Applications of QC and Merged Doppler Spectral Density Data from Ka-Band Cloud Radar to Microphysics Retrieval and Comparison with Airplane in Situ Observation

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data and Instrument Descriptions
2.1.1. Cloud Radar
2.1.2. Aircraft Instruments
2.2. Data Processing Methods
3. Results
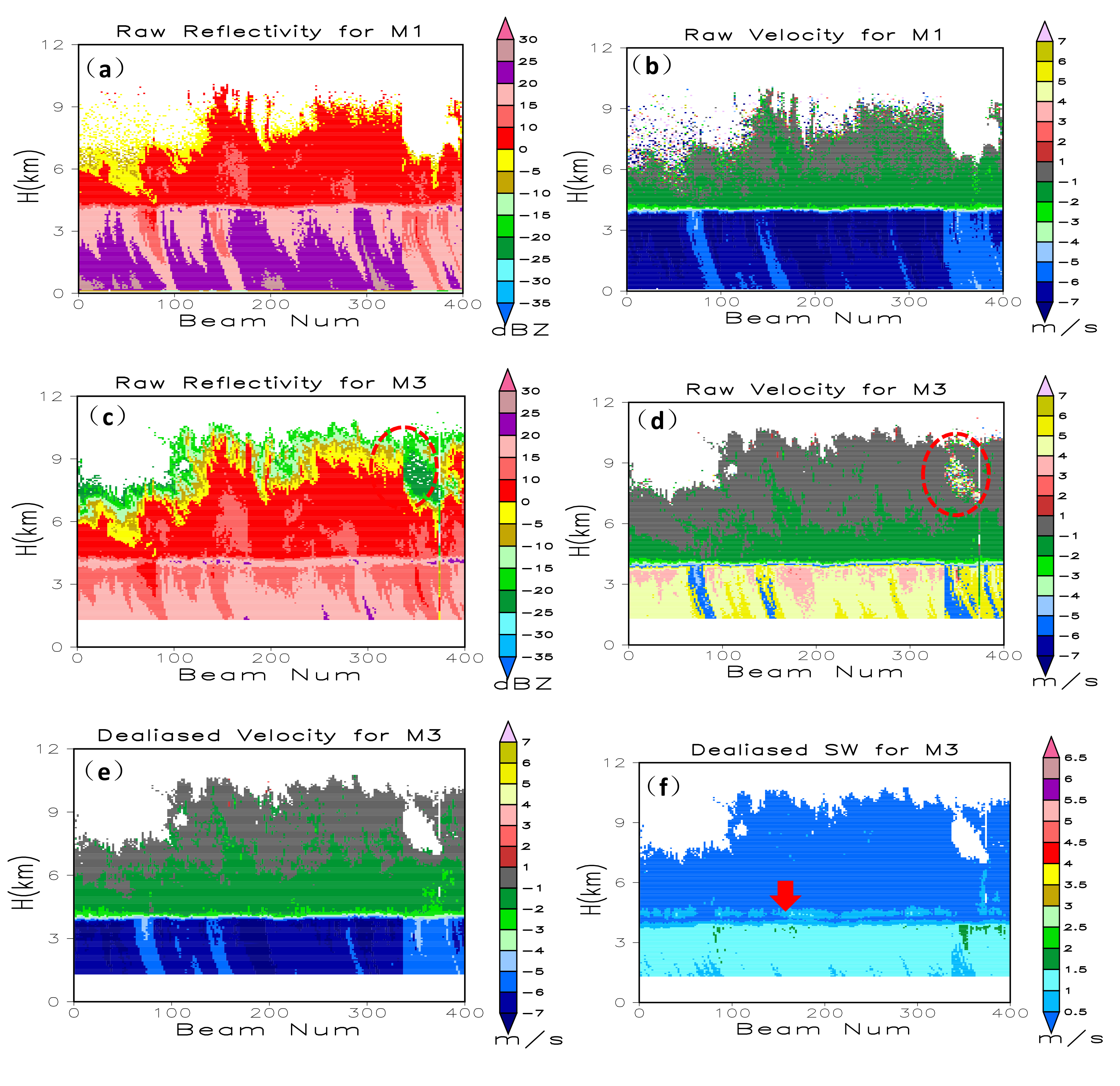
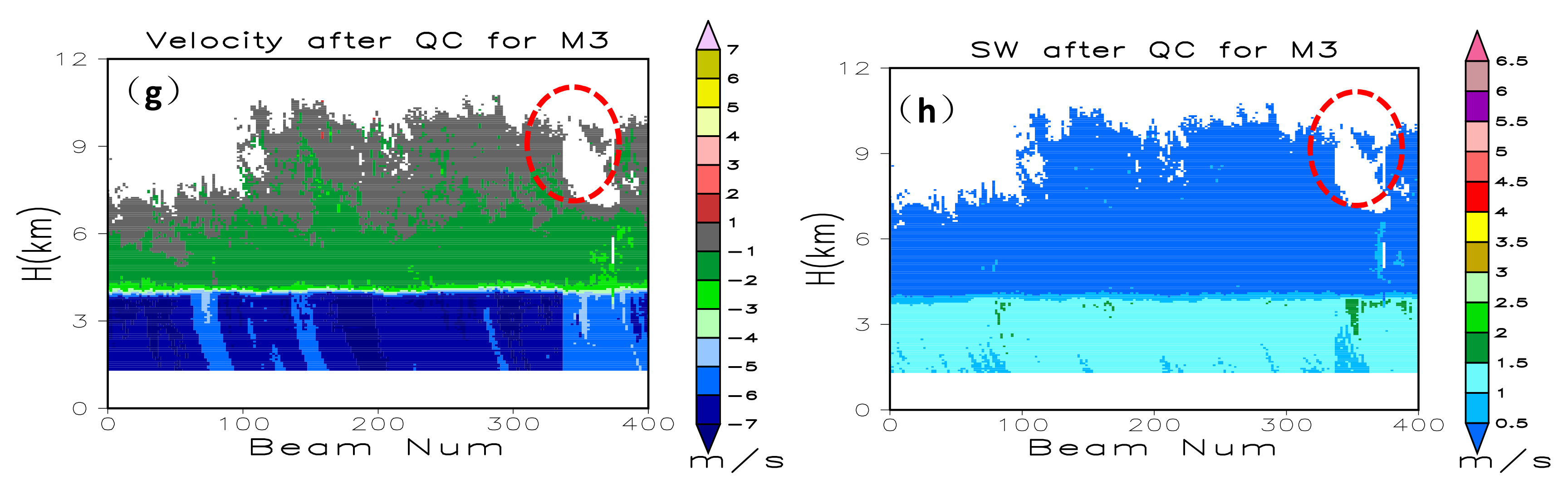
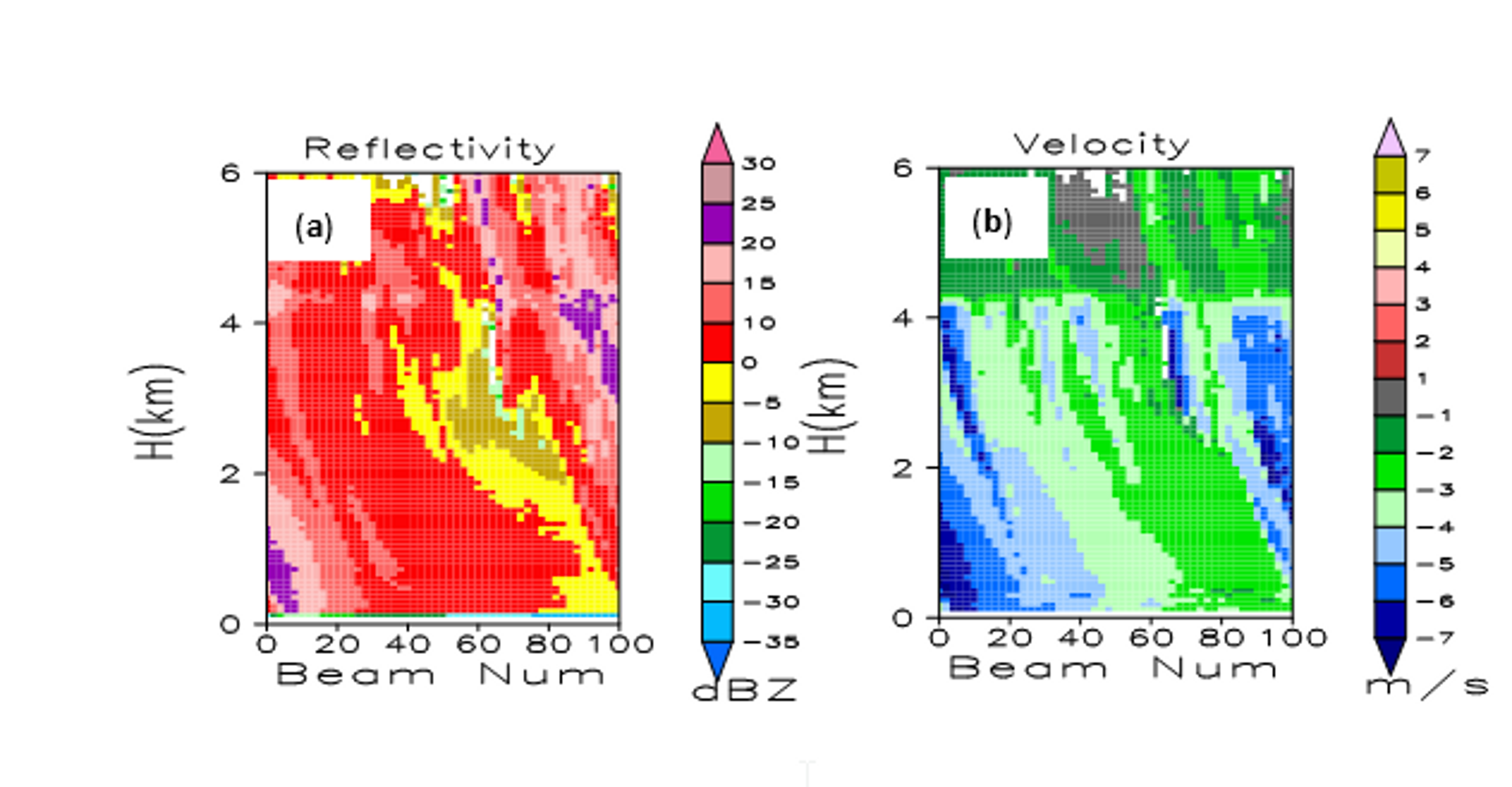
3.1. Consistency Analysis of Reflectivity and Velocity for the Four Modes and QC Results
3.2. Consistency Analysis of Doppler Spectral Density for the Four Modes and Merged Results
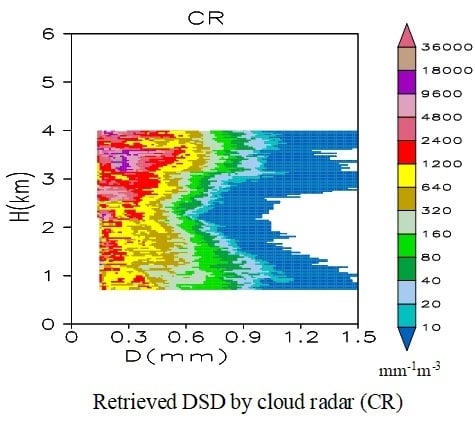
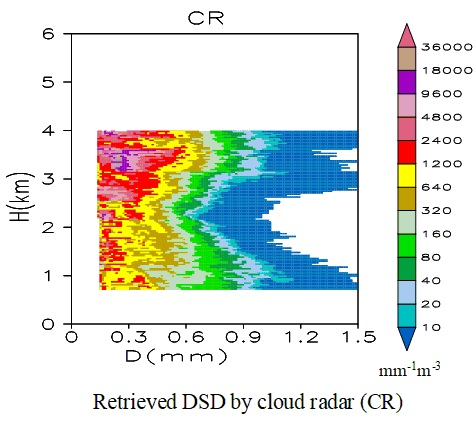
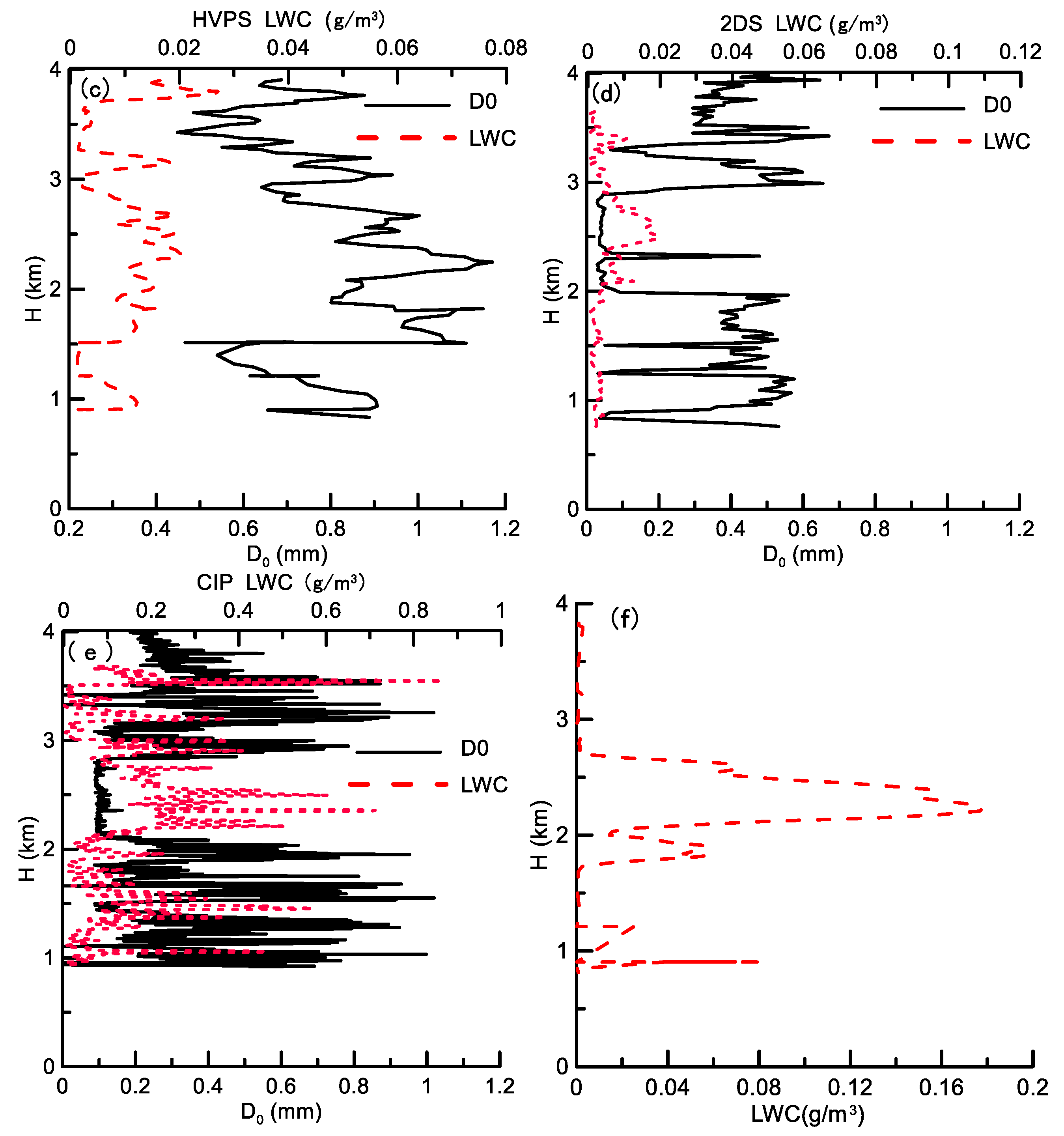
3.3. Application of CR Data to Microphysical Parameter Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Schmidt, G.; Ruster, R.; Czechowsky, P. Complementary code and digital filtering for detection of weak VHF radar signals from the mesosphere. IEEE Trans. Geosci. Electron. 1979, 17, 154–161. [Google Scholar] [CrossRef]
- Moran, K.P.; Martner, B.E.; Post, M.J.; Kropfli, R.A.; Welsh, D.C.; Widener, K.B. An unattended cloud-profiling radar for use in climate research. Bull. Am. Meteorol. Soc. 1998, 79, 443–455. [Google Scholar] [CrossRef]
- Clothiaux, E.E.; Moran, K.P.; Martner, B.E.; Ackerman, T.P.; Mace, G.G.; Uttal, T.; Mather, J.H.; Widener, K.B.; Miller, M.A.; Rodriguez, D.J. The Atmospheric Radiation Measurement Program Cloud Radars: Operational Modes. J. Atmos. Ocean. Technol. 1999, 16, 819–827. [Google Scholar] [CrossRef] [Green Version]
- Kollias, P.; Clothiaus, E.E.; Miller, M.A.; Luke, E.P.; Johnson, K.L.; Moran, K.P.; Widener, K.B.; Albrecht, B.A. The atmospheric radiation measurement program cloud profiling radars: Second-generation sampling stratrgies, processing and cloud data products. J. Atmos. Ocean. Technol. 2007, 24, 1119–1214. [Google Scholar] [CrossRef]
- Rogers, R.R. An extension of the Z-R relation for Doppler radar. In Proceedings of the 11th Weather Radar Conference, Boulder, CO, USA, 14–18 September 1964; pp. 158–161. [Google Scholar]
- Hauser, D.; Amayenc, P. A New Method for Deducing Hydrometeor-Size Distributions and Vertical Air Motions from Doppler Radar Measurements at Vertical Incidence. J. Appl. Meteorol. 1981, 20, 547–555. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Liu, L.; Zhu, K.; Wu, J.; Wang, B. A Method for Retrieving Vertical Air Velocities in Convective Clouds over the Tibetan Plateau from TIPEX-III Cloud Radar Doppler Spectra. Remote Sens. 2017, 9, 964. [Google Scholar] [CrossRef]
- Lhermitte, R. Observations of rain at vertical incidence with a 94 GHz Doppler radar: An insight of Mie scattering. Geophys. Res. Lett. 1988, 15, 1125–1128. [Google Scholar] [CrossRef]
- Kollias, P.; Albrecht, B.A.; Marks, F.D., Jr. Cloud radar observations of vertical drafts and microphysics in convective rain. J. Geophys. Res. 2003, 108, 40–53. [Google Scholar] [CrossRef]
- Gossard, E.E.; Strauch, R.G. Measurement of cloud droplet size spectra by Doppler radar. J. Atmos. Ocean. Technol. 1994, 11, 712–726. [Google Scholar] [CrossRef]
- Kollias, P.; Albrecht, B.A.; Lhermitte, R.; Savtchenko, A. Radar observations of updrafts, downdrafts, and turbulence in fair weather cumuli. J. Atmos. Sci. 2001, 58, 1750–1766. [Google Scholar] [CrossRef]
- Shupe, M.D.; Kollias, P.; Matrosov, S.Y.; Schneider, T.L. Deriving mixed-phase cloud properties from Doppler radar spectra. J. Atmos. Ocean. Technol. 2004, 21, 660–670. [Google Scholar] [CrossRef]
- Shupe, M.D.; Koliias, P.; Matrosov, M.; Eloranta, E. On deriving vertical air motions from cloud radar Doppler spectra. J. Atmos. Ocean. Technol. 2008, 25, 547–557. [Google Scholar] [CrossRef]
- Kollias, P.; Albrecht B, A.; Marks, F. Why Mie? Accurate observations of vertical air velocities and raindrops using a cloud radar. Bull. Am. Meteorol. Soc. 2002, 83, 1471–1483. [Google Scholar] [CrossRef]
- Löffler-Mang, M.; Kunz, M.; Schmid, W. On the Performance of a low-cost K-band Doppler radar for quantitative rain measurements. J. Atmos. Ocean. Technol. 1999, 16, 379–387. [Google Scholar]
- Kollias, P.; Lhermitte, R.; Albrecht B., A. Vertical air motion and raindrop size distributions in convective systems using a 94 GHz radar. Geophys. Res. Lett. 1999, 26, 3109–3112. [Google Scholar] [CrossRef]
- Liu, L.; Xie, L.; Cui, Z. Examination and application of Doppler spectral density data in drop size distribution retrival in weak precipitation by cloud radar. Chin. J. Atmos. Sci. 2014, 38, 223–236. (In Chinese) [Google Scholar]
- Kollias, P.; Rémillard, J.; Luke, E.; Szyrmer, W. Cloud radar Doppler spectra in drizzling stratiform clouds: 1. Forward modeling and remote sensing applications. J. Geophys. Res. 2011, 116, D13201. [Google Scholar] [CrossRef] [Green Version]
- Maahn, M.; Kollias, P. Improved micro rain radar snow measurements using Doppler spectra post-processing. Atmos. Meas. Technol. 2012, 5, 2661–2673. [Google Scholar] [CrossRef]
- Liu, L.P.; Zheng, J.F.; Wu, J.Y. A Ka-band solid-state transmitter cloud radar and data merging algorithm for its measurements. Adv. Atmos. Sci. 2017, 34, 545–558. [Google Scholar] [CrossRef]
- Liu, L.; Jiafeng, Z. Algorithms for Doppler spectral density data quality control and merging for the Ka-Band solid-state transmitter cloud radar. Remote Sens. 2019, 11, 209. [Google Scholar] [CrossRef]
- Paul Lawson, R.; O’connor, D.; Zmarzly, P.; Weaver, K.; Baker, B.; Mo, Q.; Jonsson, H. The 2D-S (Stereo) probe: design and preliminary tests of a new airborne, high-speed, high-resolution particle imaging probe. J. Atmos. Ocean. Technol. 2006, 23, 1462–1477. [Google Scholar] [CrossRef]
- Doviak, R.J.; Zrnić, D.S. Doppler Radar and Weather Observations, 2nd ed.; Academic Press: Cambridge, MA, USA, 1993; p. 562. [Google Scholar]
- Barber, P.; Yeh, C. Scattering of electromagnetic wave by arbitrarily shaped dielectric bodies. Appl. Opt. 1975, 14, 2864–2872. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Teng, X.; Ji, L.; Zhao, F. A study of the relationship between the attenuation coefficient and radar reflectivity factor for spherical particles in clouds at millimeter wavelengths (in Chinese with English abstract). Acta Meteor. Sin. 2011, 69, 1020–1028. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | Items | Technical Specifications |
|---|---|---|
| 1 | Radar system | Coherent, pulsed Doppler, solid-state transmitter, pulse compression |
| 2 | Radar frequency | 35.0 GHz (Ka-band) |
| 3 | Beam width | 0.30° |
| 4 | Pulse repeat frequency | 8000 Hz |
| 5 | Peak power | 50 W |
| 6 | Detecting parameters | Z, Vr, Sw, LDR, SP |
| Detection capability | ≤−34.5 dBZ at 5 km | |
| 7 | Range of detection | Height: 0.120–15 km reflectivity: −45 to + 30 dBZ radial velocity: −17.13 to 17.13 m s−1 (maximum) velocity spectrum width: 0 to 4 m s−1 (maximum) |
| 8 | Spatial and temporal resolutions | Temporal resolution: 16 s Height resolution: 30 m |
| Order | Items | Technical Specifications |
|---|---|---|
| Antenna Subsystem | ||
| 1 | Operating frequency | Ka-band |
| 2 | Antenna gain | ≥53.6 dB |
| 3 | Beam width | ≤0.30° |
| 4 | First sidelobe level | ≤−22 dB |
| 5 | Sidelobe level | ≤−42 dB |
| 6 | Cross-polarization isolation | 32.0 dB |
| 7 | Radar transceiver feeder | ≤3 dB |
| Transmitter subsystem | ||
| 1 | System | Solid-state transmitter |
| 2 | Peak power | ≥50 W |
| 3 | Duty ratio | ≥10% |
| Receiver subsystem | ||
| 1 | Noise figure | ≤5 dB |
| 2 | Reflectivity dynamic range | ≥75 dB |
| 3 | Phase noise | ≤−96 dBc/Hz at 1 kHz |
| 4 | Intermediate frequency (IF) processing | Digital IF receiver |
| The signal processing subsystem | ||
| 1 | A/D bits | ≥14 bits |
| 2 | Signal processing | Pulse compression, FFT, coherent integration, incoherent integration |
| 3 | Range solution | 30 m |
| 4 | Number of range gates | ≥500 |
| 5 | Output | Doppler spectral density data |
| Order | Item | Precipitation Mode (M1) | Boundary Mode (M2) | Middle Level(M3) | Cirrus Mode (M4) |
|---|---|---|---|---|---|
| 1 | Pulse width | 0.2 μs | 2 μs | 8 μs | 20 μs |
| 2 | Pulse repetition frequency | 8000 Hz | 8000 Hz | 8000 Hz | 8000 Hz |
| 3 | Number of coherent integrations | 1 | 3 | 3 | 2 |
| 4 | Number of incoherent integrations | 4 | 4 | 4 | 4 |
| 5 | Number of fast Fourier transform | 256 | 256 | 256 | 256 |
| 6 | Dwell time | 4 s | 4 s | 4 s | 4 s |
| 7 | Range sample volume spacing | 30 m | 30 m | 30 m | 30 m |
| 8 | Minimum range | 30 m | 300 m | 1200 m | 3000 m |
| 9 | Maximum range | 18 km | 18 km | 18 km | 18 km |
| 10 | Nyquist velocity | 17.13 m·s−1 | 5.7 m·s−1 | 5.7 m·s−1 | 8.56 m·s−1 |
| 11 | Velocity resolution | 0.068 m·s−1 | 0.023 m·s−1 | 0.023 m·s−1 | 0.034 m·s−1 |
| 12 | Minimum detective reflectivity at 5 km | −12.4 dBZ | −26.9 dBZ | −32.9 dBZ | −34.9 dBZ |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Ding, H.; Dong, X.; Cao, J.; Su, T. Applications of QC and Merged Doppler Spectral Density Data from Ka-Band Cloud Radar to Microphysics Retrieval and Comparison with Airplane in Situ Observation. Remote Sens. 2019, 11, 1595. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11131595
Liu L, Ding H, Dong X, Cao J, Su T. Applications of QC and Merged Doppler Spectral Density Data from Ka-Band Cloud Radar to Microphysics Retrieval and Comparison with Airplane in Situ Observation. Remote Sensing. 2019; 11(13):1595. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11131595
Chicago/Turabian StyleLiu, Liping, Han Ding, Xiaobo Dong, Junwu Cao, and Tao Su. 2019. "Applications of QC and Merged Doppler Spectral Density Data from Ka-Band Cloud Radar to Microphysics Retrieval and Comparison with Airplane in Situ Observation" Remote Sensing 11, no. 13: 1595. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11131595