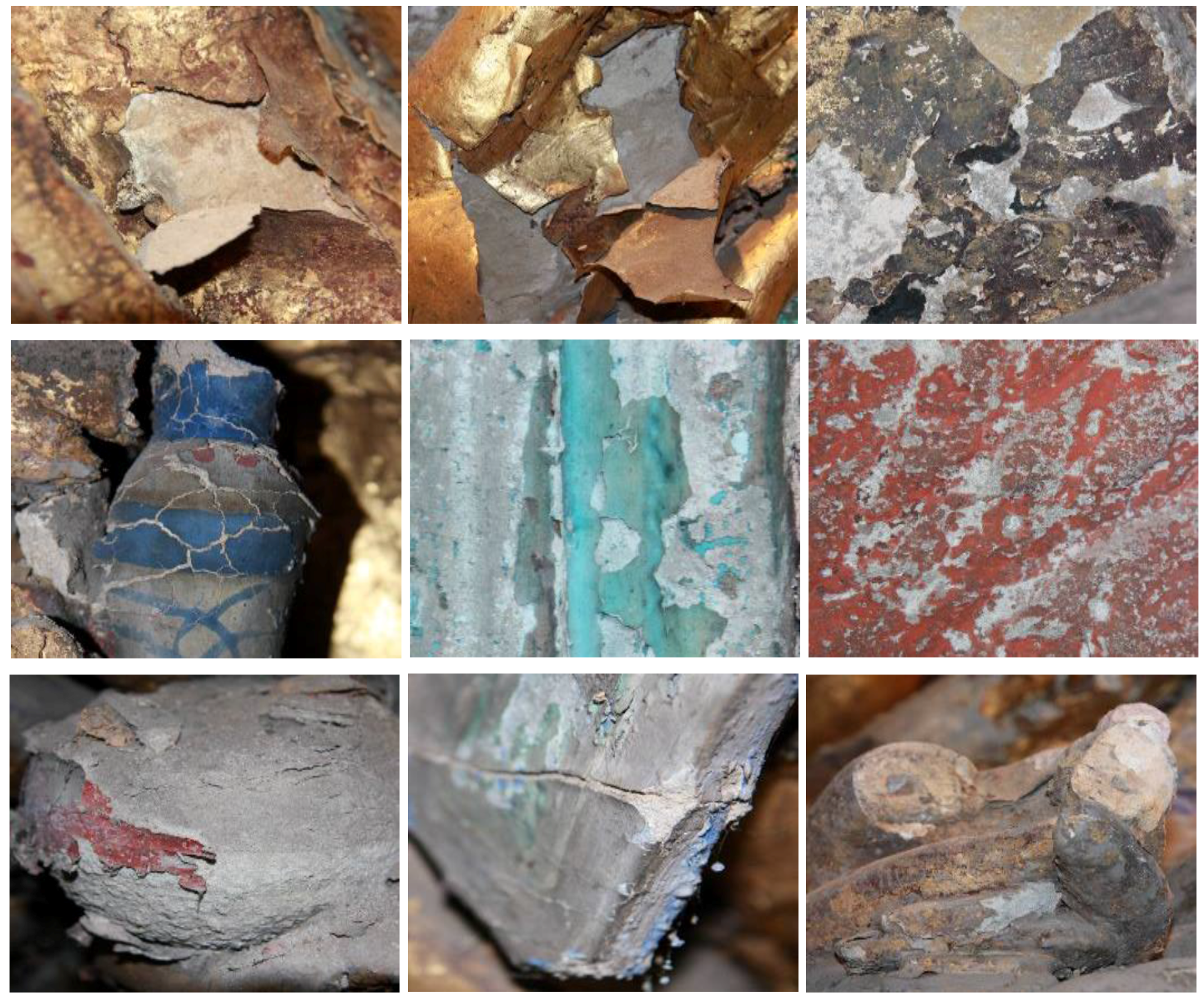
:1. Introduction
2. Study Method
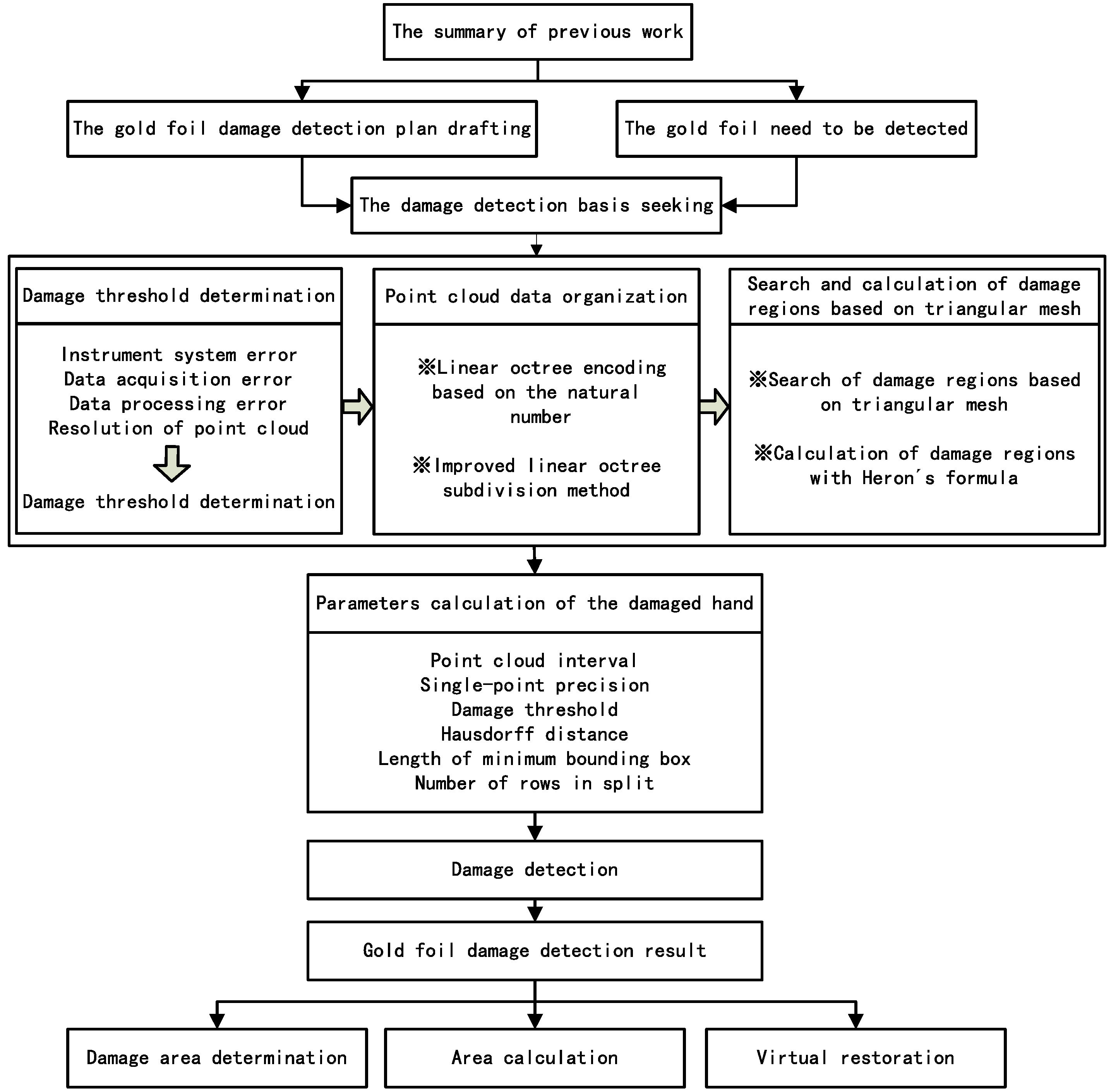
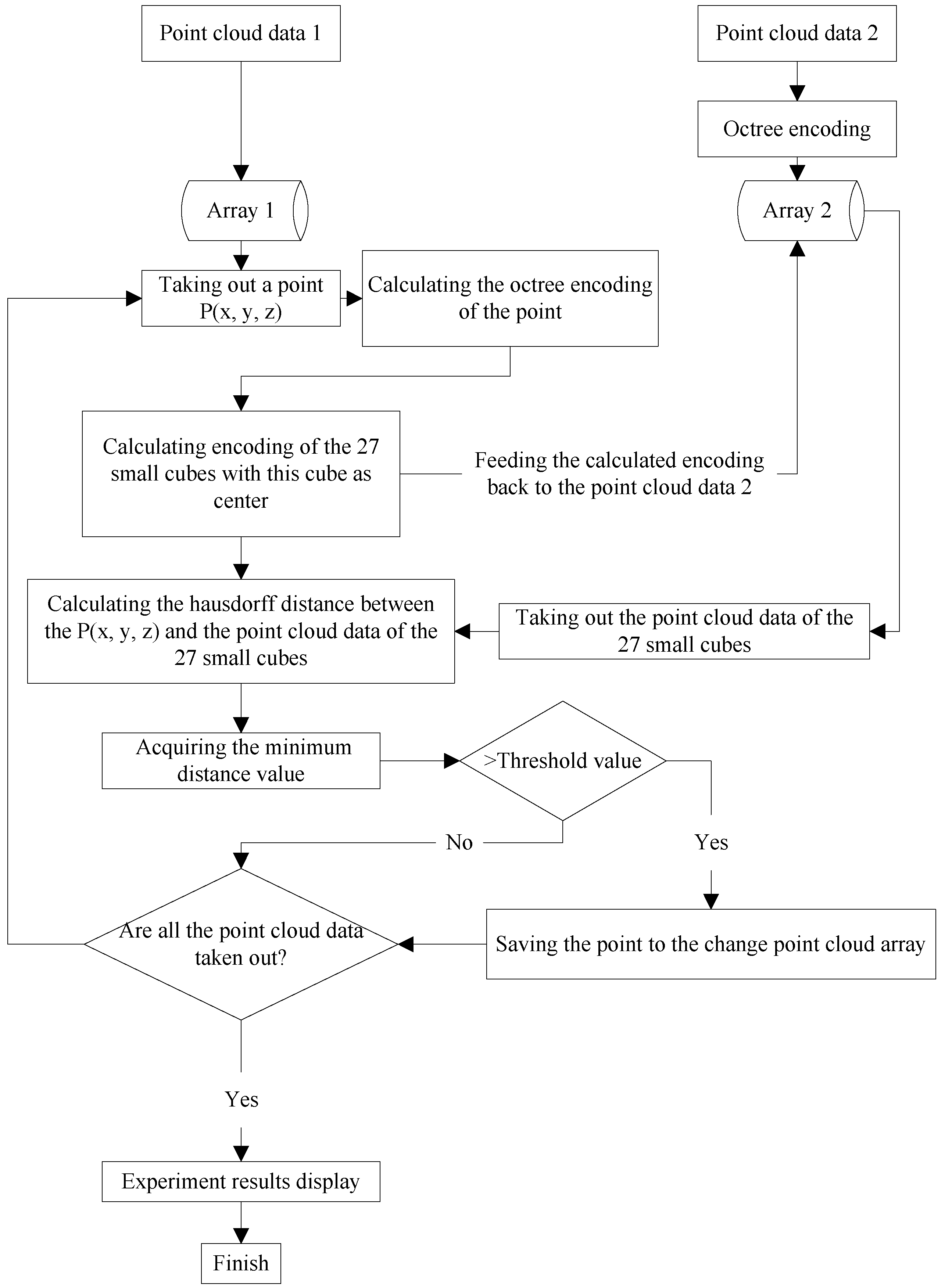
2.1. The Proposed Method
2.2. Gold Foil Damage Detection Based on an Improved Linear Octree
2.2.1. Damage Threshold Determination
(1) Error Analysis
(2) Damage Threshold Determination
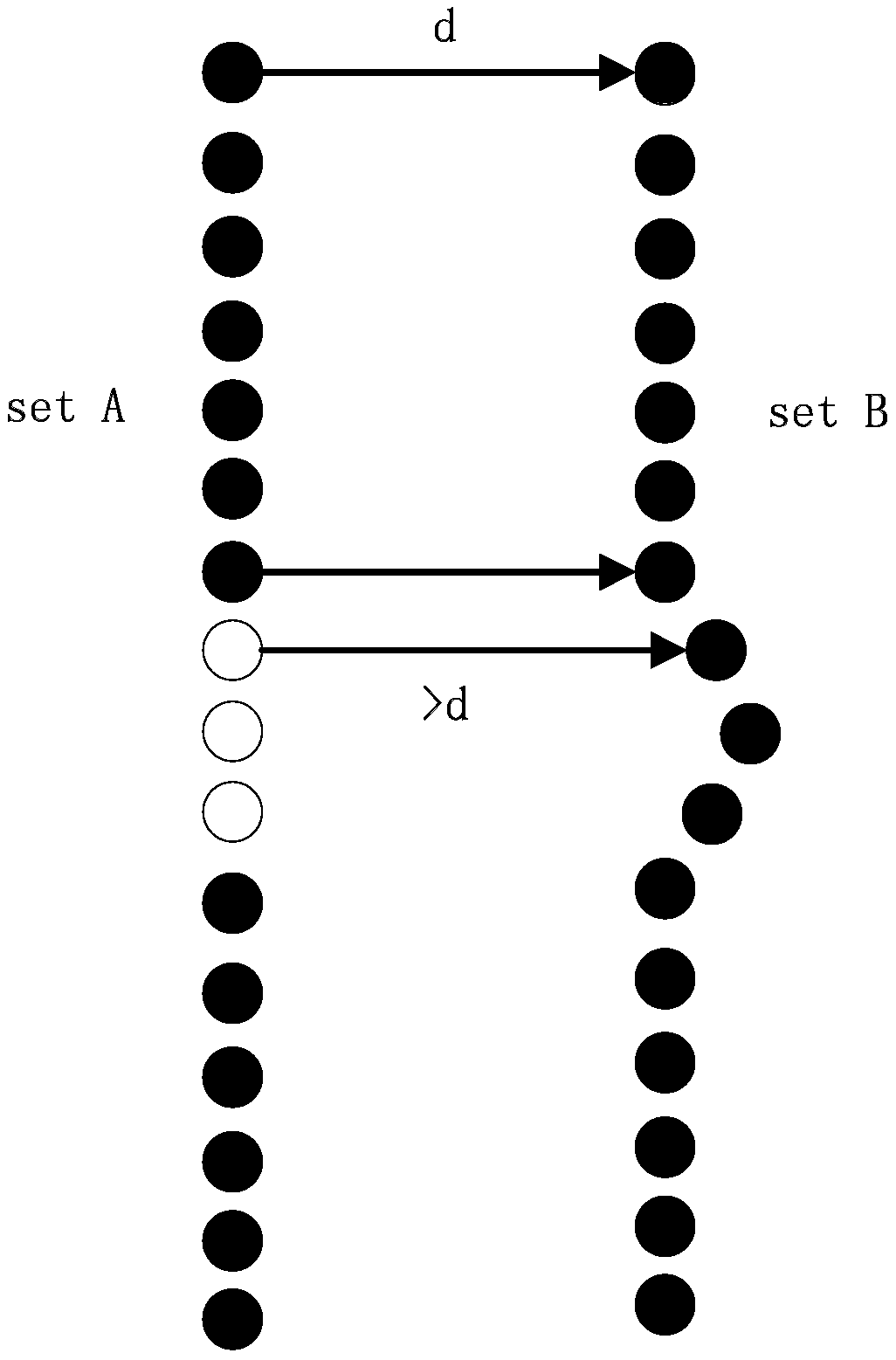
2.2.2. Partial Hausdorff Distance
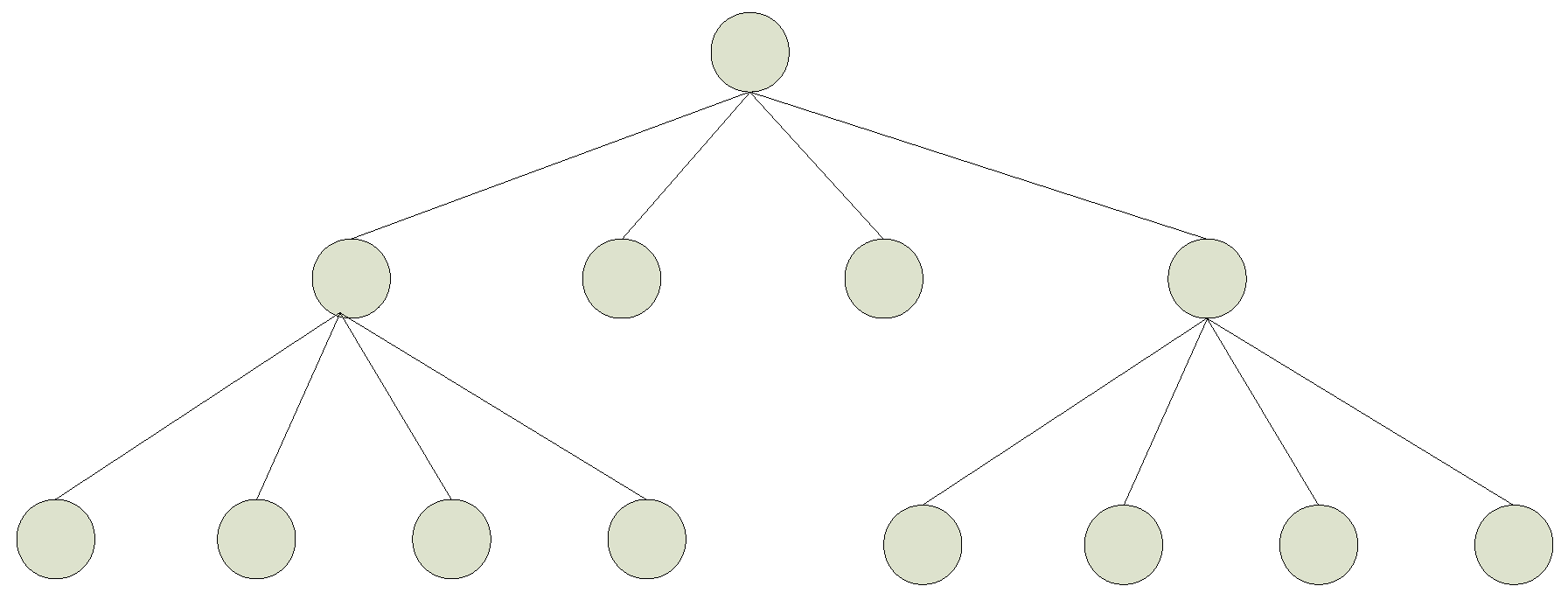
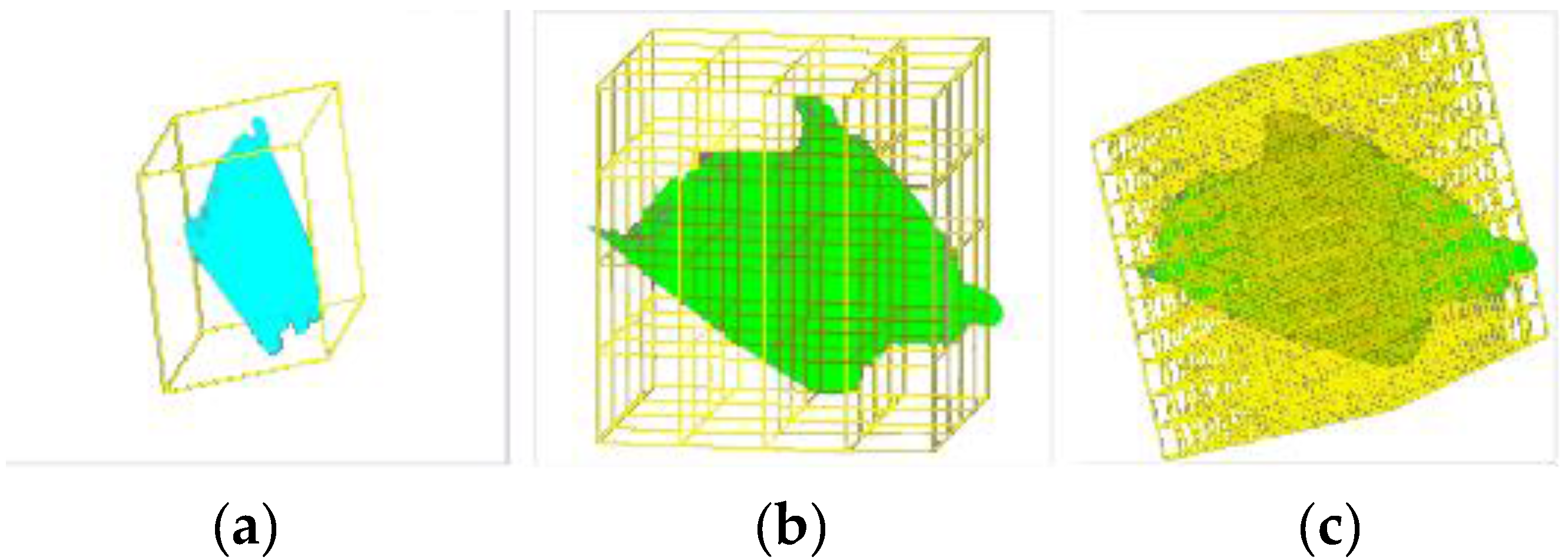
2.2.3. Point Cloud Data Organization Based on an Improved Linear Octree
(1) Linear octree subspace based on the natural number
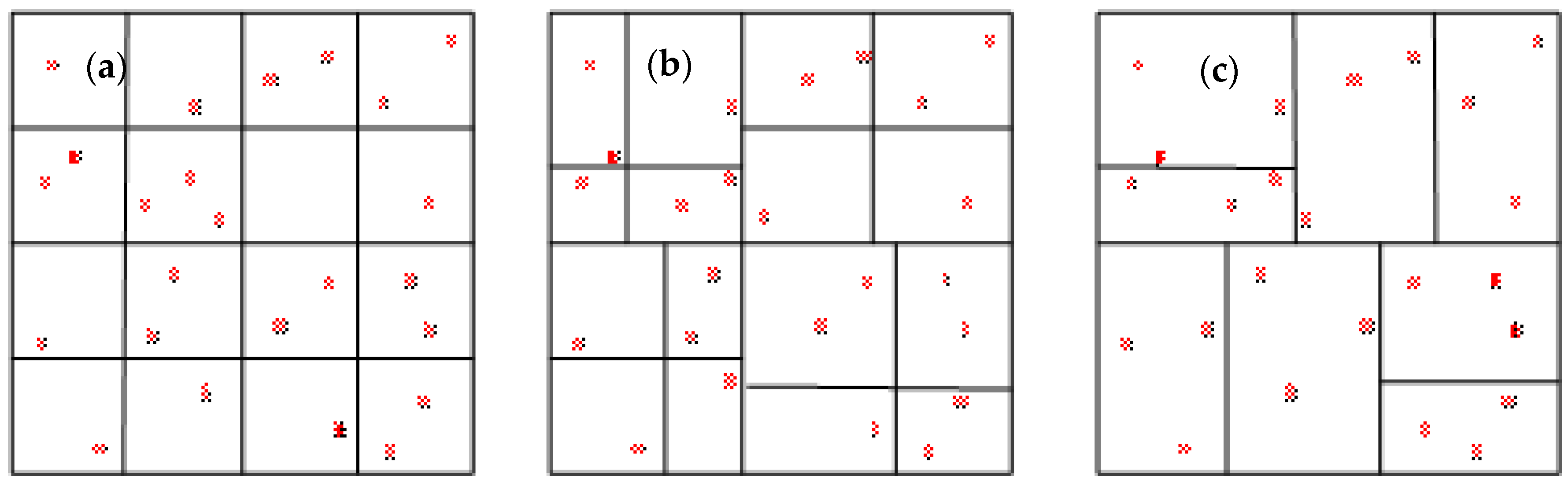
(2) An improved linear octree subdivision method
- (1)
- Compute the bounding box for the point cloud. This is the root of the linear octree. Suppose that L is the length of the bounding box, L can be determined by the following formula:L = Max(Xmax − Xmin, Ymax − Ymin, Zmax − Zmin)Then, select the point with the smallest coordinates as the starting point of the bounding box. The bounding box can then be expressed as (Xmin, Ymin, Zmin, L).
- (2)
- Calculate voxel length. A voxel, whose length is determined by splitting, is the smallest cube after segmentation. If the splitting number equals n, the voxel length can be calculated by the following formula:Pix=L/2n
- (3)
- Calculate decimal encoding for each point as their ID cards.
- (4)
- Count the number of decimal encoding values to acquire the nodes that are not empty by taking advantage of the map template for the STL (Standard Template Library) in C++.
- (5)
- Allocate memory for each node based on the number of nodes that exist.
- (6)
- Store the point clouds in the corresponding array, according to the point cloud IDs.
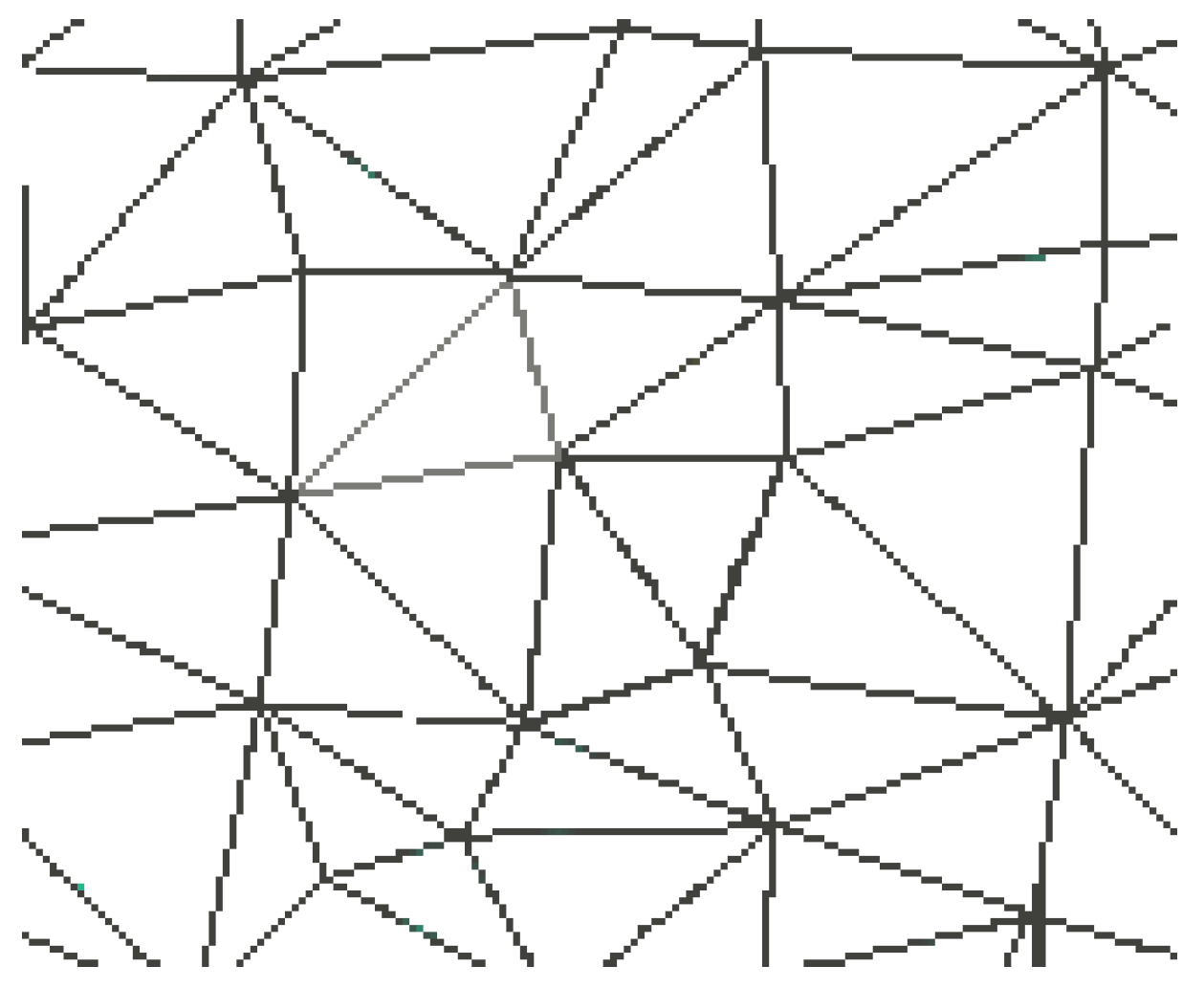
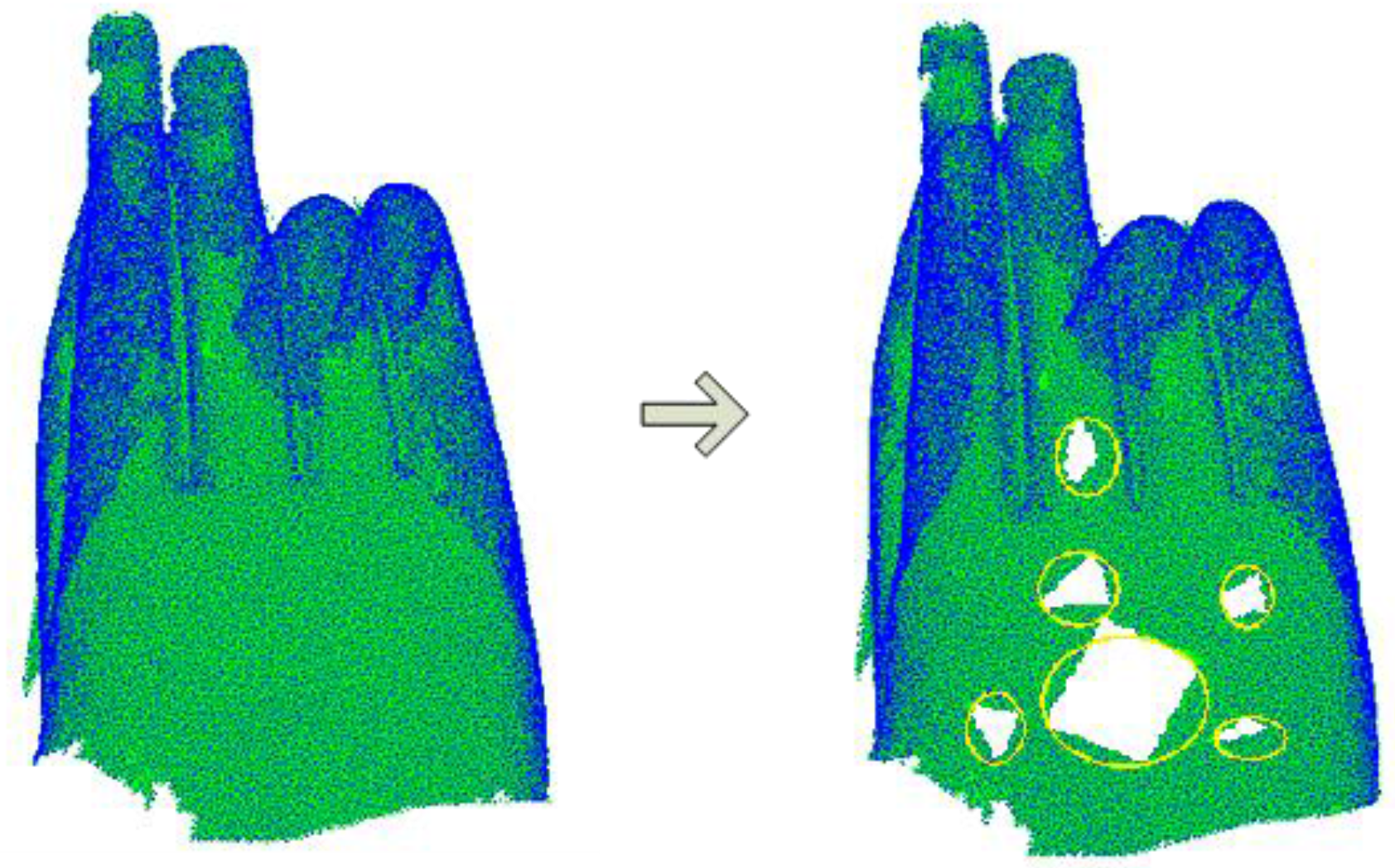
2.2.4. Search and Calculation of Damaged Regions Based on a Triangular Mesh
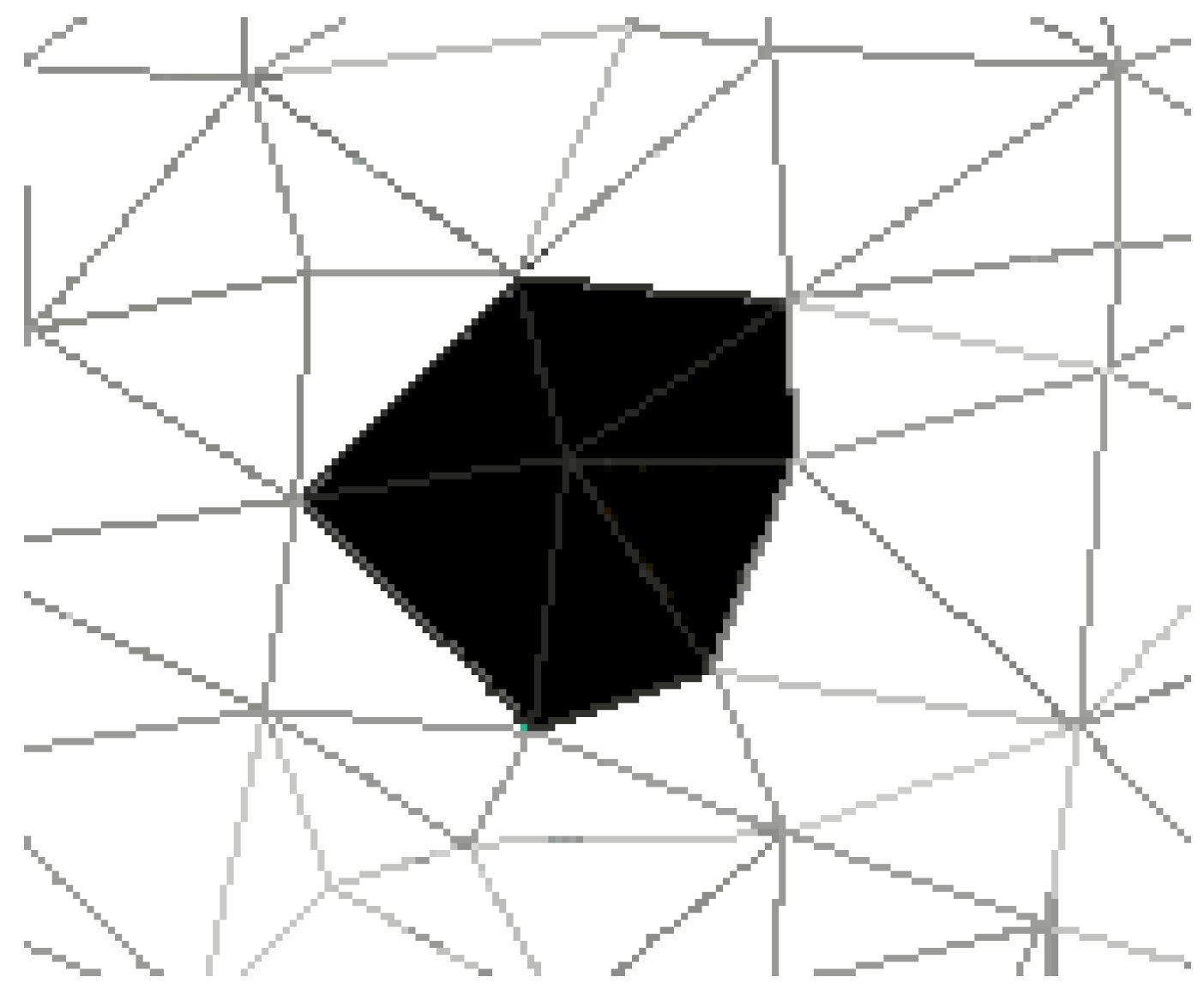
(1) Search of damaged regions based on a triangular mesh
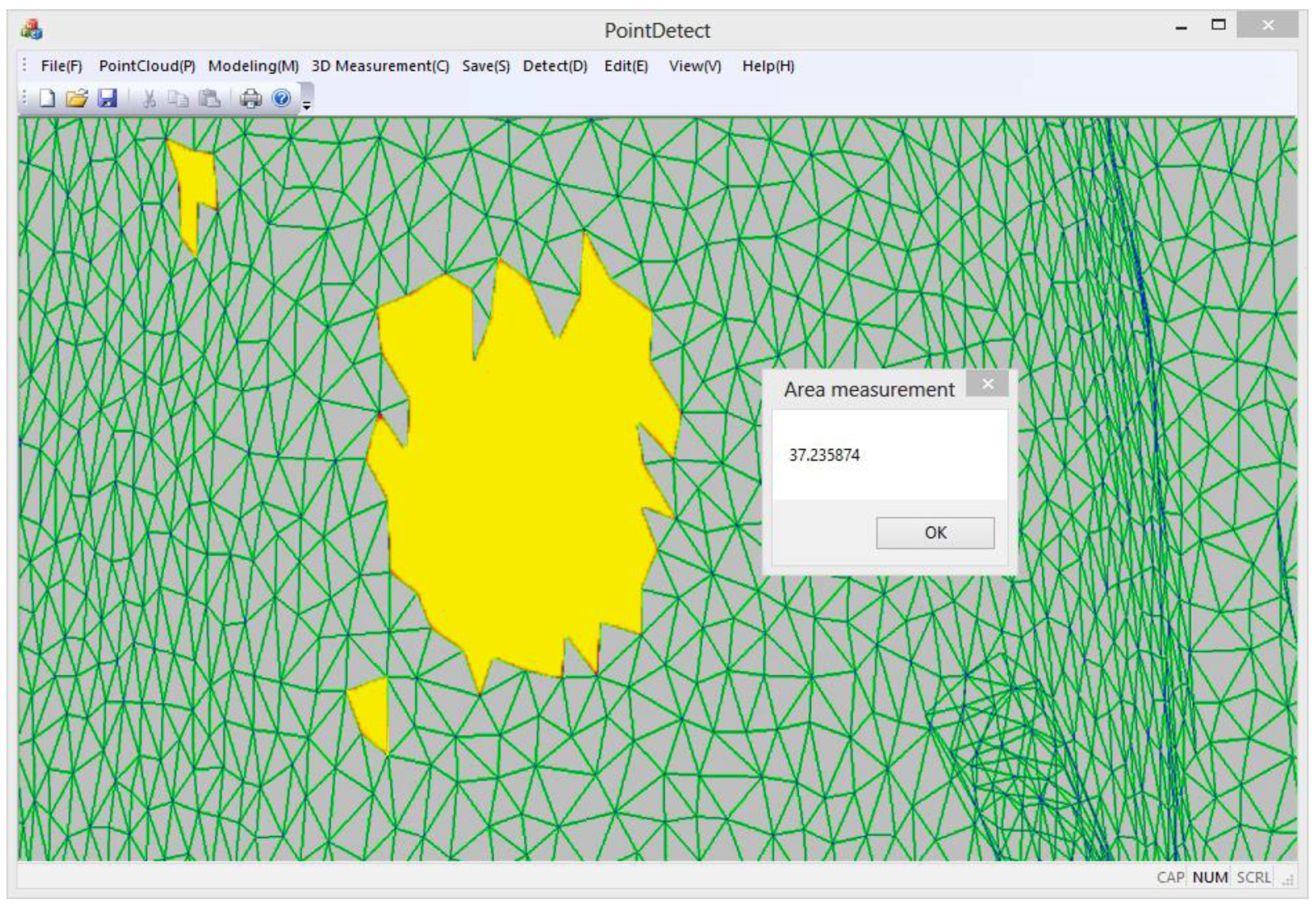
(2) Calculation of the damaged region based on a triangular mesh
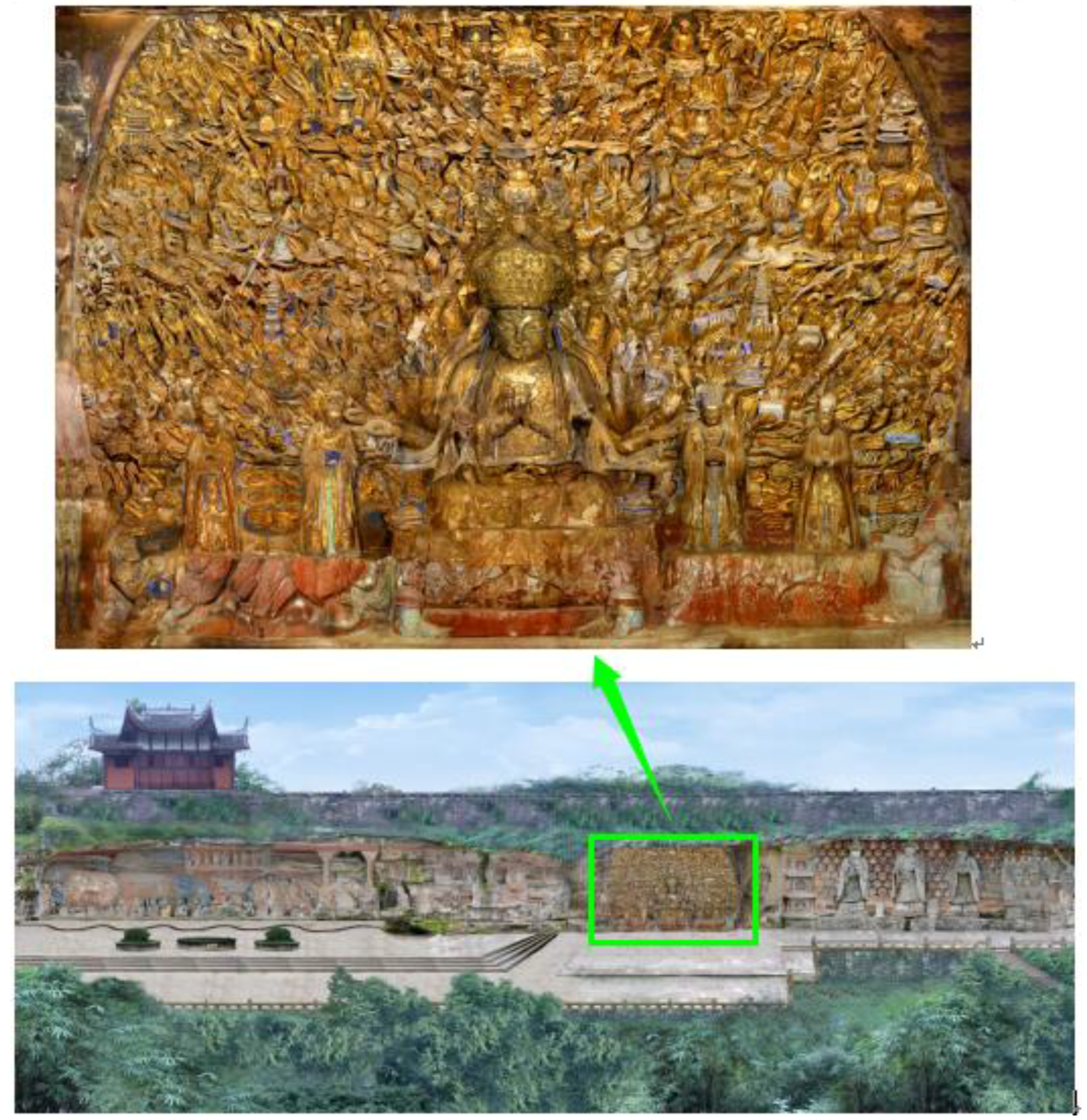
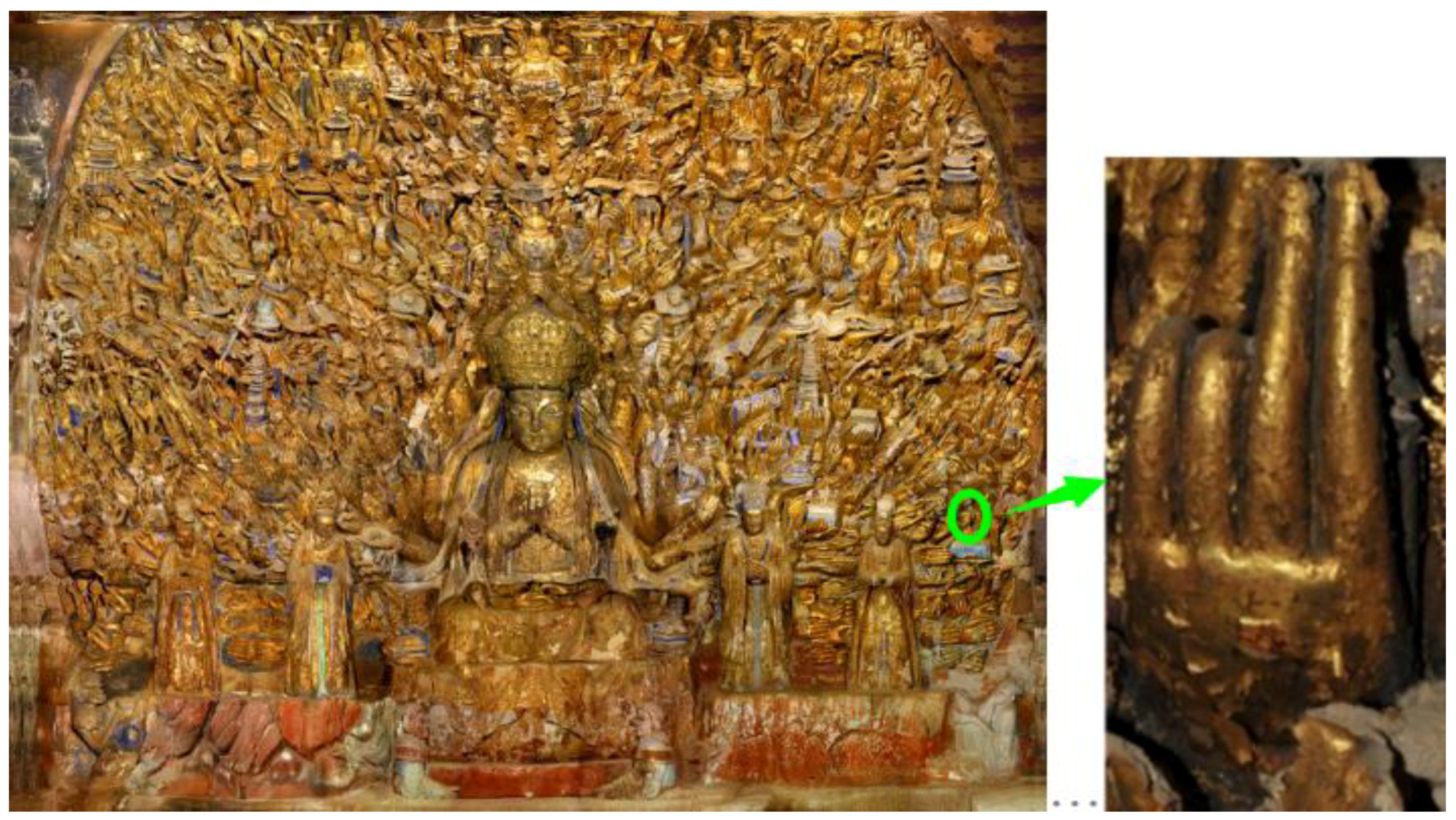
3. Research Area and Damage Detection
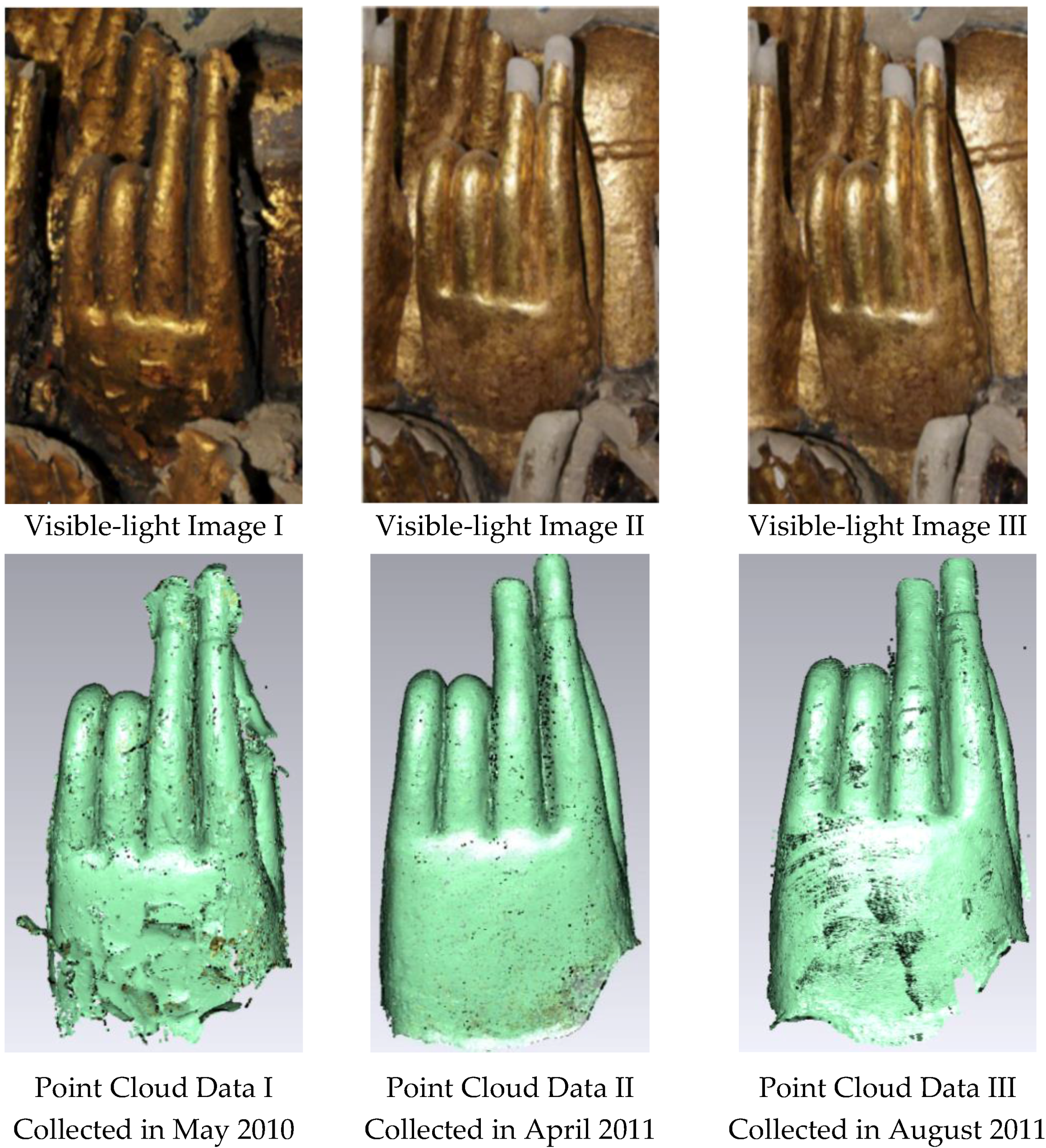
3.1. Experimental Data
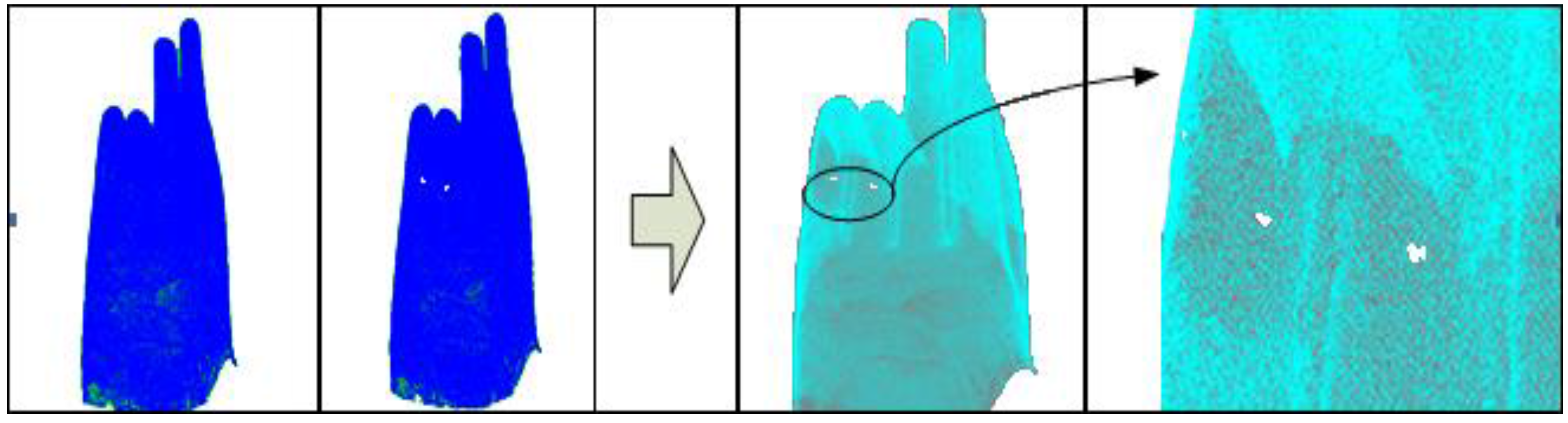
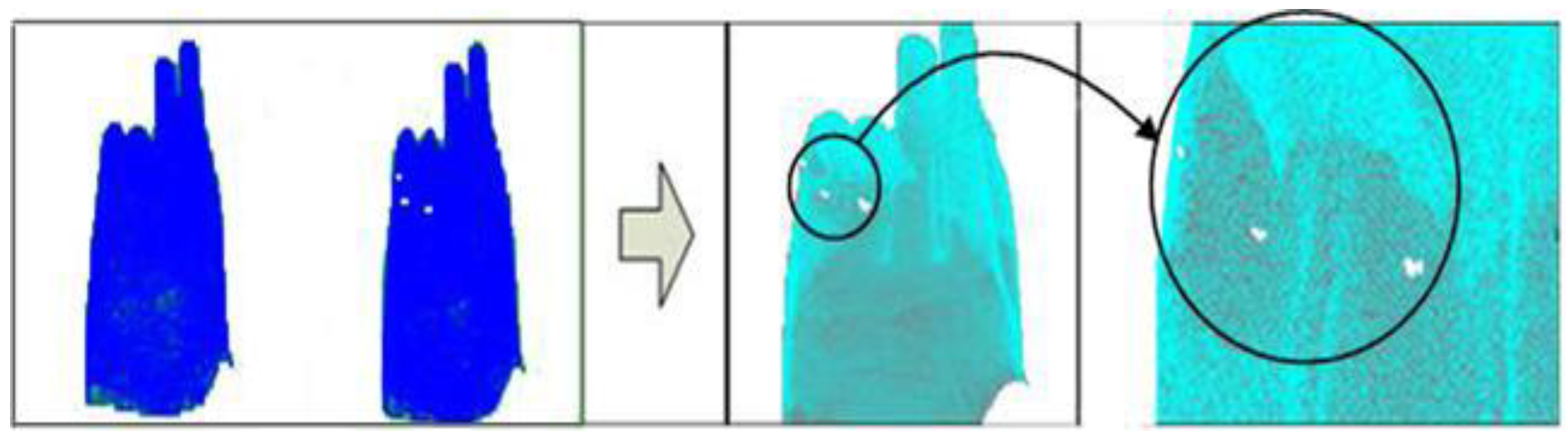
3.2. Damage Detection
4. Results
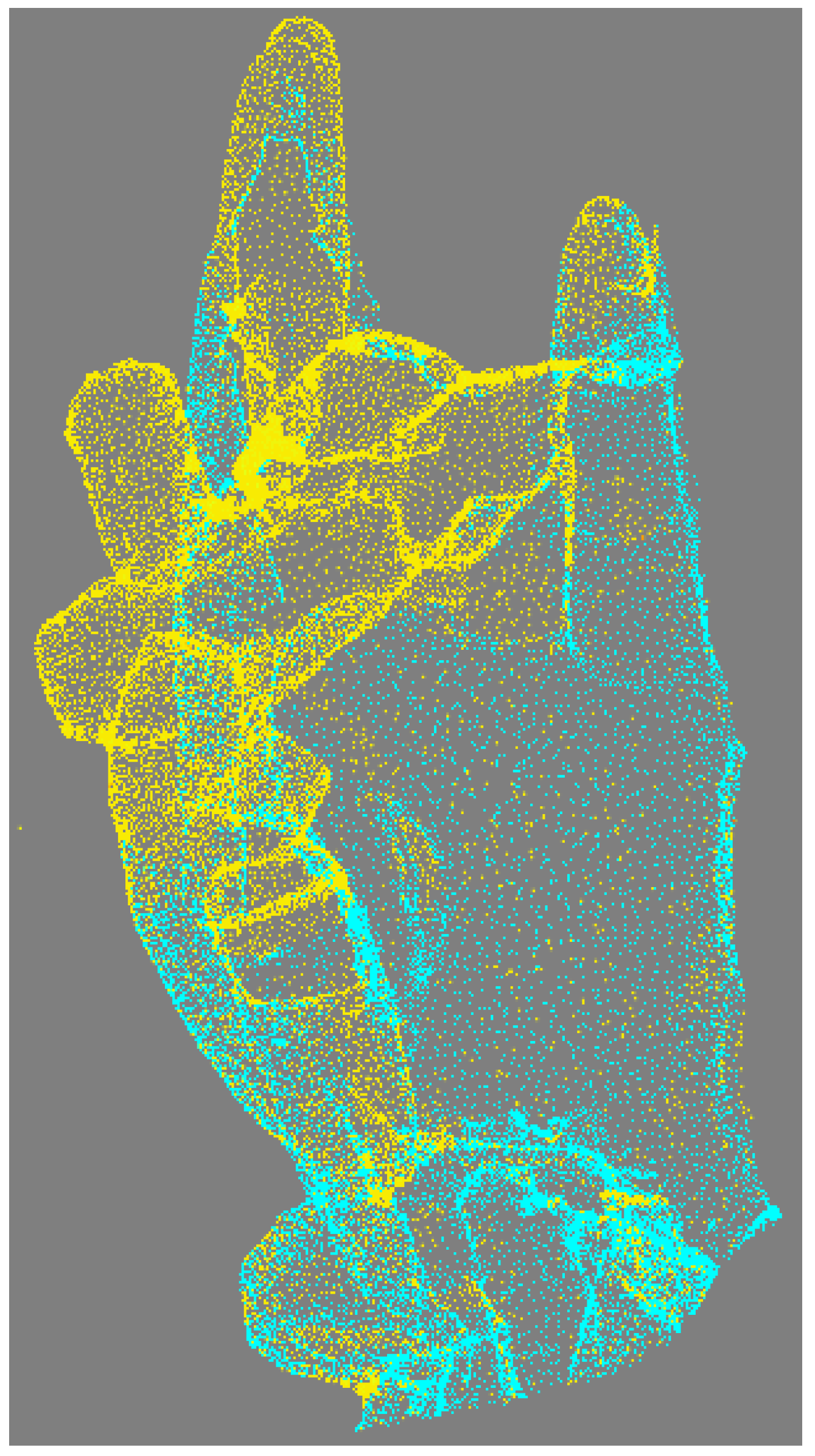
4.1. Damaged Area Determination
4.2. Area Calculation
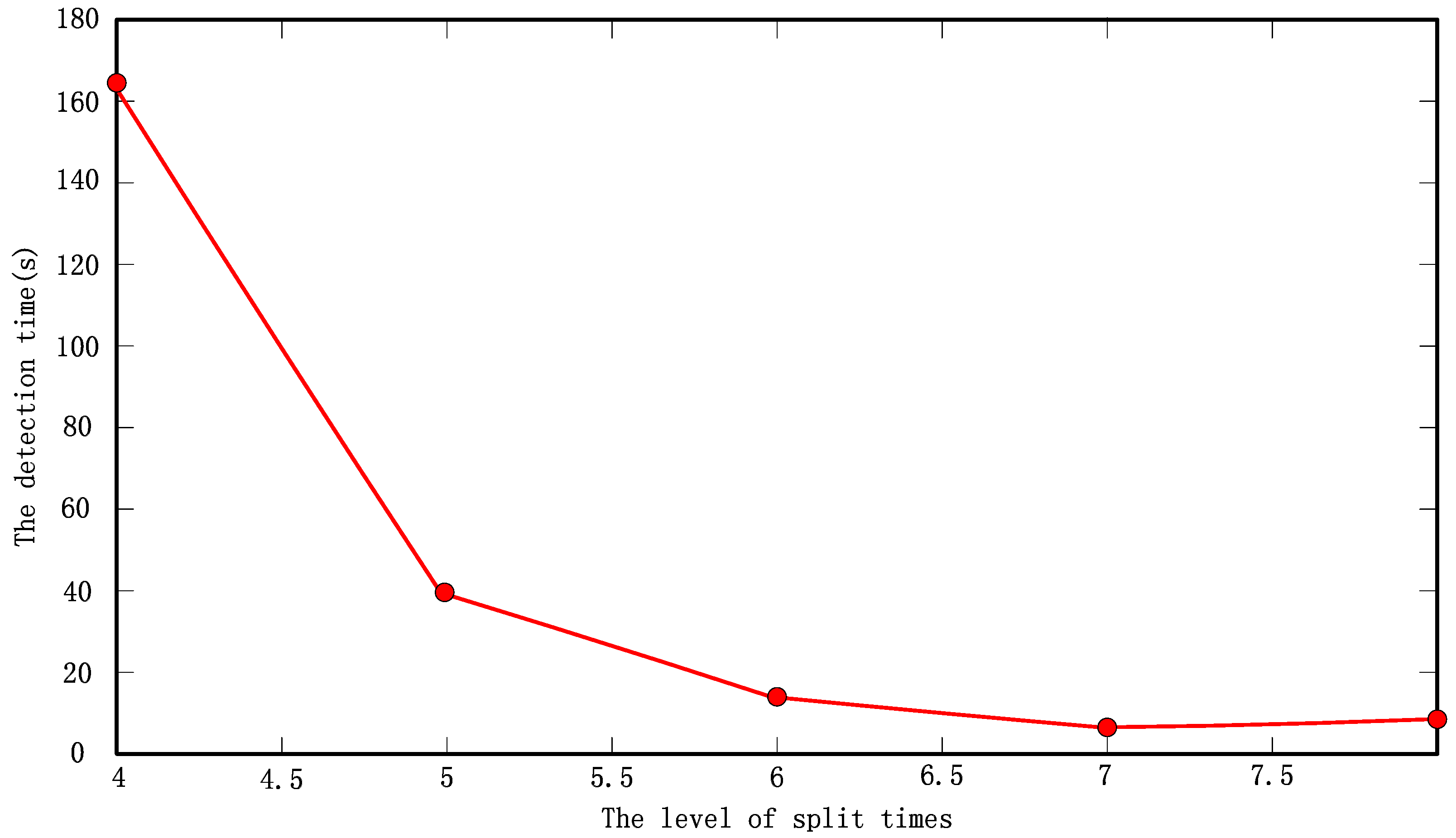
4.3. Retrieval Efficiency
5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, H.; Liu, Q.; Liu, T.; Zhang, B.J. The preservation damage of hydrophobic polymer coating materials in conservation of stone relics. Prog. Org. Coat. 2013, 76, 1127–1134. [Google Scholar] [CrossRef]
- Dellepiane, M.; Dell’Unto, N.; Callieri, M.; Lindgren, S.; Scopigno, R. Archeological excavation monitoring using dense stereo matching techniques. J. Cult. Herit. 2013, 14, 201–210. [Google Scholar] [CrossRef]
- Bitelli, G.; Girelli, V.A.; Marziali, M.; Zanutta, A. Use of historical images for the documentation and the metrical study of cultural heritage by means of digital photogrammetric techniques. In Proceedings of the CIPA XXI Symposium, Athens, Greece, 1–6 October 2007.
- Yastikli, N. Documentation of cultural heritage using digital photogrammetry and laser scanning. J. Cult. Herit. 2007, 8, 423–427. [Google Scholar] [CrossRef]
- Pesci, A.; Boschi, E.; Galli, C.; Boschi, E. Laser scanning and digital imaging for the investigation of an ancient building: Palazzo d’Accursio study case (Bologna, Italy). J. Cult. Herit. 2012, 13, 215–220. [Google Scholar] [CrossRef]
- Pesci, A.; Casula, G.; Boschi, E. Laser scanning the Garisenda and Asinelli towers in Bologna (Italy): Detailed deformation patterns of two ancient leaning buildings. J. Cult. Herit. 2011, 12, 117–127. [Google Scholar] [CrossRef] [Green Version]
- Pesci, A.; Teza, G.; Bonali, E.; Casula, G.; Boschi, E. A laser scanning-based method for fast estimation of seismic-induced building deformations. ISPRS J. Photogramm. Remote Sens. 2013, 79, 185–198. [Google Scholar] [CrossRef]
- Perroy, R.L.; Bookhagen, B.; Asner, G.P.; Chadwick, O.A. Comparison of gully erosion estimates using airborne and ground-based LiDAR on Santa Cruz Island, California. Geomorphology 2010, 118, 288–300. [Google Scholar] [CrossRef]
- Chen, B.Q.; Deng, K.Z.; Fan, H.D.; Hao, M. Large-scale deformation monitoring in mining area by D-InSAR and 3D laser scanning technology integration. Int. J. Min. Sci. Technol. 2013, 23, 555–561. [Google Scholar] [CrossRef]
- Girardeau-Montaut, D.; Roux, M.; Marc, R.; Thibault, G. Change detection on point cloud data acquired with a ground laser scanner. In Proceedings of the ISPRS Workshop “Laser scanning 2005”, Enschede, The Netherlands, 12–14 September 2005; pp. 30–35.
- Wawrzyniec, T.F.; McFadden, L.D.; Ellwein, A.L.; Grant, M.; Louis, S.; Joe, M.; Peter, F. Chronotopographic analysis directly from point-cloud data: A method for detecting small, seasonal hillslope change, Black Mesa Escarpment, NE Arizona. Geosphere 2007, 3, 550–567. [Google Scholar] [CrossRef]
- Lv, Z.; Kang, Z.Z. Change detection of buildings based on terrestrial laser scanning data. Geomat. Inf. Sci. Wuhan Univ. 2011, 36, 1284–1289. [Google Scholar]
- Wu, Y.H.; Hou, M.L.; Zhang, Y.M. Application of 3D laser scanning technique in the conservation of geotechnical cultural relics in China. In Proceedings of the 2011 Second International Conference on Digital Manufacturing & Automation (ICDMA), Zhangjiajie, China, 5–7 August 2011.
- Yüceer, H.; İpekoğlu, B. An architectural assessment method for new exterior additions to historical building. J. Cult. Herit. 2012, 13, 419–425. [Google Scholar] [CrossRef]
- Arbacea, L.; Sonninob, E.; Callieri, M.; Dellepiance, M.; Fabbri, M.; Idelson, A.L.; Scopigno, R. Innovative uses of 3D digital technologies to assist the restoration of a fragmented terracotta statue. J. Cult. Herit. 2013, 14, 332–345. [Google Scholar] [CrossRef]
- Gonzalez-Aguilera, D.; Muñoz, A.L.; Lahoz, J.G.; Herrero, J.S.; Corchón, M.S.; Carcía, E. Recoding and modeling Paleolithic caves through laser scanning. In Proceedings of the 2009 International Conference on Advanced Geographic Information System & Web Services (GEOWS), Cancún, Mexico, 1–7 February 2009.
- Bremer, M.; Rutzinger, M.; Wichmann, V. Derivation of tree skeletons and error assessment using LiDAR point cloud data of varying quality. ISPRS J. Photogramm. Romote Sens. 2013, 80, 39–50. [Google Scholar] [CrossRef]
- Abbas, M.; Ali, B.; Vetro, C. A Suzuki type fixed point theorem for a generalized multivalued mapping on partial Hausdorff metric spaces. Topol. Appl. 2013, 160, 553–563. [Google Scholar] [CrossRef]
- Yang, J.S. Organization and Visualization of Massive Multi-Source Point Cloud Data. Ph.D. Thesis, Wuhan University, Wuhan, China, October 2011. [Google Scholar]
- Tan, G.X. An optimization algorithm to construct a linear octree based on natural numbers. J. Wuhan Urban Constr. Inst. 1994, 11, 53–59. [Google Scholar]
- Rossi, L.; Torsello, A. Coarse-to-fine skeleton extraction for high resolution 3D meshes. Comput. Vis. Image Underst. 2014, 118, 140–152. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.Y.; Li, Y.J.; Chen, Y.P.; Zhou, Z.D. A Mesh Simplification Method Based on Octree in Virtual Reality. Comput. Eng. Appl. 2006, 42, 34–36. [Google Scholar]
- Xiao, L.B.; Gong, J.H.; Xie, C.J. A new algorithm for searching neighbors in the linear quadtree and octree. Acta Geod. Cartogr. Sin. 1998, 27, 195–203. [Google Scholar]
- Liu, F.Z.; Li, Z.X.; Li, C.P.; Cao, Z.G. An linear octree based model for visualization of mining processes. In Proceedings of the 2011 Eighth International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Shanghai, China, 26–28 July 2011; Volume 4, pp. 2470–2474.
- Wang, M.; Tseng, Y.H. Incremental segmentation of LiDAR point clouds with an octree-structured voxel space. Photogramm. Rec. 2011, 26, 32–57. [Google Scholar] [CrossRef]
- Wang, M.; Tseng, Y.H. Automatic segmentation of LiDAR data into coplanar point clusters using an octree-based split-and-merge algorithm. Photogramm. Eng. Remote Sens. 2010, 76, 407–420. [Google Scholar] [CrossRef]
- Ali, T.A. Building of robust multi-scale representations of LiDAR-based digital terrain model based on scale-space theory. Opt. Lasers Eng. 2010, 48, 316–319. [Google Scholar] [CrossRef]
- Sun, H.Y. Research on Softening, Posting and Repairing the Gold Foil of the Dazu Thousand-Hand Bodhisattva Statue in Chongqing, China. Master Thesis, University of Science and Technology of China, Hefei, China, 2010. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Split Level | Segment Number | Encoding Time (s) | Retrieval Time (s) | Total Detection Time (s) |
|---|---|---|---|---|
| Level = 4 | 4096 | 0.407 | 164.031 | 164.438 |
| Level = 5 | 32,768 | 0.422 | 39.547 | 39.969 |
| Level = 6 | 262,144 | 0.485 | 12.125 | 12.610 |
| Level = 7 | 2,097,152 | 0.937 | 5.828 | 6.765 |
| Level = 8 | 16,777,216 | 4.813 | 4.203 | 9.016 |
| Level = 9 | 134,217,728 | Insufficient memory |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, M.; Li, S.; Jiang, L.; Wu, Y.; Hu, Y.; Yang, S.; Zhang, X. A New Method of Gold Foil Damage Detection in Stone Carving Relics Based on Multi-Temporal 3D LiDAR Point Clouds. ISPRS Int. J. Geo-Inf. 2016, 5, 60. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5050060
Hou M, Li S, Jiang L, Wu Y, Hu Y, Yang S, Zhang X. A New Method of Gold Foil Damage Detection in Stone Carving Relics Based on Multi-Temporal 3D LiDAR Point Clouds. ISPRS International Journal of Geo-Information. 2016; 5(5):60. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5050060
Chicago/Turabian StyleHou, Miaole, Shukun Li, Lili Jiang, Yuhua Wu, Yungang Hu, Su Yang, and Xuedong Zhang. 2016. "A New Method of Gold Foil Damage Detection in Stone Carving Relics Based on Multi-Temporal 3D LiDAR Point Clouds" ISPRS International Journal of Geo-Information 5, no. 5: 60. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5050060