Given the results from the sensors and gauges, the next step in the study was the development of maintenance intervention strategies based on triggers that could be inferred from the results. To allow for this comparison to be done, a baseline was created of a typical predefined maintenance strategy, over a 30-year period. Environmental impacts imposed during the maintenance of a specific road stretch could then be compared with the equivalent impacts originating from the maintenance strategy of the same road stretch and period, after utilizing information from the sensors and gauges, optimizing the maintenance strategy. The current approach was setup based on inputs from local experts and previous work in the sector on baseline maintenance strategies [
33,
34]. This baseline pre-set maintenance plan is given below in
Table 2.
The optimized approaches were then generated utilizing information from the gauges as triggers for intervention strategies on the pavement, and are explained in the following section.
5.1. Optimized Plan Based on PFG Sensors Response
In order to determine an optimized plan for the PFG sensors, a correct threshold definition is essential for the cumulative voltage time (CVT) approach. This study used percentiles P-95 and P-05 to define the upper and lower limits (D7 and D1, respectively) based on the entire responses for each PFG sensor. Once D1 and D7 have been defined, equally space values are calculated (D2 to D6).
Table 3 shows the seven thresholds for PFG–H3/H7 and activation number for the “waking-up” of the sensor along with the number of load applications. “Waking-up” of the sensor signifies that it starts recording after a particular number of load applications.
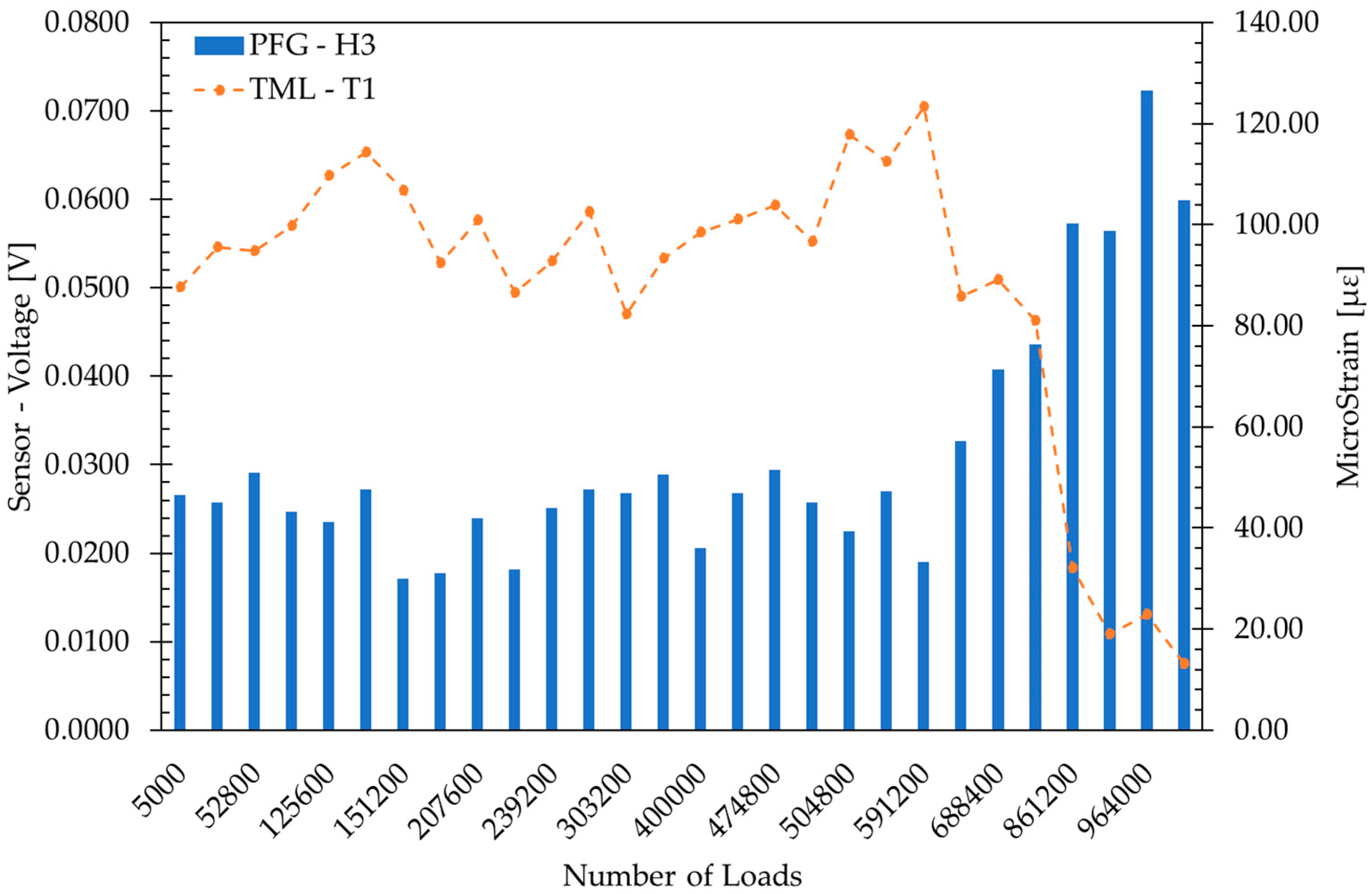
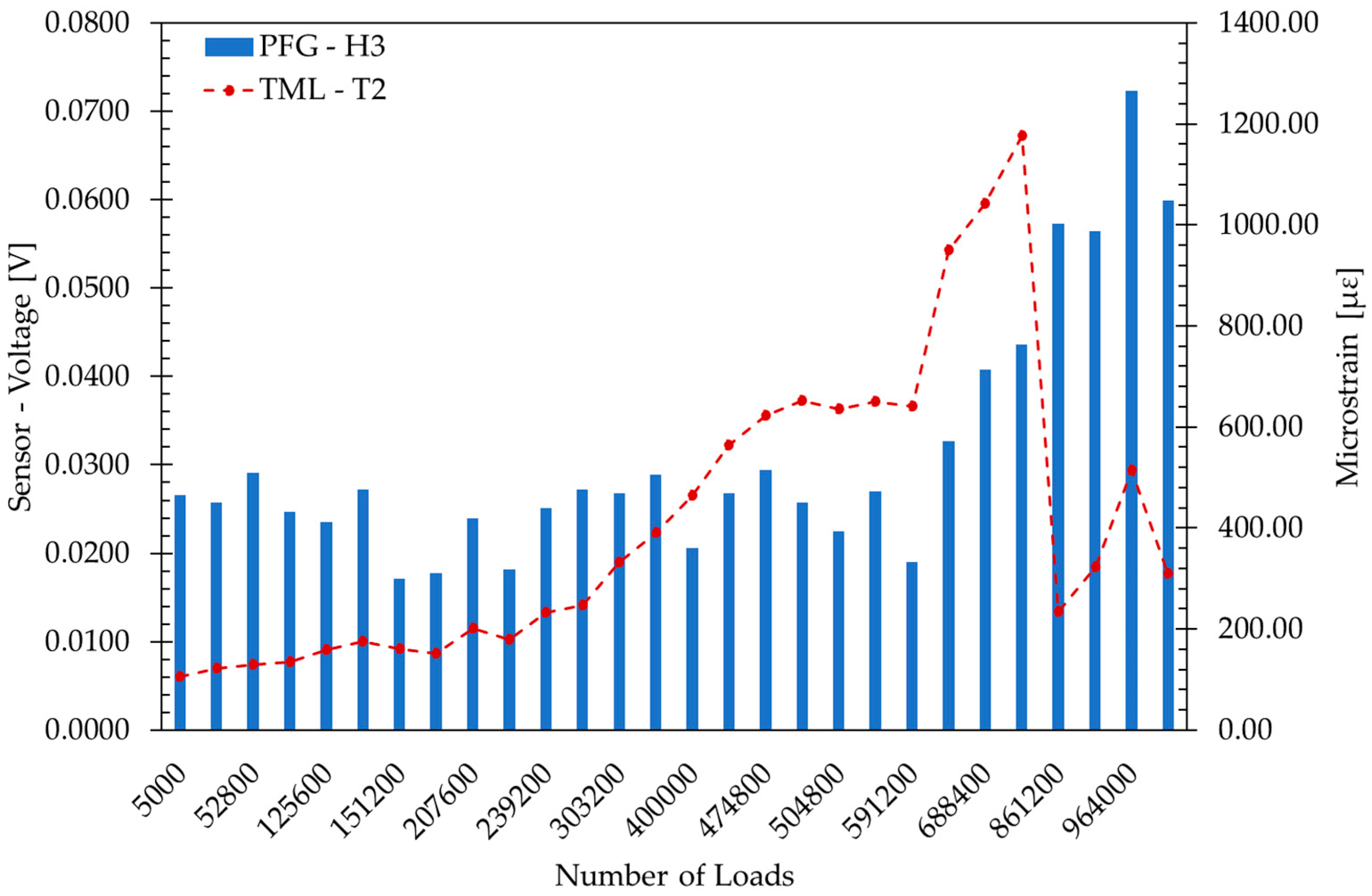
Figure 11 (top) shows the CVT for sensor H3, whereas
Figure 11 (bottom) shows the CVT for sensor H7.
Using
Figure 9,
Figure 10 and
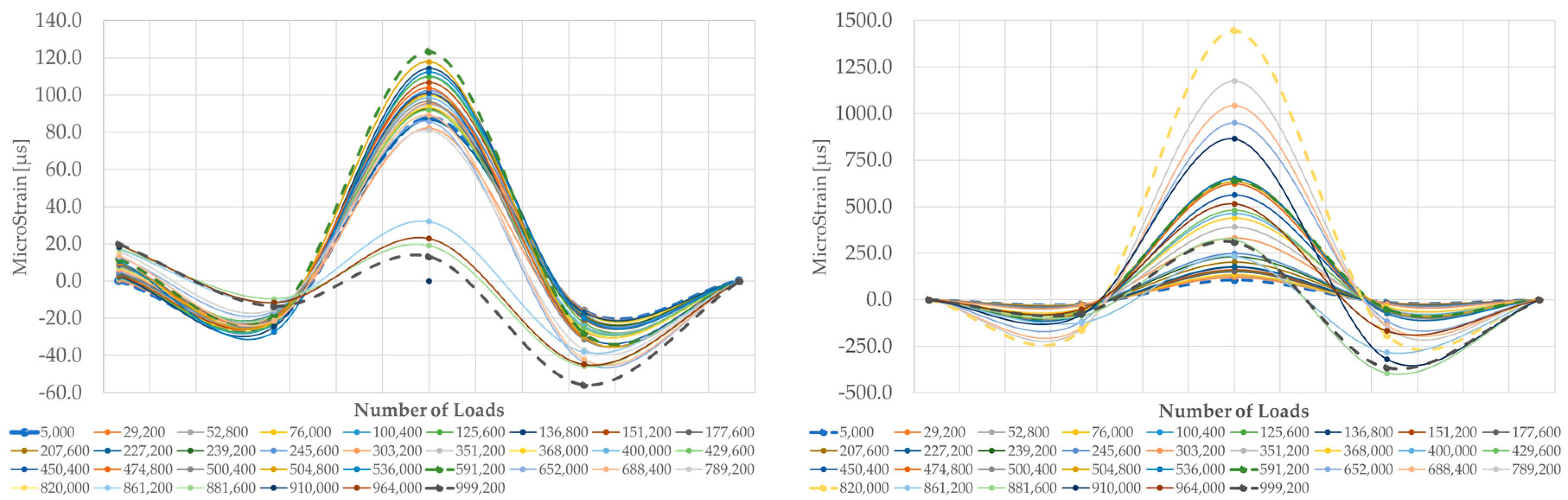
Figure 11, there are specific points that clearly stand out where the change in response, slope, denotes the appearance of damage.
Figure 11 (top) supports the previous statement where the “waking-up” of threshold level 3 and onwards occurs. Points located at 125,000, 591,200, and 789,200 load repetitions (3.0, 12.0, and 16.0 years, respectively) were thus selected for developing the maintenance strategies.
At a loading value of 125,000 (equivalent to 3 years of the life cycle), threshold level 2 comes alive. This can be considered as a point where the post-compaction of the AC layer is concluded and damage starts to grow, but at this point, it is also considered as low severity distress. Given that the sensors have indicated that there is something wrong, the routine maintenance that was expected to be carried out at year 8 can be moved up to now take place two years after the sensors have indicated that something is wrong. This intervention is routine maintenance, characterized by minor surface treatments.
The next instance of noted change by the sensors is at an equivalent load of 591,200 (equivalent to 12 years of the life cycle). At this point, the values of threshold levels 1 and 2 have kept growing as expected. The damage is now considered as medium severity, as threshold levels 1 and 2 have changed their slope and threshold levels 3 and 4 are becoming alive as well. Therefore, given this development, another intervention at year 14 can be planned. At year 13 (two years after the trend has now picked up on the sensor/gauge), intervention 1 and 3 can be introduced instead of waiting for year 15, as was planned in the pre-set maintenance plan. Additionally, intervention 2 can be introduced midway between these planned interventions given the fact that the sensor shows the distress is evolving, and this would enable its development to be reduced, prolonging the necessity of corrective maintenance.
At a loading of 789,200 (equivalent to year 16 in the life cycle), the values at threshold levels 1 and 2 grow with no variation in their slope; nonetheless, the values of threshold levels 3 and 4 have increased and threshold levels 5, 6, and 7 have been initiated. This, therefore, infers that the damage is now considered as medium/high severity, indicating that surface cracks are imminent. Therefore, in the optimized plan, interventions can be planned to extend the point at which this will happen. Subsequently, using intervention 3 along with the routine maintenance would be an intervention of less financial impact than that of intervention 4, which is scheduled at year 15 in the baseline.
It is necessary to note here that, while the sensors in the experimental section only provided data for 20 years, these data do allow for a projection of what can happen over a 30-year period, and thus enable the environmental evaluation over this period. This is based on the common interventions over similar times [
33], and thus enable the environmental evaluation over this period. As interventions in years 0–20 have been shifted, the subsequent interventions in the following 10 years can then be shifted as well. Therefore, the next intervention to account for is intervention 4 (shown at year 15 in the baseline). In the optimized approach, intervention 1 can be introduced at year 19 (given the inclusion of a thin overlay at year 13), which accounts for routine surface maintenance. This is in line with the visual inspections in the study, showing cracking appearing at a loading of 910,000 (equivalent to year 18). Consequently, major intervention 4 can be performed at year 23, which would then be at a similar stage to that of an intervention in the baseline given the shift of processes.
Finally, at year 30, interventions 1 and 3 can be introduced, which would be at a similar stage to that of an intervention in the baseline, but much less significant than the full intervention 5. This, therefore, indicates that, within the optimized 30-year period under analysis, intervention 5 is not carried out. It must be noted that, over the full life cycle of the pavement, this intervention would be needed. However, by lengthening its life expectancy carrying out more preventative and correction intervention actions, intervention 5 has been shifted out of the assessment period. This means that the impacts, both financially and environmentally, would be spread over a longer period. Considering the loading values and the inferences made from the gate activity, the optimized maintenance plan is given in
Table 4.
5.2. Optimized Plan Based on Asphalt Strain Gauges Response
For the strain gauges utilized in the test section, similar trigger points were observed (
Figure 9 and
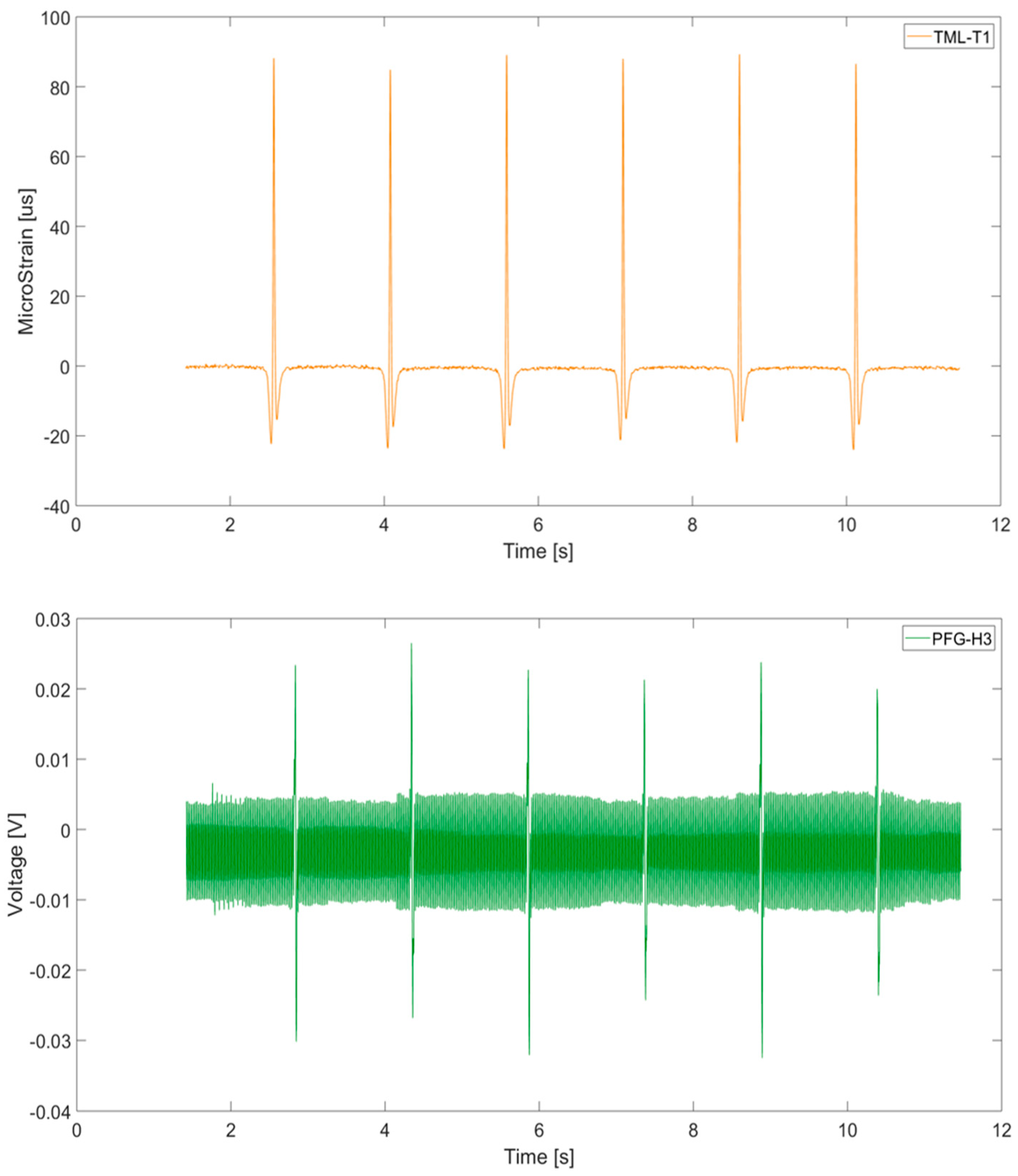
Figure 10). Considering the trend shown by sensor T1 (
Figure 9), the first point to be considered as a trigger for intervention is at 207,600 loads (equivalent to four years). This point is based on the standard deviation of the max values shown from the sensor, which indicate that there is some damage is occurring within the pavement. The routine maintenance that was expected to be carried out at year 8 can be moved up to two years after the sensors have indicated that something is wrong, similar to the approach taken with the results from the PFG sensors. This is a year after the similar intervention is done with sensor H3. The next instance of noted change by the gauges is at an equivalent load of 591,200 (equivalent to 12 years of the life cycle), which again is similar to the results of sensor H3. However, given that the first noted change from the gauges is a year later than the PFG sensors, it can reasonably be assumed that the damage would have worsened further without any action, as opposed to the road monitoring scenario with the PFG sensor. This assumption is appropriate given the fact that it is the same pavement under analysis. Given this, an additional routine maintenance was inserted to ensure the condition is kept optimal. Therefore, routine maintenance intervention 1 was inserted at year 11 along with intervention 2 at year 10. Intervention 2 can be introduced midway between these planned interventions given the fact that the gauge is showing the distress is evolving, and this would enable its development to be reduced, prolonging the necessity of corrective maintenance. Subsequently, at year 15, intervention 1 and 3 can be introduced at the same point that intervention 4 was planned in the pre-set maintenance plan.
A similar approach, as applied with the plan for the PFG sensors, for the interventions taking place between years 20–30 was also applied for the strain gauge. Therefore, the next intervention to account for is intervention 4 (shown at year 15 in the baseline). In the optimized approach, intervention 1 can be introduced at year 20 (given the inclusion of a thin overlay at year 15), which accounts for routine surface maintenance. This is also in line with the results from the PFG sensors indicating that, at a loading of 900,000 (equivalent to year 18), there are cracks appearing at the surface. Then, subsequent to this, major intervention 4 can be performed at year 24, which would then be at a similar stage to that of an intervention in the baseline given the shift of processes.
Finally, at year 30, interventions 1 and 3 can be introduced, which would be at a similar stage to that of an intervention in the baseline, but much less than the full intervention 5. Considering the loading values and the inferences made from the threshold activity, the optimized maintenance plan is given in
Table 5.
Comparable to the optimized plan for the sensors, intervention 5 is not carried out. Additionally, as previously indicated, within the full life cycle of pavement (which would now be more than the 30 years under analysis), this intervention would be needed. Similar to the plan for sensor H3, the impacts, both financially and environmentally, would be allocated over a longer period, making the effect less per year.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}