3.1. Sensor Performance
The fluctuations in
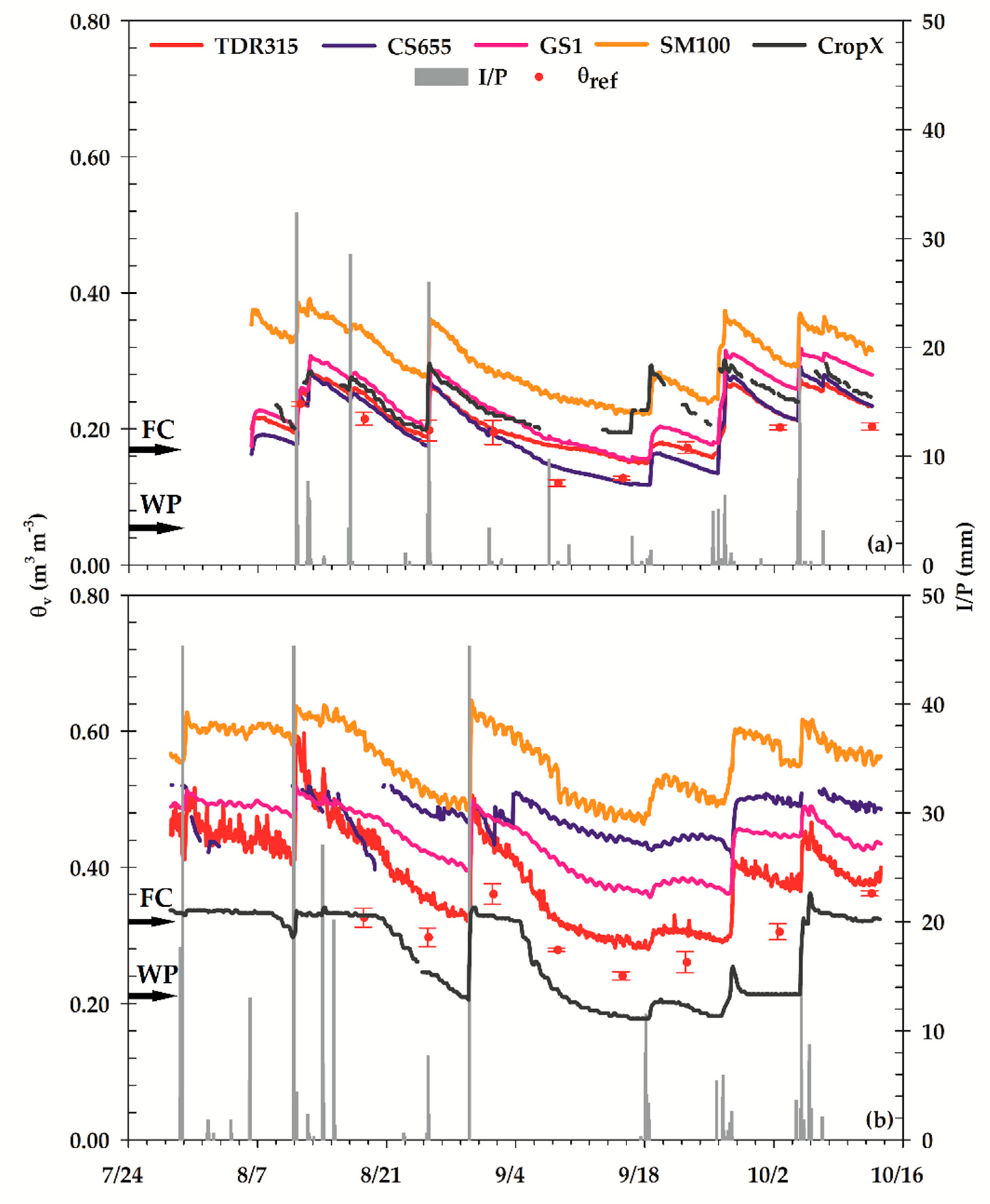
θv were similar across all sensors at both study sites (
Figure 2). All sensors responded to most irrigation and precipitation events. In some cases, there was little or no change in
θv following a watering event, mainly because the amount of water received was not large enough to reach sensor installation depth. The results of performance evaluation (statistical indicators) are summarized in
Table 3. In general, all sensors performed better at the LSLC. At this site, the RMSE was the lowest for CS655 (0.019 m
3 m
−3), followed by TDR315 (0.028 m
3 m
−3) and GS1 (0.048 m
3 m
−3). These values belong to the fair accuracy category defined in Fares et al. [
20], suggesting that CS655, TDR315, and GS1 can be implemented for effective irrigation scheduling under conditions similar to those of LSLC. The RMSE values obtained in this study were smaller than the RMSE values of 0.105 and 0.049 m
3 m
−3 reported by Singh et al. [
45] for the CS655 and TDR315 in a loam soil, respectively. Adeyemi et al. [
46] found a similar RMSE of 0.020 m
3 m
−3 for TDR315 and 0.050 m
3 m
−3 for GS1 in a sandy loam soil under laboratory conditions. The RMSE of CropX was 0.051 m
3 m
−3, which is in the poor category. The SM100’s RMSE was very poor (0.110 m
3 m
−3).
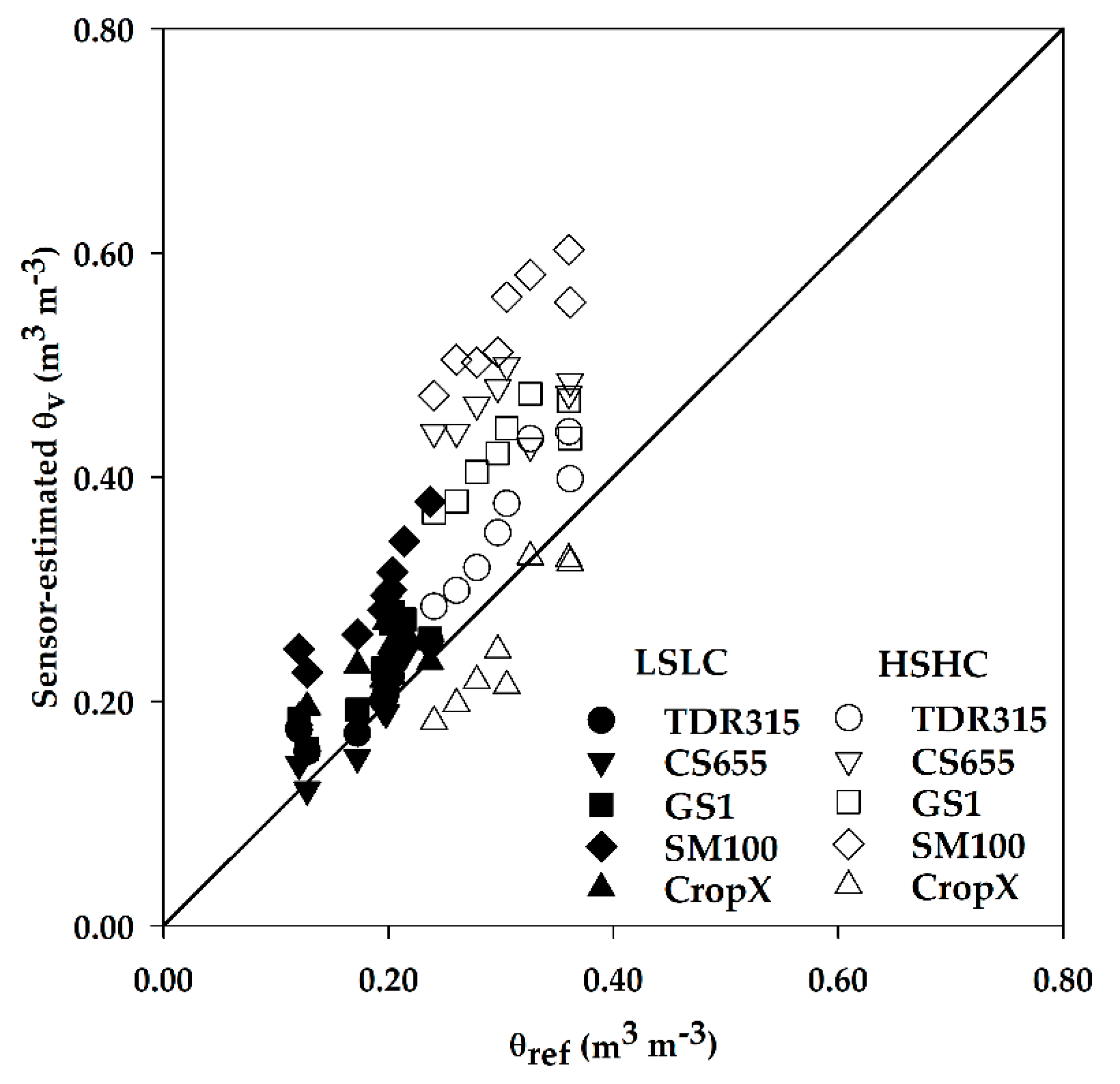
The MBE and RSR revealed similar patterns in sensor performance at the LSLC, with the CS655 performing the best, followed by TDR315, GS1, CropX, and SM100. The MBE indicated that all sensors overestimated
θv at LSLC. This overestimation can also be observed in
Figure 3 as most of the points were above the 1:1 line. Overestimation of
θv by CS655 was observed by Kisekka et al. [
47] and Michel et al. [
48] too. Adeyemi et al. [
46] found that TDR315 and GS1 underestimated
θv in sandy loam soil, but, with increasing clay content, the underestimation became overestimation. The RSR ranged from 0.53 for CS655 to 3.00 for SM100 at LSLC site. According to categories defined by Moriasi et al. [
39], the CS655 had a good model fit whereas all other sensors were classified as having unsatisfactory model fit. But as mentioned previously, running a model on temporal resolution higher than monthly would warrant less strict performance rating. Therefore, higher RSR values are expected in this study because of hourly time-step analysis. This trend was also observed in a study by Wyatt et al. [
49], which produced high RSR values at daily time-step.
All sensors had larger RMSE at the HSHC site compared to LSLC (
Table 3). However, the magnitude of the increase in RMSE was not uniform and changed from a slight increase for CropX to over an eight-fold increase for CS655. The CropX sensor had the smallest RMSE, followed by TDR315, GS1, CS655, and SM100. The values of RMSE belonged to the poor accuracy category in case of CropX and TDR315 and very poor category for other sensors according to classifications in Fares et al. [
20], suggesting that none of the sensors can be implemented for effective irrigation scheduling under conditions similar to those of HSHC. In addition, the variability of readings among the replications of the same sensors increased at HSHC; the average standard deviation (SD) ranged from 0.021 m
3 m
−3 for TDR315 to 0.050 m
3 m
−3 for CS655. At LSLC, the average SD varied from 0.011 m
3 m
−3 for TDR315 to 0.023 m
3 m
−3 for GS1. The average SD of
θref was 0.015 m
3 m
−3 at LSLC and 0.010 m
3 m
−3 at HSHC.
High clay content and elevated levels of salinity seem to be the main reasons behind lower sensor accuracies at the HSHC site. Adeyemi et al. [
46] concluded that the errors in TDR315 and GS1 would increase with an increase in soil salinity level. In addition, Wyseure et al. [
16] reported that the error in TDR sensors would remain within reasonable limits if the bulk EC is kept less than 2 dS m
−1. The bulk EC at HSHC, however, was well over this threshold. The MBE estimates were larger at HSHC than LSLC and showed that all sensors except CropX overestimated
θv. This is also evident in
Figure 3. Most of previous studies have reported overestimation error for TDR sensors under saline conditions. This is mainly due to the fact that in saline soils, the dielectric permittivity measured by TDR increases and therefore
θv is overestimated as mentioned in Dalton [
15]. However, Schwartz et al. [
18] found that TDR315 underestimated
θv in a saline Pullman clay loam soil. The RSR values followed a pattern similar to other error indicators at HSHC, having the smallest value of 1.34 for CropX and the largest value of 5.66 for SM100.
Some noise in
θv readings of the TDR315 at HSHC can be seen in
Figure 2b. Schwartz et al. [
18] reported that TDR315 sensors were insensitive to bulk EC up to 2.8 dS m
−1 and corresponding pore water EC up to 7.3 dS m
−1. The bulk EC and pore water EC exceeded these thresholds at HSHC on many days at the beginning of the study period. This might have caused signal attenuation that induced noise in
θv readings. This noise was quantified using standard deviation (SD) in
θv among the replications. At the beginning of the growing season, the SD had a range of zero to 0.099 m
3 m
−3 and an average of 0.021 m
3 m
−3 at HSHC for TDR315, which is much larger when compared to the range of 0.002 to 0.043 m
3 m
−3 and average of 0.012 m
3 m
−3 at LSLC during the same period. The observed noise was reduced later in the growing season, probably due to decrease in soil EC because of leaching of salts by irrigation water.
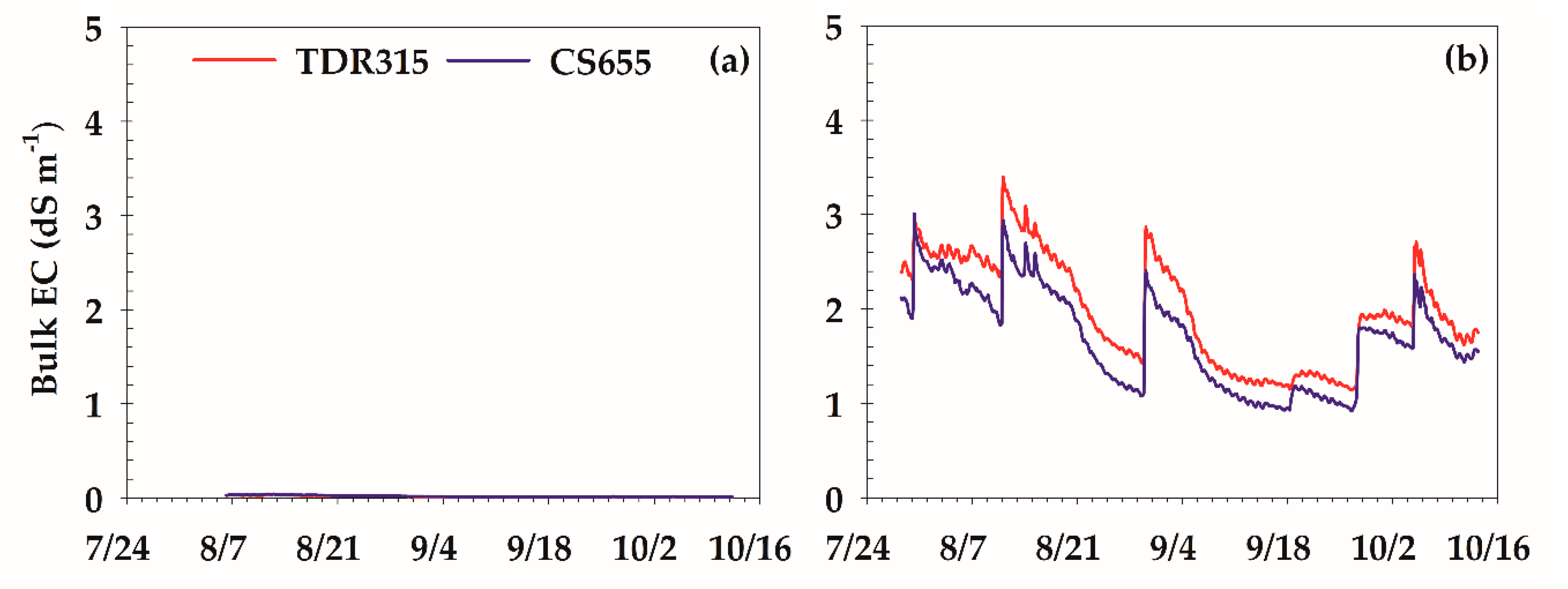
The hourly bulk EC estimates from TDR315 and CS655 were in agreement with soil EC determined in the laboratory and showed the significant difference between the two study sites (
Figure 4). Both sensors reported small bulk EC at LSLC with similar ranges of 0.1 to 0.4 dS m
−1. At HSHC, however, the bulk EC was significantly larger with ranges of 1.1 to 3.4 and 0.9 to 3.0 dS m
−1 based on TDR315 and CS655 sensors, respectively.
In utilizing soil moisture sensors for irrigation management, obtaining a complete time series is as important as taking accurate readings. In this study, CropX and CS655 had significant data gaps for different reasons. On average, 41% of the CropX data were missing at LSLC compared to less than one percent at HSHC. Several correspondences with the manufacturer revealed that the potential reason behind this issue could be the tall corn canopy at LSLC, which can block the transmitted signals. Upon recommendation from the manufacturer, extension antennas were installed on CropX sensors at LSLC. The observed crop height was 2.16 m and the extension antennas were installed in such a way that the tops of the antennae were 1.91 m from the ground. However, this modification did not help with the apparent transmission problem.
The CS655 had 21% missing data at HSHC. Sugita et al. [
50] conducted a reliability test on CS655 and found that the sensor was missing 64% of the measurements when exposed to high salinity levels (bulk EC = 1.2–2.1 dS m
−1). The bulk EC at HSHC was larger than the values reported in Sugita et al. [
50]. In addition to high salinity, the HSHC site had relatively high clay content (38.7%). The clay particles have highly charged surface areas which increase dielectric losses and cause the apparent permittivity (
Ka) values to go outside the acceptable range of Topp equation [
17]. The combined effect of higher soil salinity and clay content results in the attenuation of the electromagnetic signal from the sensor [
18].Therefore, the sensor fails to report
θv in case of
Ka ≥ 42 and
θv ≥ 0.52 m
3 m
−3 as the internal logical test rejects these data.
Linear regression equations were developed to estimate
θref based on sensor-estimated
θv (
Table 4). These equations can be used to get more accurate
θv readings in areas matching this study’s local conditions. At LSLC, the regression models were all statistically significant at α = 0.05, with
r2 values ranging from 0.57 for CropX to 0.85 for CS655. Although SM100 had low accuracy, the high
r2 value (0.84) indicates that this sensor had high degree of correlation with the reference values. At the HSHC site, the linear regression model for CS655 was not statistically significant. Models of other sensors were significant and had
r2 values varying from 0.73 to 0.85.
3.3. Soil Moisture Thresholds
At LSLC, the FC and WP estimated in the laboratory were similar to the output of the Rosetta model based on textural class, textural information, and textural information plus bulk density (
Table 6). Thresholds obtained from USDA’s Web Soil Survey (USDA-WSS) were slightly larger than the results of the laboratory and Rosetta methods. However, the estimates based on the ranking of sensor readings were significantly larger than those of the other methods. The FC and WP values were larger at HSHC compared to LSLC irrespective of the method used because of larger clay content in the soils. The FC values from the Rosetta model and the USDA-WSS were either similar or slightly smaller than those obtained with the laboratory approach. All ranking estimates of FC were significantly larger than those with laboratory approach except for CropX, which was slightly larger. In the case of WP, estimates from the Rosetta model were significantly smaller than those with the laboratory approach, while USDA-WSS reported a similar value. Ranking method estimates were significantly larger except for CropX. The differences between AWC estimates of the ranking and laboratory methods were smaller than the differences in the FC and WP estimates of the same methods at both sites, mainly because overestimations in FC and WP estimates of the ranking method were of similar magnitudes and thus cancelled out to a large extent.
Results of this study reveal that the Rosetta model is capable of accurately estimating soil moisture thresholds even with minimal input data (textural classes). The USDA-WSS also performed satisfactorily, despite the fact that it is based on coarse soil surveys. However, the ranking method resulted in significant overestimation of FC when compared to laboratory estimates, ranging from 59 to 117% at the LSLC and from 6 to 94% at HSHC site. The difference between WP estimates of the ranking and laboratory methods varied from 100 to 283% at LSLC and from −14 to 129% at HSHC. A potential reason behind this poor performance could be that the full range of soil moisture conditions was not experienced at both sites during the period of study. However, this situation could be the case in many irrigated areas, since producers attempt to replenish soil moisture well before it reaches WP to avoid water stress and yield loss. Another reason behind the poor performance of the ranking method is the error in sensor readings, especially at HSHC, where most sensors overestimated soil moisture due to high clay content and elevated salinity levels.
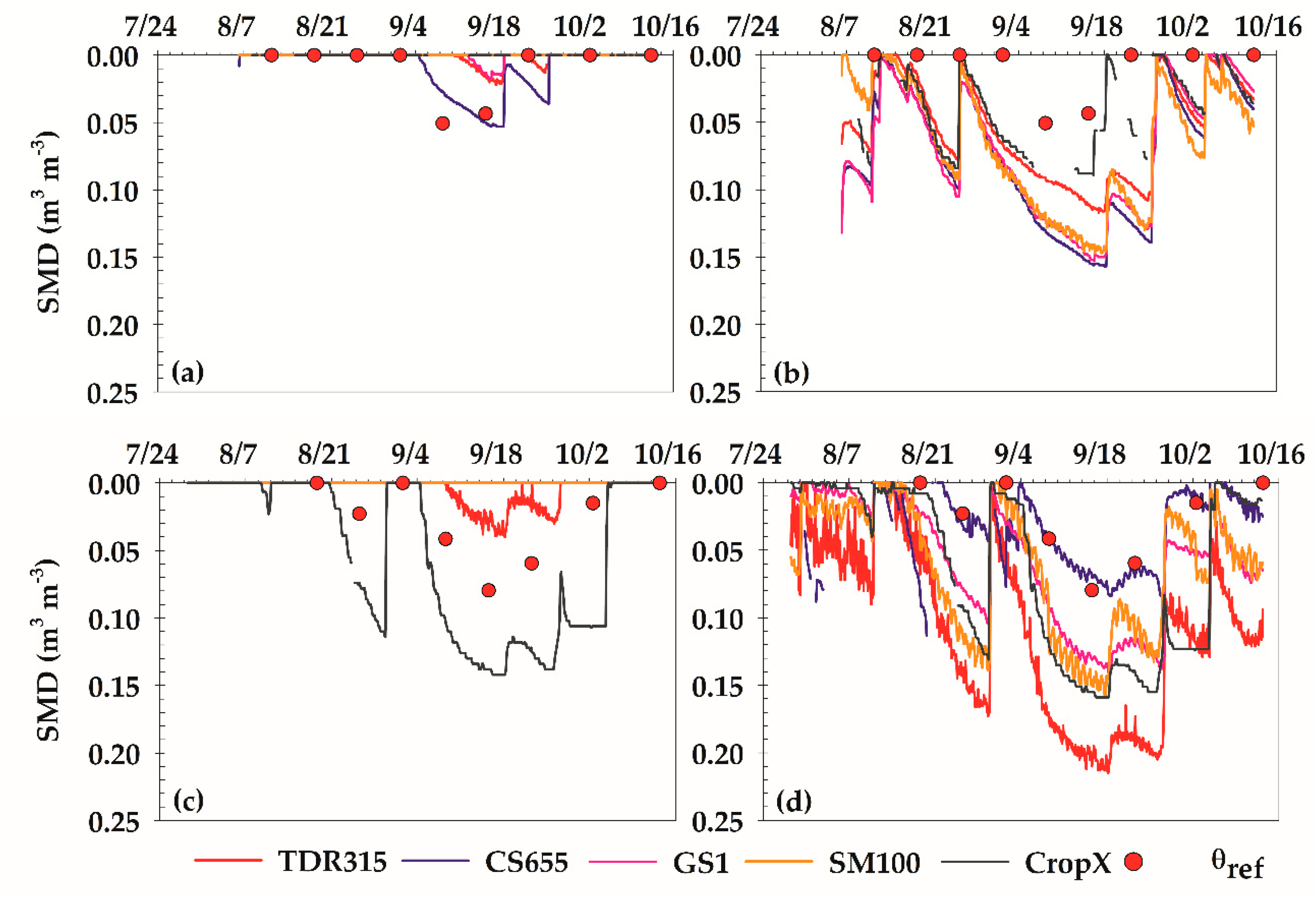
Variations in hourly SMD are presented in
Figure 5. In this figure, dots represent observed SMD based on
θref and laboratory-determined FC, while lines represent sensor SMD based on sensor
θv and FC from two methods: laboratory and ranking. The Rosetta model was not considered here because the FC values obtained from the model were similar to those of the laboratory. At LSLC, observed SMD values were zero except on two sampling dates in early September. This is because this site was under full to slightly over-irrigation at most times during the study period. The only exception for the same period was in September when crop water demand outpaced irrigation application. Possible underestimation of
θFC in the laboratory method may have contributed to zero SMD on most measurement dates too. In this study, a soil matric potential of −33 kPa was used to measure
θFC. But as mentioned before, this value can be as high as −10 kPa in sandy loam soil, resulting in a larger
θFC and consequently a larger SMD estimate. Sensor SMDs based on laboratory-FC had similar patterns, indicating no depletion during the study period except in the month of September (
Figure 5a). On the other hand, sensor SMDs based on ranking-FC showed significant depletions at most times, reaching values as large as 0.15 m
3 m
−3 (
Figure 5b). This increase in SMD is mainly due to overestimation of FC in the ranking method, since the same sensors readings were used in both SMD approaches.
At the HSHC site, the observed SMD indicated a larger depletion, especially during early September to early October. This pattern was expected since this site was under a low-frequency (7–10 days) flood irrigation regime that was not able to meet cotton water demand during the hot and dry month of September. At this site, sensor SMDs based on laboratory-FC showed no depletion except for CropX and TDR315. The SMD estimates of CropX were larger and the SMD estimates of TDR315 were smaller than observed SMD. This is because CropX underestimated θv, while TDR315 overestimated this parameter. The overestimation errors of the other sensors were so large that their θv readings were above laboratory-FC at all times, resulting in no depletion. The sensor SMDs based on ranking-FC were significantly larger than those based on laboratory-FC, except for CS655. This was because of the overestimation of FC by the ranking method. Hence, depletion was calculated at most times. The SMDs of CS655 were similar to the observed SMD, since the overestimation errors in θv readings and ranking-FC were similar in magnitude.

 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}