2.1. Brief Description of the Concept of Update Propagation
A brief description on propagating updates among multi-scale datasets in MRDB is given here because it is fundamental to understand our following work. Key inputs to propagating updates of residential areas from larger-scale to smaller-scale maps include the
updated objects in the large-scale maps, the
types of object updates in the large-scale maps, and the
to-be-updated objects in the small-scale maps [
15]. Given the
updated objects and the
types of object updates in the large-scale maps, one central task of update propagation is to find the
to-be-updated objects in the small-scale maps based on the
object-matching relationships and redefine objects in the small-scale maps.
The
types of object updates in the large-scale maps, which will be propagated to objects in the small-scale maps, generally include attribute updates (e.g., land use types, household ownerships) and geometric updates [
16,
17,
18]. The geometric updates in maps of the same scale include various operations of vector polygons [
19], such as
addition (
i.e., objects are newly added),
deletion (
i.e., objects are removed),
aggregation (
i.e., several objects are merged into a new one),
partition (
i.e., one object is split into several new objects),
exaggeration (
i.e., important objects are enlarged), and
geometric transformation (
i.e., objects are reshaped and transformed to another projection).
The
object-matching relationships denote the linkages among corresponding objects in maps of different scales. Since we focus on residential areas (
i.e., polygon vectors) in this study, common types of the
object-matching relationships often denoted by the ratio between the object numbers in the large-scale and the small-scale maps (
i.e., large-scale: small-scale) include 0:1, 1:0, 1:1, m:1 (m > 1), 1:n (n > 1), and m:n (m > 1 and n > 1) matching of objects. The
object-matching relationships that link
updated objects and
to-be-updated objects can be established based on spatial analysis on topology relationships, relative distances, and geometric shapes [
20,
21]. Studies have also developed complex methods, such as the linking-tree model [
22], the generalization log model [
23], and the area partition method [
24], to link objects in MRDB.
The propagation of updates needs to satisfy specific cartographical requirements that could vary in different studies and applications. Generally, all the built small-scale objects should reserve the spatial characteristics of the large-scale objects as close as possible in term of polygon shapes, polygon areas, and polygon positions. Specifically, because the purpose of this study is to update residential areas in the scale maps, we account for common cartographical generalization criteria as follows: (1) Maximum distance for aggregation: the newly added large-scale objects if close to existing large-scale objects of the same attribute type needs to be synthesized into the group of large-scale objects and processed together to update the small-scale object, meaning we need to perform the operation of aggregation to search for all corresponding objects within a specific maximum distance; (2) Shape suitability: considering the cartographical effects of mapping residential areas, small-scale objects after updates should have near-regular shapes. Irregular parts in the polygon (e.g., small needle-shaped polygons connected to a large rectangle polygon) are considered unsuitable and require further processing; (3) Rectangularity: due to the spatial characteristics of the residential areas, updated polygons if having near-rectangular interior angles are expected to have rectangular interior angles and need to be processed to a rectangle; (4) Minimum representable area: each object in a topographic map needs to have an area greater than a minimum representable area to be viewable and meaningful; otherwise, exaggeration or deletion needs to be applied to important or unimportant objects, respectively.
2.2. A Parallel Strategy of Update Propagation
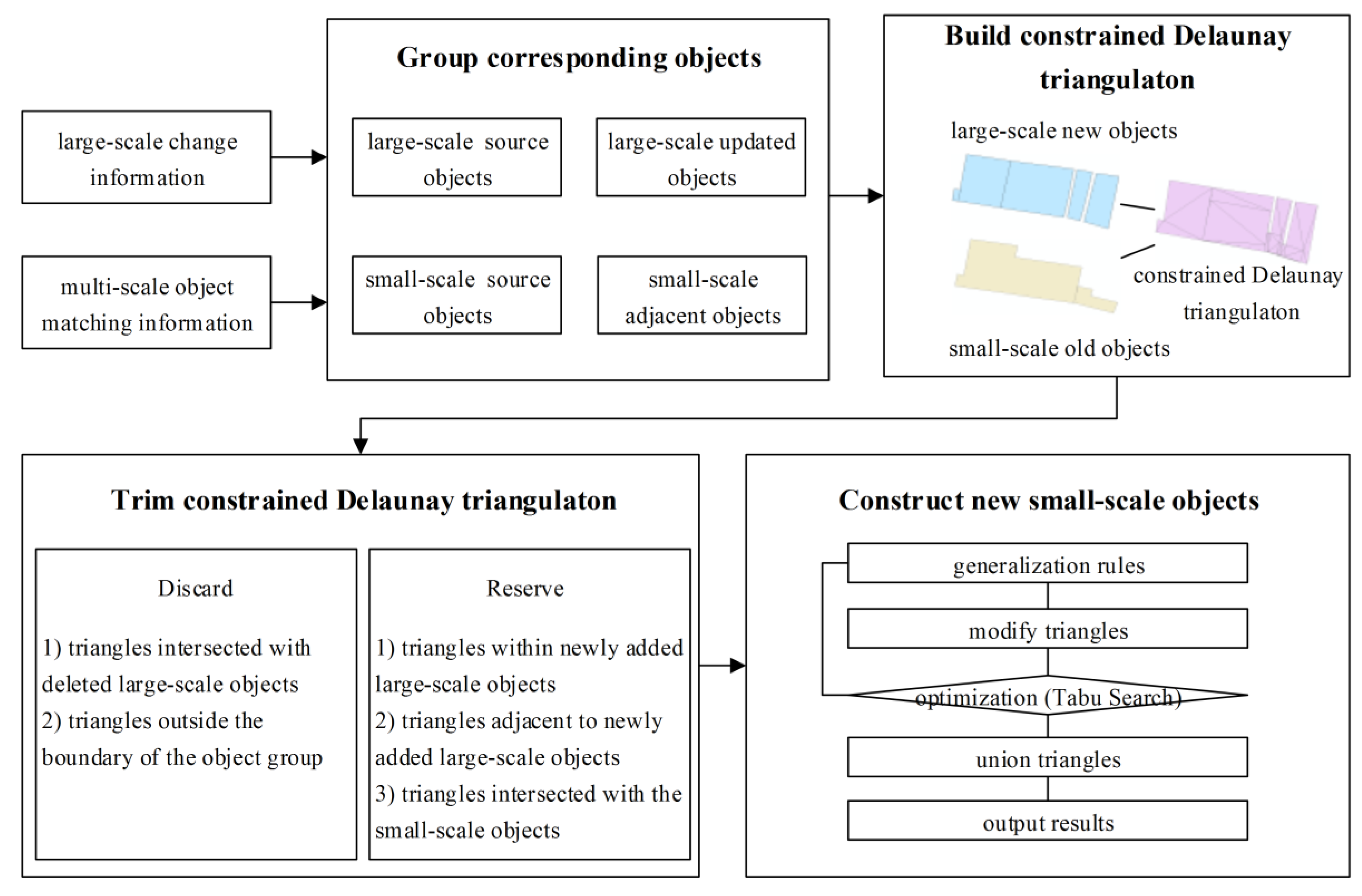
Figure 1 illustrates the main steps in the workflow of our method. We group the corresponding objects at different scales and then decompose the updated objects in the large-scale maps into triangles based on constrained Delaunay triangulation, which are further edited and constructed into objects in the small-scale maps. In essence, we transform the problem of update propagation to the selection and combination of a bunch of tiny triangles, such that the small-scale object can be produced from all corresponding triangles simultaneously to meet the cartographical generalization criteria. Each step is further explained in following sections.
2.2.1. Group Corresponding Objects
To achieve parallel update propagation, spatially-related objects in maps of different scales need to be grouped together for later processing. Considering the types of object updates in the large-scale maps, there are three fundamental operations for update propagation: (1) addition (e.g., new buildings added in the large-scale map have no matching objects in the small-scale map, then based on cartographical generalization rules, objects within a certain distance in both the large- and small-scale maps are grouped); (2) deletion (e.g., buildings removed in the large-scale map have a corresponding object in the small-scale map, then the corresponding small-scale object and its associated large-scale objects are grouped); and (3) modification (e.g., buildings are modified in the large-scale maps in terms of attribute updates or geometric updates, then the corresponding small-scale object and its associated large-scale objects along with large-scale objects within a certain distance are grouped). To simplify the process of update propagation, other types of object updates in the large-scale maps, such as aggregation, partition, exaggeration, and geometric transformation, can be converted to the above-mentioned three types of operations.
2.2.2. Build Constrained Delaunay Triangulation
Large-scale objects are decomposed into groups of triangles based on constrained Delaunay triangulation. The method of constrained Delaunay triangulation is a computational process that breaks polygons into certain segments and forces these segments into triangles [
25]. Constrained Delaunay triangulation is widely used in Geographic Information System (GIS) applications [
26,
27,
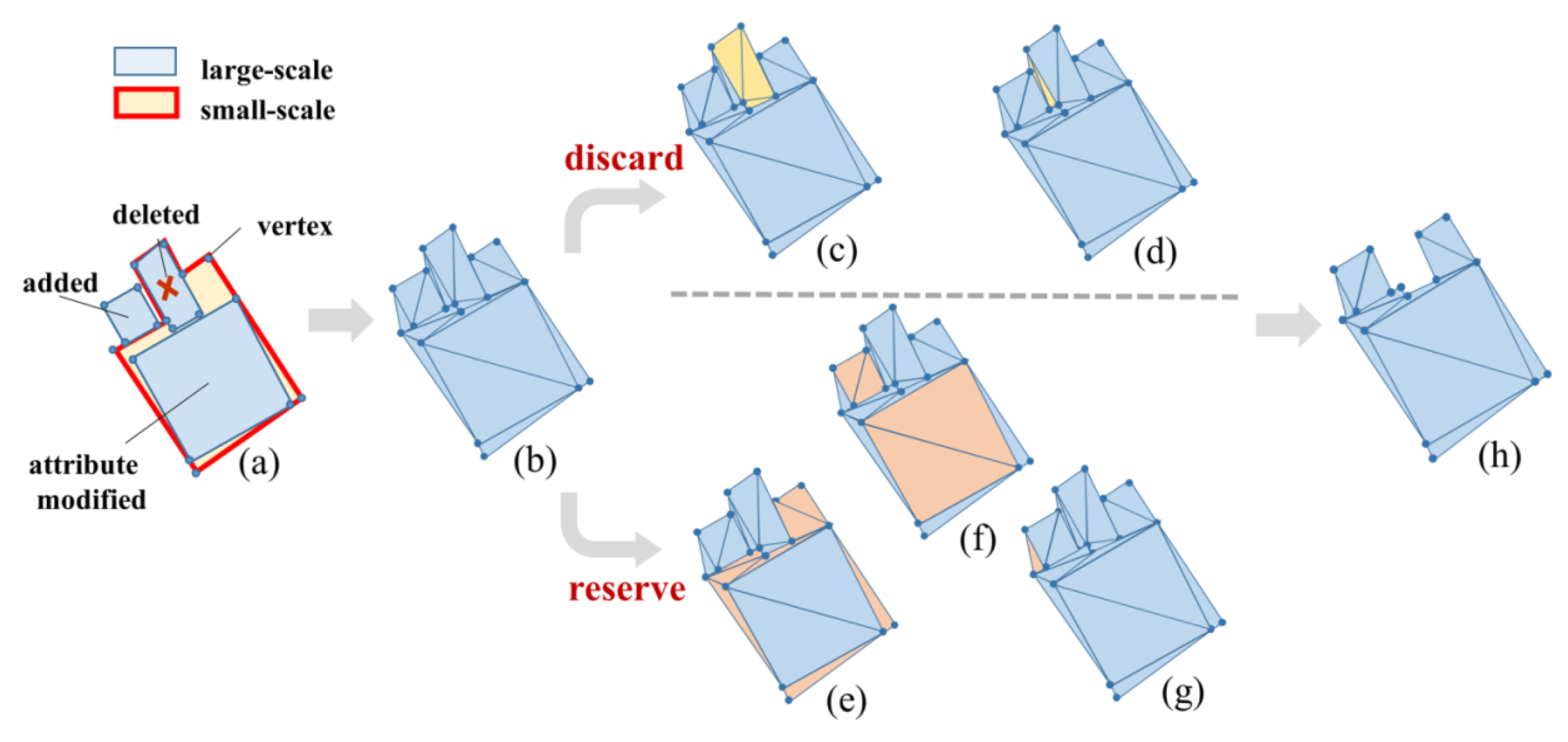
28] and is embedded in common GIS software (e.g., the ArcGIS software). One key in building constrained Delaunay triangulation is to determine the vertex of each triangle, such that the point sets of vertex could maximize the smallest interior angle of all triangles. We traverse each individual object within the groups of objects, and extract the vertex of each object as the nodes of the triangulation (
Figure 2). In addition, because it is necessary to maintain the general shape of the objects in update propagation, the sides of the original polygons are used as conditional boundaries to constrain the extraction of the vertex when building a constrained Delaunay triangulation.
2.2.3. Trim Constrained Delaunay Triangulation
To propagate updates of objects from large- to small-scale maps, we need to fuse the built network of triangles, where the key is to select triangles properly. Accounting for the spatial relationship between
updated objects and
to-be-updated objects, the rules to operate the triangles are simple: (1) we discard triangles that are intersected with the deleted large-scale objects or triangles that are outside the boundary of the object group and are adjacent to the deleted object; and (2) we reserve triangles that are within the newly added large-scale objects, triangles that are adjacent to the newly added large-scale object, and triangles that are located within the unchanged small-scale object.
Figure 2 illustrates the operations on the built network of triangles.
2.2.4. Construct New Small-Scale Objects Using the Tabu Search Algorithm
Consider a trimmed network of constrained Delaunay triangulation as follows:
where
denotes each triangle element in the network.
The key to constructing small-scale objects is to determine the sequence of triangle combination that satisfies cartographical generalization criteria and achieve the best generalization results (e.g., maintain the general shape of the corresponding objects, sustain minimum changing areas, sustain minimum moves of vertex). Due to the cartographical generalization criteria, the processing of update propagation is far more complicated than simple merging of all remaining triangles, because the outcome of the constructed small-scale objects are dependent on the processing sequences of triangles and the cartographical operations. Reconstructing large-scale objects to produce small-scale objects is essentially a problem of combinatorial optimization.
Here we use the Tabu Search algorithm to process the construction of the small-scale objects. The Tabu Search algorithm could obtain near-optimal solutions to the combinatorial problems [
29,
30]. It searches for global near-optimal solutions without repeating searches by allowing temporary acceptance of worse solutions to avoid being trapped in a local optimum. In the Tabu Search algorithm, potential solutions are stored in the Tabu list, which are used to avoid repeating searches and to find the acceptable solution. The Tabu Search algorithm has a wide range of applications, such as job-shop scheduling, vehicle routing planning, and design of groundwater remediation systems [
31,
32,
33].
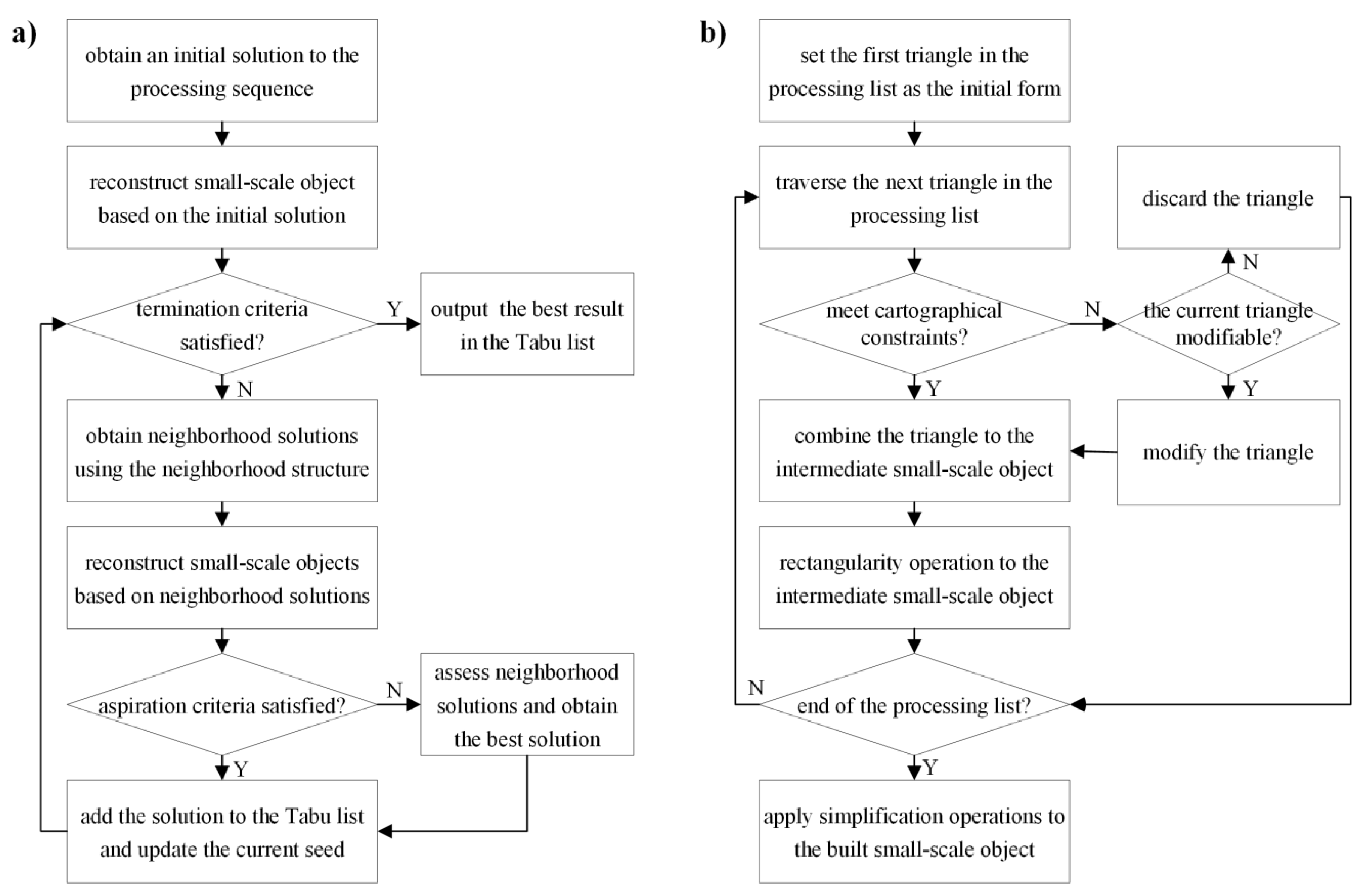
Figure 3a illustrates the procedures to apply the Tabu Search algorithm for constructing the small-scale objects. We first obtain an initial solution to the processing sequence as the current seed and test whether constructed small-scale objects based on the solution satisfy the termination criteria. The iteration processes terminate if the maximum number of iterations is reached or the constructed small-scale objects based on the current seed solution satisfy the mapping criteria (
i.e., the constructed small-scale objects fit all cartographical constraints). If the termination criteria are satisfied, the best solution in the Tabu list is chosen as the final output; otherwise, neighborhood solutions to the processing sequence are generated as candidates based on the neighborhood structure of the current seed. If constructed small-scale objects based on one candidate solution could satisfy the aspiration criterion (see the cost function in Section Neighborhood Solutions and Their Evaluation), the solution is added to the Tabu list directly and updated as the current seed; otherwise, the neighborhood solutions are evaluated, whereas the best one is added to the Tabu list and updated as the current seed. The process is repeated iteratively until the termination criteria are satisfied.
2.2.4.1. Initial Solution
To obtain the initial solution to the processing of triangles for generating small-scale objects, it is necessary to build a matrix that is indicative of the adjacent relationships of triangles based on the topological relation as follows:
where
denotes each triangle element in the network as described in Equation (1), and
is a Boolean variable, where
indicates that
and
are adjacent and
indicates that
and
are not adjacent.
Given the matrix of the adjacent relationships, the initial solution of the processing sequence list can be obtained based on the following steps: (1) A triangle is randomly selected from the constrained Delaunay triangulation as the seed and added to the processing sequence list; (2) If there are neighborhood triangles of the seed element, one neighborhood triangle is randomly chosen as the seed and added to the processing sequence list; otherwise, the first step is repeated; (3) The second step is repeated until all triangles in the constrained Delaunay triangulation are added to the processing sequence list.
2.2.4.2. Construct Small-Scale Objects Based on a Given Solution
To evaluate a given solution to the processing sequence of triangles, it is necessary to construct small-scale objects, of which the process has to account for cartographical generalization rules. Therefore, the construction of small-scale objects can be achieved based on the following steps (
Figure 3b): (1) We start from the first element in the processing sequence list; (2) We combine the current polygon with the next triangle in the processing sequence list and check whether the combined polygon violates cartographical constraints; (3) If the cartographical constraints are violated (e.g., an interior angle of the polygon is small), the combined polygon is modified (e.g., the operation of rectangularity) to meet the cartographical constraints. If, even after modification, the combined polygon could not meet the cartographical constraints, the newly added triangle is discarded; (4) Step 2 is repeated until all triangles in the processing sequence list are handled and the small-scale object is built.
There are three operations to meet cartographical constraints during the construction of small-scale objects: (1) Exclusion of unsuitable triangles: unsuitable triangles (e.g., small long narrow triangles connected to the main polygon) are possibly introduced when building or trimming constrained Delaunay triangulation [
34]. If the triangle has a very small interior angle and if it does not share a common side with other triangles or it only shares one very short side with other triangles, the corresponding triangle is considered as an unsuitable triangle and is excluded during the construction of the small-scale objects; (2) Rectangularity: given a near-rectangular interior angle, rectangularity is to convert the interior angle to a rectangle, which is done by drawing a vertical line from the corresponding vertex that connects to the shorter side to the longer side and regenerating the shape of the polygon; (3) Elimination of small objects: if the object in a topographic map has an area smaller than the minimum representable area, the corresponding object is removed because we do not consider the operation of
exaggeration in the current study. An example provided in
Figure 4b illustrates the application of the operations when constructing the small-scale objects.
2.2.4.3. Neighborhood Solutions and Their Evaluation
If the constructed small-scale objects does not satisfy the mapping criteria, a neighborhood solution is generated based on the neighborhood structure Equation (2), which is derived based on the spatial relationship of the triangles. First, each adjacent triangle of the first element in the current processing sequence list is set as the first element of the new processing sequence list. If there are no adjacent triangles of the first element in the current processing sequence list, three random and unsearched triangles are chosen as the first elements of the new processing sequence list. Second, similar to the method that derives the initial solution of the processing sequence list (
Section 2.2.4.1.) we start with the given first elements of the processing sequence lists to obtain new solutions as the neighborhood solutions. Last, we evaluate neighborhood solutions that are used to construct small-scale objects and add the optimal solution to the Tabu list.
Evaluating the solutions needs to account for how well the constructed small-scale object meets cartographical constraints and reserves the spatial characteristics of the large-scale objects [
35]. Because we have already modified the small-scale objects to meet cartographical constraints when constructing small-scale objects, we use a cost function to evaluate the reservation of the spatial characteristics as follows:
where
is the overall cost function;
,
, and
represent the area similarity index, the position similarity index, and the shape similarity index, respectively; and
,
, and
are weighting functions. When performing the evaluation in our study, all weights have a value of 1/3.
The components in the cost functions are derived as follows:
where
and
are the areas of corresponding small- and large-scale objects, respectively;
and
are the horizontal coordinates of the centroid point of the small- and large-scale objects, respectively;
and
are the vertical coordinate of the centroid point of the small- and large-scale objects, respectively;
and
are the total areas of corresponding objects in the large- and small-scale maps, respectively; and
is the overlapping area between the small- and large-scale objects. All indices have the value between 0 and 1, thus the value of the overall cost function
ranges from 0 to 1.
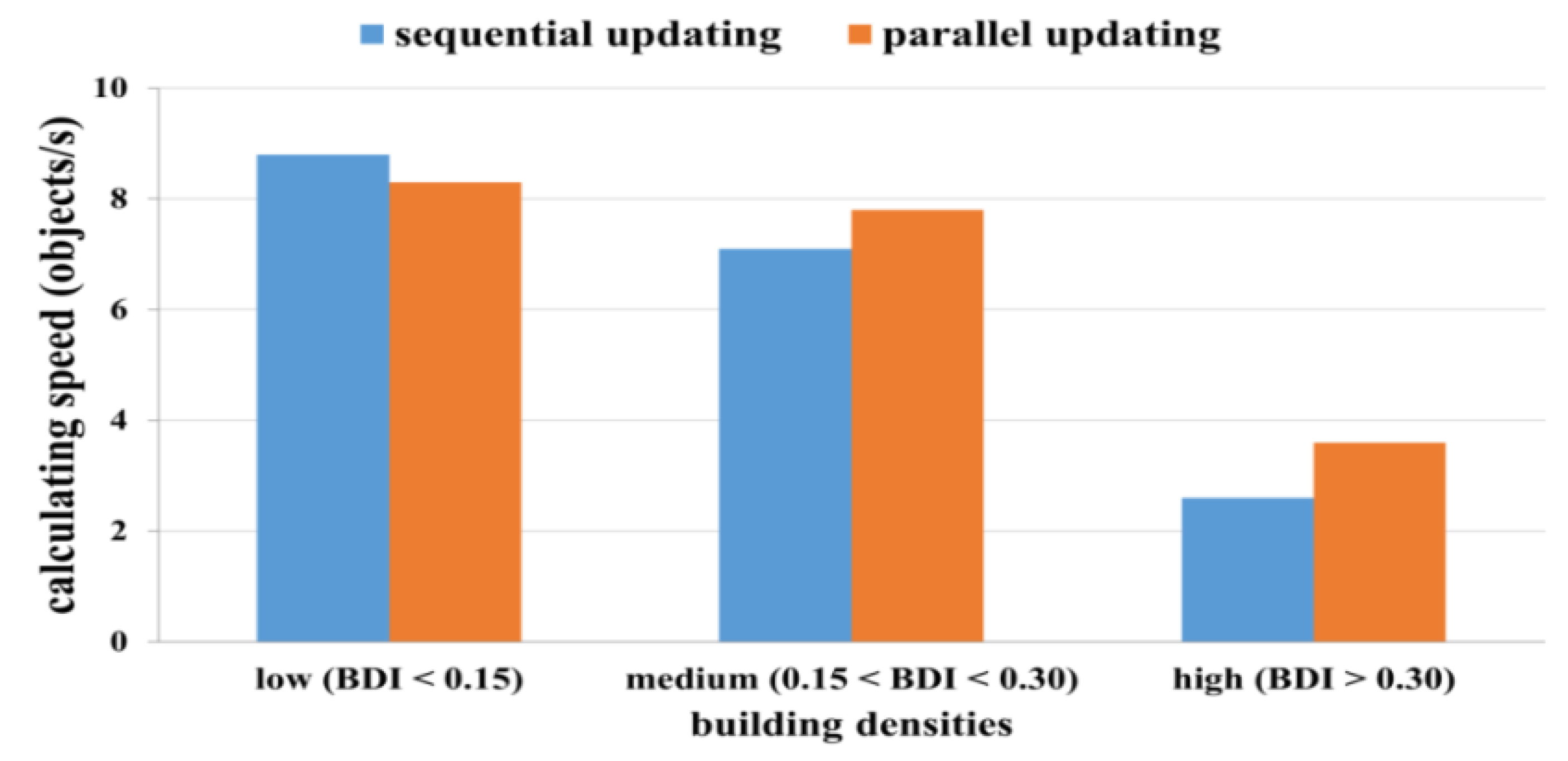
2.2.5. Parallel versus Sequential Updating
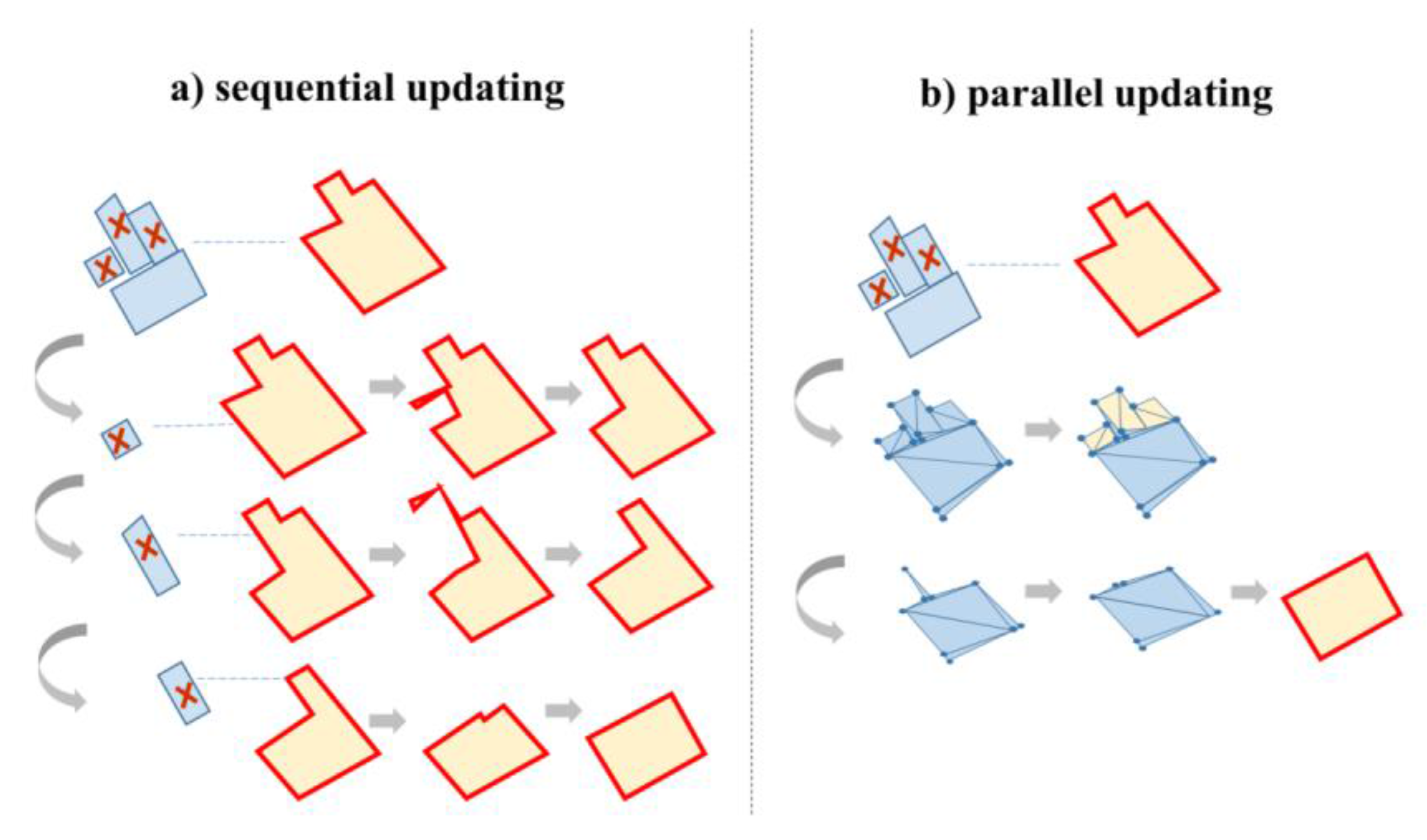
The method that we developed essentially supports parallel processing of updated residential areas to produce small-scale objects, and is different from the sequential processing method.
Figure 4 shows an example that illustrates the difference between parallel and sequential processing in constructing small-scale objects. The sequential method chooses to traverse all updated large-scale objects sequentially and propagate them to the small-scale objects [
8,
36]. For the m:1 object-matching relationship, the sequential method neglects the mutual connections among adjacent large-scale objects and propagates the updates one by one, thus resulting in a heavy computational burden. In comparison, our method groups large-scale objects and operates all decomposed triangles together, thereby potentially improving the computational efficiency.
2.3. Case Study and Materials
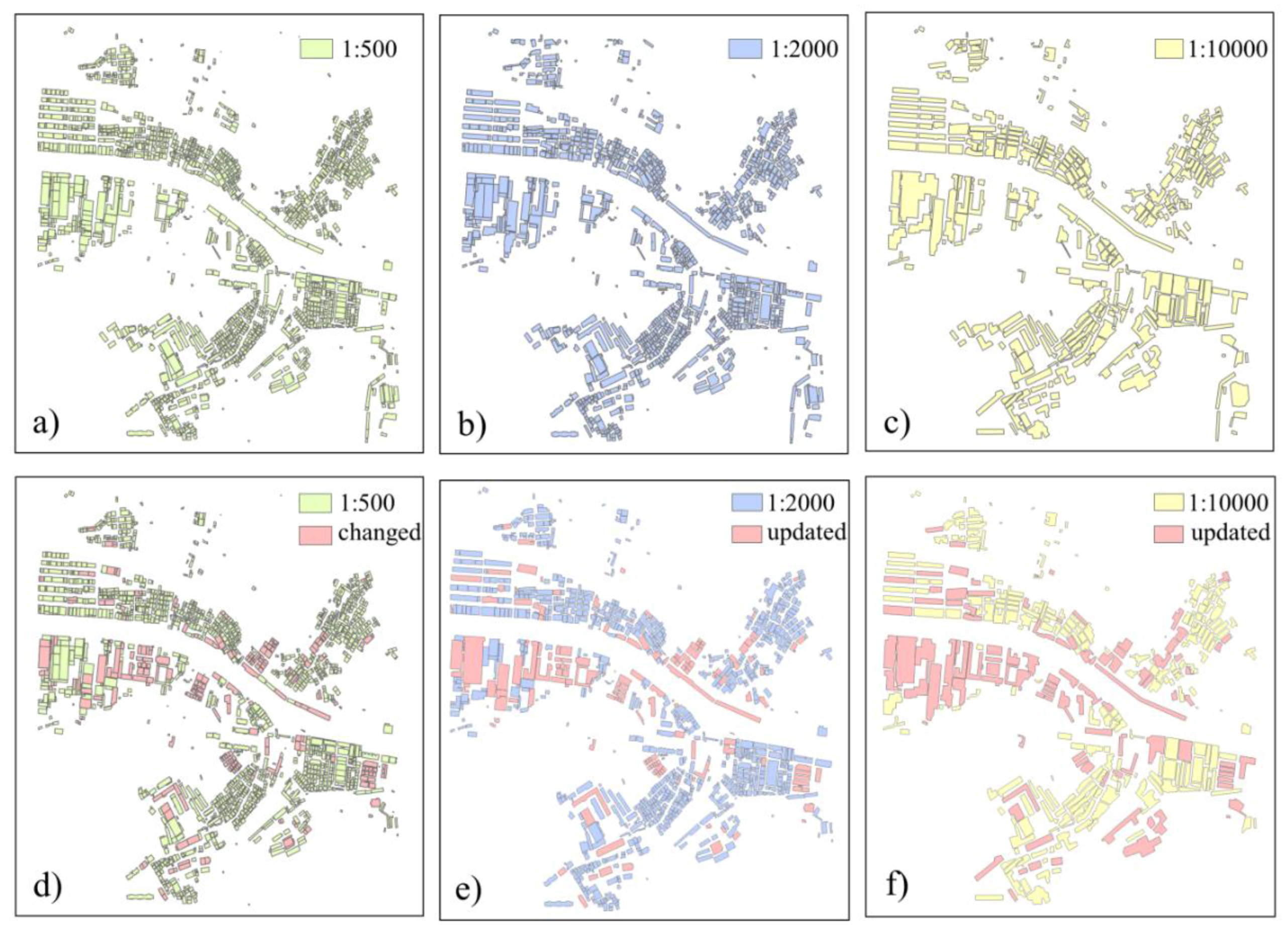
We applied our method to update the digital maps of residential areas in the Zengcheng city in south China. The digital maps shown in
Figure 5 were obtained from local Administration of Surveying Mapping and Geo-Information, and were provided for three different scales (
i.e., 1:500, 1:2000, and 1:10,000). All original maps were produced for the year of 2005 (
Figure 5a–c). The 1:500 map was updated for the year of 2013 (
Figure 5d) and the 1:2000 and 1:10,000 topographical maps were maps to be updated. To evaluate the obtained results, the 1:2000 and 1:10,000 topographic maps (
Figure 5e,f, respectively) were also manually updated by professionals based on the updated 1:500 topographic map.
The produced small-scale maps have to meet cartographic constraints. Referring to the regulations of cartographic symbols for national fundamental scale maps in China, the maximum distance for aggregation is set as 1 and 2 m for the 1:2000 and 1:10,000 topographic maps, respectively; the tolerance of data error in the map is set as 1 and 1.5 m for the 1:2000 and 1:10,000 topographic maps, respectively; and the minimum representable area in the map is set as 24 and 48 square meters for the 1:2000 and 1:10,000 topographic maps, respectively.
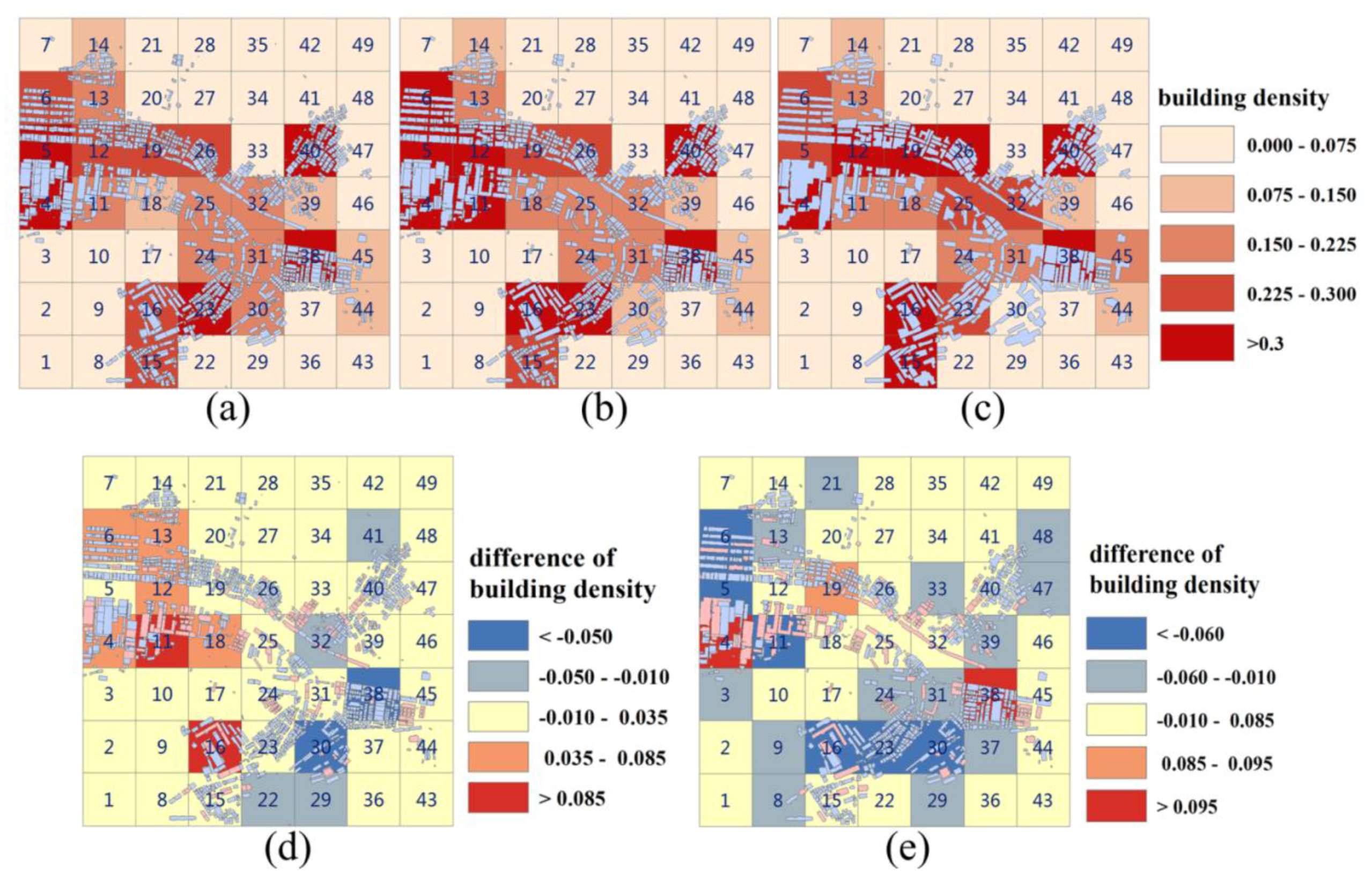
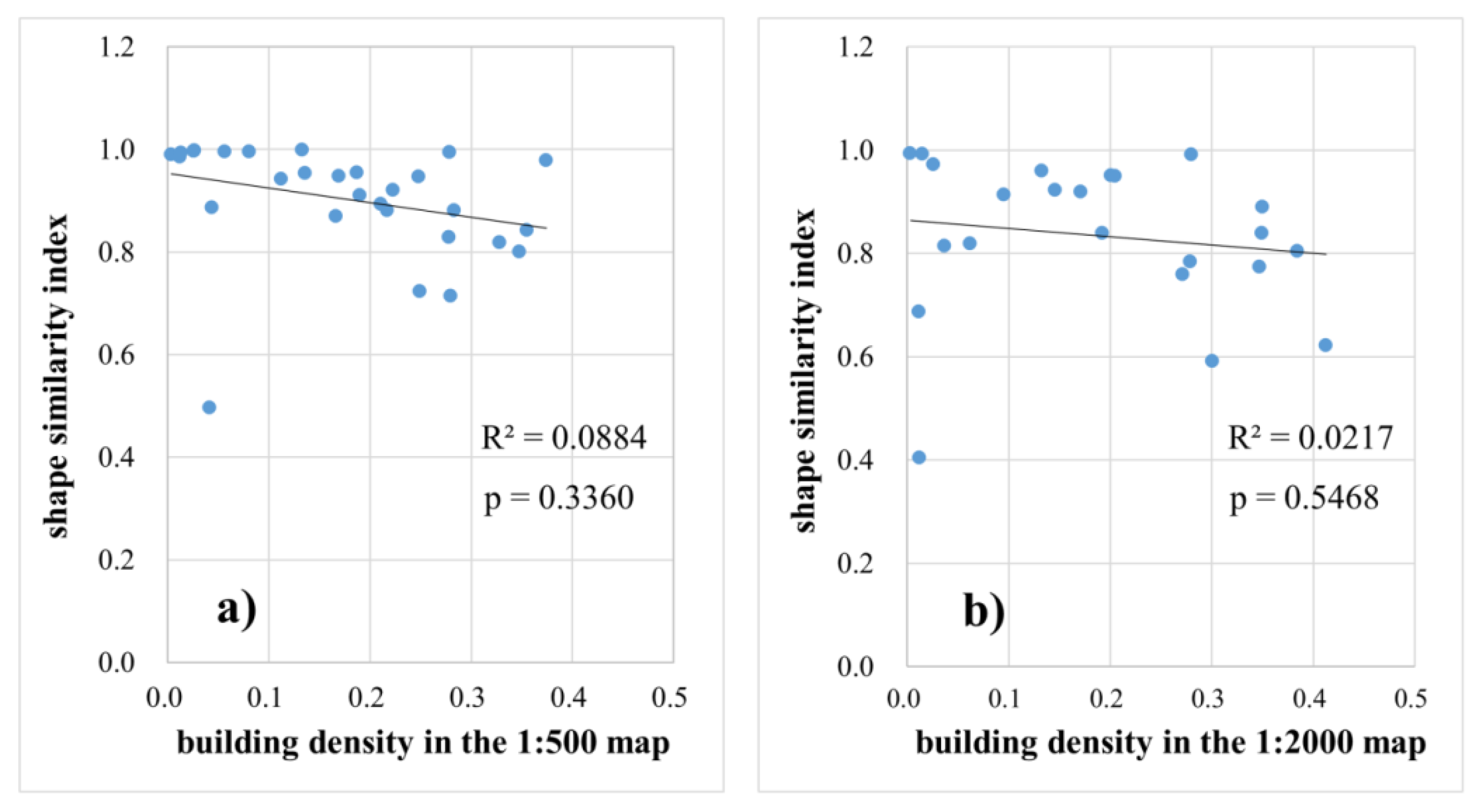
In addition, to understand how the method of update propagation would influence the spatial pattern of residential areas in maps of different scales, the building density index is used in our case study and is derived as follows:
where
is the building density index,
is the area of each polygon of the residential area located in a given grid, and
is the total area of a grid.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}