
Multi-Channel High-Dimensional Data Analysis with PARAFAC-GA-BP for Nonstationary Mechanical Fault Diagnosis

Abstract
:1. Introduction
2. Principle of Parallel Factor Analysis
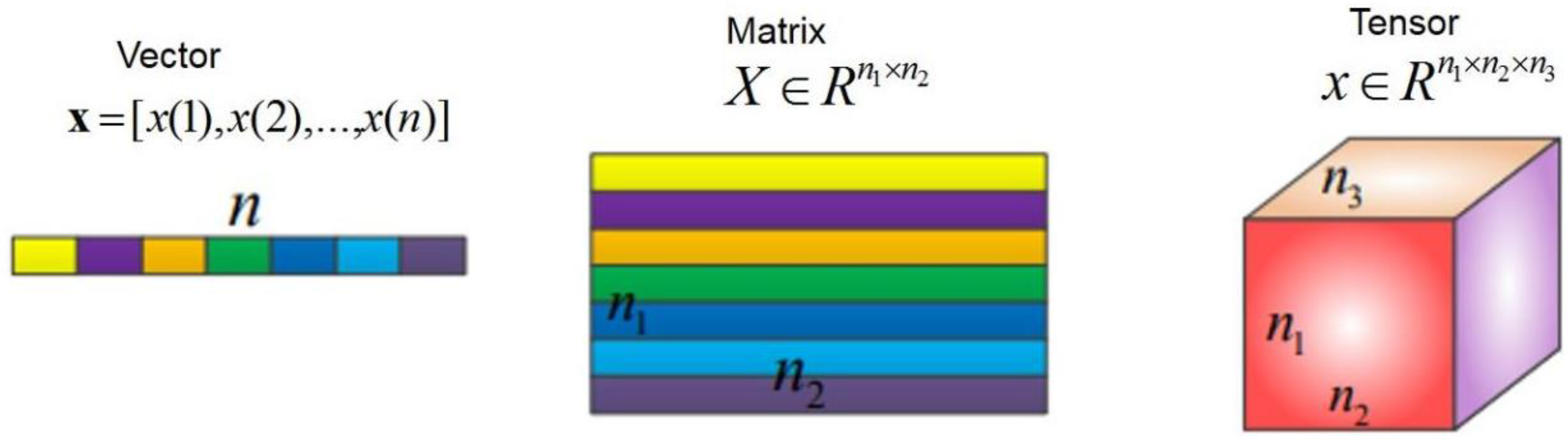
2.1. Parallel Factor Model
2.2. Uniqueness of Parallel Factor Decomposition
3. Hybrid Method with PARAFAC_GA_BP_NN
3.1. Algorithm on PARAFAC
3.1.1. Nuclear Consistency Estimation
3.1.2. Trilinear Alternating Least Squares (TALS)
3.1.3. Algorithm Implementation of Parallel Factor Analysis
- Determining the number of the components F.
- Initialize arrays B and C
- Solve matrix A.
3.2. Algorithm on GA
- (1)
- Random initialization of populations.
- (2)
- Calculate the population fitness values from which the optimal individuals are identified.
- (3)
- Select the chromosomes.
- (4)
- Crossover chromosomes.
- (5)
- mutation of chromosomes.
- (6)
- Determine if the evolution is finished, if not, return to step 2.
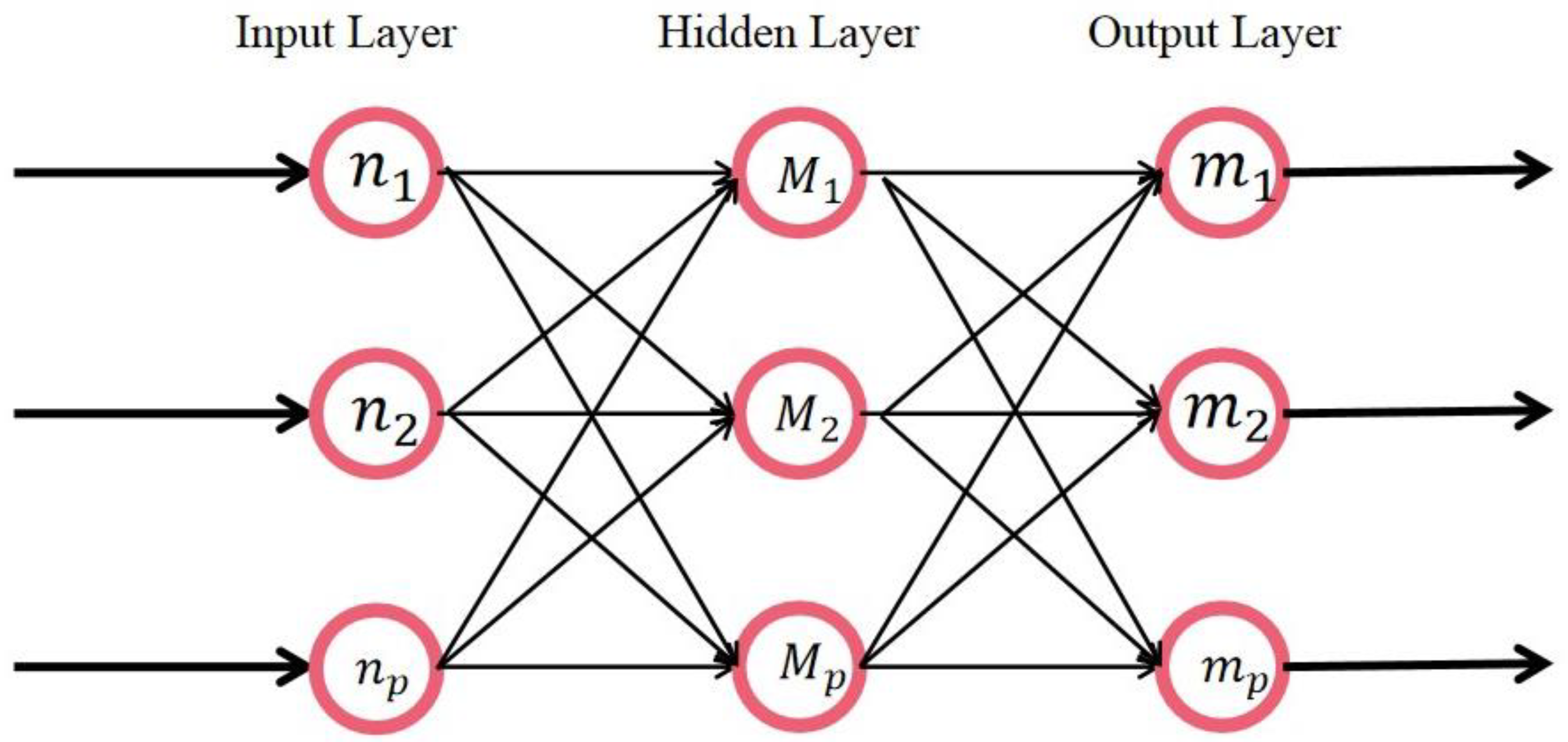
3.3. Principle on BP_NN
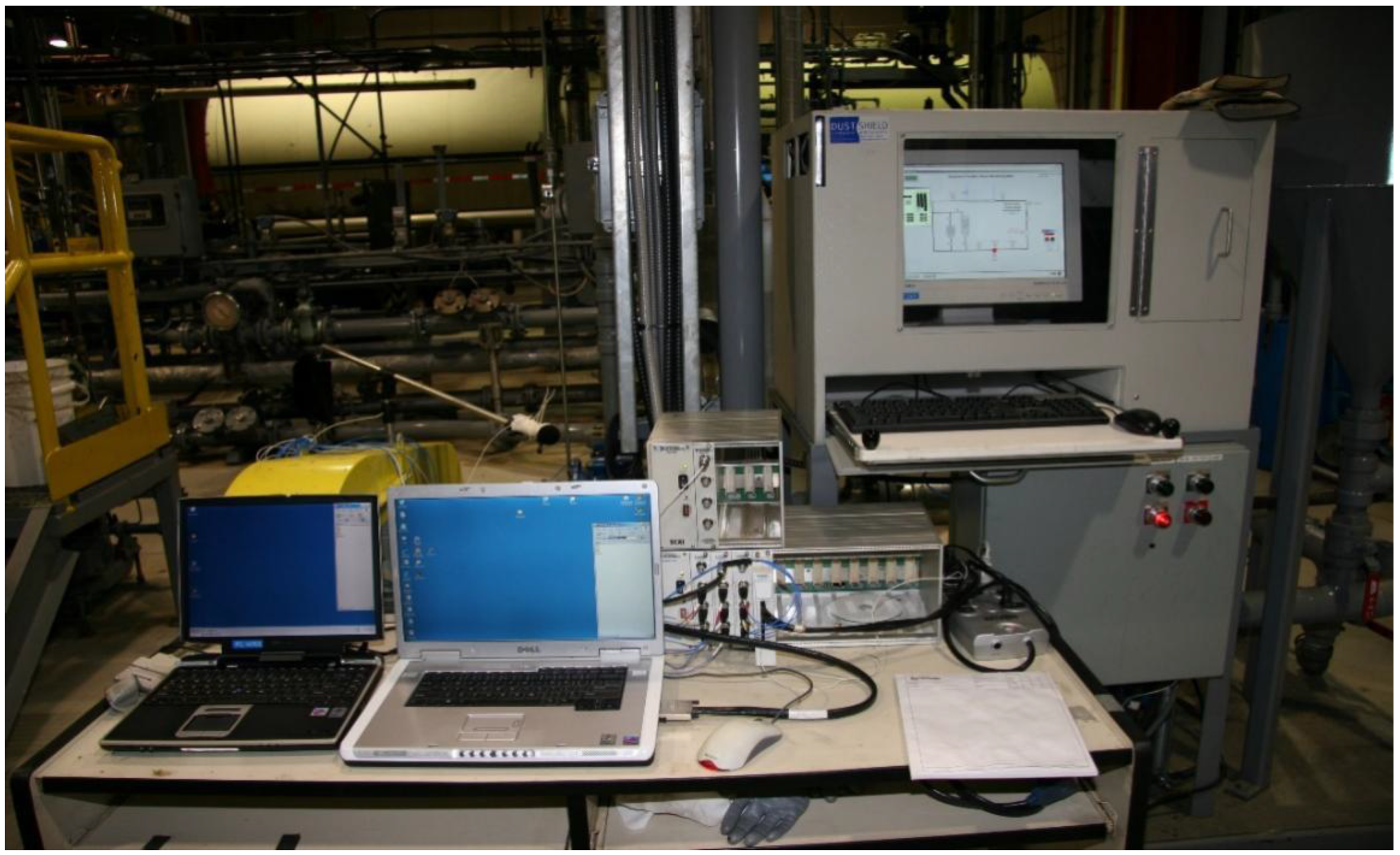
4. Experimental System of Centrifugal Pump
- (1)
- Data collection does not begin until the centrifugal pump is running smoothly.
- (2)
- The sampling frequency satisfies the sampling theorem.
- (3)
- Multiple sets of data are collected for experiments conducted in each state.
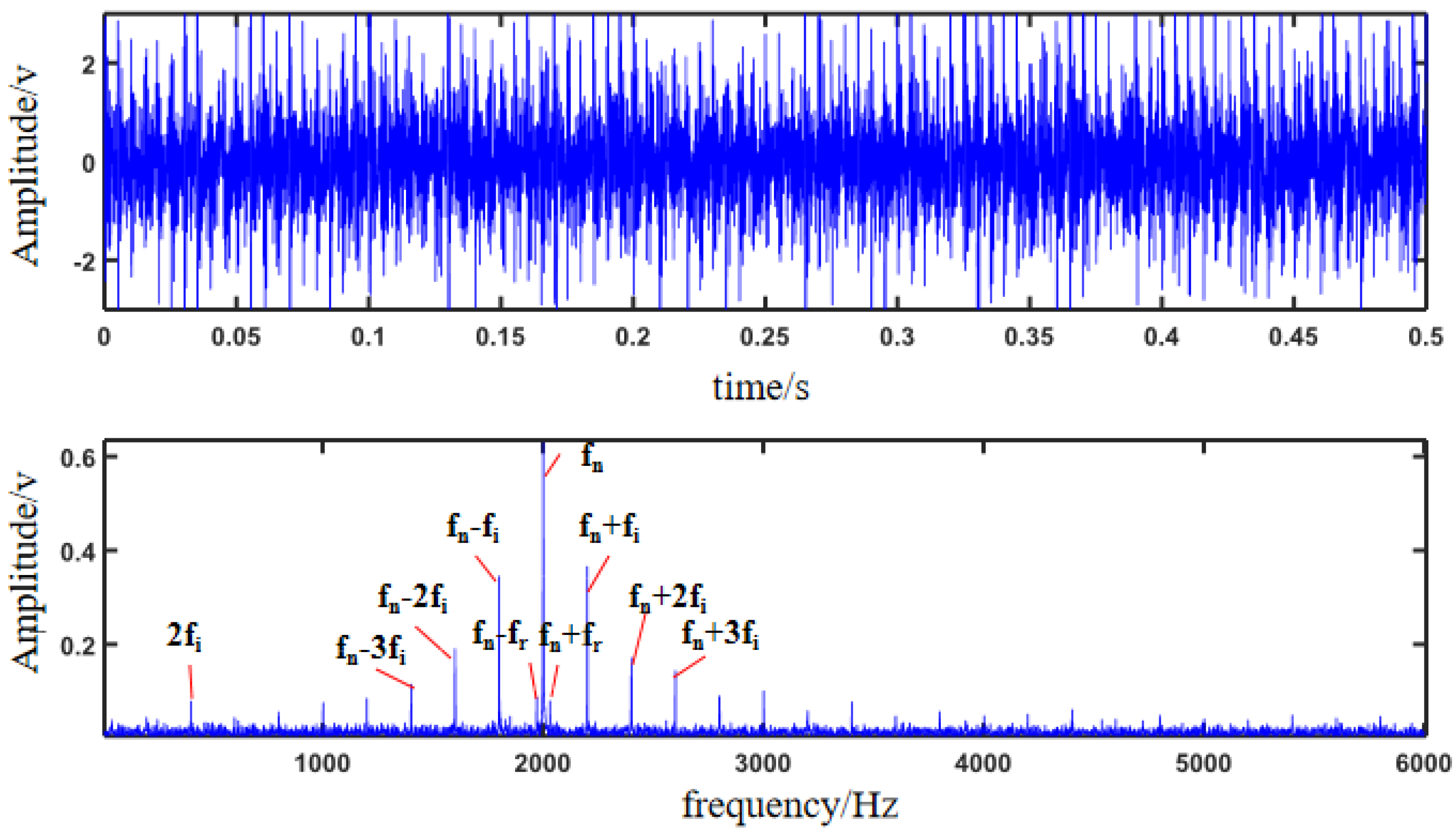
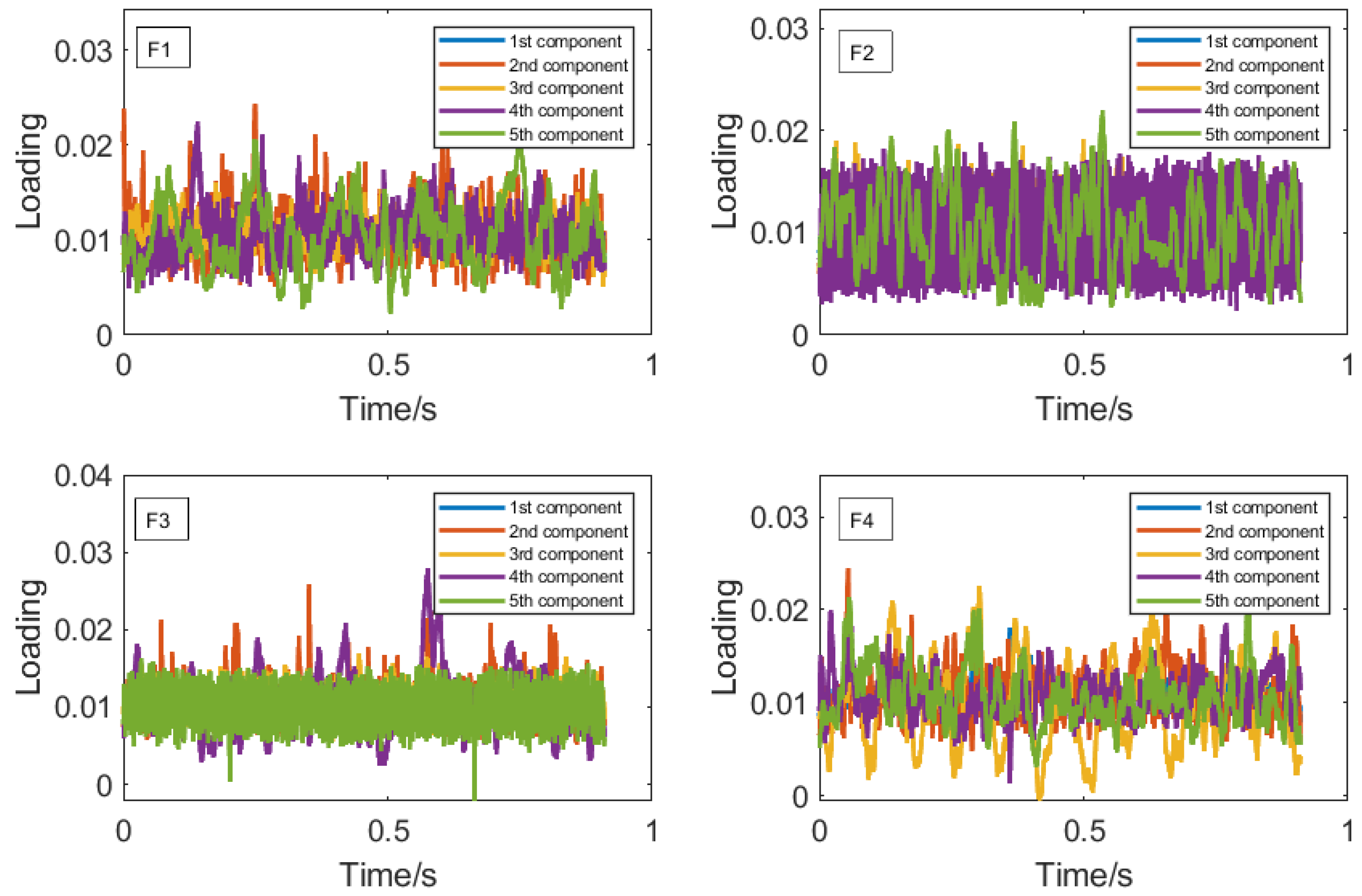
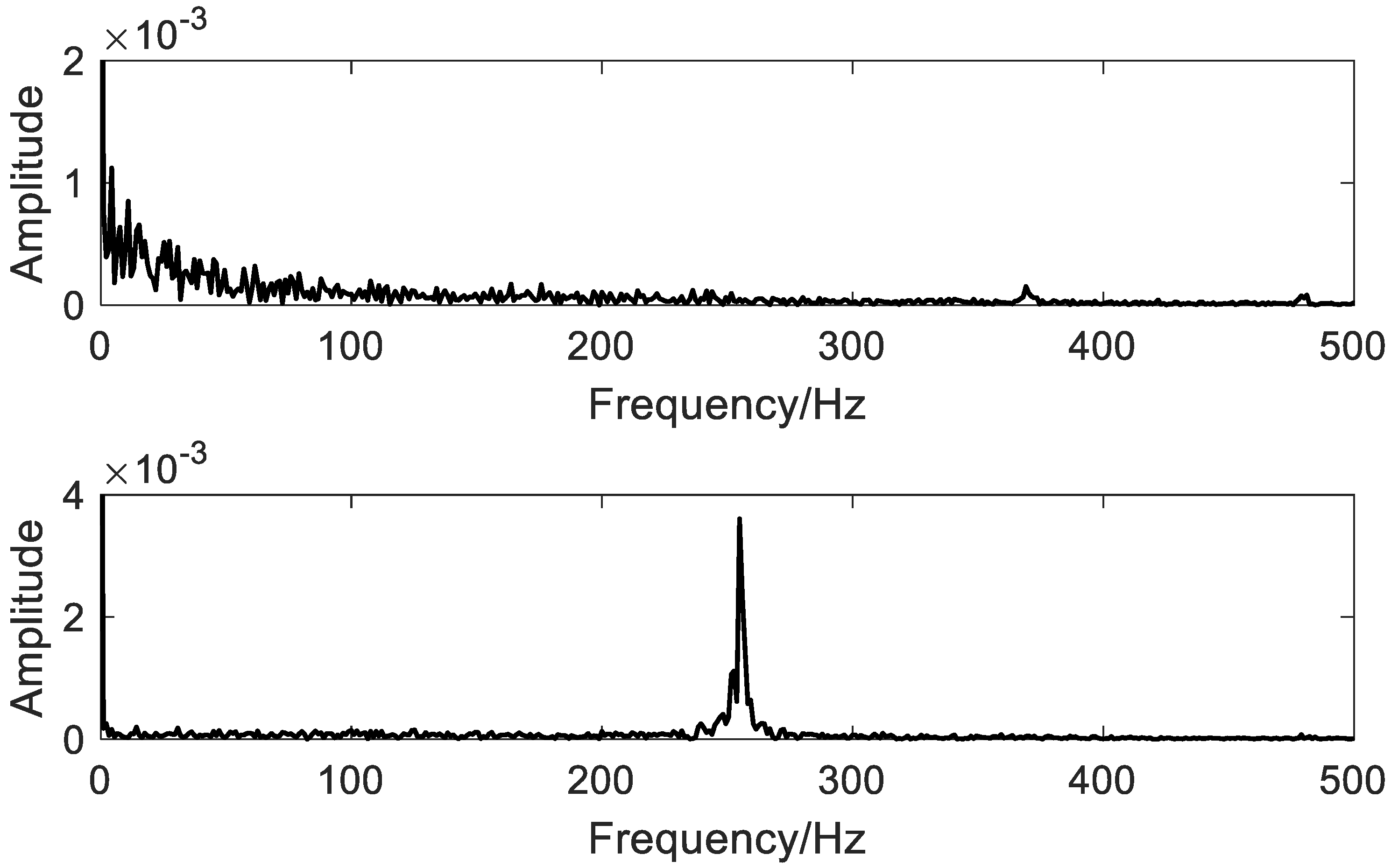
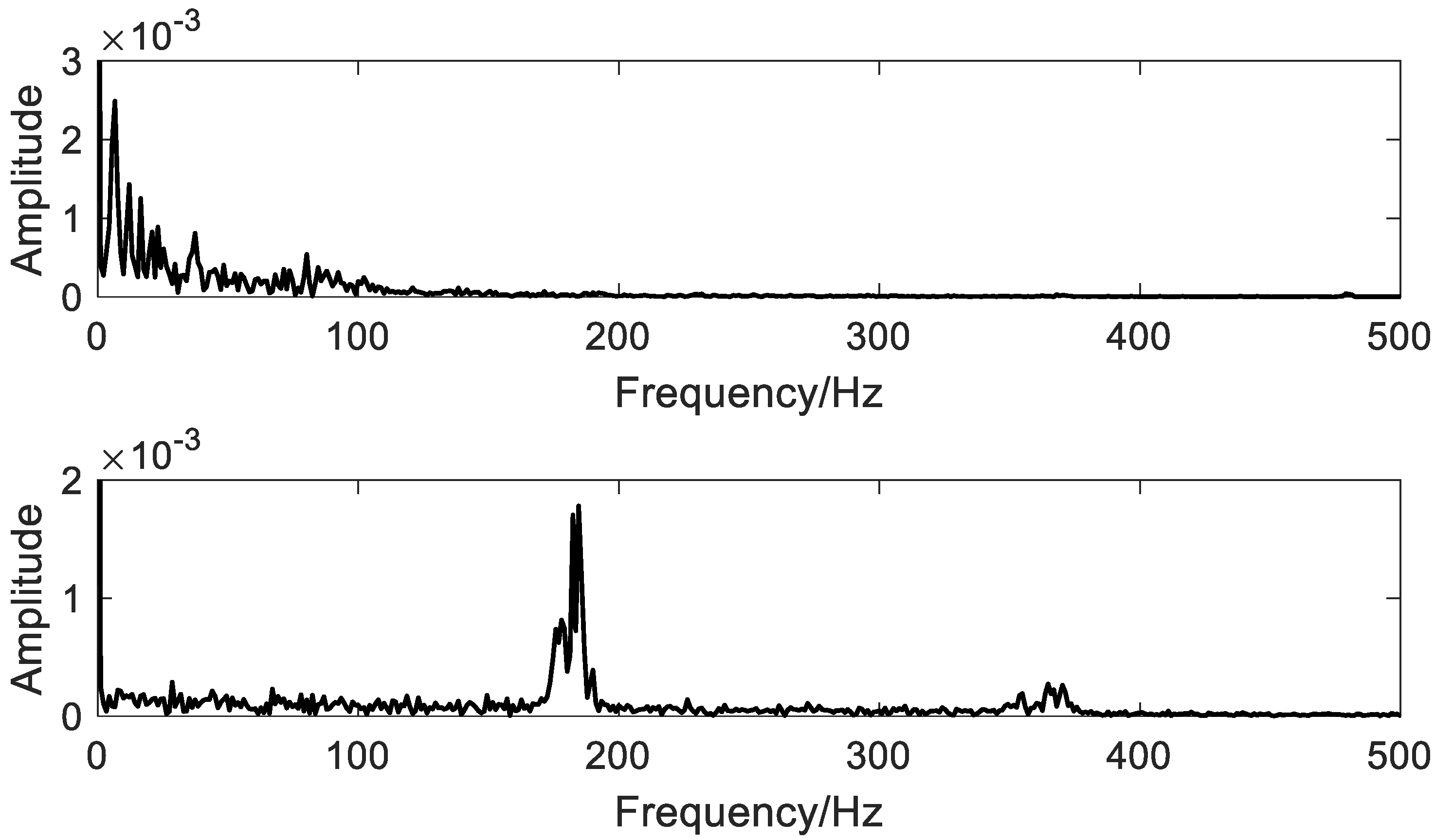
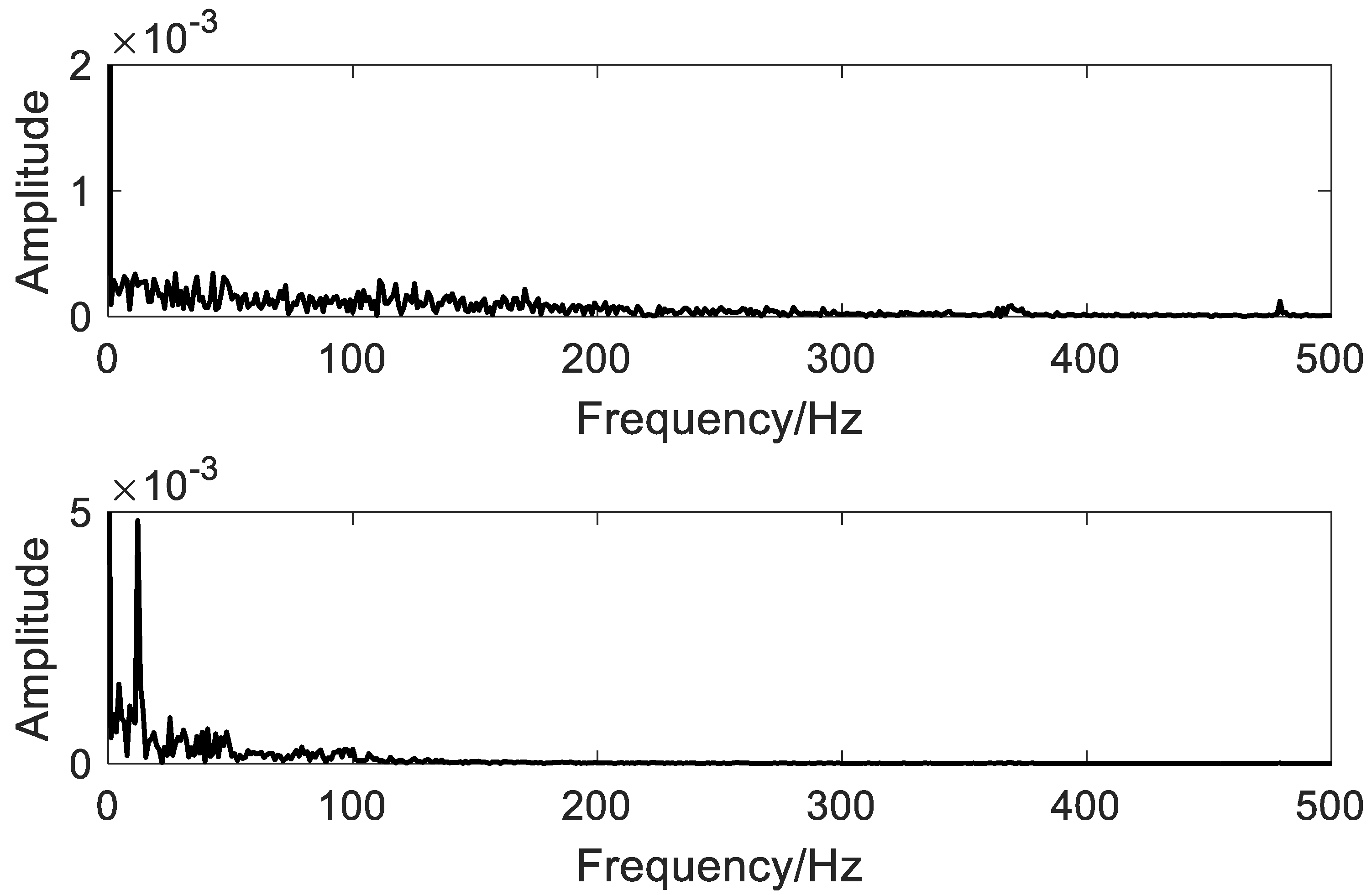
5. Simulated Signal for PARAFAC Analysis
6. Discussion
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, B. A brief discussion on the fault diagnosis and inspection and testing of lifting machinery. China Equip. Eng. 2021, 153–154. [Google Scholar]
- Xia, X.; Lu, Y.; Su, Y.; Yang, J. Mechanical fault diagnosis of high-voltage circuit breaker based on phase space reconstruction and improved GSA-SVM. China Electr. Power 2021, 54, 169–176. [Google Scholar]
- Zhao, P. Research on Vibration Fault Diagnosis Method and System Implementation of Centrifugal Pump. Ph.D. Thesis, North China Electric Power University, Beijing, China, 2011. [Google Scholar]
- Tong, Z.M.; Xin, J.G.; Tong, S.G.; Yang, Z.-Q.; Zhao, J.-Y.; Mao, J.-H. Internal flow structure, fault detection, and performance optimization of centrifugal pumps. J. Zhejiang Univ. Sci. A 2020, 21, 85–117. [Google Scholar] [CrossRef]
- Castellanos Barrios, M.; Serpa, A.L.; Biazussi, J.L.; Verde, W.M.; Natachedo Socorro Dias Arrifano Sassim. Fault identification using a chain of decision trees in an electrical submersible pump operating in a liquid-gas flow. J. Pet. Sci. Eng. 2019, 184, 106490. [Google Scholar] [CrossRef]
- Chen, Y.; Yuan, J.; Luo, Y.; Zhang, W. Fault Prediction of Centrifugal Pump Based on Improved KNN. Shock. Vib. 2021, 2021, 7306131. [Google Scholar] [CrossRef]
- Bordoloi, D.J.; Tiwari, R. Identification of suction flow blockages and casing cavitations in centrifugal pumps by optimal support vector machine techniques. J. Braz. Soc. Mech. Sci. Eng. 2017, 39, 2957–2968. [Google Scholar] [CrossRef]
- Niu, C. Research on Wind Turbine Drive Chain Fault Diagnosis Based on Big Data and Artificial Intelligence. Ph.D. Thesis, Shanxi University, Taiyuan, China, 2019. [Google Scholar]
- Xiaoshuai, G. Research on Online Monitoring and Fault Diagnosis Method of Electric Motor and Centrifugal Pump Set. Ph.D. Thesis, Beijing University of Chemical Technology, Beijing, China, 2020. [Google Scholar]
- Taqvi, S.A.A.; Zabiri, H.; Tufa, L.D.; Uddin, F.; Fatima, S.A.; Maulud, A.S. A Review on Data-Driven Learning Approaches for Fault Detection and Diagnosis in Chemical Processes. ChemBioEng Rev. 2021, 8, 239–259. [Google Scholar] [CrossRef]
- Cui, C.; Lin, W.; Yang, Y.; Kuang, X.; Xiao, Y. A novel fault measure and early warning system for air compressor. Measurement 2019, 135, 593–605. [Google Scholar] [CrossRef]
- Yu, Y.; Li, W.; Sheng, D.; Chen, J. A novel sensor fault diagnosis method based on Modified Ensemble Empirical Mode Decomposition and Probabilistic Neural Network. Measurement 2015, 68, 328–336. [Google Scholar] [CrossRef]
- Favier, G.; de Almeida, A.L.F. Overview of constrained PARAFAC models. Eurasip J. Adv. Signal Process. 2014, 2014, 142. [Google Scholar] [CrossRef] [Green Version]
- Krushal, J.B. Three-way arrays: Rank and uniqueness of trilinear decompositions, with application to artithmetic complexity and statistics. Linear Algebra Its Appl. 1997, 18, 95–138. [Google Scholar] [CrossRef] [Green Version]
- Yang, C. Research on the Application of Parallel Factor Analysis in Blind Separation of Multiple Fault Sources. Ph.D. Thesis, Nanchang University of Aeronautics, Nanchang, China, 2018. [Google Scholar]
- Li, J.F.; Zhang, S.F. Joint angular and Doppler frequency estimation of dual-base MIMO radar based on quadratic linear decomposition. J. Aeronaut. 2012, 33, 1474–1482. [Google Scholar]
- Nion, D.; Sidiropoulos, N.D. A PARAFAC-based technique for detection and localization of multiple targets in a MIMO radar system. In Proceedings of the 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; pp. 2077–2080. [Google Scholar] [CrossRef]
- Weis, M.; Romer, F.; Haardt, M.; Jannek, D.; Husar, P. Multi-dimensional space-time-frequency component analysis of event related EEG data using closed-form PARAFAC. In Proceedings of the 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; pp. 349–352. [Google Scholar] [CrossRef]
- Yang, L.; Chen, H.; Ke, Y.; Huang, L.; Wang, Q.; Miao, Y.; Zeng, L. A novel time–frequency–space method with parallel factor theory for big data analysis in condition monitoring of complex system. Int. J. Adv. Robot. Syst. 2020, 17, 172988142091694. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Yuan, H.; Yu, J.; Zhang, C.; Liu, K. A review on the application of genetic algorithm in optimization problems. Shandong Ind. Technol. 2019, 12, 242–243. [Google Scholar]
- Zhao, G.S.; Huang, D.L.; Zhao, X. Fault diagnosis of mining rolling bearings based on RCMDE and GA-SVM. Coal Technol. 2021, 40, 221–223. [Google Scholar]
- Ma, J.; Meng, L.; Xu, T.; Meng, X. Research on bearing fault diagnosis by genetic radial basis neural network based on FastICA. Mach. Tools Hydraul. 2021, 49, 188–192. [Google Scholar]
- Rastegar, R.; Hariri, A. A Step Forward in Studying the Compact Genetic Algorithm. Evol. Comput. 2006, 14, 277–289. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, Y.; He, M. Improved artificial neural network based on intelligent optimization algorithm. Neural Netw. World 2018, 28, 345–360. [Google Scholar] [CrossRef] [Green Version]
- Lv, Y.; Liu, W.; Wang, Z.; Zhang, Z. WSN Localization Technology Based on Hybrid GA-PSO-BP Algorithm for Indoor Three-Dimensional Space. Wirel. Pers. Commun. 2020, 114, 167–184. [Google Scholar] [CrossRef]
- Han, X.; Wei, Z.; Zhang, B.; Li, Y.; Du, T.; Chen, H. Crop evapotranspiration prediction by considering dynamic change of crop coefficient and the precipitation effect in back-propagation neural network model. J. Hydrol. 2021, 596, 126104. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Rated Voltage (V) | Maximum Speed (RPM) | Rated Speed (RPM) | Rated Ambient Temperature (°C) | Rated Power (HP) | Overload Factor | Motor Size |
|---|---|---|---|---|---|---|---|
| 230/460 | 1200 | 1180 | 40 | 40 | 1.15 | 362 T |
| Output Label | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| F1 | 1 | 0 | 0 | 0 |
| F2 | 0 | 1 | 0 | 0 |
| F3 | 0 | 0 | 1 | 0 |
| F4 | 0 | 0 | 0 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY-NC-ND) license (https://creativecommons.org/licenses/by-nc-nd/4.0/).
Share and Cite
Chen, H.; Li, S.; Li, M. Multi-Channel High-Dimensional Data Analysis with PARAFAC-GA-BP for Nonstationary Mechanical Fault Diagnosis. Int. J. Turbomach. Propuls. Power 2022, 7, 19. https://0-doi-org.brum.beds.ac.uk/10.3390/ijtpp7030019
Chen H, Li S, Li M. Multi-Channel High-Dimensional Data Analysis with PARAFAC-GA-BP for Nonstationary Mechanical Fault Diagnosis. International Journal of Turbomachinery, Propulsion and Power. 2022; 7(3):19. https://0-doi-org.brum.beds.ac.uk/10.3390/ijtpp7030019
Chicago/Turabian StyleChen, Hanxin, Shaoyi Li, and Menglong Li. 2022. "Multi-Channel High-Dimensional Data Analysis with PARAFAC-GA-BP for Nonstationary Mechanical Fault Diagnosis" International Journal of Turbomachinery, Propulsion and Power 7, no. 3: 19. https://0-doi-org.brum.beds.ac.uk/10.3390/ijtpp7030019