The Local Median Filtering Method for Correcting the Laser Return Intensity Information from Discrete Airborne Laser Scanning Data


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Sites
2.2. ALS Data Collection
2.3. The LRI Correction Method
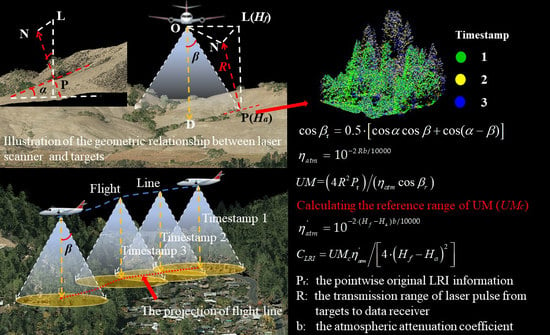
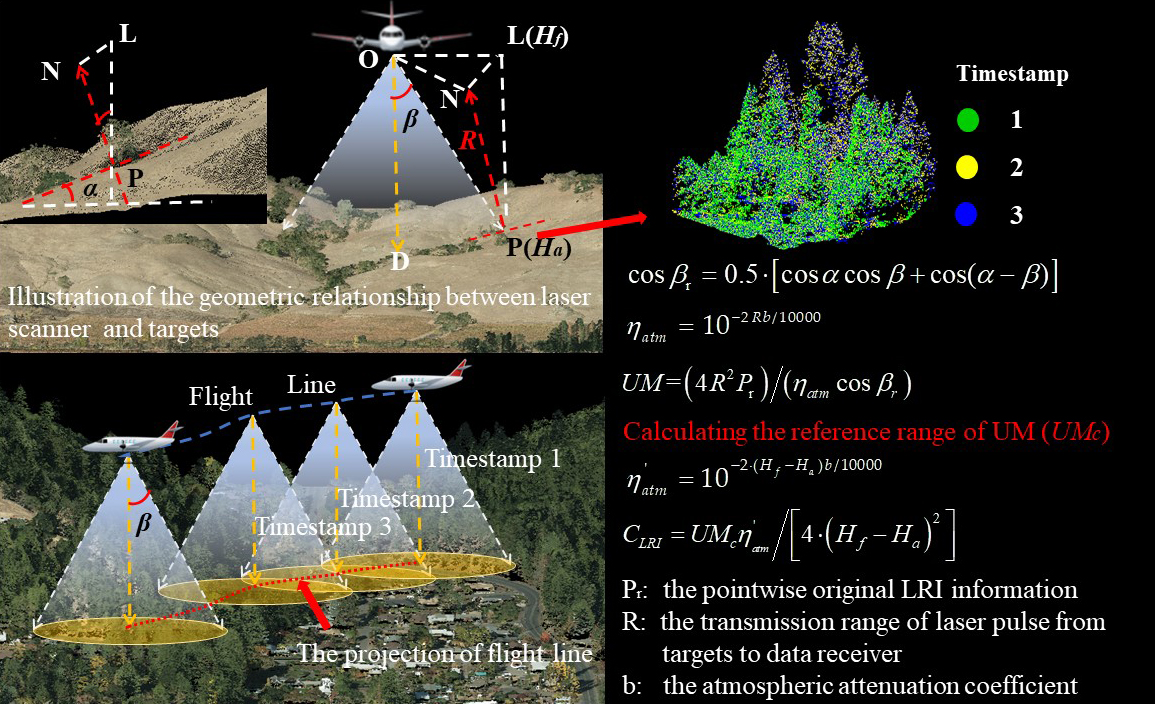
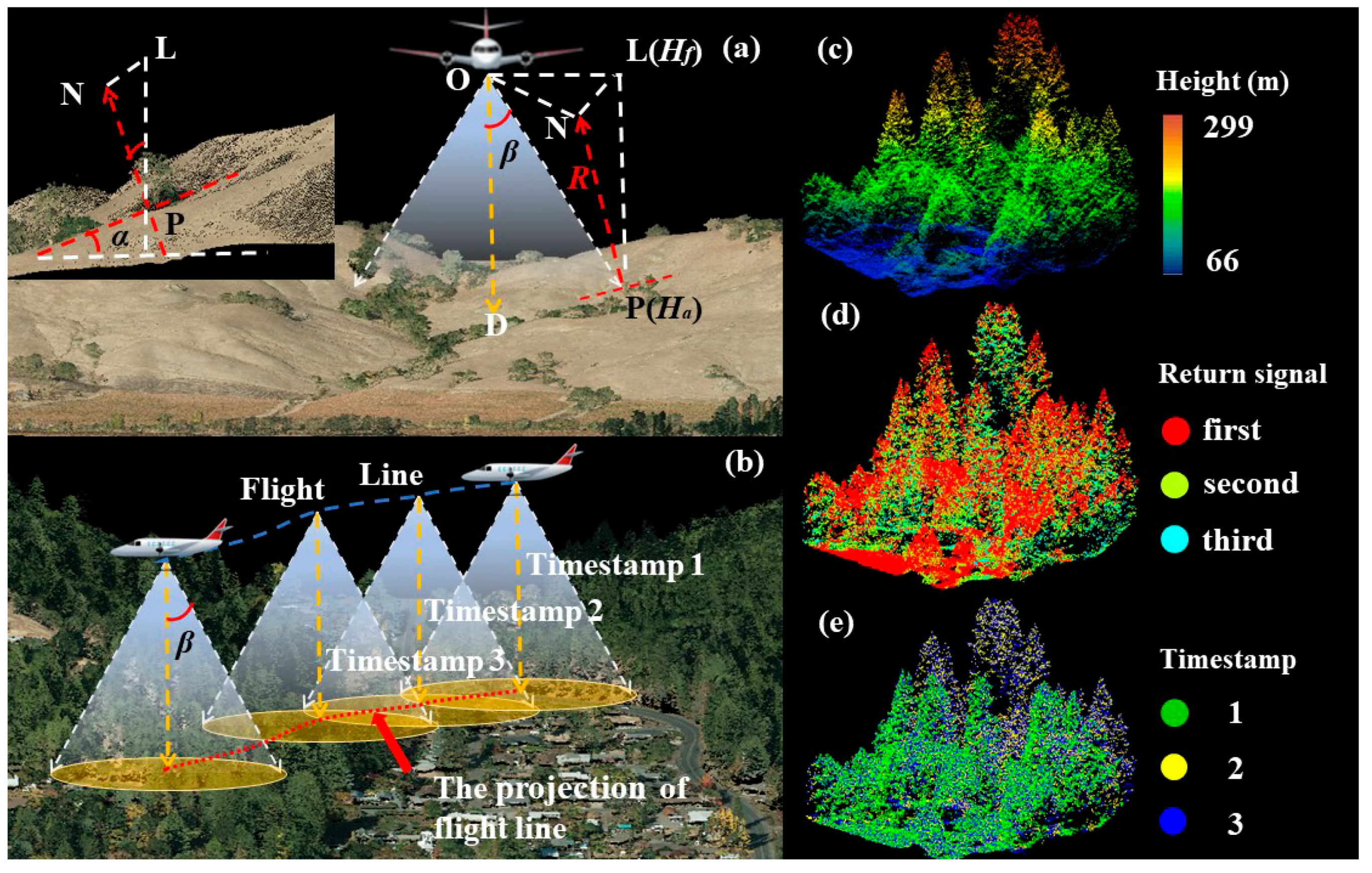
2.3.1. Background: The Simplified Radar Equation
2.3.2. LRI Correction Methods
2.4. The LRI Correction Results Evaluation
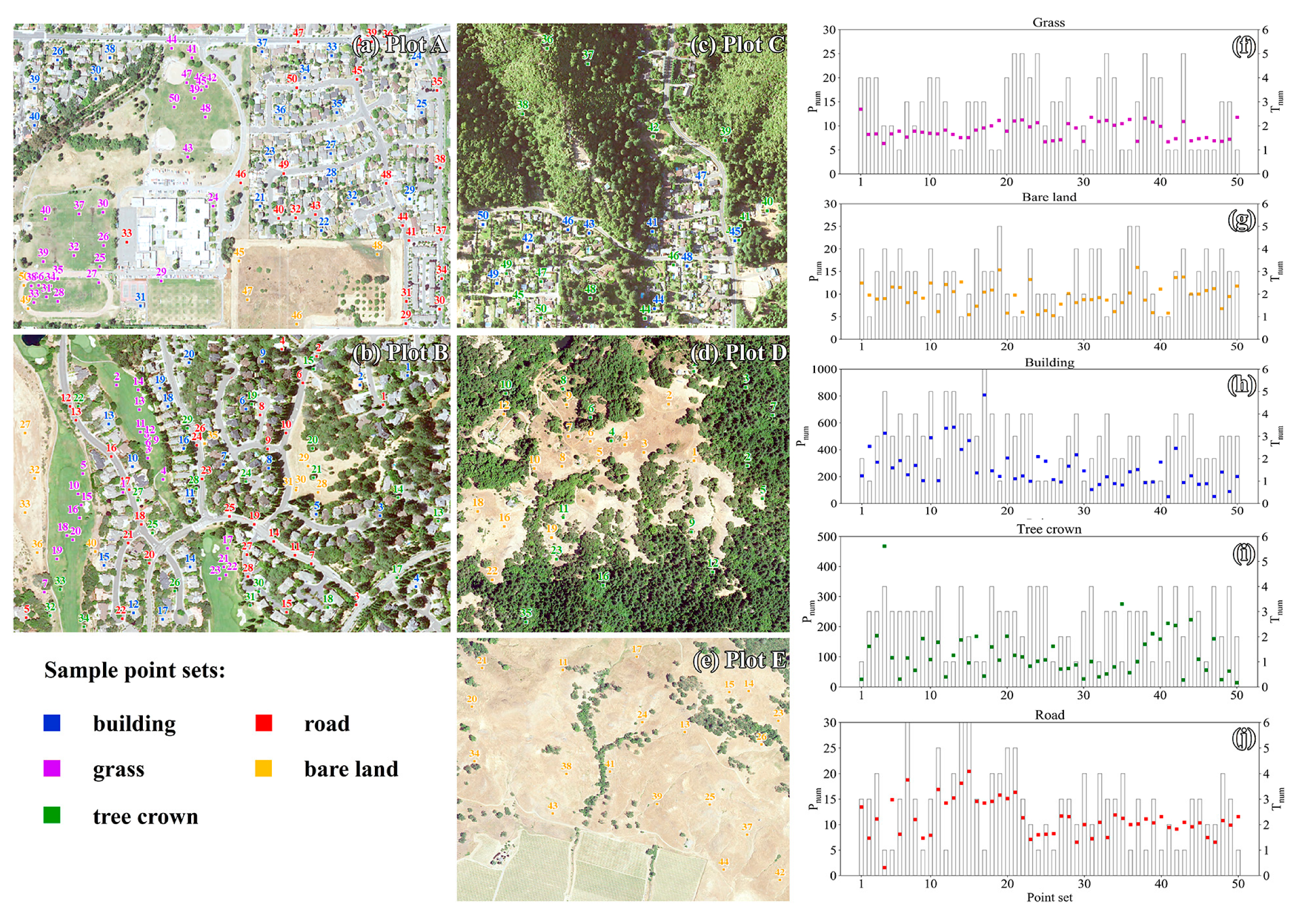
2.4.1. Random Sampling and Evaluation
2.4.2. Land Cover Classification
3. Results
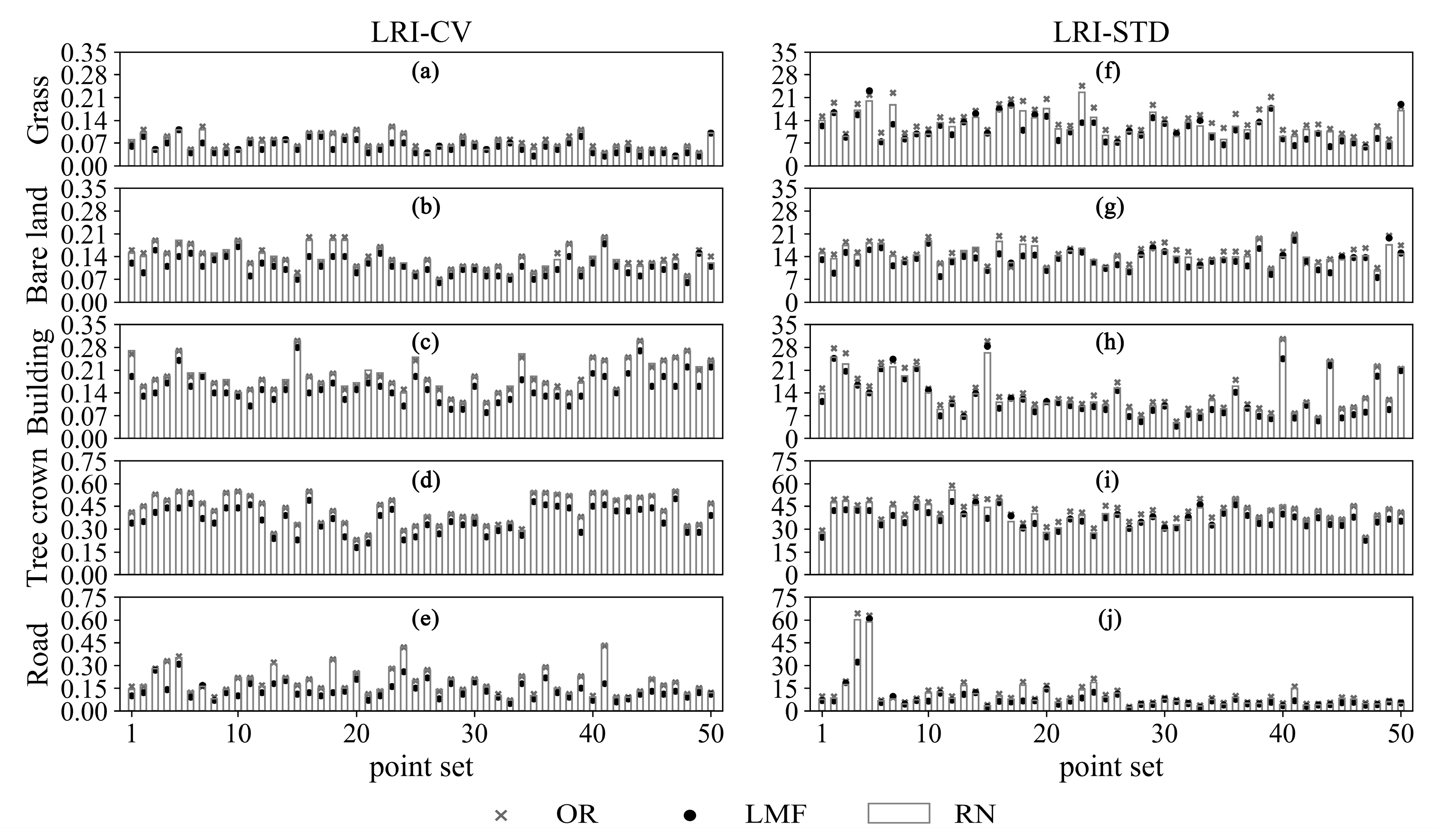
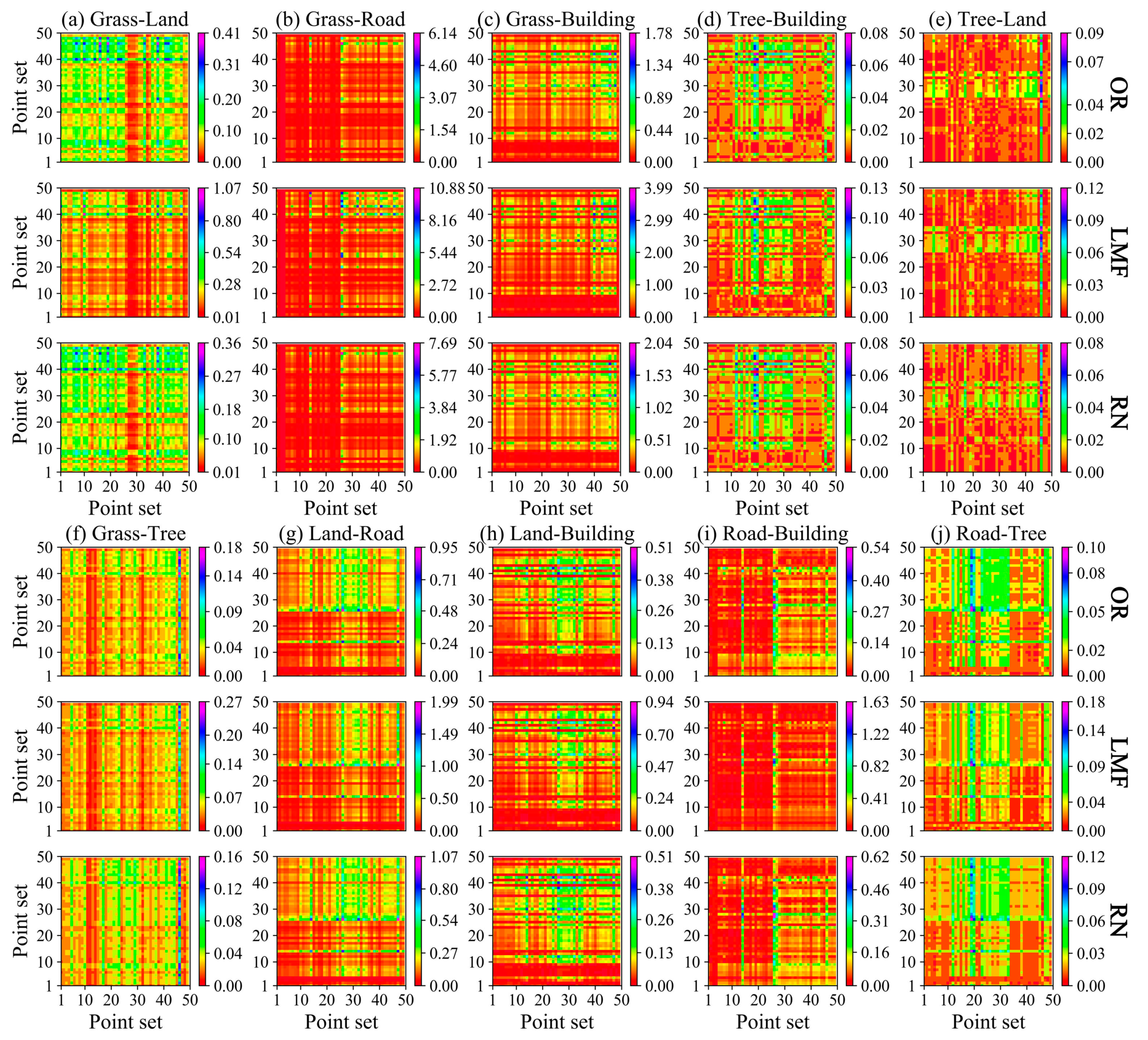
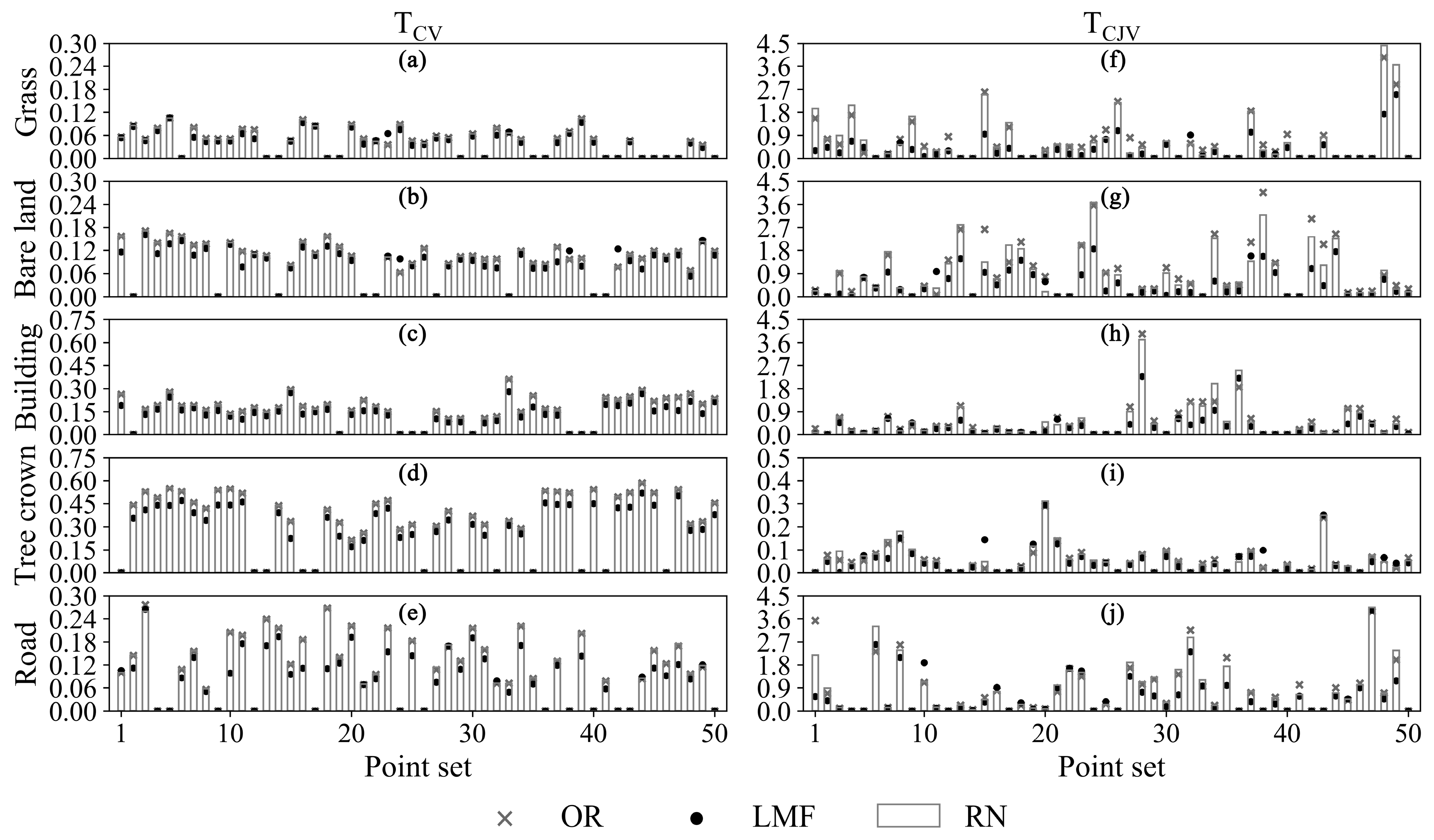
3.1. The LRI Correction Results of Sample Point Sets
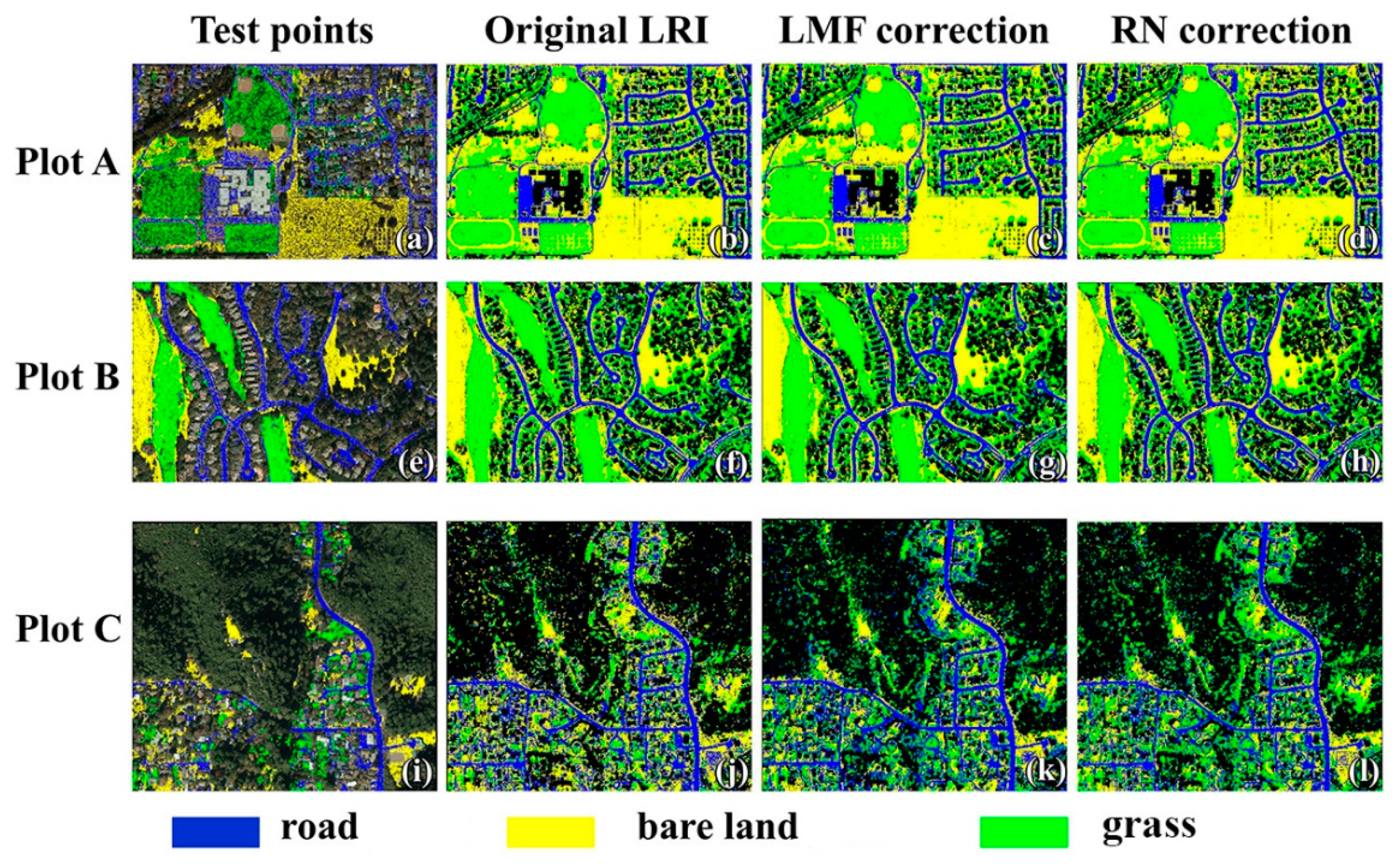
3.2. The Classification Accuracy of Ground Points
4. Discussion
4.1. Sensitivity Analysis: R vs. UM
4.2. Comparison with the RN Method
4.3. The Sources of Outliers in the LMF-Corrected LRI Information
4.4. Limitations and Potential Applications
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nevalainen, O.; Hakala, T.; Suomalainen, J.; Mäkipää, R.; Peltoniemi, M.; Krooks, A.; Kaasalainen, S. Fast and nondestructive method for leaf level chlorophyll estimation using hyperspectral LiDAR. Agric. For. Meteorol. 2014, 198–199, 250–258. [Google Scholar] [CrossRef]
- You, H.; Wang, T.; Skidmore, A.; Xing, Y. Quantifying the Effects of Normalisation of Airborne LiDAR Intensity on Coniferous Forest Leaf Area Index Estimations. Remote Sens. 2017, 9, 163. [Google Scholar] [CrossRef] [Green Version]
- Eitel, J.U.H.; Höfle, B.; Vierling, L.A.; Abellán, A.; Asner, G.P.; Deems, J.S.; Glennie, C.L.; Joerg, P.C.; LeWinter, A.L.; Magney, T.S.; et al. Beyond 3-D: The new spectrum of lidar applications for earth and ecological sciences. Remote Sens. Environ. 2016, 186, 372–392. [Google Scholar] [CrossRef] [Green Version]
- Yan, W.Y.; Shaker, A.; Habib, A.; Kersting, A.P. Improving classification accuracy of airborne LiDAR intensity data by geometric calibration and radiometric correction. ISPRS J. Photogramm. Remote Sens. 2012, 67, 35–44. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, T.; Skidmore, A.K.; Heurich, M. Important LiDAR metrics for discriminating forest tree species in Central Europe. ISPRS J. Photogramm. Remote Sens. 2018, 137, 163–174. [Google Scholar] [CrossRef]
- Moffiet, T.; Mengersen, K.; Witte, C.; King, R.; Denham, R. Airborne laser scanning: Exploratory data analysis indicates potential variables for classification of individual trees or forest stands according to species. ISPRS J. Photogramm. Remote Sens. 2005, 59, 289–309. [Google Scholar] [CrossRef]
- Luo, S.; Chen, J.M.; Wang, C.; Gonsamo, A.; Xi, X.; Lin, Y.; Qian, M.; Peng, D.; Nie, S.; Qin, H. Comparative Performances of Airborne LiDAR Height and Intensity Data for Leaf Area Index Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 300–310. [Google Scholar] [CrossRef]
- Grotti, M.; Calders, K.; Origo, N.; Puletti, N.; Alivernini, A.; Ferrara, C.; Chianucci, F. An intensity, image-based method to estimate gap fraction, canopy openness and effective leaf area index from phase-shift terrestrial laser scanning. Agric. For. Meteorol. 2020, 280. [Google Scholar] [CrossRef]
- Zheng, N.; Zhigang, X.; Gang, S.; Wenjiang, H.; Li, W.; Mingbo, F.; Wang, L.; Wenbin, H.; Shuai, G. Design of a New Multispectral Waveform LiDAR Instrument to Monitor Vegetation. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1506–1510. [Google Scholar] [CrossRef]
- Wallace, A.M.; McCarthy, A.; Nichol, C.J.; Ximing, R.; Morak, S.; Martinez-Ramirez, D.; Woodhouse, I.H.; Buller, G.S. Design and Evaluation of Multispectral LiDAR for the Recovery of Arboreal Parameters. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4942–4954. [Google Scholar] [CrossRef] [Green Version]
- Kaasalainen, S.; Pyysalo, U.; Krooks, A.; Vain, A.; Kukko, A.; Hyyppa, J.; Kaasalainen, M. Absolute radiometric calibration of Als intensity data: Effects on accuracy and target classification. Sensors 2011, 11, 10586–10602. [Google Scholar] [CrossRef] [PubMed]
- Hopkinson, C.; Chasmer, L. Testing LiDAR models of fractional cover across multiple forest ecozones. Remote Sens. Environ. 2009, 113, 275–288. [Google Scholar] [CrossRef]
- Korpela, I.; Ørka, H.O.; Hyyppä, J.; Heikkinen, V.; Tokola, T. Range and AGC normalization in airborne discrete-return LiDAR intensity data for forest canopies. ISPRS J. Photogramm. Remote Sens. 2010, 65, 369–379. [Google Scholar] [CrossRef]
- Ding, Q.; Chen, W.; King, B.; Liu, Y.; Liu, G. Combination of overlap-driven adjustment and Phong model for LiDAR intensity correction. ISPRS J. Photogramm. Remote Sens. 2013, 75, 40–47. [Google Scholar] [CrossRef]
- Martin, P.; Andreas, U. Improving quality of laser scanning data acquisition through calibrated amplitude and pulse deviation measurement. In Proceedings of the SPIE, Laser Radar Technology and Applications XV, 76841F, Orlando, FL, USA, 29 April 2010. [Google Scholar] [CrossRef]
- Vain, A.; Yu, X.; Kaasalainen, S.; Hyyppa, J. Correcting Airborne Laser Scanning Intensity Data for Automatic Gain Control Effect. IEEE Geosci. Remote Sens. Lett. 2010, 7, 511–514. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Ahokas, E.; Hyyppa, J.; Suomalainen, J. Study of Surface Brightness From Backscattered Laser Intensity: Calibration of Laser Data. IEEE Geosci. Remote Sens. Lett. 2005, 2, 255–259. [Google Scholar] [CrossRef]
- Kashani, A.G.; Olsen, M.J.; Parrish, C.E.; Wilson, N. A Review of LIDAR Radiometric Processing: From Ad Hoc Intensity Correction to Rigorous Radiometric Calibration. Sensors 2015, 15, 28099–28128. [Google Scholar] [CrossRef] [Green Version]
- Höfle, B.; Pfeifer, N. Correction of laser scanning intensity data: Data and model-driven approaches. ISPRS J. Photogramm. Remote Sens. 2007, 62, 415–433. [Google Scholar] [CrossRef]
- Kukko, A.; Kaasalainen, S.; Litkey, P. Effect of incidence angle on laser scanner intensity and surface data. Appl. Opt. 2008, 47, 986. [Google Scholar] [CrossRef]
- Yan, W.Y.; Shaker, A. Radiometric correction and normalization of airborne LiDAR intensity data for improving land-cover classification. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7658–7673. [Google Scholar]
- Kim, S.; Hinckley, T.; Briggs, D. Classifying individual tree genera using stepwise cluster analysis based on height and intensity metrics derived from airborne laser scanner data. Remote Sens. Environ. 2011, 115, 3329–3342. [Google Scholar] [CrossRef]
- Gatziolis, D. Dynamic range-based intensity normalization for airborne, discrete return LiDAR data of forest canopies. Photogramm. Eng. Remote Sens. 2011, 77, 251–259. [Google Scholar] [CrossRef]
- Kukkonen, M.; Maltamo, M.; Korhonen, L.; Packalen, P. Multispectral Airborne LiDAR Data in the Prediction of Boreal Tree Species Composition. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3462–3471. [Google Scholar] [CrossRef]
- Shaker, A.; Yan, W.Y.; El-Ashmawy, N. The Effects of Laser Reflection Angle on Radiometric Correction of the Airborne Lidar Intensity Data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-5/W12, 213–217. [Google Scholar] [CrossRef] [Green Version]
- Ahokas, E.; Kaasalainen, S.; Hyyppä, J.; Suomalainen, J. Calibration of the Optech ALTM 3100 laser scanner intensity data using brightness targets. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 1Á6. [Google Scholar]
- Kaasalainen, S.; Hyyppa, H.; Kukko, A.; Litkey, P.; Ahokas, E.; Hyyppa, J.; Lehner, H.; Jaakkola, A.; Suomalainen, J.; Akujarvi, A.; et al. Radiometric Calibration of LIDAR Intensity With Commercially Available Reference Targets. IEEE Trans. Geosci. Remote Sens. 2009, 47, 588–598. [Google Scholar] [CrossRef]
- Vain, A.; Kaasalainen, S.; Pyysalo, U.; Krooks, A.; Litkey, P. Use of naturally available reference targets to calibrate airborne laser scanning intensity data. Sensors 2009, 9, 2780–2796. [Google Scholar] [CrossRef]
- Clark, M.L.; Kilham, N.E. Mapping of land cover in northern California with simulated hyperspectral satellite imagery. ISPRS J. Photogramm. Remote Sens. 2016, 119, 228–245. [Google Scholar] [CrossRef]
- Wagner, W. Radiometric calibration of small-footprint full-waveform airborne laser scanner measurements: Basic physical concepts. ISPRS J. Photogramm. Remote Sens. 2010, 65, 505–513. [Google Scholar] [CrossRef]
- Brell, M.; Segl, K.; Guanter, L.; Bookhagen, B. Hyperspectral and Lidar Intensity Data Fusion: A Framework for the Rigorous Correction of Illumination, Anisotropic Effects, and Cross Calibration. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2799–2810. [Google Scholar] [CrossRef] [Green Version]
- McGill, R.; Tukey, J.; Larsen, W. Variations of Box Plots. Am. Stat. 1978, 32, 12–16. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Dietterich, T.G. Approximate statistical tests for comparing supervised classification learning algorithms. Neural Comput. 1998, 10, 1895–1923. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Keränen, J.; Maltamo, M.; Packalen, P. Effect of flying altitude, scanning angle and scanning mode on the accuracy of ALS based forest inventory. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 349–360. [Google Scholar] [CrossRef]
- Coren, F.; Sterzai, P. Radiometric correction in laser scanning. Int. J. Remote Sens. 2007, 27, 3097–3104. [Google Scholar] [CrossRef]
- García, M.; Riaño, D.; Chuvieco, E.; Danson, F.M. Estimating biomass carbon stocks for a Mediterranean forest in central Spain using LiDAR height and intensity data. Remote Sens. Environ. 2010, 114, 816–830. [Google Scholar] [CrossRef]
- Wei, G.; Shalei, S.; Bo, Z.; Shuo, S.; Faquan, L.; Xuewu, C. Multi-wavelength canopy LiDAR for remote sensing of vegetation: Design and system performance. ISPRS J. Photogramm. Remote Sens. 2012, 69, 1–9. [Google Scholar] [CrossRef]
- Jutzi, B.; Gross, H. Normalization of Lidar Intensity Data Based On Range and Surface Incidence Angle. Comptes Rendus Mec. 2014, 6, 407–414. [Google Scholar]
- Hopkinson, C. The influence of flying altitude, beam divergence, and pulse repetition frequency on laser pulse return intensity and canopy frequency distribution. Can. J. Remote Sens. 2007, 33, 312–324. [Google Scholar] [CrossRef]
- Qin, Y.; Yao, W.; Vu, T.T.; Li, S.; Niu, Z.; Ban, Y. Characterizing Radiometric Attributes of Point Cloud Using a Normalized Reflective Factor Derived From Small Footprint LiDAR Waveform. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 740–749. [Google Scholar] [CrossRef]
- Shi, Y.; Skidmore, A.K.; Wang, T.; Holzwarth, S.; Heiden, U.; Pinnel, N.; Zhu, X.; Heurich, M. Tree species classification using plant functional traits from LiDAR and hyperspectral data. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 207–219. [Google Scholar] [CrossRef]
- Schneider, F.D.; Morsdorf, F.; Schmid, B.; Petchey, O.L.; Hueni, A.; Schimel, D.S.; Schaepman, M.E. Mapping functional diversity from remotely sensed morphological and physiological forest traits. Nat. Commun. 2017, 8, 1441. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kaasalainen, S.; Niittymaki, H.; Krooks, A.; Koch, K.; Kaartinen, H.; Vain, A.; Hyyppa, H. Effect of Target Moisture on Laser Scanner Intensity. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2128–2136. [Google Scholar] [CrossRef]
- Pérez-Harguindeguy, N.; Díaz, S.; Garnier, E.; Lavorel, S.; Poorter, H.; Jaureguiberry, P.; Bret-Harte, M.S.; Cornwell, W.K.; Craine, J.M.; Gurvich, D.E.; et al. New handbook for standardised measurement of plant functional traits worldwide. Aust. J. Bot. 2013, 61, 167. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot | Site Condition | Area (km2) | Mean Slope (degree) | FLnum | MAXscan (degree) |
|---|---|---|---|---|---|
| A | urban | 0.52 | 2 | 4 | 15 |
| B | urban | 0.45 | 9 | 2 | 20 |
| C | forest and urban | 0.57 | 18 | 5 | 13 |
| D | forest and bare land | 0.83 | 29 | 5 | 14 |
| E | bare land | 1.47 | 16 | 8 | 9 |
| Types | LRI | LRI-STD | LRI-CV | ||
|---|---|---|---|---|---|
| Max | Mean | Max | Mean | ||
| Grass | OR | 24.60 | 14.33 | 0.12 | 0.07 |
| LMF | 23.06 | 11.32 | 0.11 | 0.06 | |
| RN | 22.55 | 12.41 | 0.12 | 0.07 | |
| Bare land | OR | 20.73 | 15.27 | 0.20 | 0.14 |
| LMF | 19.76 | 13.03 | 0.18 | 0.11 | |
| RN | 20.73 | 14.44 | 0.20 | 0.13 | |
| Road | OR | 66.46 | 11.43 | 0.43 | 0.19 |
| LMF | 60.91 | 8.21 | 0.31 | 0.14 | |
| RN | 60.25 | 10.13 | 0.44 | 0.19 | |
| Building | OR | 30.55 | 14.17 | 0.30 | 0.19 |
| LMF | 28.35 | 12.03 | 0.28 | 0.15 | |
| RN | 30.60 | 13.11 | 0.30 | 0.19 | |
| Tree crown | OR | 58.85 | 41.85 | 0.55 | 0.43 |
| LMF | 48.18 | 36.55 | 0.50 | 0.36 | |
| RN | 55.84 | 39.66 | 0.56 | 0.43 | |
| Types | LRI | LRI-CJV | Types | LRI | LRI-CJV | ||
|---|---|---|---|---|---|---|---|
| Max | Mean | Max | Mean | ||||
| Building vs. Grass | OR | 1.78 | 0.22 | Grass vs. Bare land | OR | 0.41 | 0.11 |
| LMF | 3.99 | 0.41 | LMF | 1.07 | 0.16 | ||
| RN | 2.04 | 0.25 | RN | 0.36 | 0.10 | ||
| Building vs. Road | OR | 0.54 | 0.06 | Grass vs. Tree crown | OR | 0.18 | 0.03 |
| LMF | 1.63 | 0.15 | LMF | 0.27 | 0.05 | ||
| RN | 0.62 | 0.07 | RN | 0.16 | 0.03 | ||
| Building vs. Bare land | OR | 0.51 | 0.08 | Road vs. Bare land | OR | 0.95 | 0.14 |
| LMF | 0.94 | 0.18 | LMF | 1.99 | 0.24 | ||
| RN | 0.51 | 0.08 | RN | 1.07 | 0.17 | ||
| Building vs. Tree crown | OR | 0.08 | 0.01 | Road vs. Tree crown | OR | 0.10 | 0.02 |
| LMF | 0.13 | 0.02 | LMF | 0.18 | 0.03 | ||
| RN | 0.08 | 0.01 | RN | 0.12 | 0.02 | ||
| Grass vs. Road | OR | 6.14 | 0.41 | Bare land vs. Tree crown | OR | 0.09 | 0.01 |
| LMF | 10.88 | 0.93 | LMF | 0.12 | 0.01 | ||
| RN | 7.69 | 0.51 | RN | 0.08 | 0.01 | ||
| Types | Number | LRI | Mean TCV | Mean TCJV | TCV (LMF≤OR) | TCV (LMF≤RN) | TCJV (LMF≥OR) | TCJV (LMF≥RN) |
|---|---|---|---|---|---|---|---|---|
| Grass | 34 | OR | 0.06 | 0.98 | 29 | 30 | 32 | 31 |
| LMF | 0.06 | 0.50 | ||||||
| RN | 0.06 | 0.99 | ||||||
| Bare land | 41 | OR | 0.11 | 1.19 | 36 | 36 | 38 | 38 |
| LMF | 0.10 | 0.62 | ||||||
| RN | 0.11 | 1.06 | ||||||
| Road | 37 | OR | 0.15 | 1.08 | 31 | 32 | 29 | 30 |
| LMF | 0.12 | 0.83 | ||||||
| RN | 0.15 | 1.08 | ||||||
| Building | 40 | OR | 0.19 | 0.57 | 40 | 40 | 35 | 37 |
| LMF | 0.16 | 0.38 | ||||||
| RN | 0.19 | 0.58 | ||||||
| Tree crown | 38 | OR | 0.43 | 0.08 | 38 | 38 | 30 | 30 |
| LMF | 0.36 | 0.07 | ||||||
| RN | 0.43 | 0.08 |
| Plot | LRI | OA (%) | G-PA (%) | L-PA (%) | RO-PA (%) | G-UA (%) | L-UA (%) | RO-UA (%) | |
|---|---|---|---|---|---|---|---|---|---|
| A | OR | 79.59 | 79.56 | 63.58 | 95.63 | 94.33 | 92.10 | 65.21 | 0.69 |
| LMF | 81.83 | 83.01 | 64.36 | 98.12 | 97.46 | 95.56 | 66.52 | 0.73 | |
| RN | 80.32 | 80.80 | 64.80 | 95.35 | 94.22 | 93.32 | 65.84 | 0.70 | |
| B | OR | 86.11 | 94.12 | 72.08 | 92.13 | 91.53 | 95.11 | 75.88 | 0.79 |
| LMF | 88.65 | 97.41 | 74.04 | 94.49 | 94.51 | 98.24 | 77.72 | 0.83 | |
| RN | 87.29 | 94.84 | 74.36 | 92.67 | 92.86 | 95.17 | 77.40 | 0.81 | |
| C | OR | 82.35 | 76.14 | 93.68 | 77.22 | 93.35 | 81.44 | 74.66 | 0.74 |
| LMF | 85.27 | 76.71 | 95.55 | 83.56 | 95.91 | 85.96 | 76.75 | 0.78 | |
| RN | 82.90 | 77.20 | 90.45 | 81.04 | 93.08 | 83.92 | 74.15 | 0.74 |
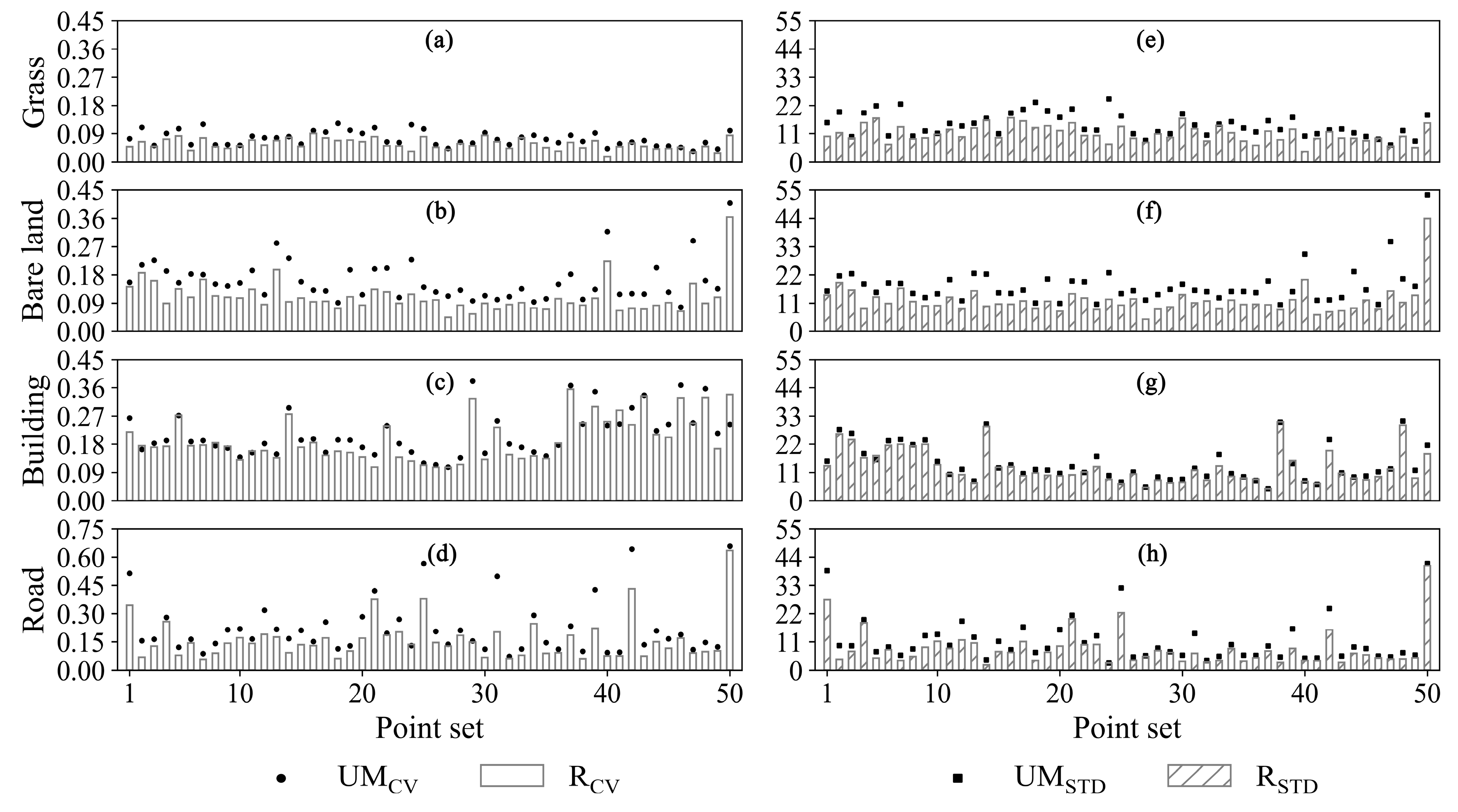
| Types | Max UMSTD | Max UMCV | Max RSTD | Max RCV |
|---|---|---|---|---|
| grass | 24.60 | 0.12 | 17.16 | 0.09 |
| road | 41.54 | 0.66 | 40.19 | 0.60 |
| building | 31.04 | 0.36 | 29.13 | 0.29 |
| bare land | 53.04 | 0.41 | 43.89 | 0.36 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, B.; Zheng, G.; Ju, W. The Local Median Filtering Method for Correcting the Laser Return Intensity Information from Discrete Airborne Laser Scanning Data. Remote Sens. 2020, 12, 1681. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101681
Wu B, Zheng G, Ju W. The Local Median Filtering Method for Correcting the Laser Return Intensity Information from Discrete Airborne Laser Scanning Data. Remote Sensing. 2020; 12(10):1681. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101681
Chicago/Turabian StyleWu, Bingxiao, Guang Zheng, and Weimin Ju. 2020. "The Local Median Filtering Method for Correcting the Laser Return Intensity Information from Discrete Airborne Laser Scanning Data" Remote Sensing 12, no. 10: 1681. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101681