1. Introduction
1.1. Aerial Archaeological Photography
The established practice of aerial archaeological reconnaissance is quite straightforward. In general, photographs are acquired from the cabin of a low-flying aircraft (preferably a high-wing airplane) using a small- or medium-format hand-held photographic still frame camera [
1]. Once airborne, the archaeologist flies over targeted areas and tries to detect possible archaeologically-induced visibility marks (predominantly vegetation and soil marks). As the appearance of visibility marks depends on the position of the Sun, site and camera, any detected archaeological feature is orbited and commonly documented from various oblique viewpoints. Often, zoom lenses are used, and the focal length is deliberately changed while photographing the archaeological features.
This type of observer-directed reconnaissance will yield a few hundred photographs per flight. When applied systematically, aerial archaeological photography quickly results in thousands of photographs, all in need for proper archiving. In a second step, the resulting photographs serve as a basis for interpretative mapping, which necessitates an appropriate orthorectification of each photograph.
The main purpose of any image archive is to allow quick access of desired images based on their content and location. Therefore, next to a description of the technical parameters and depicted content, georeferencing of every image is of vital importance. This can be either done by identifying the main photographed object (georeferencing of the image content) or by mapping the center point and/or the outline of the image footprint. Although the term “image footprint” is generally used in air- or space-borne remote sensing, it is defined here as “the object area covered by the image” so that it can be applied to terrestrial imaging, as well.
So far, no camera-independent, cost-effective solution is available that allows one to directly geolocate image footprints. Building on two previous publications [
2,
3], this paper proposes such a workflow building on a cost-effective hardware and software solution. After a short description of the underlying photogrammetric principles and the introduction of the utilized hardware components, the software that allows recording and estimating these parameters, as well as embedding them into the image metadata is introduced. Afterwards, the obtainable accuracy in airborne conditions are calculated and discussed.
1.2. Georeferencing in Aerial Photography
A few decades ago, georeferencing of a photograph usually involved marking the location of the scene or object depicted in each photograph on copies of maps by hand. Because flying paths and photo locations are never predefined in an aerial archaeological oblique reconnaissance approach and accurate mapping and photo interpretation necessitates knowledge about the part of the Earth’s surface covered by the aerial image, one would rely on flight protocols, listing photographed objects and their rough position. Still, one was often faced with the problem that in certain areas, it is difficult to locate the image based on its content because of missing distinct features. Similar problems occur when georeferencing a photograph’s content in areas where field boundaries are either non-existent or too far from the area of an image for use in mapping. In the worst-case scenario, retrieving the exposure location of a specific photograph might even prove impossible.
With the advent of Geographic Information Systems (GIS) and hand-held GPS (Global Positioning System) devices during the 1990s, finding the contents of aerial photographs on maps became easier. While their main purpose was to allow easy navigation in aviation, the GPS devices could record waypoints and flightpaths. This allowed a quicker allocation of aerial photographs on maps, since the stored information could be used as a good estimate of the location of the photographed site [
4]. The advent of digital photography announced a new age for archaeological documentation. Since the exact time and specific camera parameters related to the image acquisition were now directly and unambiguously stored inside the Exif (exchangeable image file format) metadata fields of the image, also the documentational and archival value of the photographs improved. During the first decade of the 21st century, a new generation of global navigation satellite system (GNSS) devices could be attached to a camera and allowed direct GNSS recording storing the coordinates of the camera location into the respective fields in the Exif header of the digital image [
5]. While this was another milestone for quicker geolocating of the contents of aerial photographs, it was still not an ideal solution, as the GNSS is recording “only” its own position, which is more or less close to the photograph’s camera position. Depending on the flying height and obliquity of the aerial photograph, the actual position of the photographed object can be a few hundred meters away from the position of the camera (see also [
6]).
Furthermore, at least in GIS-based archiving systems [
7], it has become desirable to switch from georeferencing the photograph’s content to georeferencing of the photograph itself, which involves mapping the outline of each photograph’s footprint. This means that next to its center point, at least all four corners of the image need to be mapped. As this can be extremely time consuming, an automated workflow is desirable. In previous papers [
2,
3], the authors have proposed a solution based on a low-cost global navigation satellite system/inertial measurement unit (GNSS/IMU) hardware. This consisted of the ArduPilot Mega 2.0 (APM 2.0—Open Source Hardware under Creative Commons 3.0, 2012), an open source autopilot system featuring an integrated MediaTek MT3329 GNSS chipset, a three-axis magnetometer and a six-axis gyro and accelerometer device. Although accurate results could be obtained in static conditions (as in terrestrial photography), this solution was not sufficient for the dynamic conditions of a moving aircraft. Even after replacing the unreliable APM 2.0’s GNSS receiver by a better one (Garmin eTrex), the projected image center could only be mapped with an accuracy between 140 m and 300 m. While this might be good enough for simple and small-scale archiving purposes (
i.e., documenting image locations as dots on 1:50,000 maps), the solution was not suitable for documenting a reliable footprint of aerial images.
Therefore, the system had to be improved. This was done by utilizing a different hardware solution based on the Xsens MTi-G-700-GPS/INS, which is presented in this paper. After a description of the underlying photogrammetric principles, the new solution will be described and its accuracy demonstrated. Finally, its use within aerial archaeology will be discussed.
3. Requirements for a Recording System
As can be gathered from the Introduction, a recording system is desirable that allows one to automatically retrieve the footprint of each photographed image. The aim of this research was therefore to link a digital camera with a cost-effective hardware solution to observe all exterior orientation parameters at the moment of image acquisition, so that the depicted object area can be computed (using a reference surface) and stored. For the purpose of aerial photography, the system should fulfil a few requirements, as outlined in the following.
- (1)
The accuracy and precision of the estimated exterior orientation must be sufficient for automated image archiving and, if possible, to aid enhanced, software-based image orientation and camera calibration. The footprints are mainly needed to allow quick access to aerial photographs by a simple search operation in a GIS-based archive, which outputs a list of every aerial photograph that covers a desired area defined by a point or polygon. From our long-term working experience with archaeological aerial photographs, the accuracy of the footprint’s corner points should be within a range of 10% of the respective image edge. With full frame cameras (sensor size of 24 mm × 36 mm) at usual flying heights between 300 m and 500 m and focal lengths between 24 mm and 120 mm, the maximum allowed offset lies between 9 m (120 mm lens at 300 m flying height) and 75 m (24 mm lens at 500 m flying height) for the image width of a vertical photograph. More specifically to have an approximation of the angle error limits for the oblique case, we are using 10% of the length the shortest footprint edge as reference to determine the error limits of the pitch angle. Using a flying height of 300 m and a 120 mm lens and pitch angles from 50° (towards vertical) up to 25° (towards horizontal image), a pitch angle error of 1° is shifting the center point always less than the stated 10% of the shortest image width. Therefore, 1° is a good specification of the standard deviation of the errors of the system.
- (2)
To obtain the required accuracy, the hardware needs to be directly and firmly attached to the camera in a way that no error is introduced to the angular measurements during a reconnaissance flight. Re-mounting of the device should be possible without the necessity to re-calibrate the whole imaging system.
- (3)
The hardware of the system should contain off-the-shelf components that enable a straightforward logging of all essential parameters for further handling in a software-based processing chain.
- (4)
The used components should be of moderate cost.
- (5)
The system should be easy to handle. The hardware should not be bulky to allow undisturbed camera handling in the usually limited space of an aircraft’s cockpit. Furthermore, mounting of the equipment, as well as data download and charging of the batteries should be straightforward.
- (6)
The system should be flexible enough to work both in airborne and terrestrial environments, while allowing one to use different camera-lens combinations.
- (7)
The resulting exterior orientation should be saved inside the Exif metadata tags of the image, as well as an additional sidecar file (for image formats that do not allow manipulation).
- (8)
The software to calculate the image’s footprints should be straightforward and function with minimal user interaction (i.e., be semi-automatic).
These requirements necessitate a trade-off between the costs, handling and accuracy of the system. The demanded precision of 10 percent of the image width does not seem to be too restrictive regarding the inner orientation of the used camera system and leaves room for choosing a non-calibrated camera with a zoom lens. This means, on the one hand, that all parameters of the interior orientation can change with different zoom settings. On the other hand, at the demanded accuracy, the inner orientation is less problematic and can be estimated: the coordinates of the principal point can be set equal to the image center. Furthermore, when the camera is focused at infinity (which is the case in aerial photography), the value of the principal distance equals the focal length of the lens [
11]. When zooming, a more or less accurate focal length can be retrieved from the Exif header of each image. Although radial distortion can be quite significant in consumer lenses, it is again less problematic for the described purpose and accuracy.
Therefore, only the parameters of the exterior orientation (coordinates of the projection center and the three rotation angles defining the camera’s direction) have to be measured directly using a combined GPS and inertial navigation system (INS). Here, the demanded accuracy is, however, more restrictive. Low-cost commercial solutions and a previously-proposed low-cost system based on the ArduPilot Mega 2.0 [
2,
3] produced insufficiently accurate results. Therefore, a different and more expensive hardware solution had to be found and compiled.
4. Exterior Orientation Solution
4.1. Hardware
The present solution is based on the Xsens MTi-G-700-GPS/INS. The Xsens solution provides geographical coordinates through its GPS receiver, while camera rotation angles are provided by the inertial measurement unit (IMU). This is, however, not a simple task and is usually done by a Kalman filter. A Kalman filter “represents a general form of a recursive least-squares adjustment implementing time updates (dynamic model) of the state vector and its variance-covariance matrix. These time updates are based on the prediction of the present into the future state” [
13]. When the track of a vehicle is estimated using an IMU together with other sensors and one or more navigational computers, the term INS is applicable. More specifically, our Xsens MTi-G GPS/INS solution contains accelerometers, vibration-resistant gyroscopes, magnetometers, an integrated 50-channel GPS L1 receiver, a static pressure sensor and a temperature sensor in a light, miniature box (58 g; W × L × H = 57 mm × 42 mm × 24 mm) to offer complete and high-quality position and orientation [
14].
Xsens technologies claims a 0.2° (max 0.25°) and a 0.3° (max 1.0°) roll and pitch accuracy for static and dynamic conditions, respectively, whereas yaw should always be around 1.0°. Raw horizontal positional data should be in the range of 2 m at 1 σ when using a satellite-based augmentation system, e.g., EGNOS, and 5 m for the vertical component [
15].
To enable a proper and permanently stable IMU mounting, the GPS/INS was not installed on the hot shoe (as was the case in the APM 2.0 approaches and some commercial alternatives, e.g., 3D Image Vector of REDcatch and the GeoSnap Pro from FieldOfView), but screwed in the external battery grip of the Nikon D800/D810 (
Figure 3). Since most mid- and high-end digital reflex (D-SLR) cameras feature such an external battery grip, this solution can be transferred to most D-SLR cameras. Moreover, the fixed and stable orientation with respect to the camera’s sensor and optics makes multiple boresight mounting calibrations superfluous (see below). The GPS antenna is connected by a 2 m-long cable to the box, which houses the GPS/INS. Only in the subsequent model, the MTi-G-710-GPS/INS, a GNSS receiver was built-in, which uses more than just the US-American GPS satellites [
14].
Besides the GPS/INS, the battery grip also features an Avisaro data logger, which saves the GPS/INS stream (with 200 Hz for the orientation, 50 Hz for the positional information and 4 Hz for the raw GPS stream) on a standard SD memory card. The GPS/INS is configured in such a way that on-the-fly Kalman-filtered results are provided and logged. The chosen Kalman filter strategy (Xsens naming: GeneralNoBaro) only relies on the positional and velocity data provided by the GPS, as well as the rotational plus acceleration data delivered by the IMU, thus discarding the magnetometer heading and barometric information. The strategy was opted for since the magnetometer measures the total magnetic field, which gets too disturbed by an airplane’s electrical instruments and metal construction parts.
A standard flash sync cord with a coaxial PC (Prontor/Compur) 3.5-mm connector, attached with a locking thread to the camera’s flash-sync terminal, enables the synchronization between the camera and the GPS/INS data stream. Every time the shutter button is fully pressed, the PC sync terminal electrically closes a switch and releases a signal, which is detected by the INS and saved in its data stream. Since this sync terminal provides a highly accurate time stamp and the generated pulse is very clear, it allows one to distinguish every individual photograph. As such, the data stream holds a flag that allows one to assign the exposure time stamps according to the ordering of the photographs, indicating which exterior orientation values correspond to which exposure.
The whole unit is powered by the standard Nikon battery, which is normally housed by the battery grip. Currently, the battery is attached underneath the battery grip, although a more elegant and smaller solution is forthcoming.
4.2. Software
After a reconnaissance flight, all of the images and the log file(s) are downloaded from the SD cards, and a custom-built MATLAB script takes care of all of the necessary post-processing. The script has three main functions:
It checks the integrity of all data sources, calculates the exterior orientation (including an optional mounting; see [
2]) and synchronizes the correct exterior orientation values with the respective photographs. This exterior orientation is also stored in newly-defined Exif metadata fields and/or in a separate text-based sidecar file.
The MATLAB script automatically computes the location of the ground-projected image center (i.e., not the true ground principal point, but rather the ground image center), as well as the location on the ground of the complete image footprint. The latter is computed using the focal length and image size of each image, supplemented with elevation data from a global Web Map Service (WMS) provider. Both the ground image center and footprint are stored as ESRI Shapefiles and the coordinates of the four footprint corners and ground image center are also saved in newly-defined Exif metadata fields. Besides, the complete file path and all information gathered from the first and second step can be exported as an ASCII file.
The software provides a simple GUI for monoplotting the images (all or a specified selection). Although not a rigorous orthorectification (e.g., no camera calibration and topography are taken into account), the projective transformation executed during monoplotting delivers a rectified photograph that already allows for a first assessment of the collected imagery, while the results are also good enough for archival purposes.
Before execution, the software provides the user a series of yes/no questions, thus enabling a very flexible means of creating a specific output (e.g., no footprints and sidecar files or footprints, sidecar files and rectified images). This allows for a multitude of workflows and enables a semi-automatic and straightforward execution of all processing steps. All delivered coordinates are stored in a WGS84/UTM projection where the zone is set automatically.
6. Discussion and Outlook
The results clearly demonstrate that the new hardware solution based on the Xsens MTi-G-700-GPS/INS delivers exterior orientation parameters that are sufficiently accurate to calculate footprints at the desired accuracy. To further test the hardware in terms of ease of usability and handling, stability, endurance and the accuracy of the results, it was used during flights of the aerial archaeological reconnaissance season 2015. The hardware setting was the same as listed in Flight 3 (see
Table 1) using a Nikon D810 equipped with a Nikon AF-S Nikkor 24–120 mm f/4G ED VR.
In the following, some examples from one of the archaeological reconnaissance flights on 11 August are displayed and discussed. During this flight, which took approximately 1 h, 191 oblique aerial photographs were taken over various sites south and east of Vienna.
Figure 9 shows the recorded flightpath (white line) and the calculated footprints (red) from all photographs, which were taken during the flight over the area of Carnuntum.
The system proved to be easy to handle. No special training and instruction were needed. Attaching the hardware to the camera is straightforward, since the GPS/INS is directly and firmly attached to the Nikon camera using the off-the-shelf external battery grip. Otherwise, the only operations needed before a flight are to switch on the GPS/INS device and connect the camera via the flash sync cord.
Using the camera’s external battery grip ensures a proper and permanently stable IMU mounting. This is important, as it enables the user to detach and re-attach the device to the camera without the need of repeated boresight mounting calibration. Furthermore, since most mid- and high-end digital reflex cameras feature such an external battery grip, this solution can be transferred to most D-SLR cameras. Although the device adds some 5 cm to the bottom of the camera, the device does not feel bulky during operation.
Currently, the only drawback during operation is the fact that the GPS receiver is connected by a 2 m-long cable and is placed in the front of the cockpit to ensure good satellite receiving conditions. The distance between camera and GPS receiver is usually less than 1.5 m. Given the (in) accuracy of the GPS position in flying conditions, this is not considered to be a critical factor for the overall accuracy of the exterior orientation parameters. However, handling multiple cameras at the same time (we currently swap an unmodified RGB, a near-infrared-modified and a near-ultraviolet-modified camera when making oblique aerial archaeological photographs) could result in cable tangling if all cameras were connected to separate GPS devices. Further tests will therefore be done to see whether the GPS receiver can also be firmly attached directly to the camera (e.g., on the hot shoe) without any loss of GPS signal quality.
Since a standard Nikon battery is used for powering the system, an endurance that is long enough to record the camera position and orientation during an entire flight (at a maximum of six hours, defined by the tank of the used Cessna aircrafts) is ensured. As an additional advantage, no additional charger is necessary, since the battery can be charged by the standard Nikon charger.
While in the validation section, the accuracy of the angular measurements and the GPS position were investigated, this section also discusses the achieved accuracy in terms of archival needs. The accuracy of the derived footprints turned out to be sufficient for archaeological survey demands.
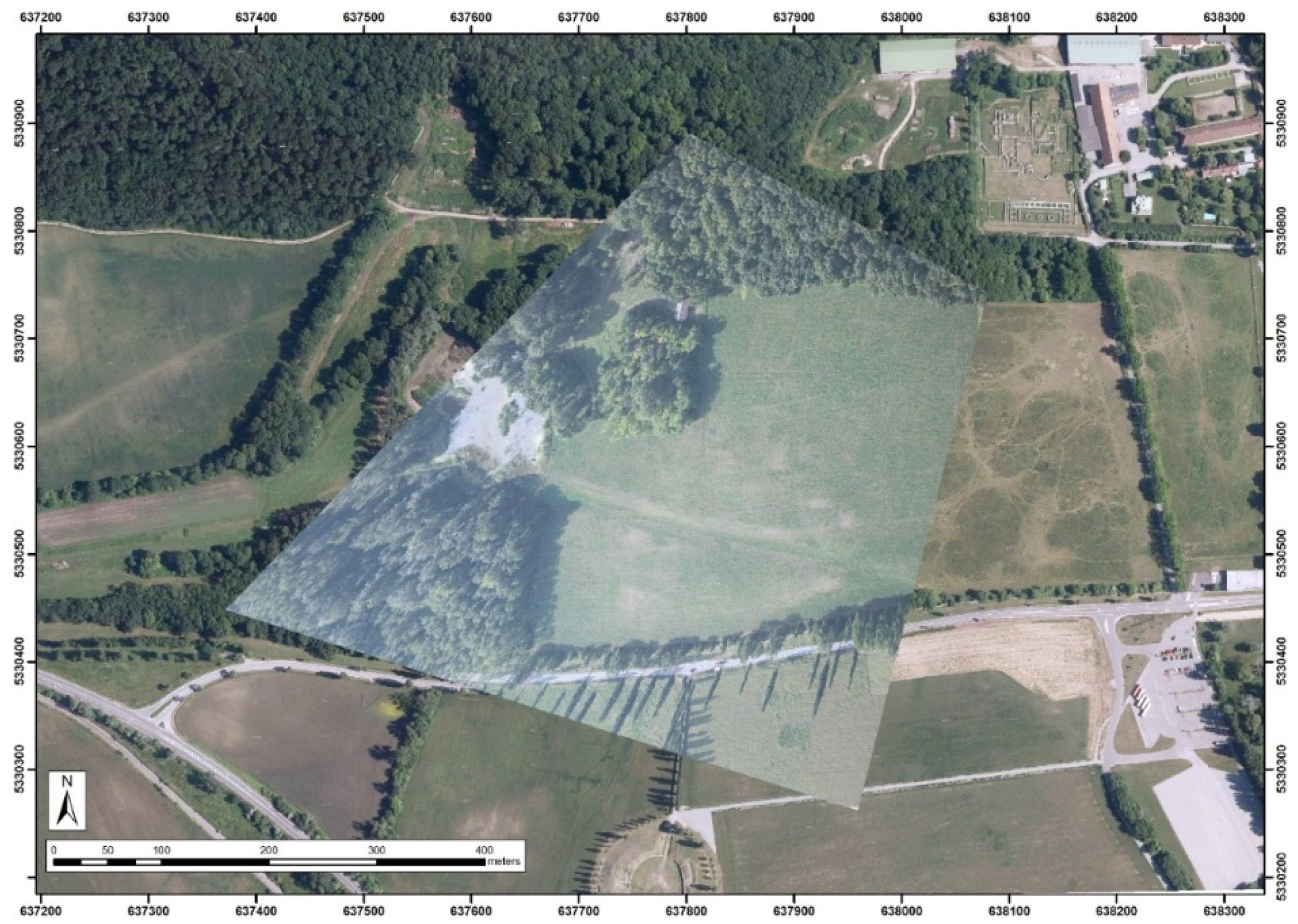
Figure 10 displays the transformation of a low-oblique photograph based on its calculated footprint. While the sides of the trapezoidal footprint measure between min 315 (north) and max 620 m (west), the positional errors of object points lie between 6 m (foreground of photo,
i.e., north) and 20 m (background, southern edge). This error lies between only 2% and 3% of the side length.
In
Figure 11 a high-oblique photograph is monoplotted. Here, the inaccuracies of the positioning of the corners are expected to be far higher in the background than in the low-oblique case of
Figure 10. While the sides of the trapezoidal footprint measure between min 512 (west) and max 4000 m (south), the positional errors of object points lie between 26 (foreground of photo,
i.e., north) and 400 m (background, southern edge), which corresponds to 5% (foreground) and 10% (background) of the side length. Still in this extreme case, the inaccuracies of the footprint meet our demand stated above in
Section 3.
Overall, the results demonstrate that the accuracy and precision of the provided exterior orientation is more than sufficient for automated image archiving of aerial archaeological frame imagery. Throughout all mentioned flight maneuvers, the accuracy stayed within the required limits of 10% of the image width. However, the transformations would not be accurate enough for direct interpretative mapping, since the latter still needs a separate and dedicated orthorectification of the imagery. However, the footprints are used and integrated into our archiving workflow, where they are stored in a data layer within our GIS-based archive (Archaeological Prospection Information System (APIS); see [
7]) and as such enable a fast and accurate retrieval of images that cover a specific geographical location.
Moreover, this information can be used in speeding up the orthophoto and DSM creation in a computer vision-based workflow. Since its introduction in archaeological research about fifteen years ago (e.g., [
18,
19]), the computer vision techniques known as SfM and dense multi-view stereo (MVS) became very popular in archaeology. Nowadays, an SfM and MVS pipeline (generally called image-based modelling) can almost be considered a standard tool in many aspects of both aerial and terrestrial archaeological research (e.g., [
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33]). Even though besides the camera pose, also the parameters of inner orientation may be computed during the SfM stage [
34,
35], the internal camera parameters can be accurately determined beforehand by a geometric camera calibration procedure [
36]. This leaves only the exterior parameters to be computed, and the SfM algorithm can benefit from initial values that are provided by the IMU and GNSS log files, which means that processing time and gross relative orientation errors of the photographs can be minimized. This is incorporated into OrientAL [
37], a photogrammetric package recently developed with the financial support of the Austrian Science Fund (FWF P24116-N23). Besides the relative image orientation, OrientAL also aims to automate the process of absolute orientation by automatically extracting GCPs from existing datasets (further details can be found in [
37]). A validation of our complete OrientAL-based workflow, using the logged camera positions and rotation angles as initial values, will be the topic of a further paper.
7. Conclusions
The paper proposes a new image archiving workflow, which allows one to automatically derive both the center point and image footprint from oblique aerial photographs made using consumer D-SLR cameras. The proposed workflow is based on the parameters that are logged by a commercial, but cost-effective GNSS/IMU solution and processed with in-house-developed software.
The presented solution is based on the Xsens MTi-G-700-GPS/INS providing both geographical coordinates through its GPS receiver and, using a Kalman filter, camera rotation angles by the inertial measurement unit. The GPS/INS was tested with both a Nikon D800 and a D810 camera. Proper and permanently stable IMU mounting is realized by utilizing the external battery grip of the Nikon D800/D810 as a container for the IMU.
The on-the-fly Kalman-filtered GPS/INS data stream (with 200 Hz for the orientation, 50 Hz for the positional information and 4 Hz for the raw GPS stream) is saved on a standard SD memory card. The post-processing software is a custom-built MATLAB-based program. It calculates and stores the exterior orientation of each photograph, computes the location of ground-projected image center and footprint and optionally executes a projective transformation of each image.
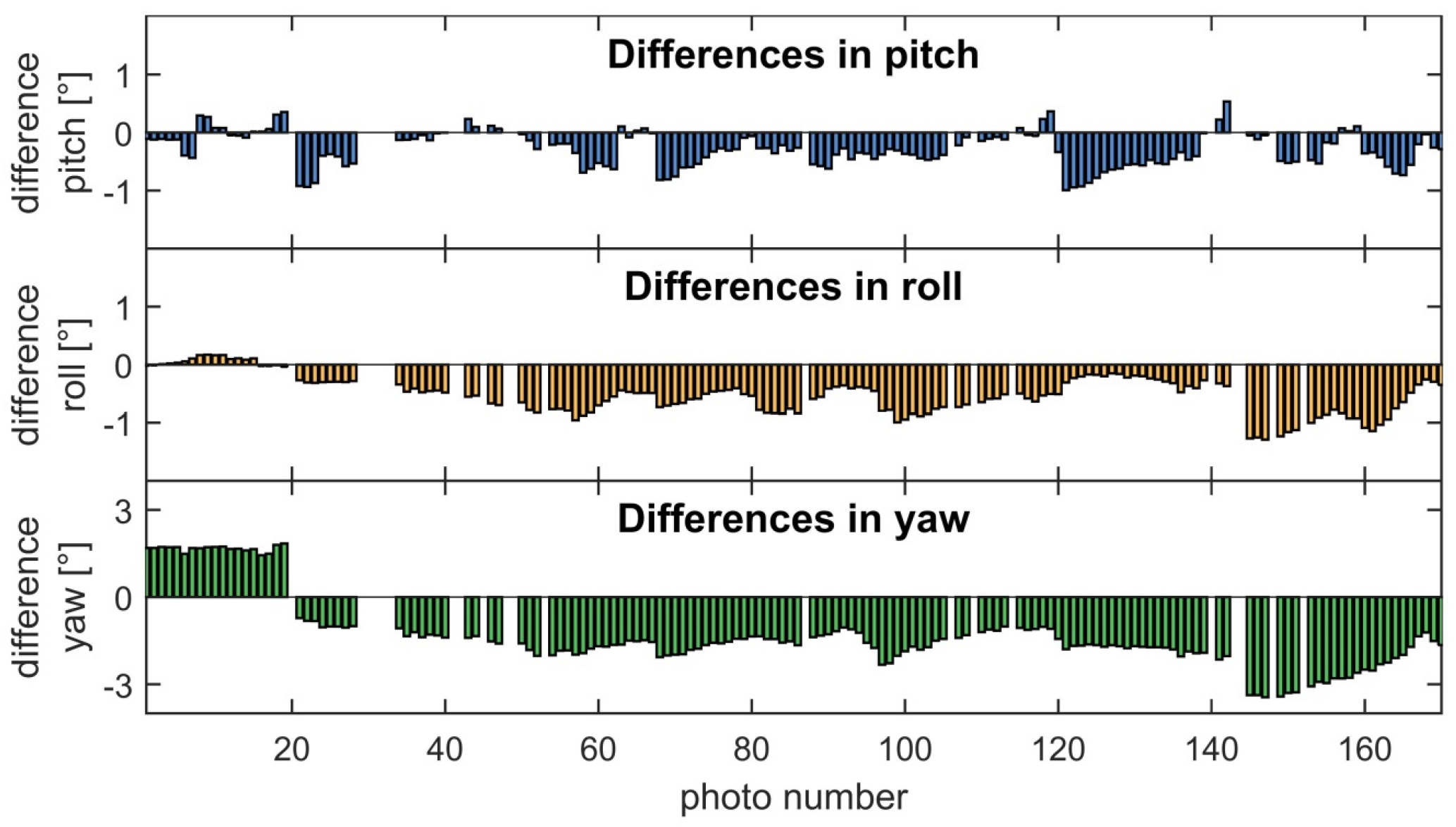
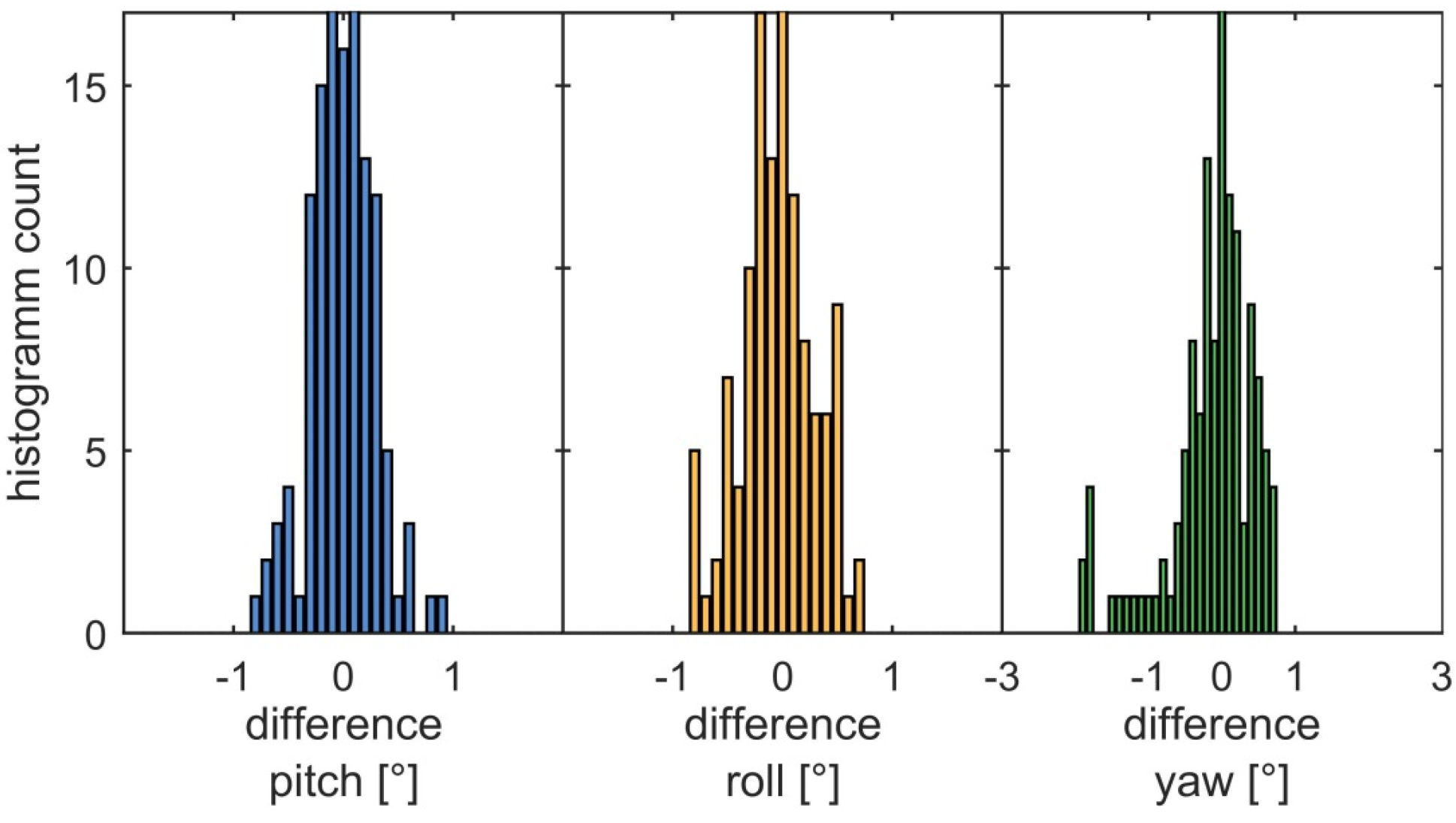
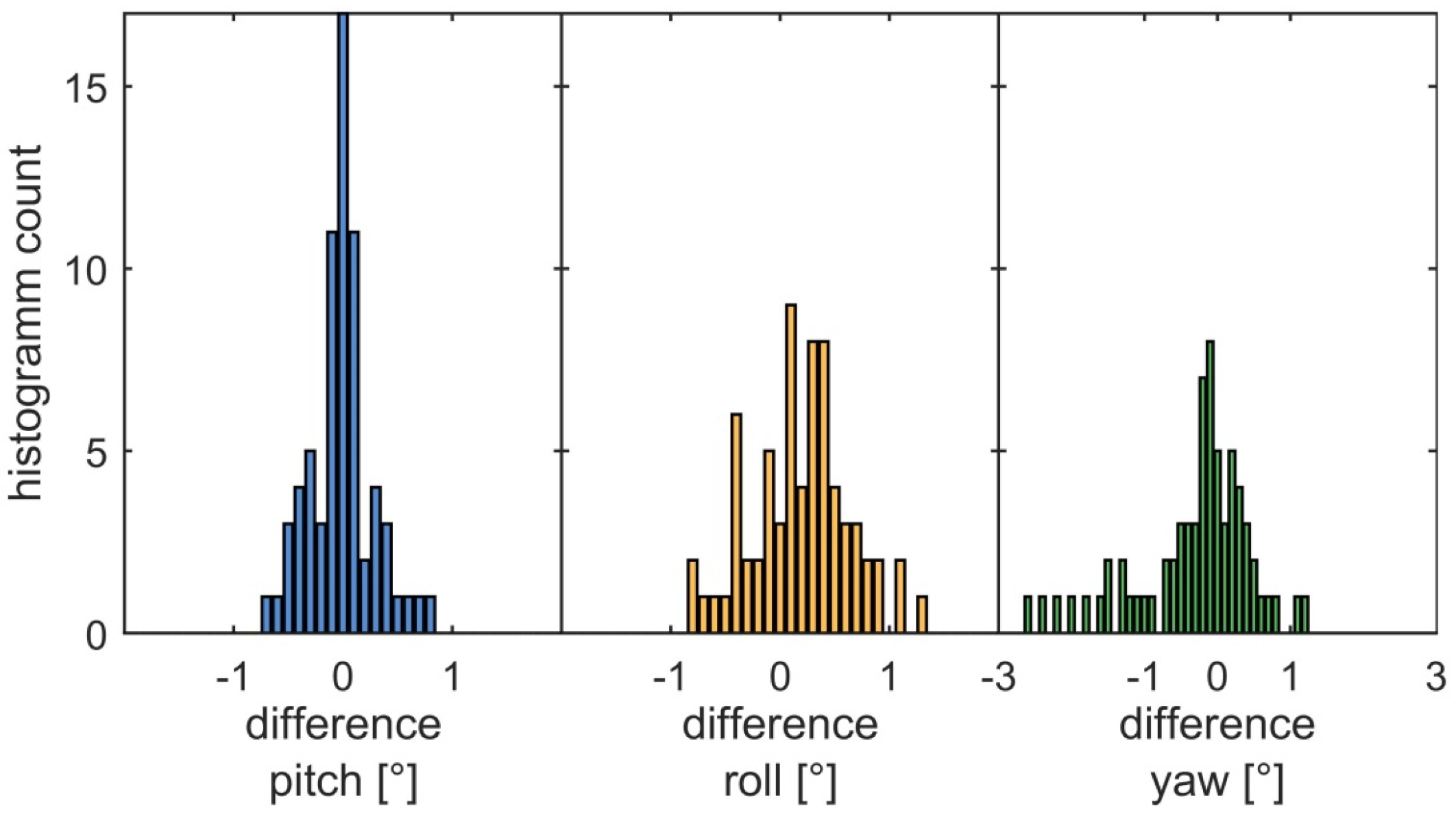
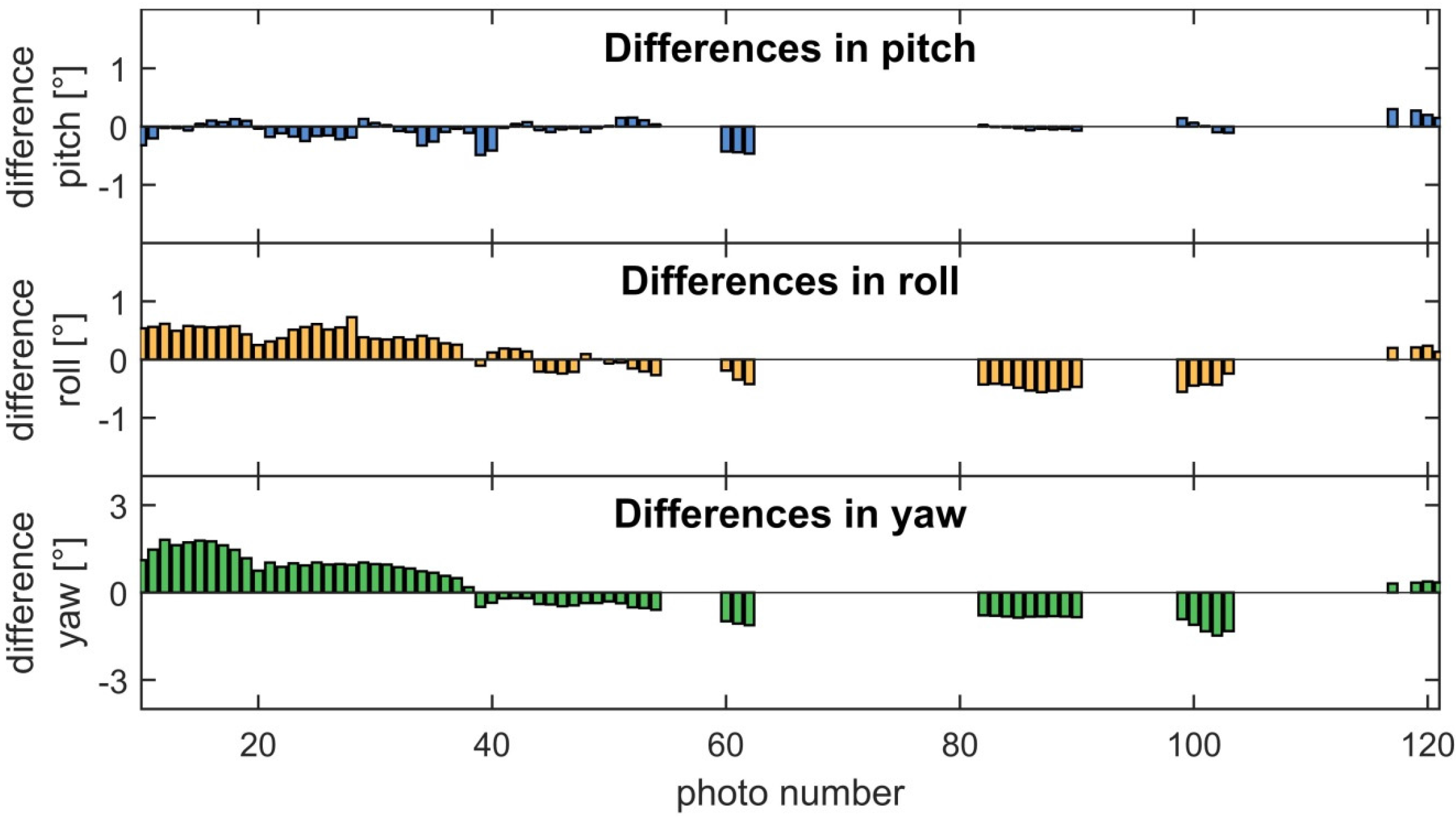
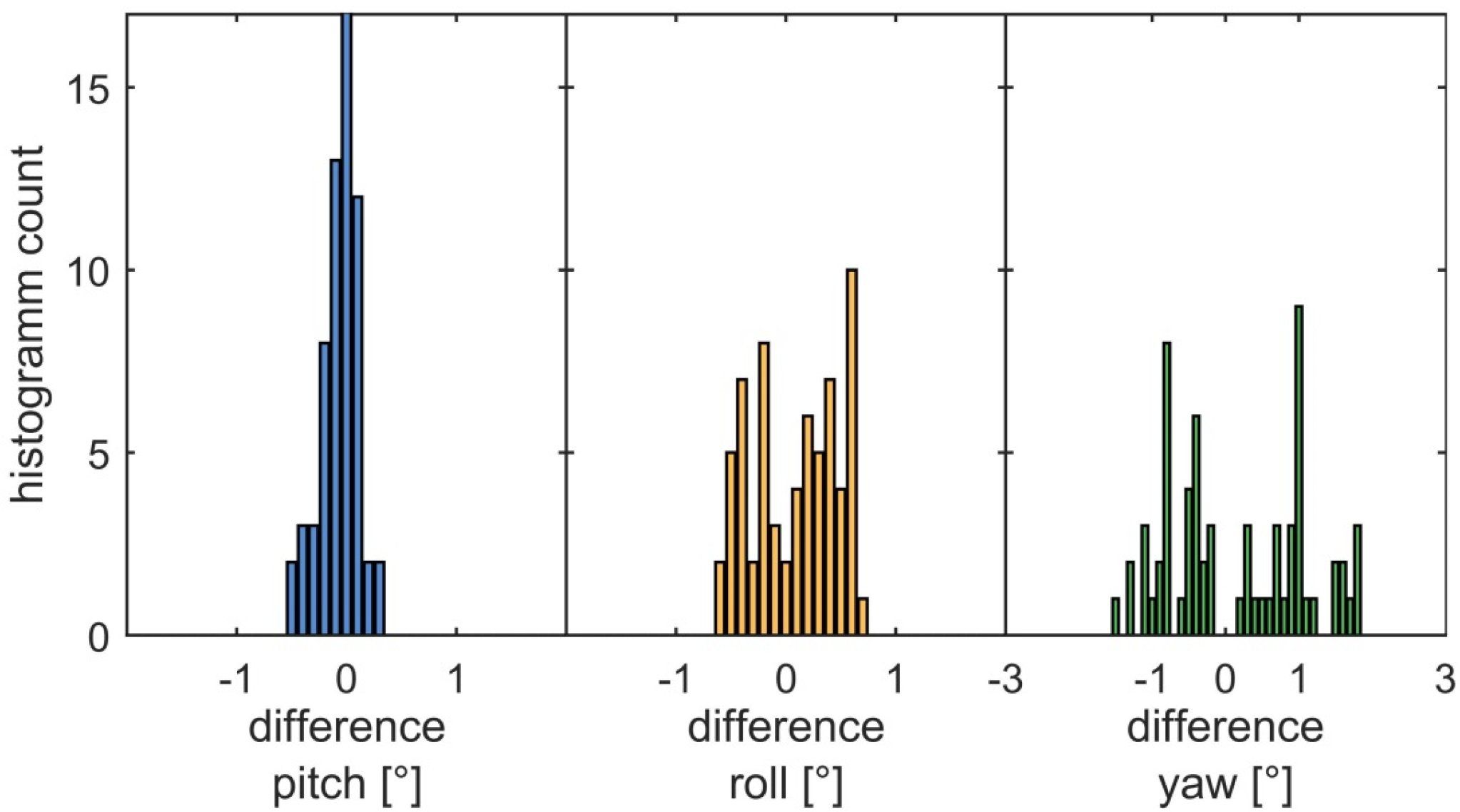
The accuracy and usability of the device was tested within three test flights over pre-defined areas with ground-control targets. First, the exterior orientation values acquired by SfM and the GPS/INS were directly compared and statistically analyzed. The accuracy of the derived angles turned out to be better than 1° for roll and pitch (mean between 0.0 and 0.21 with a standard deviation of 0.17–0.48) and better than 2.5° for yaw angles (mean between 0.0 and −0.14 with a standard deviation of 0.58–0.94). In a second validation step, the locations of the images’ footprint corners were compared to their expected locations derived from an external orthophotograph. In all cases, the deviation was less than 10% of the respective image side length. This seems to be sufficient to enable a fast and almost automatic GIS-based archiving of all of the imagery.
Next to the fact that the presented device enables automated GIS-based archiving of oblique aerial photographs, the derived exterior orientation information can be used in speeding up the orthophoto and DSM creation in a computer vision-based workflow. Although this paper focuses on an archaeological application of the device, the proposed solution can be of interest for all other sciences and applications that are in need of a quick way to directly geolocate aerial and terrestrial photographs.


 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}