
3D Mesh Pre-Processing Method Based on Feature Point Classification and Anisotropic Vertex Denoising Considering Scene Structure Characteristics


Abstract
:1. Introduction
2. Literature Review
2.1. Isotropic Mesh Filtering
2.2. Anisotropic Mesh Filtering
2.3. Conclusions of the Literature Review
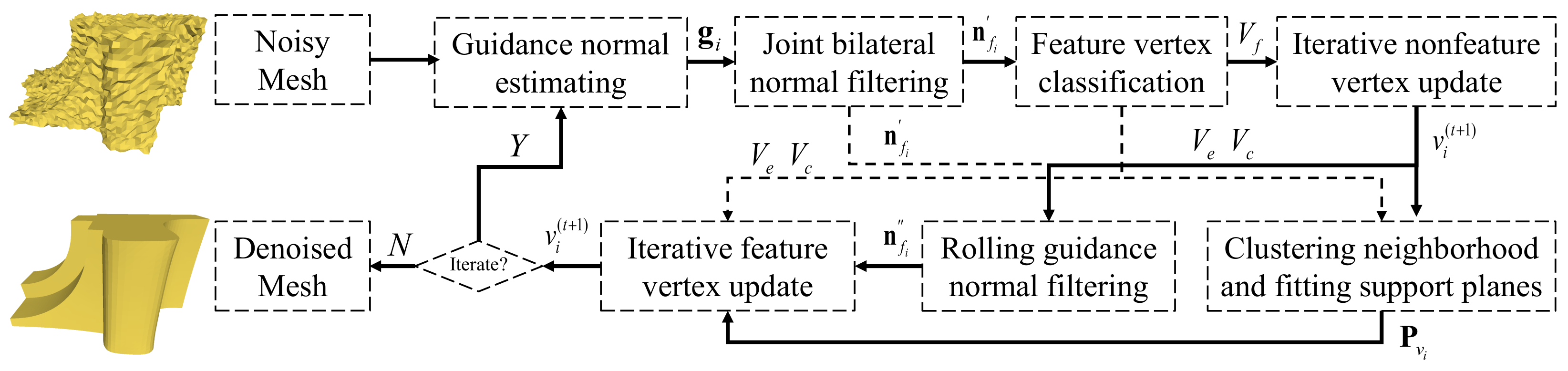
3. Methodology
3.1. Facet Normal Filtering
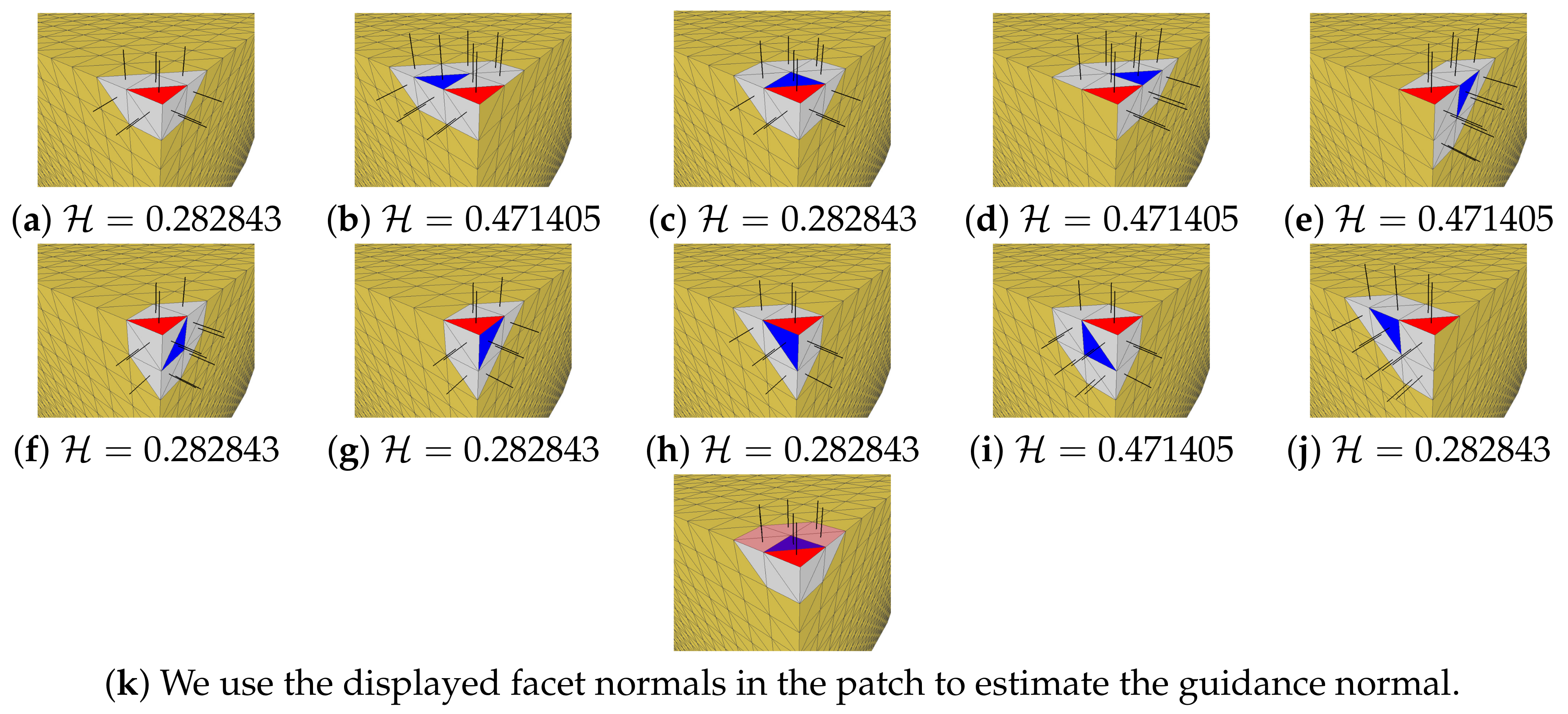
3.1.1. Guidance Normal Considering Corner Features
3.1.2. Joint Bilateral Normal Filtering
3.2. Feature Point Classification
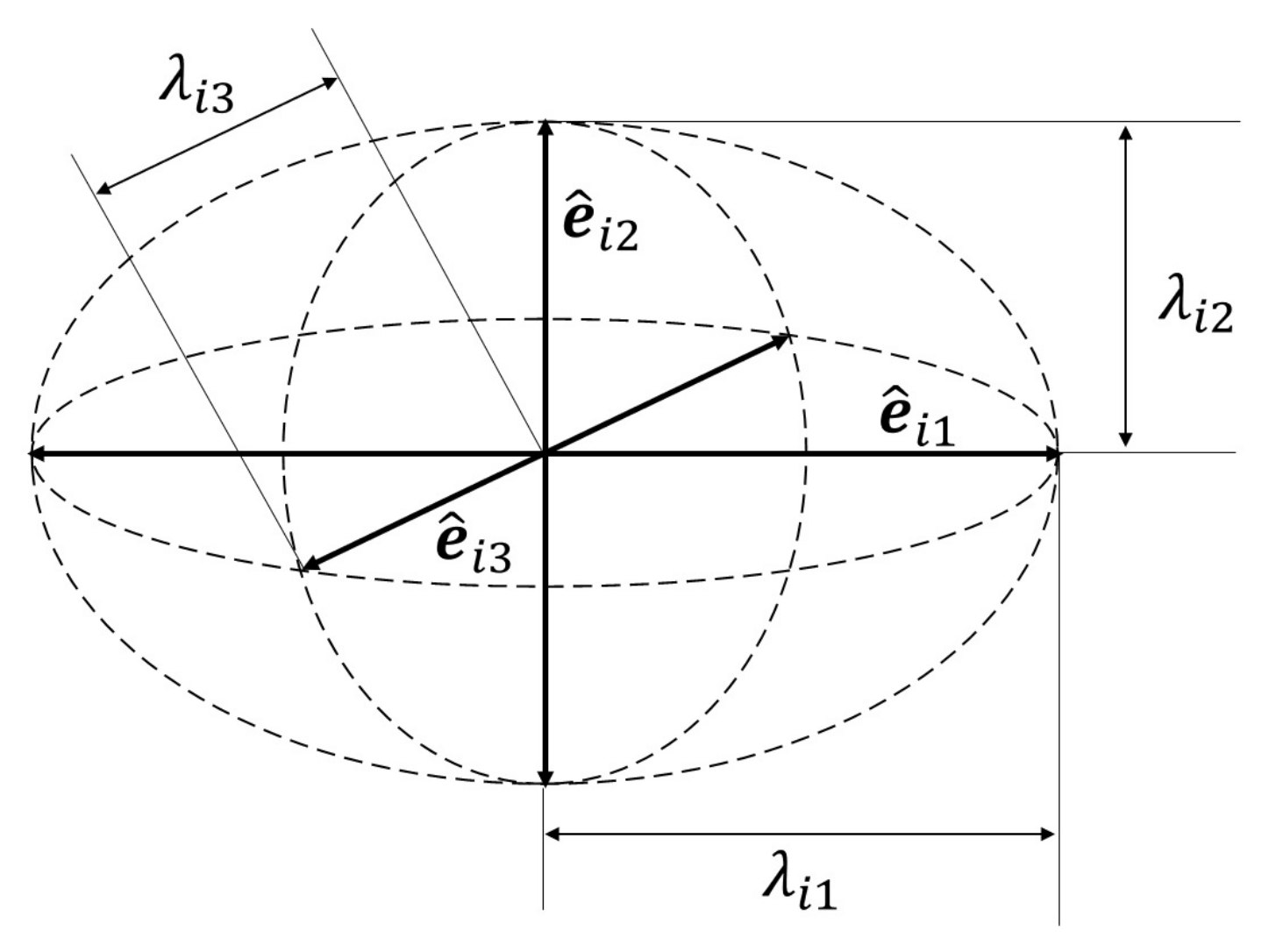
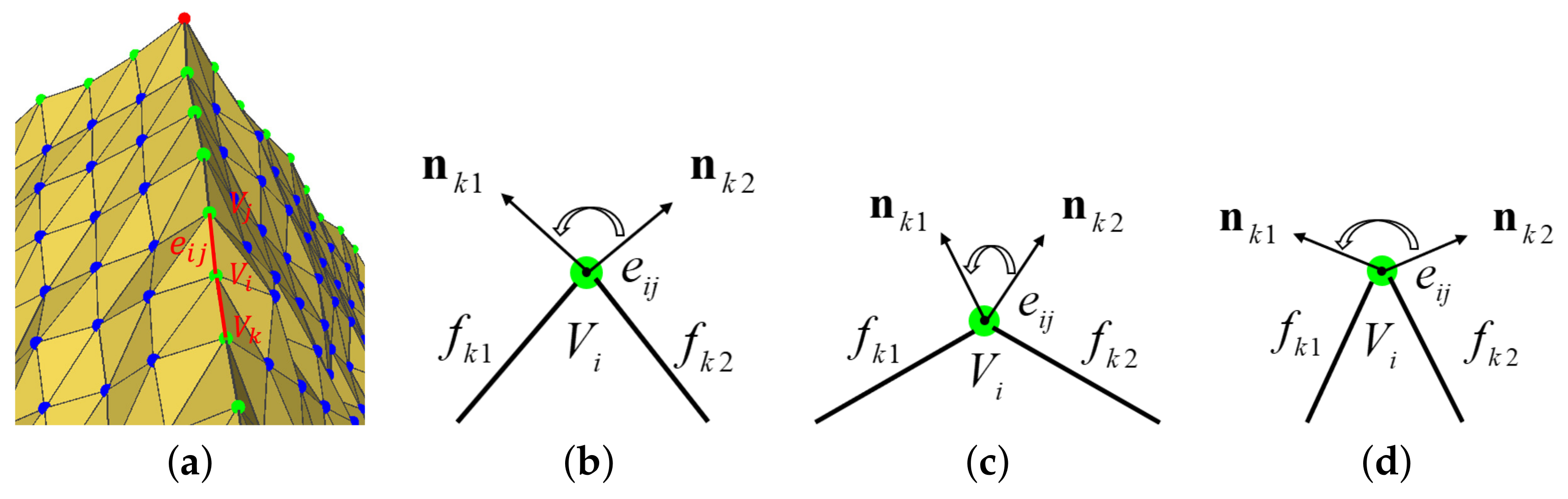
3.2.1. Feature Vertex Detection
3.2.2. Weak Feature Recognition and False Feature Elimination
3.3. Anisotropic Vertex Update
3.3.1. Non-Feature Vertex Update
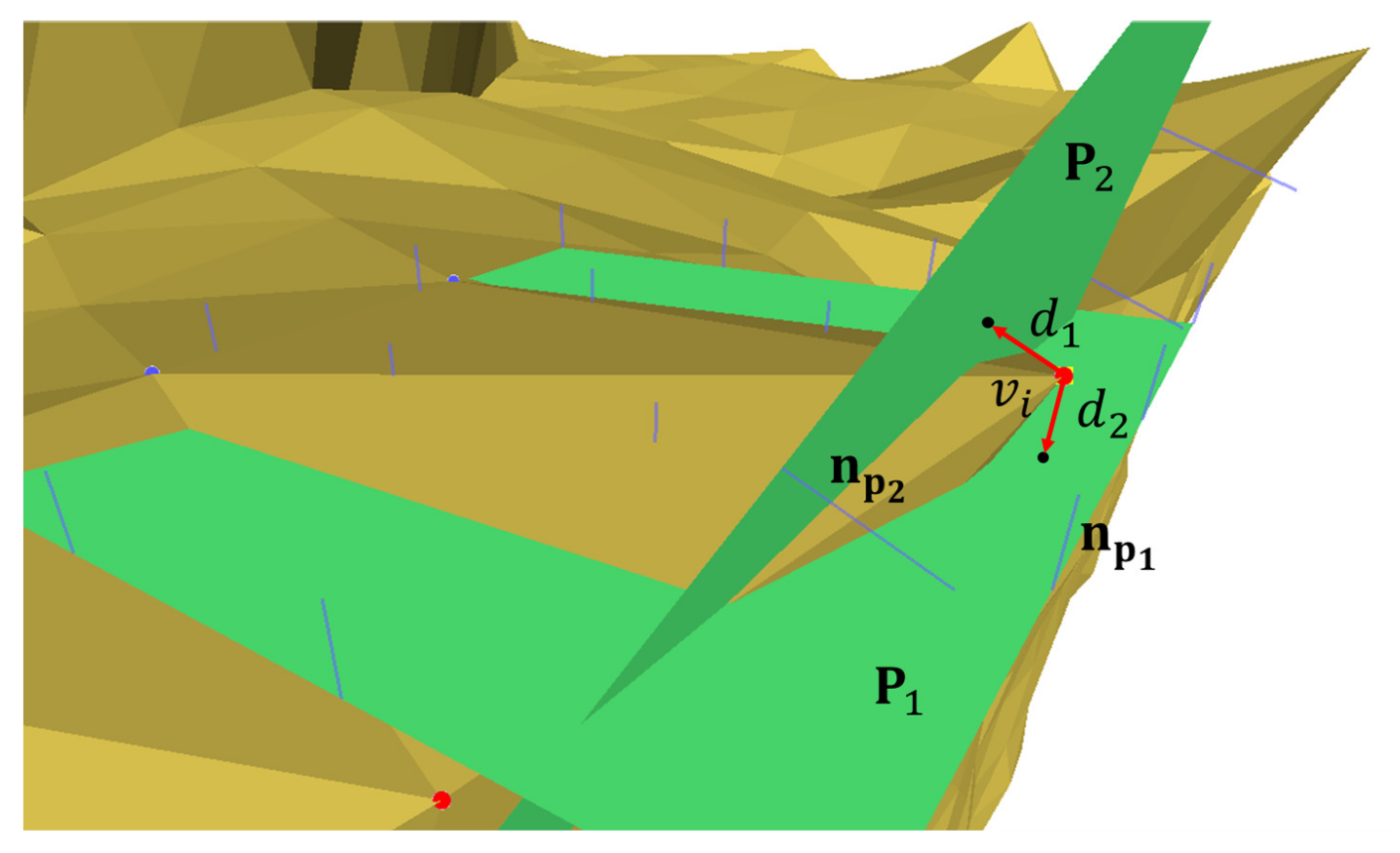
3.3.2. Feature Vertex Update
4. Results
4.1. Parameter Tuning
4.2. Qualitative Assessment Experiments
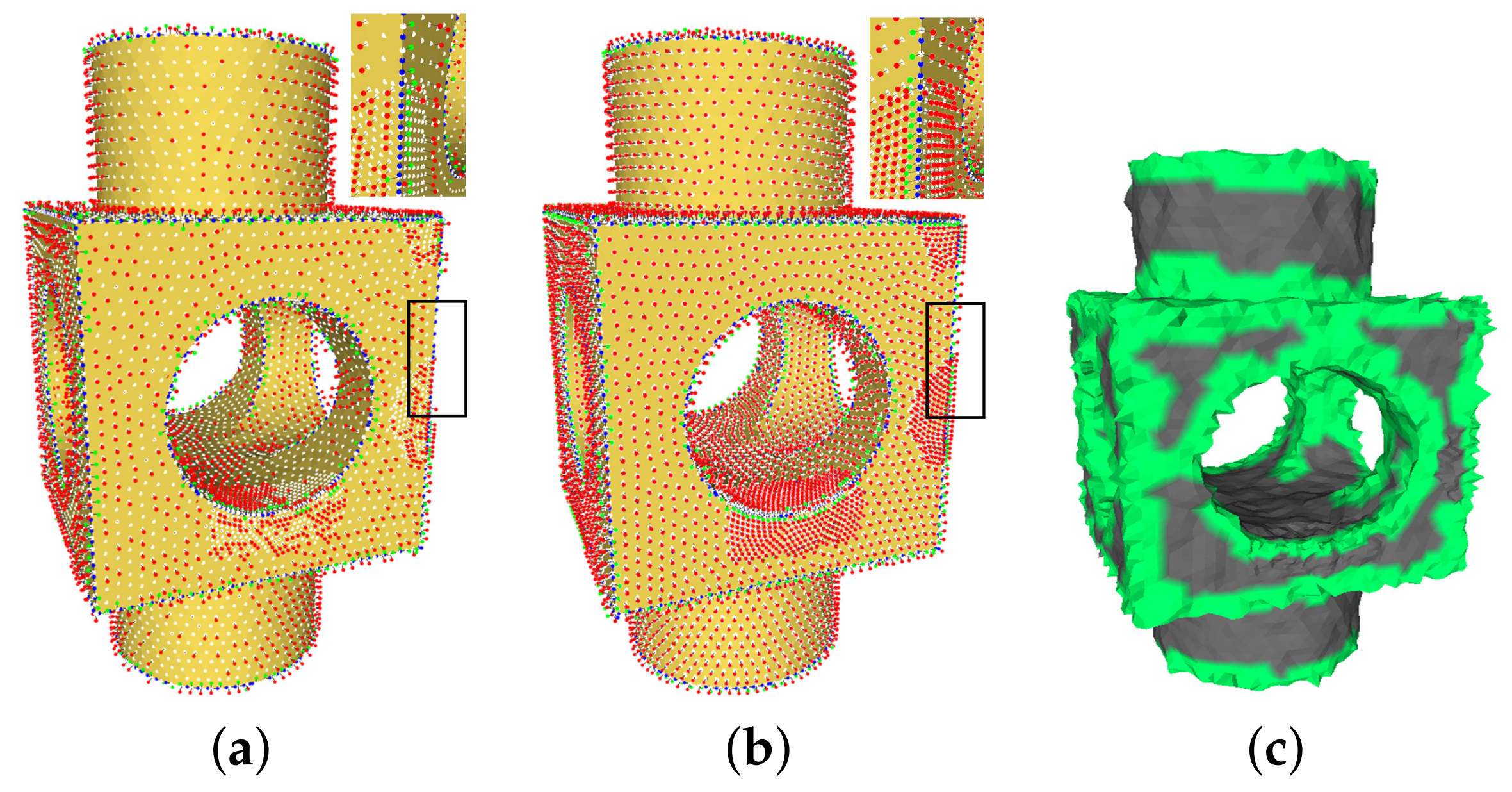
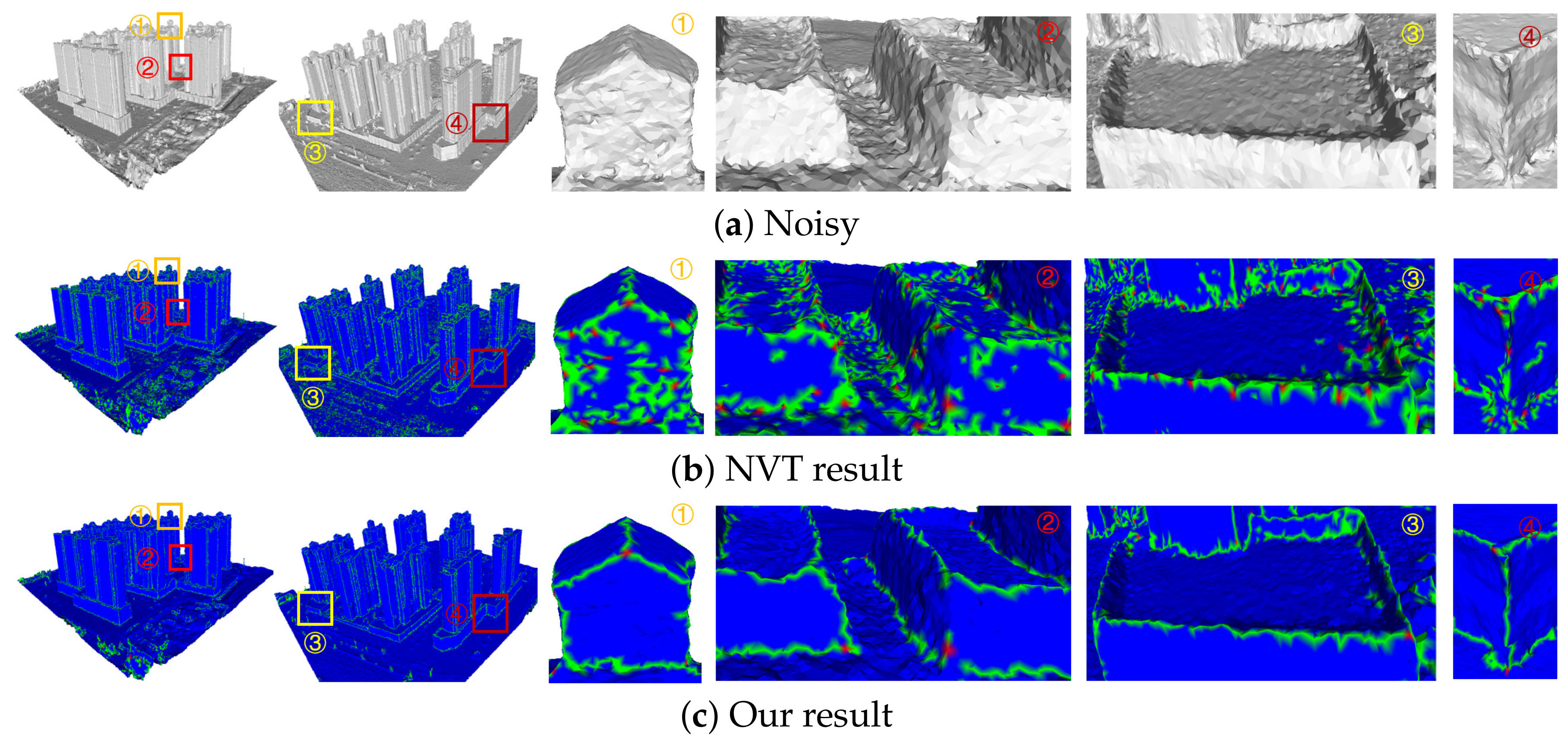
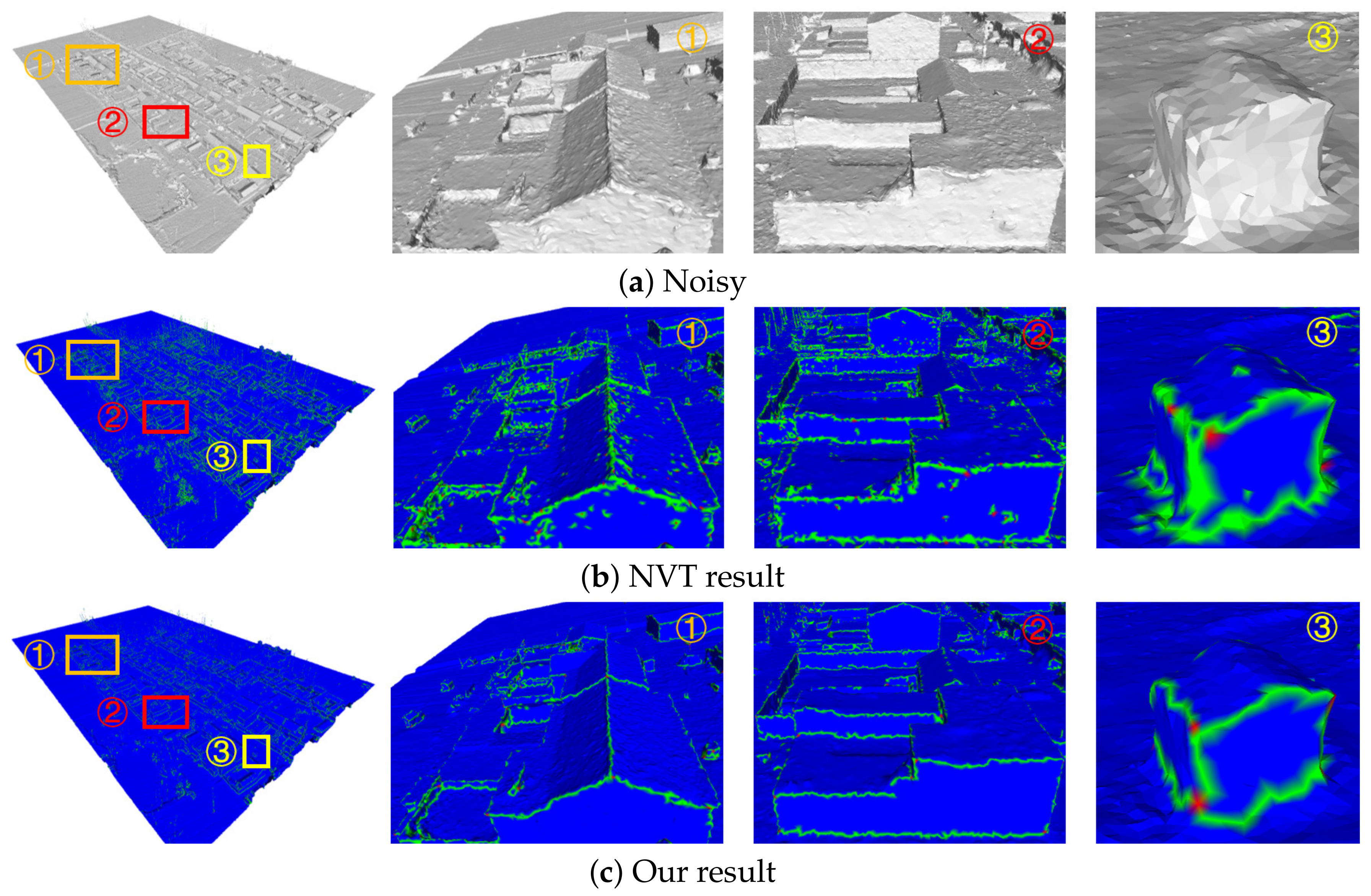
4.2.1. Qualitative Comparison of the Feature Vertex Classification Results
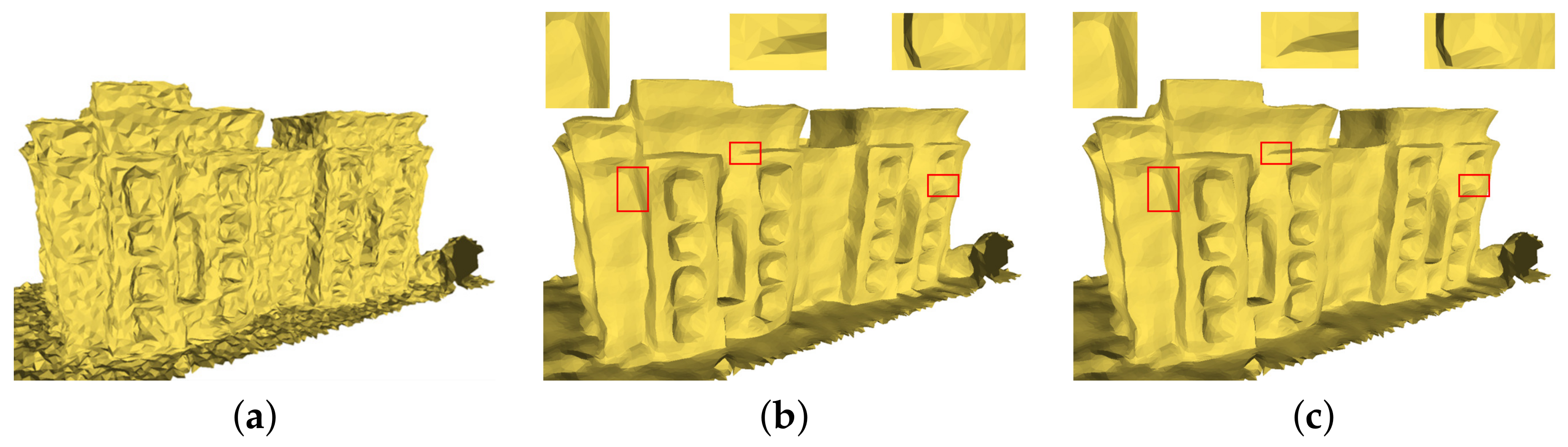
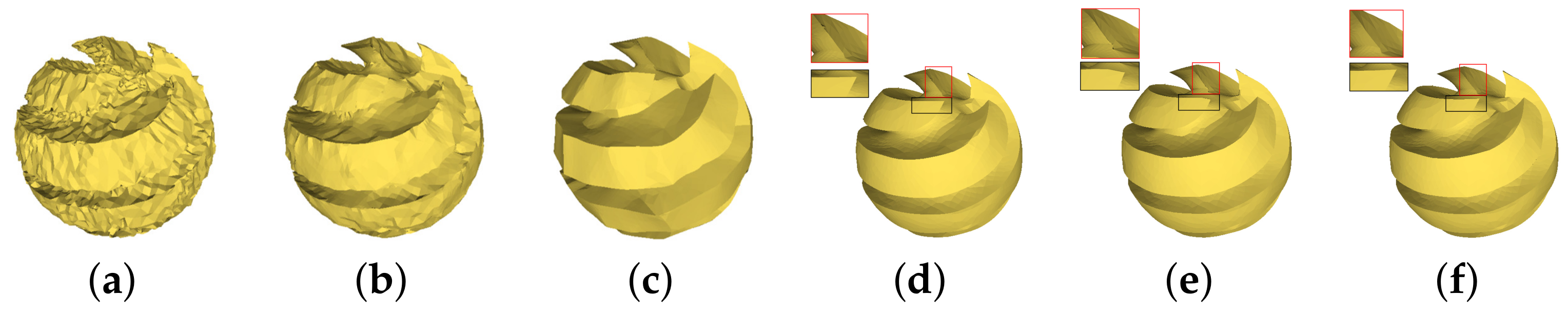
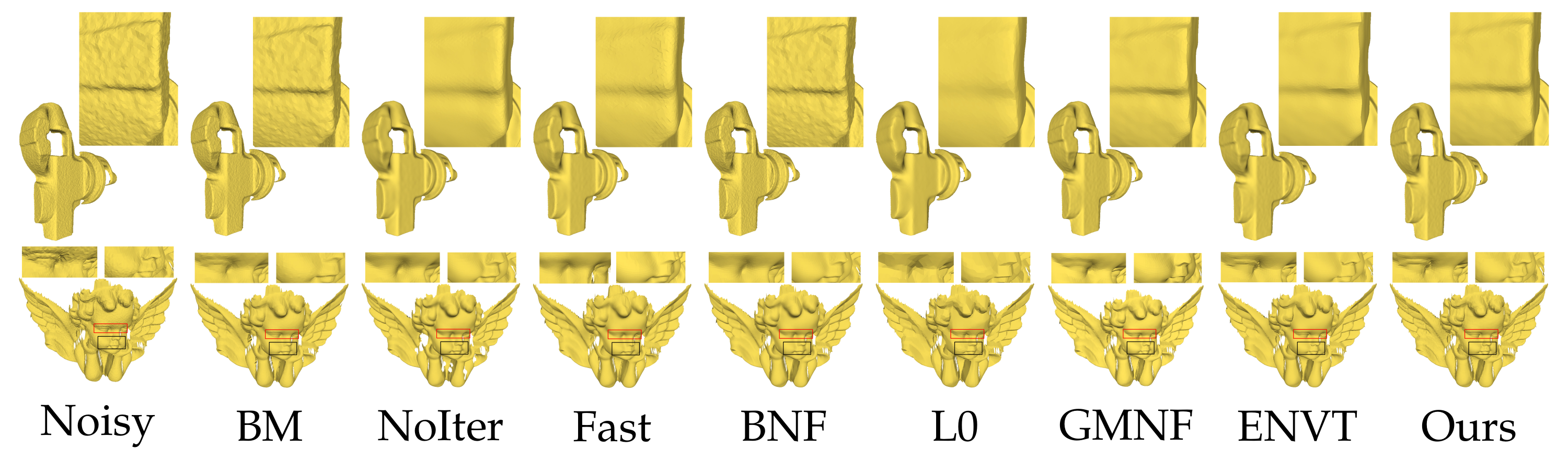
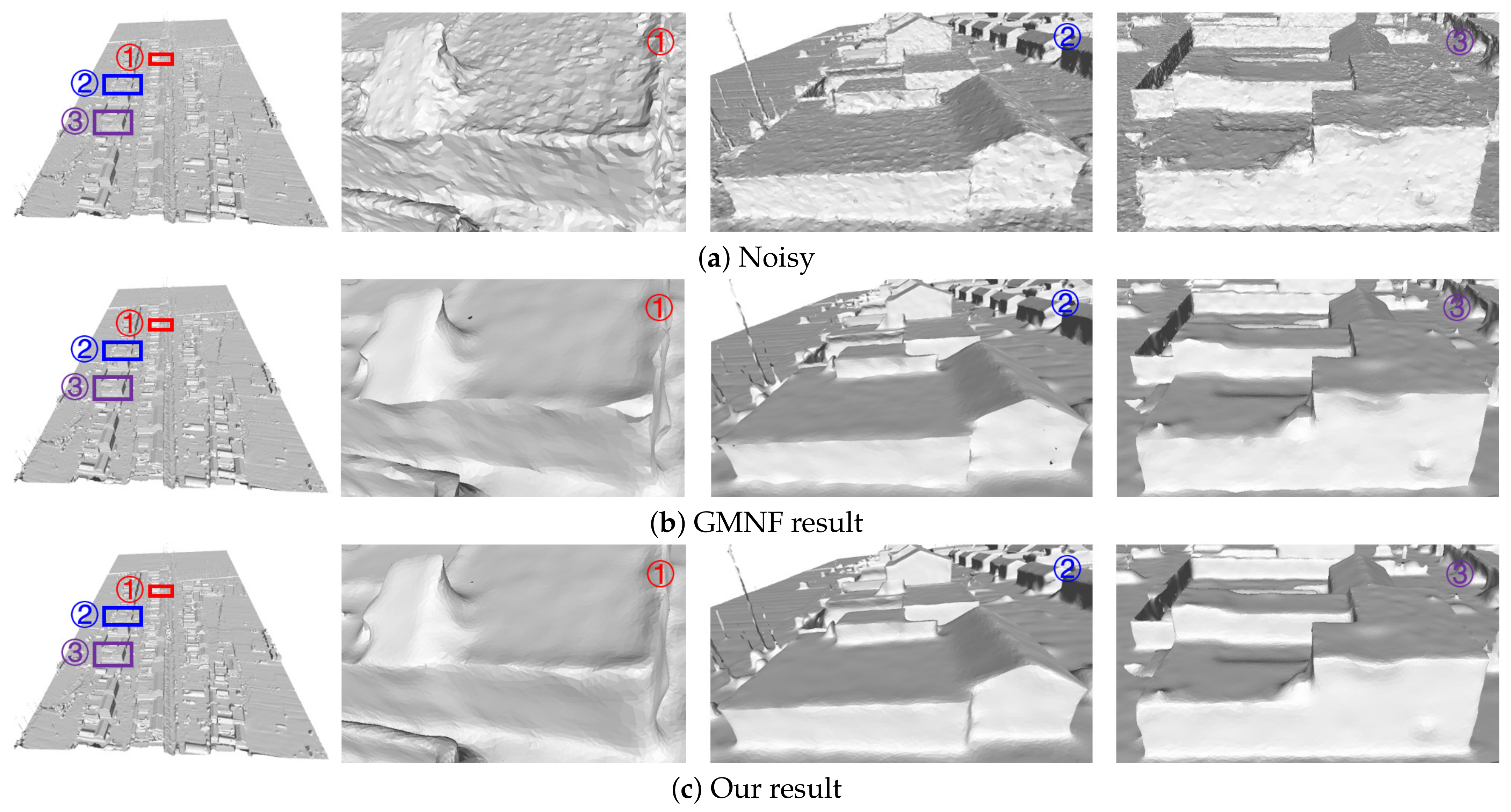
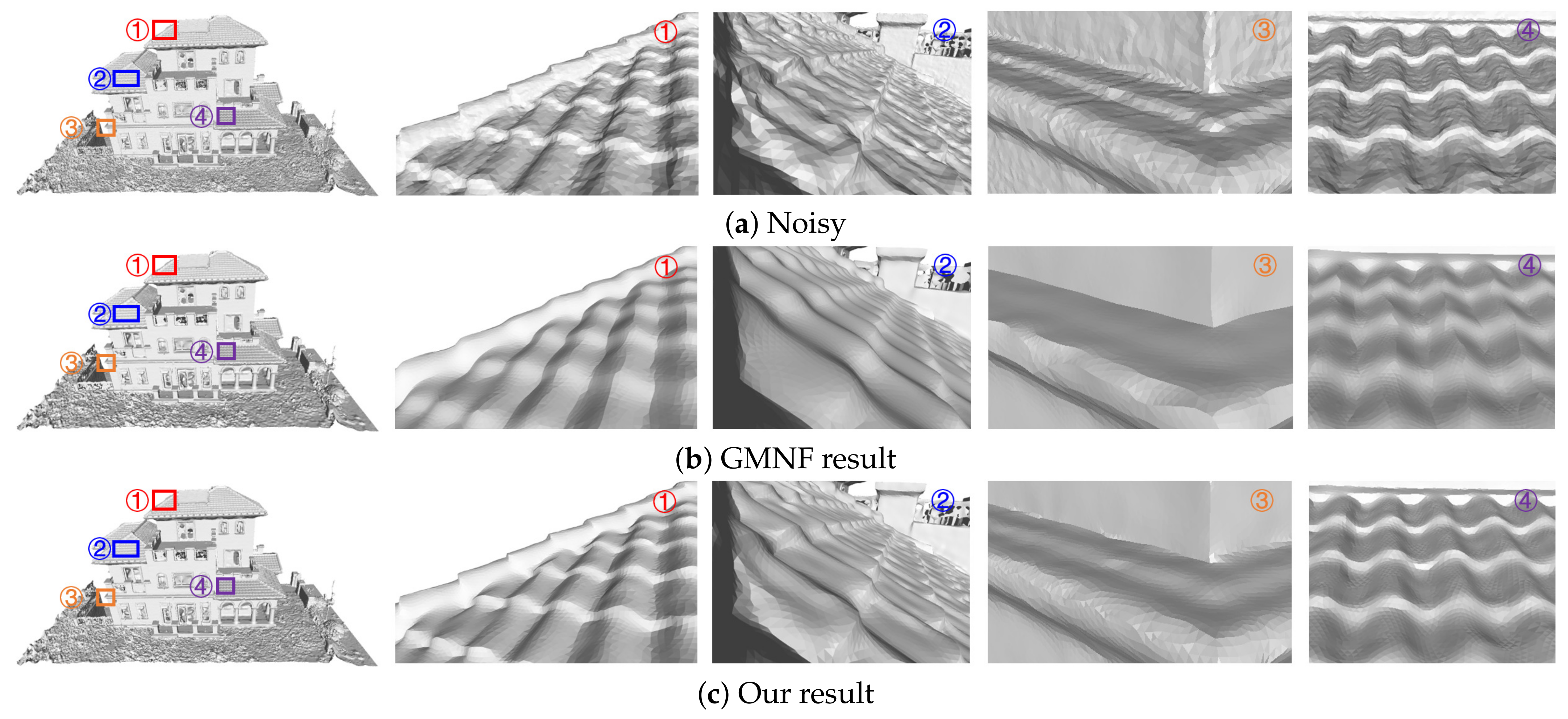
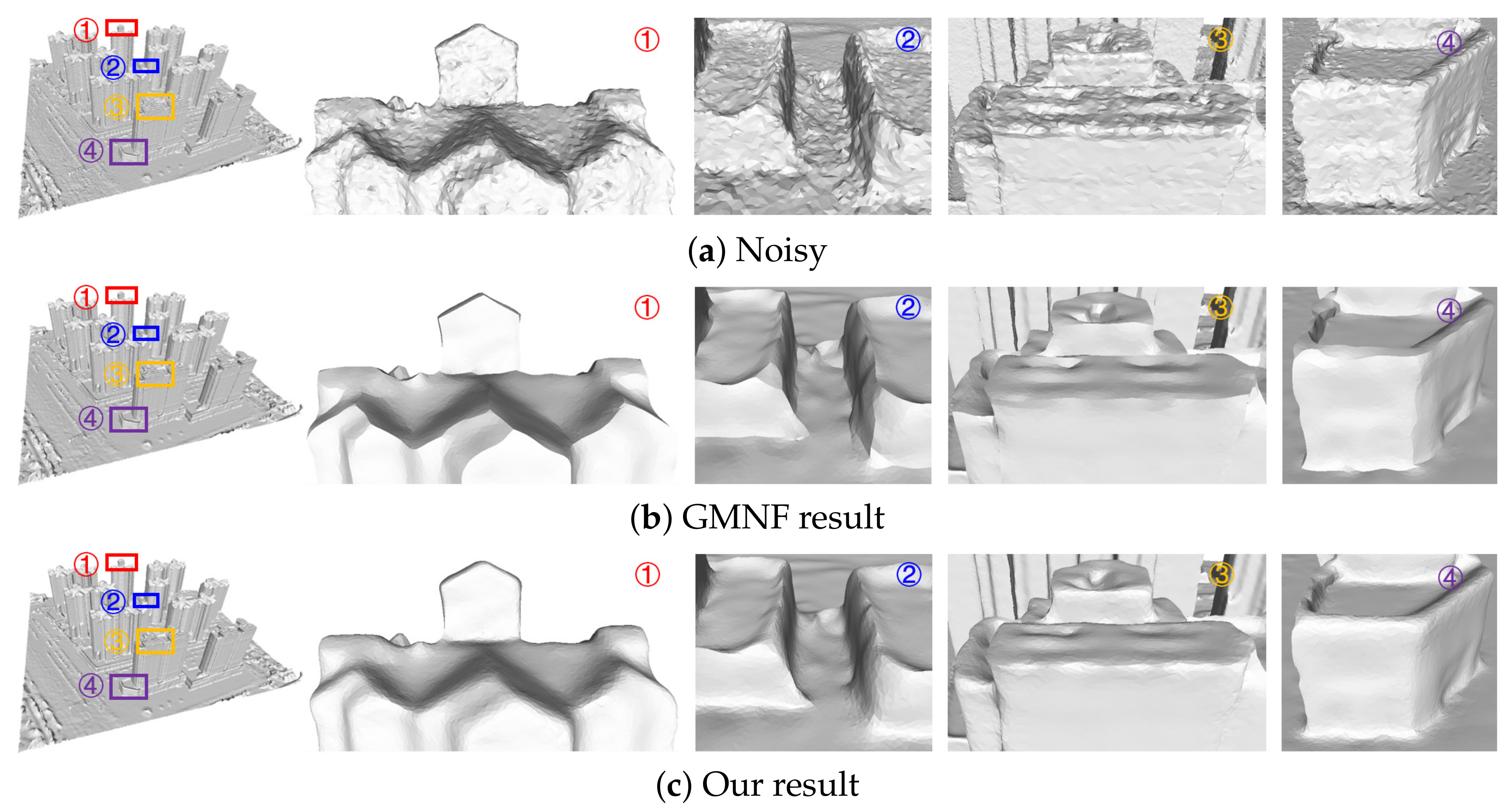
4.2.2. Qualitative Comparison of the Mesh Denoising Results
4.3. Quantitative Evaluation Experiments
4.3.1. Quantitative Comparison of the Normal Difference
4.3.2. Quantitative Comparison Of Distance
4.3.3. Quantitative Comparison of Running Time
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| NVT | Normal voting tensor |
| BM | The bilateral mesh denoising method [3] |
| NoIter | The noniterative, feature-preserving mesh smoothing method [27] |
| Fast | Fast and effective feature-preserving mesh denoising [28] |
| BNF | The local scheme of bilateral normal filtering method [4] |
| L0 | Mesh denoising via L0 minimization [23] |
| GMNF | Guided mesh normal filtering [5] |
| RoFi | Robust and high fidelity mesh denoising [32] |
| CPD | Constraint-based point set denoising [9] |
| ENVT | Mesh denoising based on normal voting tensor and binary optimization [45] |
References
- Ham, H.; Wesley, J.; Hendra, H. Computer vision based 3D reconstruction: A review. Int. J. Electr. Comput. Eng. 2019, 9, 2394. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, X.; Wang, S.; Fan, X.; Zhao, D. Graph-based feature-preserving mesh normal filtering. IEEE Comput. Archit. Lett. 2019, 1, 1. [Google Scholar] [CrossRef] [PubMed]
- Fleishman, S.; Drori, I.; Cohen-Or, D. Bilateral mesh denoising. In ACM Transactions on Graphics; Association for Computing Machinery: New York, NY, USA, 2003; pp. 950–953. [Google Scholar]
- Zheng, Y.; Fu, H.; Au, O.K.C.; Tai, C.L. Bilateral normal filtering for mesh denoising. IEEE Trans. Vis. Comput. Graph. 2010, 17, 1521–1530. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Deng, B.; Zhang, J.; Bouaziz, S.; Liu, L. Guided Mesh Normal Filtering. Comput. Graph. Forum. 2015, 34, 23–34. [Google Scholar] [CrossRef]
- Li, X.; Li, R.; Zhu, L.; Fu, C.W.; Heng, P.A. DNF-Net: A Deep Normal Filtering Network for Mesh Denoising. IEEE Trans. Vis. Comput. Graph. 2020, 70, 1. [Google Scholar] [CrossRef]
- Lu, X.; Deng, Z.; Chen, W. A robust scheme for feature-preserving mesh denoising. IEEE Trans. Vis. Comput. Graph. 2015, 22, 1181–1194. [Google Scholar] [CrossRef]
- Wei, M.; Liang, L.; Pang, W.M.; Wang, J.; Li, W.; Wu, H. Tensor voting guided mesh denoising. IEEE Trans. Autom. Sci. Eng. 2016, 14, 931–945. [Google Scholar] [CrossRef]
- Yadav, S.K.; Reitebuch, U.; Skrodzki, M.; Zimmermann, E.; Polthier, K. Constraint-based point set denoising using normal voting tensor and restricted quadratic error metrics. Comput. Graph. 2018, 74, 234–243. [Google Scholar] [CrossRef]
- Field, D.A. Laplacian smoothing and Delaunay triangulations. Commun. Appl. Numer. Methods 1988, 4, 709–712. [Google Scholar] [CrossRef]
- Vollmer, J.; Mencl, R.; Mueller, H. Improved Laplacian Smoothing of Noisy Surface Meshes. Comput. Graph. Forum 1999, 18, 131–138. [Google Scholar] [CrossRef]
- Taubin, G. A signal processing approach to fair surface design. In Proceedings of the 22nd Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 1995, Los Angeles, CA, USA, 6–11 August 1995; pp. 351–358. [Google Scholar]
- Desbrun, M.; Meyer, M.; Schröder, P.; Barr, A.H. Implicit fairing of irregular meshes using diffusion and curvature flow. In Proceedings of the 26th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 8–13 August 1999; pp. 317–324. [Google Scholar]
- Ohtake, Y.; Belyaev, A.G.; Bogaevski, I.A. Polyhedral surface smoothing with simultaneous mesh regularization. In Proceedings of the IEEE Proceedings Geometric Modeling and Processing 2000, Theory and Applications, Hong Kong, China, 10–12 April 2020; pp. 229–237. [Google Scholar]
- Zhang, H.; Van Kaick, O.; Dyer, R. Spectral Mesh Processing. Comput. Graph. Forum 2010, 29, 1865–1894. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.S.; Liu, Y.; Tong, X. Mesh denoising via cascaded normal regression. ACM Trans. Graph. 2016, 35, 232. [Google Scholar] [CrossRef]
- Liu, L.; Tai, C.L.; Ji, Z.; Wang, G. Non-iterative approach for global mesh optimization. Comput.-Aided Des. 2007, 39, 772–782. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Zheng, J.; Cai, Y.; Fu, C.W. Mesh Denoising Using Extended ROF Model with L1 Fidelity. Comput. Graph. Forum 2015, 34, 35–45. [Google Scholar] [CrossRef]
- Lu, X.; Chen, W.; Schaefer, S. Robust mesh denoising via vertex pre-filtering and l1-median normal filtering. Comput. Aided Geom. Des. 2017, 54, 49–60. [Google Scholar] [CrossRef]
- Liu, Z.; Lai, R.; Zhang, H.; Wu, C. Triangulated surface denoising using high order regularization with dynamic weights. SIAM J. Sci. Comput. 2019, 41, B1–B26. [Google Scholar] [CrossRef]
- Zhong, S.; Xie, Z.; Liu, J.; Liu, Z. Robust mesh denoising via triple sparsity. Sensors 2019, 19, 1001. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ohtake, Y.; Belyaev, A.; Bogaevski, I. Mesh regularization and adaptive smoothing. Comput.-Aided Des. 2001, 33, 789–800. [Google Scholar] [CrossRef]
- He, L.; Schaefer, S. Mesh denoising via L 0 minimization. ACM Trans. Graph. (TOG) 2013, 32, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.; Yang, Z.; Liu, L.; Deng, J.; Chen, F. Decoupling noise and features via weighted L1-analysis compressed sensing. ACM Trans. Graph. (TOG) 2014, 33, 1–12. [Google Scholar]
- Tomasi, C.; Manduchi, R. Bilateral filtering for gray and color images. In Proceedings of the Sixth International Conference on Computer Vision (IEEE Cat. No. 98CH36271), IEEE, Bombay, India, 4–7 January 1998; pp. 839–846. [Google Scholar]
- Durand, F.; Dorsey, J. Fast bilateral filtering for the display of high-dynamic-range images. In Proceedings of the 29th Annual Conference on Computer Graphics and Interactive Techniques, San Antonio, TX, USA, 23–26 July 2002; pp. 257–266. [Google Scholar]
- Jones, T.R.; Durand, F.; Desbrun, M. Non-Iterative, Feature-Preserving Mesh Smoothing. In Proceedings of the ACM SIGGRAPH 2003 Papers, San Diego, CA, USA, 27–31 July 2003; pp. 943–949. [Google Scholar]
- Sun, X.; Rosin, P.L.; Martin, R.; Langbein, F. Fast and effective feature-preserving mesh denoising. IEEE Trans. Vis. Comput. Graph. 2007, 13, 925–938. [Google Scholar] [CrossRef]
- Wang, P.S.; Fu, X.M.; Liu, Y.; Tong, X.; Liu, S.L.; Guo, B. Rolling guidance normal filter for geometric processing. ACM Trans. Graph. (TOG) 2015, 34, 1–9. [Google Scholar] [CrossRef]
- Zhang, J.; Deng, B.; Hong, Y.; Peng, Y.; Qin, W.; Liu, L. Static/dynamic filtering for mesh geometry. IEEE Trans. Vis. Comput. Graph. 2018, 25, 1774–1787. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, T.; Wang, J.; Liu, H.; Liu, L.G. Efficient mesh denoising via robust normal filtering and alternate vertex updating. Front. Inf. Technol. Electron. Eng. 2017, 18, 1828–1842. [Google Scholar] [CrossRef]
- Yadav, S.K.; Reitebuch, U.; Polthier, K. Robust and high fidelity mesh denoising. IEEE Trans. Vis. Comput. Graph. 2018, 25, 2304–2310. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, X.; Liu, X.; Deng, Z.; Chen, W. An efficient approach for feature-preserving mesh denoising. Opt. Lasers Eng. 2017, 90, 186–195. [Google Scholar] [CrossRef]
- Guo, M.; Song, Z.; Han, C.; Zhong, S.; Lv, R.; Liu, Z. Mesh Denoising via Adaptive Consistent Neighborhood. Sensors 2021, 21, 412. [Google Scholar] [CrossRef]
- Wei, M.; Huang, J.; Xie, X.; Liu, L.; Wang, J.; Qin, J. Mesh denoising guided by patch normal co-filtering via kernel low-rank recovery. IEEE Trans. Vis. Comput. Graph. 2018, 25, 2910–2926. [Google Scholar] [CrossRef]
- Wang, J.; Huang, J.; Wang, F.L.; Wei, M.; Xie, H.; Qin, J. Data-driven geometry-recovering mesh denoising. Comput.-Aided Des. 2019, 114, 133–142. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, X.; Zhao, Y.; Fan, X.; Zhao, D. Normalnet: Learning based guided normal filtering for mesh denoising. arXiv 2019, arXiv:1903.04015. [Google Scholar]
- Arvanitis, G.; Lalos, A.S.; Moustakas, K. Image-Based 3D MESH Denoising Through A Block Matching 3D Convolutional Neural Network Filtering Approach. In Proceedings of the 2020 IEEE International Conference on Multimedia and Expo (ICME), London, UK, 6–10 July 2020; pp. 1–6. [Google Scholar]
- Armando, M.; Franco, J.S.; Boyer, E. Mesh Denoising with Facet Graph Convolutions. IEEE Trans. Vis. Comput. Graph. 2020, 99. [Google Scholar] [CrossRef]
- Taubin, G. Estimating the tensor of curvature of a surface from a polyhedral approximation. In Proceedings of the IEEE International Conference on Computer Vision, IEEE, Cambridge, MA, USA, 20–23 June 1995; pp. 902–907. [Google Scholar]
- Cohen-Steiner, D.; Morvan, J.M. Restricted delaunay triangulations and normal cycle. In Proceedings of the Nineteenth Annual Symposium on Computational Geometry, San Diego, CA, USA, 8–10 June 2003; pp. 312–321. [Google Scholar]
- Feng, Y.; Feng, Y.; You, H.; Zhao, X.; Gao, Y. MeshNet: Mesh neural network for 3D shape representation. In Proceedings of the AAAI Conference on Artificial Intelligence, Hilton Hawaiian Village, Honolulu, HI, USA, 27 January–1 February 2019; pp. 8279–8286. [Google Scholar]
- Medioni, G.; Tang, C.K.; Lee, M.S. Tensor voting: Theory and applications. In Proceedings of the RFIA, Paris, France, 1–3 February 2000. [Google Scholar]
- Wang, X.C.; Cao, J.J.; Liu, X.P.; Li, B.J.; Shi, X.Q.; Sun, Y.Z. Feature detection of triangular meshes via neighbor supporting. J. Zhejiang Univ. Sci. C 2012, 13, 440–451. [Google Scholar] [CrossRef]
- Yadav, S.K.; Reitebuch, U.; Polthier, K. Mesh denoising based on normal voting tensor and binary optimization. IEEE Trans. Vis. Comput. Graph. 2017, 24, 2366–2379. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, H.; Chen, K.; Zhang, W.; Qin, C.; Yu, N. Feature-preserving tensor voting model for mesh steganalysis. IEEE Trans. Vis. Comput. Graph. 2019, 27, 57–67. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, H.S.; Choi, H.K.; Lee, K.H. Feature detection of triangular meshes based on tensor voting theory. Comput.-Aided Des. 2009, 41, 47–58. [Google Scholar] [CrossRef]
- Shannon, C.E. Communication in the presence of noise. Proc. IRE 1949, 37, 10–21. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Glossary |
|---|---|
| Face i, | |
| Area of face i | |
| Centroid of face i | |
| Vertex i | |
| New coordinate of vertex i in the iteration | |
| Normal vector for face i | |
| Filtered normal of face i for the first time in each iteration | |
| Filtered normal of face i for the second time in each iteration | |
| Guidedance normal vector for face i | |
| The patch of the face | |
| Dual weight function | |
| Set of neighboring faces of face i | |
| Set of neighboring faces of vertex i | |
| Set of isotropic neighbor faces of vertex i | |
| Tensor voting matrix based on the normals at vertex i | |
| Normal voting component of the face | |
| Eigenvalue of , | |
| Unit eigenvector of , | |
| Feature classification threshold | |
| Set of non-feature vertices | |
| Set of shape edge vertices | |
| Set of corner vertices | |
| Normal angle threshold | |
| The supported neighborhood of feature point , | |
| The supported plane of feature point | |
| Set of supported planes of feature point | |
| Dihedral angle constraint threshold, | |
| Coefficients of the constraint terms, , | |
| The spatial kernel | |
| The range kernel | |
| Variance parameter of | |
| Variance parameter of | |
| Average facet normal difference between the denoised mesh and the ground-truth mesh | |
| Maximum distance from the resulting mesh vertices to the ground-truth mesh surface | |
| Average distance from the resulting mesh vertices to the ground-truth mesh surface | |
| Number of iteration filtering facet normals, total number of iterations | |
| Number of times the vertices are updated in each iteration |
| Model | Noisy | BM [3] | NoIter [27] | Fast [28] | BNF [4] | L0 [23] | GMNF [5] | RoFi [32] | Ours |
|---|---|---|---|---|---|---|---|---|---|
| Block | 33.7185 | 14.4753 | 13.8501 | 14.4753 | 5.30624 | 4.97352 | 3.77320 | 5.22034 | 3.18393 |
| Fandisk | 28.4211 | 11.1113 | 9.81795 | 4.04264 | 3.34944 | 5.52852 | 2.62181 | 2.44769 | 1.37350 |
| SharpSphere | 33.0070 | 16.7373 | 17.3618 | 11.8920 | 6.70474 | 12.9565 | 9.53772 | 9.05684 | 8.43270 |
| Julius | 23.9629 | 10.2910 | 7.63005 | 7.01017 | 6.00205 | 7.97741 | 6.50926 | 7.70099 | 6.42512 |
| Cube | 21.0551 | 8.71710 | 7.48375 | 2.02613 | 1.38315 | 1.82864 | 0.69145 | 2.42332 | 0.593294 |
| Pyramid | 19.2730 | 5.81730 | 4.66767 | 0.68221 | 0.84914 | 3.51391 | 0.51771 | 1.35993 | 0.504128 |
| jointSharpEdges | 33.6741 | 13.7765 | 13.2518 | 10.5136 | 8.25214 | 2.13461 | 3.35048 | 2.47633 | 2.28357 |
| Model | Noisy | BM [3] | NoIter [27] | Fast [28] | BNF [4] | L0 [23] | GMNF [5] | RoFi [32] | Ours |
|---|---|---|---|---|---|---|---|---|---|
| Block | 1.24700 | 0.86231 | 0.68534 | 0.60524 | 0.60328 | 0.60257 | 0.30105 | 0.60313 | 0.30061 |
| Fandisk | 0.12625 | 0.08283 | 0.08349 | 0.05911 | 0.05895 | 0.08276 | 0.04153 | 0.04161 | 0.04150 |
| SharpSphere | 0.45456 | 0.44946 | 0.33997 | 0.44865 | 0.22433 | 0.33649 | 0.33760 | 0.39257 | 0.33257 |
| Julius | 0.00792 | 0.00790 | 0.00790 | 0.00789 | 0.00790 | 0.00790 | 0.00790 | 0.00789 | 0.00788 |
| Cube | 0.08521 | 0.06631 | 0.04955 | 0.03227 | 0.01602 | 0.06350 | 0.02119 | 0.03186 | 0.01589 |
| Pyramid | 0.03197 | 0.02104 | 0.02125 | 0.01587 | 0.01587 | 0.03156 | 0.01590 | 0.01578 | 0.01583 |
| jointSharpEdges | 0.02117 | 0.01793 | 0.01194 | 0.01181 | 0.01181 | 0.01177 | 0.01181 | 0.00884 | 0.01179 |
| Model | Noisy | BM [3] | NoIter [27] | Fast [28] | BNF [4] | L0 [23] | GMNF [5] | RoFi [32] | Ours |
|---|---|---|---|---|---|---|---|---|---|
| Block | 0.19502 | 0.08608 | 0.08632 | 0.05385 | 0.03436 | 0.13168 | 0.03559 | 0.11360 | 0.01988 |
| Fandisk | 0.02151 | 0.00842 | 0.01017 | 0.00424 | 0.00321 | 0.01345 | 0.00457 | 0.00447 | 0.00118 |
| SharpSphere | 0.06948 | 0.02864 | 0.03005 | 0.03235 | 0.00773 | 0.06397 | 0.01811 | 0.02110 | 0.01455 |
| Julius | 0.00022 | 0.00004 | 0.00005 | 0.00002 | 0.00004 | 0.00004 | 0.00002 | 0.00003 | 0.00001 |
| Cube | 0.01892 | 0.00954 | 0.01109 | 0.00437 | 0.00177 | 0.01029 | 0.00483 | 0.00605 | 0.00526 |
| Pyramid | 0.00292 | 0.00104 | 0.00203 | 0.00015 | 0.00015 | 0.00102 | 0.00001 | 0.00010 | 0.00000 |
| jointSharpEdges | 0.00338 | 0.00091 | 0.00112 | 0.00075 | 0.00078 | 0.00122 | 0.00085 | 0.00029 | 0.00028 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Guo, B.; Xiao, X.; Qiu, W. 3D Mesh Pre-Processing Method Based on Feature Point Classification and Anisotropic Vertex Denoising Considering Scene Structure Characteristics. Remote Sens. 2021, 13, 2145. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13112145
Liu Y, Guo B, Xiao X, Qiu W. 3D Mesh Pre-Processing Method Based on Feature Point Classification and Anisotropic Vertex Denoising Considering Scene Structure Characteristics. Remote Sensing. 2021; 13(11):2145. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13112145
Chicago/Turabian StyleLiu, Yawen, Bingxuan Guo, Xiongwu Xiao, and Wei Qiu. 2021. "3D Mesh Pre-Processing Method Based on Feature Point Classification and Anisotropic Vertex Denoising Considering Scene Structure Characteristics" Remote Sensing 13, no. 11: 2145. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13112145