
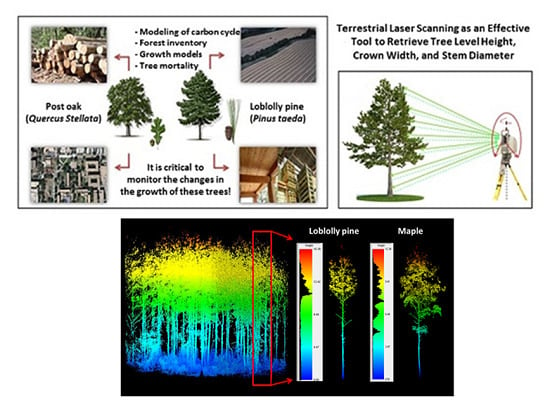
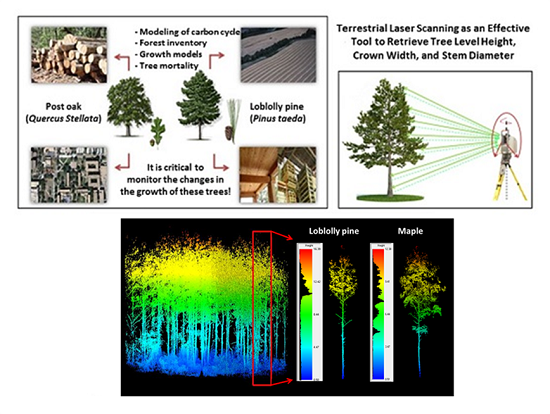
Terrestrial Laser Scanning as an Effective Tool to Retrieve Tree Level Height, Crown Width, and Stem Diameter



Abstract
:
1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | DBH Retrieval Method | Nt a | Ns b | Results |
|---|---|---|---|---|
| [22] | Circle fitting at 1.2 m, 1.3 m and 1.4 m AGL c | NA d | Single scan and multiple scans (5 positions) | NA |
| [19] | Circle fitting at 1.3 m AGL | 79 | Single scan and multiple scans (3 positions) | SD e ranged from 1.21 to 2.47 cm |
| [23] | (a) Single circle fitting at 1.3 m AGL (10 cm thickness) | 154 | Single scan | RMSE f = 4.2 cm |
| (b) Multiple circle fitting at 1 m, 1.5 m, 2 m AGL (10 cm thickness) | 154 | Single scan | RMSE = 3.4 cm | |
| (c) Cylinder fitting between 0.95 and 2.05 m AGL | 134 | Single scan | RMSE = 7.0 cm | |
| [18] | Cylinder fitting between 1.25 and 1.75 m AGL (50 cm thickness) | 128 | Multiple scans (5 positions) | R2 = 0.85 |
| [10] | Circle fitting at 1.3 m AGL (10 cm thickness) | 26 | Multiple scans (4 positions) | R2 = 0.79 |
| [24] | Circular Hough transformation for points between 1.27 and 1.33 m AGL, circle and cylinder fitting (4 cm thickness) | 8 | Multiple scans (4 positions) | RMSE ranged from 1.9 to 3.7 cm |
| [25] | Hough transformation and circle fitting at 1.3 m AGL | 11 | Single scan and multiple scans (4 positions) | NA |
| [21] | Circle fitting at 1.3 m AGL | 12 | Single scan at site 1 and multiple scans (2 positions) at site 2 | R2 = 0.92, site 2 |
| [26] | Cylinder fitting between 1.28 and 1.32 m AGL (4 cm thickness) and pixel method | 199 | Multiple scans (4 positions) | R2 > 0.946 |
2. Materials and Methods

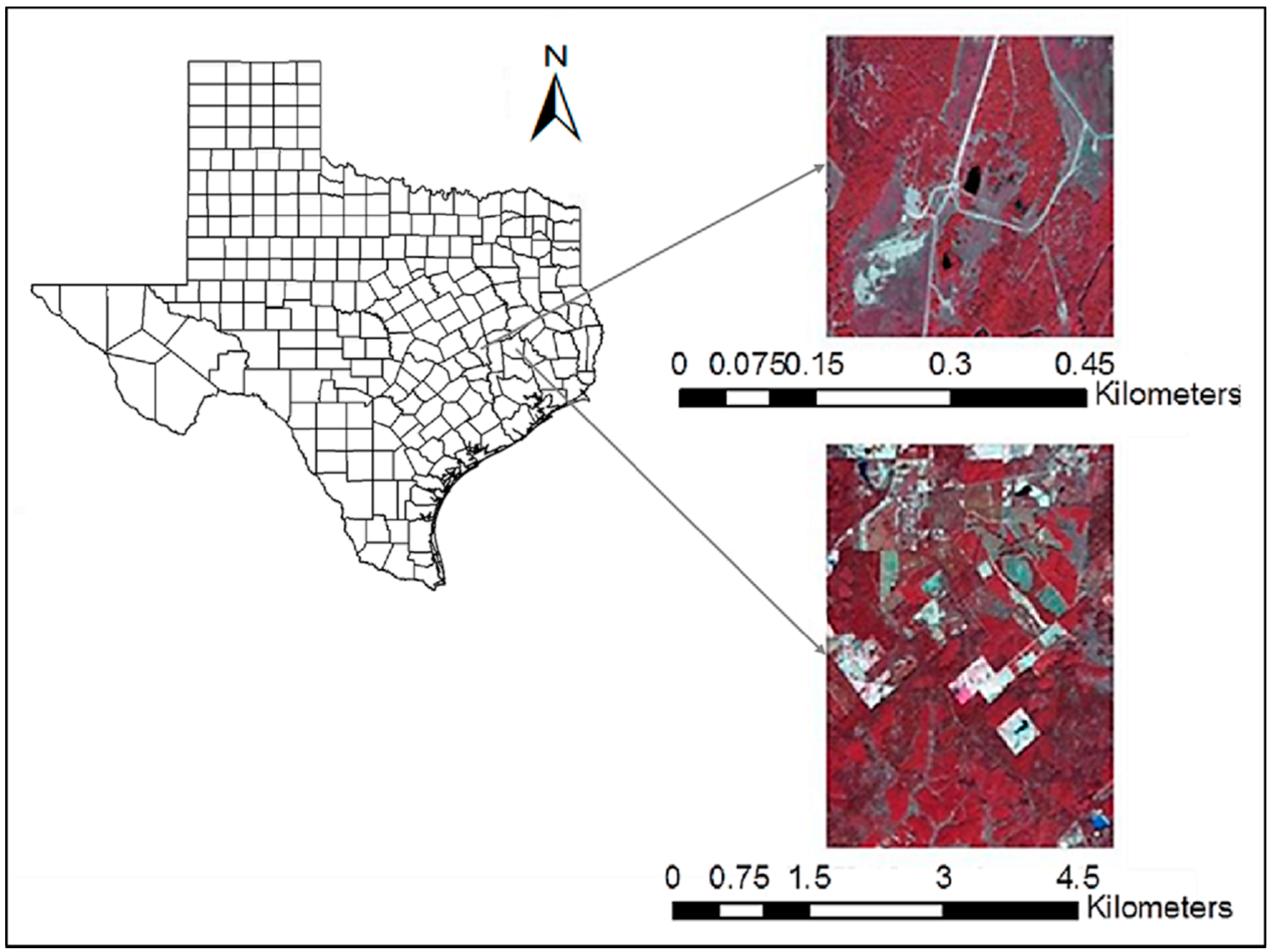
2.1. Study Area

2.2. Data
2.2.1. Terrestrial Laser Scanning Data
2.2.2. Ground Inventory Data
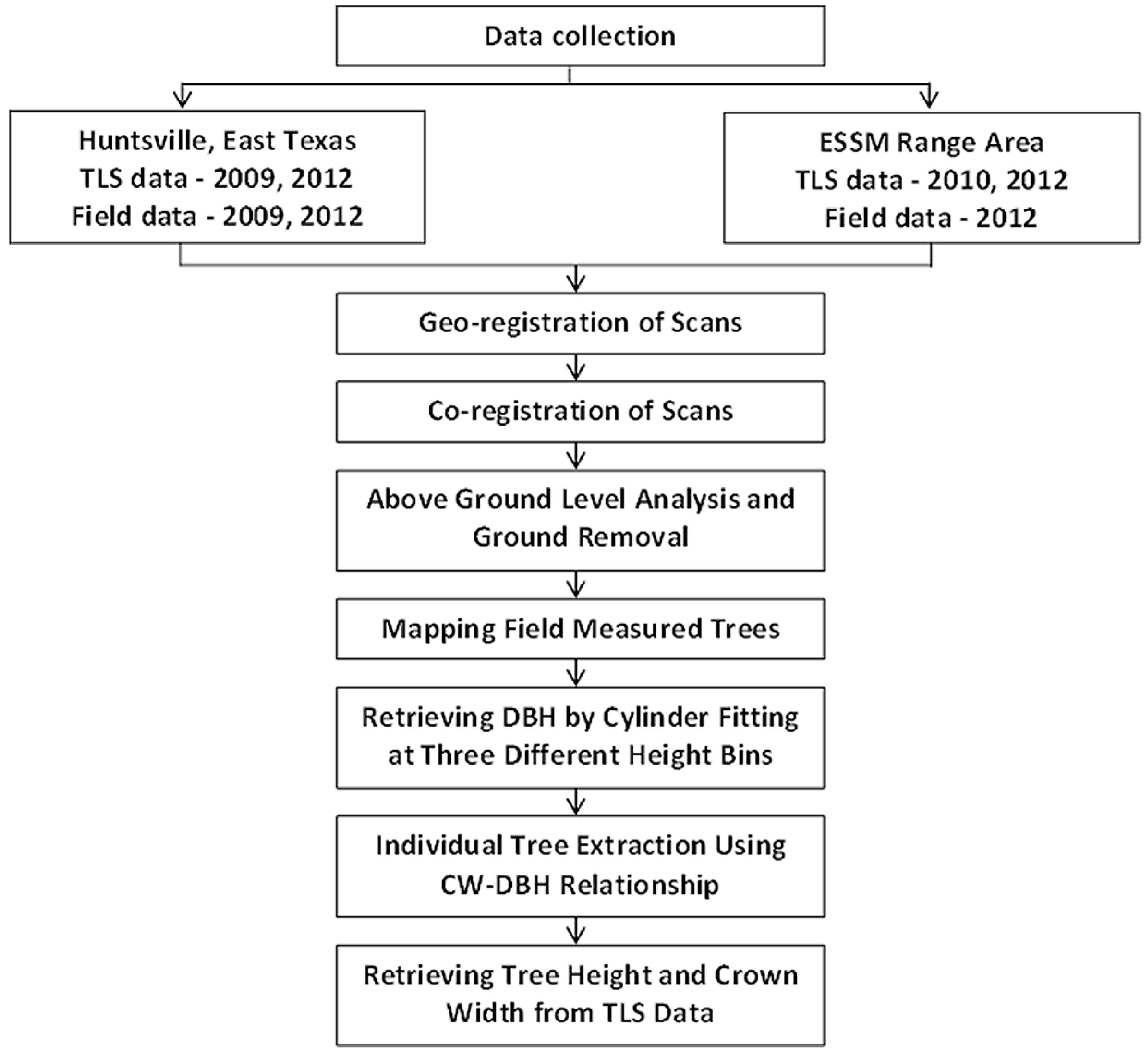
2.3. TLS Data Processing


2.4. Retrieval of Forest Structural Parameters
2.4.1. Retrieval of DBH by Cylinder Fitting

2.4.2. Extraction of Individual trees from TLS Point Cloud
| Species | n a | Equation | R2 | RMSE (m) |
|---|---|---|---|---|
| Loblolly pine | 200 | CW = 0.5973 + 0.1647 × DBH | 0.93 | 0.71 |
| Sweet gum | 80 | CW = 1.2946 + 0.1950 × DBH | 0.77 | 0.67 |
| Oak | 100 | CW = 0.7927 + 0.2635 × DBH | 0.81 | 1.26 |

2.4.3. Retrieval of Tree Height and Crown Width
3. Results and Discussion
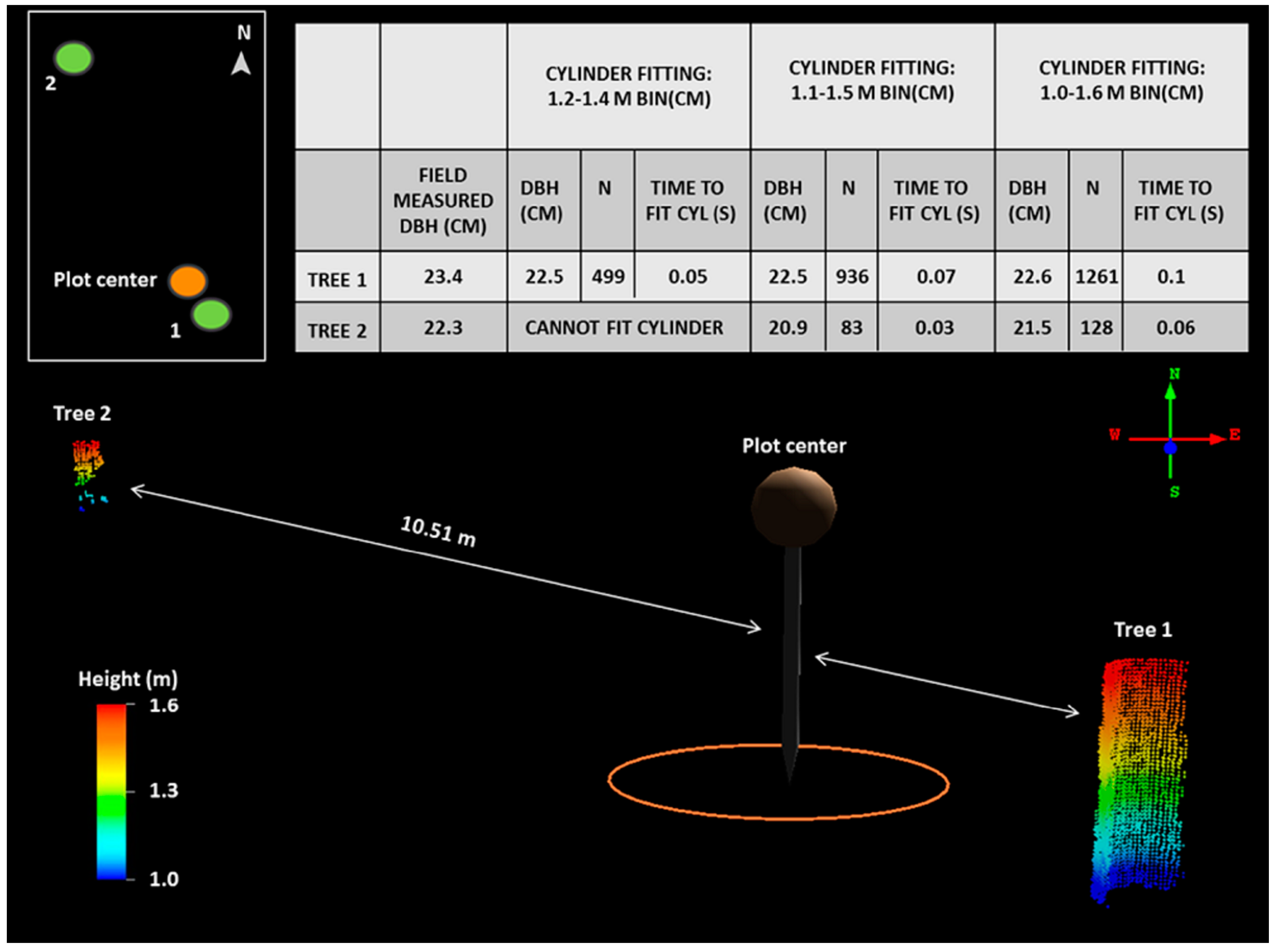
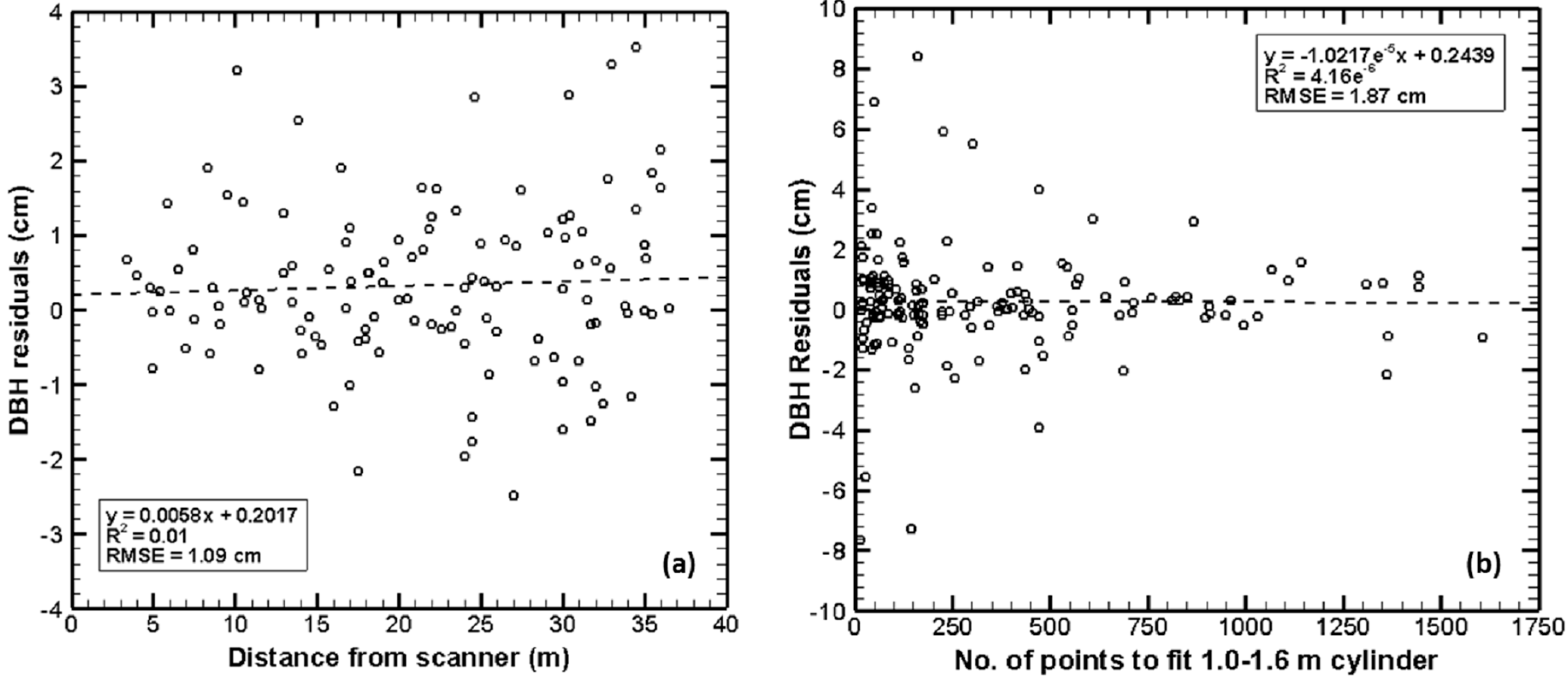
3.1. DBH Measurement by Cylinder Fitting

| Height Bin (m) | n a | R2 | RMSE (cm) |
|---|---|---|---|
| 1.2–1.4 | 122 | 0.96 | 2.13 |
| 1.1–1.5 | 145 | 0.97 | 1.83 |
| 1.0–1.6 | 146 | 0.97 | 1.85 |

| Cylinder Fitting Height Bin (m) | Number of Points to Fit the Cylinder | ||
|---|---|---|---|
| Min | Mean | Max | |
| 1.2–1.4 | 7 | 126 | 544 |
| 1.1–1.5 | 10 | 245 | 1105 |
| 1.0–1.6 | 16 | 359 | 1608 |
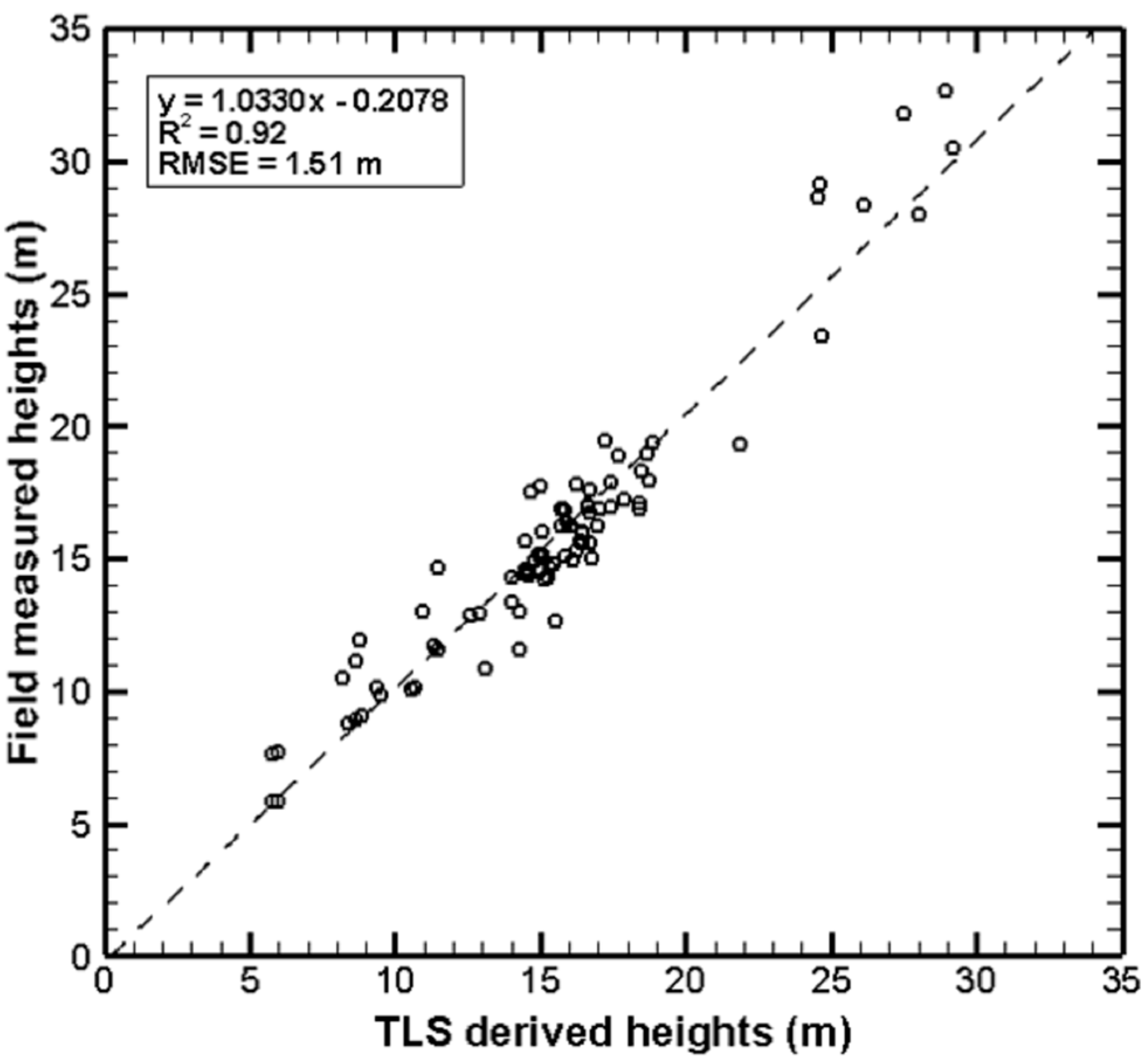
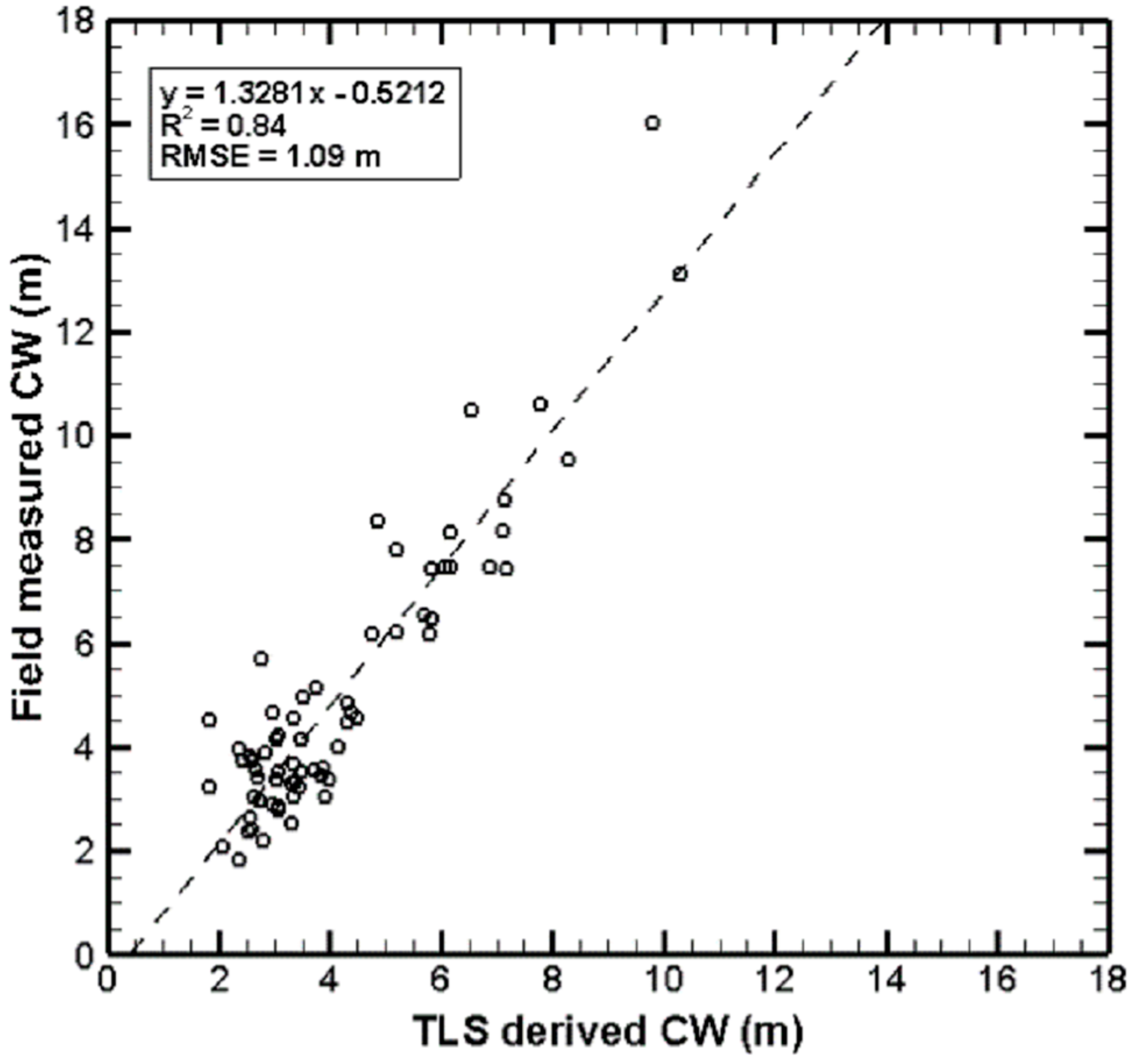
3.2. Retrieval of Tree Height and Crown Width


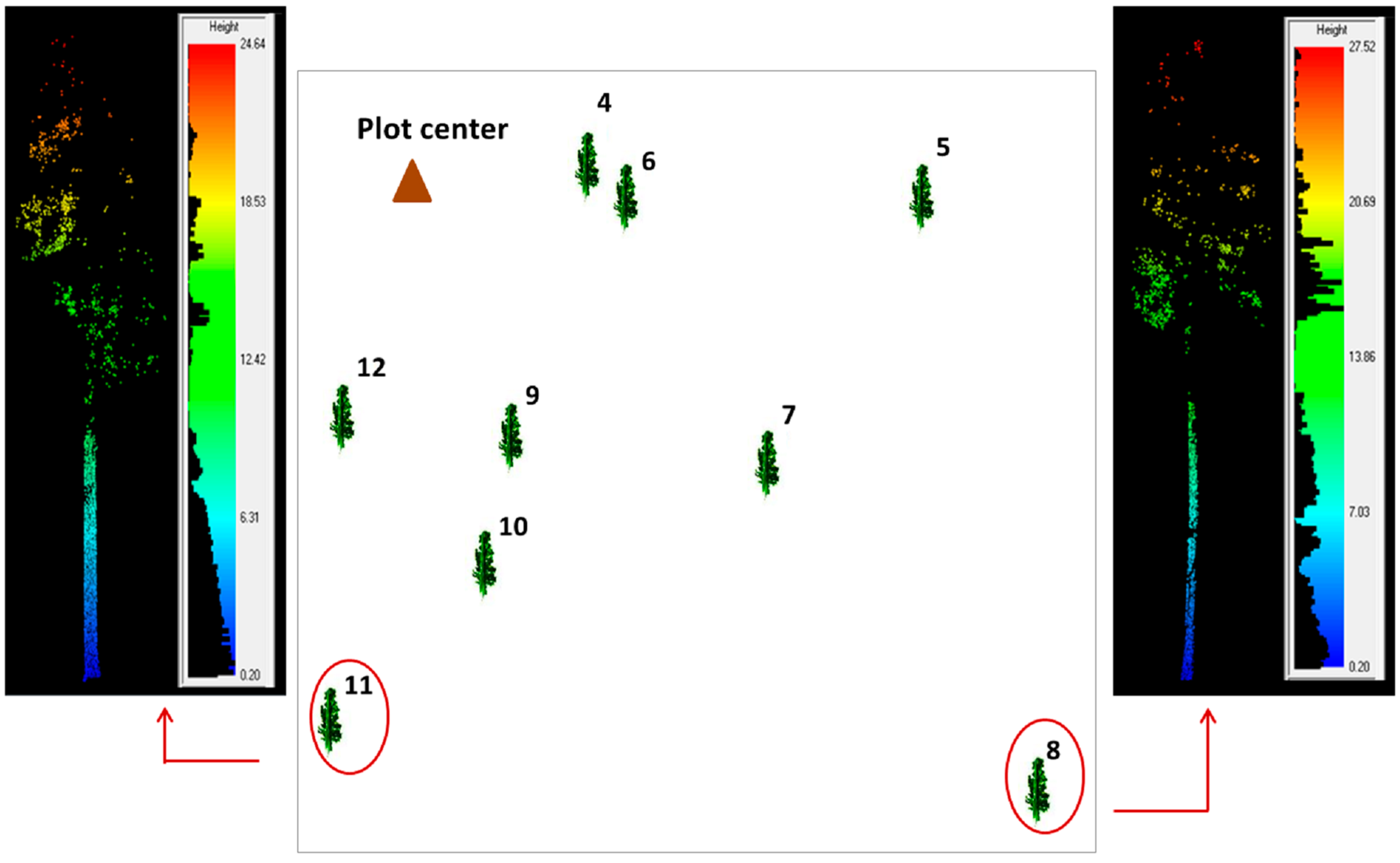
3.3. Influence of Tree Shadowing on the Accuracy of Deriving Tree Measurements

4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Næsset, E.; Gobakken, T.; Holmgren, J.; Hyyppä, H.; Hyyppä, J.; Maltamo, M.; Nilsson, M.; Olsson, H.; Persson, A.; Söderman, U. Laser scanning of forest resources: The Nordic experience. Scand. J. For. Res. 2004, 19, 482–489. [Google Scholar] [CrossRef]
- Kussner, R.; Mosandl, R. Comparison of direct and indirect estimation of leaf area index in mature Norway spruce stands of Eastern Germany. Can. J. For. Res. 2000, 30, 440–447. [Google Scholar] [CrossRef]
- Henning, J.G.; Radtke, P.J. Ground-based laser imaging for assessing three-dimensional forest canopy structure. Photogramm. Eng. Remote Sens. 2006, 72, 1349–1358. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Parker, G.G.; Harding, D.J. LiDAR remote sensing for ecosystem Studies. BioScience 2002, 52, 19–30. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. LiDAR remote sensing of forest structure. Prog. Phys. Geogr. 2003, 27, 88–106. [Google Scholar] [CrossRef]
- Chen, Q.; Gong, P.; Baldocchi, D.; Tian, Y.Q. Estimating basal area and stem volume for individual trees from LiDAR data. Photogramm. Eng. Remote Sens. 2007, 73, 1355–1365. [Google Scholar] [CrossRef]
- Popescu, S.C.; Zhao, K. A voxel-based LiDAR method for estimating crown base height for deciduous and pine trees. Remote Sens. Environ. 2008, 112, 767–781. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Evans, J.S.; Martinuzzi, S.; Gessler, P.E.; Hudak, A.T. Characterizing forest succession with LiDAR data: An evaluation for the Inland Northwest, USA. Remote Sens. Environ. 2009, 113, 946–956. [Google Scholar]
- Srinivasan, S.; Popescu, S.C.; Eriksson, M.; Sheridan, R.D.; Ku, N.W. Multi-temporal terrestrial laser scanning for modeling tree biomass change. For. Ecol. Manag. 2014, 318, 304–317. [Google Scholar] [CrossRef]
- Huang, S.; Hager, S.A.; Halligan, K.Q.; Fairweather, I.S.; Swanson, A.K.; Crabtree, R.L. A comparison of individual tree and forest plot height derived from LiDAR and InSAR. Photogramm. Eng. Remote Sens. 2009, 75, 159–167. [Google Scholar] [CrossRef]
- Zolkos, S.G.; Goetz, S.J.; Dubayah, R. A meta-analysis of terrestrial aboveground biomass estimation using LiDAR remote sensing. Remote Sens. Environ. 2013, 128, 289–29. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Loudermilk, E.L.; Hiers, J.K.; O’Brien, J.J.; Mitchell, R.J.; Singhania, A.; Fernandez, J.C.; Cropper, W.P., Jr.; Slatton, K.C. Ground-based LIDAR: A novel approach to quantify fine-scale fuelbed characteristics. Int. J. Wildland Fire 2009, 18, 676–685. [Google Scholar] [CrossRef]
- Moskal, L.M.; Erdody, T.; Kato, A.; Richardson, J.; Zheng, G.; Briggs, D. LiDAR applications in precision forestry. In Proceedings of Silvilaser2009, College Station, TX, USA, 14–16 October 2009.
- Moskal, L.M.; Zheng, G. Retrieving forest inventory variables with Terrestrial Laser Scanning (TLS) in urban heterogeneous forest. Remote Sens. 2012, 4, 1–20. [Google Scholar] [CrossRef]
- Kankare, V.; Holopainen, M.; Vastaranta, M.; Puttonen, E.; Yu, X.; Hyyppä, J.; Vaaja, M.; Hyyppä, H.; Alho, P. Individual tree biomass estimation using terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2013, 75, 64–75. [Google Scholar] [CrossRef]
- Lovell, J.L.; Jupp, D.L.B.; Culvenor, D.S.; Coops, N.C. Using airborne and ground-based ranging LiDAR to measure canopy structure in Australian forests. Can. J. Remote Sens. 2003, 29, 607–622. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.; Young-Pow, C.; Treitz, P. Assessing forest metrics with a ground-based scanning LiDAR. Can. J. For. Res. 2004, 34, 573–583. [Google Scholar] [CrossRef]
- Bienert, A.; Scheller, S.; Keane, E.; Mullooly, G.; Mohan, F. Application of terrestrial laser scanners for the determination of forest inventory parameters. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2006, 36. Part 5. [Google Scholar]
- Van der Zande, D.; Hoet, W.; Jonckheere, I.; van Aardt, J.; Coppin, P. Influence of measurement set-up of ground-based LiDAR for derivation of tree structure. Agric. For. Meteorol. 2006, 141, 147–160. [Google Scholar] [CrossRef]
- Watt, P.J.; Donoghue, D.N.M. Measuring forest structure with terrestrial laser scanning. Int. J. Remote Sens. 2005, 26, 1437–1446. [Google Scholar] [CrossRef]
- Aschoff, T.; Spiecker, H. Algorithms for the automatic detection of trees in laser scanner data. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2004, 36, 66–70. [Google Scholar]
- Brolly, G.; Kiraly, G. Algorithms for stem mapping by means of terrestrial laser scanning. Acta Silv. Lignaria Hung. 2009, 5, 119–130. [Google Scholar]
- Tansey, K.; Selmes, N.; Anstee, A.; Tate, N.J.; Denniss, A. Estimating tree and stand variables in a Corsican Pine woodland from terrestrial laser scanner data. Int. J. Remote Sens. 2009, 30, 5195–5209. [Google Scholar] [CrossRef]
- Thies, M.; Spiecker, H. Evaluation and future prospects of terrestrial laser scanning for standardized forest inventories. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2004, 36, 192–197. [Google Scholar]
- Wezyk, P.; Koziol, K.; Glista, M.; Pierzchalski, M. Terrestrial laser scanning versus traditional forest inventory. First results from the Polish forests. Int. Arch. Photogram. Rem. Sens. Spat. Inf. Sci. 2007, 36, 424–429. [Google Scholar]
- Dubayah, R.O.; Drake, J.B. LiDAR remote sensing for forestry. J. For. 2000, 98, 44–46. [Google Scholar]
- Chasmer, L.; Hopkinson, C.; Treitz, P. Investigating laser pulse penetration through a conifer canopy by integrating airborne and terrestrial LiDAR. Can. J. Remote Sens. 2006, 32, 116–125. [Google Scholar]
- Evans, D.L.; Roberts, S.D.; Parker, R.C. LiDAR A new tool for forest measurements? For. Chron. 2006, 82, 211–218. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with LiDAR and assessing its influence on estimating forest volume and biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Johnsen, K.H.; Wear, D.; Oren, R.; Teskey, R.O.; Sanchez, F.; Will, R.; Butnor, J.; Markewitz, D.; Richter, D.; Rials, T.; et al. Meeting global policy commitments: Carbon sequestration and southern pine forests. J. For. 2001, 99, 14–21. [Google Scholar]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne LiDAR. Biomass Bioenerg 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Kociuba, W.; Kubisz, W.; Zagórski, P. Use of Terrestrial Laser Scanning (TLS) for monitoring and modelling of geomorphic processes and phenomena at a small and medium spatial scale in Polar environment (Scott River—Spitsbergen). Geomorphology 2014, 212, 84–96. [Google Scholar] [CrossRef]
- Leica Cyclone (Version 7.1.3). Available online: http://hds.leica-geosystems.com/en/Leica-Cyclone_6515.htm (accessed on 26 January 2015).
- Applied Imagery, 2010. Quick Terrain Modeler (Version 7.1.4). Available online: http://www.appliedimagery.com (accessed on 26 January 2015).
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the LiDAR point cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- McGaughey, R.J. FUSION/LDV: Software for LIDAR Data Analysis and Visualization; USDA Forest Service, Pacific Northwest Research Station: Seattle, WA, USA, 2014.
- Pueschel, P.; Newnham, G.; Rock, G.; Udelhoven, T.; Werner, W.; Hill, J. The influence of scan mode and circle fitting on tree stem detection, stem diameter and volume extraction from terrestrial laser scans. ISPRS J. Photogramm. Remote Sens. 2013, 77, 44–56. [Google Scholar] [CrossRef]
- Williams, M.S.; Bechtold, W.A.; LaBau, V.J. Five instruments for measuring tree height: An evaluation. South. J. Appl. For. 1994, 18, 76–82. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Srinivasan, S.; Popescu, S.C.; Eriksson, M.; Sheridan, R.D.; Ku, N.-W. Terrestrial Laser Scanning as an Effective Tool to Retrieve Tree Level Height, Crown Width, and Stem Diameter. Remote Sens. 2015, 7, 1877-1896. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70201877
Srinivasan S, Popescu SC, Eriksson M, Sheridan RD, Ku N-W. Terrestrial Laser Scanning as an Effective Tool to Retrieve Tree Level Height, Crown Width, and Stem Diameter. Remote Sensing. 2015; 7(2):1877-1896. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70201877
Chicago/Turabian StyleSrinivasan, Shruthi, Sorin C. Popescu, Marian Eriksson, Ryan D. Sheridan, and Nian-Wei Ku. 2015. "Terrestrial Laser Scanning as an Effective Tool to Retrieve Tree Level Height, Crown Width, and Stem Diameter" Remote Sensing 7, no. 2: 1877-1896. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70201877