
A Novel Absolute Orientation Method Using Local Similarities Representation


Abstract
:1. Introduction
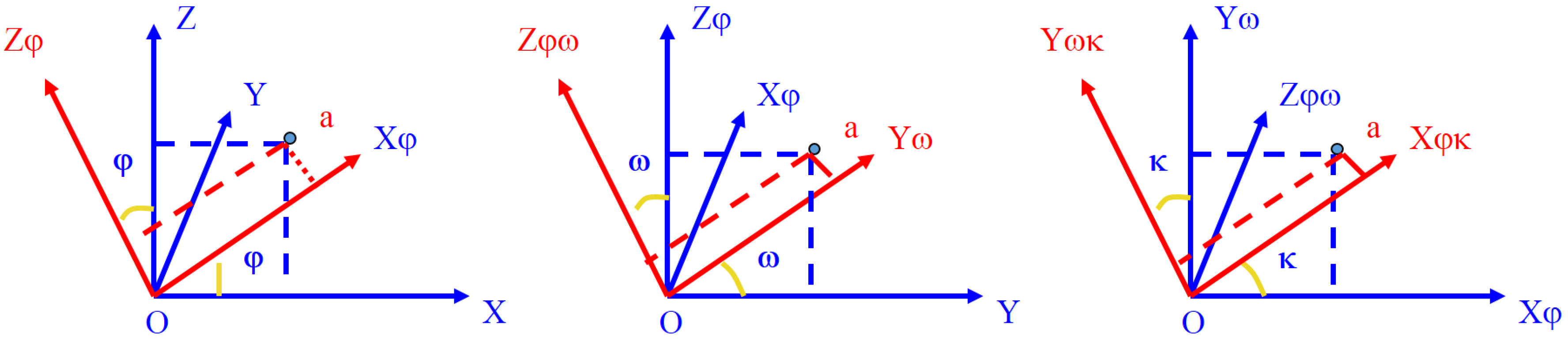
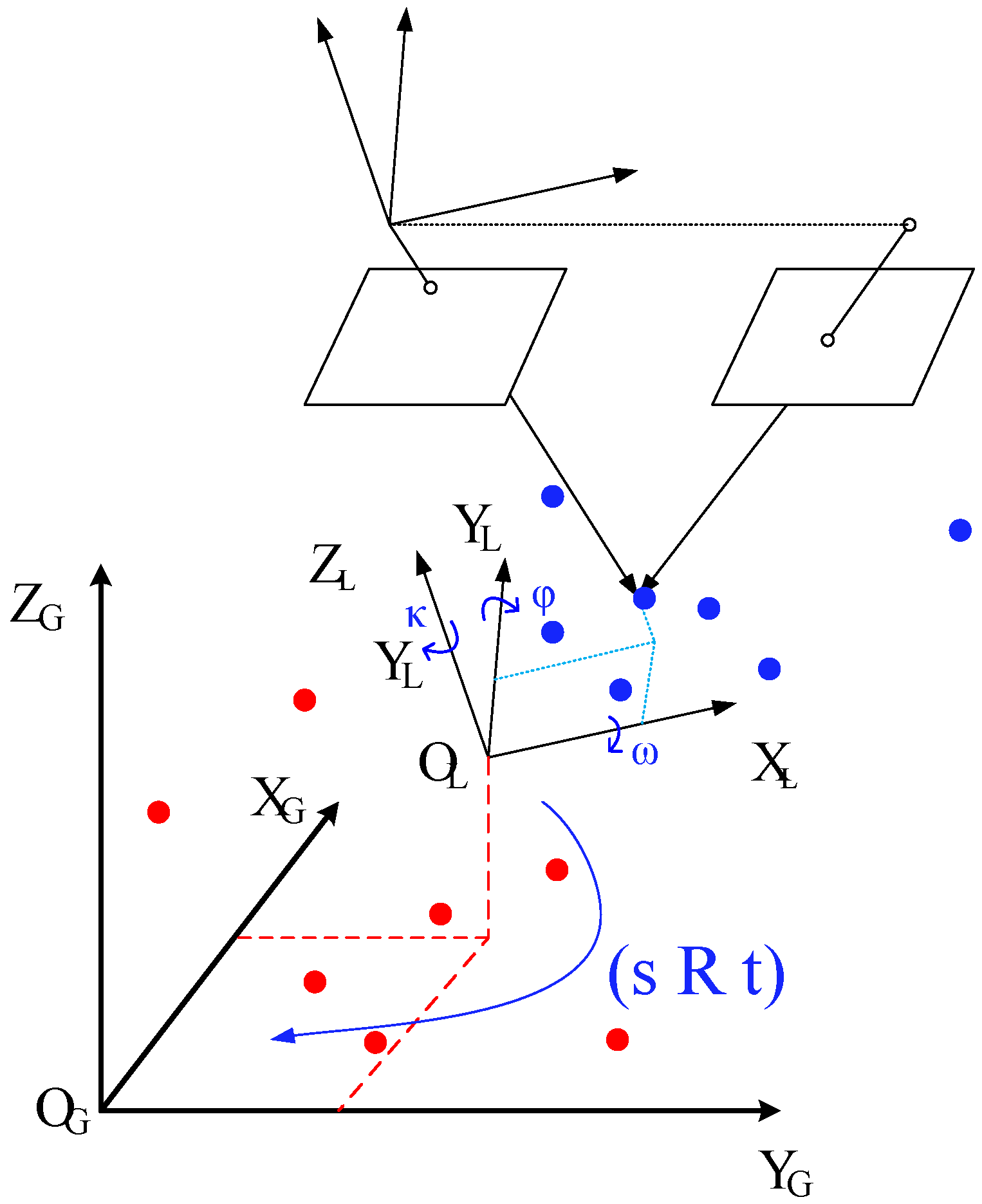
2. Single Similarity Transformation
3. Local Similarities Representation
3.1. Generation of the Triangular Irregular Network Model
3.2. Estimation of the New Transformation Based on Local Similarities
3.3. Weighting Function for Combining Local Similarities
4. Experiments and Discussion
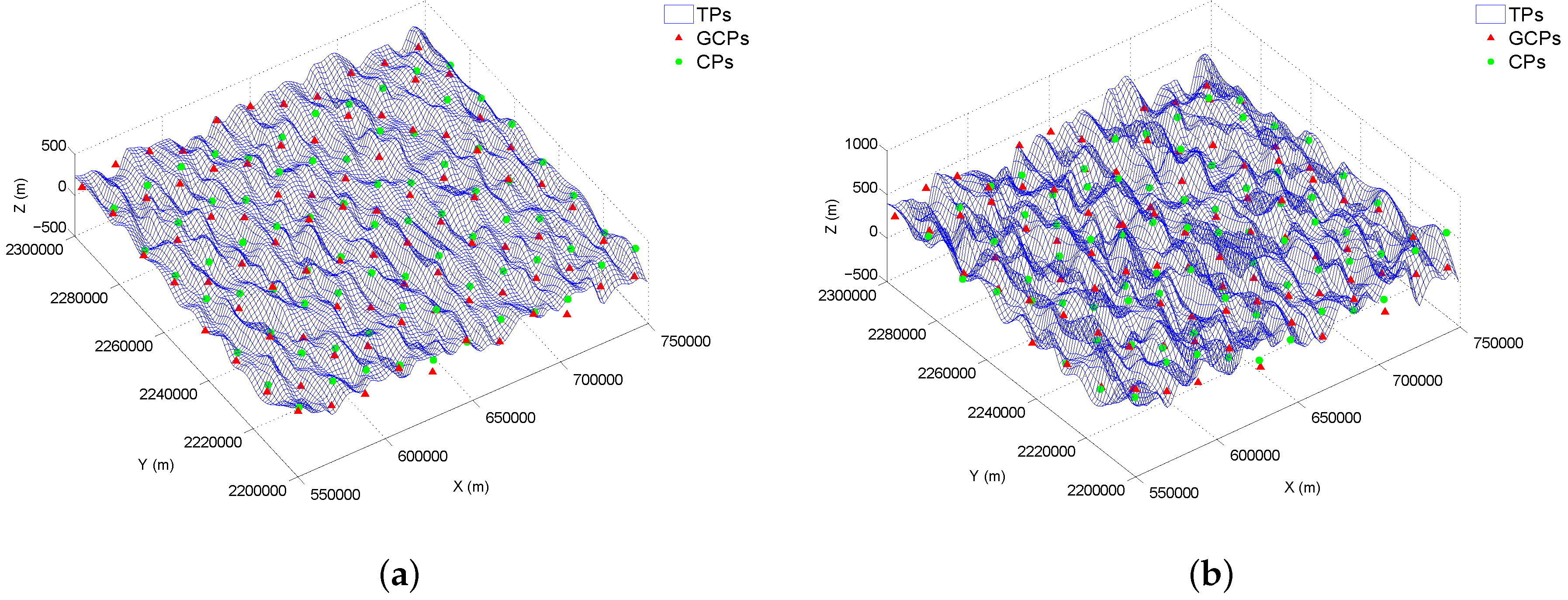
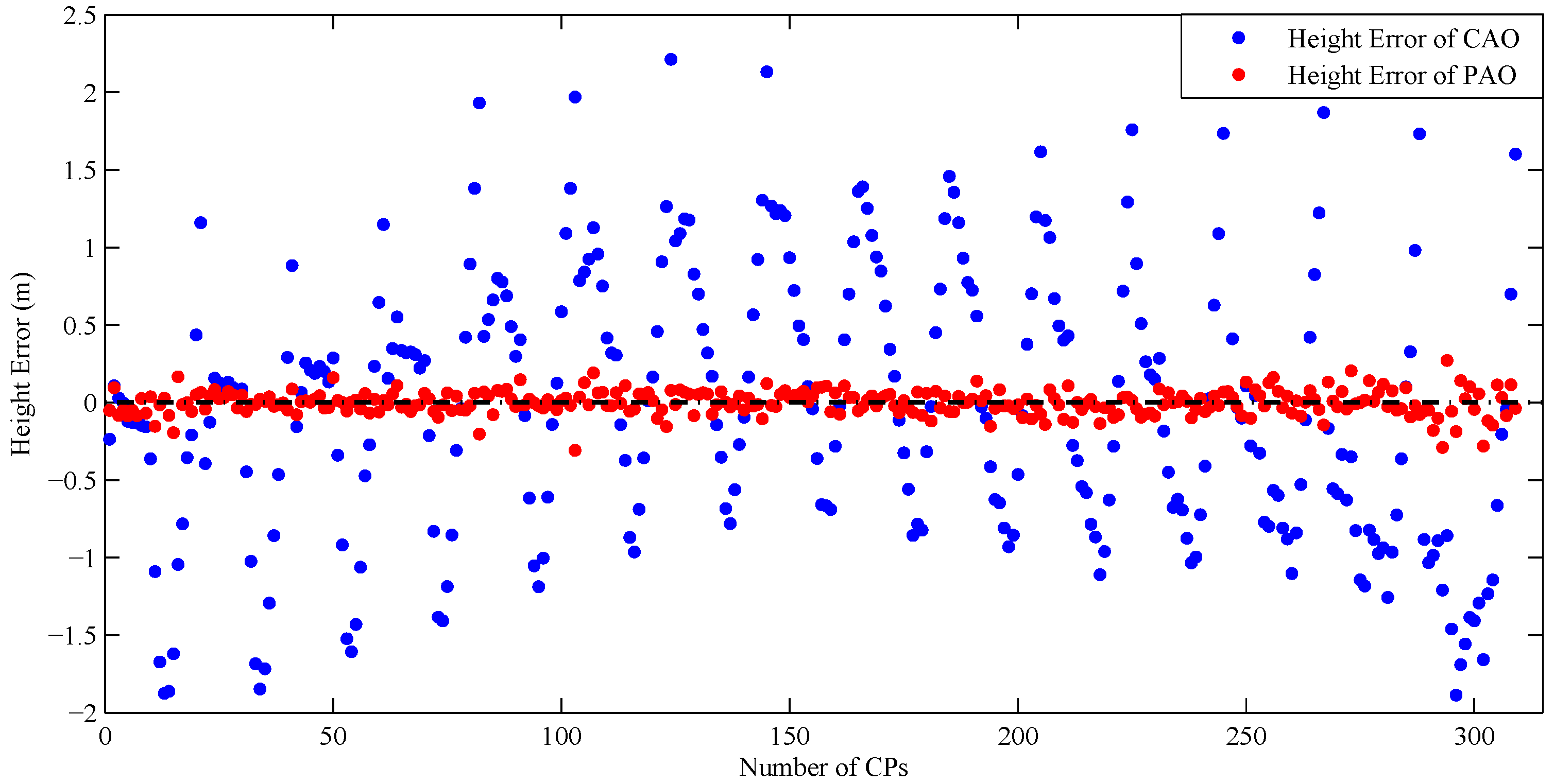
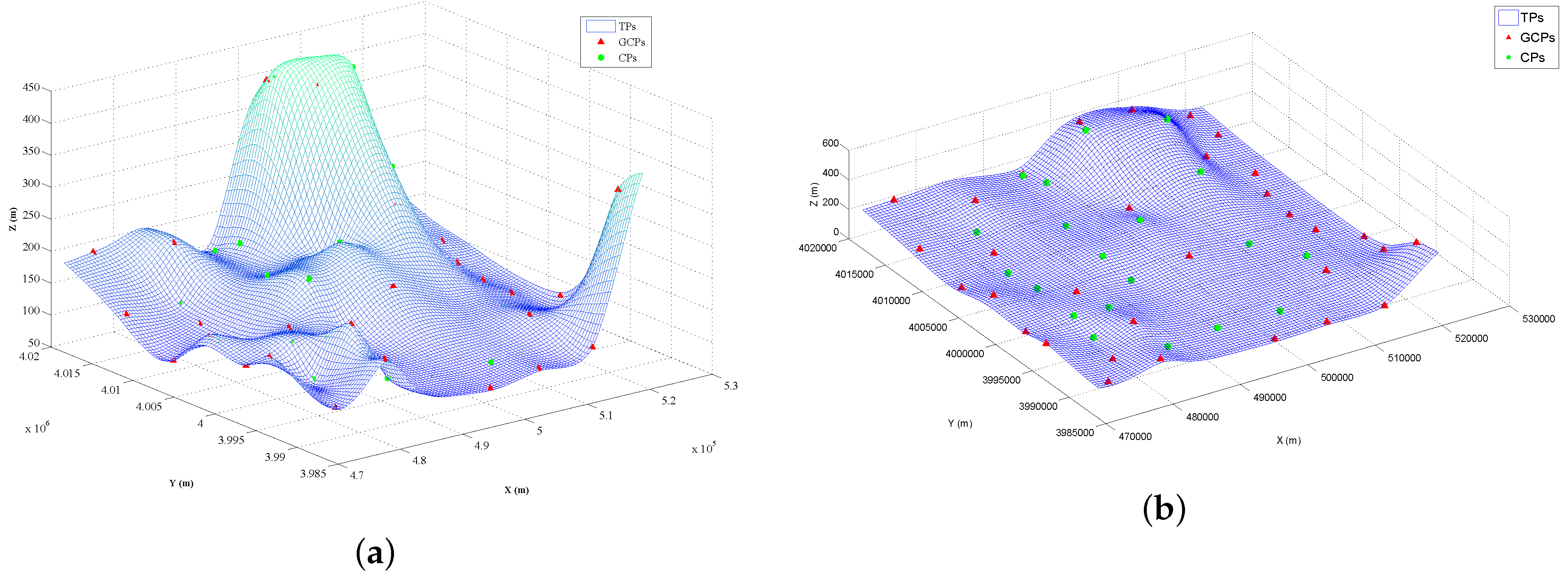
4.1. Simulated Data Sets
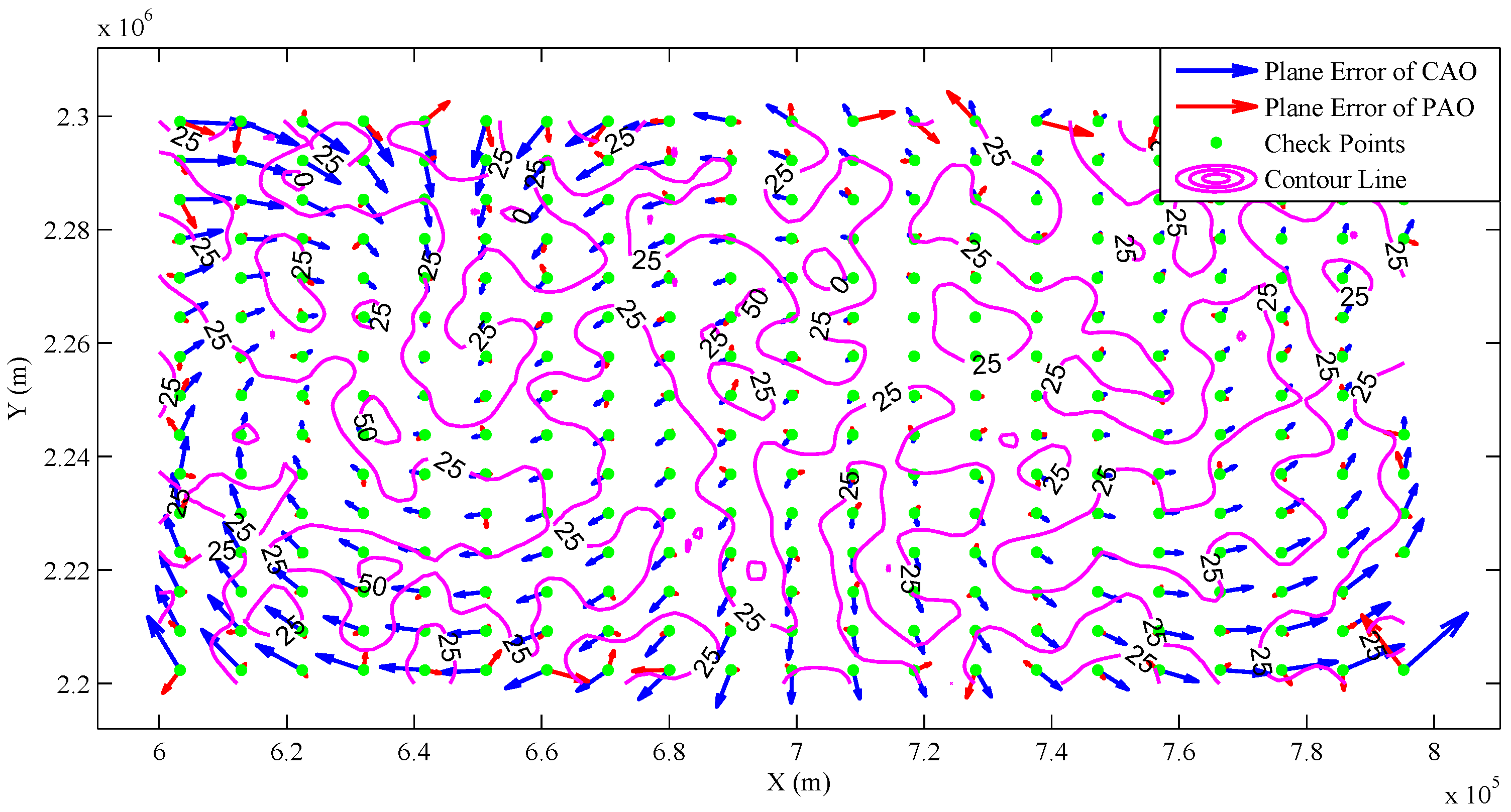
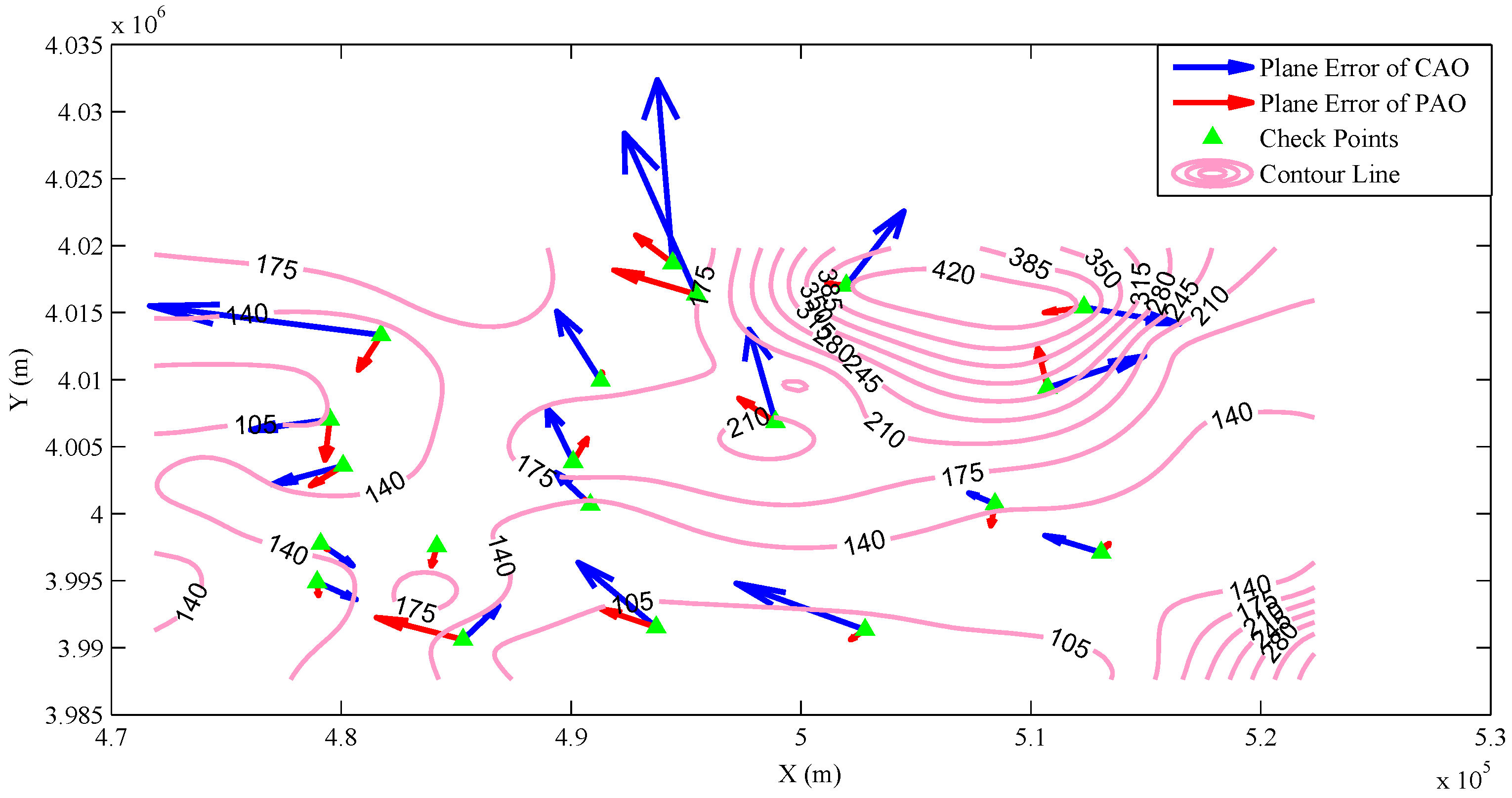
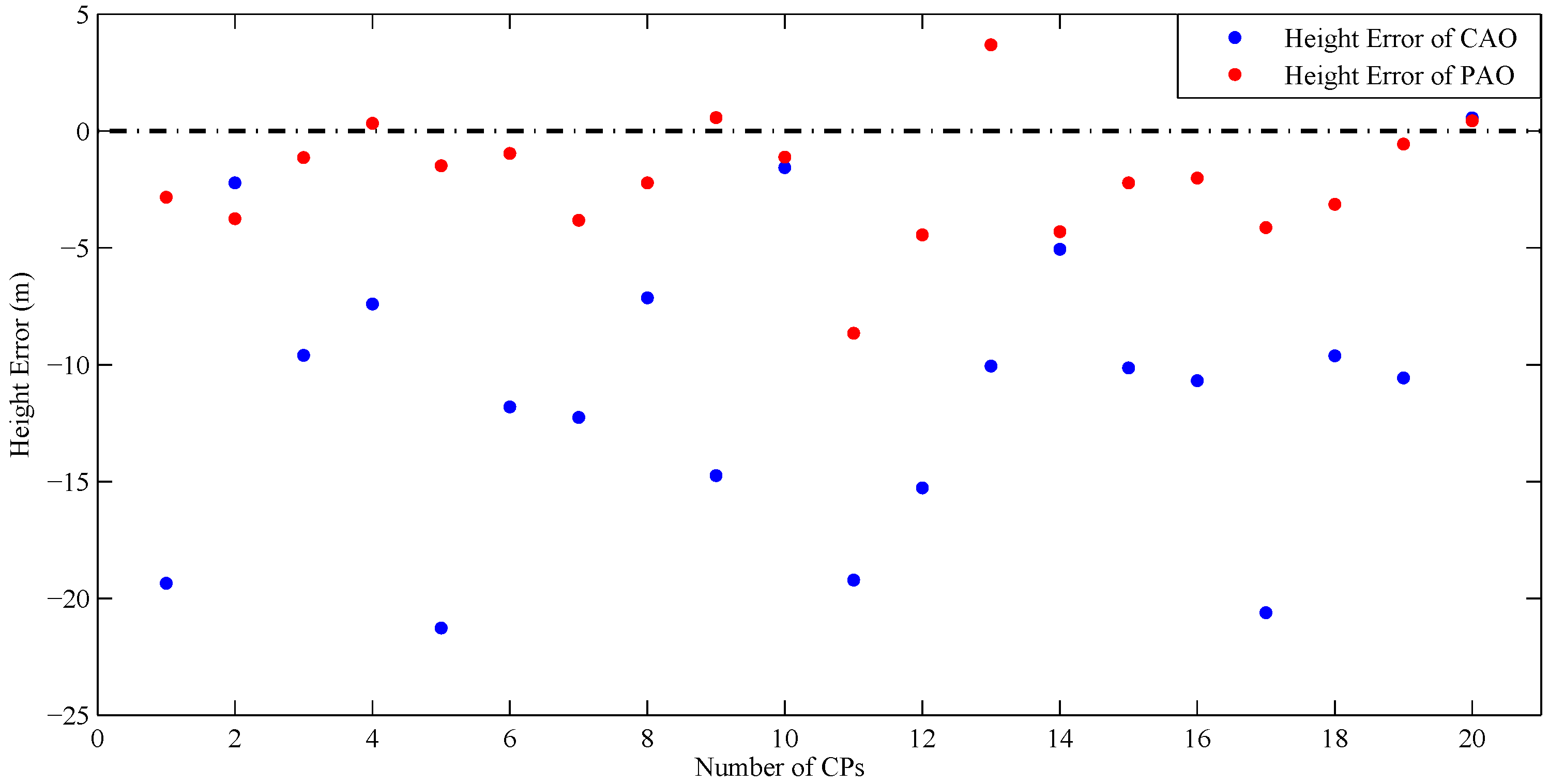
4.2. Real Data Set
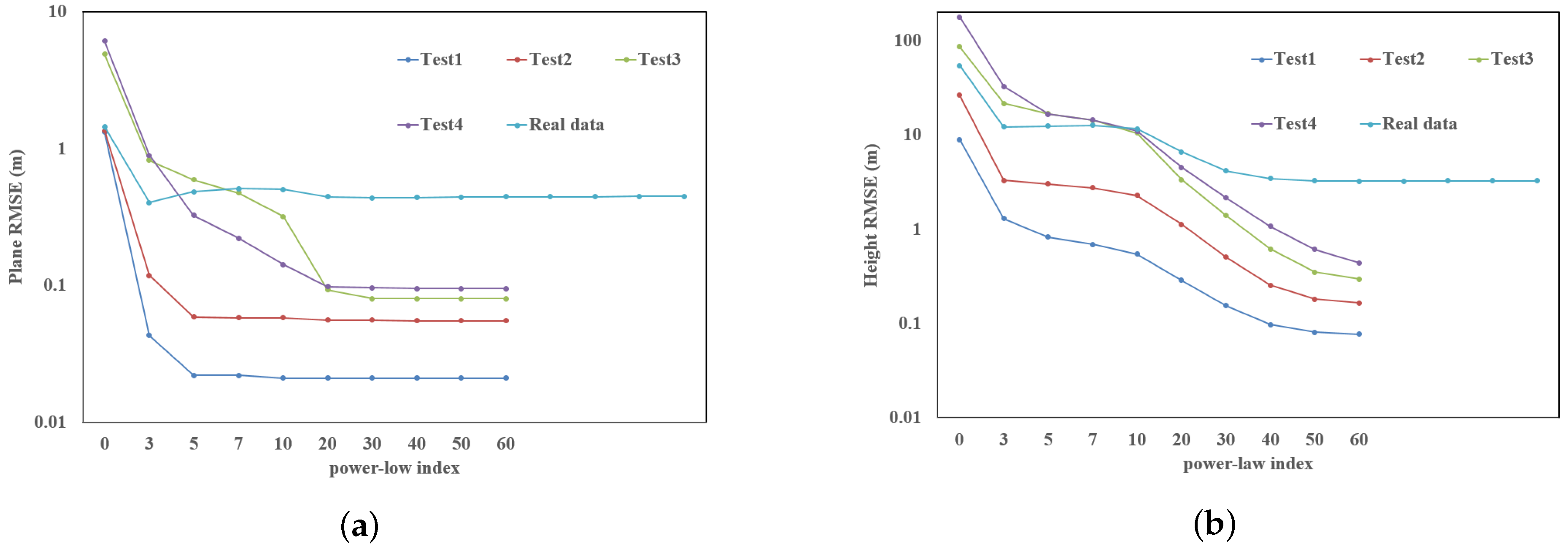
4.3. Analysis of the Influence of the Power-Law Index on the Accuracy of the Proposed Method
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D city models: State of the art review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar]
- Nebiker, S.; Cavegn, S.; Loesch, B. Cloud-Based geospatial 3D image spaces—A powerful urban model for the smart city. ISPRS Int. J. Geo-Inf. 2015, 4, 2267–2291. [Google Scholar] [CrossRef]
- Ohori, K.A.; Ledoux, H.; Biljecki, F.; Stoter, J. Modeling a 3D city model and its levels of detail as a true 4D model. ISPRS Int. J. Geo-Inf. 2015, 4, 1055–1075. [Google Scholar] [CrossRef]
- Hildebrandt, D. A software reference architecture for service-oriented 3D geovisualization systems. ISPRS Int. J. Geo-Inf. 2014, 3, 1445–1490. [Google Scholar] [CrossRef]
- Virtanen, J.-P.; Hyyppä, H.; Kämäräinen, A.; Hollström, T.; Vastaranta, M.; Hyyppä, J. Intelligent open data 3D maps in a collaborative virtual world. ISPRS Int. J. Geo-Inf. 2015, 4, 837–857. [Google Scholar] [CrossRef]
- Gregory, A.; Lipczynski, R. T. The three dimensional reconstruction of human facial images. In Proceedings of the 15th Annual International Conference on Engineering in Medicine and Biology Society, San Diego, CA, USA, 28–31 October 1993.
- Liu, Z.; Qin, H.; Bu, S.; Yan, M.; Huang, J.; Tang, X.; Han, J. 3D real human reconstruction via multiple low-cost depth cameras. Signal Process. 2015, 112, 162–179. [Google Scholar] [CrossRef]
- Van den Heuvel, F.A. 3D reconstruction from a single image using geometric constraints. ISPRS J. Photogramm. Remote Sens. 1998, 53, 354–368. [Google Scholar] [CrossRef]
- Yang, L.; Sheng, Y.; Wang, B. 3D reconstruction of building facade with fused data of terrestrial LiDAR data and optical image. Optik - Int. J. Light Electron Opt. 2016, 127, 2165–2168. [Google Scholar] [CrossRef]
- Virtanen, J.-P.; Hyyppä, H.; Kurkela, M.; Vaaja, M.; Alho, P.; Hyyppä, J. Rapid prototyping —A tool for presenting 3-dimensional digital models produced by terrestrial laser scanning. ISPRS Int. J. Geo-Inf. 2014, 3, 871–890. [Google Scholar] [CrossRef]
- Zhang, F.; Huang, X.; Fang, W.; Zhang, Z.; Li, D.; Zhu, Y. Texture reconstruction of 3D sculpture using non-rigid transformation. J. Cult. Herit. 2015, 16, 648–655. [Google Scholar] [CrossRef]
- Mikhail, E.M.; Bethel, J.S.; McGlone, J.C. Introduction to Modern Photogrammetry; John Wiley and Sons Inc.: Hoboken, NJ, USA, 2001. [Google Scholar]
- Blostein, S.; Huang, T. Estimating 3-D motion from range data. In Proceedings of the 1st Conference on Artificial Intelligence Applications, Denver, CO, USA, 1 February 1984.
- Horn, B.K.P.; Hilden, H.M.; Negahdaripour, S. Closed-form solution of absolute orientation using orthonormal matrices. J. Opt. Soc. Am. A 1988, 5, 1127–1135. [Google Scholar] [CrossRef]
- Arun, K.S.; Huang, T.S.; Blostein, S.D. Least-squares fitting of two 3-D point sets. IEEE Trans. Pattern Anal. Machine Intell. 1987, 5, 698–700. [Google Scholar] [CrossRef]
- Schenk, T. Introduction to Photogrammetry; The Ohio State University: Columbus, OH, USA, 2005. [Google Scholar]
- Umeyama, S. Least-squares estimation of transformation parameters between two point patterns. IEEE Trans. Pattern Anal. Machine Intell. 1991, 4, 376–380. [Google Scholar] [CrossRef]
- Ali, T.; Mehrabian, A. A novel computational paradigm for creating a Triangular Irregular Network (TIN) from LiDAR data. Nonlinear Anal. 2009, 71, e624–e629. [Google Scholar] [CrossRef]
- Chini, M.; Atzori, S.; Trasatti, E.; Bignami, C.; Kyriakopoulos, C.; Tolomei, C.; Stramondo, S. The 12 May 2008, (Mw 7.9) Sichuan earthquake (China): Multiframe ALOS-PALSAR DInSAR analysis of coseismic deformation. IEEE Geosci. Remote Sens. Lett. 2010, 7, 266–270. [Google Scholar] [CrossRef]
- Nguyen, V.T. In Building TIN (triangular irregular network) problem in Topology model. In Proceedings of the 2010 International Conference on Machine Learning and Cybernetics (ICMLC), Qingdao, China, 11–14 July 2010; pp. 14–21.
- Silva, C.T.; Mitchell, J.S.B.; Kaufman, A.E. Automatic generation of triangular irregular networks using greedy cuts. In Proceedings of the 6th Conference on Visualization ’95, Washington, DC, USA, 29 October 1995; pp. 201–208.
- Lu, T. Research on the Total Least Squares and Its Applications in Surveying Data Processing. Ph.D. Thesis, Wuhan University, Wuhan, China, 2010. [Google Scholar]
- Zhao, L.; Huang, S.; Sun, Y.; Yan, L.; Dissanayake, G. ParallaxBA: Bundle adjustment using parallax angle feature parametrization. Int. J. Robot. Res. 2015, 34, 493–516. [Google Scholar] [CrossRef]
- Wang, W.; Wu, J.; Fang, L.; Zeng, K.; Chang, X. Design and implementation of spatial database and geo-processing models for a road geo-hazard information management and risk assessment system. Environ. Earth Sci. 2015, 73, 1103–1117. [Google Scholar] [CrossRef]
- Sun, Y.; Zhao, L.; Huang, S.; Yan, L.; Dissanayake, G. L2-SIFT: SIFT feature extraction and matching for large images in large-scale aerial photogrammetry. ISPRS J. Photogramm. Remote Sens. 2014, 91, 1–16. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Set | Height (m) | Scale | Area (km×km) | Image | Strips | GCPs | CPs | Tie Points |
|---|---|---|---|---|---|---|---|---|
| Test 1 | 2500 | 1:5000 | 200×100 | 13772 | 44 | 315 | 309 | 336362 |
| Test 2 | 5000 | 1:10000 | 200×100 | 3454 | 22 | 88 | 75 | 83830 |
| Test 3 | 7500 | 1:25000 | 200×100 | 1575 | 15 | 35 | 33 | 37094 |
| Test 4 | 9500 | 1:50000 | 200×100 | 996 | 12 | 24 | 22 | 22684 |
| Test 5 | 5000 | 1:10000 | 200×100 | 3454 | 22 | 35 | 33 | 37094 |
| Test 6 | 5000 | 1:10000 | 200×100 | 3454 | 22 | 24 | 22 | 22684 |
| Dataset | Method | RMSE x (m) | RMSE y (m) | RMSE Plane (m) | RMSE z (m) |
|---|---|---|---|---|---|
| Test 1 | CAO | 0.324 | 0.287 | 0.433 | 0.866 |
| PAO | 0.015 | 0.015 | 0.021 | 0.077 | |
| BA–CP | 0.008 | 0.010 | 0.009 | 0.064 | |
| Test 2 | CAO | 0.298 | 0.278 | 0.408 | 0.608 |
| PAO | 0.037 | 0.041 | 0.055 | 0.165 | |
| BA–CP | 0.016 | 0.023 | 0.020 | 0.150 | |
| Test 3 | CAO | 0.329 | 0.354 | 0.483 | 0.640 |
| PAO | 0.055 | 0.059 | 0.080 | 0.297 | |
| BA–CP | 0.025 | 0.036 | 0.031 | 0.270 | |
| Test 4 | CAO | 0.141 | 0.251 | 0.288 | 1.649 |
| PAO | 0.050 | 0.081 | 0.095 | 0.439 | |
| BA–CP | 0.032 | 0.058 | 0.047 | 0.283 | |
| Test 5 | CAO | 0.141 | 0.251 | 0.288 | 1.649 |
| PAO | 0.050 | 0.081 | 0.095 | 0.439 | |
| BA–CP | 0.016 | 0.022 | 0.019 | 0.152 | |
| Test 6 | CAO | 0.141 | 0.251 | 0.288 | 1.649 |
| PAO | 0.050 | 0.081 | 0.095 | 0.439 | |
| BA–CP | 0.017 | 0.023 | 0.020 | 0.147 |
| Methods | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 | Test 6 |
|---|---|---|---|---|---|---|
| CAO | 0.013 | 0.011 | 0.008 | 0.005 | 0.009 | 0.009 |
| PAO | 3.930 | 0.272 | 0.066 | 0.022 | 0.265 | 0.272 |
| Method | RMSE x (m) | RMSE y (m) | RMSE Plane (m) | RMSE z (m) |
|---|---|---|---|---|
| CAO | 0.650 | 0.973 | 1.170 | 12.485 |
| PAO | 0.302 | 0.325 | 0.444 | 3.250 |
| BA–CP | 0.251 | 0.392 | 0.329 | 1.278 |
| Test 1 | Test 2 | Test 3 | Test 4 | Real Data | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| q | Plane | Plane | Plane | Plane | Plane | |||||
| 0 | 1.321 | 8.973 | 1.359 | 26.474 | 4.919 | 86.501 | 6.135 | 178.301 | 1.452 | 54.439 |
| 3 | 0.043 | 1.300 | 0.118 | 3.298 | 0.821 | 21.637 | 0.892 | 32.706 | 0.404 | 12.213 |
| 5 | 0.022 | 0.825 | 0.059 | 3.035 | 0.592 | 16.752 | 0.325 | 16.675 | 0.485 | 12.487 |
| 7 | 0.022 | 0.690 | 0.058 | 2.746 | 0.476 | 14.344 | 0.221 | 14.485 | 0.511 | 12.682 |
| 10 | 0.021 | 0.547 | 0.058 | 2.284 | 0.319 | 10.489 | 0.142 | 11.029 | 0.503 | 11.591 |
| 20 | 0.021 | 0.288 | 0.056 | 1.124 | 0.093 | 3.359 | 0.098 | 4.557 | 0.445 | 6.636 |
| 30 | 0.021 | 0.155 | 0.056 | 0.507 | 0.080 | 1.396 | 0.096 | 2.151 | 0.435 | 4.175 |
| 40 | 0.021 | 0.098 | 0.055 | 0.256 | 0.080 | 0.616 | 0.095 | 1.073 | 0.439 | 3.451 |
| 50 | 0.021 | 0.081 | 0.055 | 0.182 | 0.080 | 0.352 | 0.095 | 0.611 | 0.442 | 3.282 |
| 60 | 0.021 | 0.077 | 0.055 | 0.165 | 0.080 | 0.297 | 0.095 | 0.439 | 0.444 | 3.250 |
| 70 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | 0.445 | 3.252 |
| 80 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | 0.446 | 3.261 |
| 90 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | 0.447 | 3.270 |
| 100 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | 0.447 | 3.278 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, L.; Wan, J.; Sun, Y.; Fan, S.; Yan, Y.; Chen, R. A Novel Absolute Orientation Method Using Local Similarities Representation. ISPRS Int. J. Geo-Inf. 2016, 5, 135. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5080135
Yan L, Wan J, Sun Y, Fan S, Yan Y, Chen R. A Novel Absolute Orientation Method Using Local Similarities Representation. ISPRS International Journal of Geo-Information. 2016; 5(8):135. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5080135
Chicago/Turabian StyleYan, Lei, Jie Wan, Yanbiao Sun, Shiyue Fan, Yizhen Yan, and Rui Chen. 2016. "A Novel Absolute Orientation Method Using Local Similarities Representation" ISPRS International Journal of Geo-Information 5, no. 8: 135. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5080135