Advantages of Geostationary Satellites for Ionospheric Anomaly Studies: Ionospheric Plasma Depletion Following a Rocket Launch

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Dataset
2.2. Simulated Real-Time Scenario
2.3. VARION-GEO Methodology
2.4. Noise Reduction Algorithm
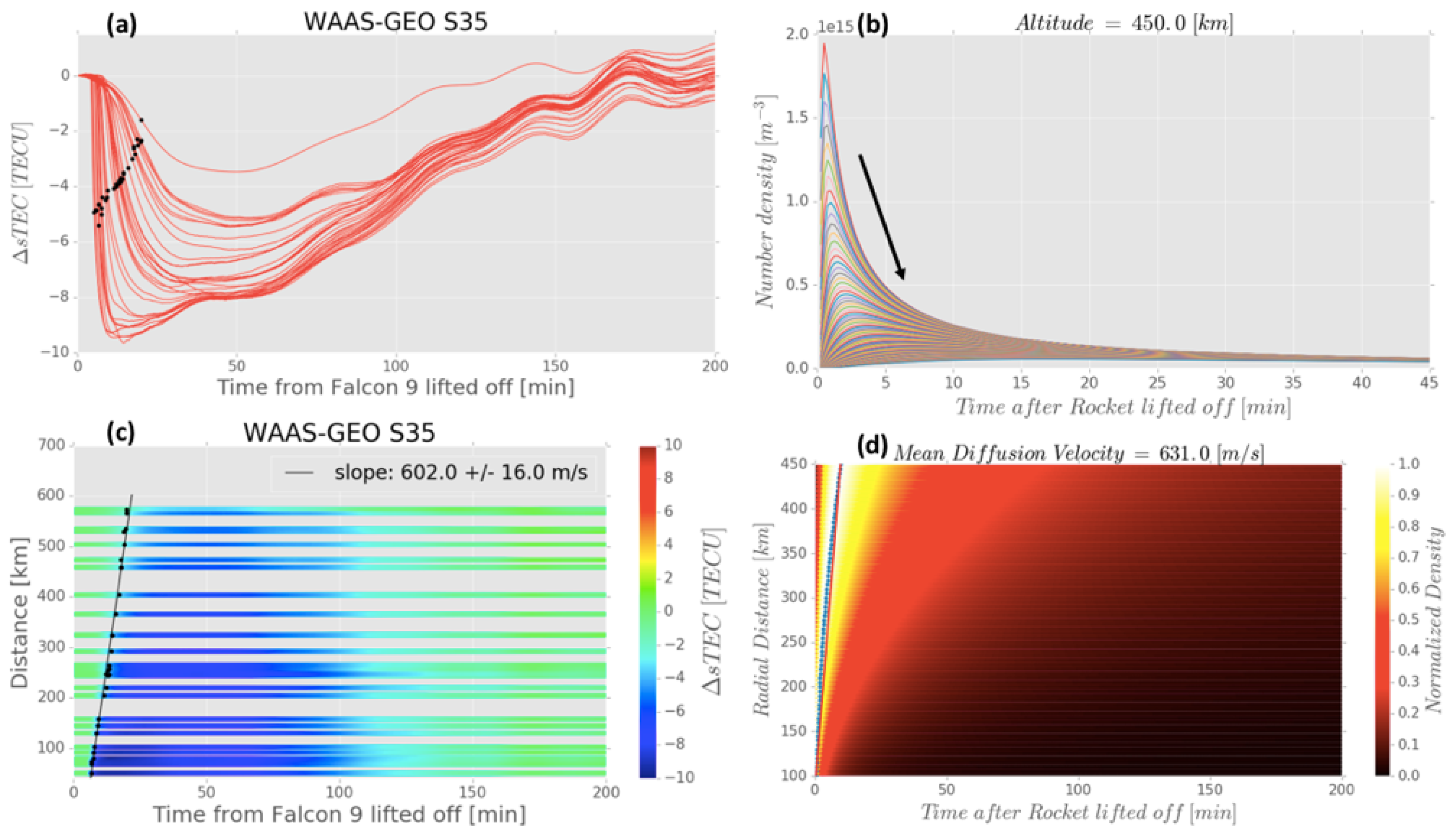
2.5. Diffusion Velocity Simulation
- The neutral gasses from the plume can be considered to have entered the ionosphere at zero speed.
- The dispersion is considered to be highly governed by diffusion rather than advection.
- The diffusion is considered isotropic at every effusion point.
3. Results
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| WAAS | Wide Area Augmentation System |
| GEO | Geostationary |
| MEO | Medium Earth Orbit |
| VARION | Variometric Approach for Real-Time Ionosphere Observation |
| GNSS | Global Navigation Satellites Systems |
| TEC | Total Electron Content |
| sTEC | slant Total Electron Content |
| TECU | Total Electron Content Unit |
| IPP | Ionospheric Pierce Point |
| TID | Traveling Ionospheric Disturbance |
| AGW | Acoustic-Gravity Wave |
| GDGPS | Global Differential GPS System |
| SAW | Shock Acoustic Wave |
| PBO | Plate Boundary Observatory |
| RINEX | Receiver Independent Exchange Format |
| ECEF | Earth Centered Earth Fixed |
| WGS84 | World Geodetic System 1984 |
References
- Booker, H.G. A local reduction of F-region ionization due to missile transit. J. Geophys. Res. 1961, 66, 1073–1079. [Google Scholar] [CrossRef]
- Mendillo, M.; Hawkins, G.S.; Klobuchar, J.A. A sudden vanishing of the ionospheric F region due to the launch of Skylab. J. Geophys. Res. 1975, 80, 2217–2225. [Google Scholar] [CrossRef]
- Bernhardt, P.A.; Huba, J.D.; Kudeki, E.; Woodman, R.F.; Condori, L.; Villanueva, F. Lifetime of a depression in the plasma density over Jicamarca produced by space shuttle exhaust in the ionosphere. Radio Sci. 2001, 36, 1209–1220. [Google Scholar] [CrossRef]
- Bernhardt, P.A.; Erickson, P.J.; Lind, F.D.; Foster, J.C.; Reinisch, B.W. Artificial disturbances of the ionosphere over the Millstone Hill Incoherent Scatter Radar from dedicated burns of the space shuttle orbital maneuver subsystem engines. J. Geophys. Res. 2005, 110, A05311. [Google Scholar] [CrossRef]
- Bernhardt, P.A.; Ballenthin, J.O.; Baumgardner, J.L.; Bhatt, A.; Boyd, I.D.; Burt, J.M.; Caton, R.G.; Coster, A.; Erickson, P.J.; Huba, J.D.; et al. Ground and space-based measurement of rocket engine burns in the ionosphere. IEEE Trans. Plasma Sci. 2012, 40, 1267–1286. [Google Scholar] [CrossRef]
- Mendillo, M.; Smith, S.; Coster, A.; Erickson, P.; Baumgardner, J.; Martinis, C. Man-made space weather. Space Weather 2008, 6, S09001. [Google Scholar] [CrossRef]
- Furuya, T.; Heki, K. Ionospheric hole behind an ascending rocket observed with a dense GPS array. Earth Planets Space 2008, 60, 235–239. [Google Scholar] [CrossRef] [Green Version]
- Ozeki, M.; Heki, K. Ionospheric holes made by ballistic missiles from North Korea detected with a Japanese dense GPS array. J. Geophys. Res. 2010, 115, A09314. [Google Scholar] [CrossRef]
- Nakashima, Y.; Heki, K. Ionospheric hole made by the 2012 North Korean rocket observed with a dense GNSS array in Japan. Radio Sci. 2014, 49, 497–505. [Google Scholar] [CrossRef] [Green Version]
- Arendt, P.R. Ionospheric undulations following Apollo 14 launching. Nature 1971, 231, 438. [Google Scholar] [CrossRef]
- Noble, S.T. A large-amplitude traveling ionospheric disturbance excited by the Space Shuttle during launch. J. Geophys. Res. 1990, 95, 19037–19044. [Google Scholar] [CrossRef]
- Kakinami, Y.; Yamamoto, M.; Chen, C.-H.; Watanabe, S.; Lin, C.; Liu, J.-Y.; Habu, H. Ionospheric disturbances induced by a missile launched from North Korea on 12 December 2012. J. Geophys. Res. Space Phys. 2013, 118, 5184–5189. [Google Scholar] [CrossRef]
- Ding, F.; Wan, W.; Mao, T.; Wang, M.; Ning, B.; Zhao, B.; Xiong, B. Ionospheric response to the shock and acoustic waves excited by the launch of the Shenzhou 10 spacecraft. Geophys. Res. Lett. 2014, 41, 3351–3358. [Google Scholar] [CrossRef]
- Mannucci, A.J.; Wilson, B.D.; Yuan, D.N.; Ho, C.H.; Lindqwister, U.J.; Runge, T.F. A global mapping technique for GPS derived ionospheric total electron content measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Komjathy, A.; Sparks, L.; Wilson, B.D.; Mannucci, A.J. Automated daily processing of more than 1000 ground-based GPS receivers for studying intense ionospheric storms. Radio Sci. 2005, 40, RS6006. [Google Scholar] [CrossRef]
- Sardon, E.; Rius, A.; Zarraoa, N. Estimation of the transmitter and receiver differential biases and the ionospheric total electron content from Global Positioning System observations. Radio Sci. 1994, 29, 577–586. [Google Scholar] [CrossRef]
- Hajj, G.A.; Lee, L.C.; Pi, X.; Romans, L.J.; Schreiner, W.S.; Straus, P.R.; Wang, C. COSMIC GPS ionospheric sensing and space weather. Terr. Atmos. Ocean. Sci. 2000, 11, 235–272. [Google Scholar] [CrossRef]
- Savastano, G.; Komjathy, A.; Verkhoglyadova, O.; Mazzoni, A.; Crespi, M.; Wei, Y.; Mannucci, A.J. Real-Time Detection of Tsunami Ionospheric Disturbances with a Stand-Alone GNSS Receiver: A Preliminary Feasibility Demonstration. Sci. Rep. 2017, 7, 46607. [Google Scholar] [CrossRef]
- Fratarcangeli, F.; Ravanelli, M.; Mazzoni, A.; Colosimo, G.; Benedetti, E.; Branzanti, M.; Savastano, G.; Verkhoglyadova, O.; Komjathy, A.; Crespi, M. The variometric approach to real-time high-frequency geodesy. Rend. Fis. Acc. Lincei 2018, 29, 95. [Google Scholar] [CrossRef]
- Chou, M.-Y.; Shen, M.-H.; Lin, C.C.H.; Yue, J.; Chen, C.-H.; Liu, J.-Y.; Lin, J.-T. Gigantic circular shock acoustic waves in the ionosphere triggered by the launch of FORMOSAT-5 satellite. Space Weather 2018, 16, 172–184. [Google Scholar] [CrossRef]
- Huang, F.; Lei, J.; Dou, X. Daytime ionospheric longitudinal gradients seen in the observations from a regional BeiDou GEO receiver network. J. Geophys. Res. Space Phys. 2017, 122, 6552–6561. [Google Scholar] [CrossRef]
- Yang, H.; Yang, X.; Zhang, Z.; Zhao, K. High-Precision Ionosphere Monitoring Using Continuous Measurements from BDS GEO Satellites. Sensors 2018, 18, 714. [Google Scholar] [CrossRef] [PubMed]
- Padokhin, A.M.; Tereshin, N.A.; Yasyukevich, Y.V.; Andreeva, E.S.; Nazarenko, M.O.; Yasyukevich, A.S.; Kozlovtseva, E.A.; Kurbatov, G.A. Application of BDS-GEO for studying TEC variability in equatorial ionosphere on different time scales. Adv. Space Res. 2018, 63, 257–269. [Google Scholar] [CrossRef]
- Cooper, C.; Mitchell, C.N.; Wright, C.J.; Jackson, D.R.; Witvliet, B.A. Measurement of ionospheric total electron content using single-frequency geostationary satellite observations. Radio Sci. 2019, 54, 10–19. [Google Scholar] [CrossRef]
- Kunitsyn, V.E.; Padokhin, A.M.; Kurbatov, G.A.; Yasyukevich, Y.V.; Morozov, Y.V. Ionospheric TEC estimation with the signals of various geostationary navigational satellites. GPS Solut. 2016, 20, 877. [Google Scholar] [CrossRef]
- Savastano, G. New Applications and Challenges of GNSS Variometric Approach. Ph.D. Thesis, Department DICEA, Università La Sapienza, Rome, Italy, 2018. Available online: http://hdl.handle.net/11573/1077041 (accessed on 7 May 2019).
- Chen, Y.-H.; Juang, J.-C.; De Lorenzo, D.S.; Seo, J.; Lo, S.; Enge, P.; Akos, D.M. Real-Time Dual-Frequency (L1/L5) GPS/WAAS Software Receiver. In Proceedings of the 24th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 19–23 September 2011; pp. 767–774. [Google Scholar]
- Fratarcangeli, F.; Savastano, G.; D’Achille, M.C.; Mazzoni, A.; Crespi, M.; Riguzzi, F.; Devoti, R.; Pietrantonio, G. VADASE Reliability and Accuracy of Real-Time Displacement Estimation: Application to the Central Italy 2016 Earthquakes. Remote Sens. 2018, 10, 1201. [Google Scholar] [CrossRef]
- Ssessanga, N.; Kim, Y.H.; Choi, B.; Chung, J.-K. The 4D-var estimation of North Korean rocket exhaust emissions into the ionosphere. J. Geophys. Res. Space Phys. 2018, 123, 2315–2326. [Google Scholar] [CrossRef]
- Calais, E.; Minster, J.B. GPS detection of ionospheric perturbations following the January 17, 1994, Northridge earthquake. Geophys. Res. Lett. 1995, 22, 1045–1048. [Google Scholar] [CrossRef]
- Calais, E.; Minster, J.B. GPS detection of ionospheric perturbations following a space shuttle ascent. Geophys. Res. Lett. 1996, 23, 1897–1900. [Google Scholar] [CrossRef]
- Chen, C.H.; Saito, A.; Lin, C.H.; Liu, J.Y.; Tsai, H.F.; Tsugawa, T.; Otsuka, Y.; Nishioka, M.; Matsumura, M. Long-distance propagation of ionospheric disturbance generated by the 2011 off the Pacific coast of Tohoku Earthquake. Earth Planets Space 2011, 63, 67. [Google Scholar] [CrossRef]
- Bowling, T.; Calais, E.; Haase, J.S. Detection and modelling of the ionospheric perturbation caused by a space shuttle launch using a network of ground-based Global Positioning System stations. Geophys. J. Int. 2013, 192, 1324–1331. [Google Scholar] [CrossRef]
- Lin, C.C.; Shen, M.H.; Chou, M.Y.; Chen, C.H.; Yue, J.; Chen, P.C.; Matsumura, M. Concentric traveling ionospheric disturbances triggered by the launch of a SpaceX Falcon 9 rocket. Geophys. Res. Lett. 2017, 44, 7578–7586. [Google Scholar] [CrossRef]
- Liu, H.; Ding, F.; Yue, X.; Zhao, B.; Song, Q.; Wan, W.; Ning, B.; Zhang, K. Depletion and traveling ionospheric disturbances generated by two launches of China’s Long March 4B rocket. J. Geophys. Res. Space Phys. 2018, 123, 10319–10330. [Google Scholar] [CrossRef]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Savastano, G.; Komjathy, A.; Shume, E.; Vergados, P.; Ravanelli, M.; Verkhoglyadova, O.; Meng, X.; Crespi, M. Advantages of Geostationary Satellites for Ionospheric Anomaly Studies: Ionospheric Plasma Depletion Following a Rocket Launch. Remote Sens. 2019, 11, 1734. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11141734
Savastano G, Komjathy A, Shume E, Vergados P, Ravanelli M, Verkhoglyadova O, Meng X, Crespi M. Advantages of Geostationary Satellites for Ionospheric Anomaly Studies: Ionospheric Plasma Depletion Following a Rocket Launch. Remote Sensing. 2019; 11(14):1734. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11141734
Chicago/Turabian StyleSavastano, Giorgio, Attila Komjathy, Esayas Shume, Panagiotis Vergados, Michela Ravanelli, Olga Verkhoglyadova, Xing Meng, and Mattia Crespi. 2019. "Advantages of Geostationary Satellites for Ionospheric Anomaly Studies: Ionospheric Plasma Depletion Following a Rocket Launch" Remote Sensing 11, no. 14: 1734. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11141734