Image Registration with Particles, Examplified with the Complex Plasma Laboratory PK-4 on Board the International Space Station


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
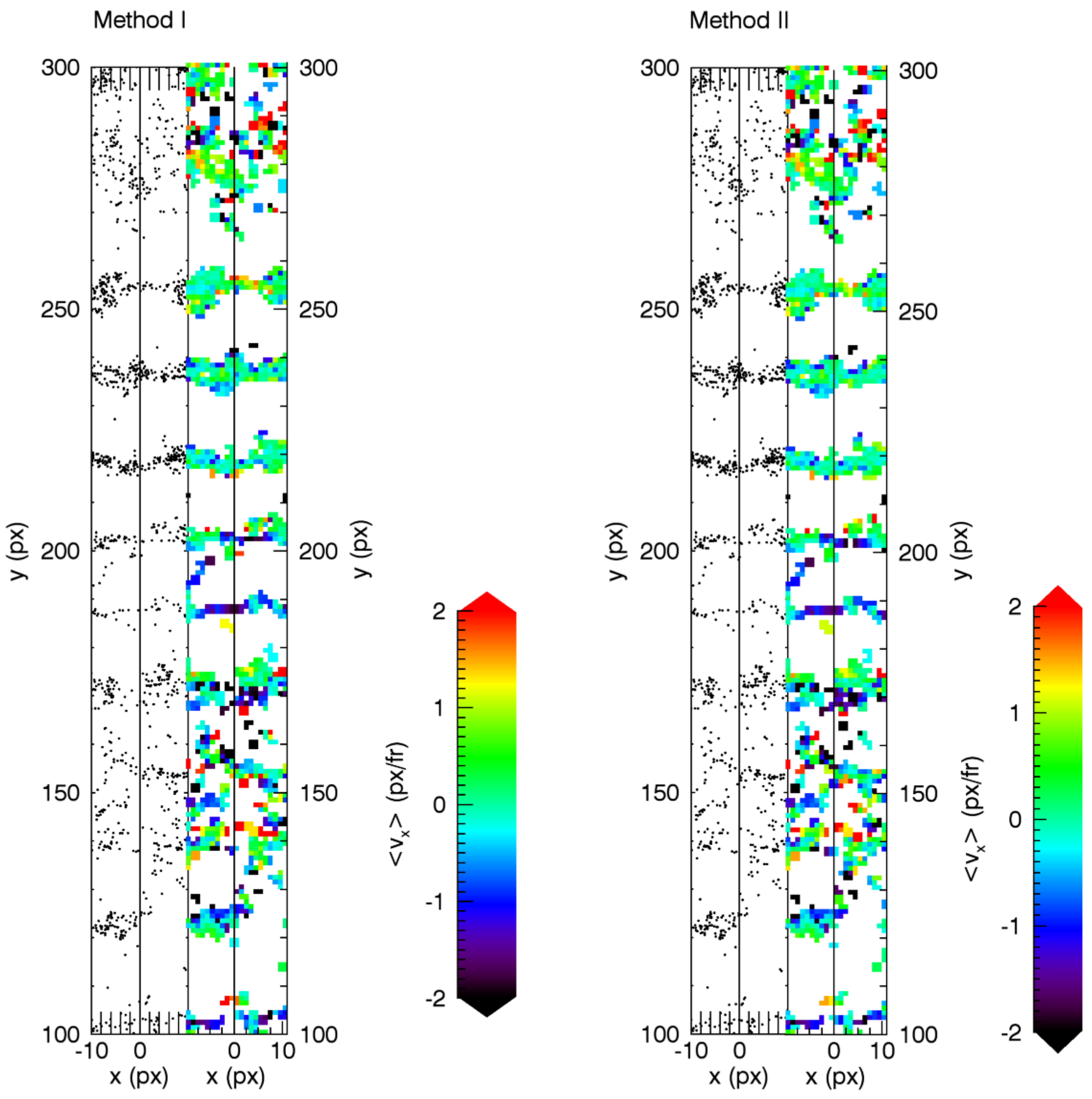
2. Image Registration Using SimpleElastix (Method I)
3. Image Registration Using Detected Particles (Method II)
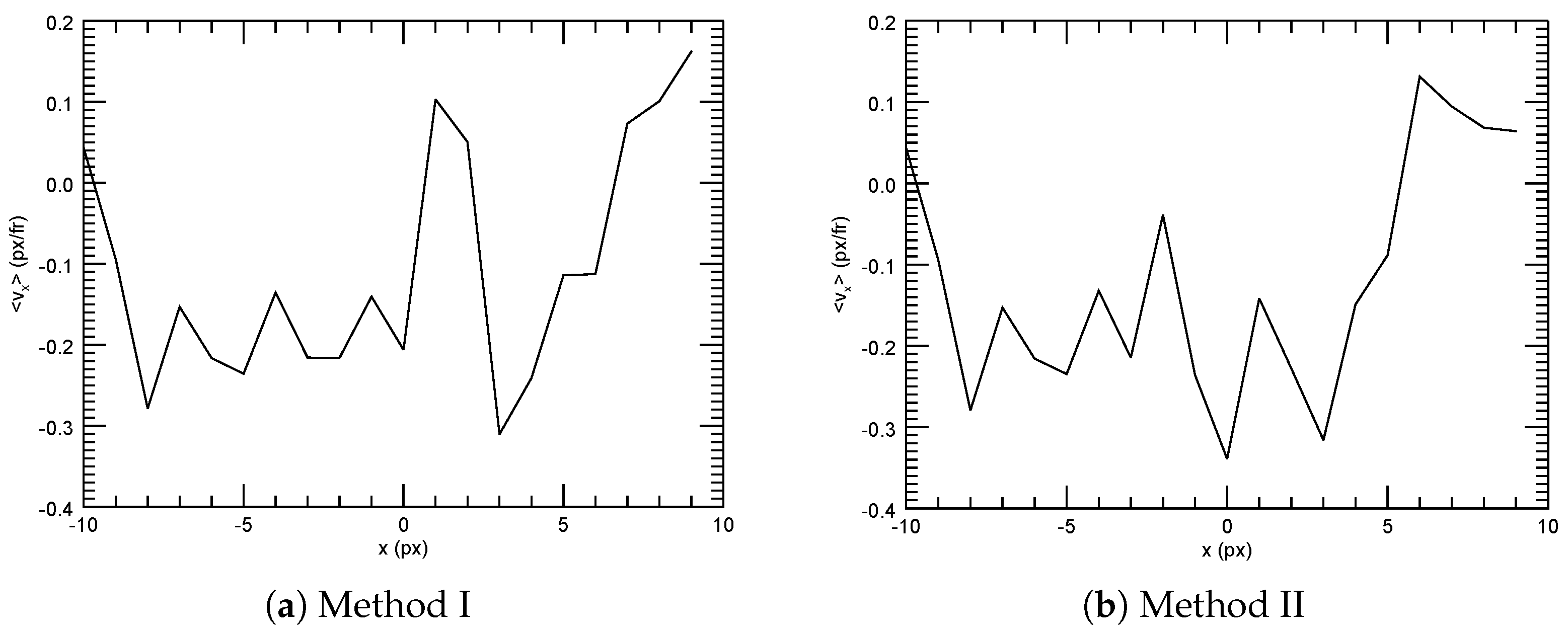
4. Results
5. Automatically Finding the Translation
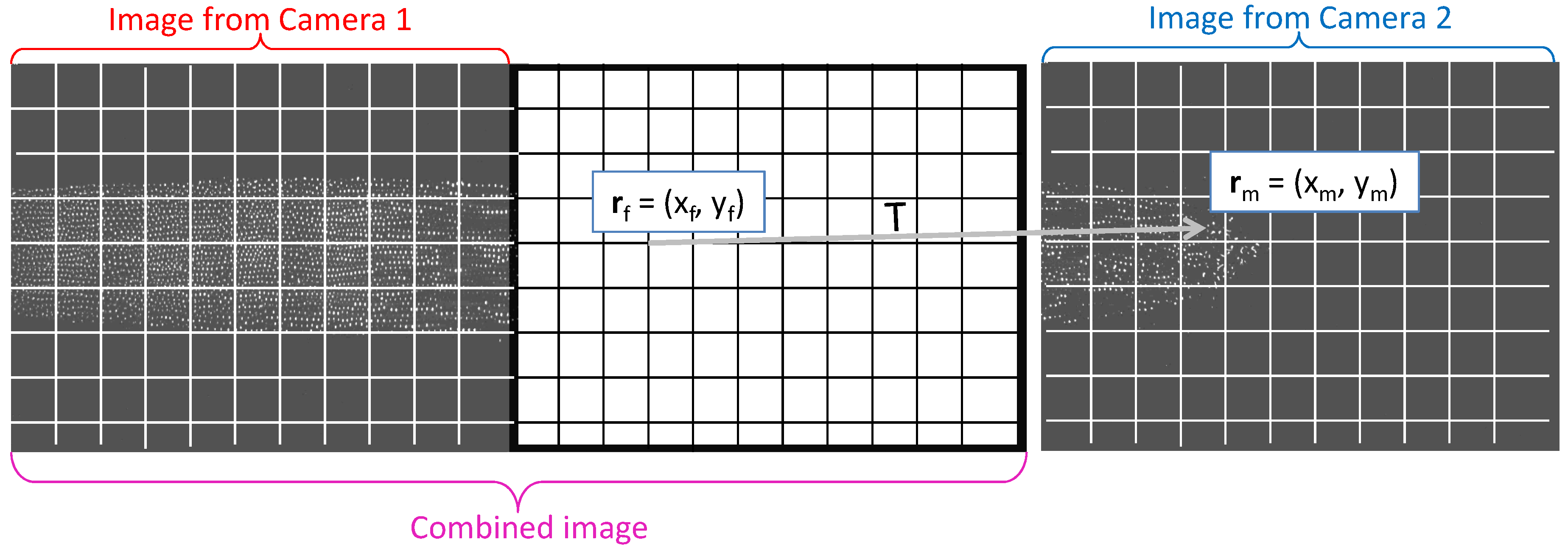
- The coordinates of particles in the overlap region that are only seen by one of the cameras have to be removed.
- The remaining coordinates belonging to the same particles have to be correctly assigned between the coordinate systems of the two cameras.
- Detection (as described in Section 2) of all particle positions and in the overlap region of all image pairs in the sequence.
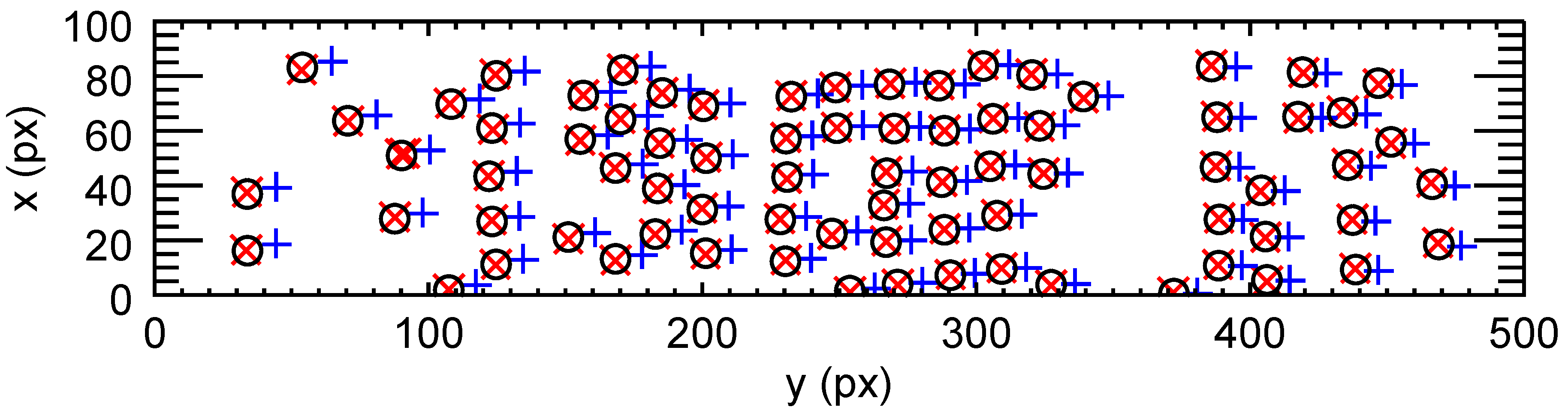
- For each image pair i in the sequence: For all points , calculate all x and y distances to each point , and .
- Determination of the “approximate translation” values, and , as the median values of the distances in all N images:
- For each image pair i: Selection of particle pairs in both images where both the x and y distance is within a certain threshold of the approximate translation (we used px):The coordinates that fulfill these conditions belong to the same particle.For our image sequence, we found
6. Conclusions
- Detect all particle positions in the overlap region for both cameras.
- Find the approximate translation as the median (over the whole sequence) of the particle distances in the image pair-wise overlap region, as described in Section 5, and use this translation to associate particles detected in Camera 1 and Camera 2 with each other. Remove coordinates where no partner was found.
- Use the particle pairs to find the exact parameters of an affine transformation by least squares fit to the transformation formula (Equation (5)).
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| DC | Direct current |
| FoV | Field of view |
| ISS | International Space Station |
| PK-4 | Plasmakristall-4 |
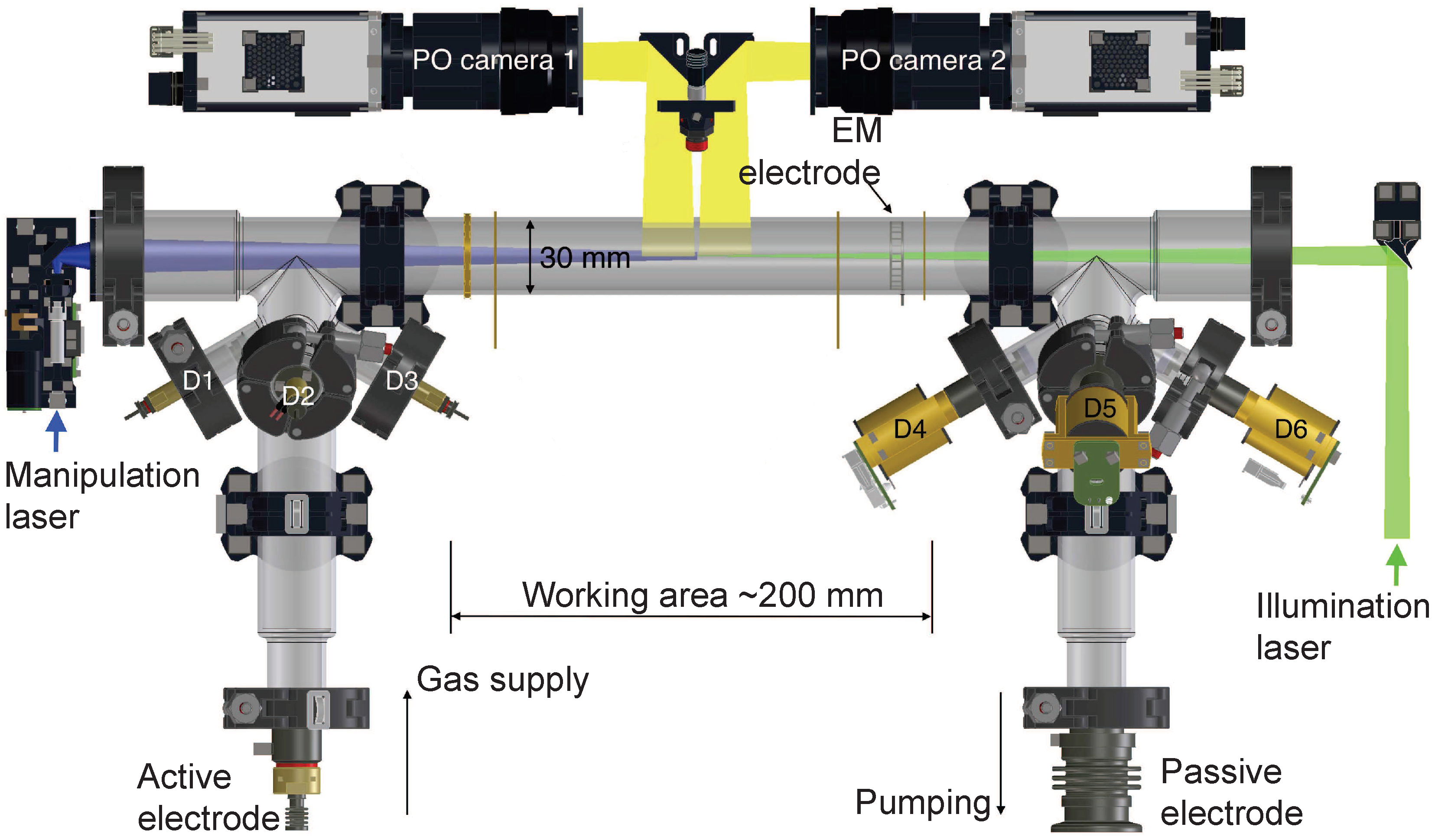
| PO camera | Particle observation camera |
References
- Pustylnik, M.Y.; Fink, M.A.; Nosenko, V.; Antonova, T.; Hagl, T.; Thomas, H.M.; Zobnin, A.V.; Lipaev, A.M.; Usachev, A.D.; Molotkov, V.I.; et al. Plasmakristall-4: New complex (dusty) plasma laboratory on board the International Space Station. Rev. Sci. Instrum. 2016, 87, 093505. [Google Scholar] [CrossRef]
- Nefedov, A.P.; Morfill, G.E.; Fortov, V.E.; Thomas, H.M.; Rothermel, H.; Hagl, T.; Ivlev, A.V.; Zuzic, M.; Klumov, B.A.; Lipaev, A.M.; et al. PKE-Nefedov: Plasma crystal experiments on the International Space Station. New J. Phys. 2003, 5, 33. [Google Scholar] [CrossRef]
- Thomas, H.M.; Morfill, G.E.; Fortov, V.E.; Ivlev, A.V.; Molotkov, V.I.; Lipaev, A.M.; Hagl, T.; Rothermel, H.; Khrapak, S.A.; Sütterlin, R.K.; et al. Complex plasma laboratory PK-3 Plus on the International Space Station. New J. Phys. 2008, 10, 033036. [Google Scholar] [CrossRef] [Green Version]
- Molotkov, V.I.; Thomas, H.M.; Lipaev, A.M.; Naumkin, V.N.; Ivlev, A.V.; Khrapak, S.A. Complex (Dusty) Plasma Research under Microgravity Conditions: PK-3 Plus Laboratory on the International Space Station. Int. J. Microgravity Sci. Appl. 2015, 32, 320302. [Google Scholar] [CrossRef]
- Khrapak, A.G.; Molotkov, V.I.; Lipaev, A.M.; Zhukhovitskii, D.I.; Naumkin, V.N.; Fortov, V.E.; Petrov, O.F.; Thomas, H.M.; Khrapak, S.A.; Huber, P.; et al. Complex Plasma Research under Microgravity Conditions: PK-3 Plus Laboratory on the International Space Station. Contrib. Plasma Phys. 2016, 56, 253–262. [Google Scholar] [CrossRef] [Green Version]
- Schwabe, M.; Du, C.R.; Huber, P.; Lipaev, A.M.; Molotkov, V.I.; Naumkin, V.N.; Zhdanov, S.K.; Zhukhovitskii, D.I.; Fortov, V.E.; Thomas, H.M. Latest Results on Complex Plasmas with the PK-3 Plus Laboratory on board the International Space Station. Microgravity Sci. Technol. 2018. [Google Scholar] [CrossRef]
- Morfill, G.E.; Ivlev, A.V. Complex plasmas: An interdisciplinary research field. Rev. Mod. Phys. 2009, 81, 1353. [Google Scholar] [CrossRef]
- Zuzic, M.; Ivlev, A.; Goree, J.; Morfill, G.E.; Thomas, H.M.; Rothermel, H.; Konopka, U.; Sütterlin, R.; Goldbeck, D.D. Three-Dimensional Strongly Coupled Plasma Crystal under Gravity Conditions. Phys. Rev. Lett. 2000, 85, 4065. [Google Scholar] [CrossRef]
- Rubin-Zuzic, M.; Morfill, G.E.; Thomas, H.M.; Ivlev, A.V.; Klumov, B.A.; Rothermel, H.; Bunk, W.; Pompl, R.; Havnes, O.; Fouquét, A. Kinetic development of crystallisation fronts in complex plasmas. Nat. Phys. 2006, 2, 181. [Google Scholar] [CrossRef]
- Huber, P. Untersuchung von 3-D Plasmakristallen. Ph.D. Thesis, Ludwig-Maximilians-Universität München, München, Germany, 2011. [Google Scholar]
- Flanagan, T.M.; Goree, J. Observation of the spatial growth of self-excited dust-density waves. Phys. Plasmas 2010, 17, 123702. [Google Scholar] [CrossRef]
- Melzer, A. Connecting the wakefield instabilities in dusty plasmas. Phys. Rev. E 2014, 90, 053103. [Google Scholar] [CrossRef] [PubMed]
- Kompaneets, R.; Morfill, G.E.; Ivlev, A.V. Wakes in complex plasmas: A self-consistent kinetic theory. Phys. Rev. E 2016, 93, 063201. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Goree, J.; Pustylnik, M.Y.; Thomas, H.M.; Fortov, V.E.; Lipaev, A.M.; Usachev, A.D.; Molotkov, V.I.; Petrov, O.F.; Thoma, M.H. Particle velocity distribution in a three-dimensional dusty plasma under microgravity conditions. AIP Conf. Proc. 2018. [Google Scholar] [CrossRef]
- Zhukhovitskii, D.I.; Fortov, V.E.; Molotkov, V.I.; Lipaev, A.M.; Naumkin, V.N.; Thomas, H.M.; Ivlev, A.V.; Schwabe, M.; Morfill, G.E. Measurement of the speed of sound by observation of the Mach cones in a complex plasma under microgravity conditions. Phys. Plasmas 2015, 22, 023701. [Google Scholar] [CrossRef] [Green Version]
- Zaehringer, E.; Schwabe, M.; Zhdanov, S.; Mohr, D.P.; Knapek, C.A.; Huber, P.; Semenov, I.L.; Thomas, H.M. Interaction of a supersonic particle with a three-dimensional complex plasma. Phys. Plasmas 2018, 25, 033703. [Google Scholar] [CrossRef] [Green Version]
- Schwabe, M.; Zhdanov, S.; Räth, C. Instability onset and scaling laws of an autooscillating turbulent flow in a complex (dusty) plasma. Phys. Rev. E 2017, 95, 041201(R). [Google Scholar] [CrossRef] [PubMed]
- Killer, C.; Himpel, M.; Melzer, A.; Bockwoldt, T.; Menzel, K.O.; Piel, A. Oscillation Amplitudes in 3-D Dust Density Waves in Dusty Plasmas Under Microgravity Conditions. IEEE Trans. Plasma Sci. 2014, 42, 2680–2681. [Google Scholar] [CrossRef]
- Himpel, M.; Bockwoldt, T.; Killer, C.; Menzel, K.O.; Piel, A.; Melzer, A. Stereoscopy of dust density waves under microgravity: Velocity distributions and phase-resolved single-particle analysis. Phys. Plasmas 2014, 21, 033703. [Google Scholar] [CrossRef]
- Kretschmer, M.; Antonova, T.; Zhdanov, S.; Thoma, M. Wave Phenomena in a Stratified Complex Plasma. IEEE Trans. Plasma Sci. 2016, 44, 458. [Google Scholar] [CrossRef]
- Yang, L.; Schwabe, M.; Zhdanov, S.; Thomas, H.M.; Lipaev, A.M.; Molotkov, V.I.; Fortov, V.E.; Zhang, J.; Du, C.R. Density waves at the interface of a binary complex plasma. EPL 2017, 117, 25001. [Google Scholar] [CrossRef] [Green Version]
- Dietz, C.; Kretschmer, M.; Steinmüller, B.; Thoma, M.H. Recent microgravity experiments with complex direct current plasmas. Contrib. Plasma Phys. 2017. [Google Scholar] [CrossRef]
- Zhukhovitskii, D.I. Driving force for a nonequilibrium phase transition in three-dimensional complex plasmas. Phys. Plasmas 2017, 24. [Google Scholar] [CrossRef]
- Killer, C.; Bockwoldt, T.; Schütt, S.; Himpel, M.; Melzer, A.; Piel, A. Phase Separation of Binary Charged Particle Systems with Small Size Disparities using a Dusty Plasma. Phys. Rev. Lett. 2016, 116, 115002. [Google Scholar] [CrossRef] [PubMed]
- Knapek, C.A.; Huber, P.; Mohr, D.P.; Zaehringer, E.; Molotkov, V.I.; Lipaev, A.M.; Naumkin, V.; Konopka, U.; Thomas, H.M.; Fortov, V.E. Ekoplasma—Experiments with grid electrodes in microgravity. AIP Conf. Proc. 2018, 1925, 0200004. [Google Scholar] [CrossRef]
- Khrapak, S.A.; Klumov, B.A.; Huber, P.; Molotkov, V.I.; Lipaev, A.M.; Naumkin, V.N.; Ivlev, A.V.; Thomas, H.M.; Schwabe, M.; Morfill, G.E.; et al. Fluid-solid phase transitions in three-dimensional complex plasmas under microgravity conditions. Phys. Rev. E 2012, 85, 066407. [Google Scholar] [CrossRef] [Green Version]
- Schwabe, M.; Zhdanov, S.K.; Hagl, T.; Huber, P.; Lipaev, A.M.; Molotkov, V.I.; Naumkin, V.; Rubin-Zuzic, M.; Vinogradov, P.V.; Zaehringer, E.; et al. Observation of metallic sphere—Complex plasma interactions in microgravity. New J. Phys. 2017, 19, 103019. [Google Scholar] [CrossRef]
- Zitová, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef]
- Goshtasby, A.A. 2-D and 3-D Image Registration for Medical, Remote Sensing, and Industrial Applications; John Wiley and Sons, Inc.: New York, NY, USA, 2005. [Google Scholar]
- Shamonin, D.; Bron, E.E.; Lelieveldt, B.P.F.; Smits, M.; Klein, S.; Staring, M. Fast parallel image registration on CPU and GPU for diagnostic classification of Alzheimer’s disease. Front. Neuroinform. 2014, 7, 50. [Google Scholar] [CrossRef]
- Marstal, K.; Berendsen, F.; Staring, M.; Klein, S. SimpleElastix: A user-friendly, multi-lingual library for medical image registration. In Proceedings of the International Workshop on Biomedical Image Registration (WBIR), Las Vegas, NV, USA, 1 July 2016. [Google Scholar]
- SimpleElastix. Available online: https://simpleelastix.github.io/ (accessed on 13 June 2018).
- National Library of Medicine. Available online: http://www.simpleitk.org/ (accessed on 13 June 2018).
- Klein, S.; Staring, M.; Murphy, K.; Viergever, M.; Pluim, J. elastix: A Toolbox for Intensity-Based Medical Image Registration. IEEE Trans. Med. Imaging 2010, 29, 196–205. [Google Scholar] [CrossRef]
- Klein, S.; Staring, M. Available online: http://elastix.isi.uu.nl/ (accessed on 13 June 2018).
- Schwabe, M.; Laut, I.; Zhdanov, S.K.; Khrapak, S.; Lipaev, A.M.; Molotkov, V.I.; Pustylnik, M.Y.; Räth, C.; Usachev, A.D.; Thomas, H. String fluid dynamics observed using a complex plasma under microgravity conditions. 2018; under preparation. [Google Scholar]
- Feng, Y.; Goree, J.; Liu, B. Accurate particle position measurement from images. Rev. Sci. Instrum. 2007, 78, 053704. [Google Scholar] [CrossRef] [Green Version]
- Markwardt, C.B. Non-Linear Least Squares Fitting in IDL with MPFIT. In ASP Conference Series, Proceedings of the Astronomical Data Analysis Software and Systems XVIII, Quebec, QC, Canada, 2–5 November 2008; Bohlender, D., Patric, D., Durand, D., Eds.; NASA: Greenbelt, MD, USA, 2008; Volume XXX, pp. 251–254. [Google Scholar]
- Korolev, V.V.; Bezborodov, M.A.; Kovalenko, I.G.; Zankovich, A.M.; Eremin, M.A. Tricolor Technique for Visualization of Spatial Variations of Polydisperse Dust in Gas-Dust Flows. J. Imaging 2018, 4, 61. [Google Scholar] [CrossRef]
- Inglada, J.; Muron, V.; Pichard, D.; Feuvrier, T. Analysis of Artifacts in Subpixel Remote Sensing Image Registration. IEEE Trans. Geosci. Remote Sens. 2007, 45, 254–264. [Google Scholar] [CrossRef] [Green Version]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schwabe, M.; Rubin-Zuzic, M.; Räth, C.; Pustylnik, M. Image Registration with Particles, Examplified with the Complex Plasma Laboratory PK-4 on Board the International Space Station. J. Imaging 2019, 5, 39. https://0-doi-org.brum.beds.ac.uk/10.3390/jimaging5030039
Schwabe M, Rubin-Zuzic M, Räth C, Pustylnik M. Image Registration with Particles, Examplified with the Complex Plasma Laboratory PK-4 on Board the International Space Station. Journal of Imaging. 2019; 5(3):39. https://0-doi-org.brum.beds.ac.uk/10.3390/jimaging5030039
Chicago/Turabian StyleSchwabe, Mierk, Milenko Rubin-Zuzic, Christoph Räth, and Mikhail Pustylnik. 2019. "Image Registration with Particles, Examplified with the Complex Plasma Laboratory PK-4 on Board the International Space Station" Journal of Imaging 5, no. 3: 39. https://0-doi-org.brum.beds.ac.uk/10.3390/jimaging5030039