The Scope of Earth-Observation to Improve the Consistency of the SDG Slum Indicator

 ,
, 
 and
and 
Abstract
:
1. Introduction
- Which state-of-the-art, EO-based method is appropriate to generate spatial information on deprived areas at the city scale and can be scaled-up for a global data repository?
- What are suitable approaches to address uncertainties of mapping results?
- How can mapping products be publicly provided taking geo-ethics into account?
- What is required to derive population estimates of inhabitants living in deprived living conditions from EO-based maps?
2. Overview of Methods to Provide Information for the SDG Indicator 11.1.1: From Survey to Remote Sensing-Based Methods
2.1. Overview of the Method by UN-Habitat
2.2. Data Coverage and Aggregation Level of the Presently Available Information on the SDG Indicator 11.1.1
2.3. Major Remote Sensings Steps to Provide Localized Information on the SDG Indicator 11.1.1
3. The Ability of Remote Sensing to Provide Data on Deprived Living Conditions at the City Level
3.1. Suitable Remote Sensing Sensor Systems to Provide Localized Information on Deprived Areas
3.2. At What Aggregation Level Should We Map Deprived Areas in Support of Global and Local SDG Initiatives?
3.3. Recent Advances in Remote Sensing Based Mapping of Deprived Areas
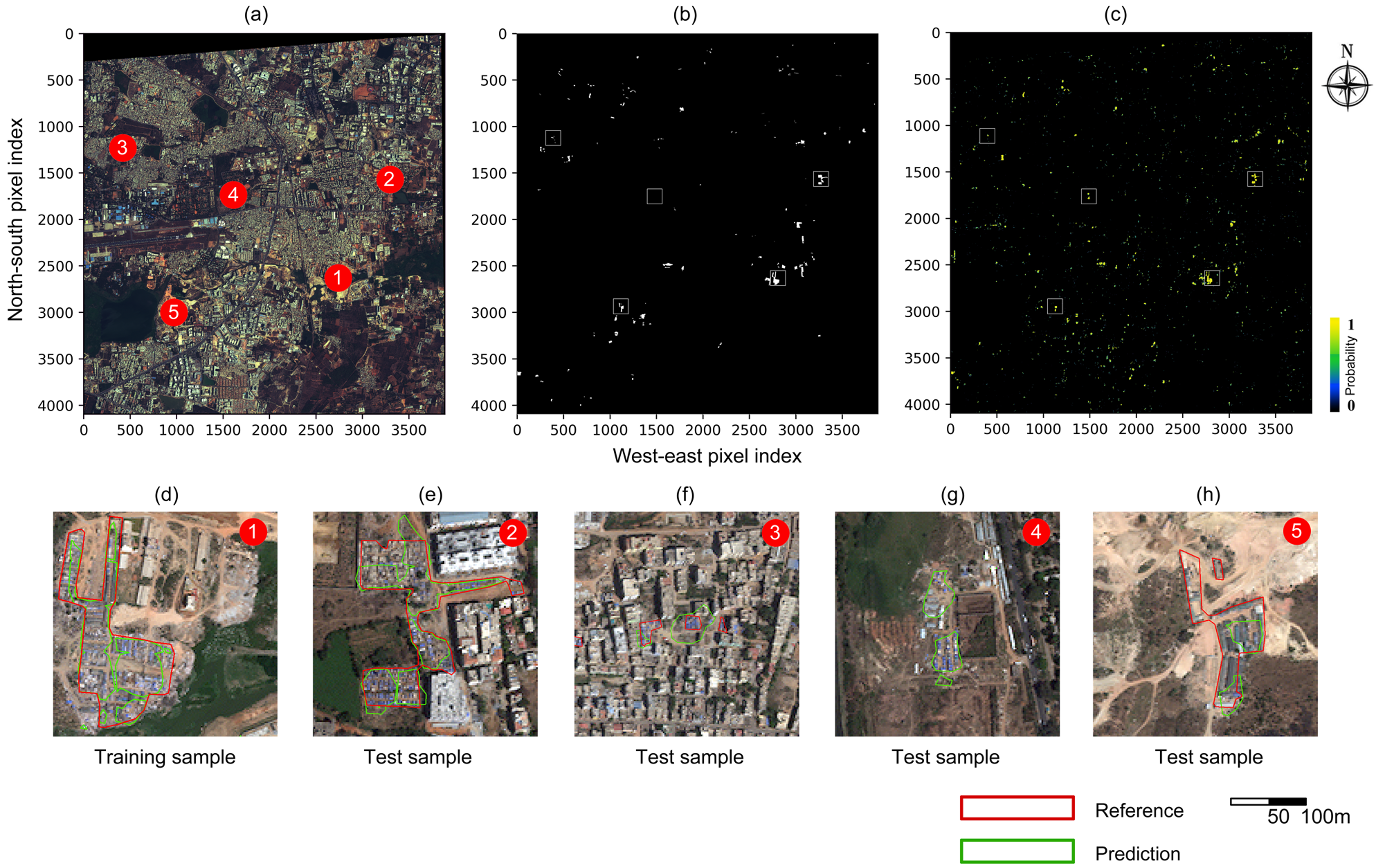
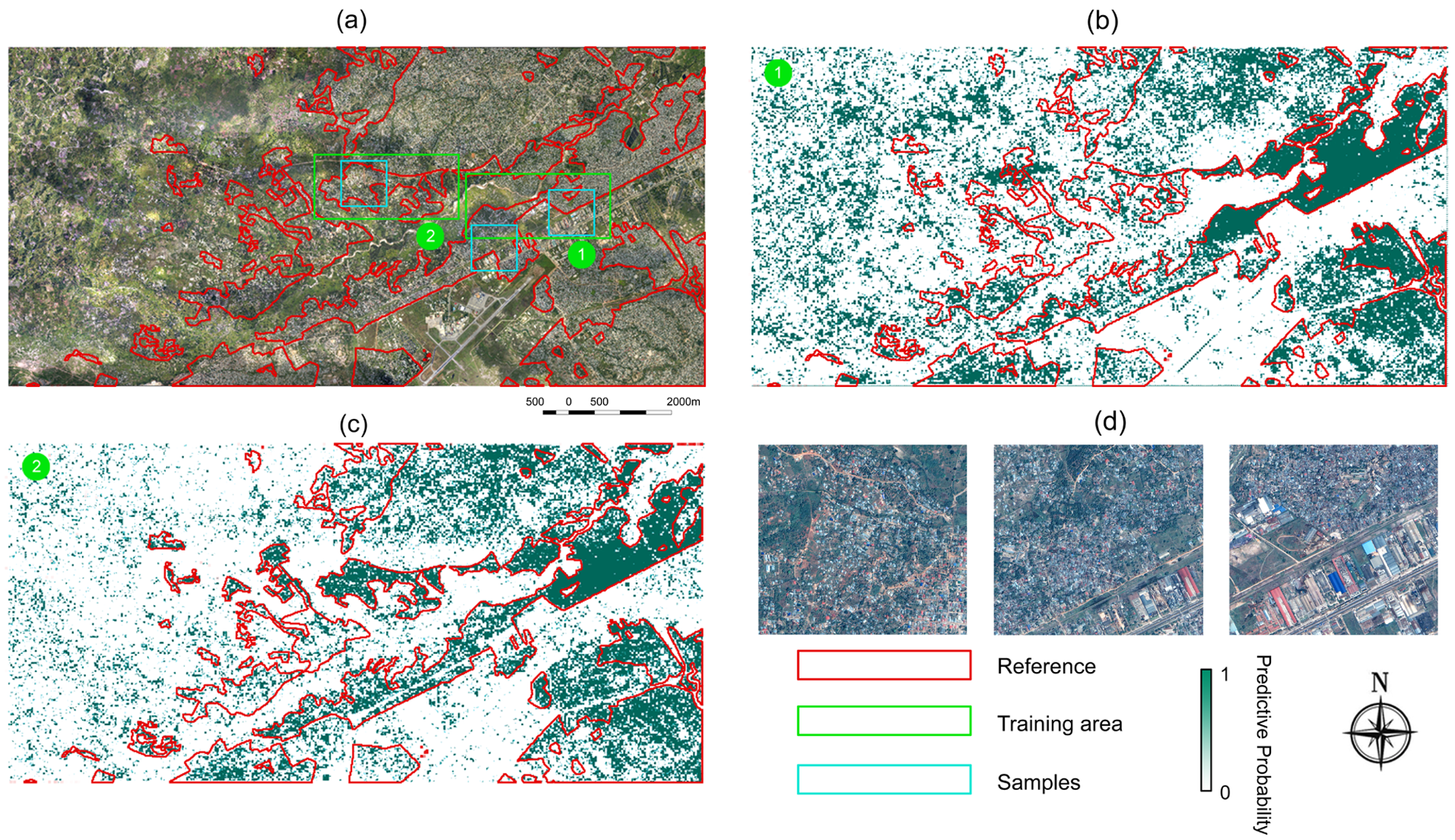
3.4. The Challenge to Map Small Deprived Pockets and High Spatial Dynamics: The Case of Bangalore
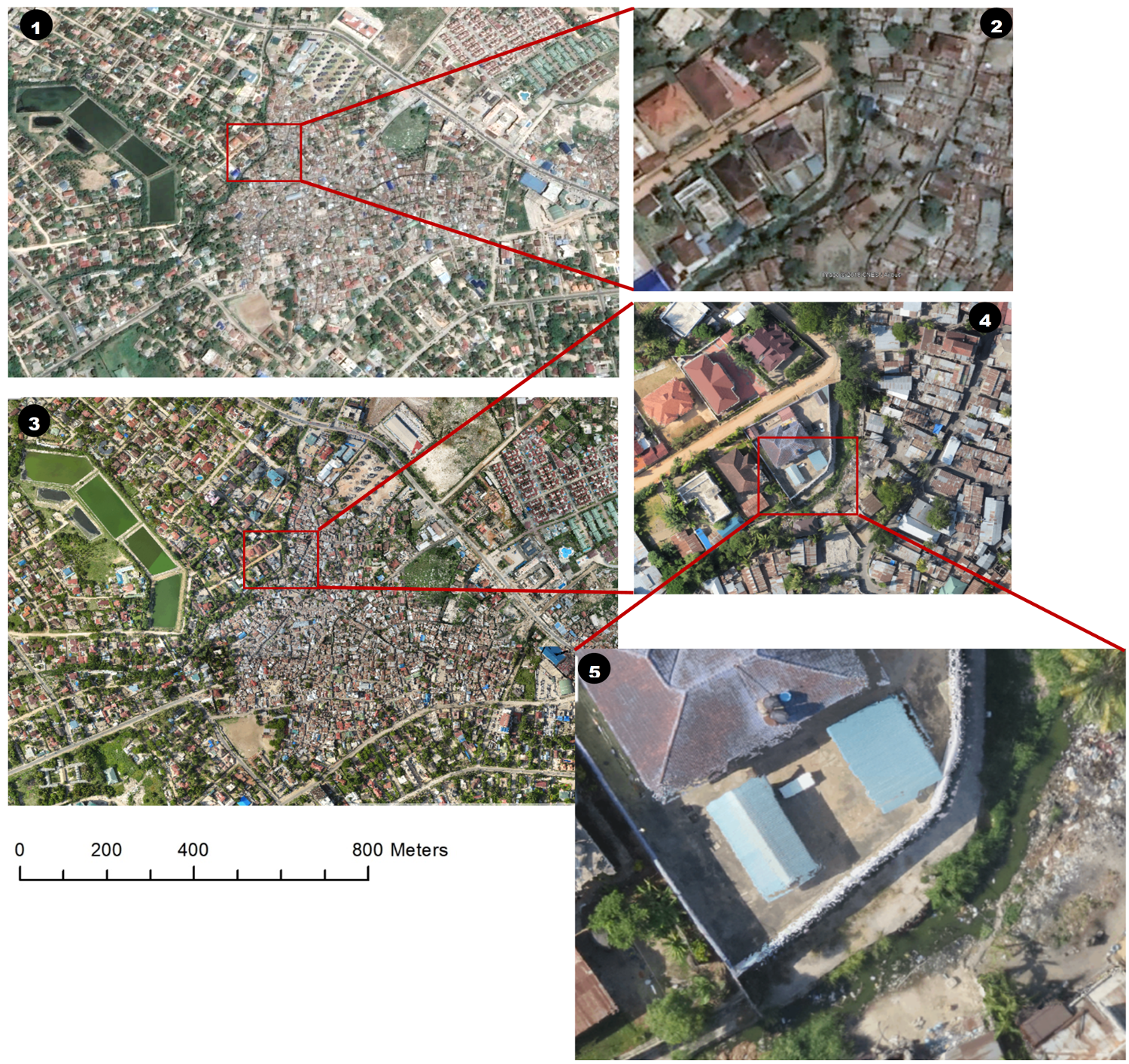
3.5. A City Built on Informality: The Case of Dar es Salaam
4. Uncertainties and the Accuracy Assessment of Mapping Deprived Areas
4.1. Uncertainties in Mapping Deprived Areas from Space and Ground
4.2. Uncertainties Caused by High Temporal Dynamics of Deprived Areas: The Case of Bangalore
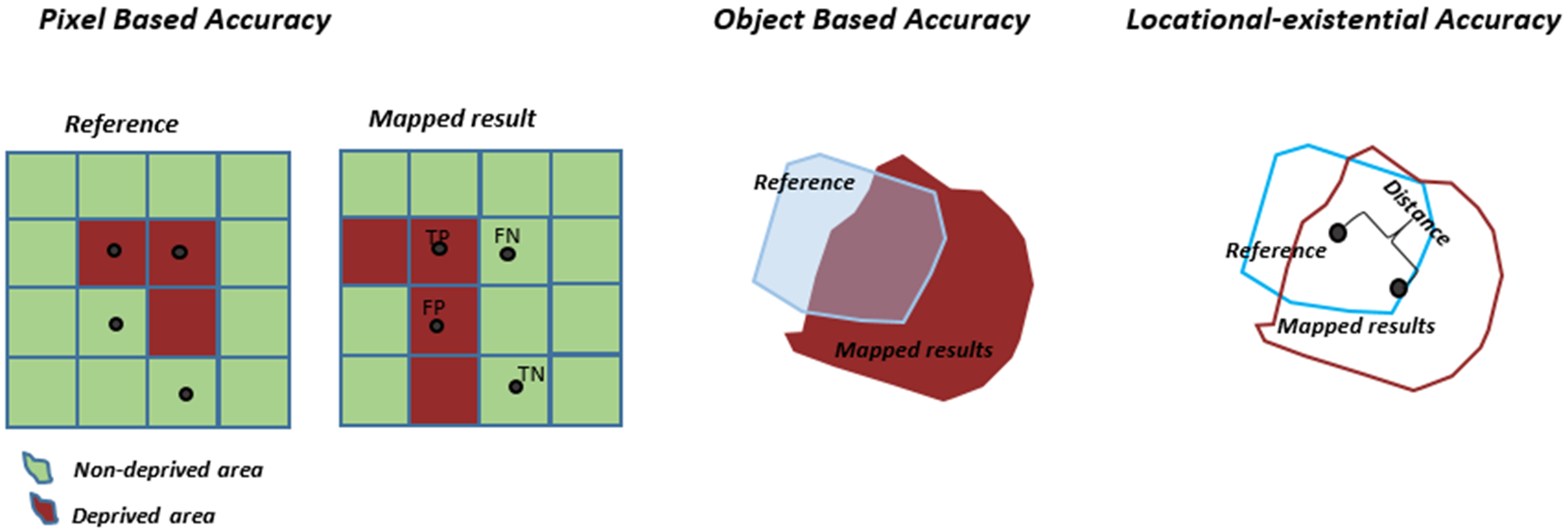
4.3. Assessing the Accuracy of Deprived-Area Maps
- (Classical) pixel-based assessment methods, e.g., in the form of a confusion (error) matrix;
- Object-based (extensional) methods, which assess the match of the extent of a mapped object with a reference object, e.g., in the form of the area of overlap;
- Locational–existential methods, which assess the existence and/or the locational match of the mapped object with a reference object, e.g., count of objects within a threshold distance that agree with the reference data.
4.4. The Uncertainty of Boundaries of Deprived Areas: The Cases of Jakarta and Bandung
5. Remote Sensing-Based Products for the Generation of Information on the SDG Indicator 11.1.1
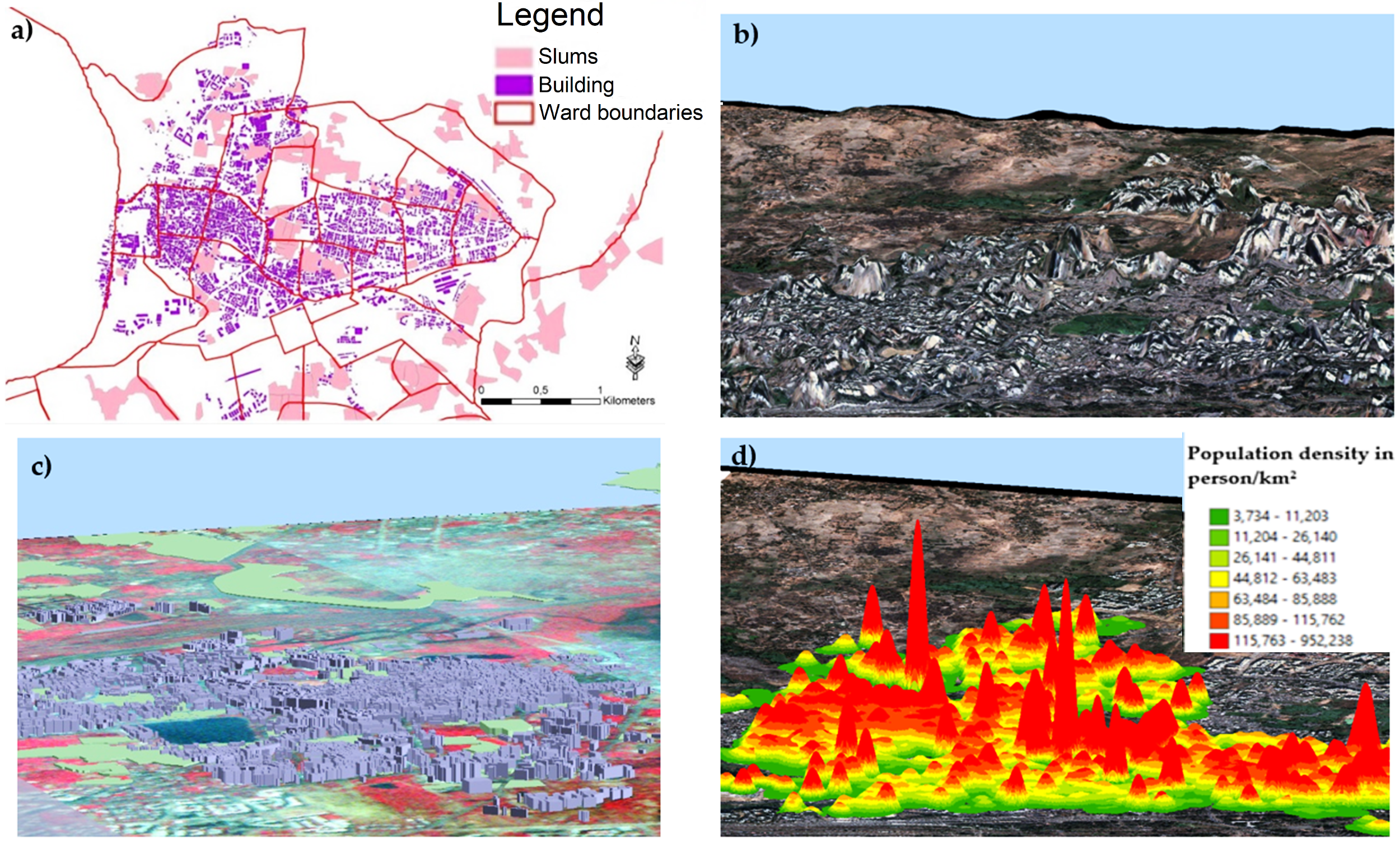
5.1. Estimating Inhabitants of Deprived Areas—Combining Maps and Available Statistical Data
5.2. How Can We Provide Remote Sensing Based Data on Deprived Areas to the General Public?
5.3. Population Estimates and Making Maps of Deprived Areas Publically Available: The Case of Nairobi
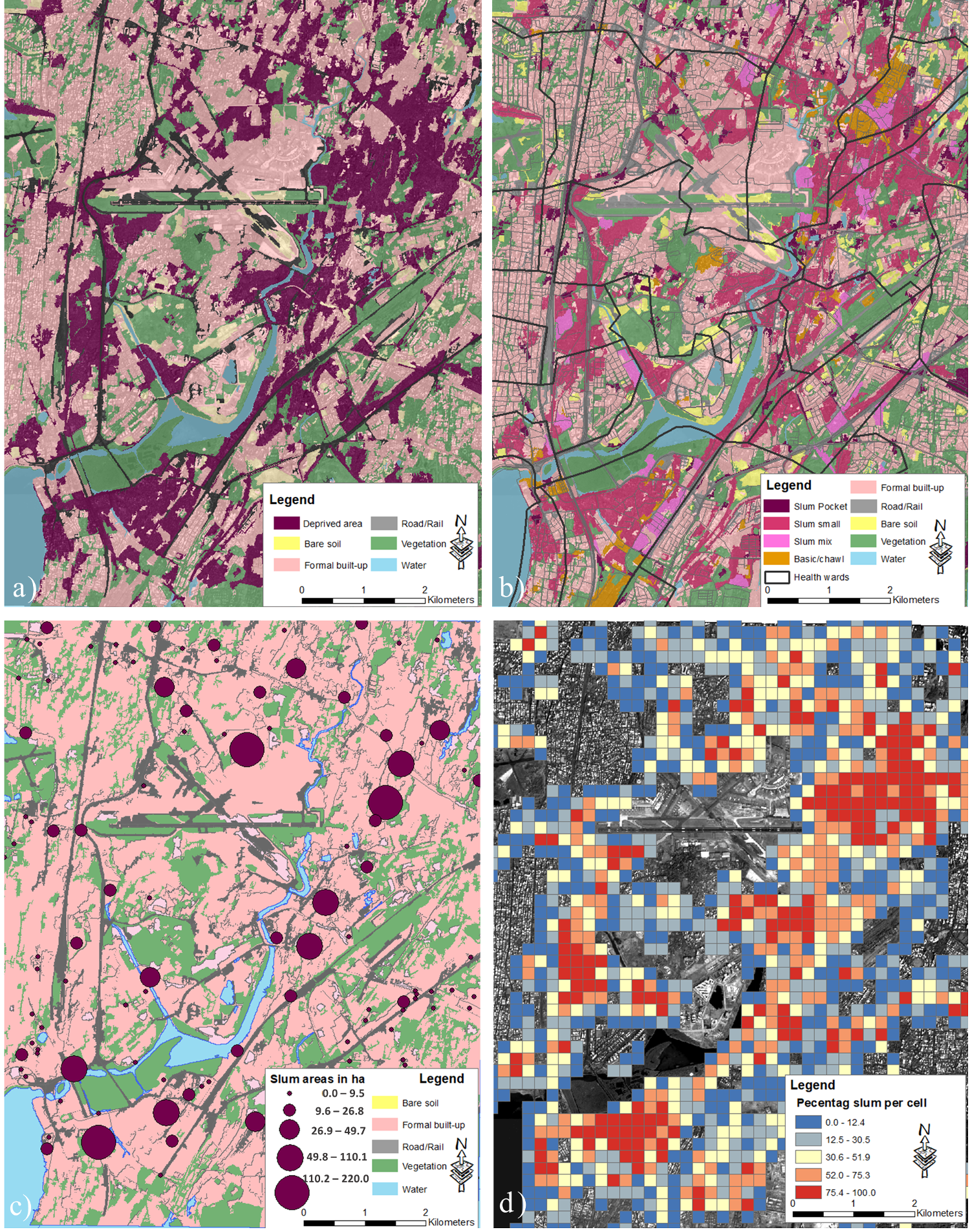
5.4. Leaving the Binary Vision Deprived Versus Non-Deprived Areas: The Case of Mumbai
6. Discussion
6.1. The Varying Degrees of Fuzziness When Mapping Deprived Areas
6.2. Can We Map the Complexity of Deprived Areas with Earth Observation-Based Methods?
6.3. The Use of EO-Based Information on Deprivation
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- UN-Habitat. Slums Almanac 2015–16. Tracking Improvement in the Lives of Slum Dwellers; UN-Habitat: Nairobi, Kenya, 2016. [Google Scholar]
- World Bank. Population Living in Slums (% of Urban Population). Available online: https://data.worldbank.org/indicator/EN.POP.SLUM.UR.ZS (accessed on 22 October 2018).
- UN-Habitat. Metadata: Indicator 11.1.1: Proportion of Urban Population Living in Slums, Informal Settlements or Inadequate Housing; UN-Habitat: Nairobi, Kenya, 2016. [Google Scholar]
- Veljanovski, T.; Kanjir, U.; Pehani, P.; Oštir, K.; Kovačič, P. Object-based image analysis of VHR satellite imagery for population estimation in informal settlement Kibera-Nairobi, Kenya. In Remote Sensing—Applications; Escalante, B., Ed.; InTech: Rijeka, Croatia, 2012; pp. 407–434. [Google Scholar]
- Karnataka Slum Development Board. Slum Details. Available online: http://ksdb.kar.nic.in/slums.asp (accessed on 1 October 2018).
- Roy, D.; Lees, M.H.; Pfeffer, K.; Sloot, P.M.A. Spatial segregation, inequality, and opportunity bias in the slums of Bengaluru. Cities 2018, 74, 269–276. [Google Scholar] [CrossRef]
- Taubenböck, H.; Wurm, M. Ich weiß, dass ich nichts weiß—Bevölkerungsschätzung in der Megacity Mumbai. In Globale Urbanisierung: Perspektive aus Dem All; Taubenböck, H., Wurm, M., Esch, T., Dech, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 171–178. [Google Scholar]
- Nolan, L.B. Slum definitions in urban India: Implications for the measurement of health inequalities. Popul. Dev. Rev. 2015, 41, 59–84. [Google Scholar] [CrossRef] [PubMed]
- Kuffer, M.; Pfeffer, K.; Sliuzas, R. Slums from space—15 years of slum mapping using remote sensing. Remote Sens. 2016, 8, 455. [Google Scholar] [CrossRef]
- Taubenböck, H.; Kraff, N.J.; Wurm, M. The morphology of the Arrival City—A global categorization based on literature surveys and remotely sensed data. Appl. Geogr. 2018, 92, 150–167. [Google Scholar] [CrossRef]
- Baud, I.; Kuffer, M.; Pfeffer, K.; Sliuzas, R.V.; Karuppannan, S. Understanding heterogeneity in metropolitan India: The added value of remote sensing data for analyzing sub-standard residential areas. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, 359–374. [Google Scholar] [CrossRef]
- Mboga, N.O.; Persello, C.; Bergado, J.; Stein, A. Detection of informal settlements from VHR images using Convolutional Neural Networks. Remote Sens. 2017, 9, 1106. [Google Scholar] [CrossRef]
- Duque, J.C.; Patino, J.E.; Betancourt, A. Exploring the Potential of Machine Learning for Automatic Slum Identification from VHR Imagery. Remote Sens. 2017, 9, 895. [Google Scholar] [CrossRef]
- Wurm, M.; Taubenböck, H. Detecting social groups from space—Assessment of remote sensing-based mapped morphological slums using income data. Remote Sens. Lett. 2018, 9, 41–50. [Google Scholar] [CrossRef]
- Statistic Devision (UN). Tier Classification for Global SDG Indicators; Statistic Devision (UN): New York, NY, USA, 2017. [Google Scholar]
- Lebuhn, H.; Holm, A.; Junker, S.; Neitzel, K. Wohnverhältnisse in Deutschland—Eine Analyse der Sozialen Lage in 77 Großstädten. Bericht aus dem Forschungsprojekt Sozialer Wohnversorgungsbedarf; Hans-Böckler-Stiftung: Berlin/Düsseldorf, Germany, 2017. [Google Scholar]
- Government of India. Population Census 2011. Available online: http://www.census2011.co.in/ (accessed on 7 June 2016).
- Urban Management Centre. City Health Plan Ahmedabad. National Urban Health Mission (NUHM); Health Department, Ahmedabad Municipal Corporation: Ahmedabad, India, 2013. [Google Scholar]
- Government of India. Slums in India a Statistical Compendium; Ministry of Housing and Urban Poverty Alleviation, National Buildings Organization: New Delhi, India, 2011.
- MPWH. The National Urban Slum Upgrading Program. Environmental and Social Management Framework; Ministry of Public Works and Housing Directorate General of Human Settlement (MPWH): Amman, Jordan, 2016.
- BBS (Bangladesh Bureau of Statistics). Bangladesh Population and Housing Census 2011; Statistics and Informatics Division (SID), Ministry of Planning: Dhaka, Bangladesh, 2012.
- Kenya National Bureau of Statistics. 2009 Kenya Population and Housing Census. Analytical Report on Urbanization; Ministry of State for Planning: Nairobi, Kenya, 2012; Volume VIII.
- National Bureau of Statistics. Basic Facts and Figures on Human Settlements, 2012. Tanzania Mainland; Ministry of Finance: Dar es Salaam, Tanzania, 2013.
- Ministry of Infrastructure. National Informal Settlement Upgrading Strategy; Republic of Rwanda: Kigali, Rwanda, 2015.
- Nadalin, V.G.; Krause, C.; Neto, V.C.L. Distribuição de Aglomerados Subnormais na Rede Urbana e nas Grandes Regiões Brasileiras; Instituto de Pesquisa Econômica Aplicada (IPEA): Rio de Janeiro, Brazil, 2012. [Google Scholar]
- Vuksanovic-Macura, Z. The mapping and enumeration of informal Roma settlements in Serbia. Environ. Urban. 2012, 24, 685–705. [Google Scholar] [CrossRef] [Green Version]
- Kuffer, M.; Orina, F.; Sliuzas, R.; Taubenböck, H. Spatial patterns of slums: Comparing African and Asian cities. In Proceedings of the Joint Urban Remote Sensing Event (JURSE), Dubai, UAE, 6–8 March 2017. [Google Scholar]
- Leonita, G.; Kuffer, M.; Sliuzas, R.; Persello, C. Machine Learning-Based Slum Mapping in Support of Slum Upgrading Programs: The Case of Bandung City, Indonesia. Remote Sens. 2018, 10, 1522. [Google Scholar] [CrossRef]
- Owen, K.K. Evaluating slum severity from remote sensing imagery. In Understanding Megacities with the Reconnaissance, Surveillance, and Intelligence Paradigm; Topical Strategic Multi-Layer Assessment (SMA) and U.S. Army Engineer Research Development Center (ERDC) White Papers in Support of National Security Challenges; Ehlschlaeger, C., Ed.; Strategic Multi-Layer Assessment (SMA) and U.S. Army Engineer Research Development Center (ERDC): Vicksburg, MS, USA, 2014; pp. 67–75. [Google Scholar]
- Hofmann, P.; Strobl, J.; Blaschke, T.; Kux, H. Detecting informal settlements from QuickBird data in Rio de Janeiro using an object based approach. In Object-Based Image Analysis; Blaschke, T., Lang, S., Hay, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 531–553. [Google Scholar]
- Wang, J.; Kuffer, M.; Pfeffer, K. The role of spatial heterogeneity in detecting urban slums. Comput. Environ. Urban Syst. 2018. [Google Scholar] [CrossRef]
- Wurm, M.; Weigand, M.; Schmitt, A.; Geiß, C.; Taubenböck, H. Exploitation of textural and morphological image features in Sentinel-2A data for slum mapping. In Proceedings of the Joint Urban Remote Sensing Event (JURSE), Dubai, UAE, 6–8 March 2017; pp. 1–4. [Google Scholar]
- Kemper, T.; Mudau, N.; Mangara, P.; Pesaresi, M. Towards an automated monitoring of human settlements in South Africa using high resolution SPOT satellite imagery. In Proceedings of the 36th International Symposium on Remote Sensing of Environment, Berlin, Germany, 11–15 May 2015; Volume XL-7/W3; pp. 1389–1394. [Google Scholar]
- Wurm, M.; Taubenböck, H.; Weigand, M.; Schmitt, A. Slum mapping in polarimetric SAR data using spatial features. Remote Sens. Environ. 2017, 194, 190–204. [Google Scholar] [CrossRef]
- Schmitt, A.; Sieg, T.; Wurm, M.; Taubenböck, H. Investigation on the separability of slums by multi-aspect TerraSAR-X dual-co-polarized high resolution spotlight images based on the multi-scale evaluation of local distributions. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 181–198. [Google Scholar] [CrossRef]
- Kleynhans, W.; Salmon, B.P.; Olivier, J.C. Detecting settlement expansion in South Africa using a hyper-temporal SAR change detection approach. Int. J. Appl. Earth Obs. Geoinf. 2015, 42, 142–149. [Google Scholar] [CrossRef]
- Kit, O.; Lüdeke, M.; Reckien, D. Defining the bull’s eye: Satellite imagery-assisted slum population assessment in Hyderabad, India. Urban Geogr. 2013, 34, 413–424. [Google Scholar] [CrossRef]
- Gevaert, C.M.; Persello, C.; Sliuzas, R.; Vosselman, G. Informal settlement classification using point-cloud and image-based features from UAV data. ISPRS J. Photogramm. Remote Sens. 2017, 125, 225–236. [Google Scholar] [CrossRef]
- Gevaert, C.M.; Sliuzas, R.; Persello, C.; Vosselman, G. Opportunities for UAV mapping to support unplanned settlement upgrading. In Proceedings of the GeoTech Rwanda 2015, Kigali, Rwanda, 18–20 November 2015; p. 5. [Google Scholar]
- Huang, Y.; Zhuo, L.; Tao, H.; Shi, Q.; Liu, K. A Novel Building Type Classification Scheme Based on Integrated LiDAR and High-Resolution Images. Remote Sens. 2017, 9, 679. [Google Scholar] [CrossRef]
- Sliuzas, R.; Kuffer, M.; Pfeffer, K.; Gevaert, C.M.; Persello, C. Slum mapping: From space to unmanned aerial vehicle based approaches. In Proceedings of the Joint Urban Remote Sensing Event (JURSE), Dubai, UAE, 6–8 March 2017; p. 4. [Google Scholar]
- Kuffer, M.; Barros, J.; Sliuzas, R.V. The development of a morphological unplanned settlement index using very-high-resolution (VHR) imagery. Comput. Environ. Urban Syst. 2014, 48, 138–152. [Google Scholar] [CrossRef] [Green Version]
- Bechtel, B.; Alexander, P.; Böhner, J.; Ching, J.; Conrad, O.; Feddema, J.; Mills, G.; See, L.; Stewart, I. Mapping local climate zones for a worldwide database of the form and function of cities. ISPRS Int. J. Geo-Inf. 2015, 4, 199–219. [Google Scholar] [CrossRef] [Green Version]
- Stewart, I.D.; Oke, T.R. Local Climate Zones for Urban Temperature Studies. Bull. Am. Meteorol. Soc. 2012, 93, 1879–1900. [Google Scholar] [CrossRef]
- Arribas-Bel, D.; Patino, J.E.; Duque, J.C. Remote sensing-based measurement of Living Environment Deprivation: Improving classical approaches with machine learning. PLoS ONE 2017, 12, e0176684. [Google Scholar] [CrossRef] [PubMed]
- Pratomo, J.; Kuffer, M.; Martinez, J.; Kohli, D. Coupling uncertainties with accuracy assessment in object-based slum detections, case study: Jakarta, Indonesia. Remote Sens. 2017, 9, 1164. [Google Scholar] [CrossRef]
- Kohli, D.; Sliuzas, R.V.; Kerle, N.; Stein, A. An ontology of slums for image-based classification. Comput. Environ. Urban Syst. 2012, 36, 154–163. [Google Scholar] [CrossRef]
- Hofmann, P. Defining robustness measures for OBIA framework: A case study for detecting informal settlements. In Global Urban Monitoring and Assessment through Earth Observation; Weng, Q., Ed.; CRC Press: Boca Raton, FL, USA, 2014; pp. 303–324. [Google Scholar]
- Kuffer, M.; Pfeffer, K.; Sliuzas, R.; Baud, I. Extraction of slum areas from VHR imagery using GLCM variance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1830–1840. [Google Scholar] [CrossRef]
- Kit, O.; Lüdeke, M.; Reckien, D. Texture-based identification of urban slums in Hyderabad, India using remote sensing data. App. Geogr. 2012, 32, 660–667. [Google Scholar] [CrossRef]
- Barros, F.; Sobreira, F. Assessing Texture Pattern in Slum Across Scales: An Unsupervised Approach; CASA Working Papers 87; Centre for Advanced Spatial Analysis (UCL): London, UK, 2005. [Google Scholar]
- Ella, L.P.A.; van den Bergh, F.; van Wyk, B.J.; van Wyk, M.A. A Comparison of Texture Feature Algorithms for Urban Settlement Classification. In Proceedings of the 2008 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2008), Boston, MA, USA, 7–11 July 2008; pp. 1308–1311. [Google Scholar]
- Graesser, J.; Cheriyadat, A.; Vatsavai, R.R.; Chandola, V.; Long, J.; Bright, E. Image based characterization of formal and informal neighborhoods in an urban landscape. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1164–1176. [Google Scholar] [CrossRef]
- Kit, O.; Lüdeke, M. Automated detection of slum area change in Hyderabad, India using multitemporal satellite imagery. ISPRS J. Photogramm. Remote Sens. 2013, 83, 130–137. [Google Scholar] [CrossRef] [Green Version]
- Sandborn, A.; Engstrom, R.N. Determining the relationship between census data and spatial features derived from high-resolution imagery in Accra, Ghana. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1970–1977. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L. An SVM ensemble approach combining spectral, structural, and semantic features for the classification of high-resolution remotely sensed imagery. IEEE Trans. Geosci. Remote Sens. 2013, 51, 257–272. [Google Scholar] [CrossRef]
- Liu, H.; Huang, X.; Wen, D.; Li, J. The use of landscape metrics and transfer learning to explore urban villages in China. Remote Sens. 2017, 9, 365. [Google Scholar] [CrossRef]
- Persello, C.; Bruzzone, L. Kernel-Based Domain-Invariant Feature Selection in Hyperspectral Images for Transfer Learning. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2615–2626. [Google Scholar] [CrossRef]
- Persello, C.; Stein, A. Deep Fully Convolutional Networks for the Detection of Informal Settlements in VHR Images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2325–2329. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- LeCun, Y.; Kavukcuoglu, K.; Farabet, C. Convolutional Networks and Applications in Vision. In Proceedings of the 2010 IEEE International Symposium on Circuits and Systems, Paris, France, 30 May–2 June 2010; pp. 253–256. [Google Scholar]
- Roy, D.; Palavalli, B.; Menon, N.; King, R.; Pfeffer, K.; Lees, M.; Sloot, P.M. Survey-based socio-economic data from slums in Bangalore, India. Sci. Data 2018, 5, 170200. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- International Growth Centre (IGC). Urbanisation in Tanzania. Population Growth, Internal Migration and Urbanisation in Tanzania 1967–2012: A Census-Based Regional Analysis; London School of Economic and Political Science: London, UK, 2014. [Google Scholar]
- UN-Habitat. Informal Settlements and Finance in Dar es Salaam, Tanzania; UN-Habitat: Nairobi, Kenya, 2010. [Google Scholar]
- Kohli, D.; Stein, A.; Sliuzas, R. Uncertainty analysis for image interpretations of urban slums. Comput. Environ. Urban Syst. 2016, 60, 37–49. [Google Scholar] [CrossRef]
- Powers, D.M. Evaluation: From Precision, Recall and F-Measure to ROC, Informedness, Markedness and Correlation. J. Mach. Learn. Technol. 2011, 2, 37–63. [Google Scholar]
- Cai, L.; Shi, W.; Miao, Z.; Hao, M. Accuracy Assessment Measures for Object Extraction from Remote Sensing Images. Remote Sens. 2018, 10, 303. [Google Scholar] [CrossRef]
- Persello, C.; Bruzzone, L. A Novel Protocol for Accuracy Assessment in Classification of Very High Resolution Images. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1232–1244. [Google Scholar] [CrossRef]
- Fisher, P. Sorites paradox and vague geographies. Fuzzy Sets Syst. 2000, 113, 7–18. [Google Scholar] [CrossRef] [Green Version]
- Ministry of Public Works and Housing (Kemen PUPR). City without Slums (KOTAKU) Program Guide; Ministry of Public Works and Housing: Jakarta, Indonesia, 2016.
- Leonita, G. Evaluating the Performance of Machine Learning for Slum Mapping Using Very High-Resolution Imagery. The Case of Bandung City, Indonesia. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2018. [Google Scholar]
- Pratomo, J.; Kuffer, M.; Kohli, D.; Martinez, J. Application of the trajectory error matrix for assessing the temporal transferability of OBIA for slum detection. Eur. J. Remote Sens. 2018, 51, 838–849. [Google Scholar] [CrossRef]
- Kuffer, M.; Sliuzas, R. Modelling day and night time population using a 3D urban model. In Real Corp 2014; Schrenk, M., Popovich, V.V., Zeile, P., Elisei, P., Eds.; CORP—Competence Center of Urban and Regional Planning: Vienna, Austria, 2014; pp. 397–405. [Google Scholar]
- Makau, J.; Dobson, S.; Samia, E. The five-city enumeration: The role of participatory enumerations in developing community capacity and partnerships with government in Uganda. Environ. Urban. 2012, 24, 31–46. [Google Scholar] [CrossRef]
- Lefebvre, H. The Urban Revolution; University of Minnesota Press: Minneapolis, MN, USA; London, UK, 2003. [Google Scholar]
- Monmonier, M. How to Lie with Maps; University of Chicago Press: Chicago, IL, USA; London, UK, 1991. [Google Scholar]
- Curry, M. Digital Places: Living with Geographic Information Technologies; Routledge: London, UK; New York, NY, USA, 1998. [Google Scholar]
- Wood, D.; Fels, J.; Krygier, J. Rethinking the Power of Maps; Guilford Press: New York, NY, USA, 2010. [Google Scholar]
- Kitchin, R.; Gleeson, J.; Dodge, M. Unfolding mapping practices: A new epistemology for cartography. Trans. Inst. Br. Geogr. 2013, 38, 480–496. [Google Scholar] [CrossRef]
- Borgmann, A. Holding on to Reality: The Nature of Information at the Turn of the Millennium; University of Chicago Press: Chicago, IL, USA; London, UK, 1999. [Google Scholar]
- Capurro, R. Digital hermeneutics. AI Soc. 2010, 35, 35–42. [Google Scholar] [CrossRef]
- Verbeek, P.-P. What Things Do: Philosophical Reflections on Technology, Agency, and Design; Pennsylvania State University Press: University Park, PA, USA, 2005. [Google Scholar]
- Floridi, L.; Taddeo, M. What is data ethics? Philos. Trans. R. Ser. A 2016, 374, 20160360. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kitchin, R. The ethics of smart cities and urban science. Philos. Trans. R. Ser. A 2016, 374, 20160115. [Google Scholar] [CrossRef] [PubMed]
- Capurro, R. Intercultural information ethics: Foundations and applications. J. Inf. Commun. Ethics Soc. 2008, 6, 116–126. [Google Scholar] [CrossRef]
- Gevaert, C.M.; Sliuzas, R.; Persello, C.; Vosselman, G. Evaluating the Societal Impact of Using Drones to Support Urban Upgrading Projects. ISPRS Int. J. Geo-Inf. 2018, 7, 91. [Google Scholar] [CrossRef]
- Taylor, L. Safety in numbers? Group privacy and big data analytics in the developing world. In Group Privacy: New Challenges of Data Technologies; Taylor, L., Floridi, L., van der Sloot, B., Eds.; Springer: Dordrecht, The Netherlands, 2017; pp. 13–36. [Google Scholar]
- BBC News. Kenya Slum Demolished to Make Way for Road; BBC News: London, UK, 2018. [Google Scholar]
- United Nations. The world’s cities in 2016. In Data Booklet; Department of Economic and Social Affairs, Population Division: New York, NY, USA, 2016. [Google Scholar]
- Mittulah, W. The Case of Nairobi, Kenya; UN-Habitat: Nairobi, Kenya, 2003. [Google Scholar]
- Hutt, R. These Are the World’s Five Biggest Slums; World Economic Forum: Cologny, Switzerland, 2016. [Google Scholar]
- Desgroppes, A.; Taupin, S. Kibera: The biggest slum in Africa? Les Cahiers l’Afrique l’Est 2011, 44, 23–34. [Google Scholar]
- Patel, S.; Sliuzas, R.; Mathur, N. The risk of impoverishment in urban development-induced displacement and resettlement in Ahmedabad. Environ. Urban. 2015, 27, 231–256. [Google Scholar] [CrossRef] [Green Version]
- Githira, D.N. Growth and Eviction of Informal Settlements in Nairobi; University of Twente, Faculty of Geo-Information and Earth Observation (ITC): Enschede, The Netherlands, 2016. [Google Scholar]
- SDI. Strategic Plan 2018–2022; SDI: Cape Town, South Africa, 2018. [Google Scholar]
- Kuffer, M.; Pfeffer, K.; Sliuzas, R.; Baud, I.; van Maarseveen, M. Capturing the Diversity of Deprived Areas with Image-Based Features: The Case of Mumbai. Remote Sens. 2017, 9, 384. [Google Scholar] [CrossRef]
- Seidl, D.E.; Paulus, G.; Jankowski, P.; Regenfelder, M. Spatial obfuscation methods for privacy protection of household-level data. Appl. Geogr. 2015, 63, 253–263. [Google Scholar] [CrossRef]
- Subbaraman, R.; Nolan, L.; Shitole, T.; Sawant, K.; Shitole, S.; Sood, K.; Nanarkar, M.; Ghannam, J.; Betancourt, T.S.; Bloom, D.E.; et al. The psychological toll of slum living in Mumbai, India: A mixed methods study. Soc. Sci. Med. 2014, 119, 155–169. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Agarwal, S. The state of urban health in India; comparing the poorest quartile to the rest of the urban population in selected states and cities. Environ. Urban. 2011, 23, 13–28. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, S.; Taneja, S. All slums are not equal: Child health conditions among the urban poor. Indian Pediatr. 2005, 42, 233–244. [Google Scholar] [PubMed]
- Nagle, N.N.; Buttenfield, B.P.; Leyk, S.; Speilman, S. Dasymetric Modeling and Uncertainty. Ann. Assoc. Am. Geogr. 2014, 104, 80–95. [Google Scholar] [CrossRef] [PubMed]
- Langford, M.; Higgs, G.; Radcliffe, J.; White, S. Urban population distribution models and service accessibility estimation. Comput. Environ. Urban Syst. 2008, 32, 66–80. [Google Scholar] [CrossRef]
- Mossoux, S.; Kervyn, M.; Soulé, H.; Canters, F. Mapping population distribution from high resolution remotely sensed imagery in a data poor setting. Remote Sens. 2018, 10, 1409. [Google Scholar] [CrossRef]
- Beukes, A. Making the Invisible Visible: Generating Data on ‘Slums’ at Local, City and Global Scales; International Institute for Environment and Development: London, UK, 2015. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicator | Slums | Informal Settlements | Inadequate Housing | Mapping via Earth Observation (EO) (P: Indirectly Observable via Image Proxies, Combined with Survey Data) |
|---|---|---|---|---|
| Access to water | X | X | X | P |
| Access to sanitation | X | X | X | P |
| Sufficient living area, overcrowding | X | X | Density | |
| Structural quality, durability of location | X | X | X | Roofing material, locational and settlement characteristics (e.g., hazards, patterns) |
| Security of tenure | X | X | X | P |
| Affordability | X | P | ||
| Accessibility | X | EO as input to spatial analysis (accessibility modelling) | ||
| Cultural adequacy | X | P |
| India 1 | Indonesia 2 | Bangladesh 3 | Kenya 4 | Tanzania 5 | Rwanda 6 | Brazil 7 | |
| Built-up density | ✓ | ✓ | ✓ | ✓ | |||
| Irregular layout | ✓ | ✓ | |||||
| Road infrastructure | ✓ | ✓ | ✓ | ✓ | |||
| Water supply | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ * | |
| Sanitation | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ * | |
| Solid waste management | ✓ | ✓ | ✓ | ✓ * | |||
| Housing quality | ✓ | ✓ | ✓ | ||||
| Overcrowding | ✓ | ✓ | |||||
| Electricity | ✓ | ||||||
| Tenure | ✓ | ✓ | |||||
| Environ/site conditions | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Socio-economics of HH | ✓ | ✓ | |||||
| Min. size | ✓ | ✓ |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuffer, M.; Wang, J.; Nagenborg, M.; Pfeffer, K.; Kohli, D.; Sliuzas, R.; Persello, C. The Scope of Earth-Observation to Improve the Consistency of the SDG Slum Indicator. ISPRS Int. J. Geo-Inf. 2018, 7, 428. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7110428
Kuffer M, Wang J, Nagenborg M, Pfeffer K, Kohli D, Sliuzas R, Persello C. The Scope of Earth-Observation to Improve the Consistency of the SDG Slum Indicator. ISPRS International Journal of Geo-Information. 2018; 7(11):428. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7110428
Chicago/Turabian StyleKuffer, Monika, Jiong Wang, Michael Nagenborg, Karin Pfeffer, Divyani Kohli, Richard Sliuzas, and Claudio Persello. 2018. "The Scope of Earth-Observation to Improve the Consistency of the SDG Slum Indicator" ISPRS International Journal of Geo-Information 7, no. 11: 428. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7110428