1. Introduction
Full polarimetric SAR data are capable of identifying radar scattering mechanisms on the ground, and they have been used to estimate land cover class by connecting the radar backscattering mechanism to the land cover condition both by day and by night in all weather conditions. Such characteristics make these data applicable to the detection of a disaster area, especially for emergency observations made soon after a disaster happens. Watanabe
et al. [
1] used Japanese L-band satellite SAR (PALSAR; Phased Array type L-band Synthetic Aperture Radar) full polarimetric data to detect landslide areas induced by the Iwate-Miyagi Nairuku earthquake of 2008, using the surface scattering component of a three-component decomposition model. Furthermore, σ°
HV has also been used to distinguish landslide areas with rough surfaces from other surface scattering areas, such as pastures and vacant pieces of land with smooth surfaces.
Polarimetric decomposition analysis was conducted on the data before and after a landslide event with ALOS PALSAR data [
2]. For the detection of landslides areas, 30-m resolution full polarimetric data using unsupervised classification based on the Entropy
-α plane are more useful than 10-m resolution single-polarization data. Czuchlewski
et al. [
3] use L-band airborne SAR polarimetry data, and identify the extent of the landslide, using scattering entropy, anisotropy, and pedestal height. They also pointed out that one post-event single polarized SAR image is insufficient for distinguishing and mapping landslides. Rodriguez
et al. [
4] use L-band airborne SAR polarimetry data, and show the landslide scar areas are dominated by single-bounce scattering and the surrounding forested regions are dominated by volume scattering. Radar vegetation index, pedestal height, and entropy are used to identify forest, to separate the landslide area. Shimada
et al. [
5] used Japanese L-band airborne SAR (Pi-SAR-L2; Polarimetric and Interferometric Airborne Synthetic Aperture Radar L2) data to show that the change of land cover from forest before a disaster to bare soil after a disaster was detected well by the polarimetric coherence between HH and VV (γ
(HH)-(VV)). Shibayama
et al. [
6] confirm the usefulness of γ
(HH)-(VV) for detecting a landslide. They also pointed out that in landslide areas, the polarimetric indices of normalized surface scattering power (
ps), normalized volume scattering power (
pv)
, and γ
(HH)-(VV) change drastically with the local incidence angle, whereas in forested areas, these indices are stable, regardless of the change in the local incidence angle. Several full polarimetric parameters have been suggested to detect a landslide area since now. In this study, airborne full polarimetric L-band SAR data, obtained both before and after a landslide event, were used to determine the most appropriate full polarimetric parameters and observation direction for identifying an area affected by a landslide induced by heavy rain. The data used in our analysis are unique for two reasons:
- (1)
hey comprise full polarimetric data observed just after the disaster (landslide).
- (2)
They were observed from four different observational directions at the same time after the disaster. One of the directions was also observed before the disaster.
To generalize our method, simple radar scattering models from rough surface were applied, as discussed in
Section 4. The models were evaluated for two sites using three different local incident angles with two polarizations, simultaneously, which has rarely been undertaken for a landslide area.
2. Pi-SAR-L2 Data and Field Experiment
On 16 October 2013, Typhoon Wipha struck Izu Oshima Island, which is located 100 km south of Tokyo (
Figure 1), generating a rainfall rate that was recorded at 122.5 mm/h. This heavy rain induced a large-scale landslide that affected an area of 1.14 million m
2 and led to 39 people being killed or missing. The Geospatial Information Authority of Japan (GSI) used aerial photographs taken after the disaster to produce a landslide map [
7], and the main landslide areas are identified in
Figure 2. The locations of many landslides can be observed in the mountain area, and some material displaced by the landslides intruded into residential areas. These data were used as the validation data.
The study area was observed before and after the disaster using Japanese airborne SAR (Pi-SAR-L and Pi-SAR-L2) (
Table 1). The Pi-SAR-L2 observations were acquired in four different observational directions (L203201–L203204,
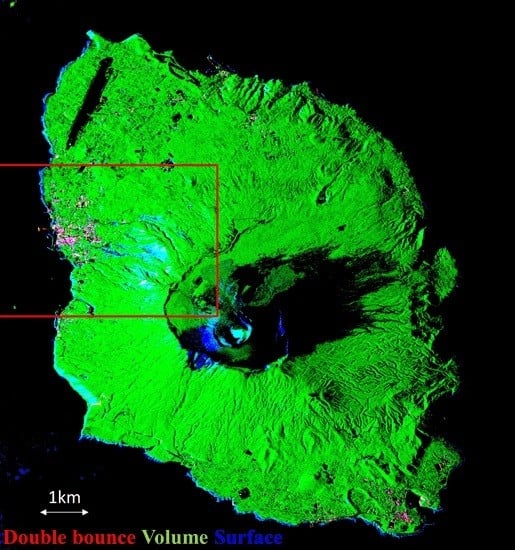
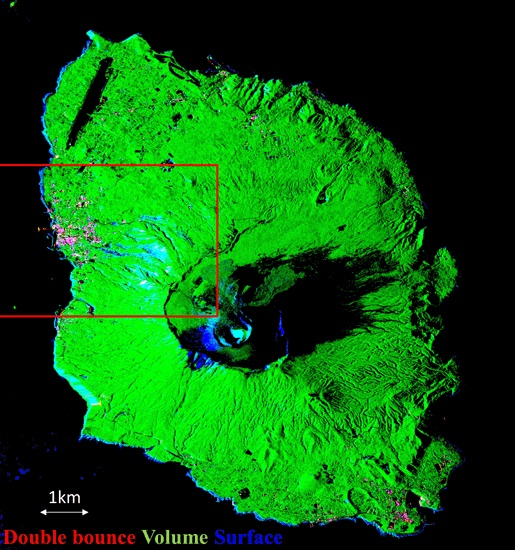
Figure 1) six days after the disaster. The time required for the four flights was about one hour. Before the disaster, one Pi-SAR-L observation (L03801) had been made on 30 August 2000, in the same observational direction as L203201. Three of the four data (L203201, L203202, and L203203) were used to determine the parameters and directions most appropriate for detecting landslide areas. L203204 was not used, because its configuration (incident and azimuth angles to the landslide area) is almost same as L203202 data. These parameters for detecting landslide areas included backscattering coefficient (σ°), polarimetric coherence (γ), eigenvalue decomposition [
8], and four-component decomposition parameters [
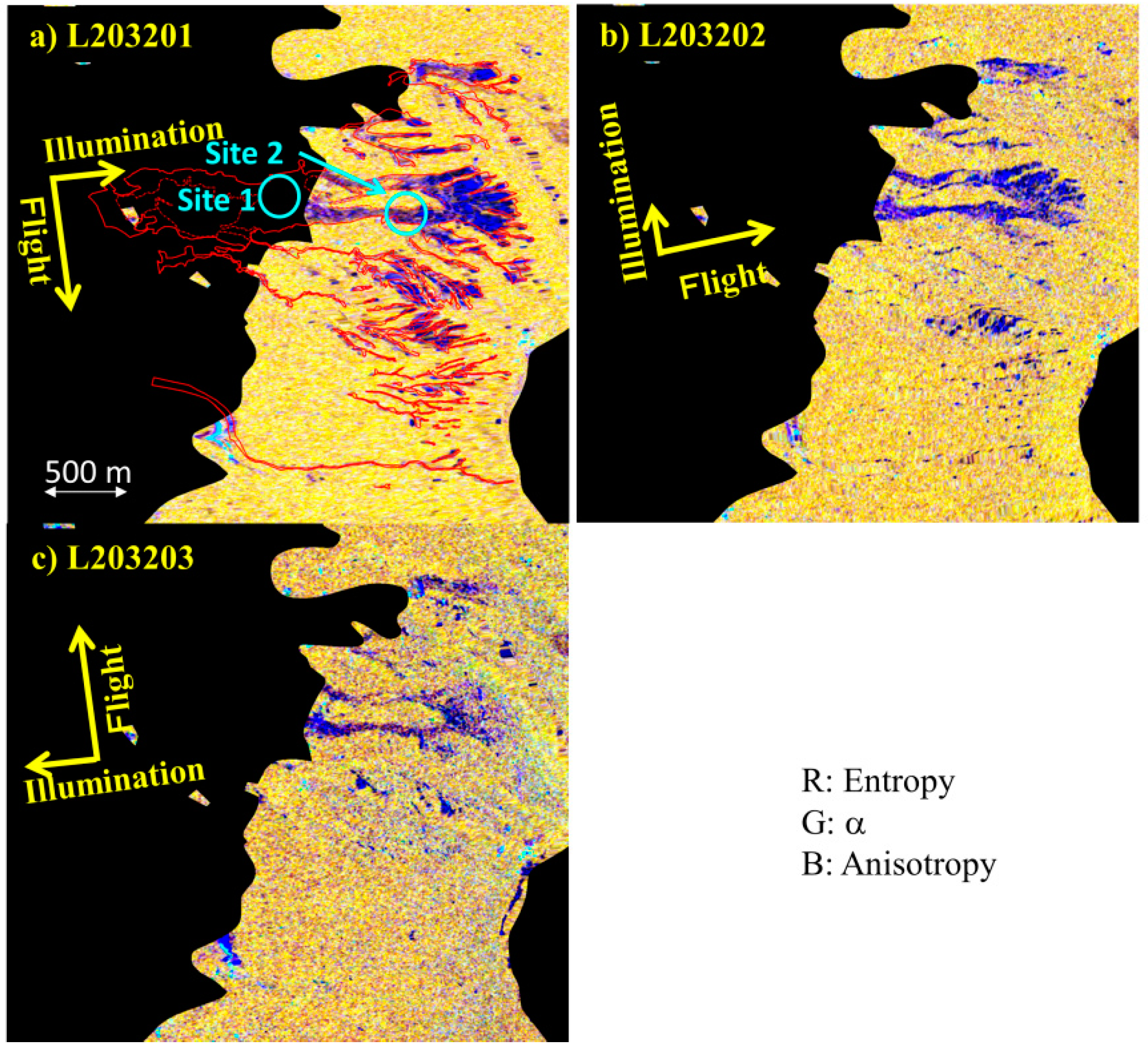
9]. The γ is calculated from the correlation between two polarimetric states (HH-HV-VV base, (HH+VV)-(HH-VV)-(HV) base). The eigenvalue decomposition parameters consist of entropy/α/anisotropy, and they were obtained using PolSARPro [
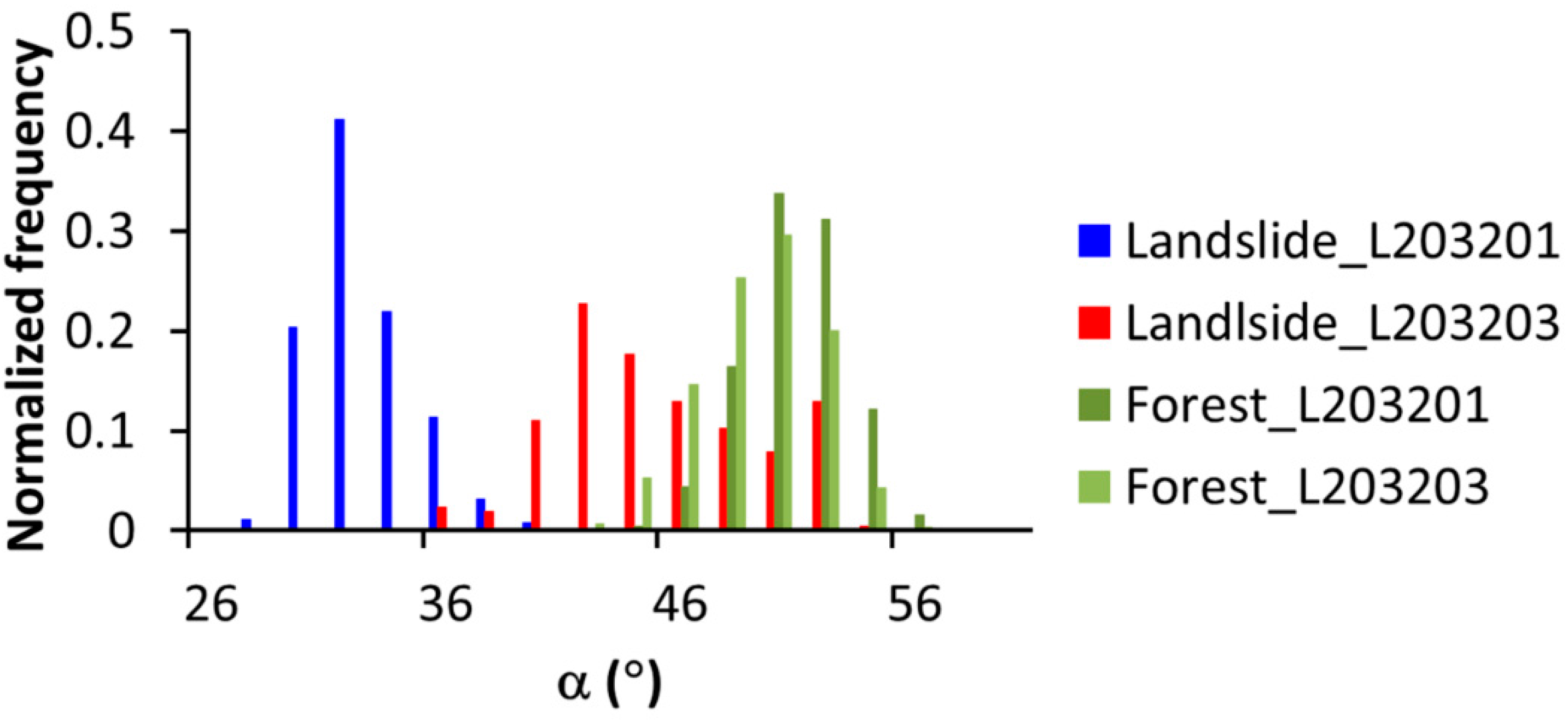
10]. Entropy represents the randomness of a scatterer, α represents the scattering mechanism (0° for surface scattering, 45° for dipole scattering or single scattering by a cloud of anisotropic particles, and 90° for double-bounce scattering), and anisotropy represents the relative importance of the second and the third eigenvalues. The four-component decomposition parameters (double-bounce/volume/surface/helix scattering) are related to surface, volume, double-bounce, and helix scattering components on the earth’s surface, and they were obtained using a program of our own making. The processing window size for calculating the parameters was 7 × 7 pixels.
A forest area map, obtained from the national land numerical information download service managed by GSI (
Figure 2), was used to identify the forest area before the disaster [
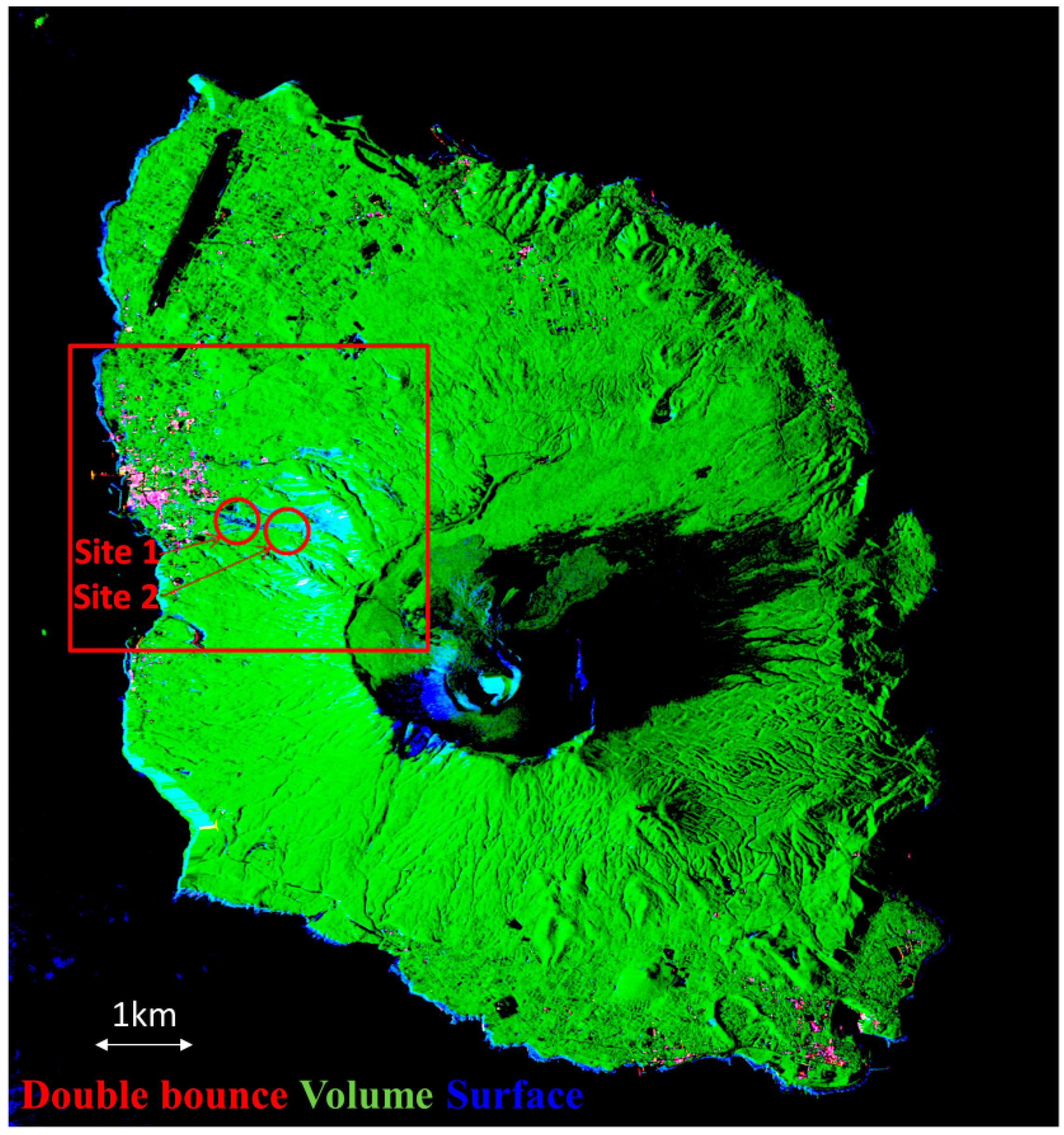
11]. Field experiments were performed on 23 and 24 March 2015. The value of σ° obtained from bare soil is determined from the surface roughness, dielectric constant of the soil (equivalent to the volumetric soil moisture, Mv), and local incident angle. The parameter Mv was not measured in the field experiments because its value was different from that when the Pi-SAR-L2 observation was performed. However, surface roughness does not change much, if there is no disturbance. It was measured using a needle profiler at two sites (Sites 1 and 2,
Figure 2) within the landslide area to evaluate the radar backscattering from bare soil (
Figure 3). The red points shown in the photos were used to evaluate the surface roughness (s) and correlation length (l) normalized by wave number k (e.g., ks and kl). Site 1 was a slightly rough surface covered by soil with a slope of 5°, for which ks and kl were evaluated as 0.38 and 6.17, respectively. Site 2 was a rough surface covered by soil and volcanic rocks with a slope of 20°, for which the values of ks and kl were determined as 1.85 and 5.03, respectively.
There are three well known and simple surface scattering models. The first of these is the small perturbation model (SPM) [
12], which is valid for smooth surfaces (
ks < 0.3). The second, the physical optics model (POM) [
13], is valid for slightly rough surfaces within the parameter ranges Mv < 0.25,
l2 > 2.76·
sλ, and
kl > 6. The third, the geometric optics model (GOM) [
13], is valid for rough surfaces and predicts that
σ°
HH = σ°
VV at all incidence angles; this model is valid within the parameter ranges
kl > 6,
l2 > 2.76·sλ, and
ks·cosθ > 1.5. The POM [
13] is valid for Site 1, and is described by:
In these equations, Γ(θ,ε) represents the Fresnel reflection coefficient, p represents the polarization (h or v), pp represents any combination of h and v, such as hh, hv, vh, vv, l is the correlation length, θ is the local incident angle, and ε is the relative dielectric constant, which is related to the soil moisture. The GOM [
13] is almost valid for Site 2, and described by:
where m is the surface slope and represented by
.
These models and parameters obtained in the field experiment were used to evaluate the observed σ° in
Section 4.
4. Discussion
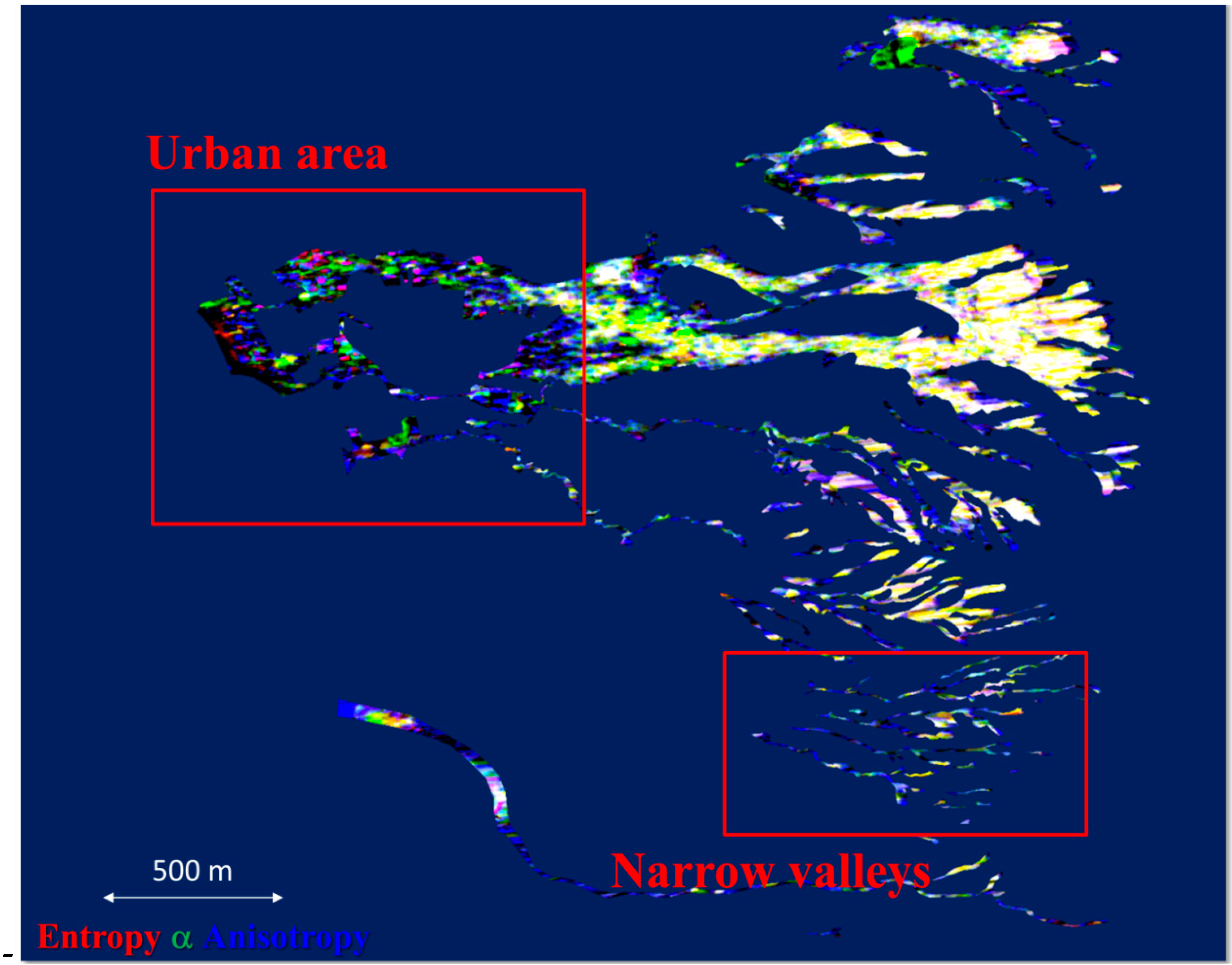
The accuracy of detection of the landslide area was improved when the forest area was picked up. The landslide area is picked up and shows the difference of entropy/α/anisotropy only before and after the disaster in
Figure 8. Maximum and minimum values for each parameter are assigned to values of 0 and 255 in the RGB scale. Yellow areas seen in the upper right of
Figure 8 indicate the significant change in entropy and α before and after the disaster. To a large extent, this area changed from forest to bare soil after the landslide. However, significant parameter change is not observed in the upper-left area of
Figure 8. This is the residential area, which changed from a normal residential area before the disaster to a residential area with mud induced by the landslide after the disaster. No significant change could be detected by the full polarimetric parameters in this area. There are other areas without significant parameter change, such as in the lower right of
Figure 8. Here, there are many narrow valleys and layover/shadowing might prevent any significant change in the full polarimetric parameters in this region. An outline of the detection accuracy by using Δγ
HH-VV and Δα is presented in
Figure 9. The misidentification of the residential area and the narrow valleys result in a low producer’s accuracy of 33.8%–35.8%. On the other hand, the higher user’s accuracy of 58.7%–60.9% is due to the detection of the change from forested area to landslide area.
γ
(HH+VV)-(HH−VV) for the landslide area is lower than γ
(HH)-(VV) (
Table 3). Very little double-bounce scattering, indicated by HH−VV component, is expected from the landslide area, and this led to the smaller γ
(HH+VV)-(HH−VV). Since a smaller γ
(HH+VV)-(HH−VV) indicates a smaller Δγ
(HH+VV)-(HH−VV) between the landslide and forested area, detection accuracy for the γ
(HH+VV)-(HH−VV) parameter is lower than that for the γ
(HH)-(VV) parameter. The γ
(HH+VV)-(HH−VV) parameter highlights changes at the top of Mt. Mihara (
Figure 5b). Small changes in vegetation and soil moisture are expected between the August and October observations; γ
(HH+VV)-(HH−VV) may be sensitive to such changes, unlike γ
(HH)-(VV) and α.
The accuracy is almost the same when using α and γ(HH)-(VV) after the disaster, and using the difference between α and γ(HH)-(VV) before and after the disaster. This indicates that α and γ(HH)-(VV) are good parameters to distinguish forest and bare soil areas. This is also supported by the accuracy improvement after the forest area is identified. The α and γ(HH)-(VV) obtained before the disaster are essential for distinguishing between areas of bare soil before the disaster and landslides induced by the disaster, and between bare soil and forest.
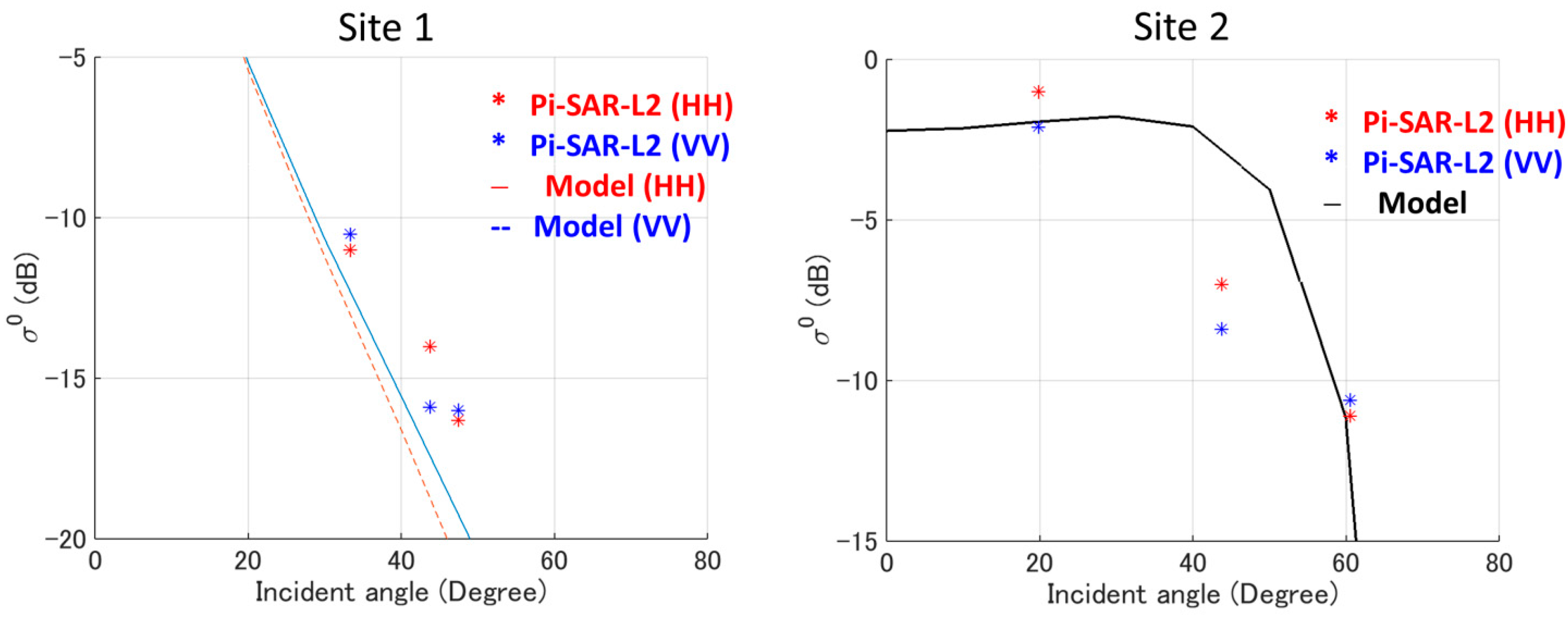
The values of σ° obtained from Pi-SAR-L2 and estimated from theoretical models are plotted against the local incident angle in
Figure 10. The L203201, L203202, and L203203 observations correspond to the minimum, median, and maximum local incident angle plots in the figure. Pi-SAR-L2 observations were performed six days after the disaster, and the value of Mv is assumed as 100% for Site 1. The values of σ° obtained from Pi-SAR-L2 show the same pattern against the local incident angle, but with an offset of a few dB from the POM. If the value of ks was not 0.38 (measured on site), it was assumed as 0.5, and the model describes the data obtained from the three different local incident angles well. There was a 1.5-year interval between the Pi-SAR-L2 observations and surface roughness measurements and, thus, changes of 30% in the smoothness of the surface during that period could account for the difference of a few dB in the σ° values. The GOM works well for Site 2 if
Mv = 25% is assumed, except for the L203202 data. The dielectric constant of volcanic rock, which partly covers the surface of Site 2, is generally 5–10, and this corresponds to an Mv of 8%–18.8%. The assumption of
Mv = 25% could be explained by the mixture of the rock and soil. At Site 2, a few larger rocks could not be characterized by the surface roughness measurements and the shadowing of these rocks might unexpectedly have affected the values of σ° for the L203202 observations. However, the values of σ° observed for the landslide areas are represented moderately by the simple surface scattering models.
5. Conclusions
Pi-SAR-L2 full polarimetric data observed in four different observational directions over a landslide area were analyzed to clarify the most appropriate L-band full polarimetric parameters and observational direction to detect a landslide area. Data from one Pi-SAR-L observation performed before the disaster occurred were also used in this analysis. A summary of the preferable parameters to detect the landslide area was added in
Table 5.
When the data before and after the disaster were used, the Δα and ΔγHH-VV showed user’s accuracies of about 58.7%–60.9% and producer’s accuracies of 33.8%–35.8%, indicating better performance than the other parameters, such as the four-component decomposition parameters (Δσ°Double, Δσ°Volume, Δσ°Surface, and Δσ°Helix), Δσ°, Δγ(HH+VV)-(HH−VV), Δentropy, and Δanisotropy.
Other two knowledge obtained from our analysis are:
- ✓
The detection accuracy is almost the same when using the parameters after the disaster, and using the difference between the parameters before and after the disaster.
- ✓
Producer’s accuracies are improved, and the accuracy changes from 35.8% to 52.2% for the α parameter (improved by 16.4%), and from 33.8% to 49.5% for the γ(HH)-(VV) parameters (improved by 15.7%), when evaluated by the α and γ(HH)-(VV) parameters, if the forested area before the disaster is identified.
However, the land cover change from the residential area before the disaster to the residential area with mud induced by the landslide after the disaster could not be detected by the full polarimetric parameters.
The landslide area was clearly identifiable using data observed from the bottom of the landslide to the top. The clarity was degraded when using data observed from the top of the landslide to the bottom, indicating that smaller local incident angle is better to distinguish landslide and forested area. The observed σ° for the landslide areas was moderately represented using two simple models: the POM for slightly rough surfaces, and the GOM for rough surfaces.
The α and γHH-VV obtained from full polarimetric L-band SAR data are capable of identifying landslides, which is especially useful for emergency observations taken just after a disaster occurs; however, the parameters only detect the change from forest cover to bare soil. None of the representative full polarimetric parameters showed any significant differences between the landslide-affected urban areas after the disaster and unaffected areas before the disaster. The α and γ(HH)-(VV) obtained before the disaster are essential for distinguishing between areas of bare soil before the disaster and landslides induced by the disaster.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}