
Applying a Hand-Held Laser Scanner to Monitoring Gully Erosion: Workflow and Evaluation

 , and
, and
Abstract
:
1. Introduction
1.1. Purpose and Context of Study
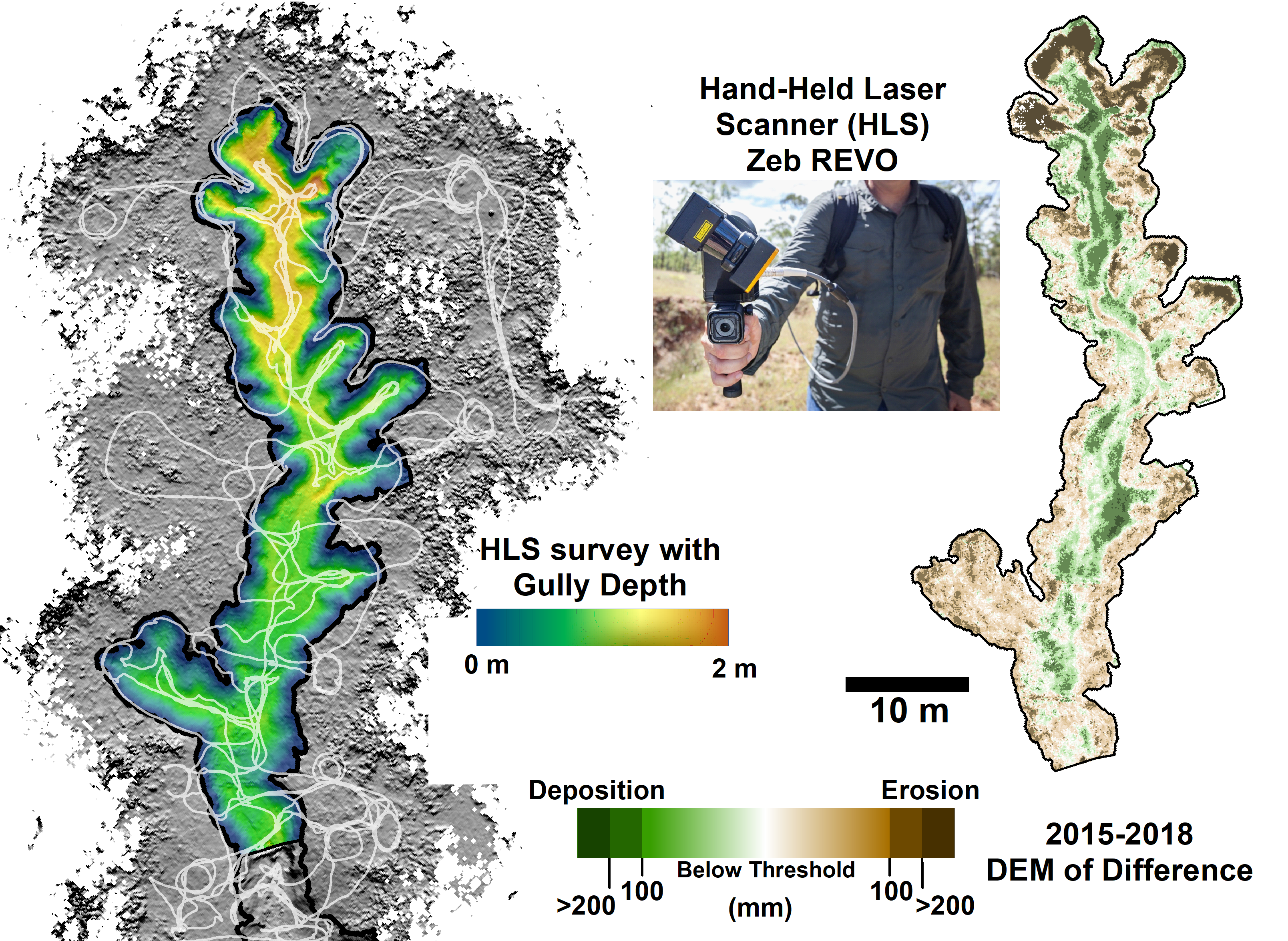
1.2. Field Site
2. Materials and Methods
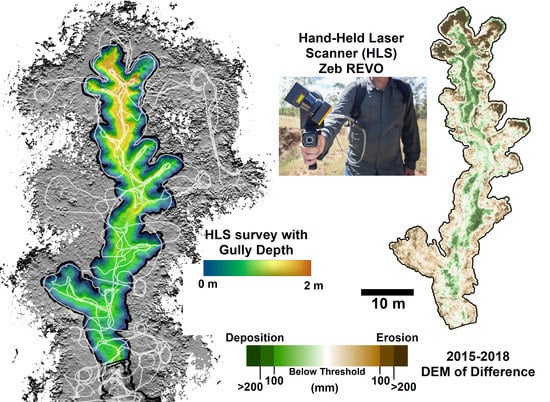
2.1. Hand-Held Laser Scanners (HLS)
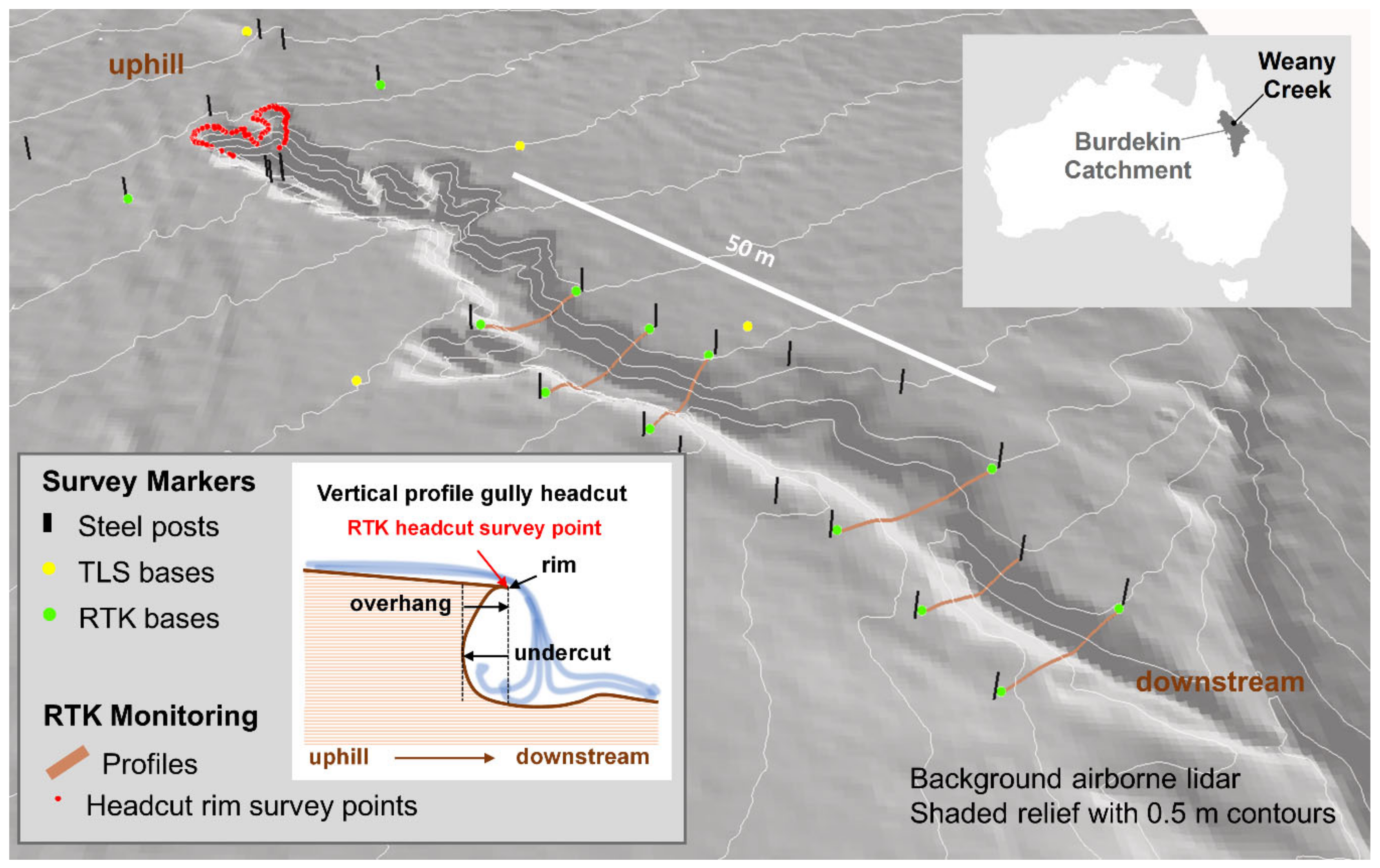
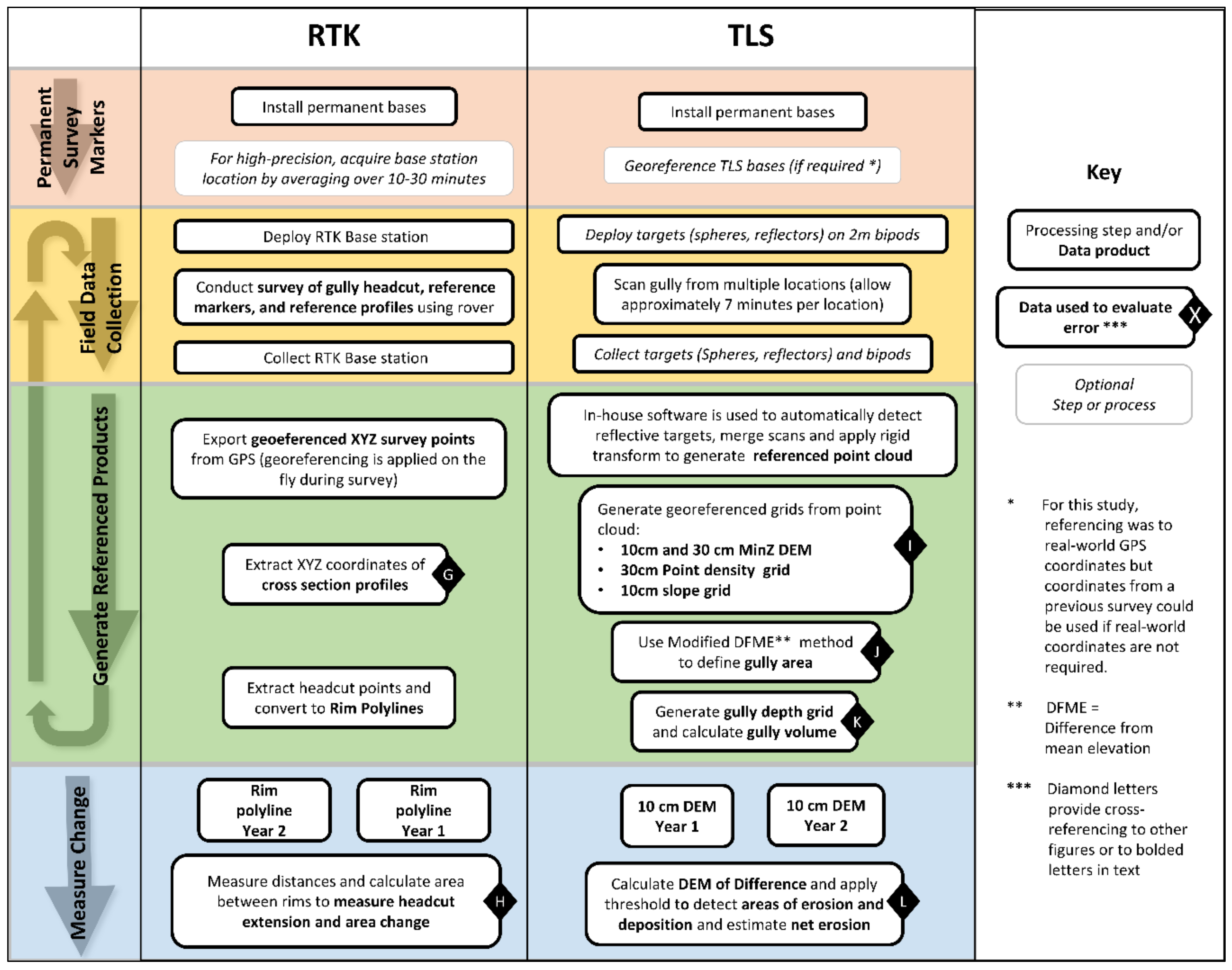
2.2. HLS Workflow for Gully Analysis
2.2.1. Survey Markers and Annual Field Data Collection
2.2.2. Referenced Gridded Products and the GIS Method
- 10 cm grid of the minimum Z value within each grid cell (10 cm DEM) as a detailed representation of the ground surface. Minimum point density of 10 points per grid cell is assumed sufficient to detect at least one ground point, although this DEM will contain vegetation artifacts around the periphery (DEM inset in Figure 2) where tall features such as trees may enhance point density but scanner is not reliably detecting ground due to the flat angle of scan.
- 30 cm grid of the minimum Z value within each grid cell (30 cm DEM) for use where the 10 cm DEM is noisy (due to dense vegetation) around a survey markers and for derivation gully area.
- Elevation range grid representing the range of 10 cm DEM values in a 3 × 3 grid cell area. This was used as an indicator of reliability of ground detection near survey markers.
- Point density (count) grid at 2 cm resolution for detection of survey markers
- Point density (count) grid at 30 cm resolution for determining the limits of reliable data at the edges of the scan.
- Shaded relief image from the 10 cm DEM for visualization and context.
- Trajectory polyline (from the trajectory point cloud) showing the path of the scanner.
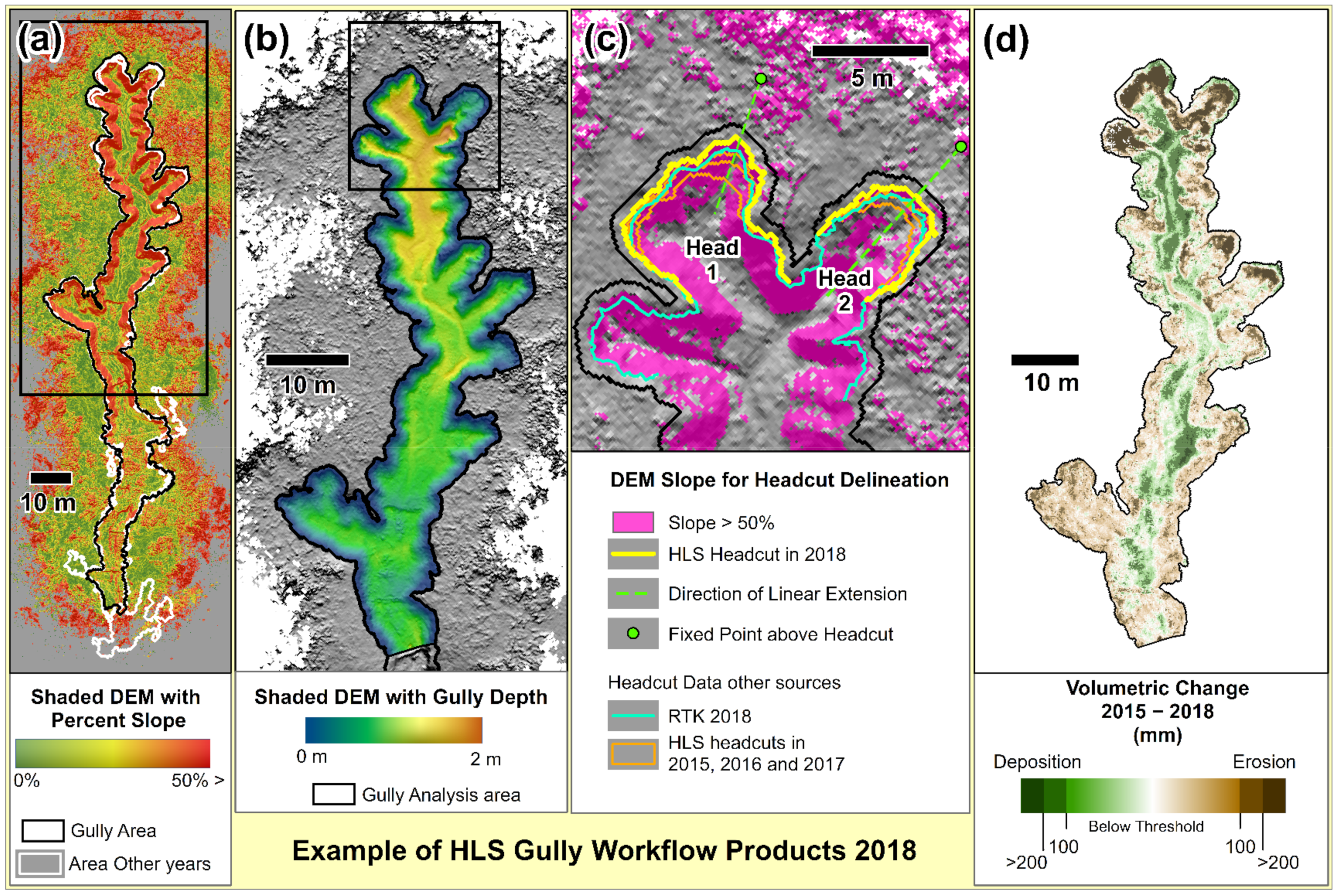
2.2.3. Gully Morphology—Area, Depth and Volume and Headcut
2.2.4. Measuring Change between Years
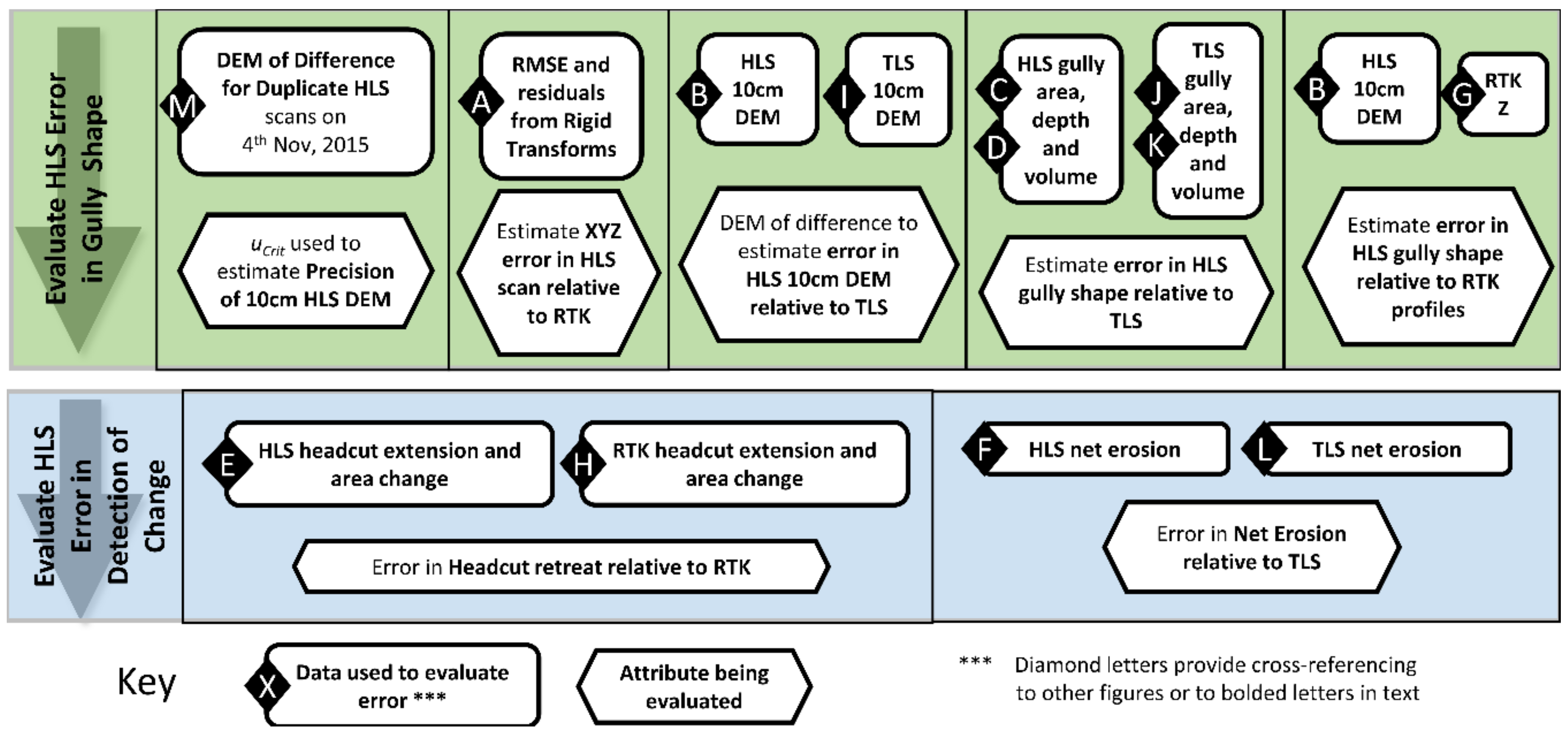
2.3. Evaluation of Error
2.3.1. Validation Data
2.3.2. Validation Data Workflow
2.3.3. Error Analysis
3. Results
3.1. Outputs from HLS Workflow
3.2. HLS Repeatability and Error in Gully Morphology
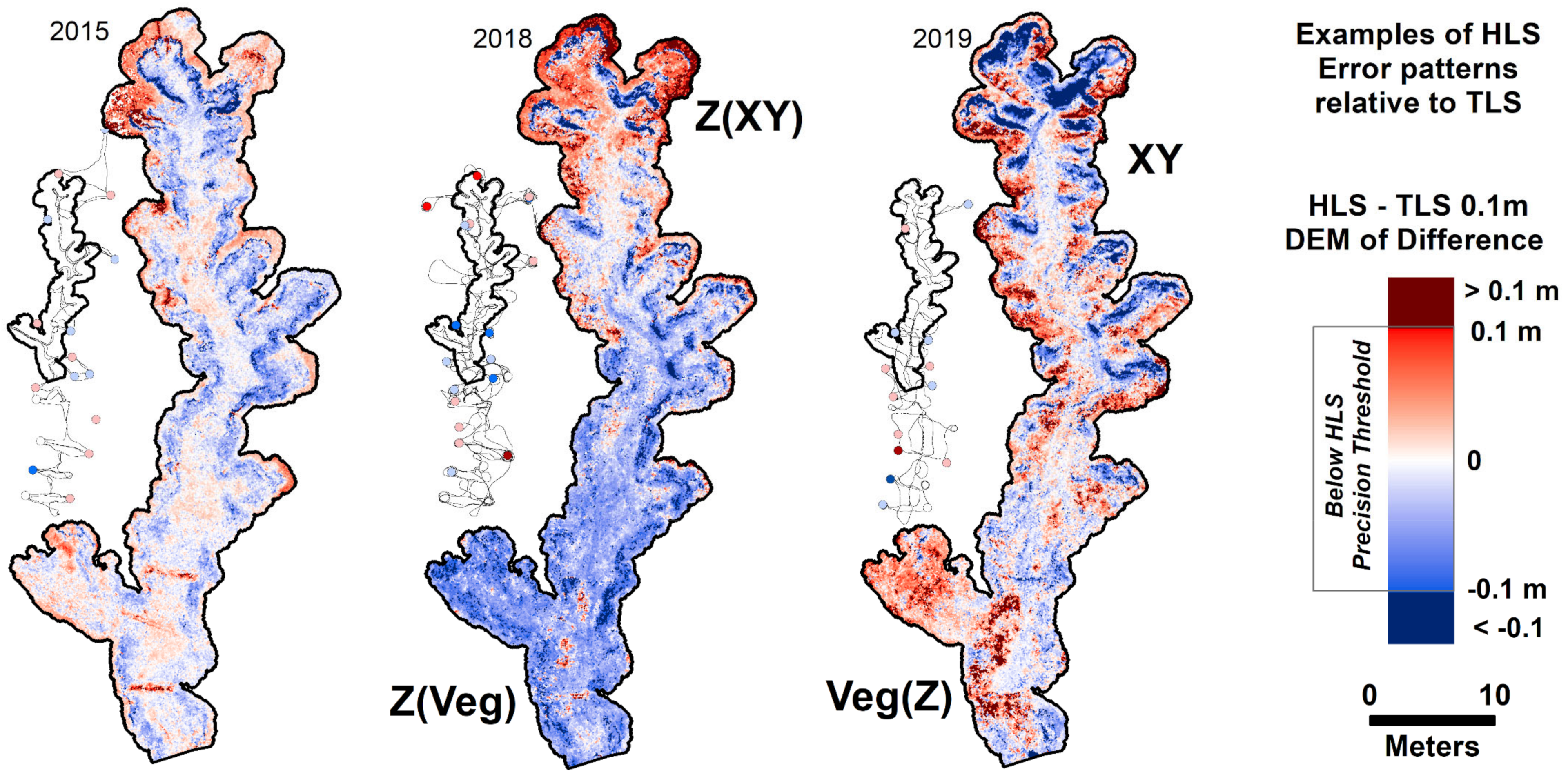
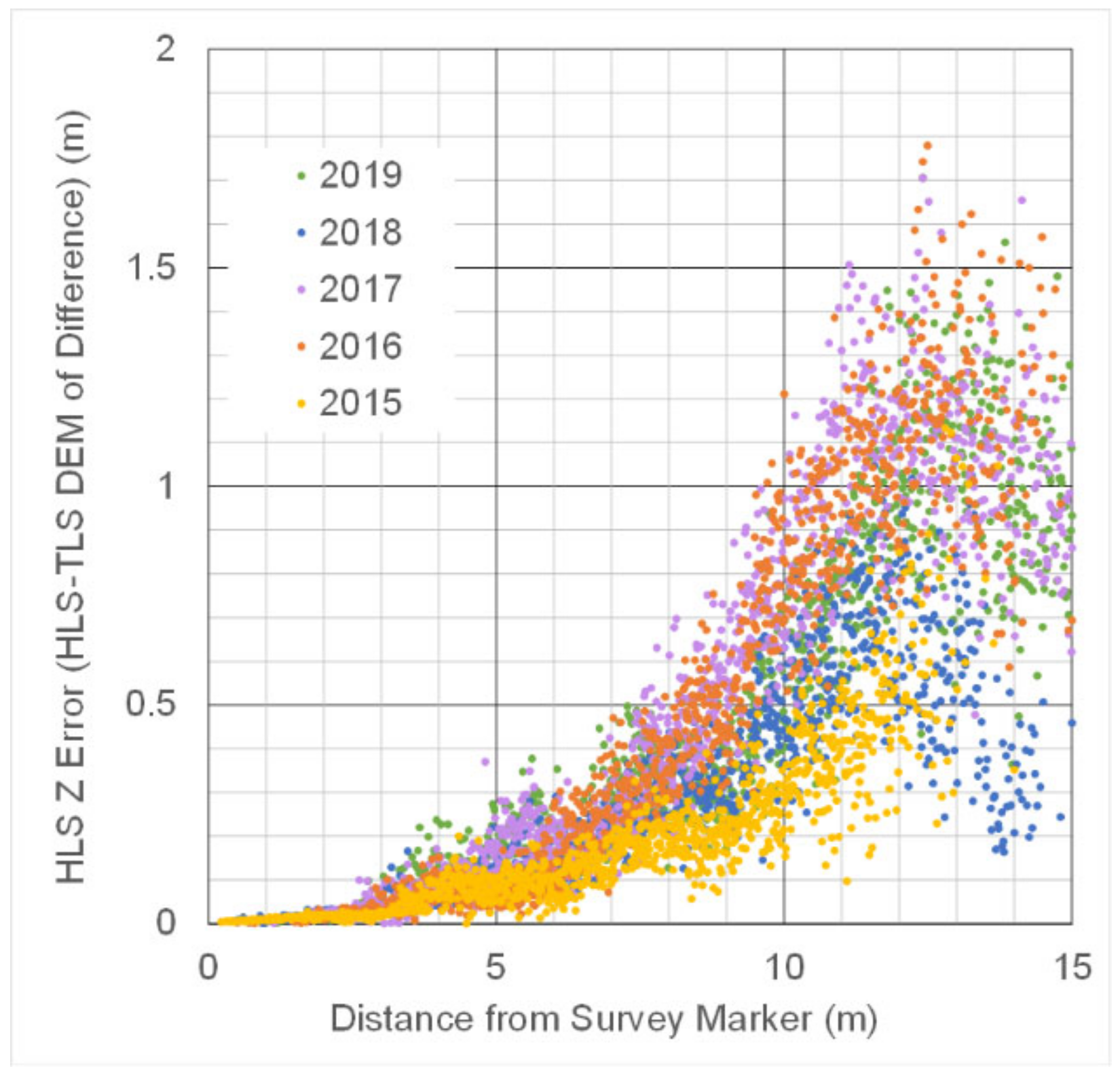
3.2.1. Precision and Broadscale Distortion
3.2.2. Error in Gully Morphology
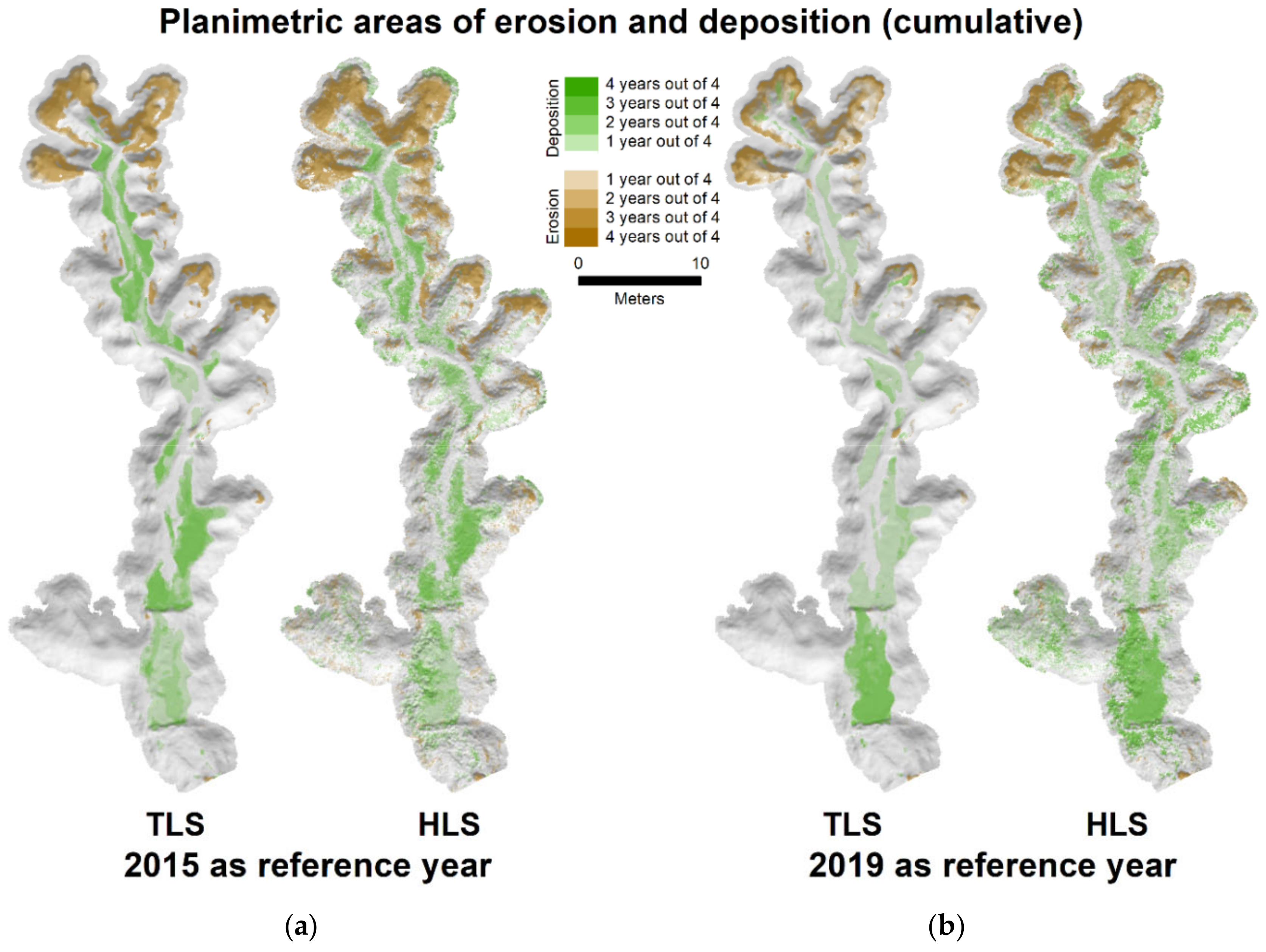
- XY–XY offset of HLS relative to TLS evident in steep areas as paired red-blue “shadows”. paired positive and negative (red-blue) “shadow” artefacts in steep walled areas on opposite sides of the gully.
- Z–Z offset of HLS relative to TLS evident as uniform coloration in the DoD.
- Veg—Vegetation artefacts evident as highly textured “blobs” of red, where HLS has been unable to penetrate dense vegetation and/or is affected by localized low point density.
3.3. HLS Error Detecting Change in Gullies
3.3.1. Headcut Extension Compared to RTK
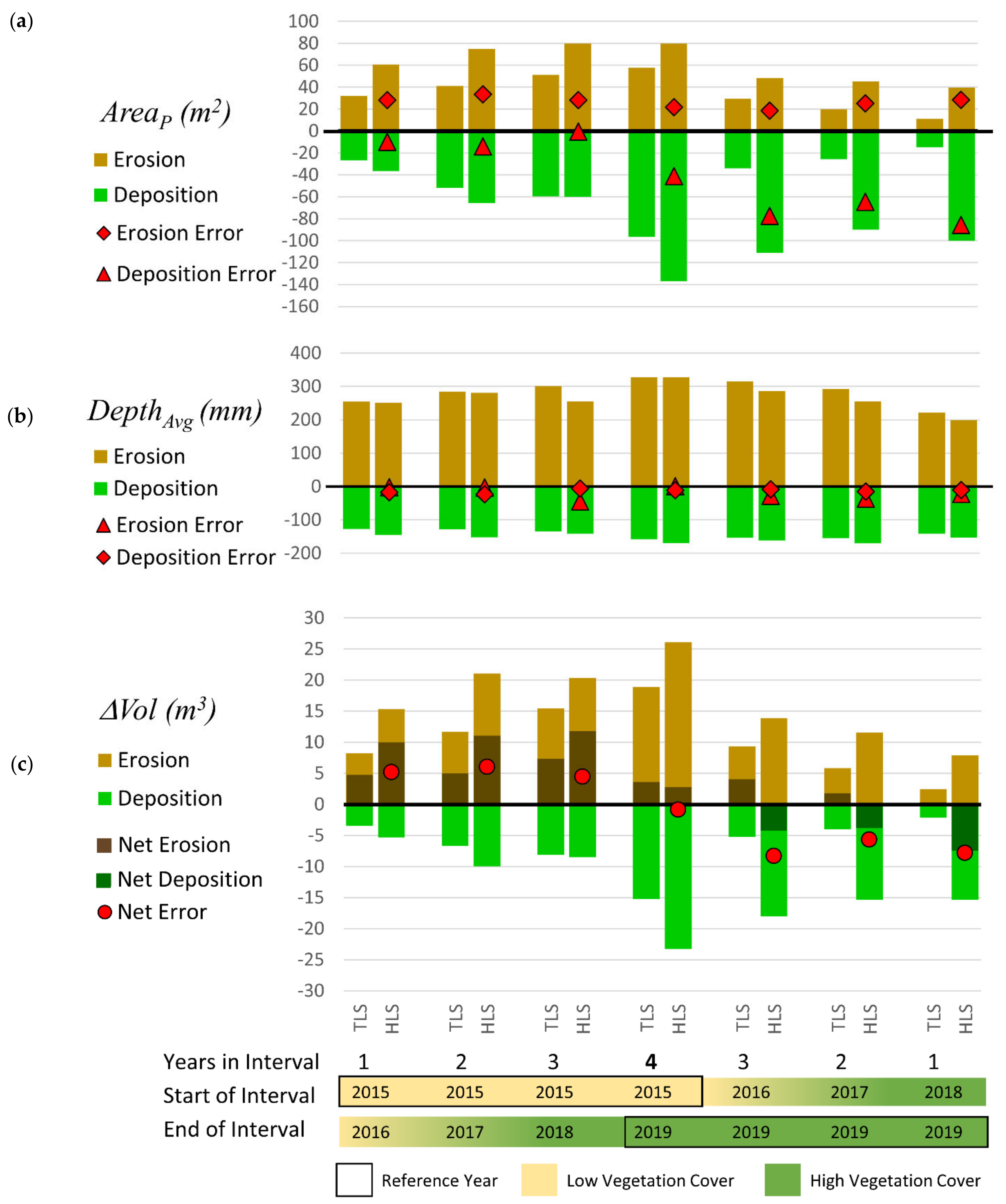
3.3.2. Volumetric Change (Net Erosion Compared to TLS)
4. Discussion and Recommendations
4.1. HLS Errors and Implications for Change Detection amd Monitoring Frequency
4.2. Comparison of HLS with Other Gully Monitoring Approaches
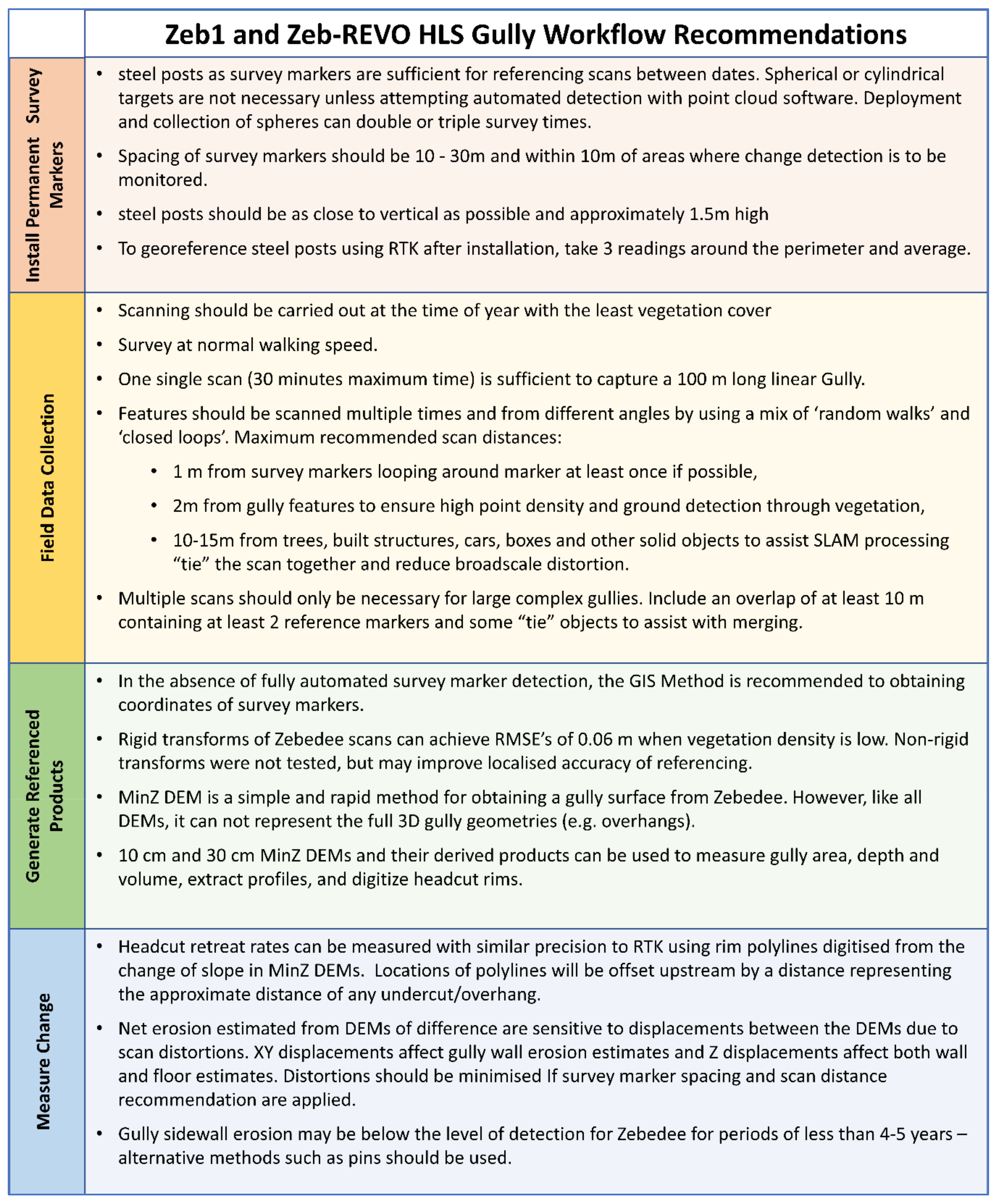
4.3. Recommendations for Application of HLS Gully Workflow
4.4. Areas of Future Improvement and Research
- Re-evaluate HLS errors using the new GeoSLAM reference plate technology: In mid-2020 a reference plate was introduced by GeoSLAM which makes it possible to “tag” the location of survey markers during scanning and apply rigid or non-rigid transforms automatically during GeoSLAM processing. This has potential to replace the GIS Method and Referencing steps in the HLS workflow (Figure 2). The reference plate method cannot be applied retrospectively to historical scans and improvements in the accuracy of new scans would need to be re-assessed.
- Re-evaluate HLS errors based on non-rigid transforms or localized corrections: Subtle broadscale distortions in HLS scans were the major contributor to error in estimating volumes of erosion and deposition. Distortions may, in theory, be reduced by using non-rigid transforms or localized corrections. Non-rigid point cloud transforms are possible in GeoSLAM’s latest Hub software for scans where the reference plate has been used. Alternatively, methods such Particle Image Velocimetry [36] and Fourier analysis could potentially also be used to detect localised distortions in XY and Z (respectively) between two DEMs without the need for extra survey markers, although care should be taken to avoid “correcting” real gully morphological changes.
- Evaluate in more detail the ability of HLS to detect gully wall erosion. Erosion pin measurements at this study site suggest 4-year erosion rates were below the limits of detection by HLS. However, such gully wall erosion can be significant across large areas of gully wall [13]. Improvements in the detection of gully wall erosion may also improve the estimation of volumetric change.
5. Conclusions and Recommendations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. GeoSLAM Settings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GeoSLAM Processing Option | Default | Used |
|---|---|---|
| Local Convergence Threshold (0) | 0 | 0 |
| Local Windows Size (0) | 4 | 4 |
| Local Voxel Density (1) | 1 | 2 |
| Local Rigidity (0) | 0 | 0 |
| Modify Bounding Box (False) | False | False |
| Process in Reverse (False) | False | False |
| Conservative Outlier Pruning (False) | False | True |
| Large Range Filter Slope (False) | False | True |
| End Processing Early (False) | False | False |
| Place Recognition (False) | False | True |
| Prioritise Planar Surface (False) | False | False |
| Start/Finish–Closed loop (True) | True | False |
Appendix B. Transformation from Raw HLS Scan Coordinates to GDA94 MGA55
| Transformation Matrix | 2015 | ||||||
|---|---|---|---|---|---|---|---|
| R11 | R12 | R13 | Tx | 9.99 E − 0.1 | 3.76 E − 0.2 | −1.00 E − 0.3 | 448,992.03 |
| R21 | R22 | R23 | Ty | −3.76 E − 0.2 | 9.99 E − 0.1 | 2.68 E − 0.5 | 7,800,429.24 |
| R31 | R32 | R33 | Tz | 1.00 E − 0.3 | 1.09 E − 0.5 | 1.00 E + 0.0 | 326.36 |
| 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 |
| 2016 | 2017 | ||||||
| 1.00 E + 0.0 | −1.12 E − 0.2 | 2.80 E − 0.3 | 448,993.50 | −9.93 E − 0.1 | 1.17 E − 0.1 | 1.16 E − 0.4 | 448,993.90 |
| 1.12 E − 0.2 | 1.00 E − 0.0 | 2.80 E − 0.3 | 7,800,422.75 | −1.17 E − 0.1 | −9.93 E − 0.1 | 1.25 E − 0.3 | 7,800,430.97 |
| −2.83 E − 0.3 | −2.77 E − 0.3 | 1.00 E + 0.0 | 326.06 | 2.62 E − 0.4 | 1.23 E − 0.3 | 1.00 E + 0.0 | 326.35 |
| 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 |
| 2018 | 2019 | ||||||
| 9.52 E − 0.1 | 3.05 E − 0.1 | −3.05 E − 0.3 | 449,024.15 | −9.82 E − 0.1 | −1.89 E − 0.1 | 1.87 E − 0.3 | 449,010.55 |
| −3.05 E − 0.1 | 9.52 E − 0.1 | −1.45 E − 0.3 | 7,800,428.76 | 1.89 E − 0.1 | −9.82 E − 0.1 | 1.91 E − 0.3 | 7,800,439.44 |
| 2.46 E − 0.3 | 2.32 E − 0.3 | 1.00 E + 0.0 | 327.32 | 1.48 E − 0.3 | 2.23 E − 0.3 | 1.00 E − 0.0 | 327.52 |
| 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 |
Appendix C. Tables of HLS Volumetric Change and Errors
| AreaP (m2) | Error (m2) | Error (%) | |||||
|---|---|---|---|---|---|---|---|
| Interval | No Years | Eros | Dep | Eros | Dep | Eros | Dep |
| 2015–2016 | 1 | 60.7 | 36.5 | 28.5 | 9.6 | 89% | 36% |
| 2015–2017 | 2 | 74.9 | 65.6 | 33.9 | 13.7 | 83% | 26% |
| 2015–2018 | 3 | 79.6 | 59.9 | 28.4 | 0.2 | 56% | 0% |
| 2015–2019 | 4 | 79.7 | 137.1 | 22.1 | 40.7 | 38% | 42% |
| 2016–2019 | 3 | 48.3 | 111.0 | 18.8 | 77.1 | 64% | 227% |
| 2017–2019 | 2 | 45.3 | 90.0 | 25.4 | 64.3 | 128% | 251% |
| 2018–2019 | 1 | 39.8 | 100.1 | 28.7 | 85.3 | 259% | 575% |
| Interval | No Years | DepthAvg (mm) | Error (mm) | Error (%) | |||
|---|---|---|---|---|---|---|---|
| Eros | Dep | Eros | Dep | Eros | Dep | ||
| 2015–2016 | 1 | 252 | 145 | −3 | 18 | −1% | 14% |
| 2015–2017 | 2 | 281 | 152 | −4 | 24 | −1% | 18% |
| 2015–2018 | 3 | 255 | 142 | −46 | 7 | −15% | 5% |
| 2015–2019 | 4 | 327 | 170 | 0 | 12 | 0% | 8% |
| 2016–2019 | 3 | 287 | 162 | −29 | 9 | −9% | 6% |
| 2017–2019 | 2 | 255 | 170 | −37 | 16 | −13% | 10% |
| 2018–2019 | 1 | 198 | 153 | −23 | 11 | −10% | 8% |
| Interval | No Years | ΔVol (m3) | Error (m3) | Error (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Eros | Dep | Net | Eros | Dep | Net | Eros | Dep | Net | ||
| 2015–2016 | 1 | 15.3 | 5.3 | 10.0 | 7.1 | 1.9 | 5.2 | 87% | 55% | 109% |
| 2015–2017 | 2 | 21.1 | 10.0 | 11.1 | 9.4 | 3.3 | 6.1 | 80% | 50% | 120% |
| 2015–2018 | 3 | 20.3 | 8.5 | 11.8 | 4.9 | 0.4 | 4.5 | 32% | 5% | 61% |
| 2015–2019 | 4 | 26.1 | 23.3 | 2.8 | 7.2 | 8.1 | −0.8 | 38% | 53% | −23% |
| 2016–2019 | 3 | 13.8 | 18.0 | −4.2 | 4.6 | 12.8 | −8.2 | 49% | 246% | −203% |
| 2017–2019 | 2 | 11.5 | 15.3 | −3.8 | 5.7 | 11.4 | −5.6 | 99% | 286% | −307% |
| 2018–2019 | 1 | 7.9 | 15.3 | −7.4 | 5.4 | 13.2 | −7.8 | 222% | 628% | −2235% |
References
- The State of Queensland. Reef Water Quality Protection Plan 2013; Reef Water Quality Protection Plan Secretariat: Brisbane, Australia, 2013. [Google Scholar]
- The State of Queensland. Reef 2050 Water Quality Improvement Plan 2017–2022; Reef Water Quality Protection Plan Secretariat: Brisbane, Australia, 2017. [Google Scholar]
- Wilkinson, S.N.; Hancock, G.J.; Bartley, R.; Hawdon, A.A.; Keen, R.J. Using sediment tracing to assess processes and spatial patterns of erosion in grazed rangelands, Burdekin River basin, Australia. Agric. Ecosyst. Environ. 2013, 180, 90–102. [Google Scholar] [CrossRef]
- Wilkinson, S.N.; Olley, J.M.; Furuichi, T.; Burton, J.; Kinsey-Henderson, A.E. Sediment source tracing with stratified sampling and weightings based on spatial gradients in soil erosion. J. Soils Sediments 2015, 15, 2038–2051. [Google Scholar] [CrossRef]
- Wilkinson, S.N.; Hairsine, P.B.; Brooks, A.; Bartley, R.; Hawdon, A.; Pietsch, T.; Shepherd, B.; Austin, J. Gully and Stream Bank Toolbox (2nd Edition): A Technical Guide for the Reef Trust Phase IV Gully and Stream Bank Erosion Control Program; Commonwealth of Australia: Canberra, Australia, 2019; 94p. [Google Scholar]
- Giménez, R.; Marzolff, I.; Campo, M.A.; Seeger, M.; Ries, J.B.; Casalí, J.; Álvarez-Mozos, J. Accuracy of high-resolution photogrammetric measurements of gullies with contrasting morphology. Earth Surf. Process. Landf. 2009, 34, 1915–1926. [Google Scholar] [CrossRef]
- Castillo, C.; Pérez, R.; James, M.R.; Quinton, J.N.; Taguas, E.V.; Gómez, J.A. Comparing the Accuracy of Several Field Methods for Measuring Gully Erosion. Soil Sci. Soc. Am. J. 2012, 76, 1319–1332. [Google Scholar] [CrossRef] [Green Version]
- Goodwin, N.R.; Armston, J.D.; Muir, J.; Stiller, I. Monitoring gully change: A comparison of airborne and terrestrial laser scanning using a case study from Aratula, Queensland. Geomorphology 2017, 282, 195–208. [Google Scholar] [CrossRef]
- Koci, J.; Jarihani, B.; Leon, J.X.; Sidle, R.C.; Wilkinson, S.N.; Bartley, R. Assessment of UAV and Ground-Based Structure from Motion with Multi-View Stereo Photogrammetry in a Gullied Savanna Catchment. ISPRS Int. J. Geo-Inf. 2017, 6, 328. [Google Scholar] [CrossRef] [Green Version]
- Abegg, M.; Kukenbrink, D.; Zell, J.; Schaepman, M.E.; Morsdorf, F. Terrestrial Laser Scanning for Forest Inventories Tree Diameter Distribution and Scanner Location Impact on Occlusion. Forests 2017, 8, 184. [Google Scholar] [CrossRef] [Green Version]
- Puente, I.; Gonzalez-Jorge, H.; Martinez-Sanchez, J.; Arias, P. Review of mobile mapping and surveying technologies. Measurement 2013, 46, 2127–2145. [Google Scholar] [CrossRef]
- Glennie, C.; Brooks, B.; Ericksen, T.; Hauser, D.; Hudnut, K.; Foster, J.; Avery, J. Compact Multipurpose Mobile Laser Scanning System - Initial Tests and Results. Remote Sens. 2013, 5, 521–538. [Google Scholar] [CrossRef] [Green Version]
- Wilkinson, S.N.; Kinsey-Henderson, A.E.; Hawdon, A.A.; Hairsine, P.B.; Bartley, R.; Baker, B. Grazing impacts on gully dynamics indicate approaches for gully erosion control in northeast Australia. Earth Surf. Process. Landf. 2018, 43, 1711–1725. [Google Scholar] [CrossRef]
- Kroon, F.; Kuhnert, P.; Henderson, B.; Wilkinson, S.; Henderson, A.; Abbott, B.; Brodie, J.; Turner, R. River loads of suspended solids, nitrogen, phosphorus and herbicides delivered to the Great Barrier Reef lagoon. Mar. Pollut. Bull. 2012, 65, 167–181. [Google Scholar] [CrossRef]
- Bartley, R.; Corfield, J.P.; Hawdon, A.A.; Kinsey-Henderson, A.E.; Abbott, B.N.; Wilkinson, S.N.; Keen, R.J. Can changes to pasture management reduce runoff and sediment loss to the Great Barrier Reef? The results of a 10-year study in the Burdekin catchment, Australia. Rangel. J. 2014, 36, 67–84. [Google Scholar] [CrossRef] [Green Version]
- Bosse, M.; Zlot, R.; Flick, P. Zebedee: Design of a Spring-Mounted 3-D Range Sensor with Application to Mobile Mapping. IEEE Trans. Robot. 2012, 28, 1104–1119. [Google Scholar] [CrossRef]
- Sirmacek, B.; Shen, Y.; Lindenbergh, R.; Zlatanova, S.; Diakite, A.; Baatz, R. Comparison of ZEB1 and Leica C10 Indoor Laser Scanning Point Clouds. In Proceedings of the XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016. [Google Scholar]
- Thomas, J.B.; Dewez, E.P.; Degas, M.; Richard, T.; Pannet, P. Handheld Mobile Laser Scanners Zeb-1 and Zeb-Revo to map an underground quarry and its above-ground surroundings. In Proceedings of the 2nd Virtual Geosciences Conference, VGC 2016, Bergen, Norway, 22–23 September 2016. [Google Scholar]
- Marselis, S.M.; Yebra, M.; Jovanovic, T.; van Dijk, A. Deriving comprehensive forest structure information from mobile laser scanning observations using automated point cloud classification. Environ. Model. Softw. 2016, 82, 142–151. [Google Scholar] [CrossRef]
- Zlot, R.; Bosse, M.; Greenop, K.; Jarzab, Z.; Juckes, E.; Roberts, J. Efficiently capturing large, complex cultural heritage sites with a handheld mobile 3D laser mapping system. J. Cult. Herit. 2014, 15, 670–678. [Google Scholar] [CrossRef]
- James, M.R.; Quinton, J.N. Ultra-rapid topographic surveying for complex environments: The hand-held mobile laser scanner (HMLS). Earth Surf. Process. Landf. 2014, 39, 138–142. [Google Scholar] [CrossRef] [Green Version]
- Ryding, J.; Williams, E.; Smith, M.J.; Eichhorn, M.P. Assessing Handheld Mobile Laser Scanners for Forest Surveys. Remote Sens. 2015, 7, 1095–1111. [Google Scholar] [CrossRef] [Green Version]
- GeoSLAM. ZEB-REVO Users Manual V 3.0.0.; GeoSLAM: Nottingham, UK, 2017. [Google Scholar]
- Hokuyo. Scanning Laser Range Sensor UTM-30LX-F SPECIFICATIONS. Available online: https://hokuyo-usa.com/application/files/7015/9111/2563/UTM-30LX-F_Specifications.pdf (accessed on 1 August 2021).
- Microstrain. 3DM-GX2 Technical Product Overview. Available online: http://files.microstrain.com/3dm-gx2_datasheet_v1.pdf (accessed on 1 August 2021).
- ASPRS. LAS Specification Version 1.2, American Society for Photogrammetry and Remote Sensing (ASPRS). Available online: https://www.asprs.org/wp-content/uploads/2010/12/asprs_las_format_v12.pdf (accessed on 30 April 2021).
- Wells, R.R.; Momm, H.G.; Castillo, C. Quantifying uncertainty in high-resolution remotely sensed topographic surveys for ephemeral gully channel monitoring. Earth Surf. Dynam. 2017, 5, 347–367. [Google Scholar] [CrossRef] [Green Version]
- Goodwin, N.R.; Armston, J.; Stiller, I.; Muir, J. Assessing the repeatability of terrestrial laser scanning for monitoring gully topography: A case study from Aratula, Queensland, Australia. Geomorphology 2016, 262, 24–36. [Google Scholar] [CrossRef]
- Burrough, P.A.; McDonell, R.A. Principles of Geographical Information Systems; Oxford University Press: New York, NY, USA, 1998; p. 190. [Google Scholar]
- Evans, M.; Lindsay, J. High resolution quantification of gully erosion in upland peatlands at the landscape scale. Earth Surf. Process. Landf. 2010, 35, 876–886. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Bartley, R.; Goodwin, N.; Henderson, A.E.; Hawdon, A.; Tindall, D.; Wilkinson, S.N.; Baker, B. A Comparison of Tools for Monitoring and Evaluating Channel Change; Report to the National Environmental Science Programme; Reef and Rainforest Research Centre Limited; Cairns, Australia, 2016; p. 29. [Google Scholar]
- Tindall, D.; Marchand, B.; Gilad, U.; Goodwin, N.; Denham, R.; Byer, S. Gully Mapping and Drivers in the Grazing Lands of the Burdekin Catchment; RP66G Synthesis Report; Queensland Department of Science, Information Technology, Innovation and the Arts: Brisbane, Australia, 2014. [Google Scholar]
- Croke, J.; Todd, P.; Thompson, C.; Watson, F.; Denham, R.; Khanal, G. The use of multi temporal LiDAR to assess basin-scale erosion and deposition following the catastrophic January 2011 Lockyer flood, SE Queensland, Australia. Geomorphology 2013, 184, 111–126. [Google Scholar] [CrossRef]
- Grove, J.R.; Croke, J.; Thompson, C. Quantifying different riverbank erosion processes during an extreme flood event. Earth Surf. Process. Landf. 2013, 38, 1393–1406. [Google Scholar] [CrossRef]
- Okyay, U.; Telling, J.; Glennie, C.L.; Dietrich, W.E. Airborne lidar change detection: An overview of Earth sciences applications. Earth-Sci. Rev. 2019, 198, 25. [Google Scholar] [CrossRef]










| Type | Instrument | Year of Capture | ||||
|---|---|---|---|---|---|---|
| 2015 | 2016 | 2017 | 2018 | 2019 | ||
| HLS | Zeb1 | 4 November * 6 November ** | 11 August | - | - | - |
| HLS | Zeb REVO | - | - | 11 April | 4 April | 30 April |
| TLS | RIEGL VZ400 | 6 November | 11 August | 12 May | 4 May | 15 May |
| RTK | Ashtech, ProMark 200 | 12 April | 28 April | 11 April | 26 April | 17 October *** |
| Year | HLS Scanner | Number of Scans Merged | Initial Marker Count | Final Marker Count | Final RMSE | Final RMSE X | Final RMSE Y | Final RMSE Z |
|---|---|---|---|---|---|---|---|---|
| 2019 | Zeb REVO | 1 | 17 | 14 | 0.095 | 0.054 | 0.063 | 0.047 |
| 2018 | Zeb REVO | 2 | 23 | 21 | 0.097 | 0.065 | 0.064 | 0.033 |
| 2017 | Zeb1 | 2 | 25 | 23 | 0.076 | 0.041 | 0.045 | 0.045 |
| 2016 | Zeb1 | 3 | 16 | 16 | 0.063 | 0.033 | 0.032 | 0.043 |
| 2015 | Zeb1 | 2 | 20 | 19 | 0.058 | 0.032 | 0.037 | 0.031 |
| Measure | TLS | HLS | ME (% Error) HLS All Years |
|---|---|---|---|
| Gully Area (m2) | 546–577 | 555–594 | +25 (+5%) |
| Gully Volume (m3) | 332–353 | 340–375 | +21 (+6%) |
| Maximum Gully Depth (m) | 1.71 | 1.80 | +0.09 (+5%) |
| Interval | No Years | AreaP (m2) | DepthAvg (mm) | ΔVol (m3) | ||||
|---|---|---|---|---|---|---|---|---|
| (Eros) | (Dep) | (Eros) | (Dep) | (Eros) | (Dep) | (Net) | ||
| 2015–2016 | 1 | 32 | 27 | 254 | 127 | 8.2 | 3.4 | 4.8 |
| 2015–2017 | 2 | 41 | 52 | 285 | 128 | 11.7 | 6.6 | 5.0 |
| 2015–2018 | 3 | 51 | 60 | 301 | 135 | 15.4 | 8.1 | 7.4 |
| 2015–2019 | 4 | 58 | 96 | 328 | 158 | 18.9 | 15.2 | 3.7 |
| 2016–2019 | 3 | 29 | 34 | 315 | 153 | 9.3 | 5.2 | 4.1 |
| 2017–2019 | 2 | 20 | 26 | 292 | 155 | 5.8 | 4.0 | 1.8 |
| 2018–2019 | 1 | 11 | 15 | 221 | 142 | 2.5 | 2.1 | 0.3 |
| Measure | Validation Data | Number of Validation Points | Error | Relative Error and Range | Assessment and Recommendation |
|---|---|---|---|---|---|
| Precision of 10 cm DEM heights | HLS DoD Duplicate surveys (2015) | 60,000 grid cells | Ucrit = 0.0911 m~0.1 m | N/A | HLS can be used to create accurate DEMs of gullies to 0.1 m resolution, as X, Y, and Z errors in HLS DEMs are all generally less than one pixel (0.1 m). |
| Broadscale distortion in Scans and 10 cm DEM (Table 2) | RTK Transform Residuals (2015) | 14 ref markers | RMSE = 0.095 m | N/A | |
| RTK Transform Residuals (2016) | 21 ref markers | RMSE = 0.097 m | N/A | ||
| RTK Transform Residuals (2017) | 23 ref markers | RMSE = 0.076 m | N/A | ||
| RTK Transform Residuals (2018) | 16 ref markers | RMSE = 0.063 m | N/A | ||
| RTK Transform Residuals (2019) | 19 ref markers | RMSE = 0.058 m | N/A | ||
| Spatial Patterns of error in 10 cm DEM heights (Figure 6) | TLS Vs HLS DoD (2015 to 2019) | 60,000 grid cells | N/A * | N/A | |
| Error in Gully morphology derived from 10 cm DEM (Table 3) | RTK cross section profiles | 573 points | RMSE = 0.092 m | N/A | HLS DEMs can be used to characterize gully shape and metrics to a similar level of accuracy to TLS |
| Gully Area from TLS | 5 years | ME = +25 m2 | +5% (range +2% to +10%) | ||
| Gully Depth from TLS | 5 years | ME = +0.09 m | +5% (range 0% to +16%) | ||
| Gully Volume from TLS | 5 years | ME = 21 m3 | +6% (range 2% to 12%) | ||
| Error in Detection of Headcut Extension from 10 cm DEMs | Annual Linear Extension Headcut from RTK | 2 headcuts × 3 | ME = +0.003 m RMSE = 0.035 m | −1% (with r2 = 0.7) (range −36% to +45%) | HLS DEMs are able to detect headcut extension to a similar level of accuracy to RTK, although location is offset due to rim overhang. |
| Annual Change in Headcut Area from RTK | 2 headcuts × 3 | ME = +0.249 m RMSE = 0.434 m | +18% (with r2 = 0.86) range (−22% to +66%) | ||
| Error in detection of Net Erosion from 10 cm DEMs of Difference (Figure 8, Figure 9, Table A4, Table A3) | Average depth of erosion from TLS (1–4 years) | 7 intervals | ME = +0.020 m | −7% (range −15% to 0%) | HLS DEMs can reproduce qualitative patterns of erosion and deposition to TLS, but subtle X, Y, Z errors contribute adversely to the use of HLS for quantitative volumetric change detection. |
| Average depth of deposition from TLS (1–4 years) | 7 intervals | ME = +0.014 m | +10% (range 5% to 18%) | ||
| Planimetric area of erosion from TLS (2015–2019) | 1 interval | Error = +22 m2 | +38% | ||
| Planimetric area of erosion from TLS (1–3 years) | 3 intervals 3 intervals | 2019 ME = +24 m2 2015 ME = +30 m2 | +150% (range 64% to 259%) +76% (range 56% to 89%) | ||
| Planimetric area of deposition from TLS (2015–2019) | 1 interval | Error = +41 m2 | +42% | ||
| Planimetric area of deposition from TLS (1–3 years) | 3 intervals 3 intervals | 2019 ME = +67 m2 2015 ME = +8 m2 | +351% (range 227% to 575%) +21% (range 0% to 36%) | ||
| Net erosion from TLS (2015–2019) | 1 interval | Error = −0.8 m3 | −23% | ||
| Net erosion from TLS (1–3 years) | 3 intervals | 2019 ME = −7.2 m3 | −915% (range −203% to −2235%) | ||
| 3 intervals | 2015 ME = +5.3 m3 | +97% (range +61% to +120%) |
| Method (Reference) | Monitoring Scale (Precision) | Coverage | Survey Time and Method | Costs and Processing Requirements | Morphology | ΔHeadcut | Δwalls/floors | ΔVolume |
|---|---|---|---|---|---|---|---|---|
| Erosion Pins ([13]) | Gully (mm) | Selected features only (e.g., cross sections of gully wall). Coarse resolution (0.5 m spacing) | 1–2 h per gully by skilled field technician. Pins permanently installed and then repeat measured with calipers. | ~$100 for pins and calipers. 1–2 h per gully for data analysis. | ~ | × | √ | ο |
| Structure from motion (SfM) [9] | Gully to paddock (if drone) (cm) | Mostly complete coverage—point clouds and gridded products | 2 h per gully or 3–4 h per paddock by skilled field technician and/or drone pilot, target deployment required. | ~$3000 for camera or drone plus ~$3500 for software (PC), 31–120 h processing per survey with moderate to high processor skill level required | ο | ~ | ~ | ~ |
| RTK (Ashtech Promark 200 specifications (this Study, [13]) | Gully (cm) | Selected features only coverage (e.g., headcut, cross sections of gully wall) | 1½ h per gully by skilled field technician, base station deployment required | ~USD 20,000 for base station, rover, tripod, poles and antennae. Minimal processing time and processor skill level required if base station is set up correctly. | ο | ο | × | ο |
| HLS (Zeb1, Zeb REVO) (This study) | Gully to hillslope (cm) | Complete—point clouds and gridded products | <1 h per 100 linear metres by minimally skilled field technician, no target deployment required | USD 25,000 for scanner and software, 2–3 h processing per survey with moderate processor skill level required | √ | √ | × | ο |
| TLS (e.g., Reigl) (This study, [28,32]) | Gully to hillslope (cm) | Complete—point clouds and gridded products | >4 h per 100 linear metres by skilled field technician. Target deployment required | ~USD 80,000–200,000 for scanner and software, 7 h processing per survey processing time with specialised software, high processor skill level required | √ | √ | × | √ |
| Airborne Lidar [8,32,33,34,35] | Paddock to Catchment (cm–m) | Complete—point clouds and gridded products | Data capture only available via commercial suppliers. May take weeks to months depending on logistics, weather. | Costs ~USD 1000–2000 per km2, unless part of regular government monitoring programme, processing is carried out by supplier and may take months after survey capture. | ~ | ~ | ~ | ~ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kinsey-Henderson, A.; Hawdon, A.; Bartley, R.; Wilkinson, S.N.; Lowe, T. Applying a Hand-Held Laser Scanner to Monitoring Gully Erosion: Workflow and Evaluation. Remote Sens. 2021, 13, 4004. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13194004
Kinsey-Henderson A, Hawdon A, Bartley R, Wilkinson SN, Lowe T. Applying a Hand-Held Laser Scanner to Monitoring Gully Erosion: Workflow and Evaluation. Remote Sensing. 2021; 13(19):4004. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13194004
Chicago/Turabian StyleKinsey-Henderson, Anne, Aaron Hawdon, Rebecca Bartley, Scott N. Wilkinson, and Thomas Lowe. 2021. "Applying a Hand-Held Laser Scanner to Monitoring Gully Erosion: Workflow and Evaluation" Remote Sensing 13, no. 19: 4004. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13194004