1. Introduction
Following the developments of information techniques, it became necessary to automate tasks that were previously manual such as map generalization between various representations used for digital cartography and/or geographical information science (GIS).
As one of the key operators of map generalization, line generalization is considered one of the most complex processes in cartographic data production [
1]. It is a data reduction process used to (a) improve the display quality; (b) allow data analysis with different degrees of detail; and (c) reduce data storage requirements when for example the scale is decreased. Given a cartographic curve, a line simplification algorithm aims to generate simplified cartographic lines with lower granularity without changing the amount of geographic features and destroying their essential shapes or salient characters [
1,
2,
3,
4,
5].
Due to the fact that most geographic features use lines as the basic entity for their representation on typical cartographic maps, the topic of line simplification has been widely and deeply investigated in the past decades [
6,
7,
8,
9]. Previous research has yielded a number of algorithms to reduce the granularity of lines while preserving the major geometric characteristics [
10,
11,
12].
The classic Douglas-Peucker (DP) algorithm, known as one of the most popular line simplification methods, can select important vertices based on a predefined tolerance distance [
13]. After removing the unimportant vertices, the curve simplified by DP algorithm could be displaced by a distance up to the predefined tolerance and therefore may lose proper topological relationships to itself (self-intersection) and/or other geographic features lying very near. Extending the DP algorithm, Saalfeld [
14] has provided an efficient rule for selecting some specific vertices to be added to the simplified feature, which helps to avoid potential topological conflicts of the feature with itself and other nearby features. Instead of relying on the tolerance distance employed by DP algorithm, Visvalingam and Whyatt [
15] suggest to remove the vertices forming the triangles with smallest “effective area” for the task of line simplification. In some situations, however, the Visvalingam and Whyatt (VW) algorithm fails to produce reasonable simplified results because the shape of the measured triangle is not taken into consideration. For instance, a very flat triangle and a very tall triangle of the same area are treated as having the same cartographic significance. To overcome this deficiency, the “weighted effective area” has been implemented to improve the performance of the original VW algorithm in Zhou and Jones [
16]. Different from the DP and VW algorithm, Li and Openshaw [
17] attempt to realize the line simplification by simulating the natural process by which people observe the objects. This algorithm is based on the so-called natural principle and uses a ratio of input and target resolution to define the “smallest visible object”, which can be employed as a significant criterion to detect and retain the overall shape of a line.
Moreover, Nabil Mustafa et al. [
18] presented a so-called Voronoi diagram method, which first divides a complex cartographic curve into a series of safe sets and then simplifies each safe set by using the algorithms such as DP and VW. In this way, it avoided intersections among the lines input. However, Yang et al. [
19] argued that such a Voronoi-diagram-based method cannot guarantee the computational precisions and may result in self-intersections. Nöllenburg et al. [
11] studied polylines morphing at different scales, which can help to realize continuous generalization for linear geographical features like roads and rivers. Park and Yu [
20] proposed a hybrid line simplification method, which has been proved to result in better performance than the single simplification algorithms in terms of the vector displacement. Stanislawski et al. [
21] discussed various metric assessments such as segment length, sinuosity, areal displacement, vector displacement and Hausdorff distance for automated line simplification in humid landscapes, which may guide more appropriate parameter-settings over a range of reduced map scales and geographic conditions. Besides, Raposo [
22] developed a scale-specific automated line simplification algorithm by vertex clustering on a hexagonal tessellation, which bears similarities to the Li-Openshaw algorithm, with three key differences in terms of sampling geometry, mathematical relation to target scale and line weight, and method of quantization of vertices from multiple line passes within a tessera. Mostly due to the superior radial symmetry and isotropy of the honeycomb sampling geometry, this algorithm offers significantly greater positional fidelity.
In order to achieve the transition from simplification to generalization of natural occurring lines, the approach proposed by Nakos et al. [
10] does not only perform the line simplification alone, but also together with the operations of data smoothing, exaggeration, typification, enhancement or any combination of them. Their research constituted great progress towards the full-life-circle data generalization with high automation. Besides contributions on line simplification algorithms, Mustière et al. [
23] set up the strategies on how to evaluate the legibility of symbolized lines so as to detect the non-legible part of a line network, which is crucial to the evaluation of data quality after line simplification.
The reported algorithms in the literature so far have doubtlessly paved the way to the development of comprehensive approaches for automatic line simplification. However, unsatisfactory simplified results still exist especially in cases when (a) the cartographic lines to be simplified are too long and too tortuous to be dealt with as a whole; (b) the geometric and/or topologic characteristics of the cartographic lines are so different to each other that it is hard to use a unified parameterization to deal with all of them; and (c) after data simplification, one U-shaped sinuosity tends to be changed to be V-shaped by many currently available algorithms, and vice versa. These problems become more serious when contour lines are processed. This is because the contour lines have continuous natural bending and thus have a more complex structure with much higher bending degree comparing to some other types of line features, such as roads, rivers, power lines, etc.), which can bring more difficulties to line simplifications. Thereby, this article proposes a new data simplification approach for contour lines, which is based on a so-called ODC (Oblique Dividing Curve) method and operates iteratively.
The remainder of this article is organized into 4 parts: (i)
Section 2 illustrates the new concept and principles of the so-called OCD method and points out its advantages for the task of line simplification; (ii) in
Section 3, the strategy of the iterative line-simplification approach based on OCD method is described in details; (iii)
Section 4 reports the experiments applying the proposed approach on a number of real-world data and evaluates the proposed approach in comparison to some other algorithms; and (iv)
Section 5 discusses the overall performance and potential improvements of the proposed approach. To avoid tedious descriptions, the terminologies of “polyline and cartographic line”, “sinuosity and bend”, “division and segmentation” are utilized interchangeably.
2. The Oblique-Dividing-Curve (ODC) Method
In case one cartographic line (e.g., contour line) is very long and/or involves many sinuosity, the line needs to be divided into a series of shorter curves (parts) according to certain geometric and topologic characteristics and then each curve should be treated differently in the process of line simplification.
Hoffman and Richards [
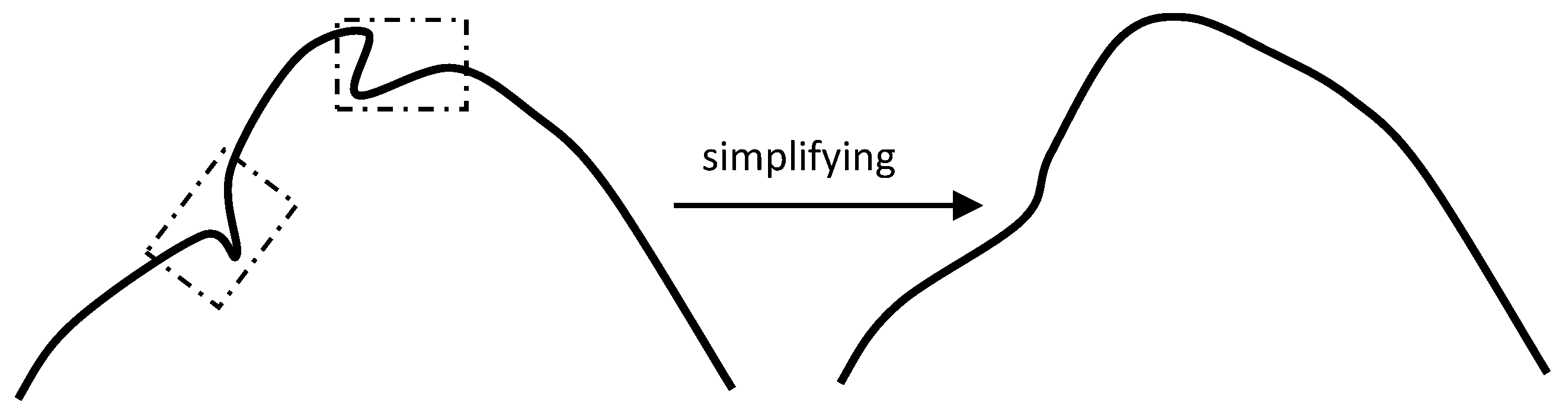
24] pointed out that the cartographic lines can be cut at minima of curvature. However, the positions of the minima of curvature are not invariant under a change in the direction of traversal, which indicates that the divided curves as specified in its representation can be very different when the orientation is reversed (see
Figure 1). Thus, the simplification operation can only consider the bending characters either at “peaks” or “bottoms”, which may lead to quite different simplified results even if the same algorithm has been implemented.
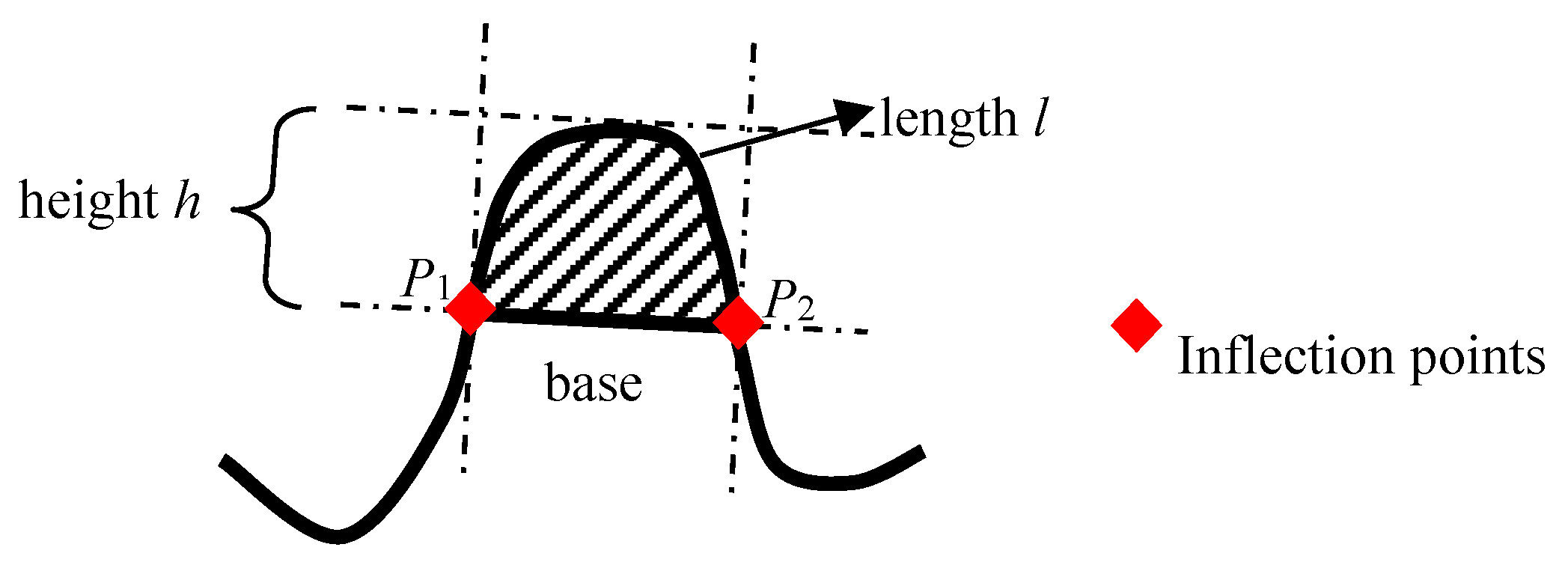
Such an undesirable condition has been refined by Plazanet et al. [
25], in which the inflection points are selected as potential locations for line segmentation. After the division, a set of measurements, including the curve height
h, the curve length
l, the Euclidean distance
base between the inflection points, etc., are utilized for the sinuosity classification (see
Figure 2). For a given curve, the mean values or median values are computed for all these measurements and then fed into a classical hierarchical clustering process—the sinuosity in different clusters will trigger different simplification strategies, depending on the characteristics. In this way, the performance of line simplification has been dramatically enhanced.
Mitropoulos and Nakos [
26] developed a model following the framework of “segmentation, classification and generalization”, where the cartographic lines are divided based on the ɛ-convexity technique introduced by Perkal [
27], where a disc with the diameter ε rolls on a cartographic line and thus generate the segmentation points to divide the polyline into ε-convex and ε-non-convex parts. In this work, the parameter corresponds to the size of diameter ε and it is equal to the sum of the visual separation limit, the width of line symbol and a tolerance value expressed at the target scale, which is independent of any individual intervention at a given generalization task.
As depicted above, most of the dividing methods in existing literature are statically operated. That is, after the segmentation, the dividing points remain unchanged during the whole process of the data simplification. Thus, discrete distortions around the dividing points may result and the whole cartographic line could become unsmooth at the dividing points after the data simplification.
To fill this gap in existing studies, the authors have developed a brand-new dividing method in this article, termed as the Oblique-Dividing-Curve (ODC) method (see detailed illustrations from
Section 2.1,
Section 2.2 and
Section 2.3). Different from existing dividing methods that are mostly static, the ODC method is a dynamic dividing method that implements an iteratively-processed strategy for line segmentation. That is, whenever a curve is simplified, the whole cartographic line will be re-divided and the line simplification process restarts again (ref.
Section 3.3).
2.1. Basic Principle of the ODC Method
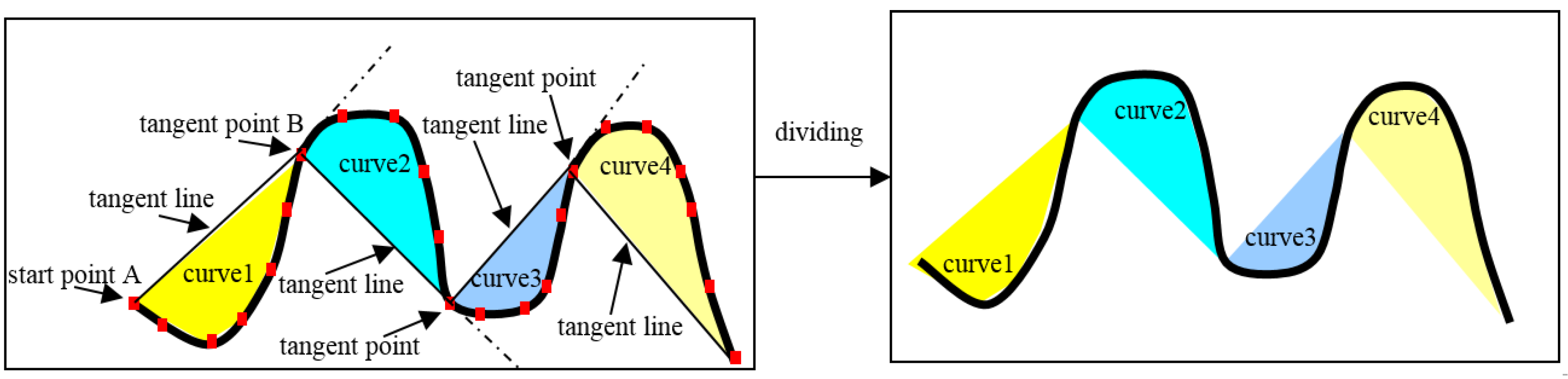
The principle of the ODC method can be depicted by
Figure 3. First, point A on the cartographic line is randomly selected as the starting point. Starting from point A, the tangent can be drawn to its nearest bend. Thus, the segment between point A and the point of tangency (viz. point B) forms a new curve (viz. curve 1). In other words, the initial cartographic line is divided into two parts—curve 1 and the rest. Then, point B is treated as the new “starting point” and the rest of the cartographic line can be divided analogously (see curves 2~4 in
Figure 3). After the division, the generated curves (see curve 1~4 in
Figure 3) involve not only peaks but also valleys.
Note that the terms of “tangent” and “point of tangency” mentioned in this article do not comply with the strict mathematical definition. Instead, they are deployed to illustrate the general concepts/ideas for the line division. Specific computing principle to identify such “tangent” and “point of tangency” can be found in steps 3~4 in
Section 2.2.
One of the key factors in the line-simplification process is to keep the general geometric characteristics of the bending parts of a cartographic line. As illustrated by
Figure 4, no matter which direction the ODC method starts from, the geometric characteristics of both ‘bottoms’ and ‘peaks’ can be commendably retained, which indicates the ODC method can consider more comprehensive geometric characteristics comparing to some traditional methods of ‘line segmentation’.
2.2. Schematic Process of the ODC Method
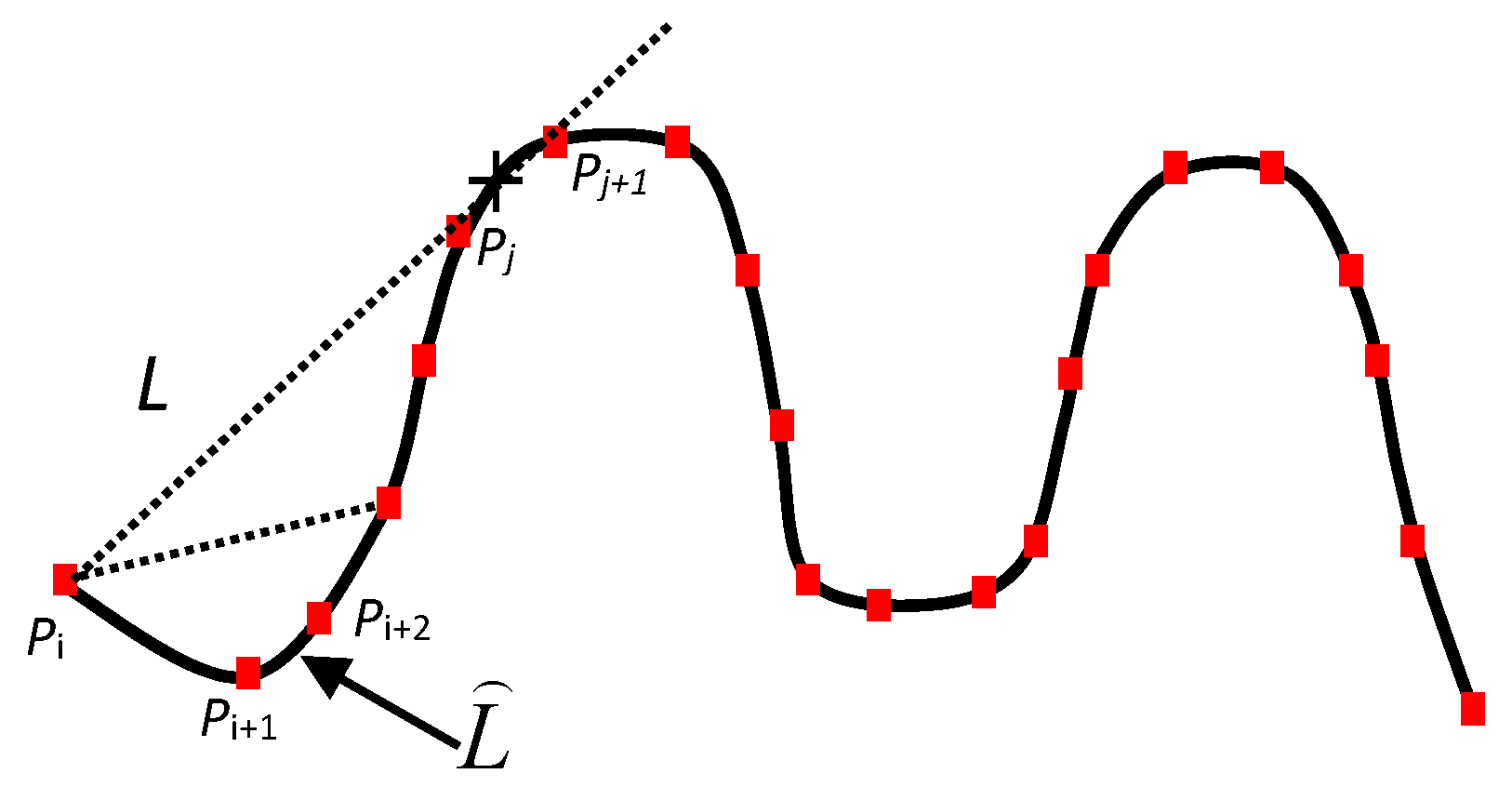
Let
represent the cartographic line to be simplified,
Lij represent the straight line connected by the points
Pi and
Pj, and
represent the curve formed by the points
Pi,
Pi + 1,
Pi + 2, ...,
Pj, where
and
N is a natural number larger than 2 (see
Figure 5). Then, the ODC methods can be characterized by the following steps:
Step 1: Select one of the point Pi on the cartographic line as the starting point. Set j = i + 3, if , set j = n and jump to step 5; otherwise, go to the next step.
Step 2: Judge whether Lij and intersect to each other, which can be realized by a loop computation: initially, set p = i, q = p + 1; if Lij and Lpq intersect, Lij and are considered as ‘intersect’ as well and at the same time the loop computation is terminated; otherwise, set p = p + 1 and continue the computation until q = j.
Step 3: If Lij and do not intersect and j < n, set j = j + 1 and return to step 2;
Step 4: If Lij and intersect to each other and j < n, set j = j − 1 and save as one curve divided by the ODC method; set i = j and re-execute the step 1~4 analogously.
Step 5: If j = n, should be saved as the last curve divided by the ODC method. Now the division process is terminated.
Note that in
Figure 5, the
Pj is regarded as the point of tangency for the division because that
and
Lij + 1 cross each other.
After the process illustrated above, the polyline to be simplified will be divided into a series of shorter curves. Each of them (except the last one) consists at least of four points and the points do not overlap to each other. The ODC method employs oblique tangents to divide the whole polyline, which is why it is termed as Oblique-Dividing-Curve method.
2.3. Characteristics of the ODC Method
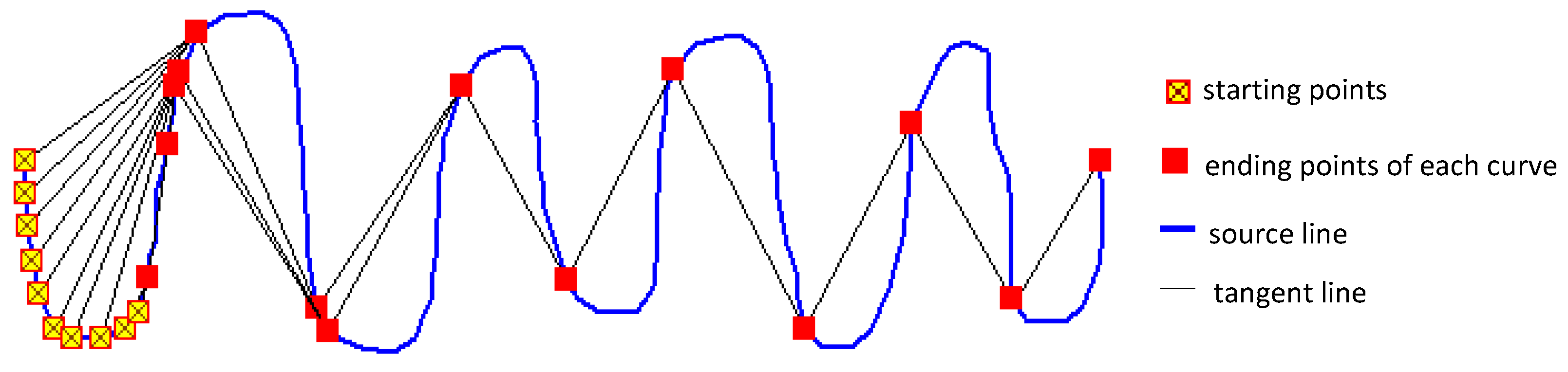
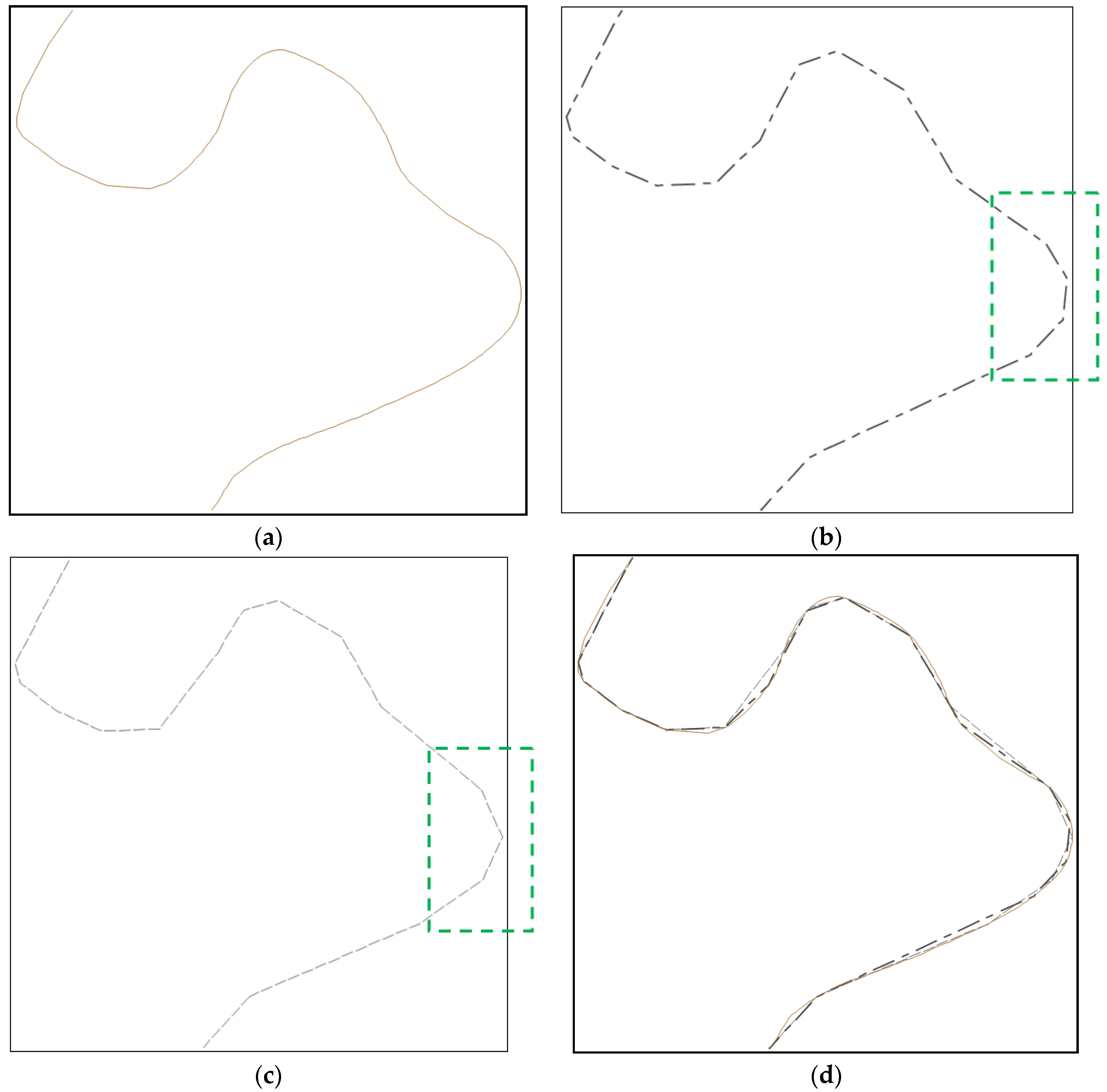
To demonstrate the “stableness nature” of the ODC method, it is necessary to compare and analyze the final division results when different starting points are selected. A large number of experiments demonstrate that choosing different starting points will lead to nearly the same division results although the first several divided curves will be a bit different.
For example, as depicted by
Figure 6, when different starting points are selected, only the first three divided curves are slightly different while all the others are same, which shows that the ODC method provides generic and robust performance for line divisions due to the fact that the selection of the starting points almost has no influence on the overall final division results. For contour lines, this kind of generic nature is important because the contour lines are normally closed, which means the natural starting points do not exist at all. Certainly, if one cartographic line is not enclosed, then it is better to start the division process from one of the endpoints of the line.
3. Methodologies for Line Simplification
3.1. Classification of the Divided Curves
In the proposed line-simplification approach, the curves divided by the ODC method will be classified into different groups for further processing according to both of their shapes and sizes.
3.1.1. Identification of the U and V-shaped Curves
In terms of polylines’ shape, the curves resulted from the division can be categorized into U or V-shaped. The curves in different shapes should trigger different strategies for the line simplification.
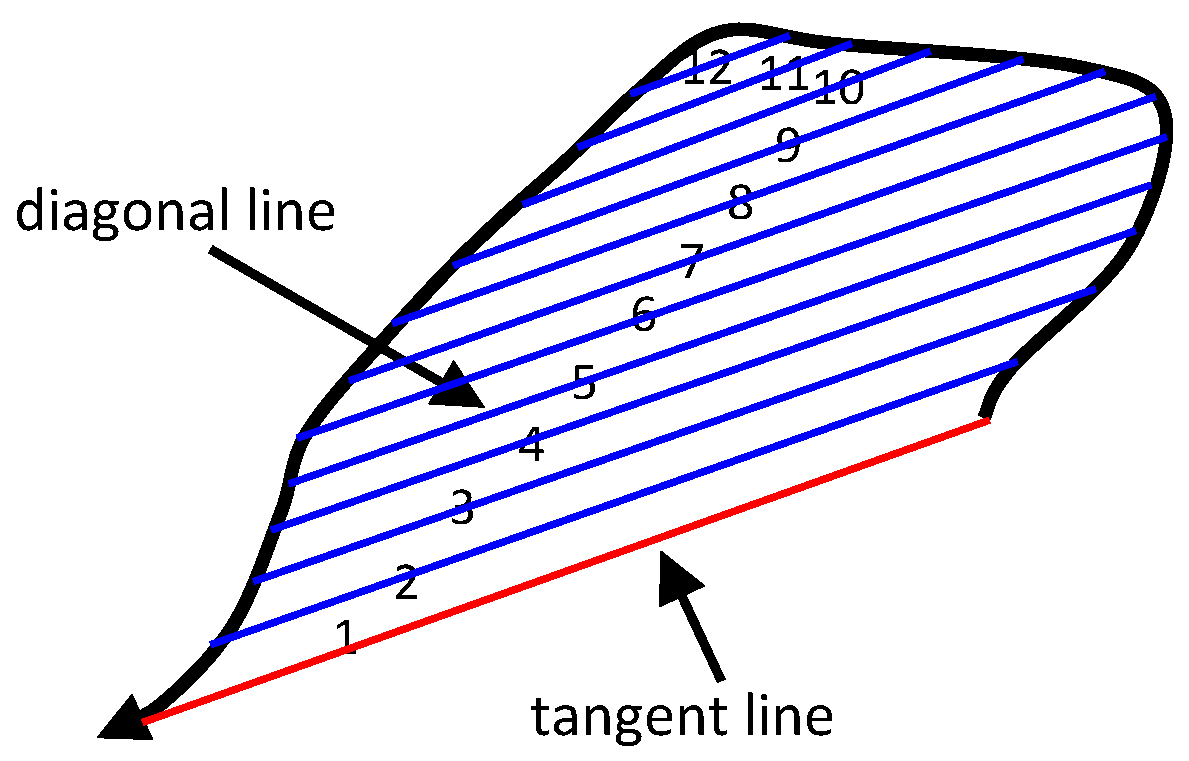
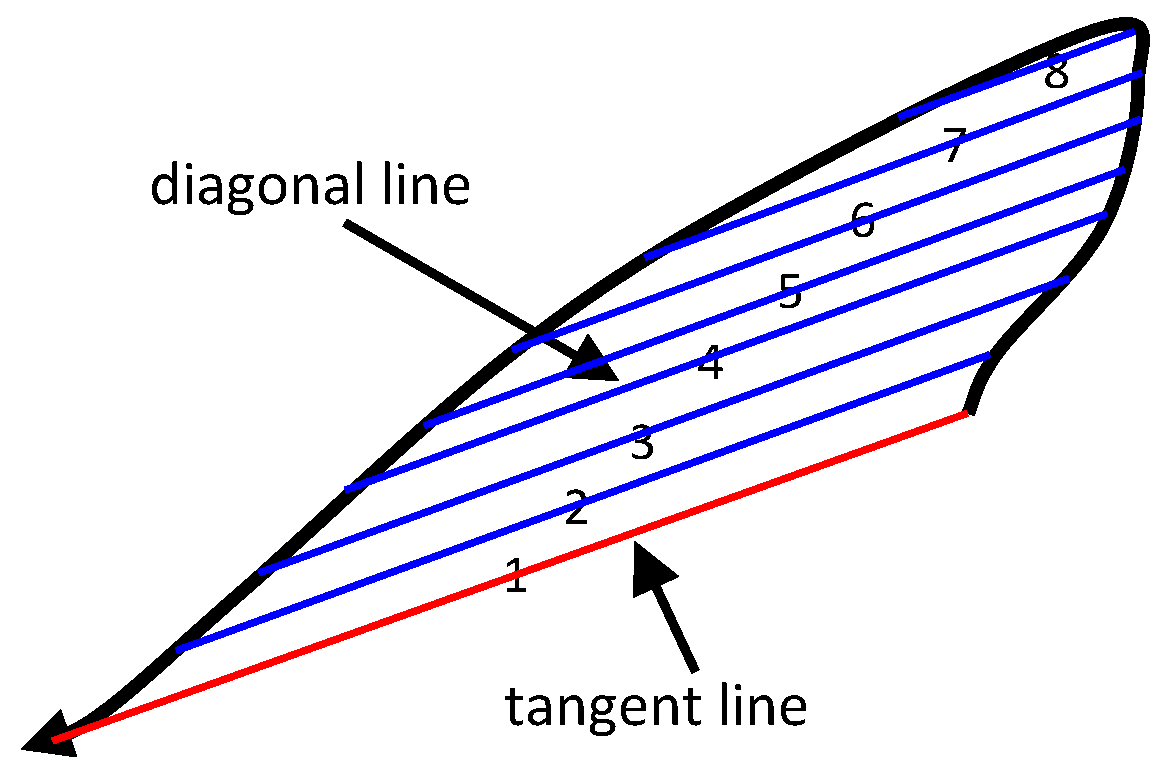
The process to identify the U or V-shaped curves is illustrated in
Figure 7 and
Figure 8, where
Figure 7 depicts a typical U-shaped curve and
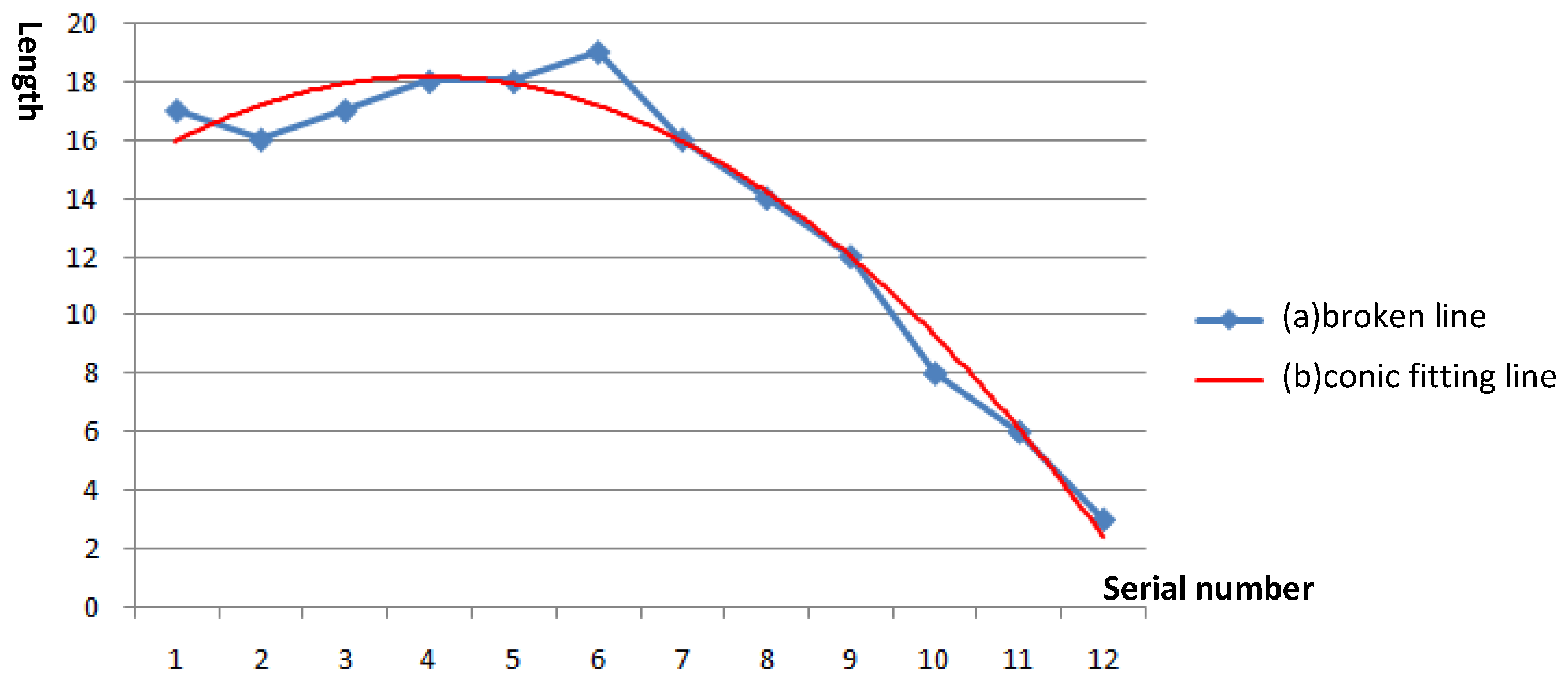
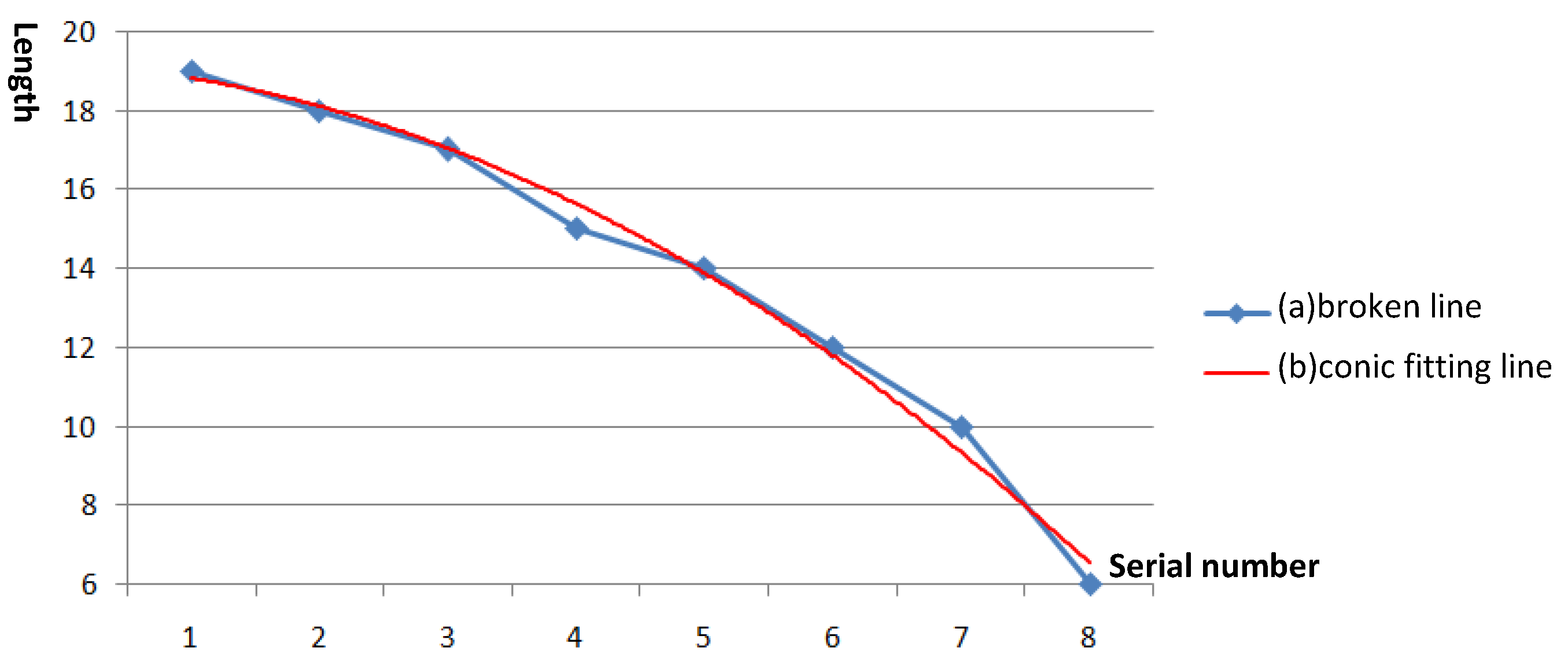
Figure 8 depicts a typical V-shaped curve. First, along the direction of the tangent line, the inner space of each curve is divided by a set of diagonal lines parallel to the tangent line. Then the lengths of all the diagonal lines are measured and recorded. Let
x represent the serial number and
y the length of the diagonal lines, two broken-line graphs can be drawn to respectively represent the changing trends of the diagonal lines of the U and V-shaped curves (see
Figure 9a and
Figure 10a).
Based on the fitting algorithm of Least Square for Curves, the broken-line graphs of
Figure 9a and
Figure 10a can be converted to the conics defined by Formulas (1) and (2), see the corresponding graphs in
Figure 9b and
Figure 10b.
As illustrated by
Figure 9b and
Figure 10b, the changing trends of the diagonal lines’ lengths of the U and V-shaped curves are different from each other—the fitting conic of the U-shaped curve has a larger curvature than that of the V-shaped curve. The average curvature of the fitting conics is used to differentiate the U and V-shaped curves. See details below:
Setting the standard conic function as in Formula (3), the curvature at a certain point
xi can be represented by (
xi) in Formula (4).
where,
y′ and
y″ represent the first and second -order derivatives of
y.
Then, Formula (5) can be employed to calculate their average curvatures:
where,
n is the number of diagonal lines,
.
As
and
, Formula (5) can be replaced by Formula (6):
According to Formula (6), the average curvature for the U and V-shaped curves can be respectively calculated as follows:
= 0.153356 (a = −0.2468 and b = 1.9770, ref. Formula (1) of the U-Shaped curve); and
= 0.075298 (a = −0.172 and b = −0.1964, ref. Formula (2) of the V-Shaped curve).
It is obvious that is larger than .
After a large number of experiments, it is found that curves with the larger than 0.1 can be regarded as U-shaped while those with small than or equal to 0.1 (viz. ) can be classified as V-shaped.
3.1.2. Methods to Differentiate the Large, Small and Minimum Curves
In order to get more reasonable simplification results, the curves with different sizes should be treated differently as well. In the proposed approach, one curve can be classified as large, small or minimum following the method discussed below.
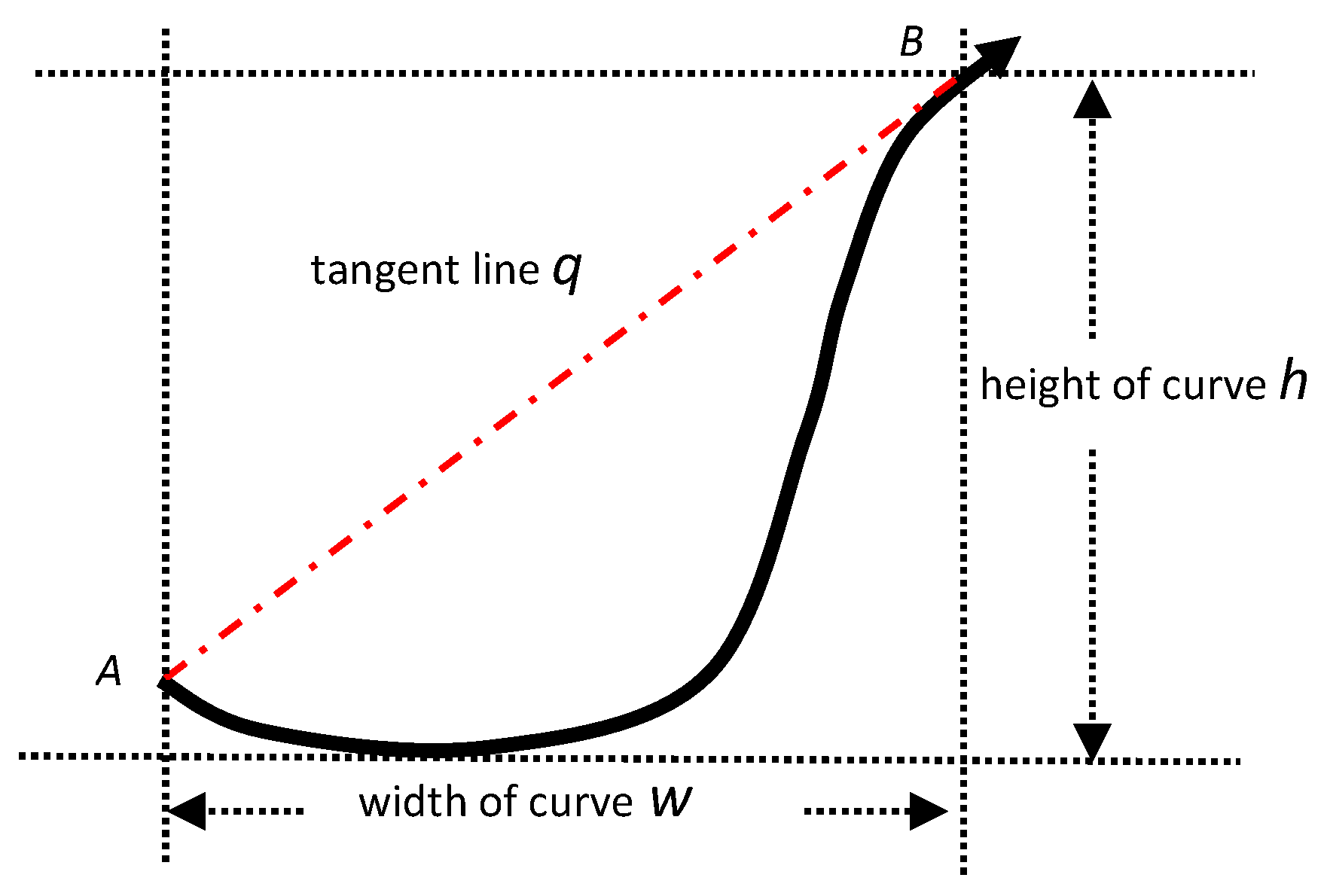
Figure 11 shows that the size of a curve is mainly determined by its height
h and width
w. As illustrated by
Table 1, if
h is larger than a certain threshold
h1 or
w is larger than a certain threshold
w1, the curve should be treated as ‘large’; otherwise it will be treated as ‘small’ or ‘minimum’ (ref.
Table 1). In the process of real-world data production, however, it could be complicated and take a lot of precious computing resources to calculate
h and
w.
Considering that the length of the tangent
q is positively correlated with
h and
w and can be roughly calculated by
, the criteria based on
q can be employed to differentiate the size of one curve. As illustrated by
Table 2, if
q is larger than a certain threshold
qL, the curve should be treated as ‘large’; otherwise it will be treated as ‘small’ (
qs ≤
q ≤
qL) or ‘minimum’ (
q <
qs), where assigning proper values to
qs and
qL becomes one of the pivotal issues to ensure the quality of the final results.
Assuming that all of the cartographic lines to be simplified have been divided into
n curves in total and all these curves have been sorted based on their tangents’ lengths (viz.
q) from small to large as
, the thresholds of
qs and
qL can be experimentally settled according to the Formulas (7)~(9):
where,
n represents the number of all of the curves;
represents the initial scale of the source data;
represents the target scale after data generalization;
j is a natural number calculated according the round method;
K is a natural number, which can be settled between 3 and 10 experimentally.
It is not hard to find that (i) Formula (7), viz. the square root law [
28], which has been widely used in the process of data ”selection”, is employed to identify the threshold of
qs; and (ii) the larger the
K is, the smaller the
qL is and the more curves will maintain their “large” characteristic. The large curve will remain as “large” after data simplification (ref. the
Section 3.2.1 and
Section 3.2.2) and thus it can keep more original geometric characteristics (e.g., shape, orientation, etc.) of the whole cartographic line.
3.2. Customized Simplification Methods for Different Kinds of Curves
In this article, the Douglas-Peucker (DP) algorithm is employed as the “basis” to simplify the curves. The standard DP algorithm can be characterized by the following steps: (a) connect the starting and end points of the polyline with a straight line; (b) calculate distances of all the points to the straight line and find out the maximum distance value
dmax; (c) compare with
dmax and a given threshold
D (viz. tolerance distance). If
dmax <
D, delete all points between the starting point and the end point of the polyline; otherwise, divide the whole polyline into two parts according to the point having
dmax and reuse the same method to the divided parts repeatedly [
13,
29].
Clearly, the standard DP algorithm can sometimes result in sharp bends and destroy the crucial geometric characteristic after data simplification. With the aid of the ODC method, different kinds of curves resulted from the division will be dealt with differently which can enhance the simplification performance dramatically, especially for contour lines (see the experiments in
Section 4). In fact, the proposed simplification approach does not necessarily make use of the DP algorithm, i.e., other popular algorithms for line simplifications (e.g., the VW algorithm) can be employed here as well.
As mentioned above, the curves generated by the ODC method could be categorized into different groups according to their shapes and sizes. Different kinds of curves, however, will follow different disciplines in the process of line simplification (ref.
Section 3.2.1,
Section 3.2.2,
Section 3.2.3 and
Section 3.2.4).
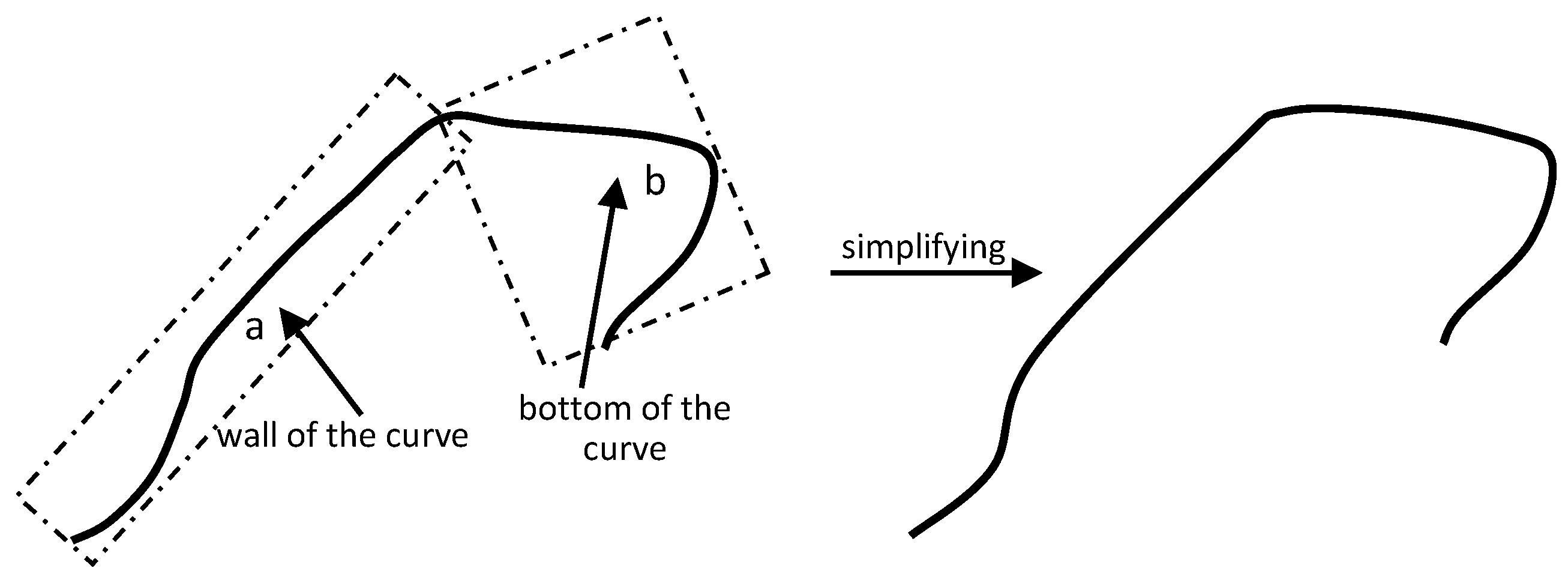
3.2.1. Simplification of the Large U-Shaped Curves
In the process of simplifying the large U-shaped curves, two requirements should be satisfied: one is to retain the whole size of the curves and the other is to ensure that U-shaped curves be still U-shaped after being simplified. To accomplish these two requirements, the wall of the curve can be simplified to a large extent (see the example of “a” in
Figure 12), while on its bottom only small sinuosity should be simplified (see the example of “b” in
Figure 12).
According to Formulas (10) and (11), this result can be obtained by the adjustment of the tolerance distance of the DP algorithm.
where, “
D” represent the “tolerance distance” settled for the whole simplification approach; “2.0” is an empirical coefficient.
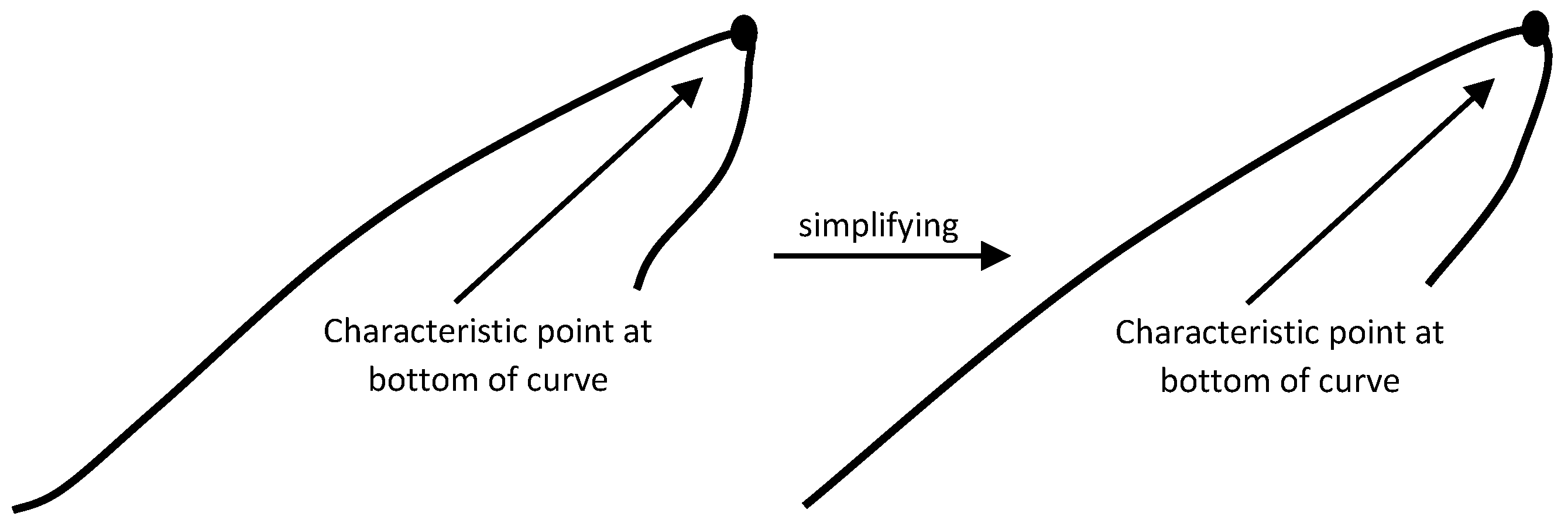
3.2.2. Simplification of the Large V-Shaped Curves
Comparing to U-shaped curves, the geometric characteristics of V-shaped curve can be easily kept because it is almost not possible to convert the V-shape curves to U-shape unless the characteristic points on the cusp are removed. Therefore, as long as the characteristic points on the cusp are preserved, large V-shaped curves can be simplified adequately, see the example in
Figure 13. For the V-shaped curves, the tolerance distance of the DP-algorithm can be settled as “1.5 ×
D”, where “1.5” is an empirical coefficient.
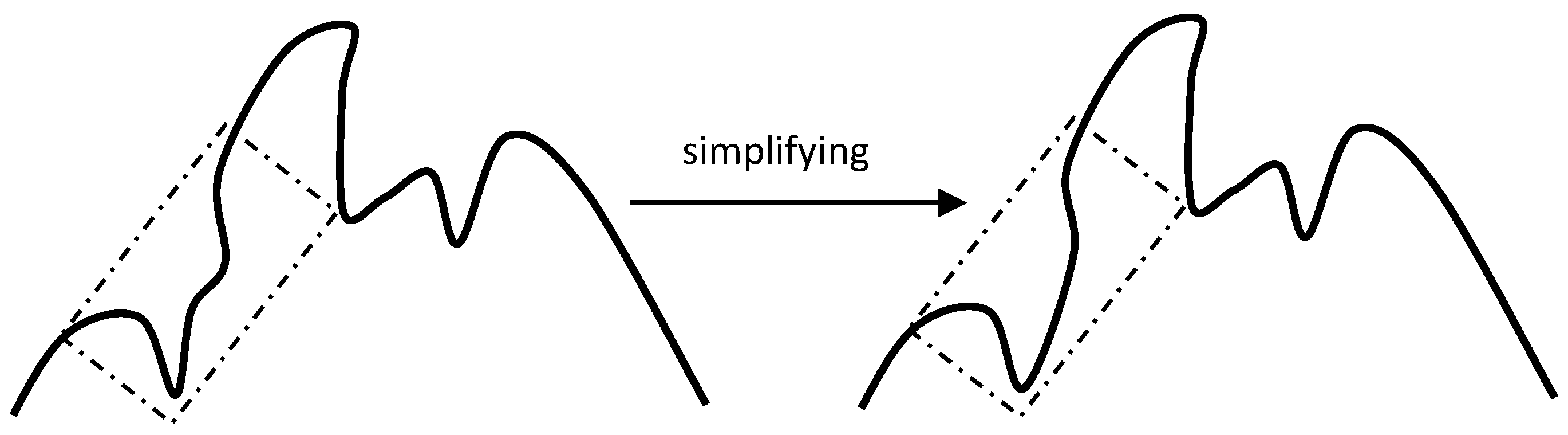
3.2.3. Simplification of the Small U and V-Shaped Curves
As small curves (incl. U and V-shaped) do not have prominent influences on the holistic shape of the whole cartographic line to be simplified, they can be simplified with the standard DP algorithm without any further constraint (see the examples in the dot-dashed box of
Figure 14), where the “tolerance distance” of the DP algorithm is equal to “
D”.
3.2.4. Simplification of the Minimum U and V-Shaped Curves
Curves with minimum size, no matter they are U or V-shaped, have nearly no influence on the holistic shape of the whole cartographic line to be simplified. Therefore, the minimum curves are directly eliminated in the proposed approach, where the ‘elimination of the curve’ refers to ‘connecting the starting and ending points and removing all the other turning points of the curve in between’ (see the examples in
Figure 15).
3.3. Schematic Process of the Overall Line Simplification
Let l represent the curve to be simplified and f(l) represent the simplification operation conducted on l. If l has been successfully simplified by f(l), which indicates that the shape of l has been changed, then the value of f(l) is set to 1 (viz. f(l) = 1); otherwise f(l) = 0. With such a definition, the proposed approach for the line-simplification can be illustrated by the following iteratively operated eight steps.
Step 1: According to the ODC method, divide the cartographic line to be simplified into n curves, denoted as {l1, l2, …, li, … ln} ().
Step 2: Set i = 0 and start the processes of line simplification.
Step 3: Judge whether
li is U-shaped or V-shaped based on the criteria defined in
Section 3.2.1.
Step 4: Judge whether
li is large, small or minimum based on the criteria defined in
Section 3.2.2.
Step 6: If f(li) = 1 (viz. li’ ≠ li), replace li by li’ and return to step 1 for the re-execution of the ODC-division and the line simplification.
Step 7: If f(li) = 0 (viz. li’ = li) and i < n, let i = i + 1 and return to step 3.
Step 8: If f(li) = 0 (viz. li’ = li) and i = n, stop the iteration and terminate the simplification process.
As mentioned in Step 5, the case where f(li) = 1 will always lead to a re-division of the whole cartographic line as well as the re-execution of the line-simplification process. The reason is that the change of li will influence the geometric/topologic characteristics of its neighbours and therefore a re-division becomes necessitated for better simplification results.
5. Conclusions
In this article, a new line-simplification approach based on the Oblique-Dividing-Curve (ODC) method has been proposed. With this approach, one cartographic line to be simplified can be firstly divided into a chain of shorter curves by the ODC method. According to their geometric characteristics regarding shapes and sizes, the curves are categorized into four groups: “large U-shaped”, “large V-shaped”, “small” and “minimum”. Then, the curves in different groups trigger different rules and criteria for line simplification.
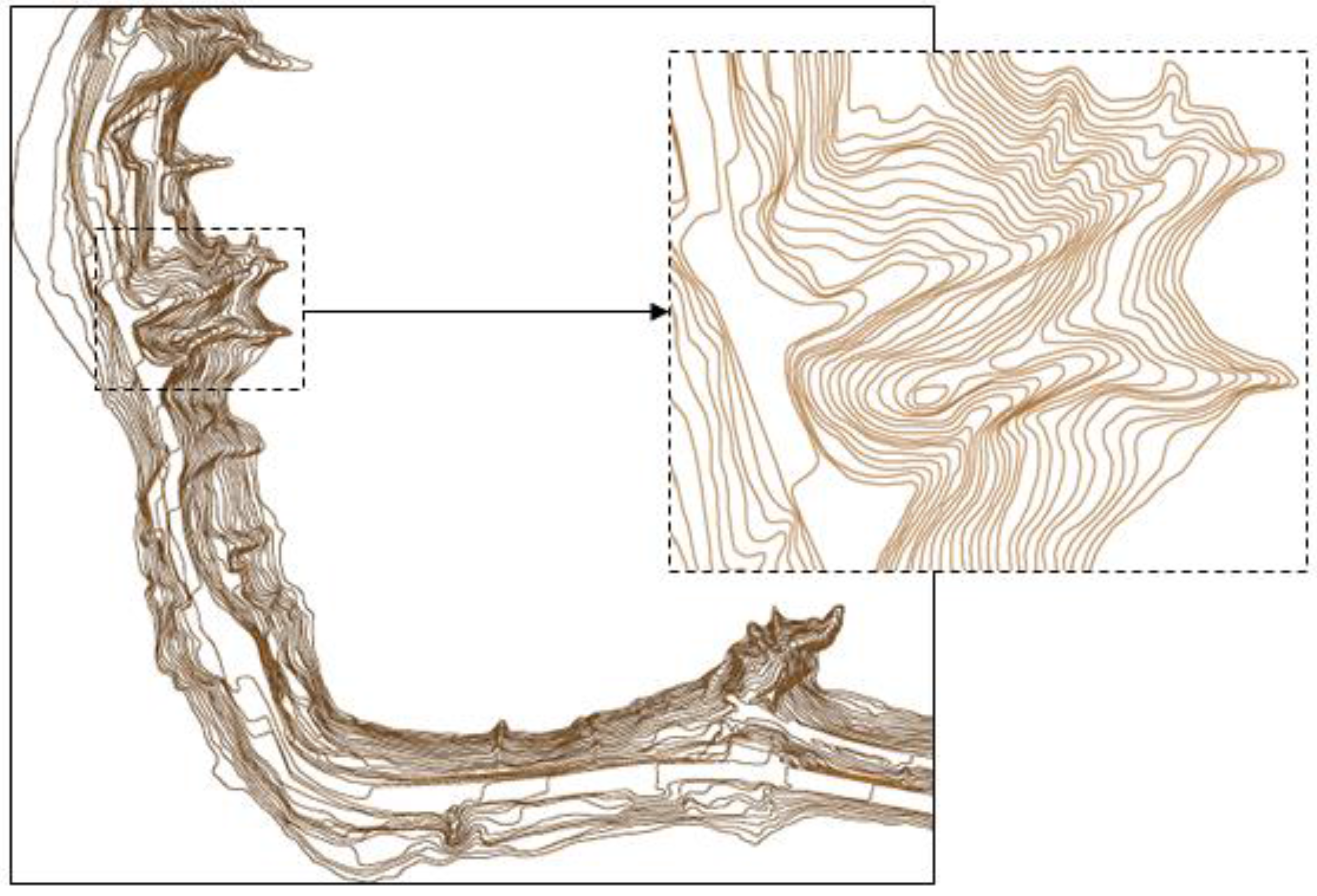
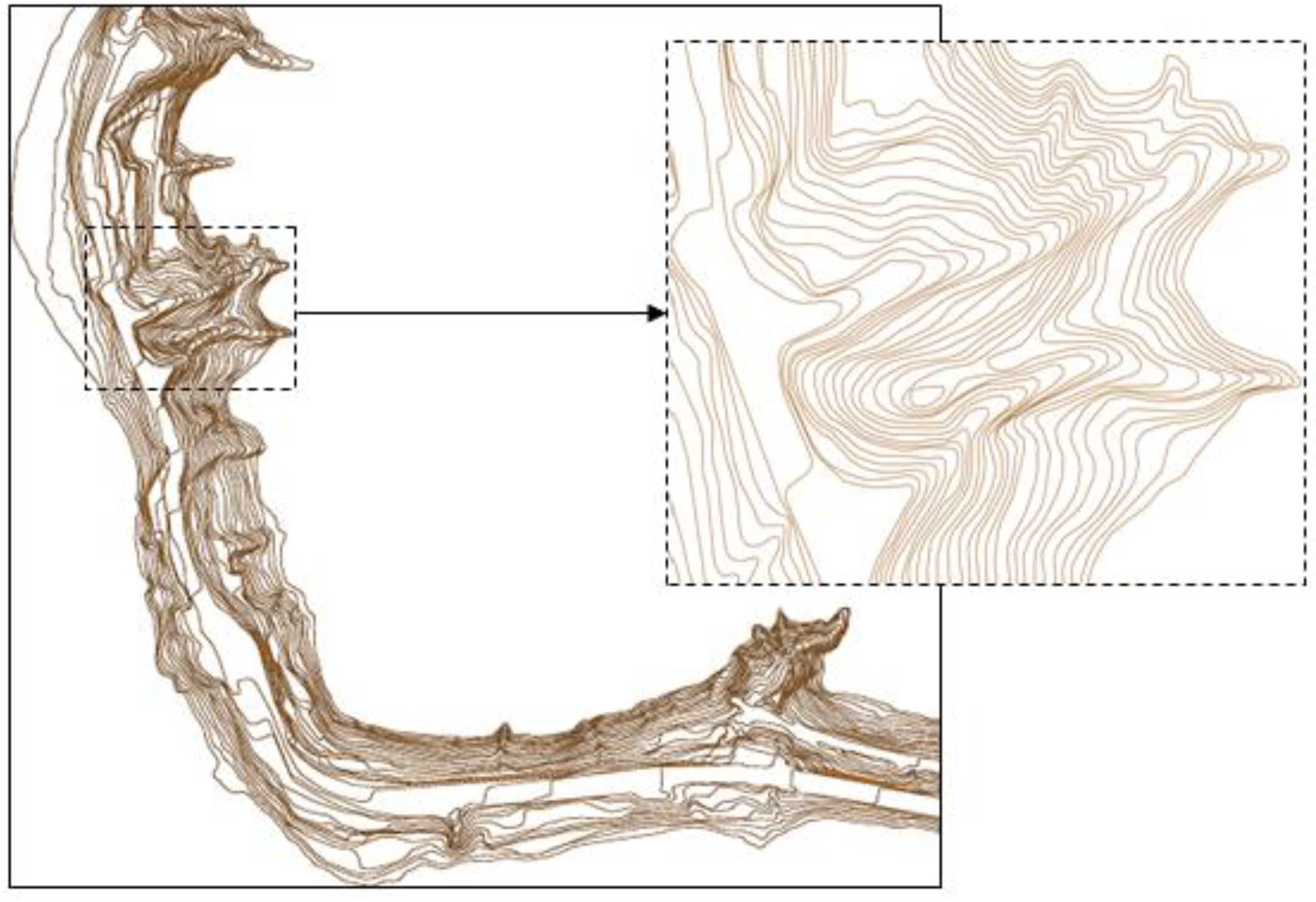
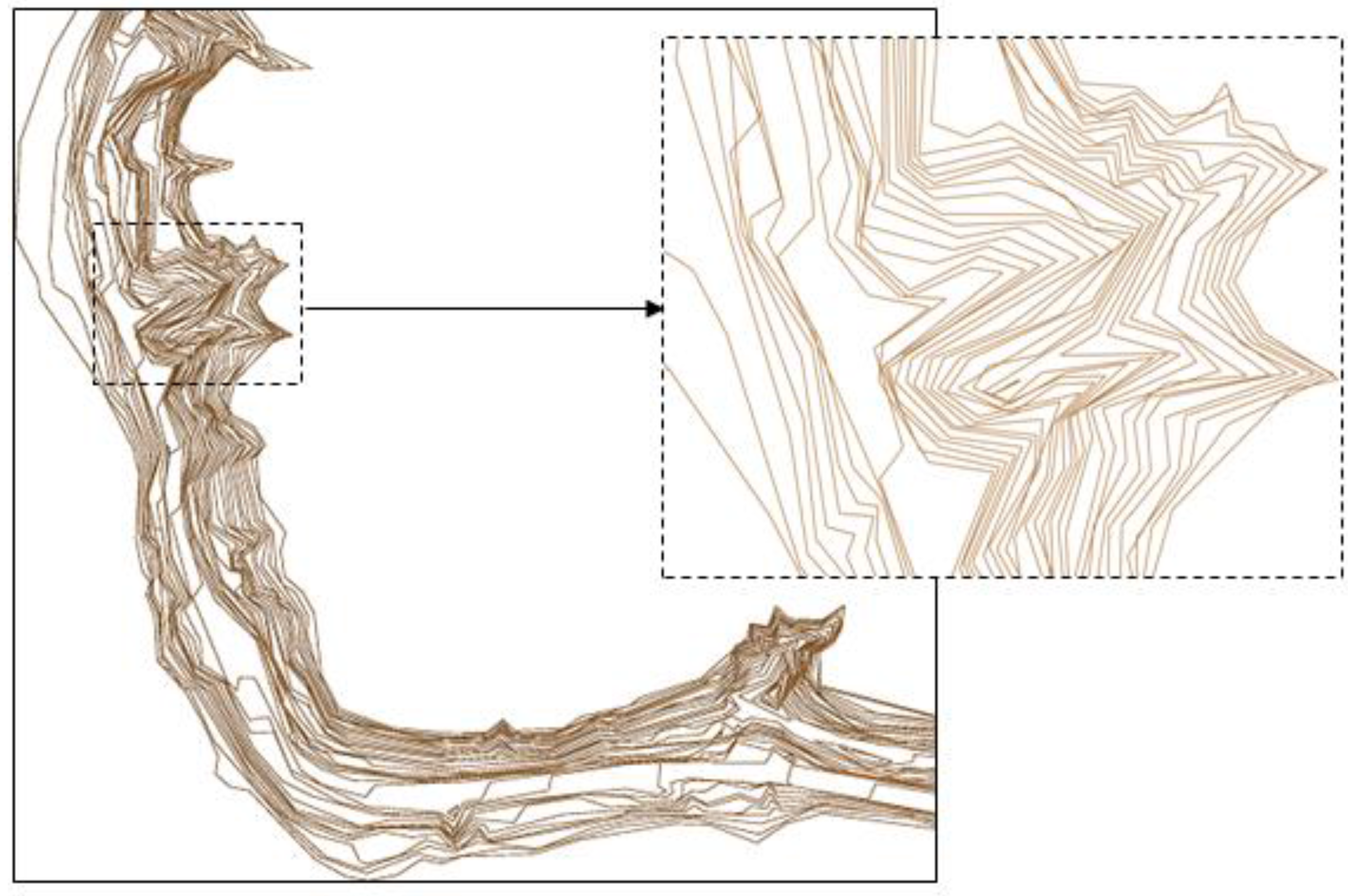
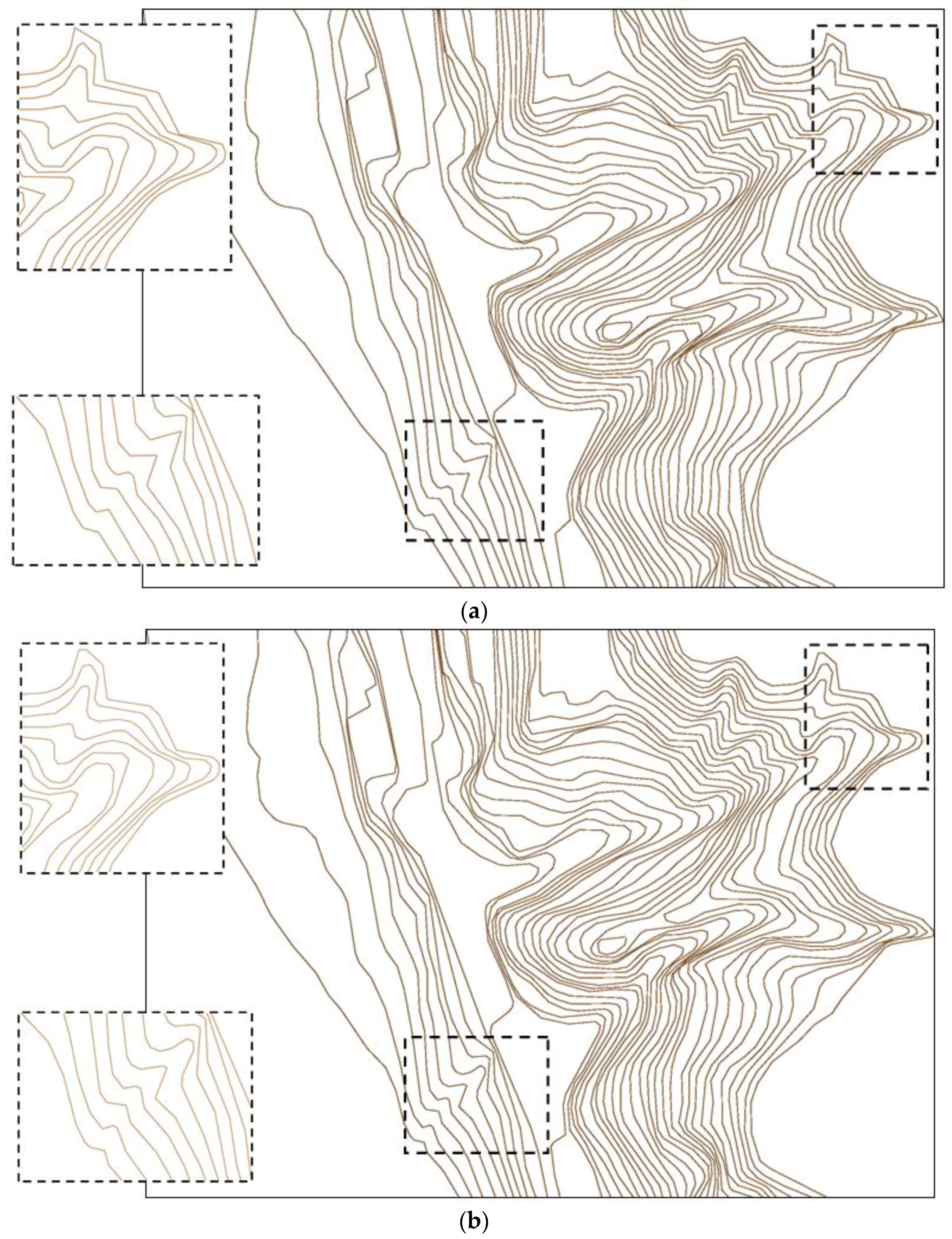
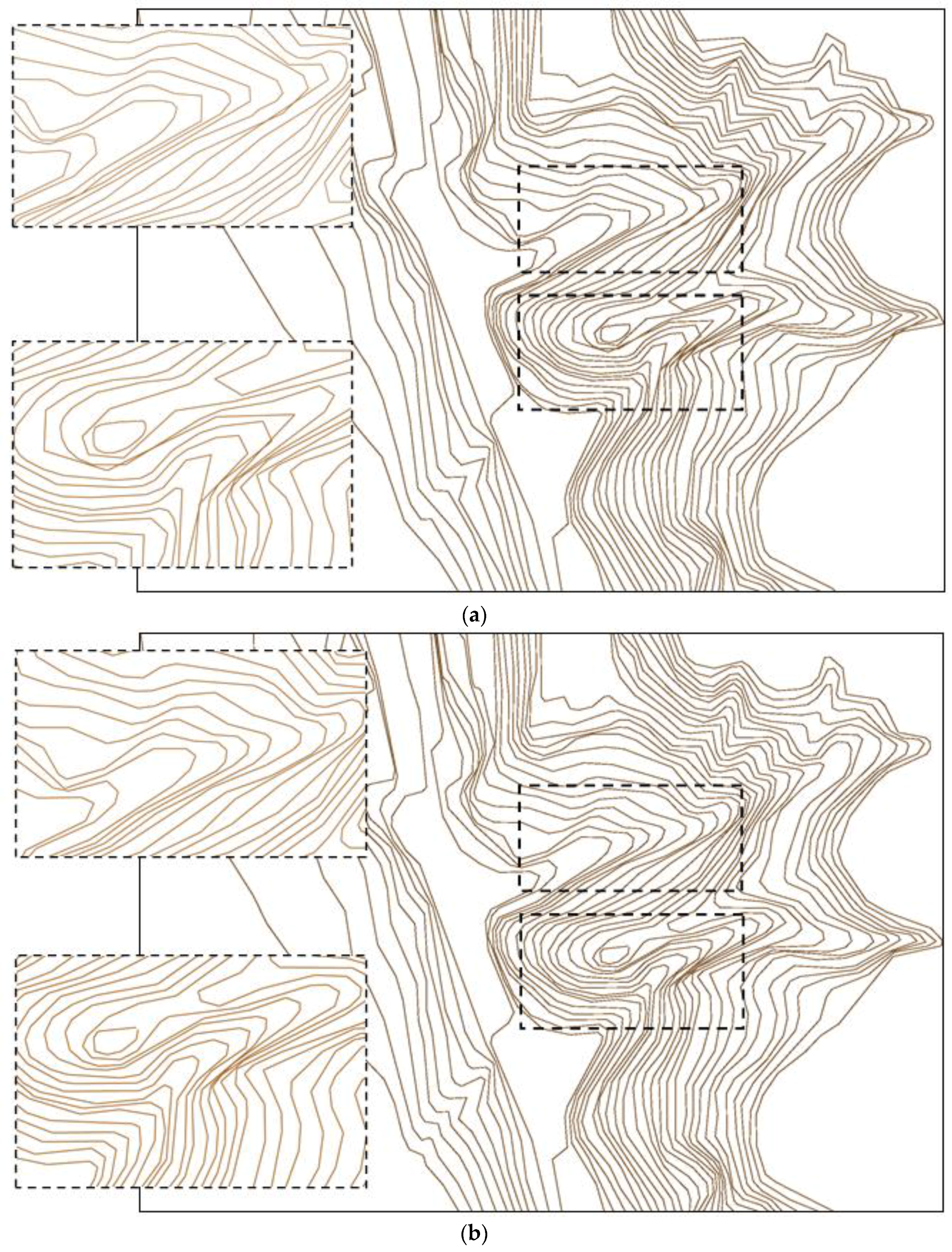
Supported by the iteratively operated ODC divisions and the customized simplification strategies for different curve groups, the proposed approach is able to handle geometric and topologic characteristics in a holistic environment and provide considerably improved line simplification performance in terms of (a) stability—the simplified lines change smoothly along with the increase of the parameter “D”. That is, the approach is not sensitive to the parameterizations; (b) robustness—the simplified results will not be significantly influenced when the process starts from different starting points and/or in opposite directions; (c) geometric accuracy—even though the cartographic lines have been simplified to a great extent (e.g., in case that the compression rate reaches 75.8%), the proposed approach can adequately maintain the general characteristics in terms of the position, orientation and shape (U- or V-shape) of the cartographic lines regardless how the parameters are set. This “accurate” nature allows the simplified contour lines to be merely slightly transformed based on the initial ones, which helps to reduce the probability of topologic issues of “intersection”. Moreover, the computing speed is acceptable. For instance, it only takes 0.2 s to accomplish the simplification process of reducing the number of the shape points from 72,723 to 17,591, which means 275,660 reduced points per second, on a common personal computer. Rather than a significant prototype, the proposed approach has already been utilized for the real-world data productions of contour lines simplification on more than 6400 topographic maps with a total area of 640,000 square kilometers (=10 km × 10 km × 6400) in the basin of Yangtze River of China. The automatic simplification results are indeed satisfactory.
Besides the contour lines, the same simplification method is now being experimented on various types of hydrographic lines, coast lines, administrative boundaries, etc. Clearly, it is not enough to merely implement the line simplification for the data generalization in many cases. In the future, the proposed line-simplification approach will be further researched so that it can work together with other operators of data generalization.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



























