Integration of Corner Reflectors for the Monitoring of Mountain Glacier Areas with Sentinel-1 Time Series

 , ,
, ,
Abstract
:
1. Introduction
2. Radar Cross-Section
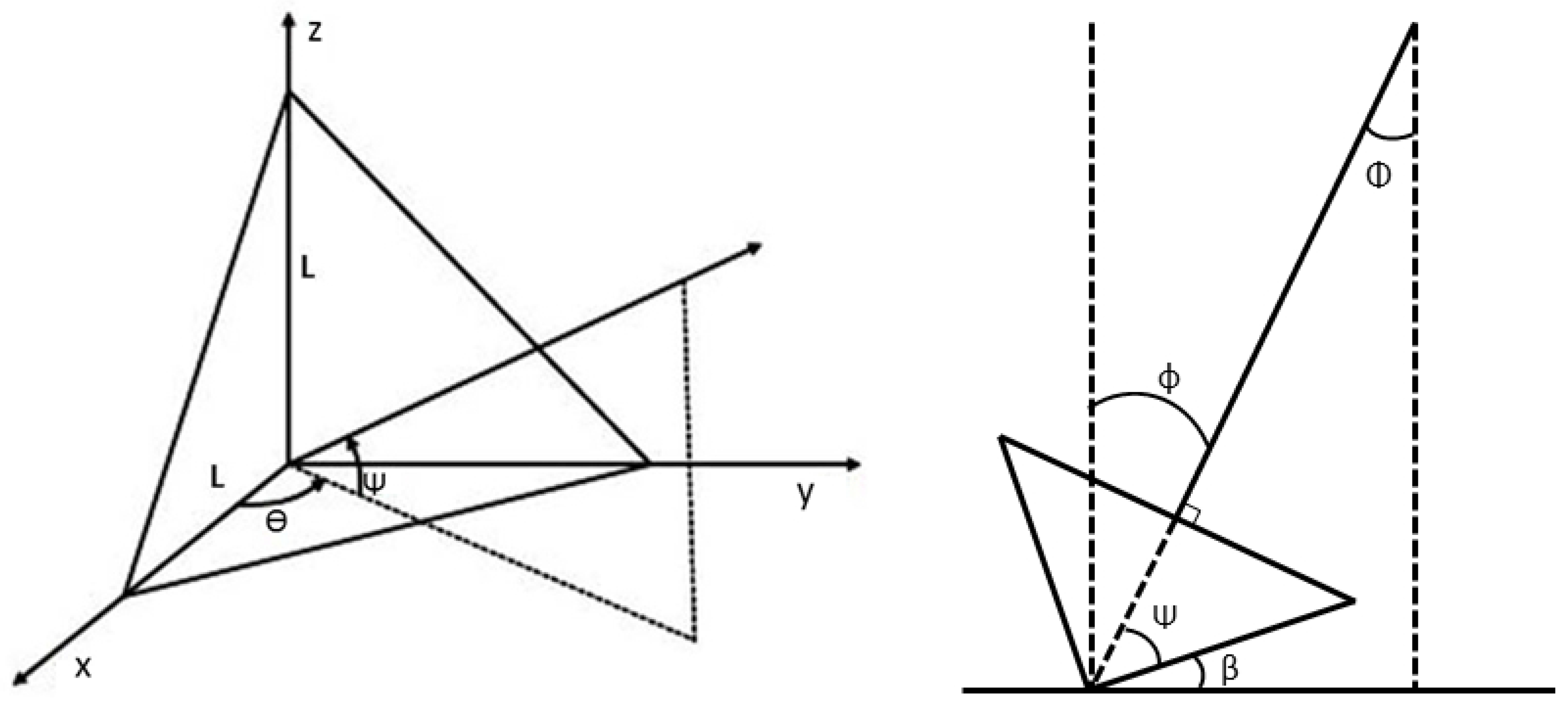
2.1. Theoretical Estimation from Geometrical Optics
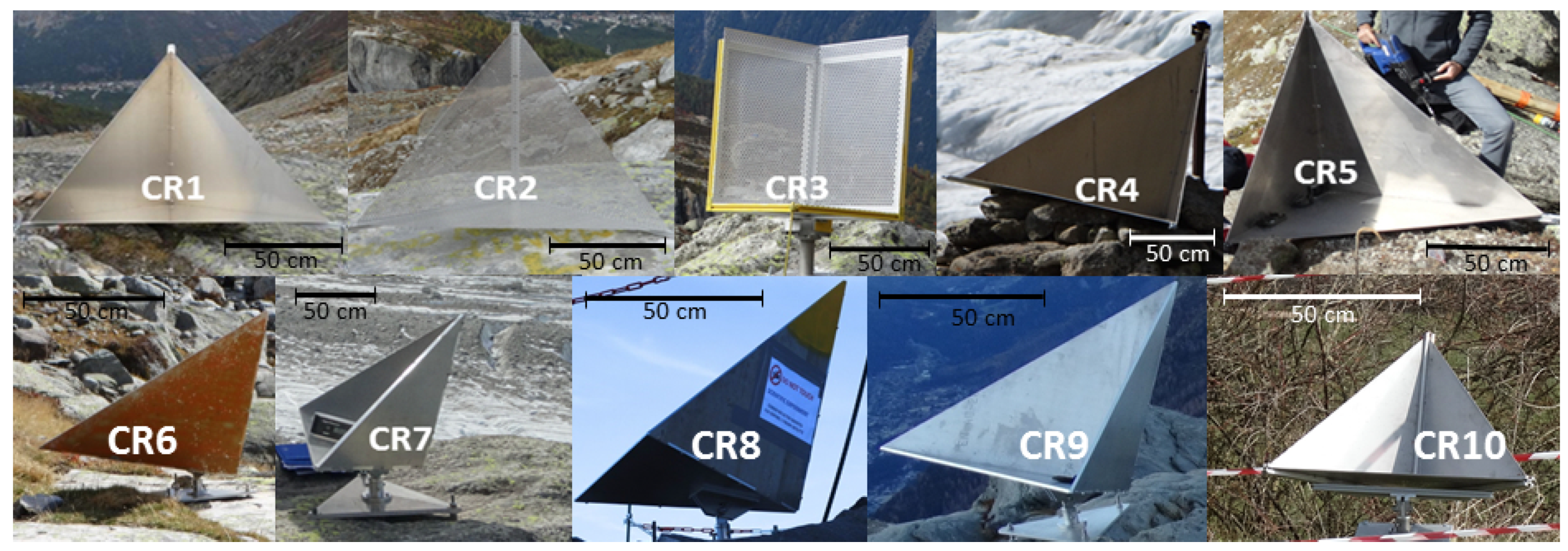
2.1.1. Triangular Trihedral Corner Reflectors
2.1.2. Rectangular Trihedral Corner Reflectors
2.1.3. Perforated Corner Reflectors
2.2. Measurements in an Anechoic Chamber
2.2.1. Principles of RCS Estimation
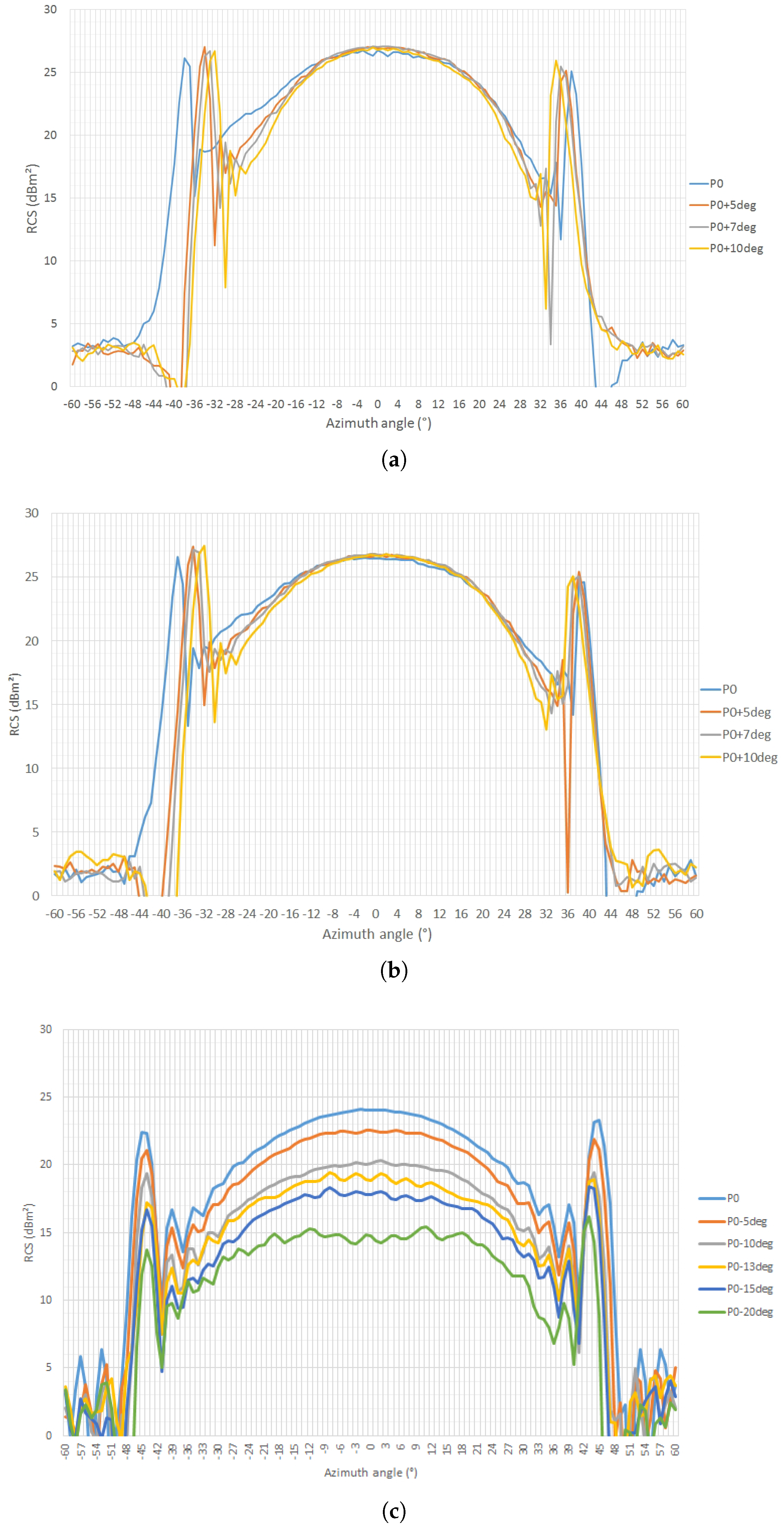
2.2.2. Results of RCS Peak Estimation
2.2.3. Discussions
2.2.4. Setting Angle Sensitivity
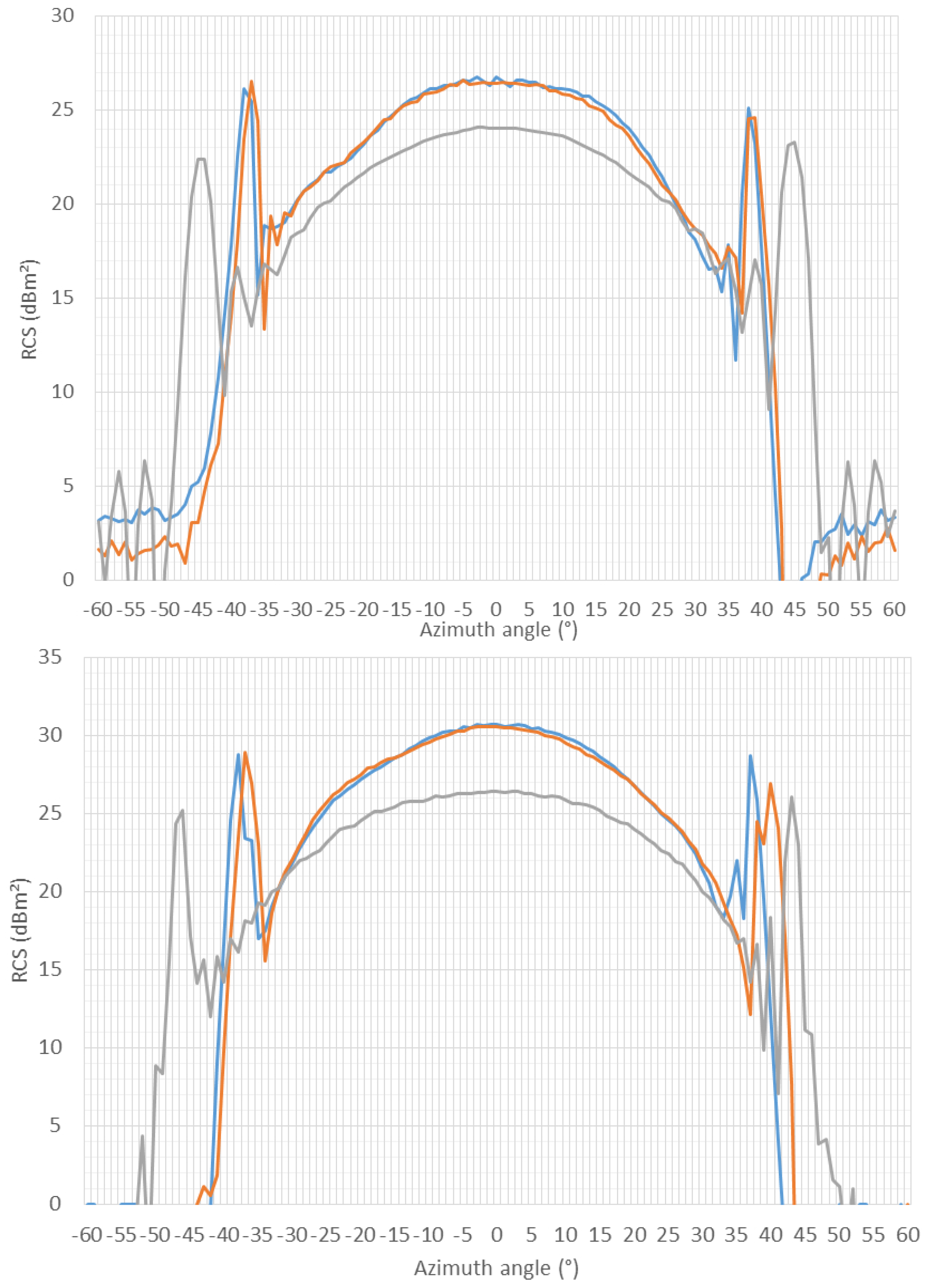
2.2.5. RCS Performance Comparison between C-Band and X-Band
3. Responses of Corner Reflectors in Sentinel-1 Data
3.1. Visibility in Low Backscattering Areas
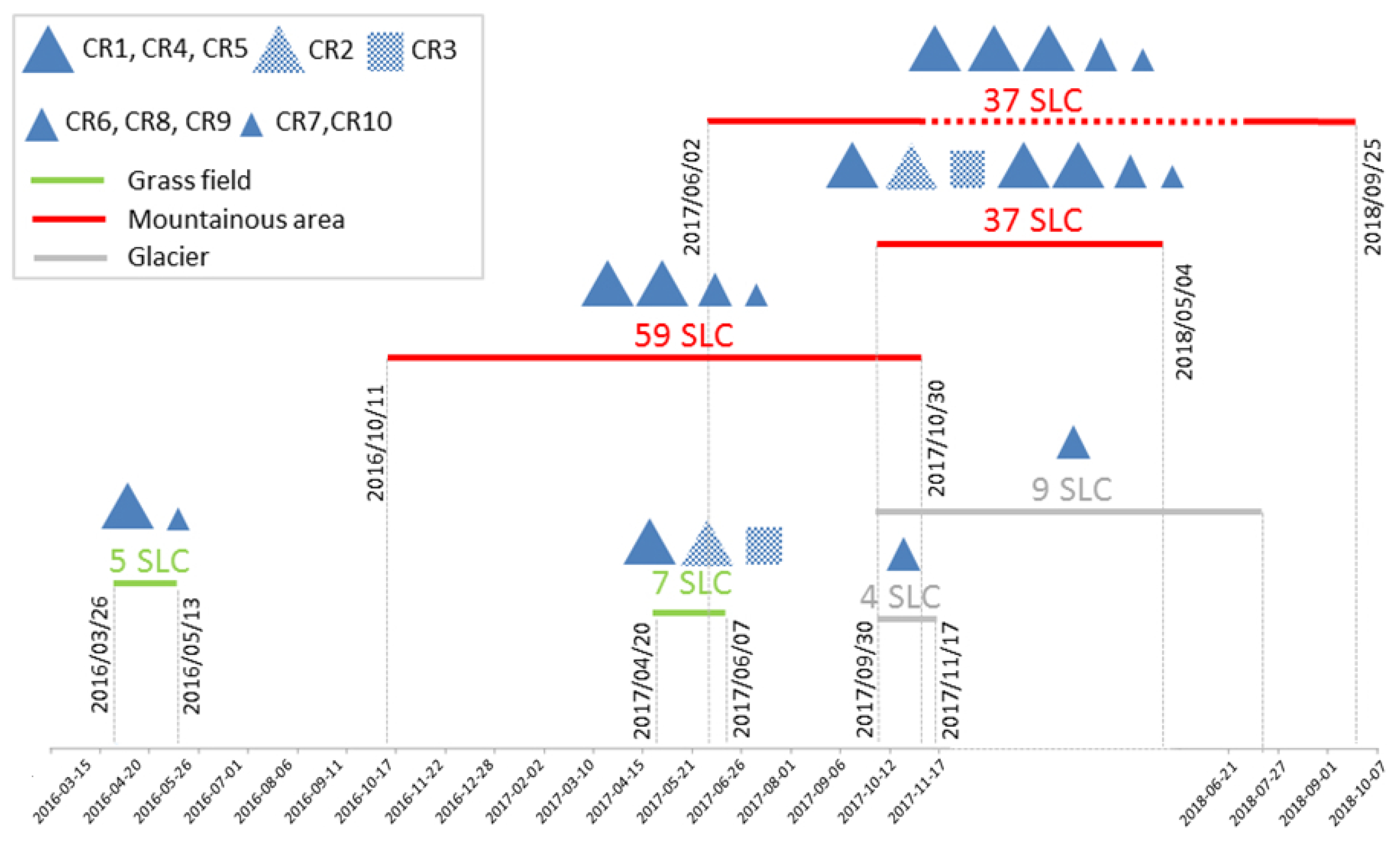
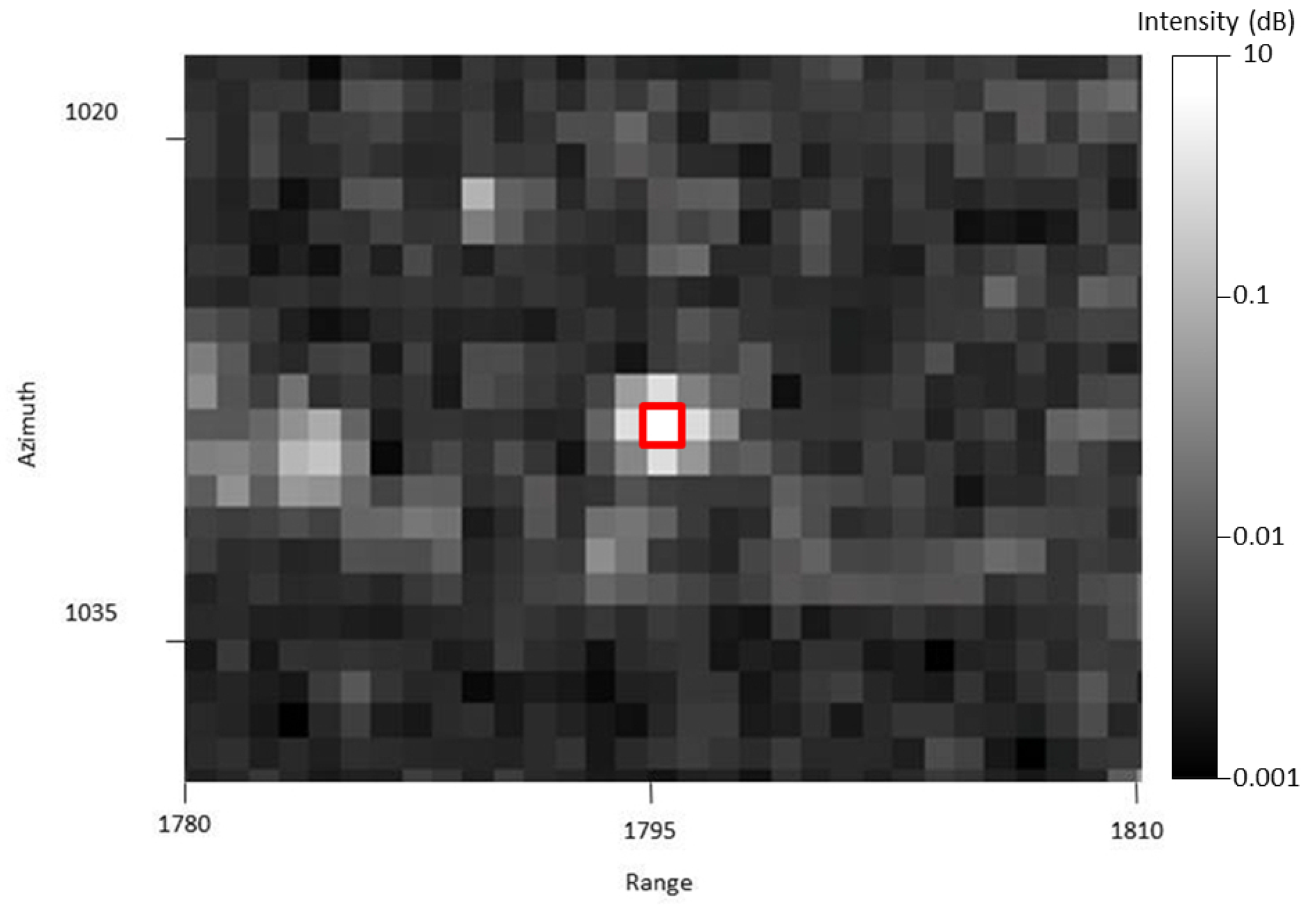
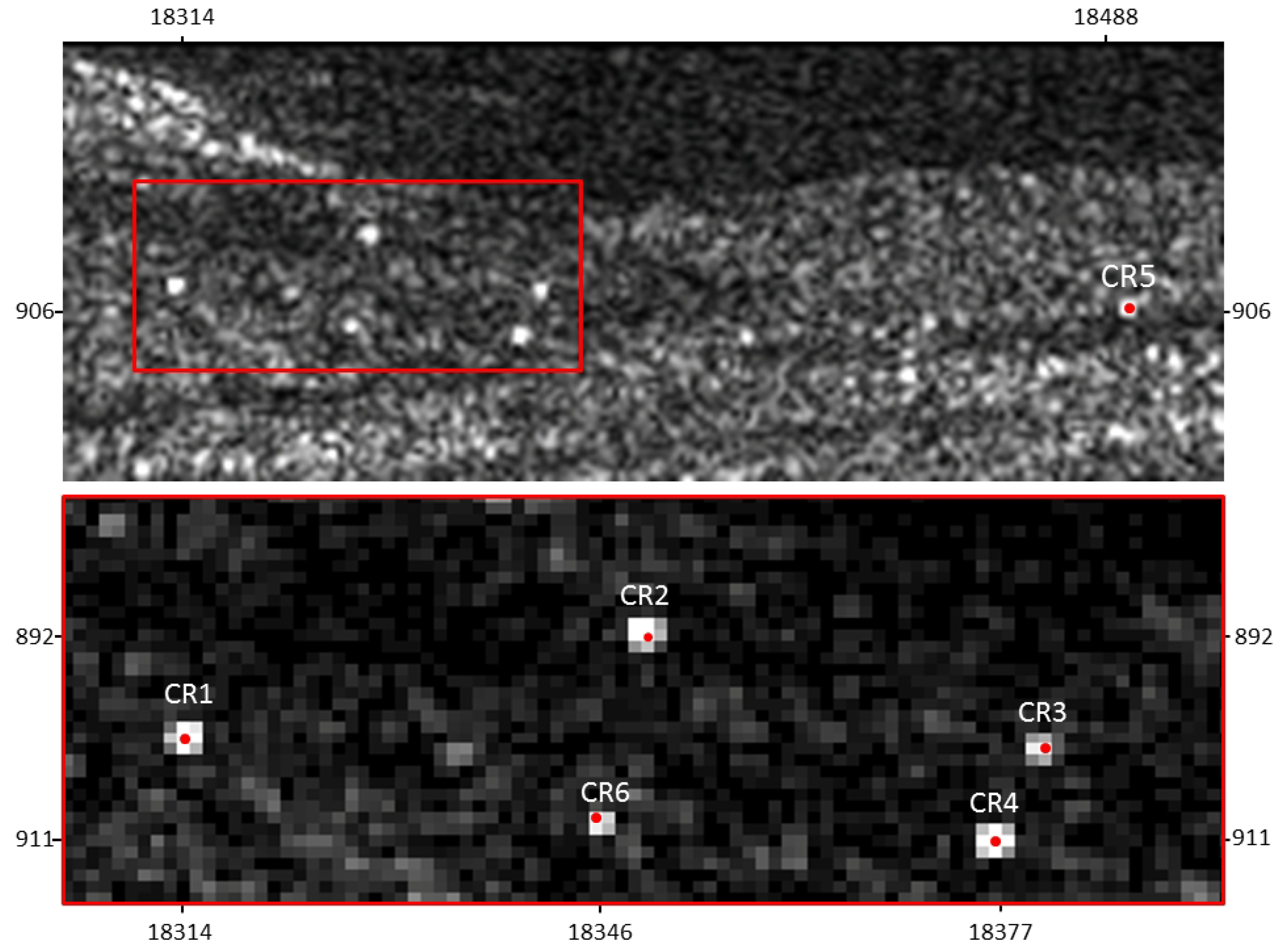
3.1.1. Identification of CRs
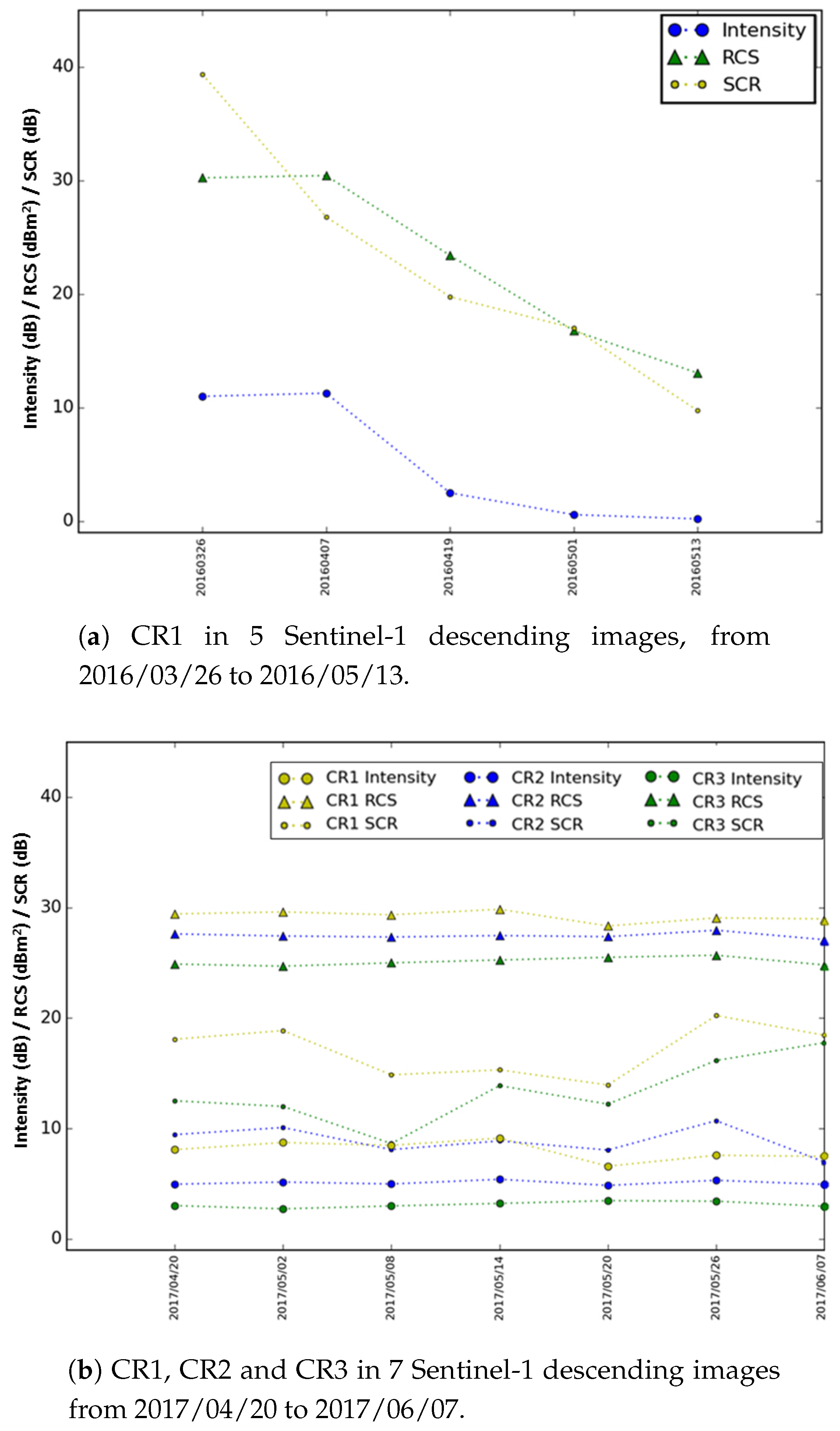
3.1.2. Signal-to-Clutter Ratio and Intensity Time Series
3.2. Integration of Crs in High Relief Areas
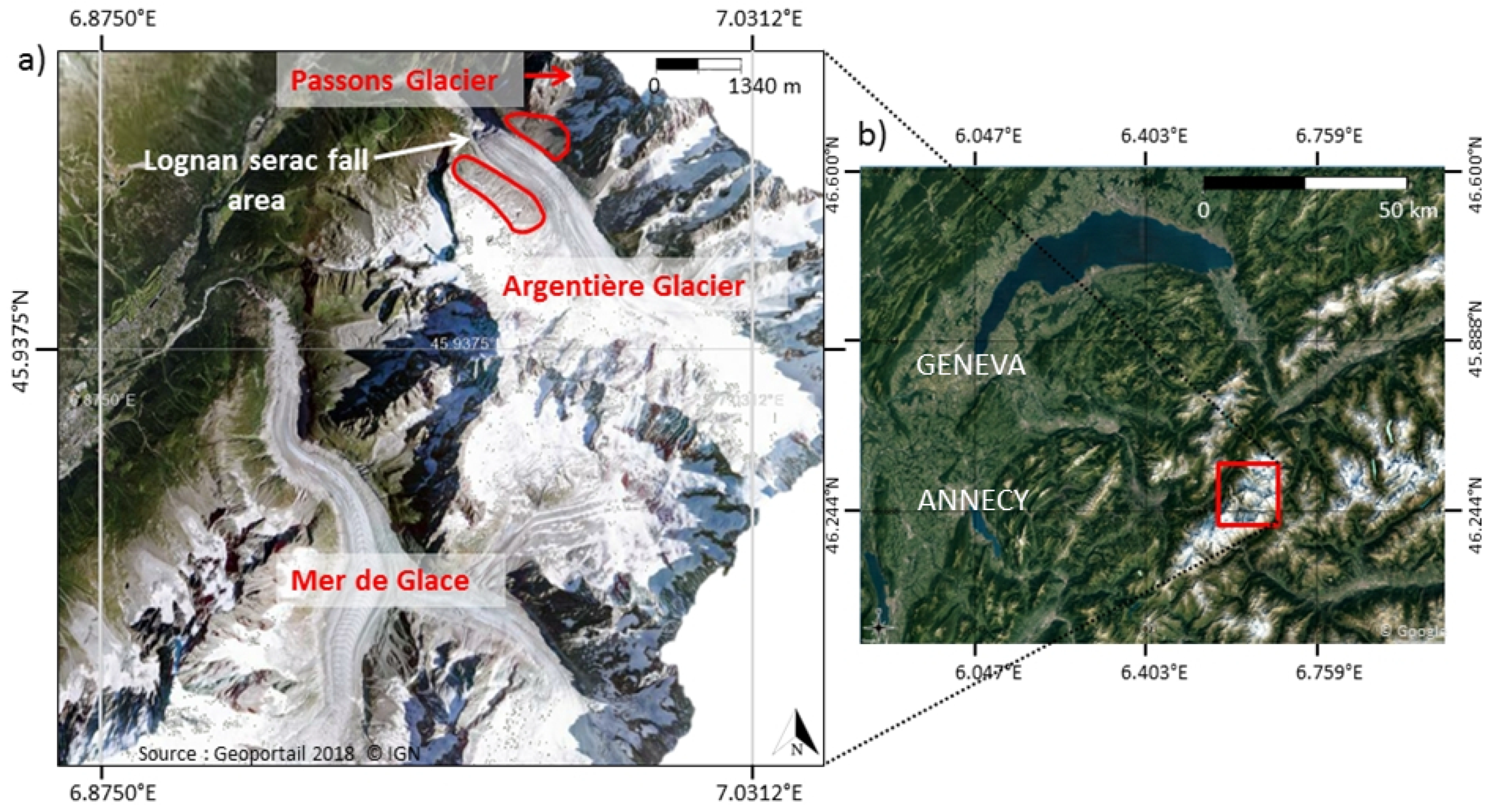
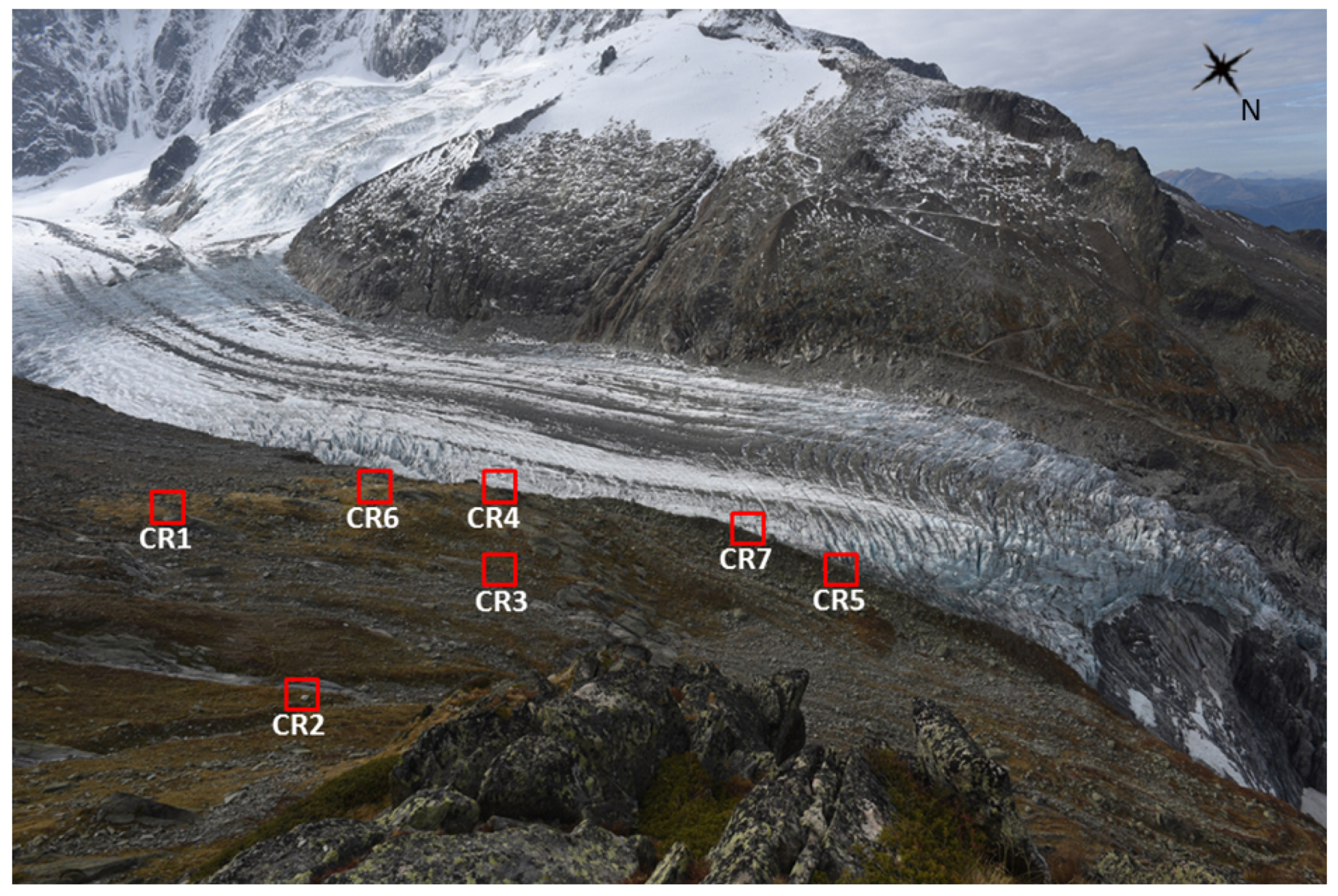
3.2.1. Chamonix–Mont-Blanc Test Site
3.2.2. Identification of CR Pixels
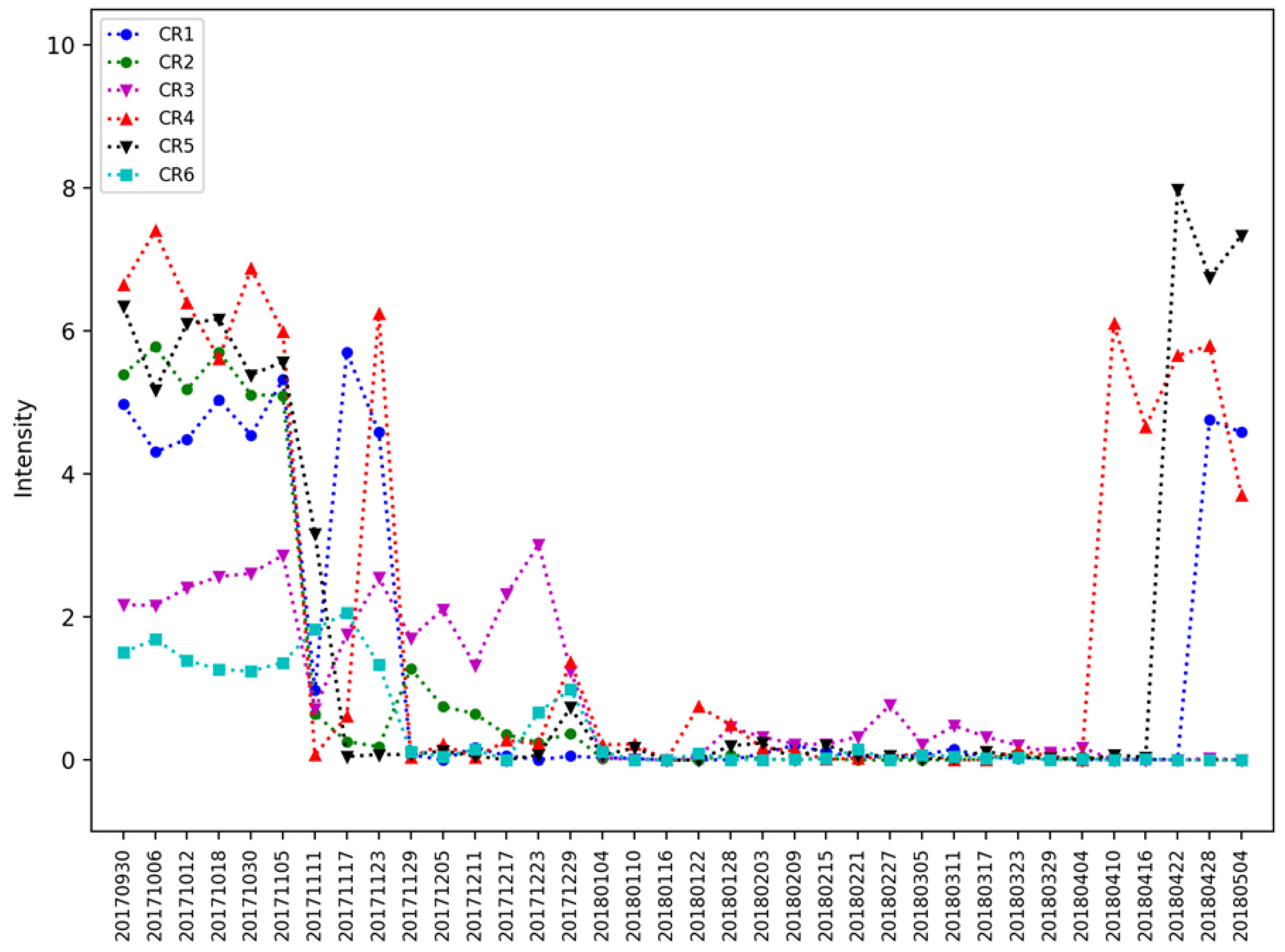
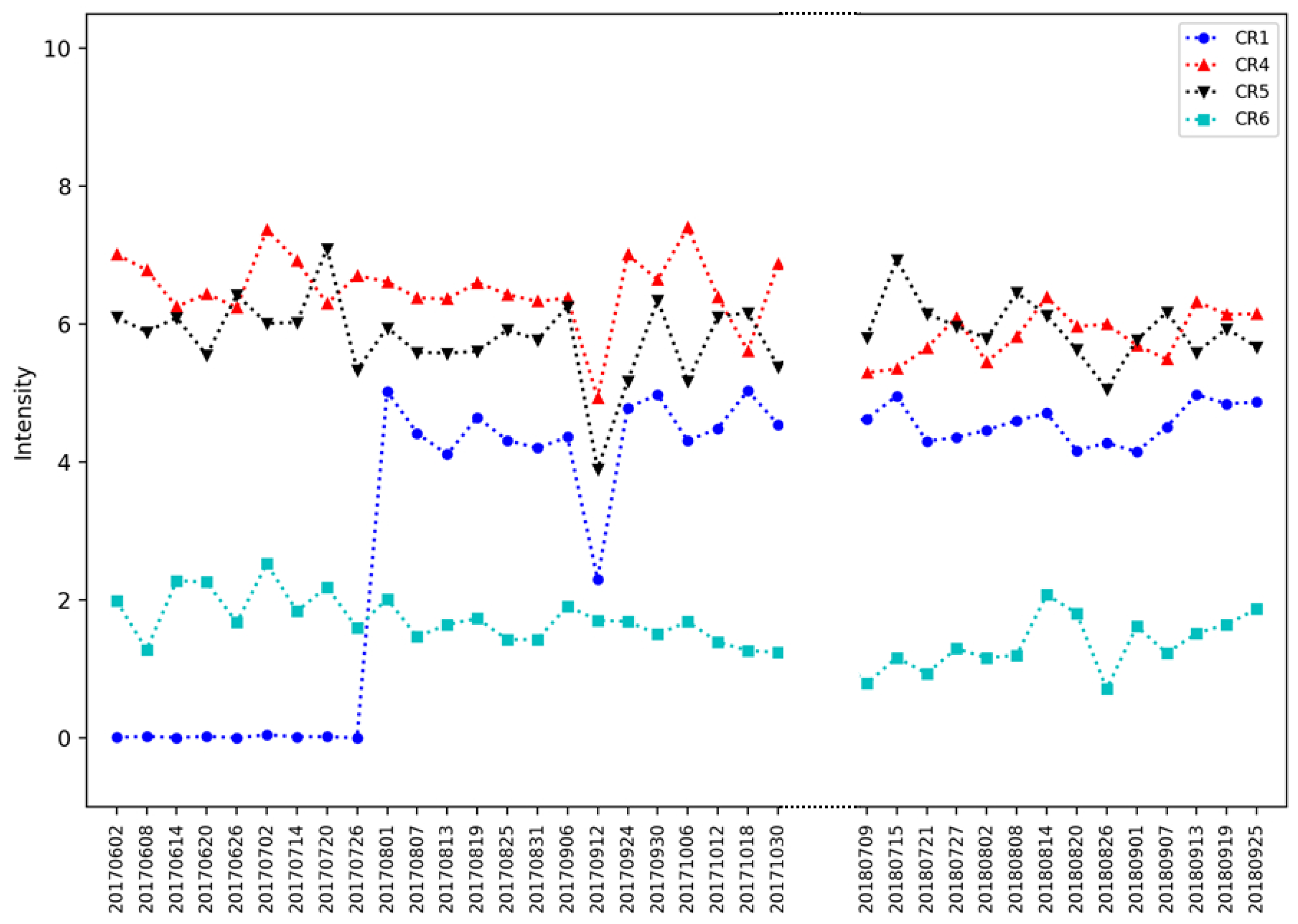
3.2.3. Intensity Analysis
3.2.4. Stability Analysis
3.2.5. Signal-to-Clutter Ratio and RCS
4. CRs for Glacier and Moraine Monitoring
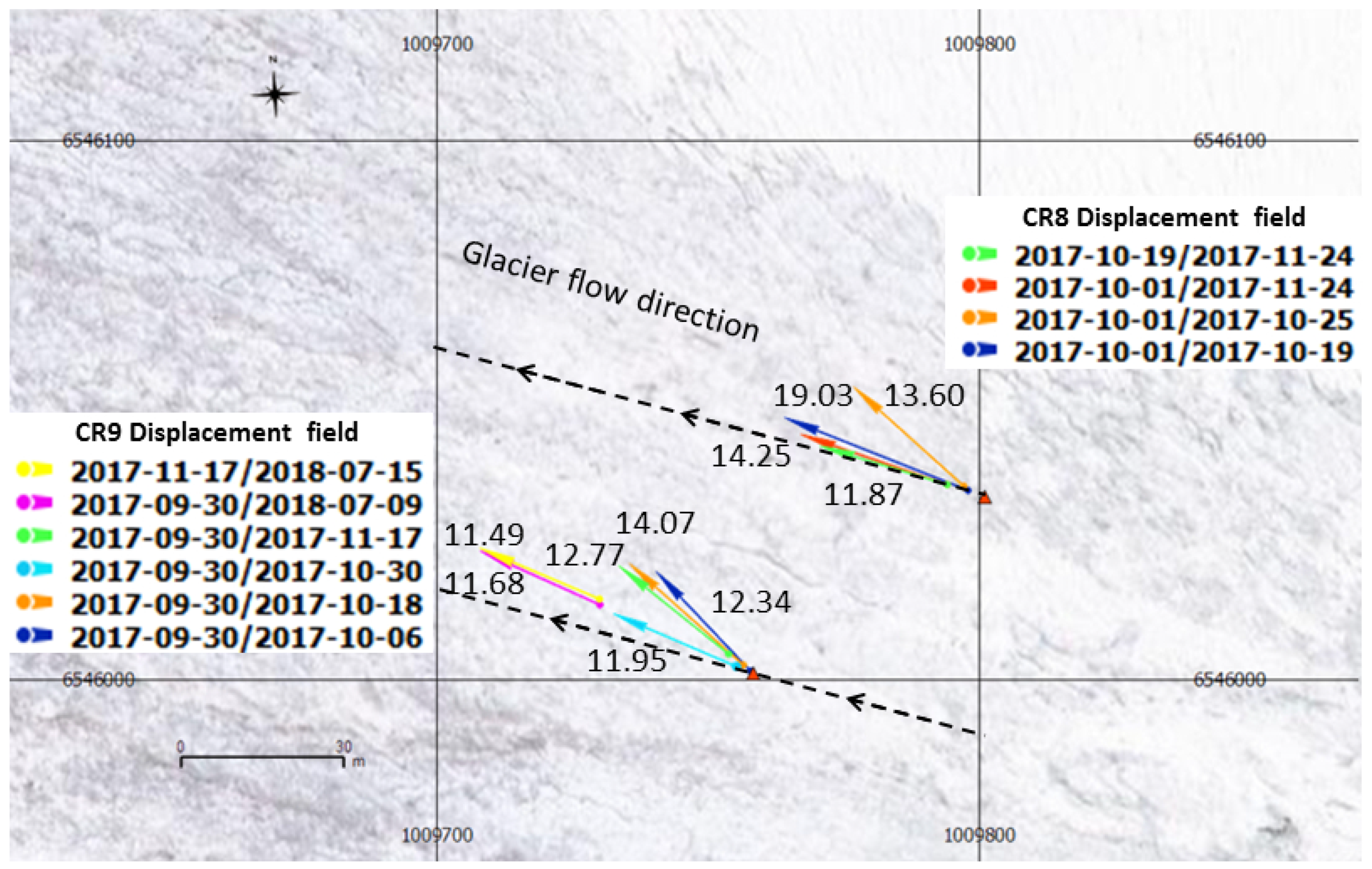
4.1. Use of CR Location for Glacier Motion Estimation
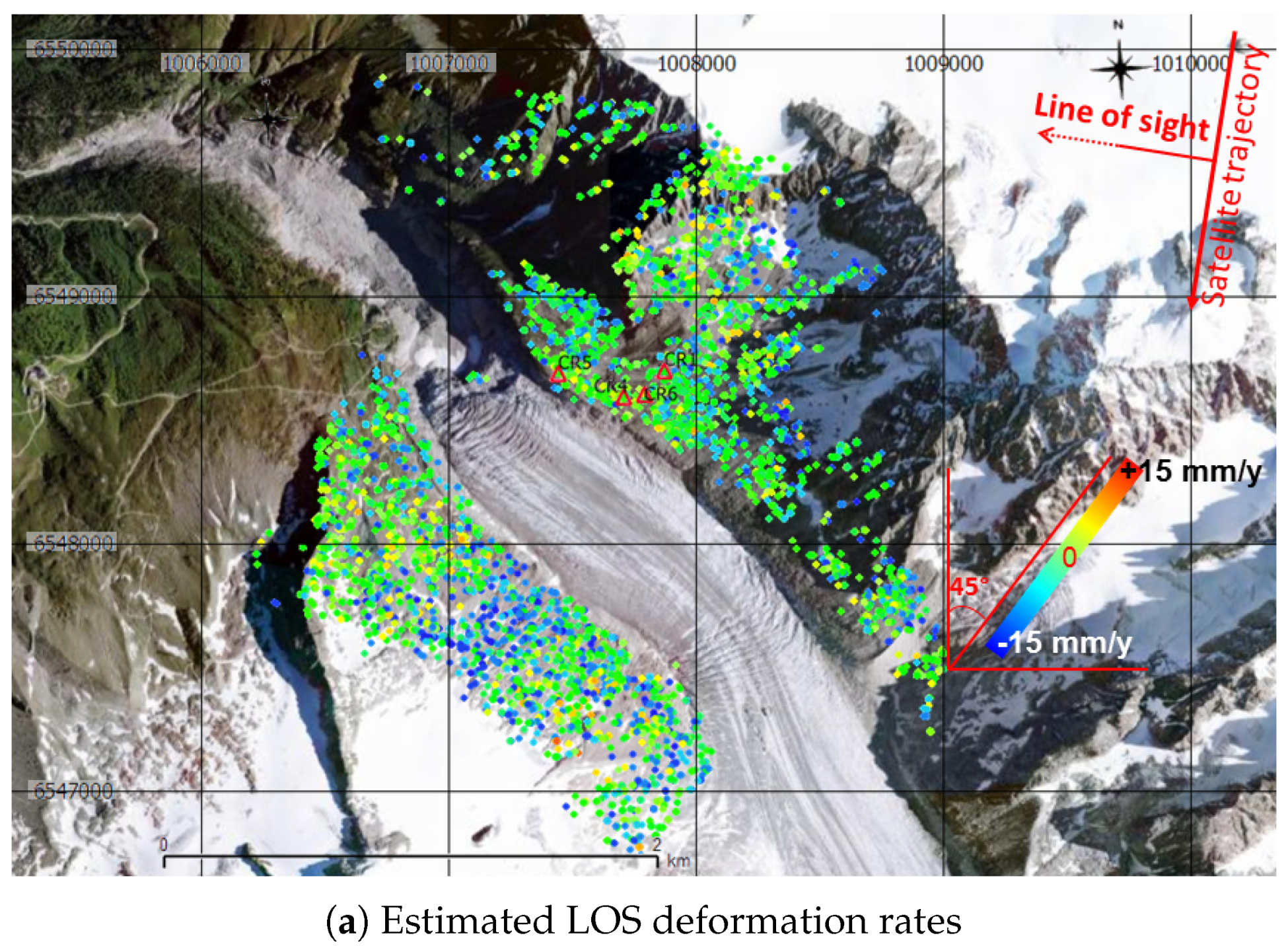
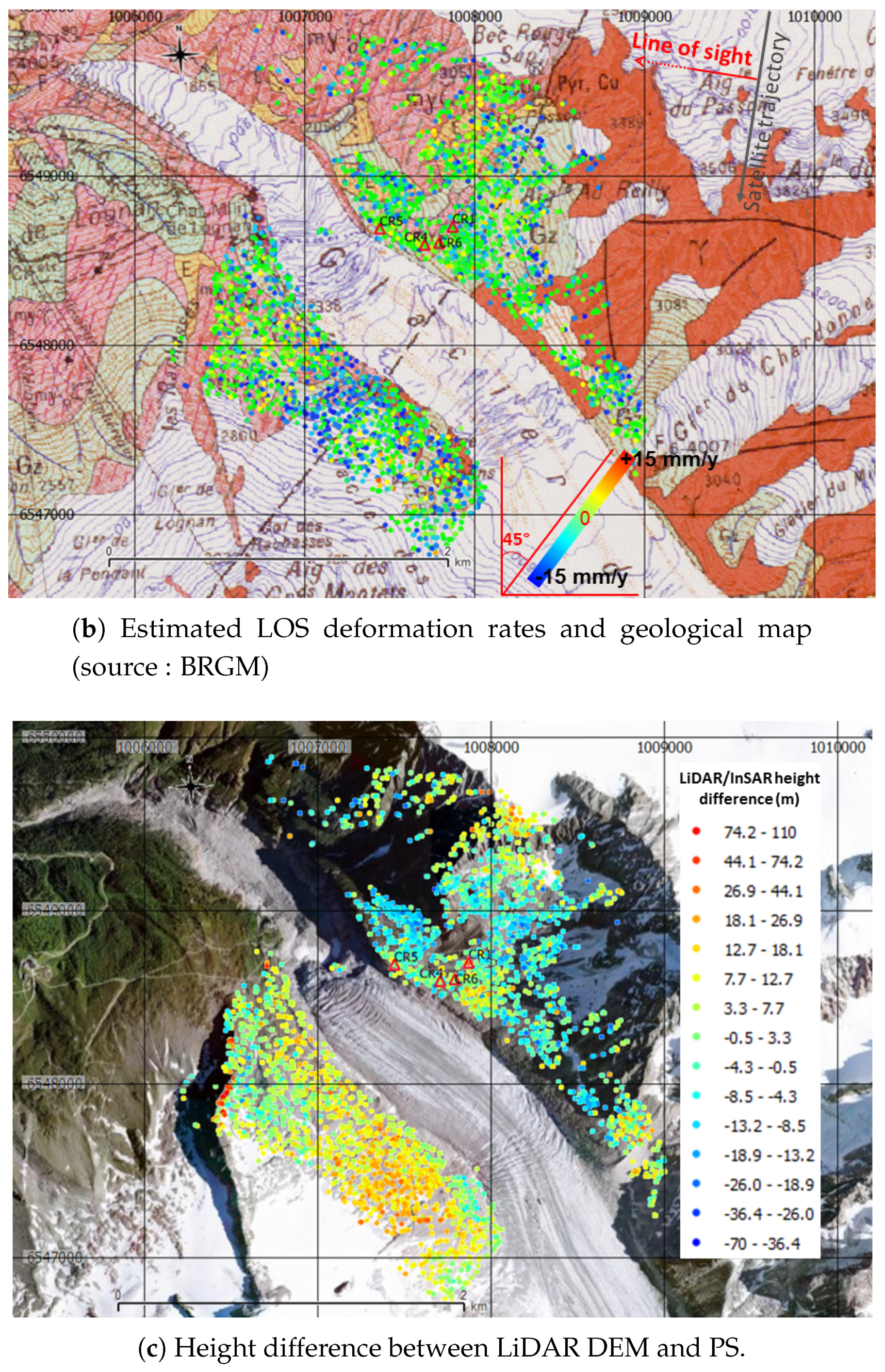
4.2. Joint Use of Crs and Psi Strategy for Estimating Moraine and Slopes Stability
4.2.1. Data Selection
4.2.2. Radar Processing
4.2.3. Validation Method of Height Correction
4.2.4. Absolute Location Error
4.2.5. Processing Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Joughin, I.; Smith, B.E.; Abdalati, W. Glaciological advances made with interferometric synthetic aperture radar. J. Glaciol. 2010, 56, 1026–1042. [Google Scholar] [CrossRef]
- Barboux, C.; Strozzi, T.; Delaloye, R.; Wegmüller, U.; Collet, C. Mapping slope movements in Alpine environments using TerraSAR-X interferometric methods. ISPRS J. Photogramm. Remote Sens. 2015, 109, 178–192. [Google Scholar] [CrossRef] [Green Version]
- Sarabandi, K.; Tsen-Chieh, C. Optimum corner reflectors for calibration of imaging radars. IEEE Trans. Antennas Propag. 1996, 44, 1348–1361. [Google Scholar] [CrossRef]
- Garthwaite, M. On the Design of Radar Corner Reflectors for Deformation Monitoring in Multi-Frequency InSAR. Remote Sens. 2017, 9, 648. [Google Scholar] [CrossRef]
- Groot, J.; Otten, M. SAR Imaging of Corner Reflectors Larger Than the Spatial Resolution. IEEE Trans. Geosci. Remote Sens. 1994, 32, 721–724. [Google Scholar] [CrossRef]
- Parker, A.L.; Featherstone, W.E.; Penna, N.T.; Filmer, M.S.; Garthwaite, M.C. Practical Considerations before Installing Ground-Based Geodetic Infrastructure for Integrated InSAR and cGNSS Monitoring of Vertical Land Motion. Sensors 2017, 17, 1753. [Google Scholar] [CrossRef]
- Freeman, A. SAR calibration: An overview. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1107–1121. [Google Scholar] [CrossRef]
- Doöring, B.; Schrank, D.; Schwerdt, M.; Bauer, R. Absolute Radiometric Calibration of TerraSAR-X—Approach and Ground Targets. In German Microwave Conference; VDE: Berlin, Germany, 2008; pp. 1–4. [Google Scholar]
- Bovenga, F.; Pasquariello, G.; Pellicani, R.; Refice, A.; Spilotro, G. Landslide monitoring for risk mitigation by using corner reflector and satellite SAR interferometry: The large landslide of Carlantino (Italy). CATENA 2017, 151, 49–62. [Google Scholar] [CrossRef]
- Schlögel, R.; Thiebes, B.; Mulas, M.; Cuozzo, G.; Notarnicola, C.; Schneiderbauer, S.; Crespi, M.; Mazzoni, A.; Mair, V.; Corsini, A. Multi-Temporal X-Band Radar Interferometry Using Corner Reflectors: Application and Validation at the Corvara Landslide (Dolomites, Italy). Remote Sens. 2017, 9, 739. [Google Scholar] [CrossRef]
- Qin, Y.; Perissin, D. Monitoring Ground Subsidence in Hong Kong via Spaceborne Radar: Experiments and Validation. Remote Sens. 2015, 7, 10715–10736. [Google Scholar] [CrossRef] [Green Version]
- Rohmer, J.; Loschetter, A.; Raucoules, D.; de Michele, M.; Raffard, D.; Le Gallo, Y. Revealing the surface deformation induced by deep CO2 injection in vegetated/agricultural areas: The combination of corner-reflectors, reservoir simulations and spatio-temporal statistics. Eng. Geol. 2015, 197, 188–197. [Google Scholar] [CrossRef]
- Trouvé, E.; Pétillot, I.; Bolon, P.; Bombrun, L.; Cotte, N.; Hajnsek, I. Monitoring Alpine glacier activity by a combined use of TerraSAR-X images and continuous GPS measurements—The Argentière glacier experiment. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008. [Google Scholar]
- Zhu, W.; Zhang, Q.; Ding, X.; Zhao, C.; Yang, C.; Qu, F.; Qu, W. Landslide monitoring by combining of CR-InSAR and GPS techniques. Adv. Space Res. 2014, 53, 430–439. [Google Scholar] [CrossRef]
- Algafsh, A.; Inggs, M.; Mishra, A.K. The effect of perforating the corner reflector on maximum radar cross section. In Proceedings of the 2016 16th Mediterranean Microwave Symposium (MMS), Abu Dhabi, UAE, 14–16 November 2016; pp. 1–4. [Google Scholar]
- Parizzi, A.; Perissin, D.; Prati, C.; Rocca, F. Artificial Scatterers for SAR Interferometry. In Proceedings of the 2005 Dragon Symposium (SP-611), Santorini, Greece, 29 June–1 July 2005; Volume 46, p. 27. [Google Scholar]
- Qin, Y.; Perissin, D.; Lei, L. The Design and Experiments on Corner Reflectors for Urban Ground Deformation Monitoring in Hong Kong. Int. J. Antennas Propag. 2013, 2013, 1–8. [Google Scholar] [CrossRef]
- Garthwaite, M.C.; Lawrie, S.; Dawson, J.; Thankappan, M. Corner Reflectors as the Tie Between InSAR and GNSS Measurements: Case Study of Resource Extraction in Australia. FRINGE 2015, 731. [Google Scholar] [CrossRef]
- Gray, A.; Vachon, P.; Livingstone, C.; Lukowski, T. Synthetic aperture radar calibration using reference reflectors. IEEE Trans. Geosci. Remote Sens. 1990, 28, 374–383. [Google Scholar] [CrossRef]
- Polycarpou, A.C.; Balanis, C.A.; Tirkas, P.A. Radar Cross Section of Trihedral Corner Reflectors: Theory and Experiment. Electromagnetics 1995, 15, 457–484. [Google Scholar] [CrossRef]
- Ruck, G.T.; Barrick, D.E.; Stuart, W.D.; Krichbaum, C.K. Radar Cross Section Handbook; Plenum Press: New York, NY, USA, 1970; Volumes 1 & 2. [Google Scholar]
- Doerry, A.W. Reflectors for SAR Performance Testing; Sandia Report, SAND2008-0396; Sandia National Laboratories: Albuquerque, CA, USA, 2008.
- Doerry, A.W.; Brock, B.C. Radar Cross Section of Triangular Trihedral Reflector with Extended Bottom Plate; Sandia Report, SAND2009-2993; Sandia National Laboratories: Albuquerque, CA, USA, 2009.
- Zhou, Z.; Yan, H.; Yin, H. High Frequency RCS Representation of Trihedral Corner Reflectors with Scalene Triangle Aperture. In Proceedings of the 2015 IEEE 12th International Conference on Ubiquitous Intelligence and Computing and 2015 IEEE 12th International Conference on Autonomic and Trusted Computing and 2015 IEEE 15th International Conference on Scalable Computing and Communications and Its Associated Workshops (UIC-ATC-ScalCom), Beijing, China, 10–14 August 2015; pp. 1621–1625. [Google Scholar]
- Chuah, B.K.C.H.T. Modeling of RF absorber for application in the design of anechoic chamber. Prog. Electromag. Res. 2003, 43, 273–285. [Google Scholar]
- Dun, G. Modelisation et optimisation de chambres anechoiques pour applications CEM. Ph.D. Thesis, ENSTB, Université de Bretagne occidentale, Brest, France, 2007. [Google Scholar]
- Zink, M.; Kietzmann, H. Next Generation SAR—External Calibration; German Aerospace Center (DLR): Köln, Germany, 1995; p. 45. [Google Scholar]
- Robertson, S.D. Targets for Microwave Radar Navigation. Bell Syst. Tech. J. 1947, 26, 852–869. [Google Scholar] [CrossRef]
- Guillemot, T.; Pottier, E.; Saillard, J.; Levrel, J.; Lebreton, E. Determining the far-field RCS from the response to a cylindrical wavefront. Aerosp. Sci. Technol. 1997, 1, 215–223. [Google Scholar] [CrossRef]
- Knott, E.F. Radar Cross Section Measurements; VanNostrand Reinhold: New York, NY, USA, 1993. [Google Scholar]
- Schneider, R.; Papathanassiou, K.; Hajnsek, I.; Moreira, A. Polarimetric and interferometric characterization of coherent scatterers in urban areas. IEEE Trans. Geosci. Remote Sens. 2006, 44, 971–984. [Google Scholar] [CrossRef]
- Henry, C.; Souyris, J.; Marthon, P. Target detection and analysis based on spectral analysis of a SAR image: A simulation approach. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; Volume 3, pp. 2005–2007. [Google Scholar]
- Adam, N.; Kampes, B.E.M. Development of a Scientific Permanent Scatterer System: Modifications for Mixed ERS/Envisat Time Series. In Proceedings of the 2004 Envisat & ERS Symposium (ESA SP-572), Salzburg, Austria, 6–10 September 2004. [Google Scholar]
- Ketelaar, G.; Marinkovic, P.; Hanssen, R. Validation of Point Scatterer Phase Statistics in Multi-Pass INSAR. In Proceedings of the 2004 Envisat & ERS Symposium (ESA SP-572), Salzburg, Austria, 6–10 September 2004. [Google Scholar]
- Rabatel, A.; Letréguilly, A.; Dedieu, J.P.; Eckert, N. Changes in glacier equilibrium-line altitude in the western Alps from 1984 to 2010: Evaluation by remote sensing and modeling of the morpho-topographic and climate controls. Cryosphere 2013, 7, 1455–1471. [Google Scholar] [CrossRef]
- Gardent, M. Glacier Inventory and Retreat of French Alpine Glaciers since the End of Little Ice Age. Ph.D. Thesis, Université de Grenoble, Grenoble, France, 2014. [Google Scholar]
- Le Roy, M.; Nicolussi, K.; Deline, P.; Astrade, L.; Edouard, J.L.; Miramont, C.; Arnaud, F. Calendar-dated glacier variations in the western European Alps during the Neoglacial: The Mer de Glace record, Mont Blanc massif. Quat. Sci. Rev. 2015, 108, 1–22. [Google Scholar] [CrossRef]
- Rabatel, A.; Sanchez, O.; Vincent, C.; Six, D. Estimation of Glacier Thickness From Surface Mass Balance and Ice Flow Velocities: A Case Study on Argentière Glacier, France. Front. Earth Sci. 2018. [Google Scholar] [CrossRef]
- Deline, P.; Gardent, M.; Magnin, F.; Ravanel, L. Morphodynamics of the Mont Blanc massif (European Alps) in a changing cryosphere. In Proceedings of the 9th EGU General Assembly, Vienna, Austria, 22–27 April 2012. [Google Scholar]
- Ravanel, L.; Deline, P.; Lambiel, C.; Duvillard, P. Stability Monitoring of High Alpine Infrastructure by Terrestrial Laser Scanning. IAEG XII Congress. 2014, 1, 169–172. [Google Scholar]
- Magnin, F.; Josnin, J.Y.; Ravanel, L.; Pergaud, J.; Pohl, B.; Deline, P. Modelling rock wall permafrost degradation in the Mont Blanc massif from the LIA to the end of the 21st century. Cryosphere 2017, 11, 1813–1834. [Google Scholar] [CrossRef] [Green Version]
- Blair, R.W. Moraine and Valley Wall Collapse due to Rapid Deglaciation in Mount Cook National Park, New Zealand. Mount. Res. Dev. 1994, 14, 347. [Google Scholar] [CrossRef]
- Mortara, G.; Chiarle, M. Instability of recent moraines in the Italian Alps. Effects of natural processes and human intervention having environmental and hazard implications. G. Geol. Appl. 2005, 1, 139–146. [Google Scholar]
- Hugenholtz, C.H.; Moorman, B.J.; Barlow, J.; Wainstein, P.A. Large-scale moraine deformation at the Athabasca Glacier, Jasper National Park, Alberta, Canada. Landslides 2008, 5, 251–260. [Google Scholar] [CrossRef]
- Bovenga, F.; Refice, A.; Pasquariello, G.; Nitti, D.O.; Nutricato, R. Corner reflectors and multi-temporal SAR interferometry for landslide monitoring. In Proceedings of the SPIE Remote Sensing 2014 Conference, Amsterdam, The Netherlands, 22–25 September 2014. [Google Scholar]
- Schubert, A.; Miranda, N.; Geudtner, D.; Small, D. Sentinel-1A/B Combined Product Geolocation Accuracy. Remote Sens. 2017, 9, 607. [Google Scholar] [CrossRef]
- Ponton, F.; Walpersdorf, A.; Gay, M.; Trouvé, E.; Mugnier, J.L.; Fallourd, R.; Cotte, N.; Ott, L.; Serafini, J. GPS and TerraSARX time series measure temperate glacier flow in the Mont Blanc massif (France): The Argentière glacier test site. In Proceedings of the European Geosciences Union General Assembly 2012 (EGU 2012), Vienna, Austria, 22–27 April 2012. [Google Scholar]
- Garnier, R. Suivi des variations du glissement du glacier d’Argentière par GPS haute fréquence. Master’s Thesis, Institut des sciences de la terre (ISTerre), Université Grenoble Alpes, Gières, France, 2017. [Google Scholar]
- Werner, C.; Wegmuller, U.; Strozzi, T.; Wiesmann, A. Interferometric point target analysis for deformation mapping. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003. [Google Scholar]
- Werner, C.L.; Wegmüller, U.; Strozzi, T. Deformation Time-Series of the Lost-Hills Oil Field using a Multi-Baseline Interferometric SAR Inversion Algorithm with Finite Difference Smoothing Constraints. In AGU Fall Meeting Abstracts; American Geophysical Union: Washington, DC, USA, 2012. [Google Scholar]
- Kampes, B.M. Radar Interferometry: Persistent Scatterer Technique; Number 12 in Remote Sensing and Digital Image Processing; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Maune, D.F. Digital Elevation Model Technologies and Applications: The Dem Users Manual, 2nd ed.; ASPRS: Bethesda, MD, USA, 2007. [Google Scholar]
- Liu, X.; Zhang, Z.; Peterson, J.; Chandra, S. LiDAR-Derived High Quality Ground Control Information and DEM for Image Orthorectification. GeoInformatica 2007, 11, 37–53. [Google Scholar] [CrossRef] [Green Version]
- Aguilar, F.J.; Mills, J.P. Accuracy assessment of lidar-derived digital elevation models. Photogramm. Rec. 2008, 23, 148–169. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Bresnahan, P. Accuracy of Airborne Lidar-Derived Elevation. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar] [CrossRef]
- Takahashi, T.; Yamamoto, K.; Senda, Y.; Tsuzuku, M. Estimating individual tree heights of sugi (Cryptomeria japonica D. Don) plantations in mountainous areas using small-footprint airborne LiDAR. J. For. Res. 2005, 10, 135–142. [Google Scholar] [CrossRef]
- Montazeri, S.; Rodriguez Gonzalez, F.; Zhu, X.X. Geocoding Error Correction for InSAR Point Clouds. Remote Sens. 2018, 10, 1523. [Google Scholar] [CrossRef]
- Dheenathayalan, P.; Small, D.; Schubert, A.; Hanssen, R.F. High-precision positioning of radar scatterers. J. Geod. 2016, 90, 403–422. [Google Scholar] [CrossRef] [Green Version]
- Gernhardt, S. High Precision 3d Localization and Motion Analysis of Persistent Scatterers Using Meter-Resolution Radar Satellite Data. Ph.D. Thesis, Technical University of Munich, Munich, Germany, 2011. [Google Scholar]
- Yang, M.; Dheenathayalan, P.; Chang, L.; Wang, J.; Lindenbergh, R.; Liao, M.; Hanssen, R. High-precision 3D geolocation of persistent scatterers with one single-Epoch GCP and LIDAR DSM data. In Proceedings of Living Planet Symposium 2016; Ouwehand, L., Ed.; European Space Agency: Paris, France, 2016; Volume SP-740, p. 398. [Google Scholar]
- Dheenathayalan, P.; Small, D.; Hanssen, R.F. 3-D Positioning and Target Association for Medium-Resolution SAR Sensors. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6841–6853. [Google Scholar] [CrossRef]
- Bovenga, F.; Belmonte, A.; Refice, A.; Pasquariello, G.; Nutricato, R.; Nitti, D.O.; Chiaradia, M.T. Performance Analysis of Satellite Missions for Multi-Temporal SAR Interferometry. Sensors 2018, 18, 1359. [Google Scholar] [CrossRef]
- Costantini, M.; Malvarosa, F.; Minati, F.; Trillo, F.; Vecchioli, F. Complementarity of high-resolution COSMO-SkyMed and medium-resolution Sentinel-1 SAR interferometry: Quantitative analysis of real target displacement and 3D positioning measurement precision, and potential operational scenarios. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 4602–4605. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| - | Shape | Side Length | ||||
|---|---|---|---|---|---|---|
| (mm) | (dBm) | (dBm) | (dBm) | (dBm) | ||
| CR1, CR4, CR5 | T | 955 | 30.46 | 26.76 | 35.59 | 30.77 |
| CR2 | Perf. T | 955 | 30 | 26.44 | 35 | 30.60 |
| CR3 | Perf. R | 500 | 26.46 | 24.02 | 33.89 | 26.46 |
| CR 6, CR8, CR9 | T | 700 | 25.06 | - | 30.20 | - |
| CR7, CR10 | T | 450 | 17.38 | - | 22.52 | - |
| Corner Reflectors | RCS | SCR | Phase Error |
|---|---|---|---|
| CR1 | 28.00 | 17.16 | 0.17 |
| CR2 | 28.47 | 14.15 | 0.19 |
| CR3 | 23.50 | 13.36 | 0.19 |
| CR4 | 28.18 | 12.69 | 0.2 |
| CR5 | 28.72 | 17.21 | 0.17 |
| CR6 | 22.47 | 13.73 | 0.19 |
| Corner Reflectors | Mean RCS | Mean SCR |
|---|---|---|
| CR1 | 29.24 | 17.11 |
| CR2 | 27.47 | 8.89 |
| CR3 | 25.13 | 13.32 |
| Corner | 2016-10-10 | 2017-05-15 | 2017-08-01/2017-10-30 | 2017-09-30 | 2018-07-09 |
|---|---|---|---|---|---|
| Reflectors | 2017-09-30 | 2017-09-06 | 2018-07-09/2018-09-25 | 2017-10-30 | 2018-09-25 |
| CR1 | X | X | 8.86 | 16.35 | 16.56 |
| CR2 | X | X | 0.47 | 20.16 | 0.85 |
| CR3 | X | X | 0.49 | 12.60 | 0.95 |
| CR4 | 1.76 | 25.35 | 11.09 | 11.19 | 16.79 |
| CR5 | 1.45 | 7.18 | 10.66 | 12.54 | 13.95 |
| CR6 | 2.89 | 4.89 | 4.34 | 8.66 | 3.44 |
| Temperature | Positive/negative alternation | Mainly positive | Mainly positive | Positive/negative alternation | Positive |
| Snow cover | 7 months out of 12 | 1 month out of 4 | <30 cm, only few days | <30 cm, only few days | None |
| Dates | Time Interval (d) | Velocity (cm/d) | Direction | Difference from Glacier |
|---|---|---|---|---|
| Flow Direction | ||||
| 2017-10-01/2017-10-19 | 18 | °E | −9.7° | |
| 2017-10-01/2017-10-25 | 24 | °E | −30.1° | |
| 2017-10-01/2017-11-24 | 54 | 292°E | −7.0° | |
| 2017-10-19/2017-11-24 | 36 | ° | −4.9° |
| Dates | Time Interval (d) | Velocity (cm/d) | Direction | Difference from Glacier |
|---|---|---|---|---|
| Flow Direction | ||||
| 2017-09-30/2017-10-06 | 6 | °E | −31.8° | |
| 2017-09-30/2017-10-18 | 18 | °E | −26.9° | |
| 2017-09-30/2017-10-30 | 30 | °E | −8.4° | |
| 2017-09-30/2017-11-17 | 48 | °E | −24.0° | |
| 2017-09-30/2018-07-09 | 282 | °E | 9.4° | |
| 2017-11-17/2018-07-15 | 240 | ° | −8.2° |
| Processing Step | PS Height Shift (m) | PS Height RMSE (m) | CR Height RMSE (m) |
|---|---|---|---|
| First iteration (simultaneous atmosphere/height estimates) | 31.1 | 11.01 | |
| First iteration (Stepwise approach) | 14.98 | 2.58 | |
| Final estimate (Stepwise approach) | 14.85 | 0.15 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jauvin, M.; Yan, Y.; Trouvé, E.; Fruneau, B.; Gay, M.; Girard, B. Integration of Corner Reflectors for the Monitoring of Mountain Glacier Areas with Sentinel-1 Time Series. Remote Sens. 2019, 11, 988. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11080988
Jauvin M, Yan Y, Trouvé E, Fruneau B, Gay M, Girard B. Integration of Corner Reflectors for the Monitoring of Mountain Glacier Areas with Sentinel-1 Time Series. Remote Sensing. 2019; 11(8):988. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11080988
Chicago/Turabian StyleJauvin, Matthias, Yajing Yan, Emmanuel Trouvé, Bénédicte Fruneau, Michel Gay, and Blaise Girard. 2019. "Integration of Corner Reflectors for the Monitoring of Mountain Glacier Areas with Sentinel-1 Time Series" Remote Sensing 11, no. 8: 988. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11080988