
Rescheduling Strategy for Berth Planning in Container Terminals: An Empirical Study from Korea


Abstract
:1. Introduction
2. Literature Review
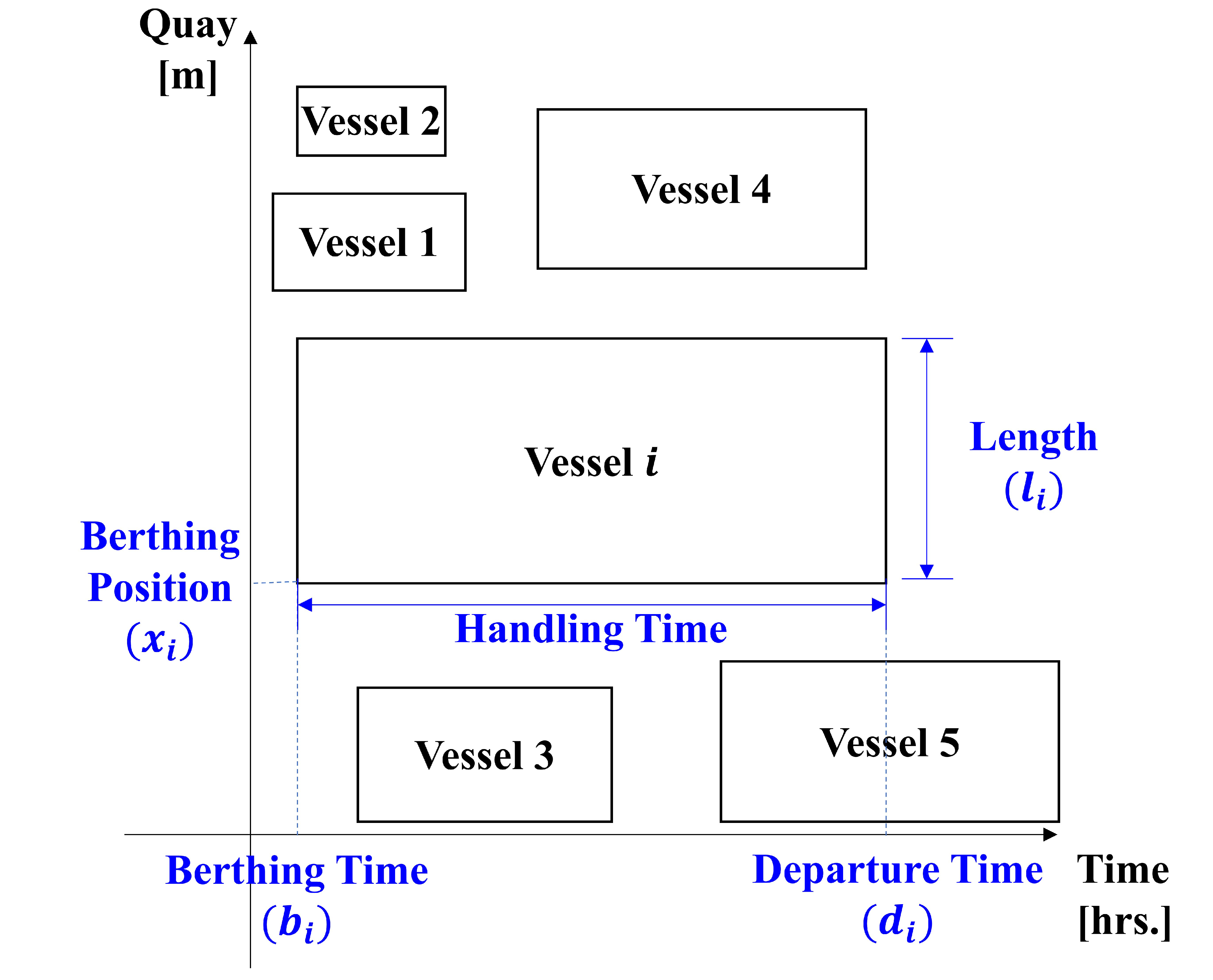
3. Problem Description
3.1. Assumption
- Quay layout is assumed as a continuous space.
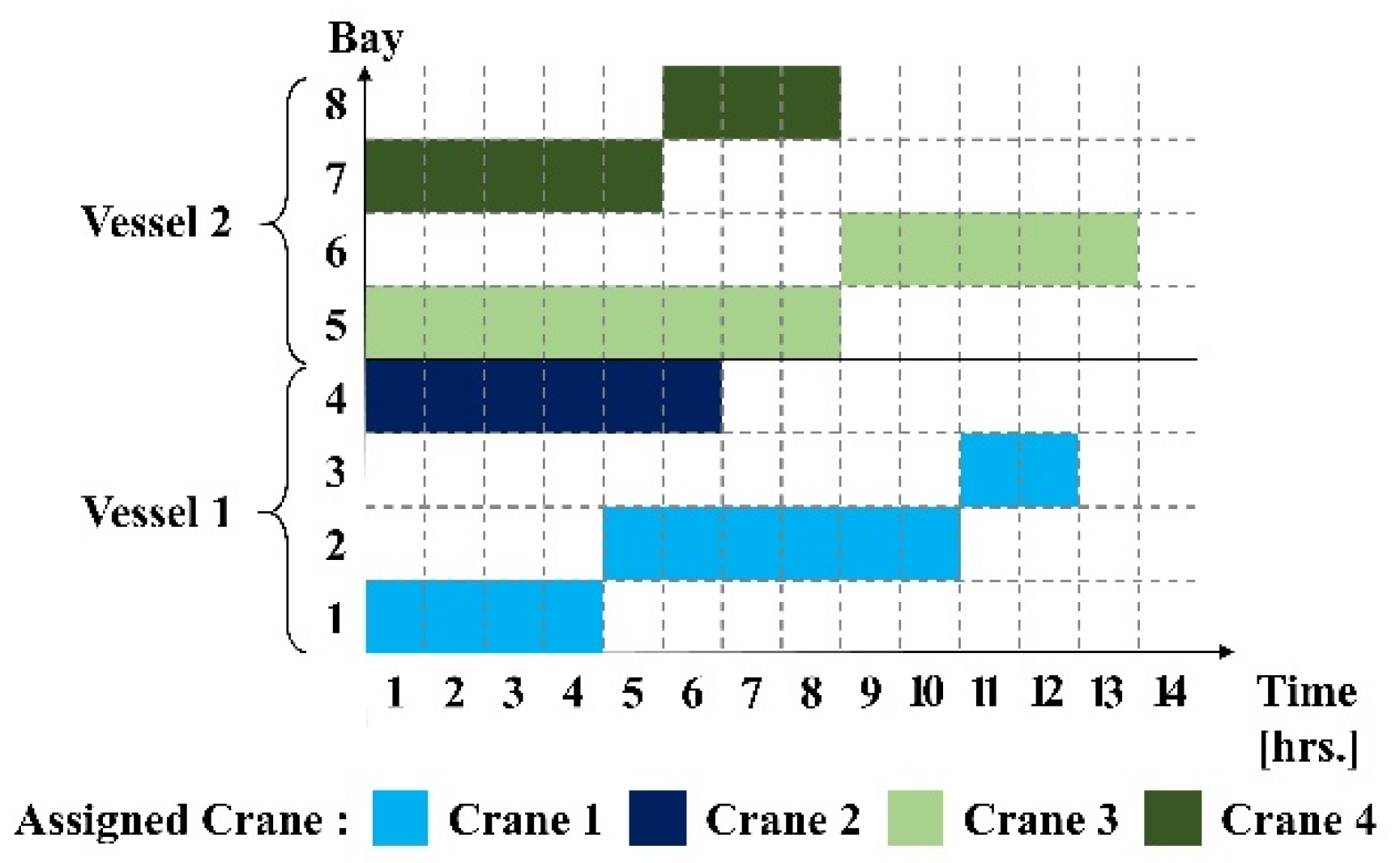
- Each vessel has a maximum and minimum number of QCs that can be assigned. It is decided in advance through an agreement between the terminal and the shipping company to ensure minimum productivity. For some feeder vessels, if the minimum number of QCs is not given, one is assumed.
- When vessels berth and departure at the terminal, tugboat and pilot schedule between seaport to inland ports and line handling take an hour. That is, it is ensured a minimum of 2 h between vessels.
- QCs have constant productivity and start the loading/discharging process the moment the vessel is berthed.
- The number of QCs working on the vessel may change during loading/discharging operation. However, the minimum number of QCs that can be assigned must be met to ensure continuous work. Namely, it is assumed that the vessel which has started operation will not be stopped.
3.2. Notation
3.2.1. Parameters
| Set of vessels to be scheduled at time , | |
| Subset of vessels which are berthed or have not yet departed the port at time | |
| Subset of vessels which are not yet berthed at time | |
| Length of planning period (unit: an hour) | |
| Total length of quay | |
| Total number of QCs | |
| Minimum number of QCs that can be assigned per hour to vessel | |
| Maximum number of QCs that can be assigned per hour to vessel | |
| Possible number of QCs assigned to vessel at a particular point in time () | |
| The most recently updated arrival time of vessel | |
| Departure time of vessel in proforma schedule | |
| Determined berthing time of specific vessel in | |
| Determined berthing position of specific vessel in | |
| Length of vessel | |
| Total number of containers to be discharged or loaded for vessel | |
| Remained number of containers to be discharged or loaded for specific vessel in at time | |
| Productivity of one QC | |
| Total number of QCs required for vessel , | |
| Remained number of QCs required for specific vessel in at time , | |
| Minimum time interval needed between vessels | |
| Minimum distance needed between vessels | |
| Penalty cost corresponding to the departure delay of vessel | |
| A large number |
3.2.2. Decision Variables
| Berthing time of vessel | |
| Departure time of vessel | |
| Berthing position of vessel | |
| 1 if vessel is completely on the left side of vessel on x-axis (time) in the time-space diagram, 0 otherwise (where ) | |
| 1 if vessel is completely below vessel on y-axis (space) in the time-space diagram, 0 otherwise (where ) | |
| 1 if QCs are assigned to vessel at time , 0 otherwise |
3.3. Model Formulation
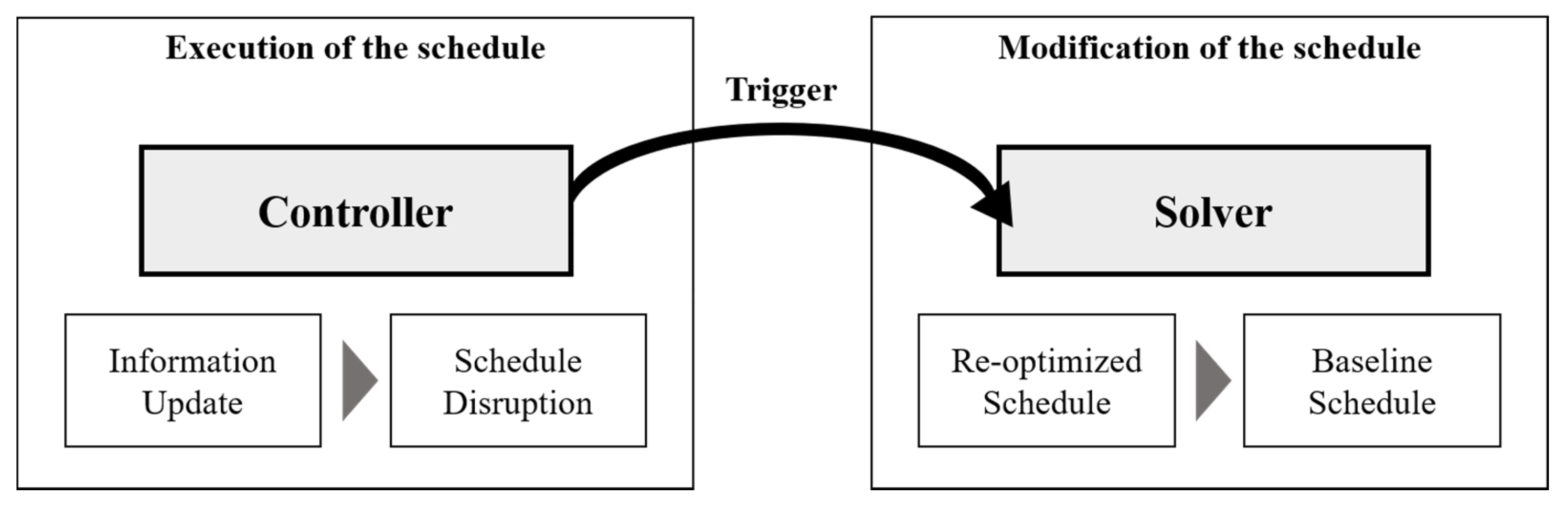
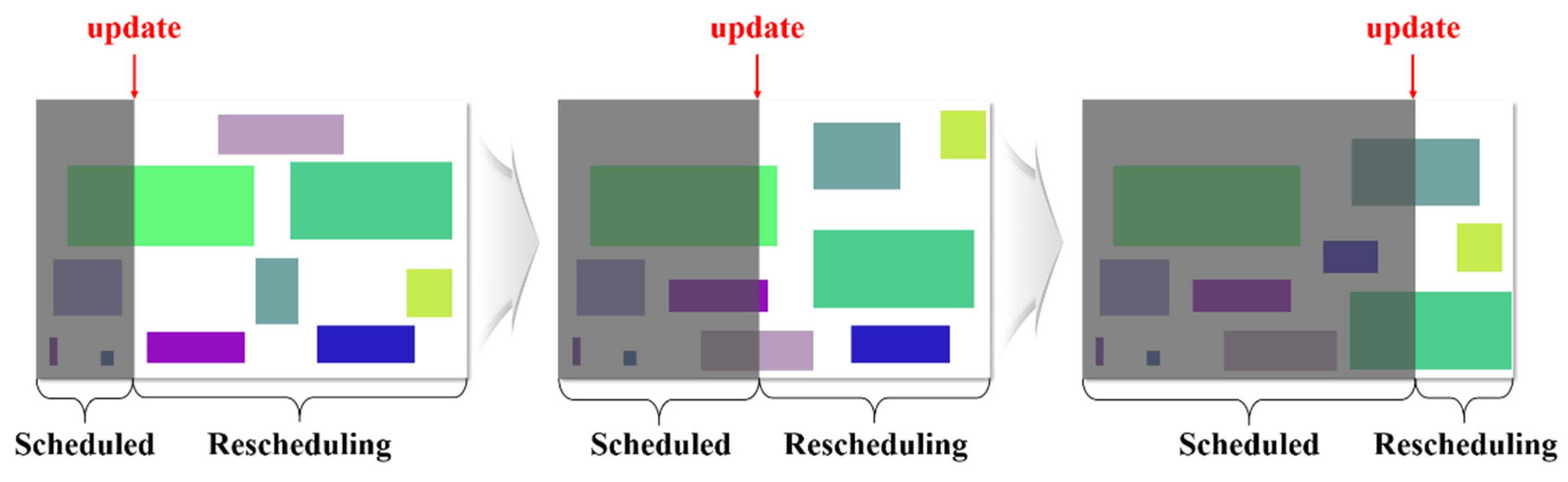
4. Solution Approach
5. Numerical Experiments
5.1. Experiment Environment
5.2. Experiment Scenarios
5.3. Result of Experiments under Three Scenarios
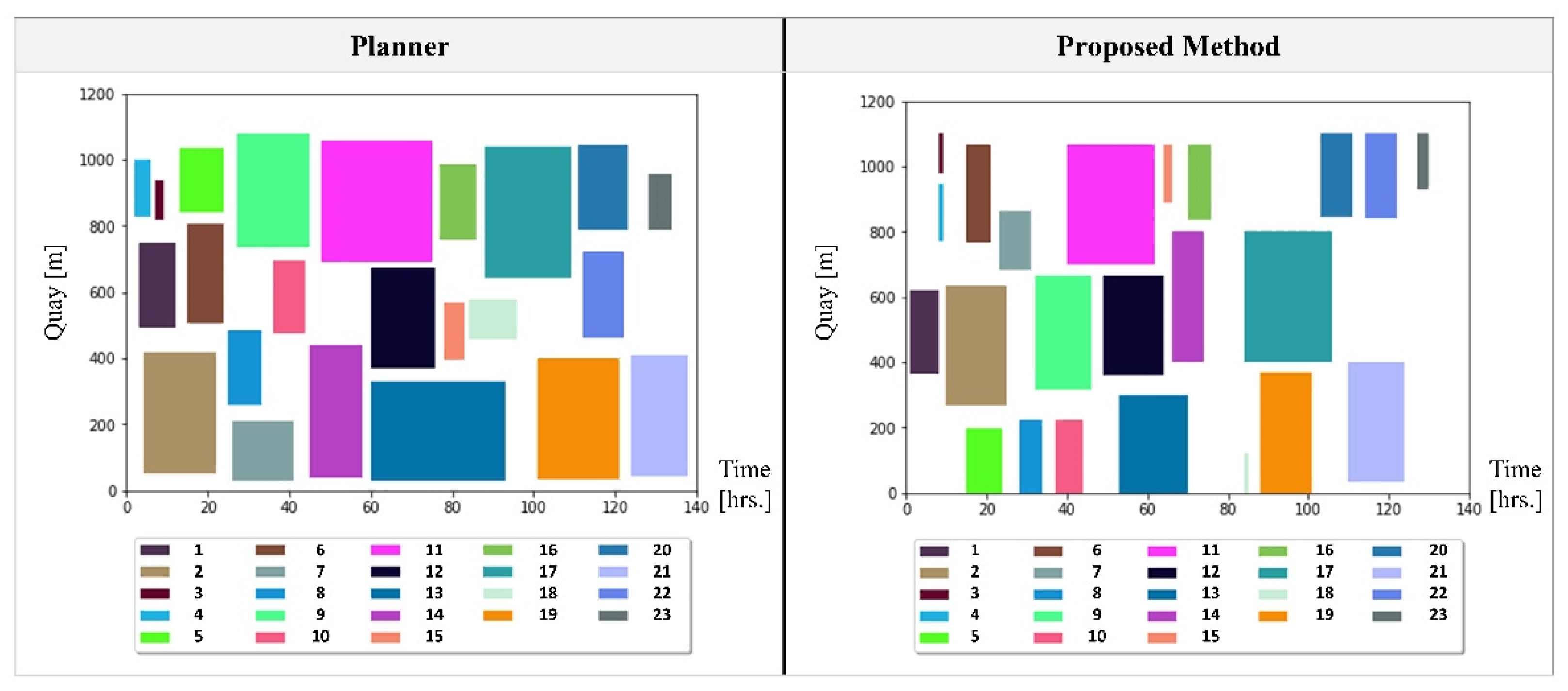
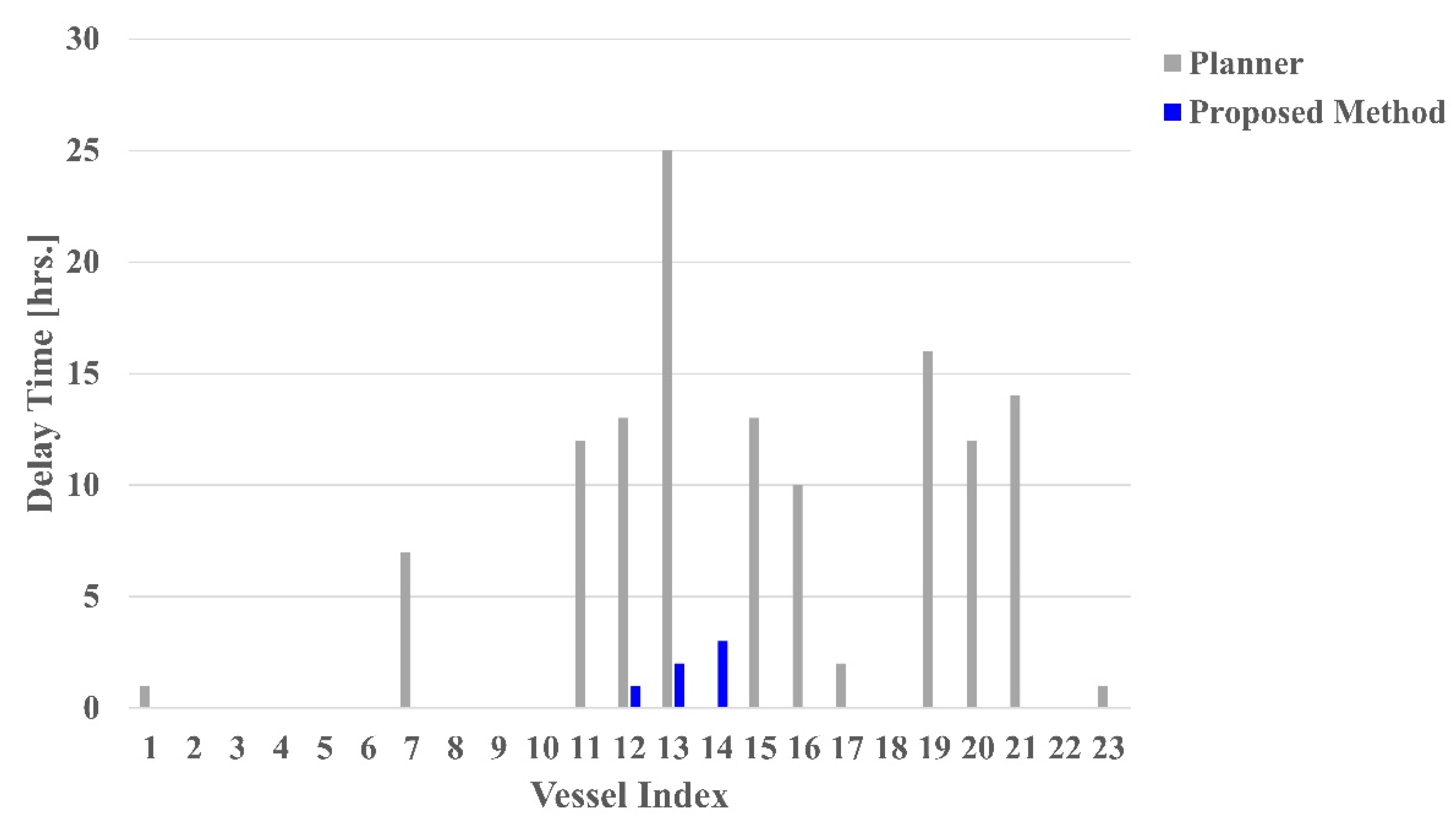
5.3.1. Scenario 1: A Case Where Vessels Can Berth after Their ATA
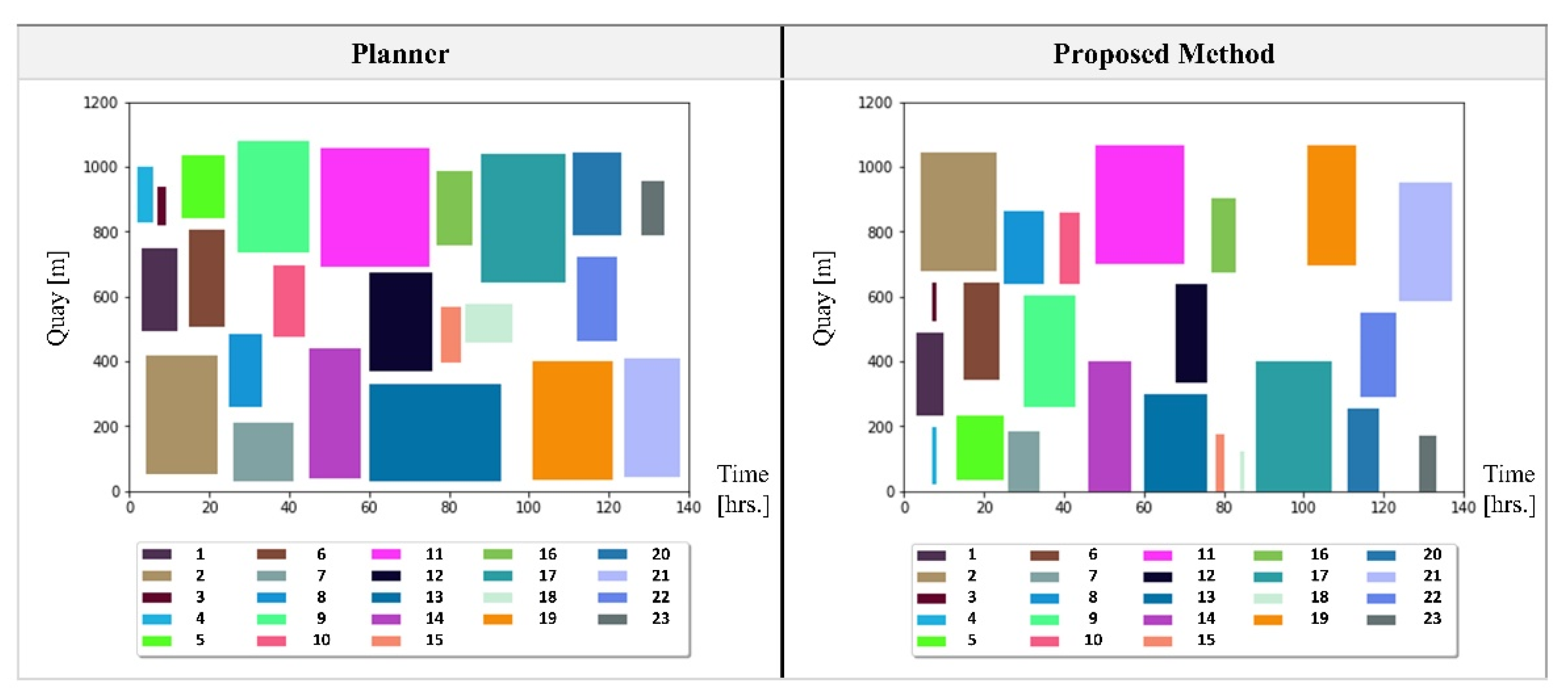
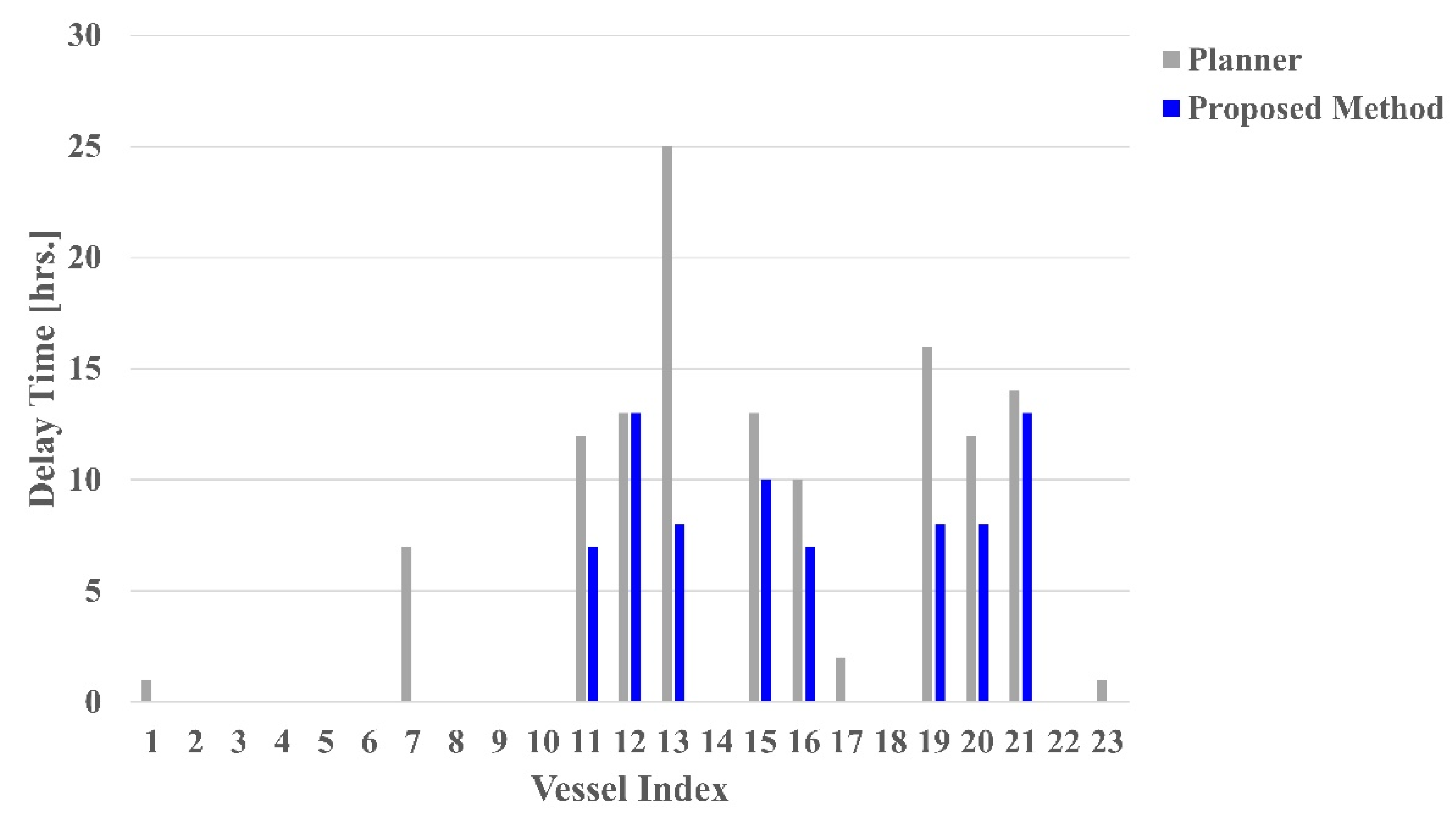
5.3.2. Scenario 2: A Case Where Vessels Can Berth after Their ATB
5.3.3. Scenario 3: A Case Where Productivity of QCs Is Reduced
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, M.Z.; Jin, J.G.; Lu, C.X. Real-time disruption recovery for integrated berth allocation and crane assignment in container terminals. Transp. Res. Rec. 2015, 2479, 49–59. [Google Scholar] [CrossRef] [Green Version]
- Moorthy, R.; Teo, C.P. Berth management in container terminal: The template design problem. OR Spectr. 2006, 28, 495–518. [Google Scholar] [CrossRef]
- Yu, J.; Tang, G.; Song, X.; Yu, X.; Qi, Y.; Li, D.; Zhang, Y. Ship arrival prediction and its value on daily container terminal operation. Ocean. Eng. 2018, 157, 73–86. [Google Scholar] [CrossRef]
- Kim, K.H.; Park, Y.M. A Crane Scheduling Method for Port Container Terminals. Eur. J. Oper. Res. 2004, 156, 752–768. [Google Scholar] [CrossRef]
- Notteboom, T.E. The time factor in liner shipping services. Marit. Econ. Logist. 2006, 8, 19–39. [Google Scholar] [CrossRef]
- Sanchez, R.J.; Hoffmann, J.; Micco, A.; Pizzolitto, G.V.; Sgut, M.; Wilmsmeier, G. Port efficiency and international trade: Port efficiency as a determinant of maritime transport costs. Marit. Econ. Logist. 2003, 5, 199–218. [Google Scholar] [CrossRef]
- Notteboom, T.; Rodrigue, J.P. Containerisation, box logistics and global supply chains: The integration of ports and liner shipping networks. Marit. Econ. Logist. 2008, 10, 152–174. [Google Scholar] [CrossRef]
- Acciaro, M. A critical review of port pricing literature: What role for academic research? Asian J. Shipp. Logist. 2013, 29, 207–228. [Google Scholar] [CrossRef] [Green Version]
- Notteboom, T.; Pallis, T.; Rodrigue, J.P. Disruptions and resilience in global container shipping and ports: The COVID-19 pandemic versus the 2008–2009 financial crisis. Marit. Econ. Logist. 2021, 1, 1–32. [Google Scholar]
- Stahlbock, R.; Voß, S. Operations research at container terminals: A literature update. OR Spectr. 2008, 30, 1–52. [Google Scholar] [CrossRef]
- Carlo, H.J.; Vis, I.F.; Roodbergen, K.J. Storage yard operations in container terminals: Literature overview, trends, and research directions. Eur. J. Oper. Res. 2014, 235, 412–430. [Google Scholar] [CrossRef]
- Vis, I.F. Survey of research in the design and control of automated guided vehicle systems. Eur. J. Oper. Res. 2006, 170, 677–709. [Google Scholar] [CrossRef]
- Vis, I.F.; De Koster, R. Transshipment of containers at a container terminal: An overview. Eur. J. Oper. Res. 2003, 147, 1–16. [Google Scholar] [CrossRef]
- Monios, J.; Wilmsmeier, G.; Ng, A.K. Port system evolution—The emergence of second-tier hubs. Marit. Policy Manag. 2019, 46, 61–73. [Google Scholar] [CrossRef]
- Martin, J.; Thomas, B.J. The container terminal community. Marit. Policy Manag. 2001, 28, 279–292. [Google Scholar] [CrossRef]
- Lai, K.K.; Shih, K. A Study of Container Berth Allocation. J. Adv. Transp. 1992, 26, 45–60. [Google Scholar] [CrossRef]
- Imai, A.; Nagaiwa, K.I.; Tat, C.W. Efficient Planning of Berth Allocation for Container Terminals in Asia. J. Adv. Transp. 1997, 31, 75–94. [Google Scholar] [CrossRef]
- Kim, K.H.; Moon, K.C. Berth Scheduling by Simulated Annealing. Transp. Res. Part B Methodol. 2003, 37, 541–560. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A Survey of Berth Allocation and Quay Crane Scheduling Problems in Container Terminals. Eur. J. Oper. Res. 2010, 202, 615–627. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A Follow-up Survey of Berth Allocation and Quay Crane Scheduling Problems in Container Terminals. Eur. J. Oper. Res. 2015, 244, 675–689. [Google Scholar] [CrossRef]
- Imai, A.; Nishimura, E.; Papadimitriou, S. The Dynamic Berth Allocation Problem for a Container Port. Transp. Res. Part. B Methodol. 2001, 35, 401–417. [Google Scholar] [CrossRef]
- Guan, Y.; Cheung, R.K. The Berth Allocation Problem: Models and Solution Methods. OR Spectr. 2004, 26, 75–92. [Google Scholar] [CrossRef]
- Imai, A.; Nishimura, E.; Hattori, M.; Papadimitriou, S. Berth Allocation at Indented Berths for Mega-containerships. Eur. J. Oper. Res. 2007, 179, 579–593. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Lim, A. A Stochastic Beam Search for the Berth Allocation Problem. Decis. Support Syst. 2007, 42, 2186–2196. [Google Scholar] [CrossRef]
- Ting, C.J.; Wu, K.C.; Chou, H. Particle Swarm Optimization Algorithm for the Berth Allocation Problem. Expert Syst. Appl. 2014, 41, 1543–1550. [Google Scholar] [CrossRef]
- Guan, Y.; Xiao, W.Q.; Cheung, R.K.; Li, C.L. A Multiprocessor Task Scheduling Model for berth Allocation: Heuristic and Worst-case Analysis. Oper. Res. Lett. 2002, 30, 343–350. [Google Scholar] [CrossRef]
- Park, Y.M.; Kim, K.H. A scheduling method for Berth and Quay cranes. OR Spectr. 2003, 25, 1–23. [Google Scholar] [CrossRef]
- Vacca, I.; Salani, M.; Bierlaire, M. An exact algorithm for the integrated planning of berth allocation and quay crane assignment. Transp. Sci. 2013, 47, 148–161. [Google Scholar] [CrossRef] [Green Version]
- Meisel, F.; Bierwirth, C. Heuristics for the Integration of Crane Productivity in the Berth Allocation Problem. Transp. Res. Part E: Logist. Transp. Rev. 2009, 45, 196–209. [Google Scholar] [CrossRef]
- Iris, Ç.; Pacino, D.; Ropke, S.; Larsen, A. Integrated berth allocation and quay crane assignment problem: Set partitioning models and computational results. Transp. Res. Part E Logist. Transp. Rev. 2015, 81, 75–97. [Google Scholar] [CrossRef] [Green Version]
- Iris, Ç.; Pacino, D.; Ropke, S. Improved Formulations and an Adaptive Large Neighborhood Search Heuristic for the Integrated Berth Allocation and Quay Crane Assignment Problem. Transp. Res. Part E Logist. Transp. Rev. 2017, 105, 123–147. [Google Scholar] [CrossRef]
- Zhou, P.F.; Kang, H.G. Study on Berth and Quay-crane Allocation under Stochastic Environments in Container Terminal. Syst. Eng. Theory Pract. 2008, 28, 161–169. [Google Scholar] [CrossRef]
- Zhen, L.; Lee, L.H.; Chew, E.P. A decision model for berth allocation under uncertainty. Eur. J. Oper. Res. 2011, 212, 54–68. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Q.; Quan, X. Robust berth scheduling with uncertain vessel delay and handling time. Ann. Oper. Res. 2012, 192, 123–140. [Google Scholar] [CrossRef]
- Zhen, L. Tactical berth allocation under uncertainty. Eur. J. Oper. Res. 2015, 247, 928–944. [Google Scholar] [CrossRef]
- Iris, Ç.; Lam, J.S.L. Recoverable robustness in weekly berth and quay crane planning. Transp. Res. Part B Methodol. 2019, 122, 365–389. [Google Scholar] [CrossRef]
- Zeng, Q.; Yang, Z.; Hu, X. Disruption Recovery Model for Berth and Quay Crane Scheduling in Container Terminals. Eng. Optim. 2011, 43, 967–983. [Google Scholar] [CrossRef]
- Umang, N.; Bierlaire, M.; Erera, A.L. Real-time management of berth allocation with stochastic arrival and handling times. J. Sched. 2017, 20, 67–83. [Google Scholar] [CrossRef] [Green Version]
- Xiang, X.; Liu, C.; Miao, L. Reactive strategy for discrete berth allocation and quay crane assignment problems under uncertainty. Comput. Ind. Eng. 2018, 126, 196–216. [Google Scholar] [CrossRef]
- Lv, X.; Jin, J.G.; Hu, H. Berth allocation recovery for container transshipment terminals. Marit. Policy Manag. 2020, 47, 558–574. [Google Scholar] [CrossRef]
- Cho, S.W.; Park, H.J.; Lee, C. An integrated method for berth allocation and quay crane assignment to allow for reassignment of vessels to other terminals. Marit. Econ. Logist. 2021, 23, 123–153. [Google Scholar] [CrossRef]
- Iris, Ç.; Lam, J.S.L. Optimal energy management and operations planning in seaports with smart grid while harnessing renewable energy under uncertainty. Omega 2021, 102445. [Google Scholar] [CrossRef]
- Iris, Ç.; Lam, J.S.L. A review of energy efficiency in ports: Operational strategies, technologies and energy management systems. Renew. Sustain. Energy Rev. 2019, 112, 170–182. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario 1 | |
| Scenario 2 | |
| Scenario 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, A.; Park, H.-J.; Park, J.-H.; Cho, S.-W. Rescheduling Strategy for Berth Planning in Container Terminals: An Empirical Study from Korea. J. Mar. Sci. Eng. 2021, 9, 527. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9050527
Kim A, Park H-J, Park J-H, Cho S-W. Rescheduling Strategy for Berth Planning in Container Terminals: An Empirical Study from Korea. Journal of Marine Science and Engineering. 2021; 9(5):527. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9050527
Chicago/Turabian StyleKim, Armi, Hyun-Ji Park, Jin-Hyoung Park, and Sung-Won Cho. 2021. "Rescheduling Strategy for Berth Planning in Container Terminals: An Empirical Study from Korea" Journal of Marine Science and Engineering 9, no. 5: 527. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9050527