Medieval Archaeology Under the Canopy with LiDAR. The (Re)Discovery of a Medieval Fortified Settlement in Southern Italy

 ,
,
Abstract
:
1. Introduction
2. Materials and Methods
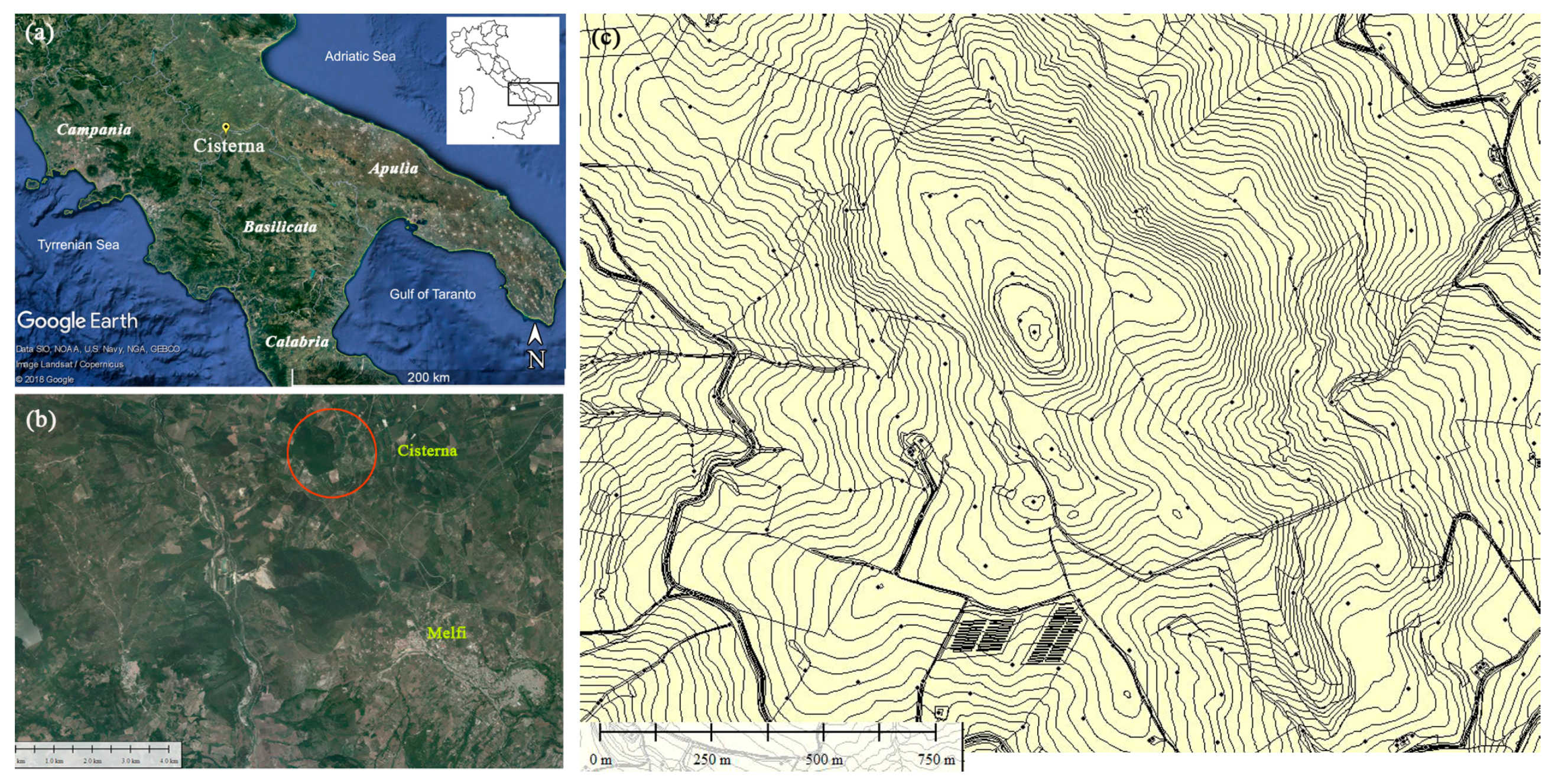
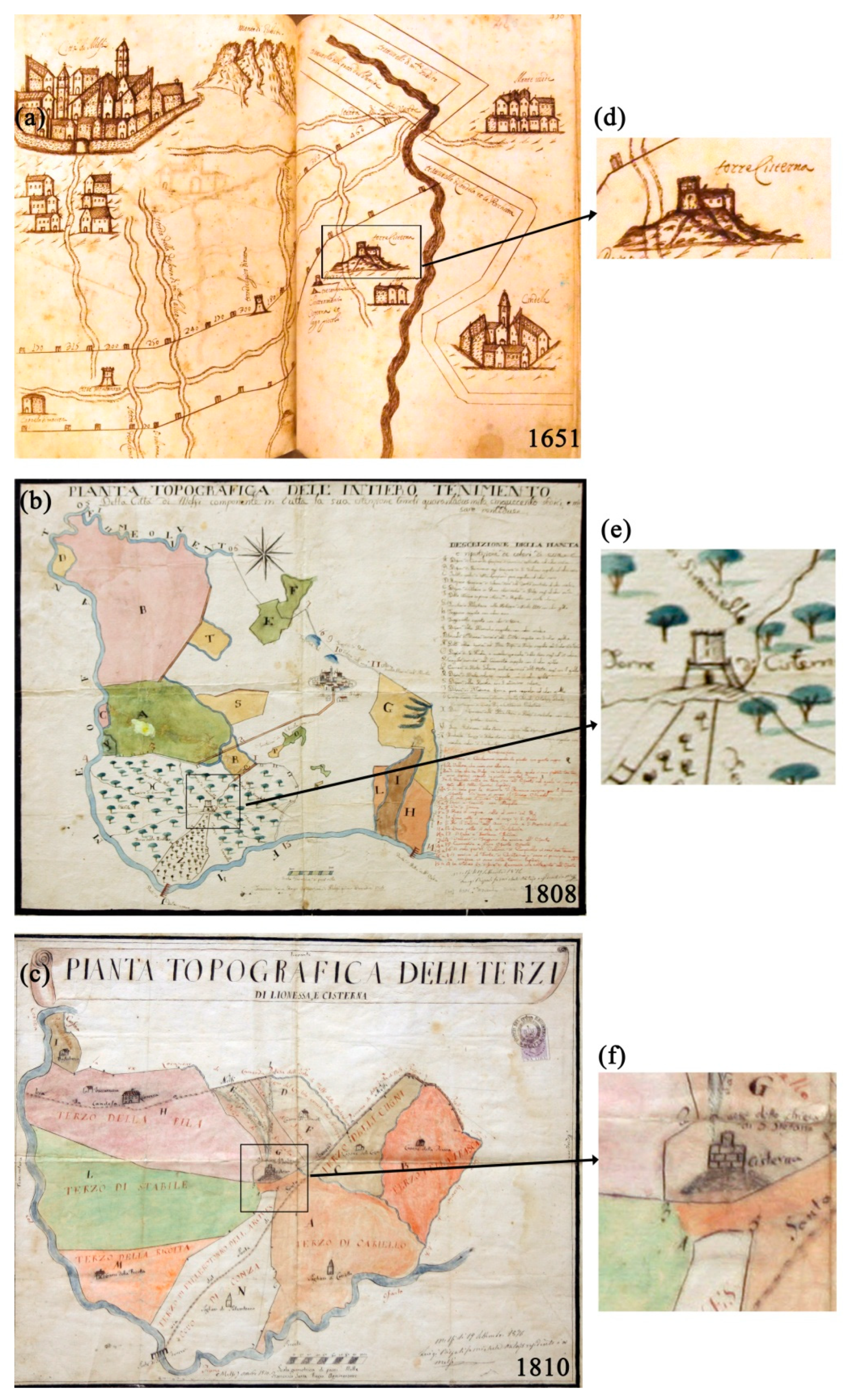
2.1. Study Area
2.2. LiDAR: Technology and Data Acquisition
2.3. Data Processing: From Filtering to Classification
2.4. Visualization Methods: State of the Art
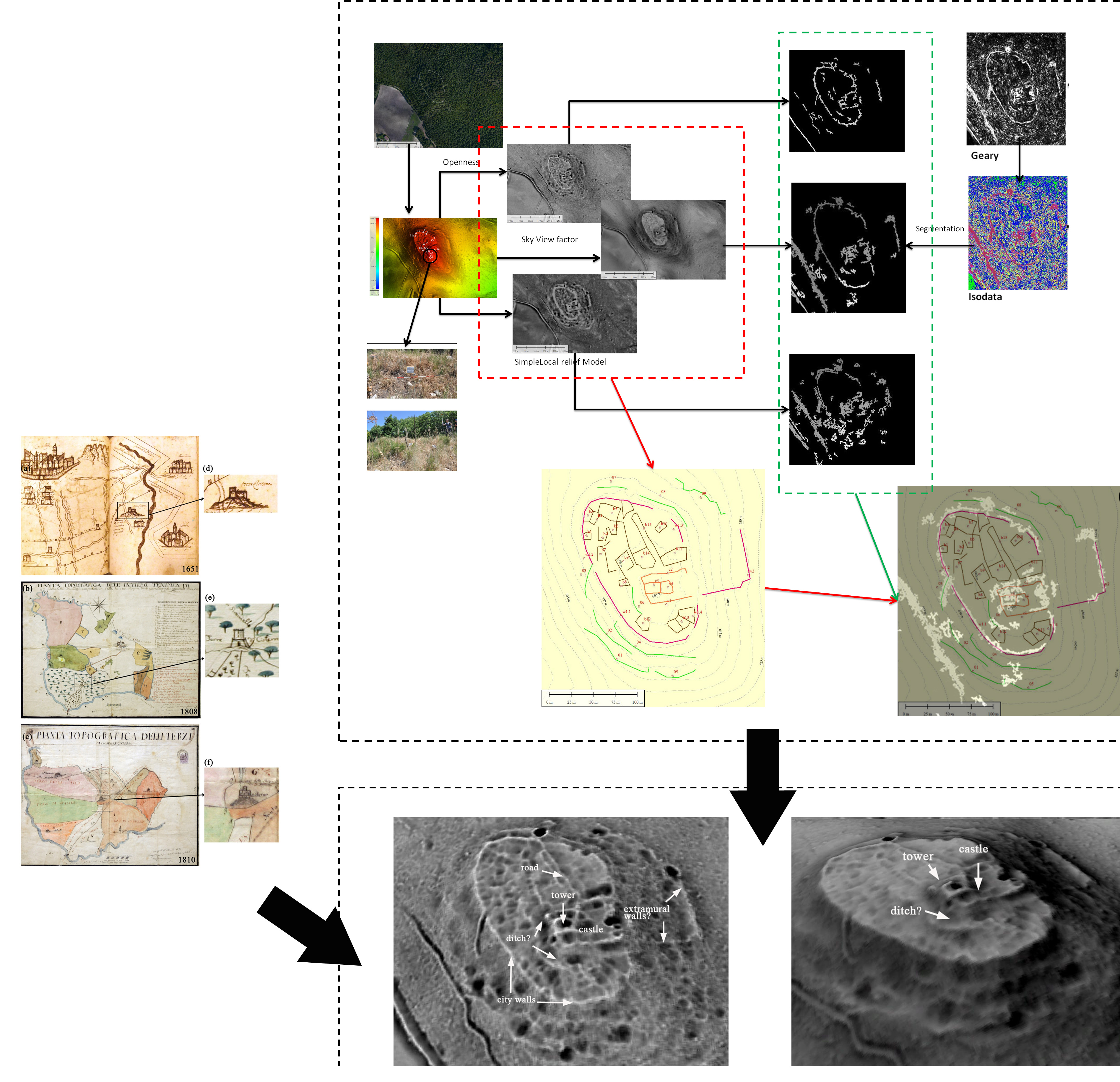
2.5. Methodology
2.5.1. Enhancement
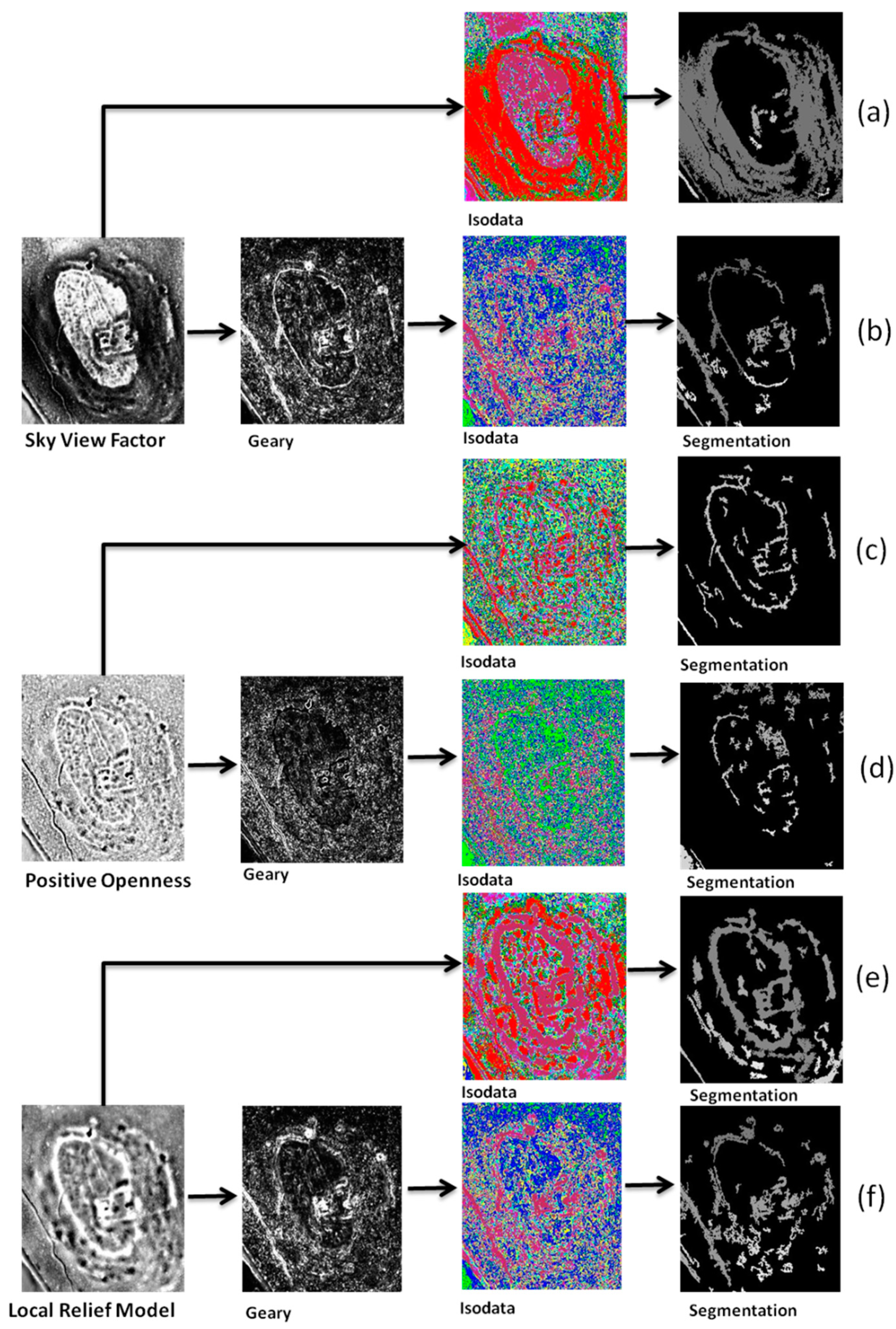
2.5.2. Automatic Feature Extraction
2.5.3. Reconnaissance of Archaeological Features and Validation
3. Results and Discussion
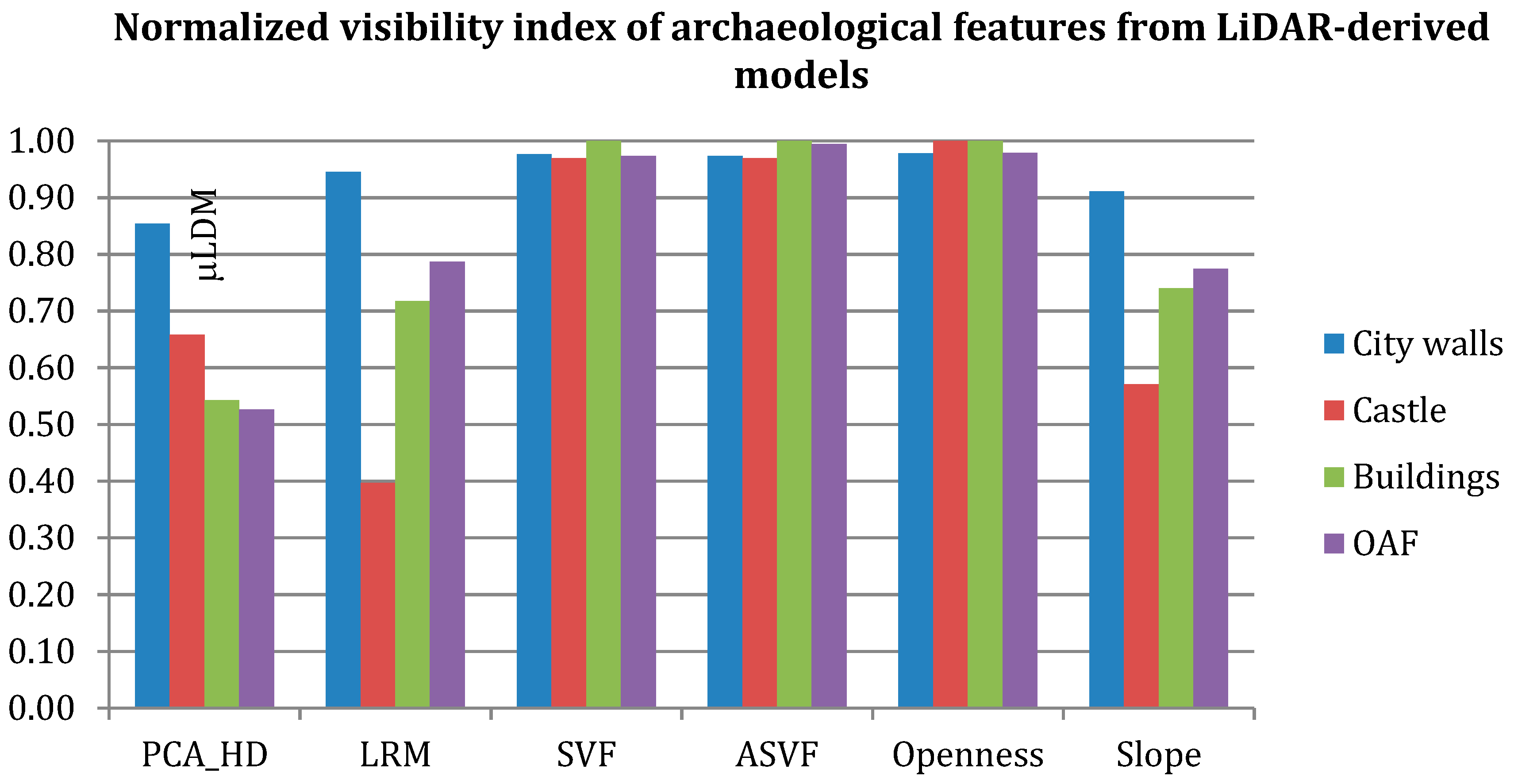
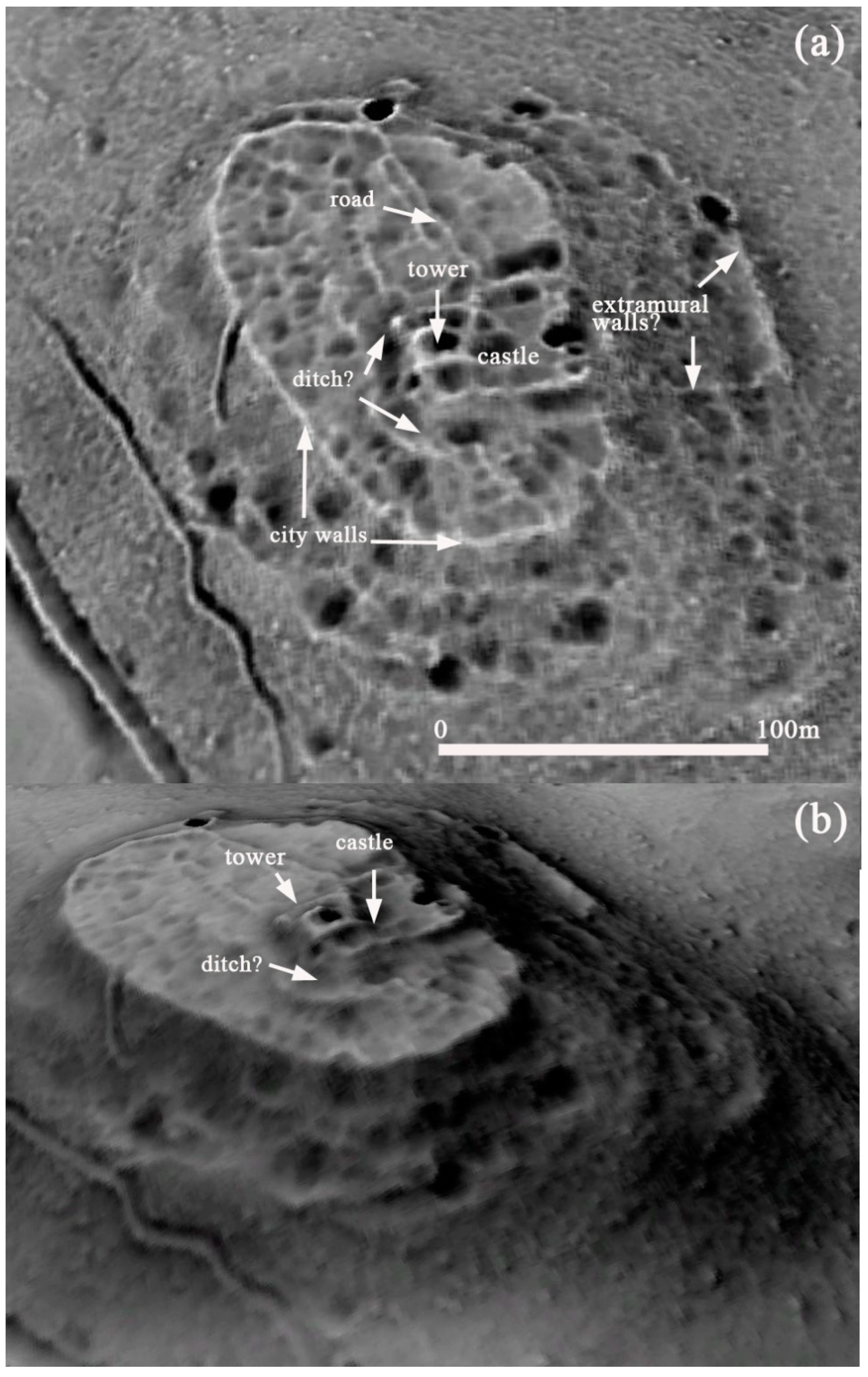
3.1. Visual Inspections of LDMs: Results and Discussion
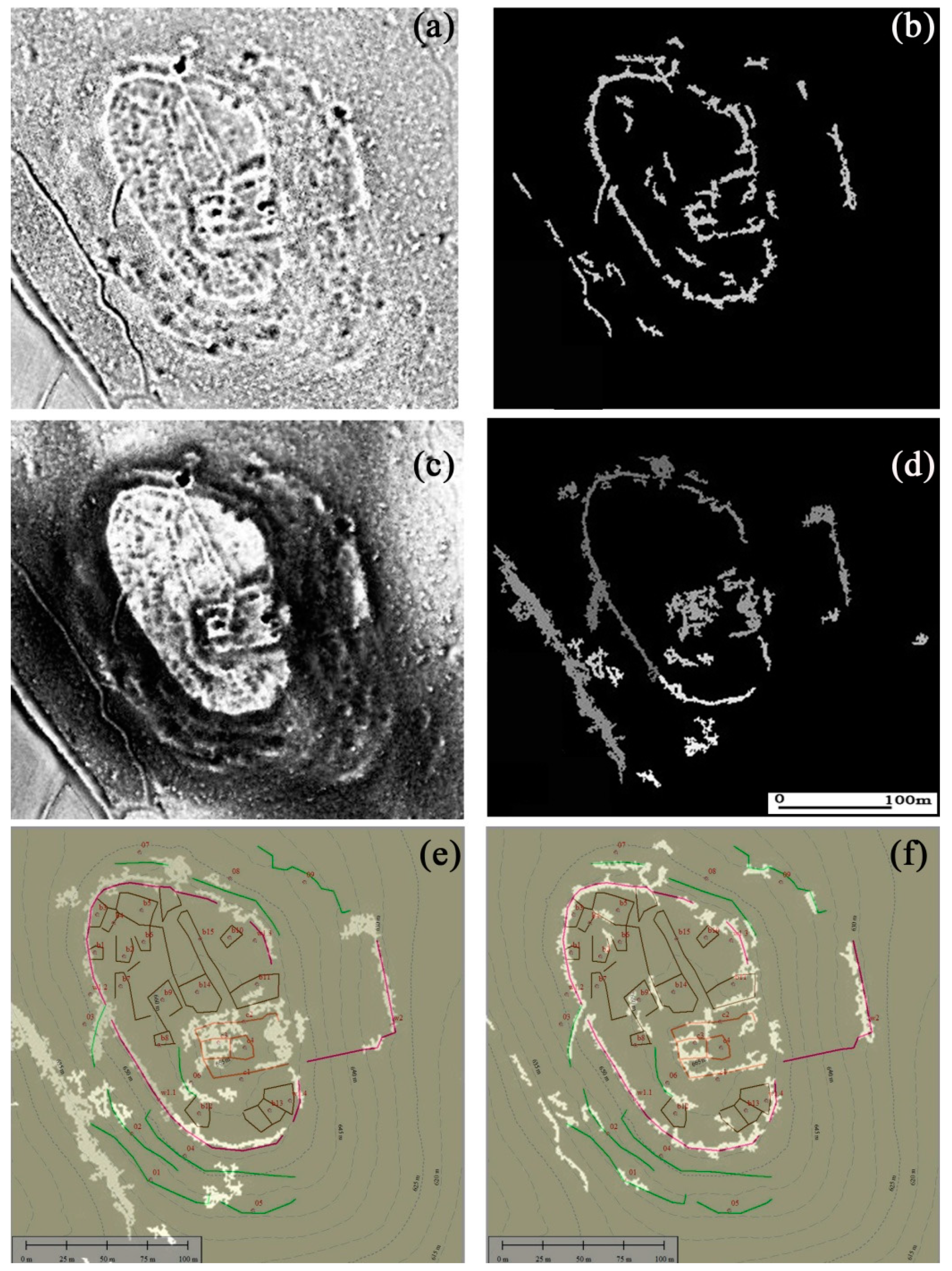
3.2. Automatic Feature Extraction: Results and Discussion
3.3. Archaeological Result: Brief Considerations
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chase, A.S.Z.; Chase, D.Z.; Chase, A.F. LiDAR for Archaeological Research and the Study of Historical Landscapes. In Sensing the Past: From Artifact to Historical Site; Masini, N., Soldovieri, F., Eds.; Springer: New York, NY, USA, 2017; pp. 89–100. [Google Scholar]
- Chase, A.F.; Chase, D.Z.; Weishampel, J.F.; Drake, J.B.; Shrestha, R.L.; Slatton, K.C.; Awe, J.; Carter, W.E. Airborne LiDAR, archaeology, and the ancient Maya landscape at Caracol, Belize. J. Archaeol. Sci. 2011, 38, 387–398. [Google Scholar] [CrossRef]
- Evans, D.H.; Fletcher, R.J.; Pottier, C.; Chevance, J.B.; Soutif, D.; Tan, B.S.; Im, S.; Ea, D.; Tin, T.; Kim, S.; et al. Uncovering archaeological landscapes at angkor using LiDAR. Proc. Natl. Acad. Sci. USA 2013, 110, 12595–12600. [Google Scholar] [CrossRef] [PubMed]
- Doneus, M.; Briese, C.; Fera, M.; Janner, M. Archaeological prospection of forested areas using full-waveform airborne laser scanning. J. Archaeol. Sci. 2008, 35, 882–893. [Google Scholar] [CrossRef]
- Fernández-Lozano, J.; Gutiérrez-Alonso, G. Improving archaeological prospection using localized UAVs assisted photogrammetry: An example from the Roman Gold District of the Eria River Valley (NW Spain). J. Archaeol. Sci. 2016, 5, 509–520. [Google Scholar] [CrossRef]
- Fernández-Lozano, J.; Gutiérrez-Alonso, G.; Fernández-Morán, M. Using airborne LiDAR sensing technology and aerial orthoimages to unravel roman water supply systems and gold works in NW Spain (Eria valley, León). J. Archaeol. Sci. 2015, 53, 356–373. [Google Scholar] [CrossRef]
- Lasaponara, R.; Masini, N.; Holmgren, R.; Backe Forsberg, Y. Integration of aerial and satellite remote sensing for archaeological investigations: A case study of the Etruscan site San Giovenale. J. Geophys. Eng. 2012, 9, S26–S39. [Google Scholar] [CrossRef]
- Hutson, S.R. Adapting LiDAR data for regional variation in the tropics: A case study from the Northern Maya Lowlands. J. Archaeol. Sci. 2015, 4, 252–263. [Google Scholar] [CrossRef] [Green Version]
- Prufer, K.M.; Thompson, A.E.; Kennett, D.J. Evaluating airborne LiDAR for detecting settlements and modified landscapes in disturbed tropical environments at Uxbenká, Belize. J. Archaeol. Sci. 2015, 57, 1–13. [Google Scholar] [CrossRef]
- Masini, N.; Coluzzi, R.; Lasaponara, R. On the Airborne Lidar Contribution in Archaeology: From Site Identification to Landscape Investigation. In Laser Scanning, Theory and Applications; Wang, C.-C., Ed.; Intech: London, UK, 2011; pp. 263–290. ISBN 978-953-307-205-0. [Google Scholar]
- Hesse, R. LiDAR-derived Local Relief Models a new tool for archaeological prospection. Archaeol. Prospect. 2010, 17, 67–72. [Google Scholar] [CrossRef]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-view factor as a relief visualization technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef]
- Doneus, M. Openness as visualization technique for interpretative mapping of airborne LiDAR derived digital terrain models. Remote Sens. 2013, 5, 6427–6442. [Google Scholar] [CrossRef]
- D’Archimbaud, D. Rougiers, Castrum médiéval déserté. Pays Sainte-Baume 2001, 9, 6–8. [Google Scholar]
- Simms, A. Deserted medieval villages and fields in Germany, a survey of the literature with a select bibliography. J. Hist. Geogr. 1976, 2, 223–238. [Google Scholar] [CrossRef]
- Corns, A.; Shaw, R. High resolution 3-dimensional documentation of archaeological monuments & landscapes using airborne LiDAR. J. Cult. Herit. 2009, 10 (Suppl. 1), e72–e77. [Google Scholar]
- Heine, H.W. Innovative methods for surveying castles located in forests or shallow water in Lower Saxony. [Innovative methoden zur erfassung und vermessung von burgen in wäldern und flachgewässern (Niedersachsen) CG]. Chateau Gaillard 2012, 25, 197–202. [Google Scholar]
- Lasaponara, R.; Masini, N. Full-waveform Airborne Laser Scanning for the detection of medieval archaeological microtopographic relief. J. Cult. Herit. 2009, 10, e78–e82. [Google Scholar] [CrossRef]
- Lasaponara, R.; Coluzzi, R.; Gizzi, F.T.; Masini, N. On the LiDAR contribution for the archaeological and geomorphological study of a deserted medieval village in Southern Italy. J. Geophys. Eng. 2010, 7, 155–163. [Google Scholar] [CrossRef]
- Krivanek, R. Comparison Study to the Use of Geophysical Methods at Archaeological Sites Observed by Various Remote Sensing Techniques in the Czech Republic. Geosciences 2017, 7, 81. [Google Scholar] [CrossRef]
- Simmons, I.G. Rural landscapes between the East Fen and the Tofts in south-east Lincolnshire 1100–1550. Landsc. Hist. 2013, 34, 81–90. [Google Scholar] [CrossRef]
- Baubiniene, A.; Morkunaite, R.; Bauža, D.; Vaitkevicius, G.; Petrošius, R. Aspects and methods in reconstructing the medieval terrain and deposits in Vilnius. Quat. Int. 2015, 386, 83–88. [Google Scholar] [CrossRef]
- Pedio, T. Centri Scomparsi in Basilicata; Edizioni Osanna: Venosa, Italy, 1990. [Google Scholar]
- Malatesta, A.; Perno, U.; Stampanoni, G. (Eds.) Note Illustrative Della Carta Geologica d’Italia Alla Scala 1:100,000. Foglio 175 (Cerignola); Istituto Poligrafico e Zecca dello Stato-Archivi di Stato: Roma, Italy, 1967. (In Italian) [Google Scholar]
- Calò Maria, M.S.I. “villages désertés” della Capitanata. Fiorentino e Montecorvino. In Proceedings of the XXVII National Conference on “Preistoria—Protostoria—Storia della Daunia, San Severo, Italy, 25–26 Novembre 2005; pp. 43–90. [Google Scholar]
- Sthamer, E. Die Verwaltung der Kastelle im Königreich Sizilien unter Kaiser Friedrich II. Und Karl I. von Anjou; Walter de Gruyter: Leipzig, Germany, 1914. [Google Scholar]
- Sciara, F. Ritrovate le Residenze di Caccia di Federico II Imperatore a Cisterna (Melfi) e Presso Apice; Arte Medievale Serise 2; Silvana Editoriale: Cinisello Balsamo (Milano), Italy, 1997; Volume 11, pp. 125–131. [Google Scholar]
- Fortunato, G. Badie, Feudi e Baroni Della Valle di Vitalba; Note a Fortunato, Per la Storia del Mezzogiorno d’Italia nell’età medievale Montemurro, Matera s.a. Edizione definitiva in G. Fortunato Badie feudali e baroni; Pedio, T., Ed.; Lacaita Editore: Manduria, Italy, 1968; Volume III, pp. 7–627. [Google Scholar]
- Angelini, G. Venosa e la media Valle dell’Ofanto nella cartografia antica in Formez. In La Natura e il Paesaggio in Orazio; Centro Universitario Europeo per i Beni Culturali: Ravello, Italy, 1995; pp. 37–48. [Google Scholar]
- Ardoini, P.B. Descrizione dello Stato di Melfi (1674), Introduzione e Note di Enzo Navazio, s.l.; Casa Editrice Tre Taverne: Melfi, Italy, 1980. [Google Scholar]
- Liaci Marcianese, A. Melfi nella storia e nell’economia (II). In La Zagaglia: Rassegna di Scienze, Lettere ed Arti, A. X, n. 38; Emeroteca Digitale Salentina Lecce 1968; pp. 189–202.
- Mallet, C.; Bretar, F. Full-waveform topographic LiDAR: State-of-the-art. ISPRS J. Photogramm. Remote Sens. 2009, 64, 1–16. [Google Scholar] [CrossRef]
- Hu, B.; Gumerov, D.; Wang, J.; Zhang, W. An Integrated Approach to Generating Accurate DTM from Airborne Full-Waveform LiDAR Data. Remote Sens. 2017, 9, 871. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Experimental comparison of filtering algorithms for bare-earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 110–117. [Google Scholar]
- Briese, C.; Pfeifer, N. Airborne laser scanning and derivation of digital terrain models. In Optical 3D Measurement Techniques; Gruen, A., Kahmen, H., Eds.; Technical University: Vienna, Austria, 2001; pp. 80–87. [Google Scholar]
- Elmqvist, M. Ground estimation of laser radar data using active shape models. In Proceedings of the OEEPE Workshop on Airborne Laserscanning and Interferometric SAR for Detailed Digital Elevation Models, Stockholm, Sweden, 1–3 March 2001; Volume 40, p. 8. [Google Scholar]
- Soininen, A. Terrascan User’s Guide. Terrasolid: Helsinki, Finland. Available online: http://www.terrasolid.com/download/user_guides.php (accessed on 30 May 2017).
- Lasaponara, R.; Coluzzi, R.; Masini, N. Flights into the past: Full-Waveform airborne laser scanning data for archaeological investigation. J. Archaeol. Sci. 2011, 38, 2061–2070. [Google Scholar] [CrossRef]
- Devereux, B.J.; Amable, G.S.; Crow, P. Visualisation of LiDAR terrain models for archaeological feature detection. Antiquity 2008, 82, 470–479. [Google Scholar] [CrossRef]
- Yokoyama, R.; Shlrasawa, M.; Pike, R.J. Visualizing Topography by Openness: A New Application of Image Processing to Digital Elevation Models. Photogramm. Eng. Remote Sens. 2002, 68, 251–266. [Google Scholar]
- Kokalj, Ž.; Hesse, R. Airborne Laser Scanning Raster Data Visualization. A Guide to Good Practice; Založba ZRC: Ljubljana, Republika Slovenija, 2017. [Google Scholar]
- Bennett, R.; Welham, K.; Hill, R.A.; Ford, A. A comparison of visualization techniques for models created from airborne laser scanned data. Archaeol. Prospect. 2012, 19, 41–48. [Google Scholar] [CrossRef]
- Challis, K.; Forlin, P.; Kincey, M. A Generic Toolkit for the Visualization of Archaeological Features on Airborne LiDAR Elevation Data. Archaeol. Prospect. 2011. [Google Scholar] [CrossRef]
- Mayoral, A.; Toumazet, J.-P.; Simon, F.-X.; Vautier, F.; Peiry, J.-L. The Highest Gradient Model: A New Method for Analytical Assessment of the Efficiency of LiDAR-Derived Visualization Techniques for Landform Detection and Mapping. Remote Sens. 2017, 9, 120. [Google Scholar] [CrossRef]
- Relief Visualization Toolbox (RVT). Available online: https://iaps.zrc-sazu.si/en/rvt#v (accessed on 13 August 2018).
- LiDAR-Visualisation Toolbox (LiVT). Available online: http://www.arcland.eu/outreach/software-tools/1806-lidar-visualisation-toolbox-livt (accessed on 13 August 2018).
- Lasaponara, R.; Leucci, G.; Masini, N.; Persico, R.; Scardozzi, G. Towards an operative use of remote sensing for exploring the past using satellite data: The case study of Hierapolis (Turkey). Remote Sens. Environ. 2016, 174, 148–164. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.-S. Digital Image Enhancement and Noise Filtering by Use of Local Statistics. IEEE Trans. Pattern Anal. Mach. Intell. 1980, 2, 165–168. [Google Scholar] [CrossRef] [PubMed]
- Lasaponara, R.; Masini, N. Space-Based Identification of Archaeological Illegal Excavations and a New Automatic Method for Looting Feature Extraction in Desert Areas. Surv. Geophys. 2018. [Google Scholar] [CrossRef]
- Anselin, L. Local Indicators of Spatial Association LISA. Geogr. Anal. 1995, 27, 93–115. [Google Scholar] [CrossRef]
- Ball, G.H.; Hall, D.J. ISODATA, a Novel Method of Data Analysis and Pattern Classification; Stanford Research Institute: Menlo Park, CA, USA, 1965. [Google Scholar]
- Masini, N. Dai Normanni agli Angioini: Castelli e Fortificazioni della Basilicata; Storia della Basilicata. Il Medioevo; Fonseca, C.D., Ed.; Editori Laterza: Roma, Italy, 2006; pp. 689–753. ISBN 8842075094. [Google Scholar]
- Lasaponara, R.; Masini, N. QuickBird-based analysis for the spatial characterization of archaeological sites: Case study of the Monte Serico Medioeval village. Geophys. Res. Lett. 2005, 32, L12313. [Google Scholar] [CrossRef]
- Haseloff, A. Die Bauten der Hohenstaufen in Unteritalien; KW Hiersemann: Leipzig, Germany, 1920. [Google Scholar]
- Lipo, C.P.; Sanger, M.; Davis, D. Automated mound detection using LiDAR and object-based image analysis in Beaufort County, SC. Southeast. Archaeol. 2018, 37. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Terrain Angle (°) | Iteration Angle (°) | Iteration Distance (m) | Maximum Edge (m) |
|---|---|---|---|---|
| value | 88 | 10 | 1 | 3.5 |
| xi | LxiFM (mt) | µiPC | µiLRM | µSVF | µiASVF | µOpen | µSlope | GDV | GDR | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| µxi = LxiFDM/LxiFM | |||||||||||
| City walls | w1.1 | 148 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | Y | m, sb | |
| w1.2 | 148 | 0.73 | 0.95 | 1.00 | 1.00 | 1.00 | 1.00 | Y | m, sb | ||
| w1.3 | 30 | 0.75 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | N | |||
| w1.4 | 26 | 0.37 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | N | |||
| w2 | 117 | 0.96 | 0.84 | 0.91 | 0.90 | 0.91 | 0.64 | Y | w, sb, m | ||
| ΣLwi | 469 | µLDM | 0.85 | 0.95 | 0.98 | 0.97 | 0.98 | 0.91 | |||
| ΣLwi′ | 413 | µLDM′ | 0.89 | 0.94 | 0.97 | 0.97 | 0.98 | 0.90 | |||
| Small microrelief attributed to Buildings | b1 | 25 | 0.00 | 0.00 | 1.00 | 1.00 | 1.00 | 0.22 | N | ||
| b2 | 38 | 0.98 | 0.57 | 1.00 | 1.00 | 1.00 | 0.48 | N | |||
| b3 | 16 | 0.41 | 0.16 | 1.00 | 1.00 | 1.00 | 0.49 | N | |||
| b4 | 39 | 0.50 | 0.00 | 1.00 | 1.00 | 1.00 | 0.65 | N | |||
| b5 | 73 | 0.86 | 0.25 | 0.67 | 0.67 | 1.00 | 0.46 | N | |||
| b6 | 25 | 0.11 | 0.25 | 1.00 | 1.00 | 1.00 | 0.05 | N | |||
| b7 | 60 | 0.06 | 0.59 | 1.00 | 1.00 | 1.00 | 0.78 | N | |||
| b8 | 37 | 0.00 | 0.00 | 1.00 | 1.00 | 1.00 | 0.24 | Y | sb | ||
| b9 | 69 | 0.95 | 0.56 | 0.90 | 0.81 | 1.00 | 0.94 | N | |||
| b10 | 39 | 0.05 | 0.00 | 0.83 | 0.83 | 1.00 | 0.00 | N | |||
| b11 | 85 | 0.70 | 0.63 | 0.94 | 0.94 | 1.00 | 0.33 | Y | sb | ||
| b12 | 45 | 0.08 | 0.00 | 0.95 | 0.95 | 1.00 | 0.00 | N | |||
| b13 | 130 | 0.60 | 0.00 | 1.00 | 1.00 | 1.00 | 0.53 | N | |||
| b14 | 116 | 0.98 | 0.71 | 1.00 | 1.00 | 1.00 | 1.00 | Y | m, sb | ||
| b15 | 58 | 1.00 | 0.90 | 1.00 | 1.00 | 1.00 | 1.00 | Y | m, sb | ||
| ΣLbi | 855 | µLDM | 0.66 | 0.40 | 0.97 | 0.97 | 1.00 | 0.57 | |||
| ΣLbi’ | 296 | µLDM′ | 0.89 | 0.73 | 0.98 | 0.98 | 1.00 | 0.78 | |||
| Castle | c1 | 60 | 0.60 | 0.70 | 1.00 | 1.00 | 1.00 | 0.65 | Y | w, m, sb | |
| c2 | 65 | 0.60 | 0.80 | 1.00 | 1.00 | 1.00 | 0.80 | Y | w, sb | ||
| c3 | 58 | 0.45 | 0.68 | 1.00 | 1.00 | 1.00 | 0.80 | Y | w, m, sb | ||
| c4 | 39 | 0.50 | 0.65 | 1.00 | 1.00 | 1.00 | 0.70 | Y | w, sb | ||
| Lc = Lc’ | 222 | µLDM = µLDM′ | 0.54 | 0.72 | 1 | 1 | 1 | 0.74 | |||
| Other features of potential archaeological interest | O1 | 97 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | N | ||
| O2 | 69 | 0.69 | 0.80 | 1.00 | 1.00 | 1.00 | 0.75 | N | |||
| O3 | 40 | 0.85 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | Y | sb | ||
| O4 | 112 | 0.14 | 0.74 | 1.00 | 1.00 | 1.00 | 0.58 | Y | sb | ||
| O5 | 50 | 0.00 | 0.35 | 0.69 | 1.00 | 0.75 | 0.73 | N | |||
| O6 | 34 | 0.77 | 0.85 | 1.00 | 1.00 | 1.00 | 0.78 | Y | sb | ||
| O7 | 33 | 0.50 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | Y | sb | ||
| O8 | 68 | 0.50 | 0.80 | 1.00 | 1.00 | 1.00 | 1.00 | N | |||
| O9 | 82 | 0.45 | 0.63 | 1.00 | 0.96 | 1.00 | 0.44 | N | |||
| ΣLoi | 585 | µLDM | 0.53 | 0.79 | 0.97 | 0.99 | 0.98 | 0.77 | |||
| ΣLoi’ | 107 | µLDM′ | 0.72 | 0.95 | 1.00 | 1.00 | 1.00 | 0.93 | |||
| AFE Applied to Positive Openness | AFE Applied to SVF | ||||
|---|---|---|---|---|---|
| Total Length (mt) | Features Detected (mt; %) | Features Detected (mt; %) | |||
| City walls | 469 | 438 | 93% | 454 | 97% |
| Castle | 222 | 190 | 86% | 184 | 83% |
| Buildings | 855 | 119 | 14% | 32 | 4% |
| OAF | 585 | 196 | 34% | 117 | 20% |
| Total length | 2131 | ||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masini, N.; Gizzi, F.T.; Biscione, M.; Fundone, V.; Sedile, M.; Sileo, M.; Pecci, A.; Lacovara, B.; Lasaponara, R. Medieval Archaeology Under the Canopy with LiDAR. The (Re)Discovery of a Medieval Fortified Settlement in Southern Italy. Remote Sens. 2018, 10, 1598. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10101598
Masini N, Gizzi FT, Biscione M, Fundone V, Sedile M, Sileo M, Pecci A, Lacovara B, Lasaponara R. Medieval Archaeology Under the Canopy with LiDAR. The (Re)Discovery of a Medieval Fortified Settlement in Southern Italy. Remote Sensing. 2018; 10(10):1598. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10101598
Chicago/Turabian StyleMasini, Nicola, Fabrizio Terenzio Gizzi, Marilisa Biscione, Vincenzo Fundone, Michele Sedile, Maria Sileo, Antonio Pecci, Biagio Lacovara, and Rosa Lasaponara. 2018. "Medieval Archaeology Under the Canopy with LiDAR. The (Re)Discovery of a Medieval Fortified Settlement in Southern Italy" Remote Sensing 10, no. 10: 1598. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10101598