
A Novel Deep Learning-Based State-of-Charge Estimation for Renewable Energy Management System in Hybrid Electric Vehicles


Abstract
:1. Introduction
- Development of a novel DLSOC-REM technique for the SOC estimation in HEVs.
- Aims to design a new HCNN-LSTM model for the prediction of SOC estimation and proper management of renewable energy.
- Employs the BMO for the hyperparameter tuning of the HCNN-LSTM model and thereby improves the prediction performance.
- Validate the performance of the DLSOC-REM technique using different drive cycles and inspect the results under several aspects.
2. Literature Review
3. The Proposed SOC Estimation Model
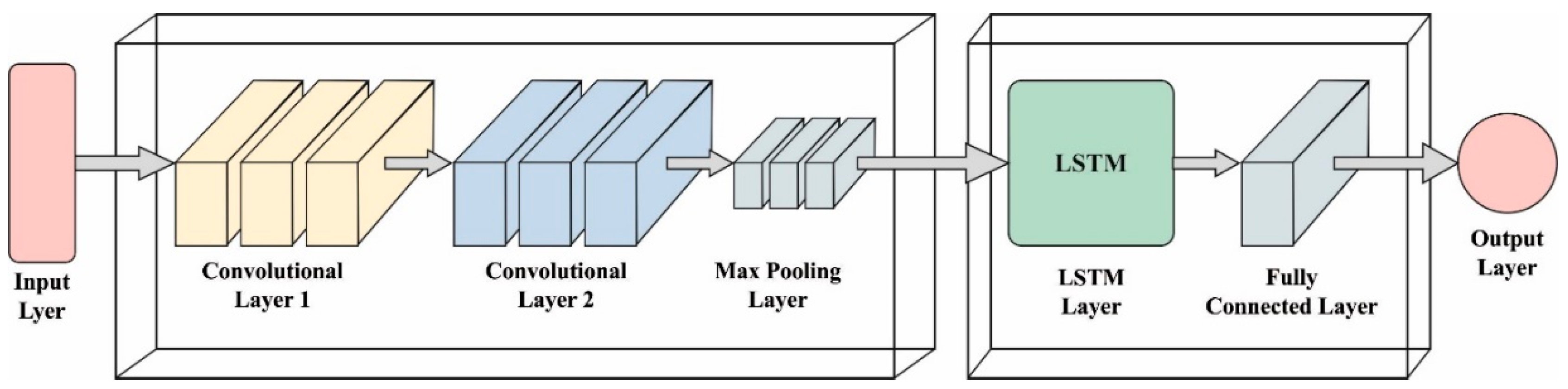
3.1. Design of HCNN-LSTM Based SOC Estimation
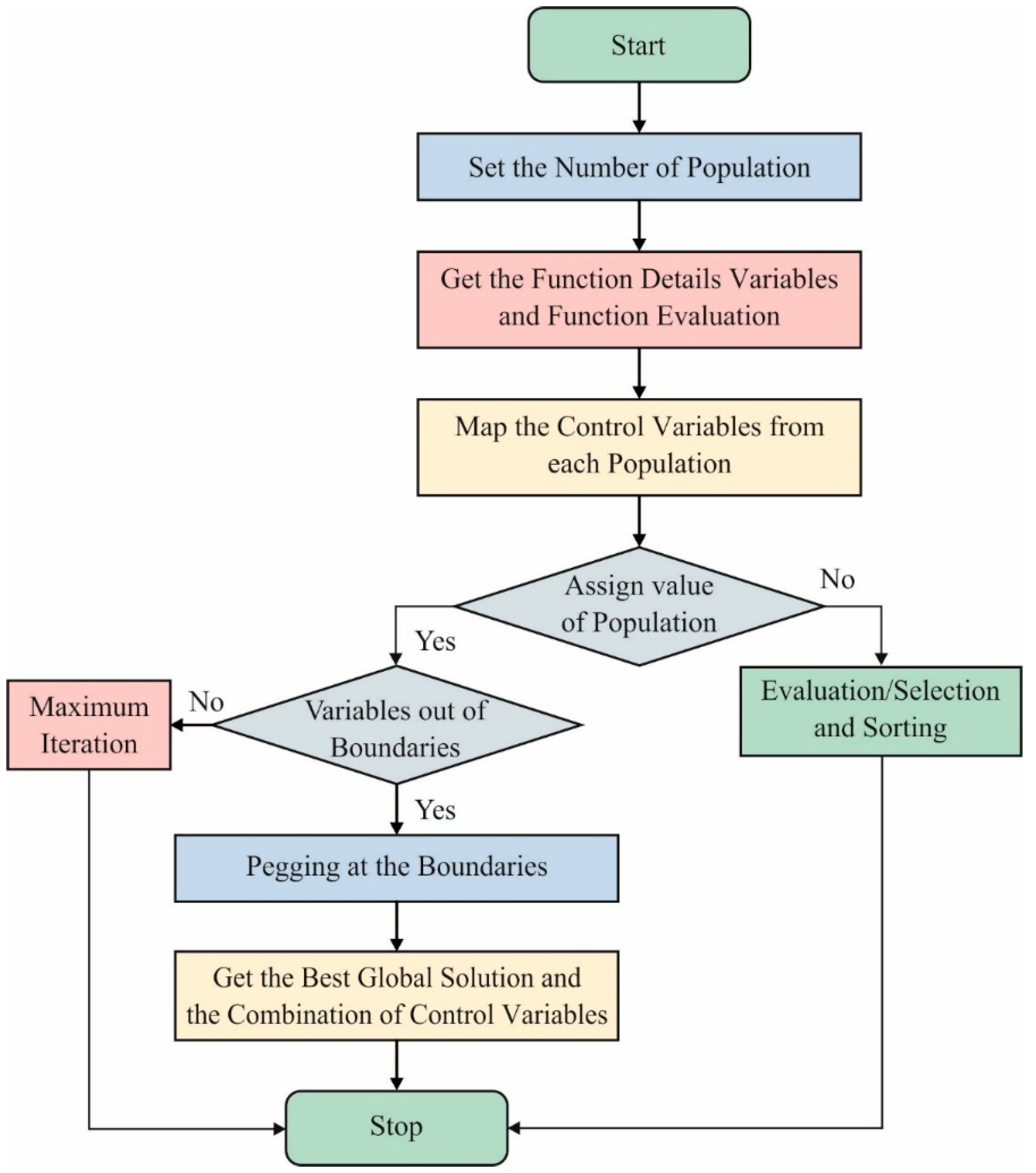
3.2. Design of BMO Based Hyperparameter Optimization
4. Performance Validation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Anselma, P.G. Computationally efficient evaluation of fuel and electrical energy economy of plug-in hybrid electric vehicles with smooth driving constraints. Appl. Energy 2022, 307, 118247. [Google Scholar] [CrossRef]
- Xiong, R.; Ma, S.; Li, H.; Sun, F.; Li, J. Toward a safer battery management system: A critical review on diagnosis and prognosis of battery short circuit. Iscience 2020, 23, 101010. [Google Scholar] [CrossRef] [PubMed]
- Hua, Y.; Wang, N.; Zhao, K. Simultaneous unknown input and state estimation for the linear system with a rank-deficient distribution matrix. Math. Probl. Eng. 2021, 2021, 1–11. [Google Scholar] [CrossRef]
- Xiong, R.; Yang, R.; Chen, Z.; Shen, W.; Sun, F. Online fault diagnosis of external short circuit for lithium-ion battery pack. IEEE Trans. Ind. Electron. 2019, 67, 1081–1091. [Google Scholar] [CrossRef]
- Zuo, H.; Zhang, B.; Huang, Z.; Wei, K.; Zhu, H.; Tan, J. Effect analysis on SOC values of the power lithium manganate battery during discharging process and its intelligent estimation. Energy 2022, 238, 121854. [Google Scholar] [CrossRef]
- Xiong, R.; Wang, J.; Shen, W.; Tian, J.; Mu, H. Co-estimation of State of charge and capacity for Lithium-ion batteries with multi-stage model fusion method. Engineering 2021, 7, 1469–1482. [Google Scholar] [CrossRef]
- Chen, X.; Shen, W.; Dai, M.; Cao, Z.; Jin, J.; Kapoor, A. Robust adaptive sliding-mode observer using RBF neural network for lithium-ion battery state of charge estimation in electric vehicles. IEEE Trans. Veh. Technol. 2015, 65, 1936–1947. [Google Scholar] [CrossRef]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Ahmed, R.; Emadi, A. Long short-term memory networks for accurate state-of-charge estimation of Li-ion batteries. IEEE Trans. Ind. Electron. 2017, 65, 6730–6739. [Google Scholar] [CrossRef]
- Kim, W.Y.; Lee, P.Y.; Kim, J.; Kim, K.S. A robust state of charge estimation approach based on nonlinear battery cell model for lithium-ion batteries in electric vehicles. IEEE Trans. Veh. Technol. 2021, 70, 5638–5647. [Google Scholar] [CrossRef]
- Jiaqiang, E.; Zhang, B.; Zeng, Y.; Wen, M.; Wei, K.; Huang, Z.; Chen, J.; Zhu, H.; Deng, Y. Effects analysis on active equalization control of lithium-ion batteries based on intelligent estimation of the state-of-charge. Energy 2022, 238, 121822. [Google Scholar]
- Zhang, M.; Wang, K.; Zhou, Y.T. Online state of charge estimation of lithium-ion cells using particle filter-based hybrid filtering approach. Complexity 2020, 2020, 1–10. [Google Scholar] [CrossRef]
- Zahid, T.; Xu, K.; Li, W.; Li, C.; Li, H. State of charge estimation for electric vehicle power battery using advanced machine learning algorithm under diversified drive cycles. Energy 2018, 162, 871–882. [Google Scholar] [CrossRef]
- Lai, X.; Wang, S.; He, L.; Zhou, L.; Zheng, Y. A hybrid state-of-charge estimation method based on credible increment for electric vehicle applications with large sensor and model errors. J. Energy Storage 2020, 27, 101106. [Google Scholar] [CrossRef]
- Veerendra, A.S.; Mohamed, M.R.; Leung, P.K.; Shah, A.A. Hybrid power management for fuel cell/supercapacitor series hybrid electric vehicle. Int. J. Green Energy 2021, 18, 128–143. [Google Scholar] [CrossRef]
- Chandran, V.; Patil, C.K.; Karthick, A.; Ganeshaperumal, D.; Rahim, R.; Ghosh, A. State of charge estimation of lithium-ion battery for electric vehicles using machine learning algorithms. World Electr. Veh. J. 2021, 12, 38. [Google Scholar] [CrossRef]
- How, D.N.; Hannan, M.A.; Lipu, M.S.H.; Sahari, K.S.; Ker, P.J.; Muttaqi, K.M. State-of-charge estimation of li-ion battery in electric vehicles: A deep neural network approach. IEEE Trans. Ind. Appl. 2020, 56, 5565–5574. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Shen, W.; Lu, J. State-of-charge estimation of LiFePO4 batteries in electric vehicles: A deep-learning enabled approach. Appl. Energy 2021, 291, 116812. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Du, J.; Liu, Z.; Wang, Y. State of charge estimation for Li-ion battery based on model from extreme learning machine. Control. Eng. Pract. 2014, 26, 11–19. [Google Scholar] [CrossRef]
- Kim, T.Y.; Cho, S.B. Predicting residential energy consumption using CNN-LSTM neural networks. Energy 2019, 182, 72–81. [Google Scholar] [CrossRef]
- Sulaiman, M.H.; Mustaffa, Z.; Saari, M.M.; Daniyal, H. Barnacles mating optimizer: A new bio-inspired algorithm for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2020, 87, 103330. [Google Scholar] [CrossRef]
- Jia, H.; Sun, K. Improved barnacles mating optimizer algorithm for feature selection and support vector machine optimization. Pattern Anal. Appl. 2021, 24, 1–26. [Google Scholar] [CrossRef] [PubMed]
- Lipu, M.S.H.; Hannan, M.A.; Hussain, A.; Saad, M.H.; Ayob, A.; Uddin, M.N. Extreme learning machine model for state-of-charge estimation of lithium-ion battery using gravitational search algorithm. IEEE Trans. Ind. Appl. 2019, 55, 4225–4234. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
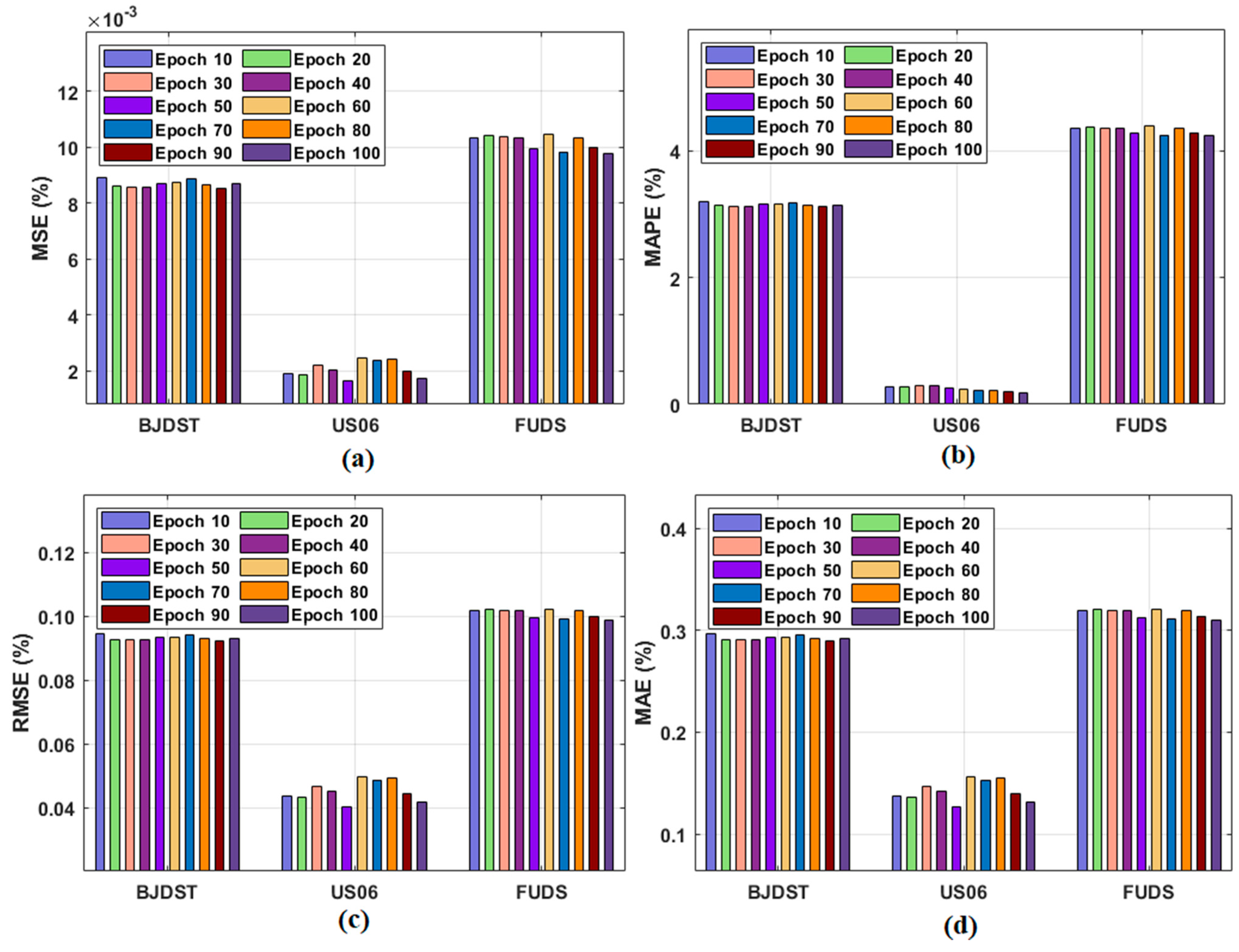
| Drive Cycle | No. of Epochs | MSE | RMSE | MAE | MAPE | Rank |
|---|---|---|---|---|---|---|
| BJDST | Epoch-10 | 0.008921 | 0.094451 | 0.296270 | 3.188007 | 10 |
| Epoch-20 | 0.008601 | 0.092742 | 0.290908 | 3.130307 | 4 | |
| Epoch-30 | 0.008568 | 0.092563 | 0.290349 | 3.124296 | 2 | |
| Epoch-40 | 0.008569 | 0.092569 | 0.290366 | 3.124478 | 3 | |
| Epoch-50 | 0.008713 | 0.093343 | 0.292796 | 3.150622 | 7 | |
| Epoch-60 | 0.008759 | 0.093590 | 0.293568 | 3.158928 | 8 | |
| Epoch-70 | 0.008848 | 0.094064 | 0.295055 | 3.174936 | 9 | |
| Epoch-80 | 0.008661 | 0.093064 | 0.291921 | 3.141206 | 5 | |
| Epoch-90 | 0.008525 | 0.092331 | 0.289620 | 3.116446 | 1 | |
| Epoch-100 | 0.008699 | 0.093268 | 0.292560 | 3.148090 | 6 | |
| Average | 0.008686 | 0.093199 | 0.292341 | 3.145732 | ||
| US06 | Epoch-10 | 0.001922 | 0.043841 | 0.137517 | 0.280993 | 4 |
| Epoch-20 | 0.001885 | 0.043417 | 0.136187 | 0.278276 | 3 | |
| Epoch-30 | 0.002204 | 0.046947 | 0.147261 | 0.300902 | 7 | |
| Epoch-40 | 0.002048 | 0.045255 | 0.141953 | 0.290058 | 6 | |
| Epoch-50 | 0.001633 | 0.040410 | 0.126758 | 0.259008 | 1 | |
| Epoch-60 | 0.002474 | 0.049739 | 0.156020 | 0.233493 | 10 | |
| Epoch-70 | 0.002380 | 0.048785 | 0.153027 | 0.227369 | 8 | |
| Epoch-80 | 0.002428 | 0.049275 | 0.154563 | 0.218241 | 9 | |
| Epoch-90 | 0.001983 | 0.044531 | 0.139683 | 0.197230 | 5 | |
| Epoch-100 | 0.001738 | 0.041689 | 0.130769 | 0.177651 | 2 | |
| Average | 0.002070 | 0.045389 | 0.142374 | 0.246322 | ||
| FUDS | Epoch-10 | 0.010348 | 0.101725 | 0.319087 | 4.359018 | 7 |
| Epoch-20 | 0.010417 | 0.102064 | 0.320149 | 4.373526 | 9 | |
| Epoch-30 | 0.010363 | 0.101799 | 0.319318 | 4.362176 | 8 | |
| Epoch-40 | 0.010327 | 0.101622 | 0.318763 | 4.354592 | 5 | |
| Epoch-50 | 0.009930 | 0.099649 | 0.312576 | 4.270070 | 3 | |
| Epoch-60 | 0.010465 | 0.102299 | 0.320886 | 4.383591 | 10 | |
| Epoch-70 | 0.009826 | 0.099126 | 0.310935 | 4.247651 | 2 | |
| Epoch-80 | 0.010342 | 0.101696 | 0.318994 | 4.357754 | 6 | |
| Epoch-90 | 0.010003 | 0.100015 | 0.313723 | 4.285737 | 4 | |
| Epoch-100 | 0.009782 | 0.098904 | 0.310238 | 4.238130 | 1 | |
| Average | 0.010180 | 0.100890 | 0.316467 | 4.323224 |
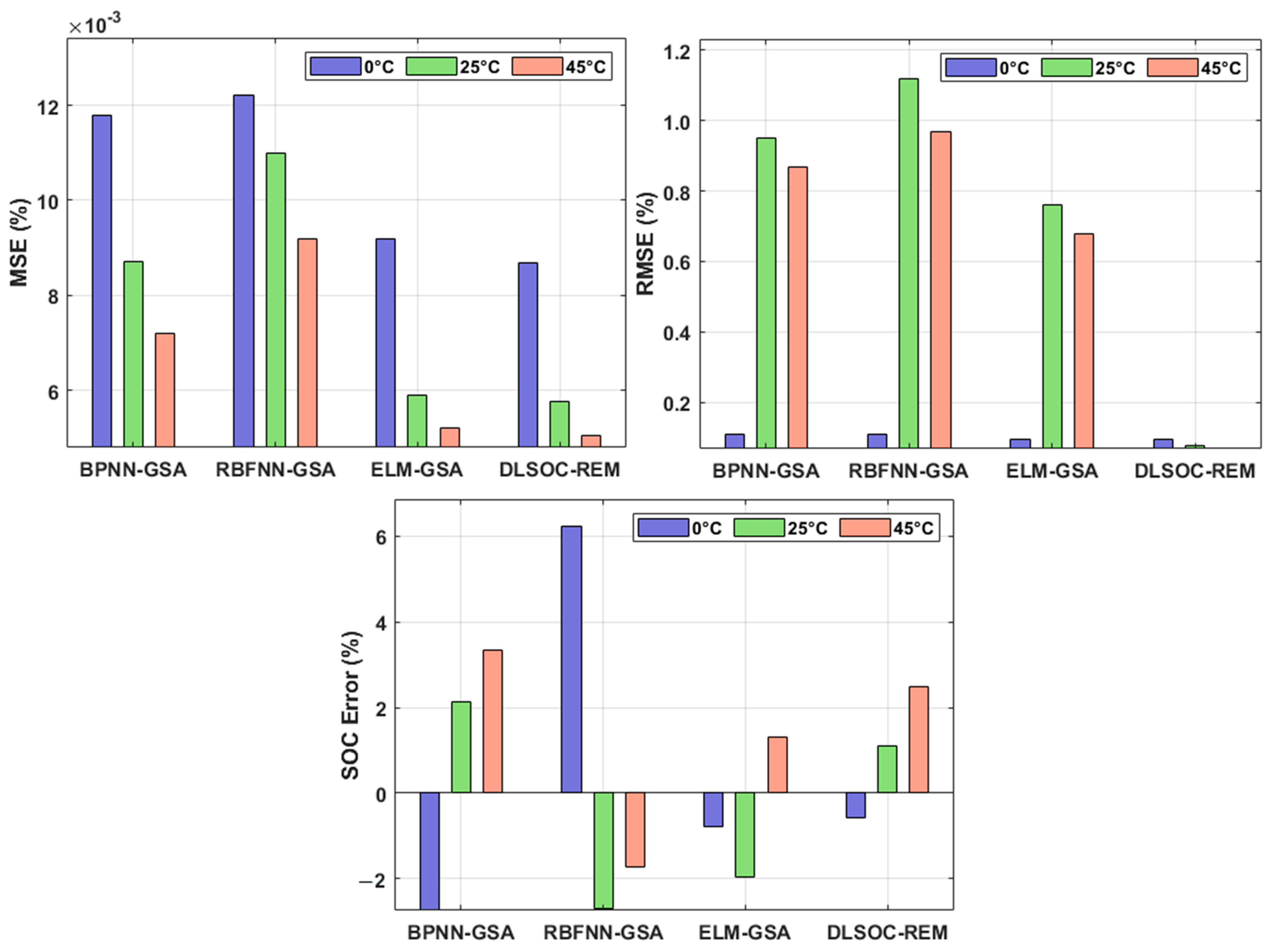
| Drive Cycle | Model | Temperature | RMSE (%) | MSE (%) | SOC Error (%) |
|---|---|---|---|---|---|
| BJDST | BPNN-GSA | 0 °C | 0.108628 | 0.011800 | [−5.08 + 5.18] |
| 25 °C | 0.950000 | 0.008700 | [−5.2 + 5.1] | ||
| 45 °C | 0.870000 | 0.007200 | [−4.8 + 4.6] | ||
| RBFNN-GSA | 0 °C | 0.110454 | 0.012200 | [−6.51 + 6.87] | |
| 25 °C | 1.120000 | 0.011000 | [−6.6 + 6.8] | ||
| 45 °C | 0.970000 | 0.009200 | [−5.3 + 4.9] | ||
| ELM-GSA | 0 °C | 0.095917 | 0.009200 | [−2.99 + 3.7] | |
| 25 °C | 0.760000 | 0.005900 | [−3.1 + 3.6] | ||
| 45 °C | 0.680000 | 0.005200 | [−2.9 + 3] | ||
| DLSOC-REM | 0 °C | 0.093199 | 0.008686 | [−1.99 + 2.5] | |
| 25 °C | 0.075895 | 0.005760 | [−2.51 + 2.8] | ||
| 45 °C | 0.071063 | 0.005050 | [−2.7 + 2.9] | ||
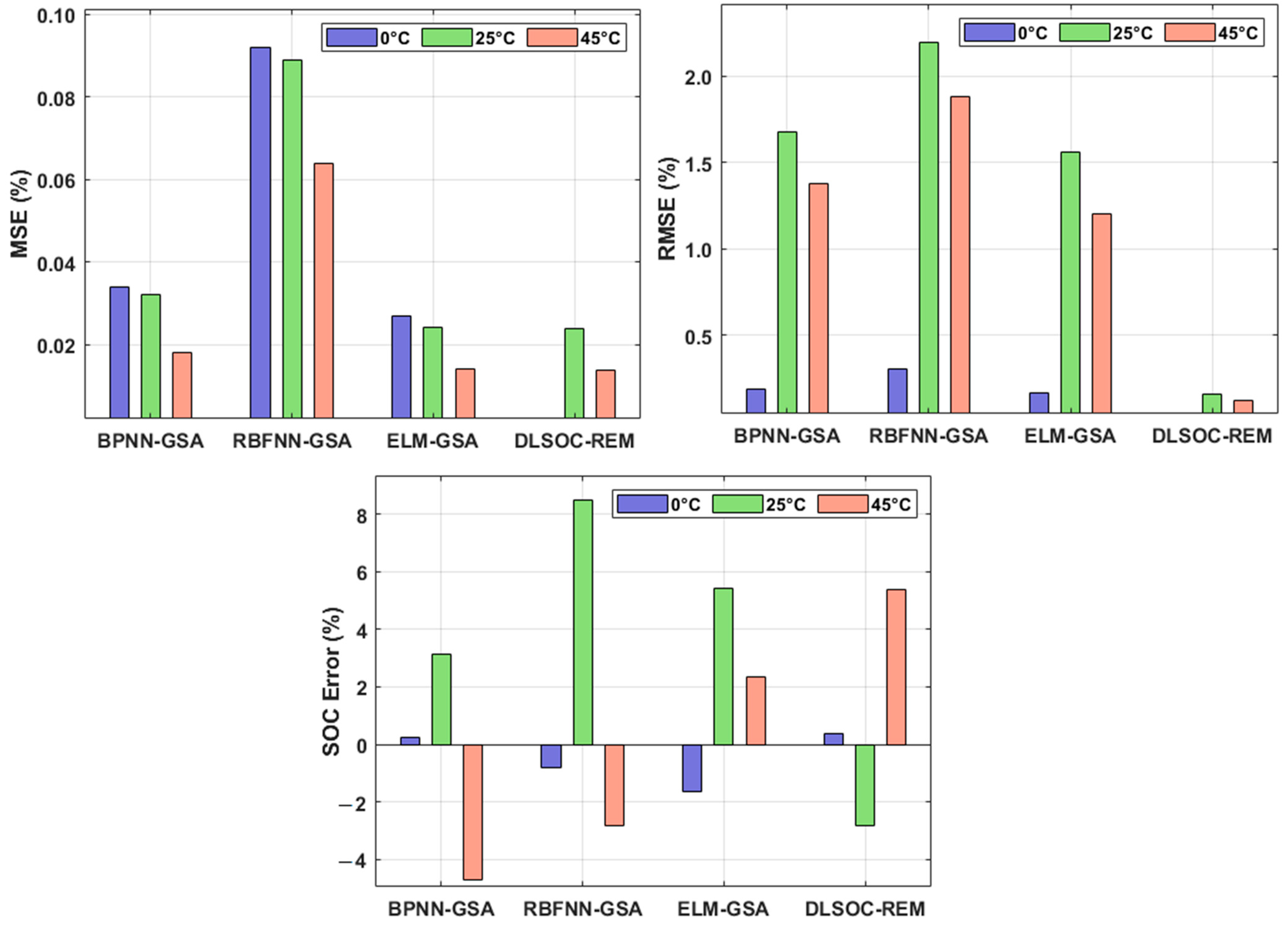
| US06 | BPNN-GSA | 0 °C | 0.184391 | 0.034000 | [−6.14 + 8.76] |
| 25 °C | 1.680000 | 0.032000 | [−6.2 + 8.7] | ||
| 45 °C | 1.380000 | 0.018000 | [−5.1 + 5.7] | ||
| RBFNN-GSA | 0 °C | 0.303480 | 0.092100 | [−8.61 + 9.25] | |
| 25 °C | 2.200000 | 0.089000 | [−8.7 + 9.2] | ||
| 45 °C | 1.880000 | 0.064000 | [−6.3 + 6.8] | ||
| ELM-GSA | 0 °C | 0.164317 | 0.027000 | [−5.49 + 6.58] | |
| 25 °C | 1.560000 | 0.024000 | [−5.6 + 6.5] | ||
| 45 °C | 1.200000 | 0.014000 | [−4.8 + 5.3] | ||
| DLSOC-REM | 0 °C | 0.045389 | 0.002070 | [−4.87 + 5.1] | |
| 25 °C | 0.154499 | 0.023870 | [−5.3 + 5.5] | ||
| 45 °C | 0.117686 | 0.013850 | [−4.7 + 4.9] | ||
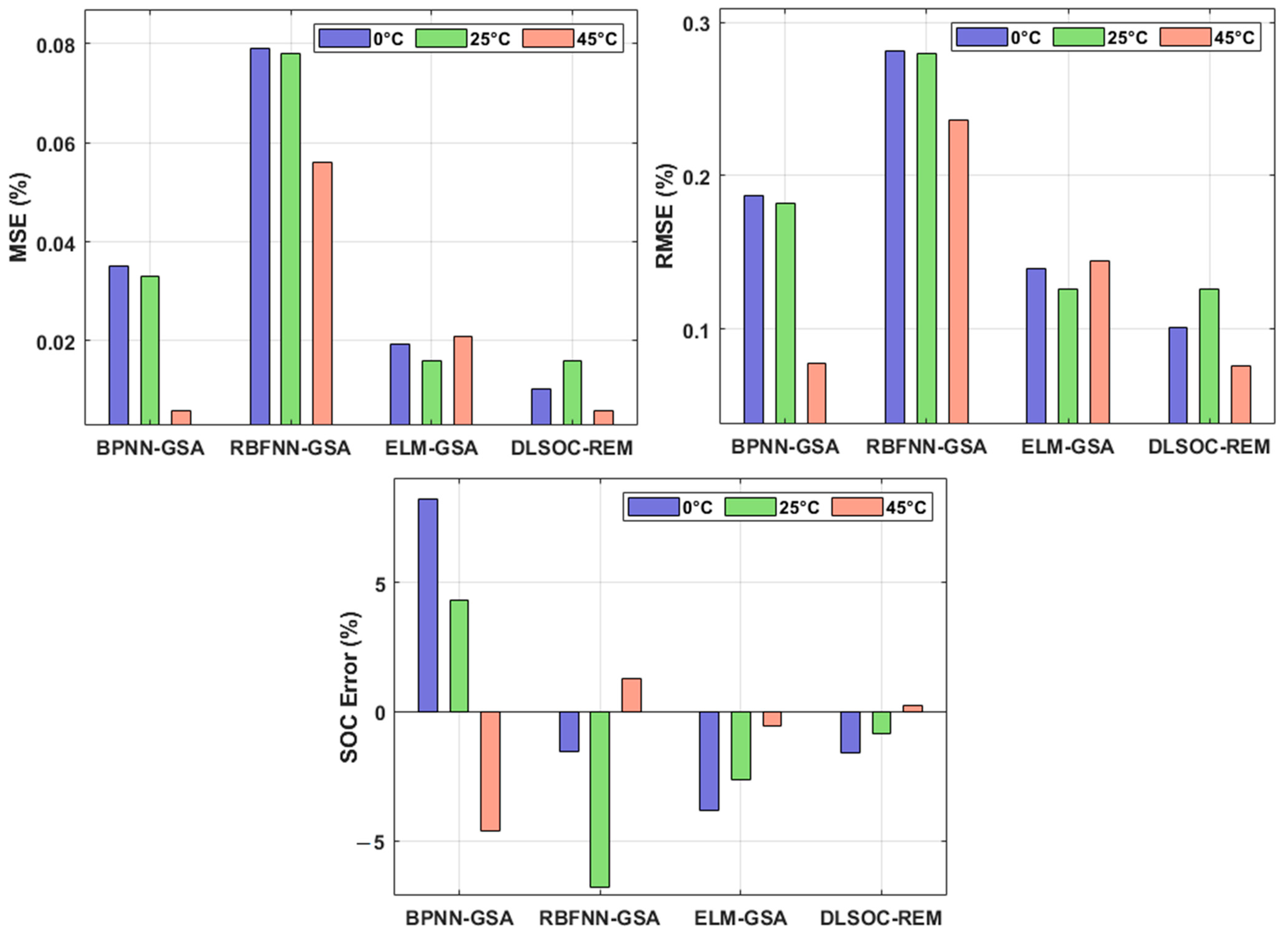
| FUDS | BPNN-GSA | 0 °C | 0.187350 | 0.035100 | [−6.06 + 8.88] |
| 25 °C | 0.181659 | 0.033000 | [−6.15 + 8.77] | ||
| 45 °C | 0.077460 | 0.006000 | [−5.12 + 5.71] | ||
| RBFNN-GSA | 0 °C | 0.281069 | 0.079000 | [−8.51 + 9.35] | |
| 25 °C | 0.279285 | 0.078000 | [−8.61 + 9.29] | ||
| 45 °C | 0.236643 | 0.056000 | [−6.3 + 6.85] | ||
| ELM-GSA | 0 °C | 0.139284 | 0.019400 | [−5.57 + 6.68] | |
| 25 °C | 0.126491 | 0.016000 | [−5.69 + 6.58] | ||
| 45 °C | 0.144914 | 0.021000 | [−4.78 + 5.23] | ||
| DLSOC-REM | 0 °C | 0.100890 | 0.010180 | [−5.1−5.3] | |
| 25 °C | 0.126095 | 0.015900 | [−4.2 + 4.7] | ||
| 45 °C | 0.076551 | 0.005860 | [−4.6 + 5] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vellingiri, M.T.; Mehedi, I.M.; Palaniswamy, T. A Novel Deep Learning-Based State-of-Charge Estimation for Renewable Energy Management System in Hybrid Electric Vehicles. Mathematics 2022, 10, 260. https://0-doi-org.brum.beds.ac.uk/10.3390/math10020260
Vellingiri MT, Mehedi IM, Palaniswamy T. A Novel Deep Learning-Based State-of-Charge Estimation for Renewable Energy Management System in Hybrid Electric Vehicles. Mathematics. 2022; 10(2):260. https://0-doi-org.brum.beds.ac.uk/10.3390/math10020260
Chicago/Turabian StyleVellingiri, Mahendiran T., Ibrahim M. Mehedi, and Thangam Palaniswamy. 2022. "A Novel Deep Learning-Based State-of-Charge Estimation for Renewable Energy Management System in Hybrid Electric Vehicles" Mathematics 10, no. 2: 260. https://0-doi-org.brum.beds.ac.uk/10.3390/math10020260