Multiday EMG-Based Classification of Hand Motions with Deep Learning Techniques

 , ,
, ,  , ,
, ,
Abstract
:1. Introduction
1.1. Deep Learning for Myoelectric Control
1.2. Contribution
2. Materials and Methods
2.1. Subjects
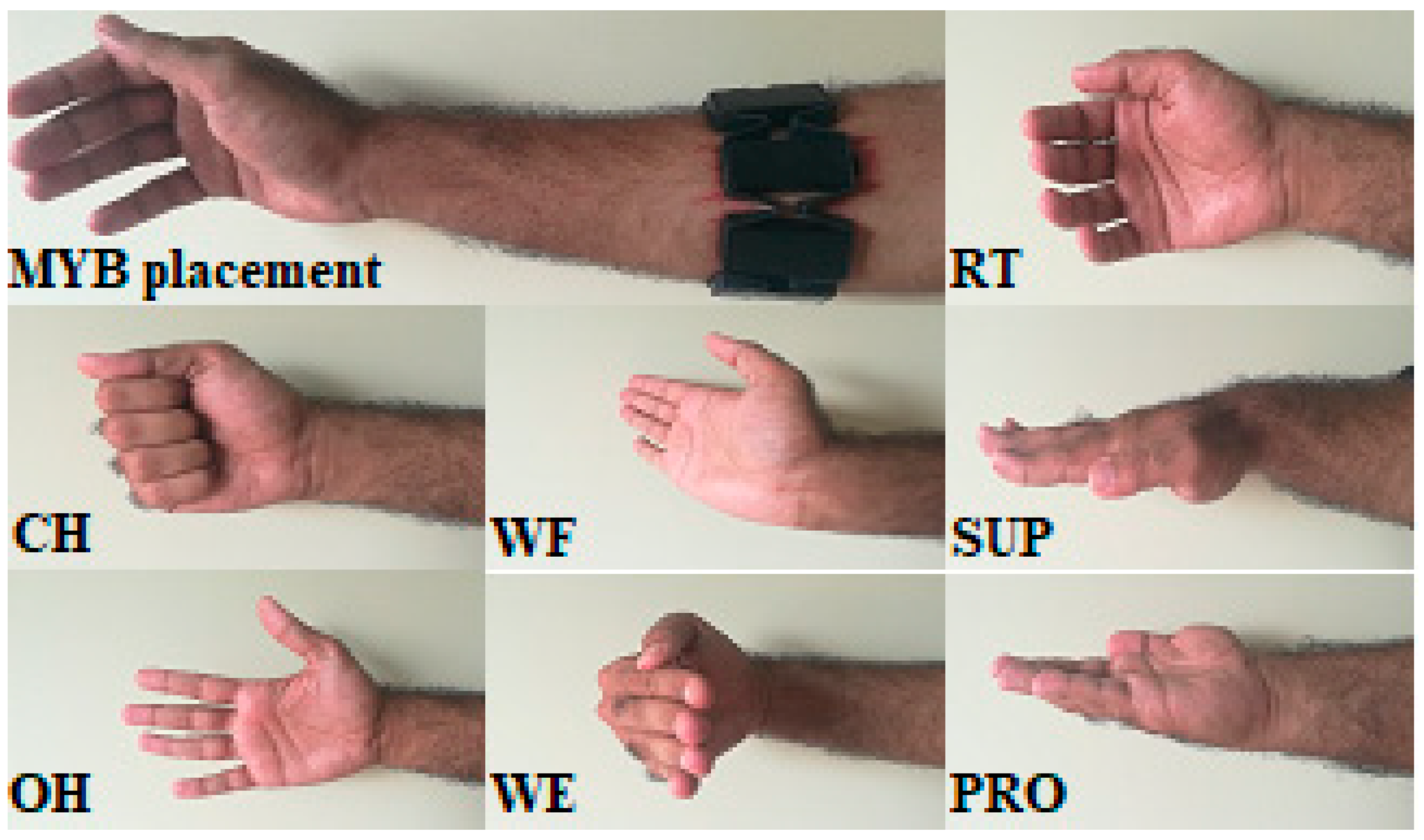
2.2. Wearable EMG Sensors
2.3. Experimental Procedure
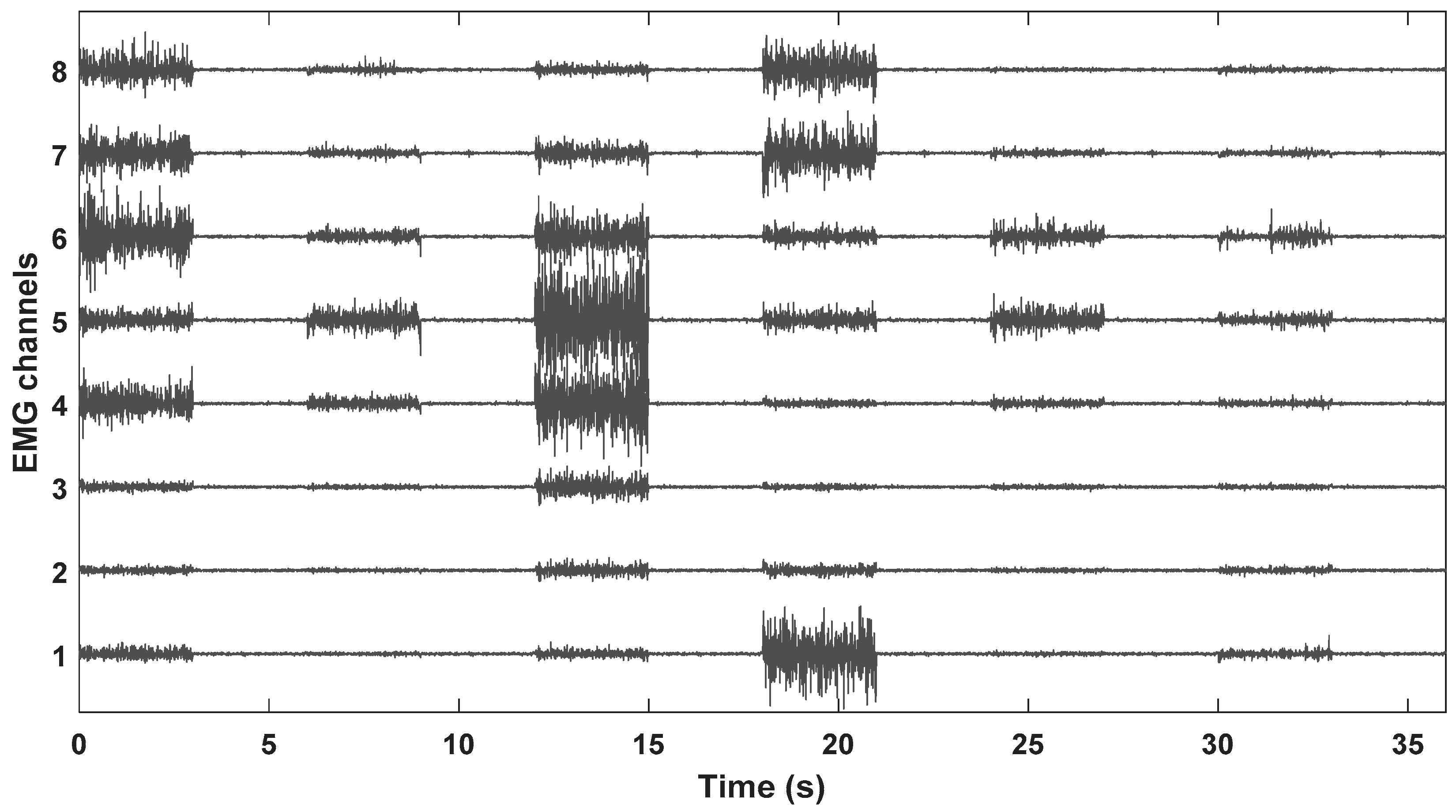
2.4. Signal Processing
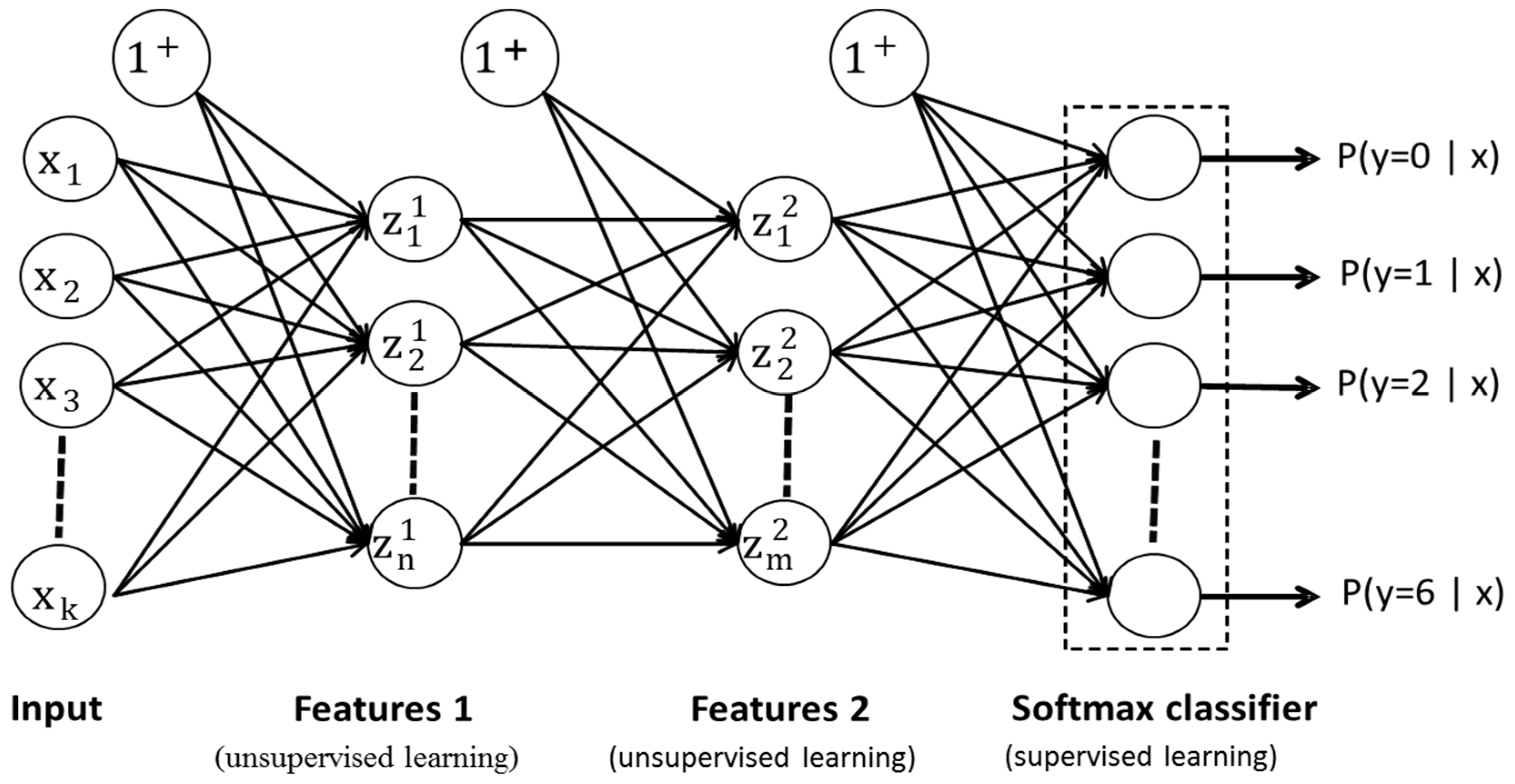
2.5. Autoencoders
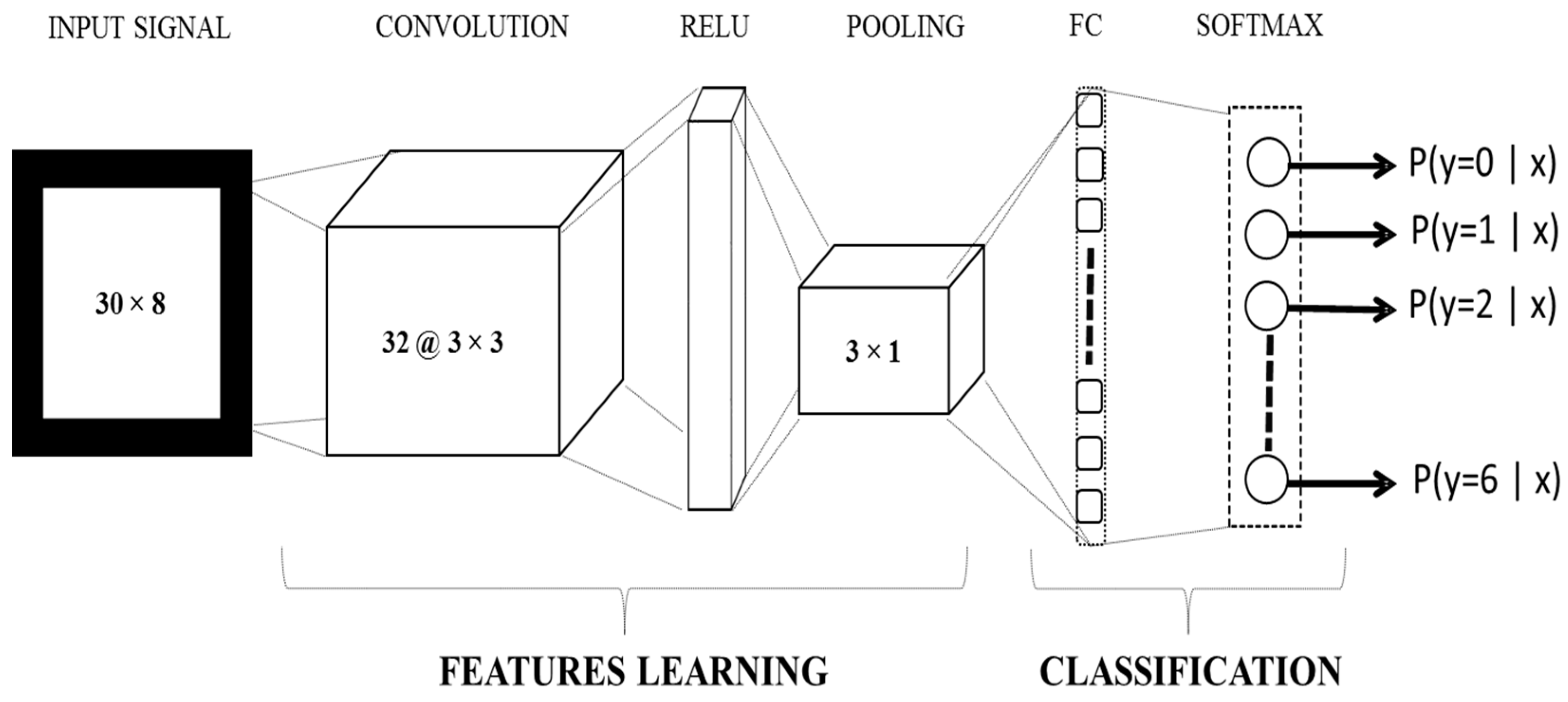
2.6. Convolutional Neural Networks
2.7. Statistical Tests
3. Results
3.1. Within-Session Analysis
3.2. Between-Sessions Analysis
3.3. Analysis Between Pairs of Days
3.4. Leave-One-Out between Days (15-Fold Cross-Validation)
3.5. Performance of Individual Subjects
3.6. Computational Time
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Scott, R. Myoelectric control of prostheses: A brief history. In Proceedings of the 1992 MyoElectric Controls/Powered Prosthetics Symposium, Fredericton, NB, Canada, 1 August 1992. [Google Scholar]
- Smith, L.H.; Hargrove, L.J. Comparison of surface and intramuscular emg pattern recognition for simultaneous wrist/hand motion classification. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 4223–4226. [Google Scholar]
- Geethanjali, P. Myoelectric control of prosthetic hands: State-of-the-art review. Med. Devices (Auckland NZ) 2016, 9, 247. [Google Scholar] [CrossRef] [PubMed]
- Hahne, J.M.; Markovic, M.; Farina, D. User adaptation in myoelectric man-machine interfaces. Sci. Rep. 2017, 7, 4437. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, N.V.; Subramaniam, K. A review on upper-limb myoelectric prosthetic control. IETE J. Res. 2017, 1–13. [Google Scholar] [CrossRef]
- Scheme, E.; Englehart, K. Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use. J. Rehabilit. Res. Dev. 2011, 48, 643–659. [Google Scholar] [CrossRef]
- Li, G.; Schultz, A.E.; Kuiken, T.A. Quantifying pattern recognition—Based myoelectric control of multifunctional transradial prostheses. IEEE Trans. Neural Syst. Rehabilit. Eng. 2010, 18, 185. [Google Scholar]
- Kamavuako, E.N.; Scheme, E.J.; Englehart, K.B. Combined surface and intramuscular emg for improved real-time myoelectric control performance. Biomed. Signal Process. Control 2014, 10, 102–107. [Google Scholar] [CrossRef]
- Purushothaman, G.; Ray, K. Emg based man–machine interaction—A pattern recognition research platform. Robot. Auton. Syst. 2014, 62, 864–870. [Google Scholar] [CrossRef]
- Ortiz-Catalan, M. Cardinality as a highly descriptive feature in myoelectric pattern recognition for decoding motor volition. Front. Neurosci. 2015, 9, 416. [Google Scholar] [CrossRef] [PubMed]
- Hudgins, B.; Parker, P.; Scott, R.N. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef] [PubMed]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Phinyomark, A.; Limsakul, C.; Phukpattaranont, P. A novel feature extraction for robust EMG pattern recognition. arXiv, 2009; arXiv:0912.3973. [Google Scholar]
- Adewuyi, A.A.; Hargrove, L.J.; Kuiken, T.A. Evaluating EMG feature and classifier selection for application to partial-hand prosthesis control. Front. Neurorobot. 2016, 10, 15. [Google Scholar] [CrossRef] [PubMed]
- Zhai, X.; Jelfs, B.; Chan, R.H.; Tin, C. Self-recalibrating surface EMG pattern recognition for neuroprosthesis control based on convolutional neural network. Front. Neurosci. 2017, 11, 379. [Google Scholar] [CrossRef] [PubMed]
- Phinyomark, A.; Quaine, F.; Charbonnier, S.; Serviere, C.; Tarpin-Bernard, F.; Laurillau, Y. EMG feature evaluation for improving myoelectric pattern recognition robustness. Expert Syst. Appl. 2013, 40, 4832–4840. [Google Scholar] [CrossRef]
- Phinyomark, A.; Khushaba, R.N.; Ibáñez-Marcelo, E.; Patania, A.; Scheme, E.; Petri, G. Navigating features: A topologically informed chart of electromyographic features space. J. R. Soc. Interface 2017, 14, 20170734. [Google Scholar] [CrossRef] [PubMed]
- Tkach, D.; Huang, H.; Kuiken, T.A. Study of stability of time-domain features for electromyographic pattern recognition. J. Neuroeng. Rehabilit. 2010, 7, 21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Côté-Allard, U.; Fall, C.L.; Campeau-Lecours, A.; Gosselin, C.; Laviolette, F.; Gosselin, B. Transfer learning for sEMG hand gestures recognition using convolutional neural networks. In Proceedings of the International Conference on Systems, Man and Cybernetics, Banff Center, Banff, AB, Canada, 5–8 October 2017. [Google Scholar]
- Xia, P.; Hu, J.; Peng, Y. EMG-based estimation of limb movement using deep learning with recurrent convolutional neural networks. Artif. Organs 2017, 42, 67–77. [Google Scholar] [CrossRef] [PubMed]
- Atzori, M.; Cognolato, M.; Müller, H. Deep learning with convolutional neural networks applied to electromyography data: A resource for the classification of movements for prosthetic hands. Front. Neurorobot. 2016, 10. [Google Scholar] [CrossRef] [PubMed]
- Chan, A.D.; Green, G.C. Myoelectric control development toolbox. In Proceedings of the 30th Conference Canadian Medical and Biological Engineering Society, Toronto, ON, Canada, 16–19 June 2007. [Google Scholar]
- Oskoei, M.A.; Hu, H. Support vector machine-based classification scheme for myoelectric control applied to upper limb. IEEE Trans. Biomed. Eng. 2008, 55, 1956–1965. [Google Scholar] [CrossRef] [PubMed]
- Sebelius, F.C.; Rosen, B.N.; Lundborg, G.N. Refined myoelectric control in below-elbow amputees using artificial neural networks and a data glove. J. Hand Surg. 2005, 30, 780–789. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Zhang, X.; Zhao, Z.-Y.; Yang, J.-H.; Lantz, V.; Wang, K.-Q. Hand gesture recognition research based on surface EMG sensors and 2D-accelerometers. In Proceedings of the 2007 11th IEEE International Symposium on Wearable Computers, Boston, MA, USA, 11–13 October 2007; pp. 11–14. [Google Scholar]
- Wolczowski, A.; Kurzynski, M. Control of dexterous hand via recognition of EMG signals using combination of decision-tree and sequential classifier. Comput. Recognit. Syst. 2007, 2, 687–694. [Google Scholar]
- Kim, J.; Mastnik, S.; André, E. Emg-based hand gesture recognition for realtime biosignal interfacing. In Proceedings of the 13th International Conference on Intelligent User Interfaces, Gran Canaria, Spain, 13–16 January 2008; ACM: New York, NY, USA; pp. 30–39. [Google Scholar]
- Atzori, M.; Gijsberts, A.; Castellini, C.; Caputo, B.; Hager, A.-G.M.; Elsig, S.; Giatsidis, G.; Bassetto, F.; Müller, H. Electromyography data for non-invasive naturally-controlled robotic hand prostheses. Sci. Data 2014, 1, 140053. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, N.; Han, J.; Zhang, D.; Wen, S.; Liu, T. Predicting eye fixations using convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 362–370. [Google Scholar]
- Collobert, R.; Weston, J. A unified architecture for natural language processing: Deep neural networks with multitask learning. In Proceedings of the 25th International Conference on Machine Learning, Helsinki, Finland, 5–9 July 2008; ACM: New York, NY, USA; pp. 160–167. [Google Scholar]
- Chorowski, J.K.; Bahdanau, D.; Serdyuk, D.; Cho, K.; Bengio, Y. Attention-based models for speech recognition. In Proceedings of the 29th Annual Conference on Neural Information Processing Systems 2015, Montreal, QC, Canada, 7–12 December 2015; pp. 577–585. [Google Scholar]
- Min, S.; Lee, B.; Yoon, S. Deep learning in bioinformatics. Brief. Bioinform. 2017, 18, 851–869. [Google Scholar] [CrossRef] [PubMed]
- Nurse, E.; Mashford, B.S.; Yepes, A.J.; Kiral-Kornek, I.; Harrer, S.; Freestone, D.R. Decoding EEG and LFP signals using deep learning: Heading TrueNorth. In Proceedings of the ACM International Conference on Computing Frontiers, Como, Italy, 16–18 May 2016; pp. 259–266. [Google Scholar]
- Acharya, U.R.; Fujita, H.; Oh, S.L.; Hagiwara, Y.; Tan, J.H.; Adam, M. Application of deep convolutional neural network for automated detection of myocardial infarction using ECG signals. Inf. Sci. 2017, 415, 190–198. [Google Scholar] [CrossRef]
- Narejo, S.; Pasero, E.; Kulsoom, F. EEG based eye state classification using deep belief network and stacked autoencoder. Int. J. Electr. Comput. Eng. 2016, 6, 3131. [Google Scholar] [CrossRef]
- Atzori, M.; Gijsberts, A.; Heynen, S.; Hager, A.-G.M.; Deriaz, O.; Van Der Smagt, P.; Castellini, C.; Caputo, B.; Müller, H. Building the ninapro database: A resource for the biorobotics community. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 1258–1265. [Google Scholar]
- Geng, W.; Du, Y.; Jin, W.; Wei, W.; Hu, Y.; Li, J. Gesture recognition by instantaneous surface EMG images. Sci. Rep. 2016, 6, 36571. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Park, K.-H.; Lee, S.-W. Movement intention decoding based on deep learning for multiuser myoelectric interfaces. In Proceedings of the 2016 4th International Winter Conference on Brain-Computer Interface (BCI), Jeongseon, Korea, 22–24 February 2016; pp. 1–2. [Google Scholar]
- Cun, L.; Jackel, L.; Bottou, L.; Brunot, A.; Cortes, C.; Denker, J.; Drucker, H.; Guyon, I.; Muller, U.; Sackinger, E. Comparison of learning algorithms for handwritten digit recognition. In Proceedings of the 1st International Conference on Artificial Neural Networks, Sofia, Bulgaria, 27 November–1 December 1995; pp. 53–60. [Google Scholar]
- Du, Y.; Jin, W.; Wei, W.; Hu, Y.; Geng, W. Surface EMG-based inter-session gesture recognition enhanced by deep domain adaptation. Sensors 2017, 17, 458. [Google Scholar] [CrossRef] [PubMed]
- Du, Y.; Wong, Y.; Jin, W.; Wei, W.; Hu, Y.; Kankanhalli, M.; Geng, W. Semi-supervised learning for surface EMG-based gesture recognition. In Proceedings of the International Joint Conference on Artificial Intelligence, Melbourne, Australia, 19–25 August 2017. [Google Scholar]
- Wei, W.; Wong, Y.; Du, Y.; Hu, Y.; Kankanhalli, M.; Geng, W. A multi-stream convolutional neural network for sEMG-based gesture recognition in muscle-computer interface. Pattern Recognit. Lett. 2017. [Google Scholar] [CrossRef]
- Biron, K.; Englehart, K. EMG pattern recognition adaptation. In Proceedings of the 18th Congress of the International Society of Electrophysiology and Kinesiology, Aalborg, Denmark, 16–19 June 2010. [Google Scholar]
- Jiang, N.; Dosen, S.; Muller, K.-R.; Farina, D. Myoelectric control of artificial limbs—Is there a need to change focus? [in the spotlight]. IEEE Signal Process. Mag. 2012, 29, 150–152. [Google Scholar] [CrossRef]
- He, J.; Zhang, D.; Jiang, N.; Sheng, X.; Farina, D.; Zhu, X. User adaptation in long-term, open-loop myoelectric training: Implications for EMG pattern recognition in prosthesis control. J. Neural Eng. 2015, 12, 046005. [Google Scholar] [CrossRef] [PubMed]
- Zia ur Rehman, M.; Gilani, S.; Waris, A.; Niazi, I.; Slabaugh, G.; Farina, D.; Kamavuako, E. Stacked sparse autoencoders for EMG-based classification of hand motions: A comparative multi day analyses between surface and intramuscular EMG. Appl. Sci. 2018, 8, 1126. [Google Scholar] [CrossRef]
- Waris, A.; ur Rehman, M.Z.; Kamavuako, E.N. Variability of hand motions quantified using EMG root mean square and mean frequency. In Proceedings of the International Society of Electrophysiology and Kinesiology, Dublin, Ireland, 30 June–2 July 2018. [Google Scholar]
- Huang, Q.; Yang, D.; Jiang, L.; Zhang, H.; Liu, H.; Kotani, K. A novel unsupervised adaptive learning method for long-term electromyography (EMG) pattern recognition. Sensors 2017, 17, 1370. [Google Scholar] [CrossRef] [PubMed]
- Day, S. Important Factors in Surface EMG Measurement; Bortec. Biomed. Ltd. Publisher: Calgary, AB, Canada, 2002; pp. 1–17. [Google Scholar]
- Lee, S.; Kruse, J. Biopotential electrode sensors in ECG/EEG/EMG systems. Analog Devices 2008, 200, 1–2. [Google Scholar]
- Mendez, I.; Hansen, B.W.; Grabow, C.M.; Smedegaard, E.J.L.; Skogberg, N.B.; Uth, X.J.; Bruhn, A.; Geng, B.; Kamavuako, E.N. Evaluation of the myo armband for the classification of hand motions. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1211–1214. [Google Scholar]
- Pizzolato, S.; Tagliapietra, L.; Cognolato, M.; Reggiani, M.; Müller, H.; Atzori, M. Comparison of six electromyography acquisition setups on hand movement classification tasks. PLoS ONE 2017, 12, e0186132. [Google Scholar] [CrossRef] [PubMed]
- Phinyomark, A.; Scheme, E. A feature extraction issue for myoelectric control based on wearable EMG sensors. In Proceedings of the Sensors Applications Symposium (SAS), Seoul, Korea, 12–14 March 2018; pp. 1–6. [Google Scholar]
- Benatti, S.; Casamassima, F.; Milosevic, B.; Farella, E.; Schönle, P.; Fateh, S.; Burger, T.; Huang, Q.; Benini, L. A versatile embedded platform for EMG acquisition and gesture recognition. IEEE Trans. Biomed. Circuits Syst. 2015, 9, 620–630. [Google Scholar] [CrossRef] [PubMed]
- Amirabdollahian, F.; Walters, M. Application of support vector machines to detect hand and wrist gestures using a myoelectric armband. In Proceedings of the International Conference on Rehabilitation Robotics (ICORR2017), London, UK, 17–21 July 2017. [Google Scholar]
- Arief, Z.; Sulistijono, I.A.; Ardiansyah, R.A. Comparison of five time series EMG features extractions using myo armband. In Proceedings of the 2015 International Electronics Symposium (IES), Surabaya, Indonesia, 29–30 September 2015; pp. 11–14. [Google Scholar]
- Phinyomark, A.; Khushaba, R.N.; Scheme, E. Feature extraction and selection for myoelectric control based on wearable EMG sensors. Sensors 2018, 18, 1615. [Google Scholar] [CrossRef] [PubMed]
- Boyali, A.; Hashimoto, N.; Matsumoto, O. Hand posture and gesture recognition using myo armband and spectral collaborative representation based classification. In Proceedings of the 2015 IEEE 4th Global Conference on Consumer Electronics (GCCE), Osaka, Japan, 27–30 October 2015; pp. 200–201. [Google Scholar]
- Wahid, M.F.; Tafreshi, R.; Al-Sowaidi, M.; Langari, R. Subject-independent hand gesture recognition using normalization and machine learning algorithms. J. Comput. Sci. 2018, 27, 69–76. [Google Scholar] [CrossRef]
- Guo, W.; Sheng, X.; Liu, J.; Hua, L.; Zhang, D.; Zhu, X. Towards zero training for myoelectric control based on a wearable wireless sEMG armband. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; pp. 196–201. [Google Scholar]
- Masson, S.; Fortuna, F.; Moura, F.; Soriano, D. São Bernardo do Campo do ABC. Integrating myo armband for the control of myoelectric upper limb prosthesis. In Proceedings of the XXV Congresso Brasileiro de Engenharia Biomédica, Rio de Janeiro, Brazil, 17–20 October 2016. [Google Scholar]
- Radmand, A.; Scheme, E.; Kyberd, P.; Englehart, K. Investigation of optimum pattern recognition methods for robust myoelectric control during dynamic limb movement. In Proceedings of the 30th Conference Canadian Medical and Biological Engineering Society, Toronto, ON, Canada, 16–19 June 2007. [Google Scholar]
- Montoya, M.; Henao, O.; Muñoz, J. Muscle fatigue detection through wearable sensors: A comparative study using the myo armband. In Proceedings of the XVIII International Conference on Human Computer Interaction, Cancun, Mexico, 25–27 September 2017. [Google Scholar]
- Zhang, Y.; Chen, Y.; Yu, H.; Yang, X.; Lu, W.; Liu, H. Wearing-independent hand gesture recognition method based on EMG armband. Pers. Ubiquitous Comput. 2018, 22, 511–524. [Google Scholar] [CrossRef]
- Côté-Allard, U.; Fall, C.L.; Drouin, A.; Campeau-Lecours, A.; Gosselin, C.; Glette, K.; Laviolette, F.; Gosselin, B. Deep learning for electromyographic hand gesture signal classification by leveraging transfer learning. arXiv, 2018; arXiv:1801.07756. [Google Scholar]
- Bellingegni, A.D.; Gruppioni, E.; Colazzo, G.; Davalli, A.; Sacchetti, R.; Guglielmelli, E.; Zollo, L. NLR, MLP, SVM, and LDA: A comparative analysis on EMG data from people with trans-radial amputation. J. Neuroeng. Rehabilit. 2017, 14, 82. [Google Scholar] [CrossRef] [PubMed]
- Kamavuako, E.N.; Scheme, E.J.; Englehart, K.B. Determination of optimum threshold values for EMG time domain features; a multi-dataset investigation. J. Neural Eng. 2016, 13, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Le, Q.V. A tutorial on deep learning part 2: Autoencoders, convolutional neural networks and recurrent neural networks. Google Brain 2015, 1–20. [Google Scholar]
- Ur Rehman, M.Z.; Gilani, S.O.; Waris, A.; Niazi, I.K.; Kamavuako, E.N. A novel approach for classification of hand movements using surface EMG signals. In Proceedings of the 2017 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Bilbao, Spain, 18–20 December 2017; pp. 265–269. [Google Scholar]
- Ur rehman, M.Z.; Gilani, S.O.; Waris, A.; Jochumsen, M.; Niazi, I.K.; Kamavuako, E.N. Performance of combined surface and intramuscular EMG for classification of hand movements. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 17–21 July 2018. [Google Scholar]
- Møller, M.F. A scaled conjugate gradient algorithm for fast supervised learning. Neural Netw. 1993, 6, 525–533. [Google Scholar] [CrossRef]
- Bengio, Y.; Lamblin, P.; Popovici, D.; Larochelle, H. Greedy layer-wise training of deep networks. In Proceedings of the 21th Annual Conference on Neural Information Processing Systems, Vancouver, BC, Canada, 7–8 December 2007; pp. 153–160. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A.; Bengio, Y. Deep Learning; MIT Press: Cambridge, UK, 2016; Volume 1. [Google Scholar]
- McHugh, M.L. Multiple comparison analysis testing in ANOVA. Biochem. Med. Biochem. Med. 2011, 21, 203–209. [Google Scholar] [CrossRef]
- Dean, J.; Corrado, G.; Monga, R.; Chen, K.; Devin, M.; Mao, M.; Senior, A.; Tucker, P.; Yang, K.; Le, Q.V. Large scale distributed deep networks. In Proceedings of the 26th Annual Conference on Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–8 December 2012; pp. 1223–1231. [Google Scholar]
- Linderman, M.; Lebedev, M.A.; Erlichman, J.S. Recognition of handwriting from electromyography. PLoS ONE 2009, 4, 6791. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Days | 01 | 02 | 03 | 04 | 05 | 06 | 07 | 08 | 09 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 01 | - | 5.8 | 10.25 | 13.41 | 13 | 11.54 | 12.32 | 11.82 | 13.11 | 11.85 | 12.5 | 12.65 | 12.95 | 12.87 | 14.98 |
| 02 | 22.71 | - | 8.16 | 11.42 | 9.87 | 8.97 | 9.35 | 8.9 | 9.76 | 9.14 | 9.61 | 10.48 | 11.17 | 10.58 | 12.13 |
| 03 | 26.17 | 22.89 | - | 8.97 | 7.54 | 8.71 | 8.24 | 7.81 | 9.26 | 9.91 | 9.97 | 11.33 | 11.7 | 12 | 14.33 |
| 04 | 29.43 | 25.05 | 23.73 | - | 8.03 | 11.44 | 10.59 | 8.48 | 8.12 | 10.88 | 10.55 | 12.07 | 10.47 | 12.51 | 12.75 |
| 05 | 27.93 | 23.53 | 21.95 | 22.32 | - | 7.9 | 7.63 | 7.33 | 8.4 | 7.26 | 8.1 | 8.83 | 10.73 | 12.54 | 13.46 |
| 06 | 29.55 | 24.54 | 24.29 | 25.48 | 21.7 | - | 8.92 | 8.62 | 9.12 | 9.44 | 10.08 | 10.47 | 12.93 | 12.71 | 13.65 |
| 07 | 29.11 | 24.52 | 24.5 | 25.12 | 21.88 | 23.26 | - | 6.12 | 8.84 | 8.79 | 8.92 | 10.08 | 10.51 | 11.77 | 13.07 |
| 08 | 27.49 | 22.76 | 22.94 | 23.75 | 20.53 | 22.34 | 20.34 | - | 5.6 | 7.23 | 7.73 | 8.66 | 8.33 | 10.5 | 10.77 |
| 09 | 33.03 | 25.6 | 27.55 | 24.31 | 25.2 | 25.09 | 24.58 | 20.49 | - | 7.52 | 9.09 | 8.29 | 7.75 | 9.84 | 10.11 |
| 10 | 30.51 | 26.29 | 27.5 | 28.19 | 23.82 | 24.66 | 24.93 | 20.68 | 22.45 | - | 6.22 | 6.4 | 7.33 | 9.5 | 9.01 |
| 11 | 28.74 | 24.54 | 25.82 | 26.26 | 22.34 | 25.06 | 23.82 | 20.78 | 23.25 | 20.28 | - | 6.89 | 7.02 | 7.77 | 8.97 |
| 12 | 29.53 | 25.82 | 27.16 | 27.18 | 23.07 | 24.76 | 24.11 | 21.6 | 22.99 | 20.5 | 20.58 | - | 6.92 | 8.66 | 8.6 |
| 13 | 30.97 | 27.91 | 29.53 | 27.73 | 27.01 | 29.8 | 27.64 | 23.27 | 23.38 | 21.97 | 21.06 | 21.76 | - | 7.69 | 8.25 |
| 14 | 31.07 | 27.71 | 28.59 | 27.74 | 26.91 | 27.94 | 25.91 | 22.71 | 24.14 | 22.6 | 21.45 | 22.24 | 19.61 | - | 6.19 |
| 15 | 34.4 | 30.3 | 32.53 | 30.32 | 29.27 | 30.5 | 29.94 | 25.46 | 25.14 | 23.41 | 23.85 | 23.51 | 21.36 | 19.46 | - |
| Days | 01 | 02 | 03 | 04 | 05 | 06 | 07 | 08 | 09 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 01 | - | 6.77 | 11.54 | 15.28 | 13.68 | 13.08 | 13.97 | 13.01 | 15.55 | 14.27 | 14.51 | 15.31 | 15.52 | 18.19 | 17.95 |
| 02 | 9.93 | - | 8.57 | 13.02 | 10.51 | 10.26 | 10.07 | 9.08 | 10.55 | 9.88 | 10.34 | 11.12 | 11.29 | 13.81 | 14.24 |
| 03 | 14.04 | 11.49 | - | 9.32 | 8.37 | 10.07 | 8.71 | 8.18 | 10.5 | 10.31 | 10.7 | 12.49 | 12.45 | 14.73 | 17.04 |
| 04 | 16.97 | 14.47 | 13.84 | - | 9.18 | 12.29 | 11.91 | 9.41 | 9.96 | 12.18 | 11.05 | 13.2 | 11.83 | 15.45 | 16.36 |
| 05 | 16.25 | 13.85 | 12.49 | 12.3 | - | 7.81 | 8.24 | 7.15 | 9.27 | 7.54 | 8.66 | 9.91 | 11.52 | 15.31 | 16.76 |
| 06 | 16.85 | 13.49 | 14.54 | 15.71 | 12.36 | - | 8.78 | 8.77 | 10.14 | 10.01 | 10.54 | 11.48 | 14.45 | 14.05 | 15.3 |
| 07 | 15.57 | 12.79 | 13.08 | 14.54 | 12.33 | 12.89 | - | 6.63 | 9.09 | 8.36 | 8.88 | 10.13 | 11.45 | 13.32 | 14.29 |
| 08 | 15.66 | 12.85 | 12.78 | 13.43 | 11.9 | 13.34 | 11.14 | - | 6.54 | 7.25 | 8.04 | 8.69 | 8.55 | 12.35 | 12.68 |
| 09 | 18.79 | 14.83 | 15.68 | 13.95 | 13.67 | 14.68 | 13.24 | 10.34 | - | 7.64 | 9.41 | 9.29 | 9.33 | 11.47 | 11.8 |
| 10 | 18.66 | 15.47 | 15.83 | 16.72 | 12.87 | 14.49 | 12.99 | 11.32 | 12.79 | - | 6.9 | 6.9 | 9.26 | 11.14 | 10.68 |
| 11 | 17.57 | 15.03 | 15.79 | 15.43 | 13.4 | 15.3 | 12.72 | 11.82 | 12.49 | 11.28 | - | 7.62 | 7.84 | 9.28 | 10.85 |
| 12 | 16.91 | 15.34 | 16.91 | 16.51 | 13.51 | 15.54 | 12.66 | 11.8 | 12.38 | 11.11 | 10.57 | - | 7.89 | 10.22 | 10.27 |
| 13 | 19.07 | 16.83 | 17.77 | 17.48 | 16.67 | 18.45 | 15.55 | 13.35 | 13.53 | 13.91 | 11.77 | 11.54 | - | 9.44 | 8.85 |
| 14 | 20.02 | 16.95 | 17.79 | 17.73 | 17.09 | 17.98 | 15.8 | 15.1 | 14.53 | 16.05 | 12.41 | 13.41 | 12.17 | - | 7.37 |
| 15 | 21.29 | 18.94 | 20.85 | 19.21 | 19.39 | 19.73 | 17.68 | 15.39 | 15.32 | 15.56 | 13 | 13.36 | 12.46 | 10.16 | - |
| Analysis Type | Classifier | Sub 01 | Sub 02 | Sub 03 | Sub 04 | Sub 05 | Sub 06 | Sub 07 |
|---|---|---|---|---|---|---|---|---|
| Within-Session | LDA | 2.24 | 5.83 | 1.73 | 4.32 | 10.07 | 13.5 | 10.9 |
| SSAE-f | 1.08 | 2.9 | 1.05 | 0.7 | 2.61 | 1.36 | 3.4 | |
| SSAE-r | 18.25 | 28.69 | 16.83 | 19.38 | 23.42 | 21.56 | 27.08 | |
| CNN | 1.39 | 4.72 | 0.68 | 0.1 | 2.69 | 1.83 | 5.38 | |
| Between-Sessions | LDA | 6.28 | 10.57 | 4.43 | 9.4 | 13.82 | 16.61 | 20.54 |
| SSAE-f | 3.69 | 10.56 | 1.78 | 4.05 | 7.02 | 7.08 | 16.16 | |
| SSAE-r | 20.63 | 30.67 | 17.06 | 23.91 | 24.13 | 23.95 | 35.06 | |
| CNN | 3.39 | 8.93 | 1.53 | 3.52 | 5.17 | 6.28 | 14.52 | |
| Between Pairs of Days | LDA | 8.06 | 14.66 | 7.63 | 11.27 | 16.5 | 20.33 | 24.65 |
| SSAE-f | 5.43 | 15.59 | 6.54 | 6.8 | 10.06 | 12.02 | 20.39 | |
| SSAE-r | 20.62 | 29.21 | 21.12 | 24.15 | 24.39 | 25.39 | 31.32 | |
| CNN | 5.06 | 14.05 | 6.24 | 6.82 | 8.45 | 10.23 | 17.63 | |
| Leave-One-Out Between Days | LDA | 5.35 | 10.3 | 3.8 | 8.92 | 14.58 | 16.55 | 19.76 |
| SSAE-f | 2.19 | 6.5 | 1.56 | 2.34 | 5.78 | 5.7 | 14.34 | |
| SSAE-r | 19.95 | 22.5 | 24.38 | 26.15 | 22.69 | 19.14 | 23.64 | |
| CNN | 2.62 | 6.96 | 1.46 | 2.79 | 4.48 | 3.89 | 10.02 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zia ur Rehman, M.; Waris, A.; Gilani, S.O.; Jochumsen, M.; Niazi, I.K.; Jamil, M.; Farina, D.; Kamavuako, E.N. Multiday EMG-Based Classification of Hand Motions with Deep Learning Techniques. Sensors 2018, 18, 2497. https://0-doi-org.brum.beds.ac.uk/10.3390/s18082497
Zia ur Rehman M, Waris A, Gilani SO, Jochumsen M, Niazi IK, Jamil M, Farina D, Kamavuako EN. Multiday EMG-Based Classification of Hand Motions with Deep Learning Techniques. Sensors. 2018; 18(8):2497. https://0-doi-org.brum.beds.ac.uk/10.3390/s18082497
Chicago/Turabian StyleZia ur Rehman, Muhammad, Asim Waris, Syed Omer Gilani, Mads Jochumsen, Imran Khan Niazi, Mohsin Jamil, Dario Farina, and Ernest Nlandu Kamavuako. 2018. "Multiday EMG-Based Classification of Hand Motions with Deep Learning Techniques" Sensors 18, no. 8: 2497. https://0-doi-org.brum.beds.ac.uk/10.3390/s18082497