Voltage Differential Protection for Series Arc Fault Detection in Low-Voltage DC Systems

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
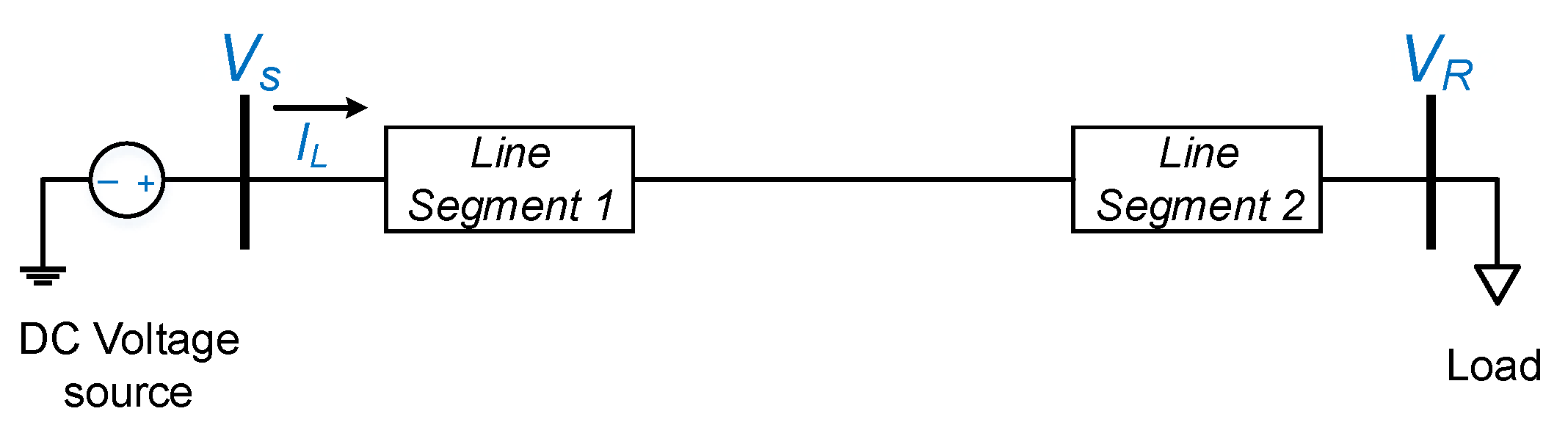
2. Concept and Approach
3. Demonstration
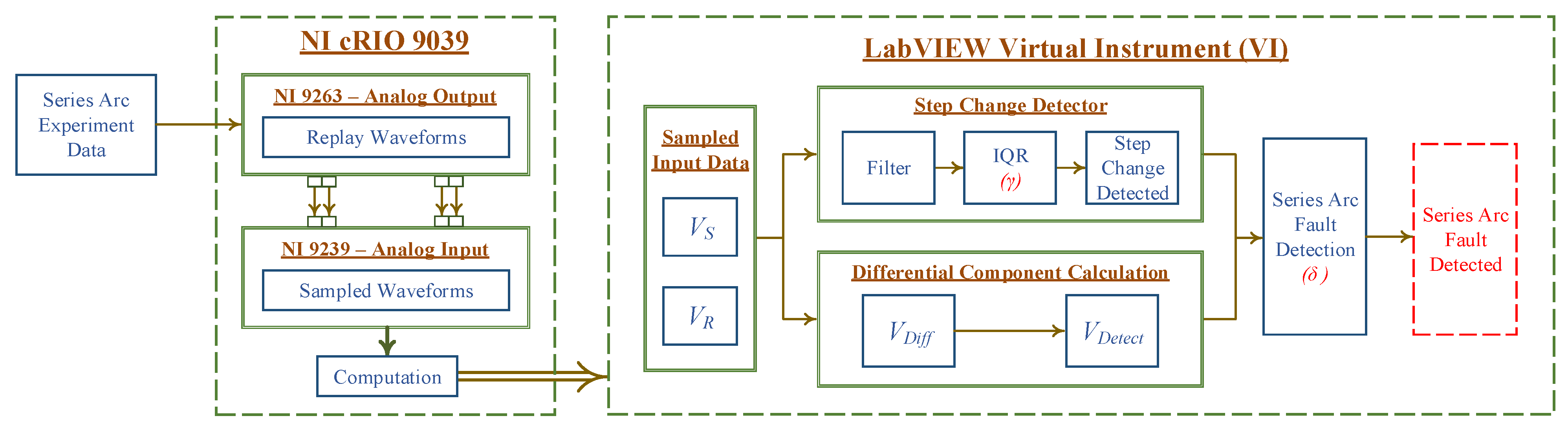
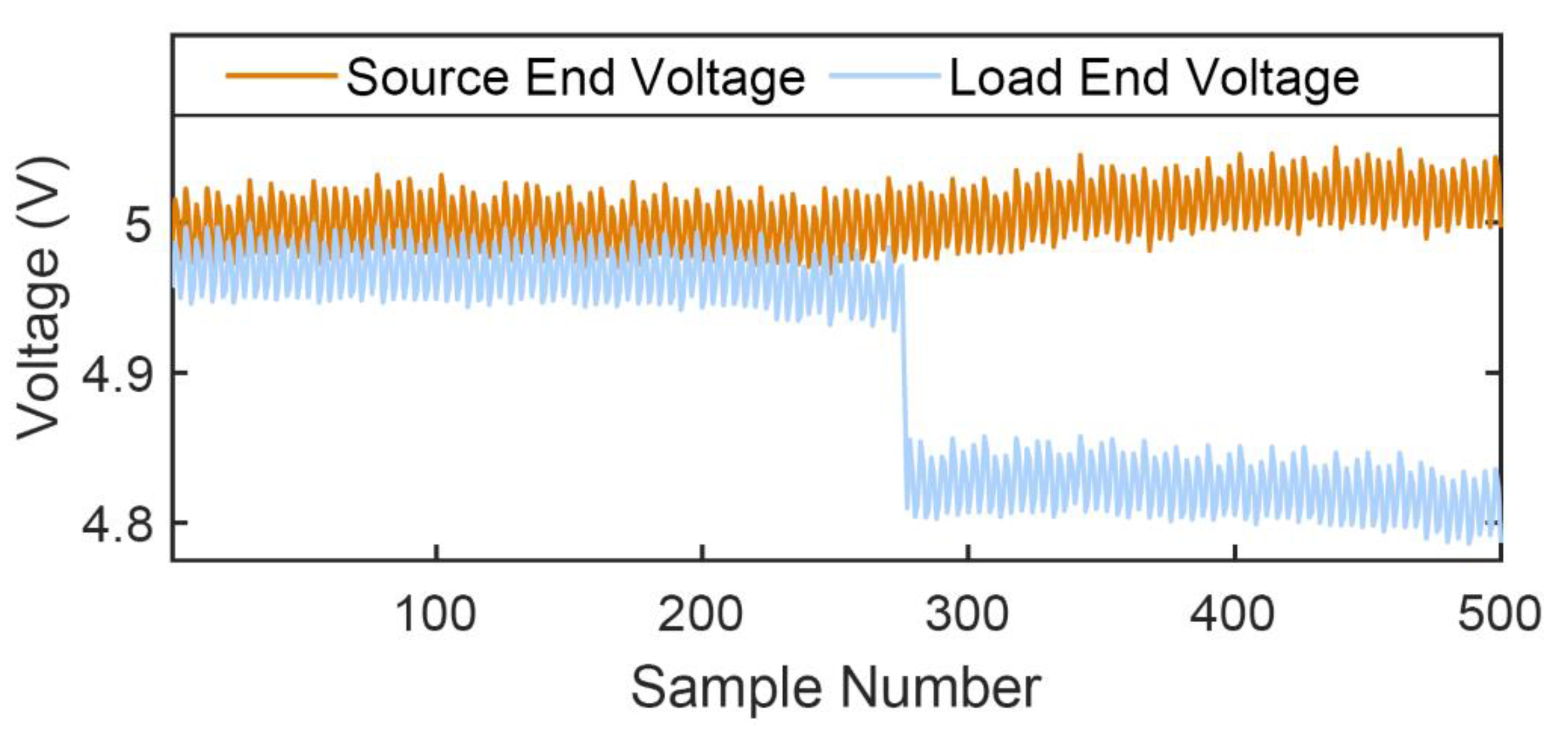
3.1. Test Setup and Data
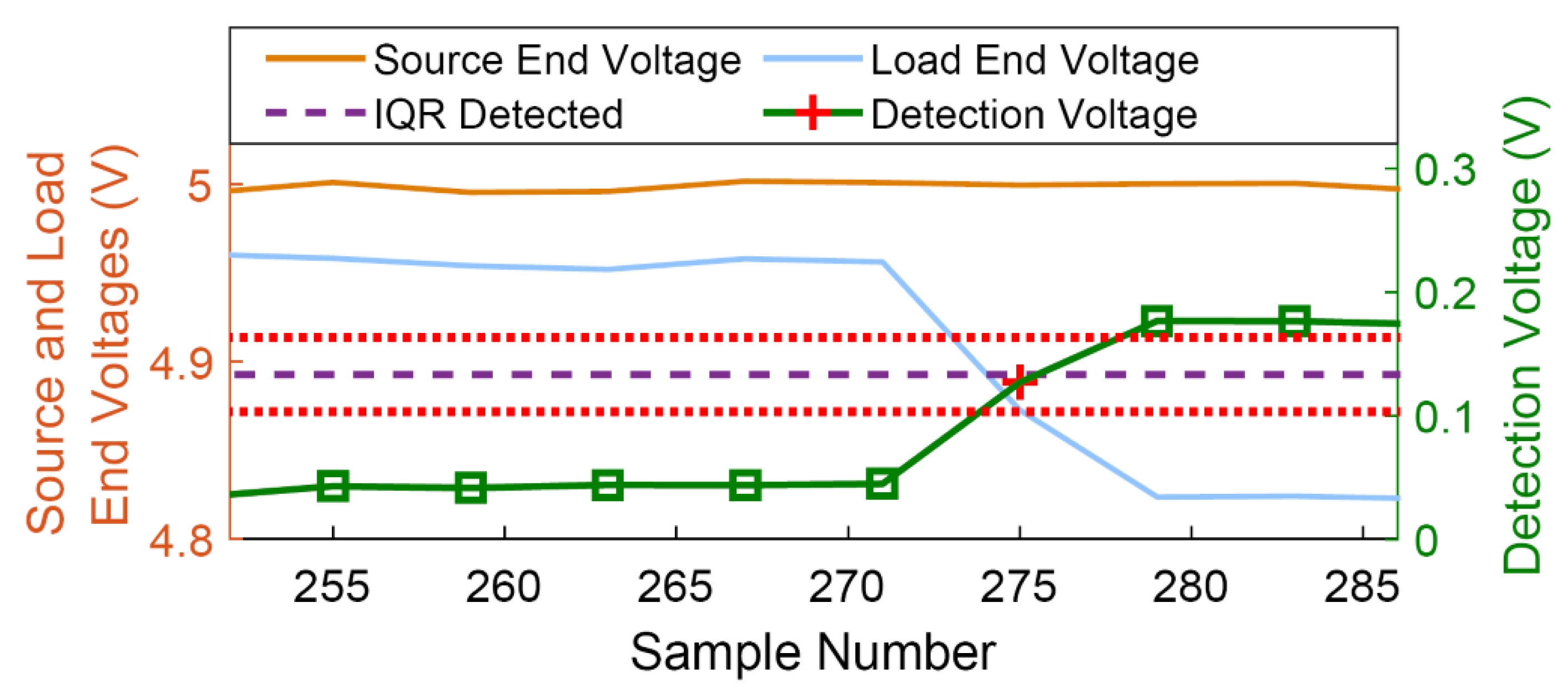
3.2. Proposed Approach
4. Discussion
4.1. Sharp Load Change
4.2. Loss of Time Synchronization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qi, L.; Antoniazzi, A.; Raciti, L. DC Distribution Fault Analysis, Protection Solutions, and Example Implementations. IEEE Trans. Ind. Appl. 2018, 54, 3179–3186. [Google Scholar] [CrossRef]
- Alam, M.K.; Khan, F.; Johnson, J.; Flicker, J. A Comprehensive Review of Catastrophic Faults in PV Arrays: Types, Detection, and Mitigation Techniques. IEEE J. Photovolt. 2015, 5, 982–997. [Google Scholar] [CrossRef]
- Mellit, A.; Tina, G.; Kalogirou, S. Fault detection and diagnosis methods for photovoltaic systems: A review. Renew. Sustain. Energy Rev. 2018, 91, 1–17. [Google Scholar] [CrossRef]
- Naidu, M.; Schoepf, T.J.; Gopalakrishnan, S. Arc fault detection scheme for 42-V automotive DC networks using current shunt. IEEE Trans. Power Electron. 2006, 21, 633–639. [Google Scholar] [CrossRef]
- Xiong, Q.; Feng, X.; Gattozzi, A.L.; Liu, X.; Zheng, L.; Zhu, L.; Ji, S.; Hebner, R.E. Series Arc Fault Detection and Localization in DC Distribution System. IEEE Trans. Instrum. Meas. 2020, 69, 122–134. [Google Scholar] [CrossRef]
- Xiong, Q.; Liu, X.; Feng, X.; Gattozzi, A.L.; Shi, Y.; Zhu, L.; Ji, S.; Hebner, R.E. Arc Fault Detection and Localization in Photovoltaic Systems Using Feature Distribution Maps of Parallel Capacitor Currents. IEEE J. Photovolt. 2018, 8, 1090–1097. [Google Scholar] [CrossRef]
- Lu, S.; Phung, B.; Zhang, D. A comprehensive review on DC arc faults and their diagnosis methods in photovoltaic systems. Renew. Sustain. Energy Rev. 2018, 89, 88–98. [Google Scholar] [CrossRef]
- Telford, R.D.; Galloway, S.; Stephen, B.; Elders, I. Diagnosis of Series DC Arc Faults—A Machine Learning Approach. IEEE Trans. Ind. Inform. 2017, 13, 1598–1609. [Google Scholar] [CrossRef] [Green Version]
- Yao, X.; Herrera, L.; Ji, S.; Zou, K.; Wang, J. Characteristic Study and Time-Domain Discrete-Wavelet-Transform Based Hybrid Detection of Series DC Arc Faults. IEEE Trans. Power Electron. 2014, 29, 3103–3115. [Google Scholar] [CrossRef]
- Weerasekara, M.; Vilathgamuwa, M.; Mishra, Y. Modelling of DC arcs for photovoltaic system faults. In Proceedings of the IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Ammerman, R.F.; Gammon, T.; Sen, P.K.; Nelson, J.P. DC-Arc Models and Incident-Energy Calculations. IEEE Trans. Ind. Appl. 2010, 46, 1810–1819. [Google Scholar] [CrossRef]
- Gammon, T.; Lee, W.; Zhang, Z.; Johnson, B.C. A Review of Commonly Used DC Arc Models. IEEE Trans. Ind. Appl. 2015, 51, 1398–1407. [Google Scholar] [CrossRef]
- Uriarte, F.M.; Gattozzi, A.L.; Herbst, J.D.; Estes, H.B.; Hotz, T.J.; Kwasinski, A.; Hebner, R.E. A DC Arc Model for Series Faults in Low Voltage Microgrids. IEEE Trans. Smart Grid 2012, 3, 2063–2070. [Google Scholar] [CrossRef] [Green Version]
- Seo, G.; Kim, K.A.; Lee, K.; Lee, K.; Cho, B. A new DC arc fault detection method using DC system component modeling and analysis in low frequency range. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 2438–2444. [Google Scholar] [CrossRef]
- Li, J.; Thomas, D.W.P.; Sumner, M.; Christopher, E.; Cao, Y. Series Arc fault studies and modeling for a DC distribution system. In Proceedings of the IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Kowloon, China, 8–11 December 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Ananthan, S.N.; Bastos, A.F.; Santoso, S.; Feng, X.; Penney, C.; Gattozzi, A.; Hebner, R. Signatures of series arc faults to aid arc detection in low-voltage DC systems. In Proceedings of the IEEE Power and Energy Society General Meeting (PESGM), Montreal, QC, Canada, 2–6 August 2020; pp. 1–5. [Google Scholar]
- Paithankar, Y.; Bhide, S. Fundamentals of Power System Protection; Prentice-Hall of India Pvt. Ltd.: New Delhi, India, 2003. [Google Scholar]
- Johnson, J.; Kang, J. Arc-fault detector algorithm evaluation method utilizing prerecorded arcing signatures. In Proceedings of the 38th IEEE Photovoltaic Specialists Conference, Austin, TX, USA, 3–8 June 2012; pp. 001378–001382. [Google Scholar]
- Brunello, G.; Voloh, I.; Hall, I.; Fitch, J. Current differential relaying—coping with communications channel asymmetry. In Proceedings of the Eighth IEE International Conference on Developments in Power System Protection, Amsterdam, The Netherlands, 13 December 2004; Volume 2, pp. 821–824. [Google Scholar]
- Southern, E.P.; Li, H.Y.; Crossley, P.A.; Potts, S.; Weller, G.C. GPS synchronised current differential protection. In Proceedings of the Sixth International Conference on Developments in Power System Protection, Nottingham, UK, 25–27 March 1997; pp. 342–345. [Google Scholar]
- Ferrer, H.J.A.; Schweitzer, E.O. Modern Solutions for Protection, Control, and Monitoring of Electric Power Systems; Schweitzer Engineering Laboratories: Pullman, WA, USA, 2010. [Google Scholar]
- Shekhar, A.; Ramírez-Elizondo, L.; Bandyopadhyay, S.; Mackay, L.; Bauera, P. Detection of Series Arcs Using Load Side Voltage Drop for Protection of Low Voltage DC Systems. IEEE Trans. Smart Grid 2018, 9, 6288–6297. [Google Scholar] [CrossRef] [Green Version]
- Wong, T.J.; Das, N. Modelling and analysis of IEC 61850 for end-to-end delay characteristics with various packet sizes in modern power substation systems. In Proceedings of the 5th Brunei International Conference on Engineering and Technology, Bandar Seri Begawan, Brunei, 1–3 November 2014; pp. 1–6. [Google Scholar]
- Falahati, B.; Mousavi, M.J.; Vakilian, M. Latency consi derations in IEC 61850-enabled Substation Automation Systems. In Proceedings of the IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navalpakkam Ananthan, S.; Feng, X.; Penney, C.; Gattozzi, A.; Hebner, R.; Santoso, S. Voltage Differential Protection for Series Arc Fault Detection in Low-Voltage DC Systems. Inventions 2021, 6, 5. https://0-doi-org.brum.beds.ac.uk/10.3390/inventions6010005
Navalpakkam Ananthan S, Feng X, Penney C, Gattozzi A, Hebner R, Santoso S. Voltage Differential Protection for Series Arc Fault Detection in Low-Voltage DC Systems. Inventions. 2021; 6(1):5. https://0-doi-org.brum.beds.ac.uk/10.3390/inventions6010005
Chicago/Turabian StyleNavalpakkam Ananthan, Sundaravaradan, Xianyong Feng, Charles Penney, Angelo Gattozzi, Robert Hebner, and Surya Santoso. 2021. "Voltage Differential Protection for Series Arc Fault Detection in Low-Voltage DC Systems" Inventions 6, no. 1: 5. https://0-doi-org.brum.beds.ac.uk/10.3390/inventions6010005