Hyperspectral Imaging in Environmental Monitoring: A Review of Recent Developments and Technological Advances in Compact Field Deployable Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
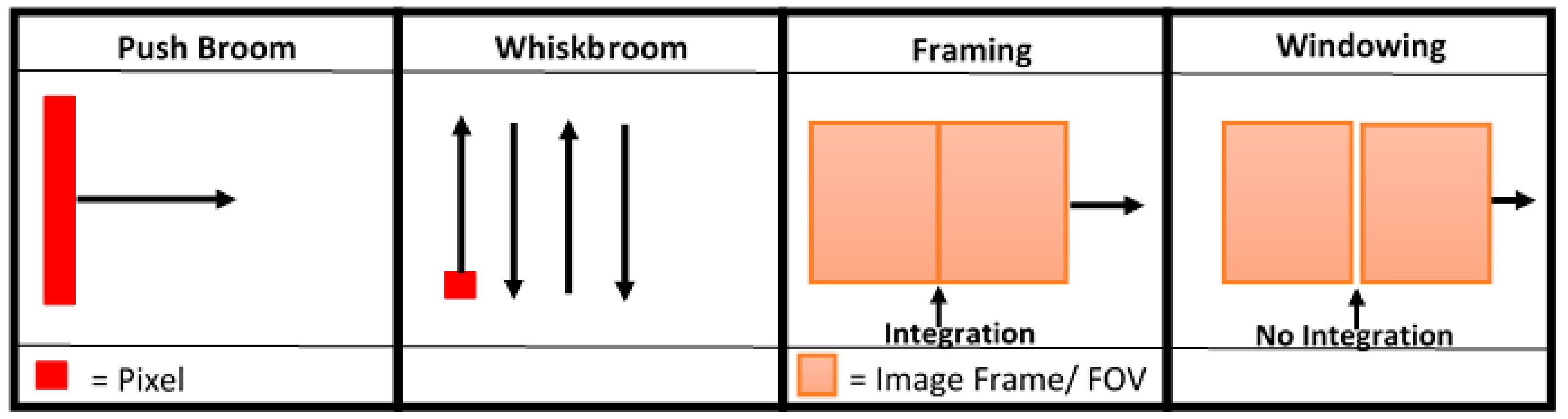
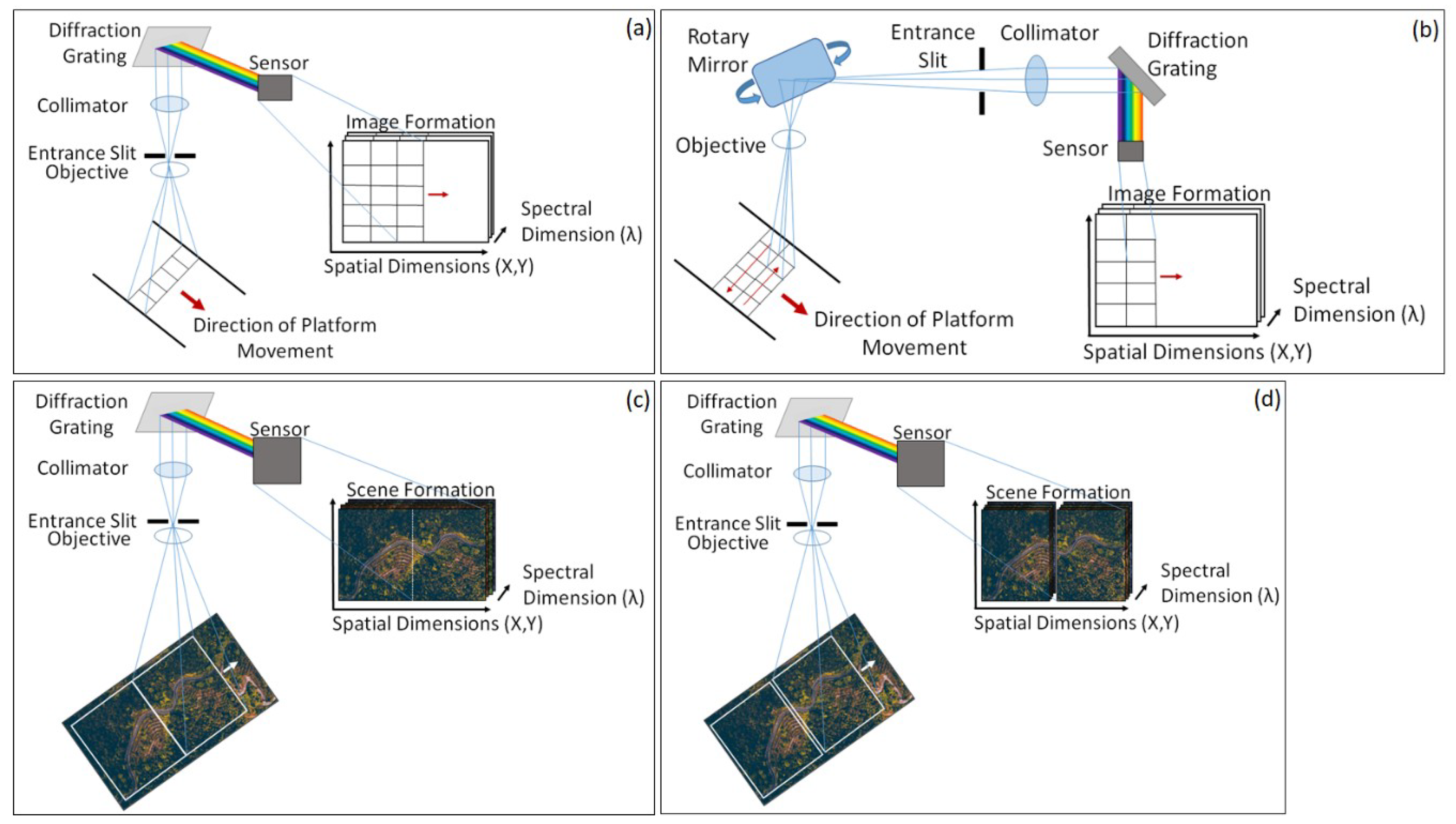
2. Sensor Types
3. Technological Developments and Associated Complexities
Georectification Difficulties
4. Applications within Environmental Monitoring
4.1. UAV Based Applications
4.1.1. Agricultural and Natural Vegetation Monitoring
4.1.2. Extreme Environment Monitoring
4.1.3. Pollution and Particulate Monitoring
4.2. Hand-Held and Ground-Based Device Applications
5. Discussion
- Compact light-weight design—Allowing for easy portability to a variety of field sites of varying accessibility. This criterion has particular benefits in relation to set-up times, enabling for rapid deployment of technical devices as well as significantly reducing the personnel requirements of field visits. As discussed above, this design feature is also of significant importance for sensors designed for UAV integration.
- Low-cost—Whilst this is not an essential requirement for successful environmental monitoring using field-based hyperspectral imaging, the production of low-cost sensors will increase the accessibility of this measurement modality, beyond the relatively limited field deployments achieved hitherto with the rather expensive previously available instrumentation. This is particularly the case for smartphone based platforms, given the ubiquity of these units, and their suitability for implementation as nodes within internet of things type architectures.
- Flexibility—In order to achieve the best results, deployed devices need to be easily configurable by researchers, allowing for adaptations to be made relating to the proposed device application. This criterion is most easily met by devices assembled “in house” as it allows researchers to develop and assemble components in the best arrangement for the proposed application, resulting in a device specifically designed for its task. This is typically more favourable than generic, commercial devices, which can be rather difficult to align to specific applications. Furthermore, a device developed “in house” can also provide significant reductions in set-up times as the researchers will generally be familiar with the device design.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Govender, M.; Chetty, K.; Bulcock, H. A review of hyperspectral remote sensing and its application in vegetation and water resource studies. Water SA 2017, 33, 145–152. [Google Scholar] [CrossRef]
- Ghamisi, P.; Yokoya, N.; Li, J.; Liao, W.; Liu, S.; Plaza, J.; Rasti, B.; Plaza, A. Advances in hyperspectral image and signal processing: A comprehensive overview of the state of the art. IEEE Geosci. Remote Sens. Mag. 2017, 5, 37–78. [Google Scholar] [CrossRef]
- Khan, M.J.; Khan, H.S.; Yousaf, A.; Khurshid, K.; Abbas, A. Modern trends in hyperspectral image analysis: A review. IEEE Access 2018, 6, 14118–14129. [Google Scholar] [CrossRef]
- Fischer, C.; Kakoulli, I. Multispectral and hyperspectral imaging technologies in conservation: Current research and potential applications. Stud. Conserv. 2006, 51, 3–16. [Google Scholar] [CrossRef]
- Padoan, R.; Steemers, T.A.; Klein, M.; Aalderink, B.; De Bruin, G. Quantitative hyperspectral imaging of historical documents: Technique and applications. Art Proc. 2008, 25–30. [Google Scholar]
- Liang, H. Advances in multispectral and hyperspectral imaging for archaeology and art conservation. Appl. Phys. A 2012, 106, 309–323. [Google Scholar] [CrossRef]
- Landgrebe, D. Information extraction principles and methods for multispectral and hyperspectral image data. In Information Processing for Remote Sensing; Chen, C., Ed.; World Scientific Publishing Co., Inc.: River Edge, NJ, USA, 1999; Volume 1, pp. 3–37. [Google Scholar]
- Honkavaara, E.; Heikki, S.; Kaivosoja, J.; Pölönen, I.; Hakala, T.; Litkey, P.; Mäkynen, J.; Pesonen, L. Processing and assessment of spectrometric stereoscopic imagery collected using a lightweight UAV spectral camera for precision agriculture. Remote Sens. 2013, 5, 5006–5039. [Google Scholar] [CrossRef]
- Liu, L.; Xu, L.; Peng, J. 3D Reconstruction from UAV-based hyperspectral images. Int. Arch. Photogramm. Remote sens. 2018, 42, 1073–1077. [Google Scholar] [CrossRef]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative remote sensing at ultra-high resolution with UAV spectroscopy: A review of sensor technology, measurement procedures, and data correction workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Wilcox, C.C.; Montes, M.; Yetzbacher, M.; Edelberg, J.; Schlupf, J. An ultra-compact hyperspectral imaging system for use with an unmanned aerial vehicle with smartphone-sensor technology. In Micro- and Nanotechnology Sensors, Systems, and Applications X, Proceedings of SPIE Defence and Security, Orlando Florida, United States, May 2018; International Society for Optics and Photonics: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Baccani, C.; Rossi, G.; Landini, F.; Salvatici, T.; Romoli, M.; Pancrazzi, M.; Facardi, M.; Noce, V.; Moretti, S.; Casagli, N. Optical design of a hyperspectral drone advanced camera for soil monitoring using an electro-optical liquid crystal technology. In Optical Design and Engineering VII, Proceedings of SPIE Optical Systems Design, Frankfurt, Germany, 5 June 2018; International Society for Optics and Photonics: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Blomquist, M.; Lyytikäinen-Saarenmaa, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Holopainen, M. Remote sensing of bark beetle damage in urban forests at individual tree level using a novel hyperspectral camera from UAV and aircraft. Urban For. Urban Green. 2018, 30, 72–83. [Google Scholar] [CrossRef]
- Garzonio, R.; Di Mauro, B.; Colombo, R.; Cogliati, S. Surface reflectance and sun-induced fluorescence spectroscopy measurements using a small hyperspectral UAS. Remote Sens. 2017, 9, 472. [Google Scholar] [CrossRef]
- Goetz, A.F. Three decades of hyperspectral remote sensing of the Earth: A personal view. Remote Sens. Environ. 2009, 113, S5–S16. [Google Scholar] [CrossRef]
- Lucieer, A.; Malenovský, Z.; Veness, T.; Wallace, L. HyperUAS—Imaging spectroscopy from a multirotor unmanned aircraft system. J. Field Robot. 2014, 31, 571–590. [Google Scholar] [CrossRef]
- Malenovský, Z.; Lucieer, A.; King, D.H.; Turnbull, J.D.; Robinson, S.A. Unmanned aircraft system advances health mapping of fragile polar vegetation. Methods Ecol. Evol. 2017, 8, 1842–1857. [Google Scholar] [CrossRef] [Green Version]
- Freitas, S.; Silva, H.; Almeida, J.; Silva, E. Hyperspectral imaging for real-time unmanned aerial vehicle maritime target detection. J. Intell. Robot. Syst. 2018, 90, 551–570. [Google Scholar] [CrossRef]
- Habib, A.; Zhou, T.; Masjedi, A.; Zhang, Z.; Flatt, J.E.; Crawford, M. Boresight calibration of GNSS/INS-assisted push-broom hyperspectral scanners on UAV platforms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1734–1749. [Google Scholar] [CrossRef]
- Fowler, J.E. Compressive pushbroom and whiskbroom sensing for hyperspectral remote-sensing imaging. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014. [Google Scholar]
- Uto, K.; Seki, H.; Saito, G.; Kosugi, Y.; Komatsu, T. Development of a Low-Cost Hyperspectral Whiskbroom Imager Using an Optical Fiber Bundle, a Swing Mirror, and Compact Spectrometers. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3909–3925. [Google Scholar] [CrossRef]
- Kerekes, J.P.; Schott, J.R. Hyperspectral imaging systems. In Hyperspectral Data Exploitation: Theory and Applications, 1st ed.; Chang, C.I., Ed.; John Wiley & Sons: Hoboken, NJ, USA, 2007; pp. 19–46. [Google Scholar]
- Uto, K.; Seki, H.; Saito, G.; Kosugi, Y. Development of lightweight hyperspectral imaging system for UAV observation. In Proceedings of the 2014 6th Workshop on Hyperspectral Image and Signals Processing: Evolution in Remote Sensing (WHISPERS), Lausanne, Switzerland, 24–27 June 2014. [Google Scholar] [CrossRef]
- Willett, R.M.; Duarte, M.F.; Davenport, M.A.; Baraniuk, R.G. Sparsity and structure in hyperspectral imaging: Sensing, reconstruction and target detection. IEEE Signal Proc. Mag. 2014, 31, 116–126. [Google Scholar] [CrossRef]
- Jaud, M.; Dantec, N.L.; Ammann, J.; Grandjean, P.; Constantin, D.; Akhtman, Y.; Barbieux, K.; Allemand, P.; Delacourt, C.; Merminod, B. Direct georeferencing of a pushbroom, lightweight hyperspectral system for mini-UAV applications. Remote Sens. 2018, 10, 204. [Google Scholar] [CrossRef]
- Sellar, R.G.; Boreman, G.D. Classification of imaging spectrometers for remote sensing applications. Opt. Eng. 2005, 44, 013602. [Google Scholar] [CrossRef]
- Clark, M.L. Mapping land cover with hyperspectral and multispectral satellites using machine learning and Spectral Mixture Analysis. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016. [Google Scholar]
- Glumb, R.; Lapsley, M.; Lee, D.; Mantica, P.; Dery, J.P. TRL6 testing of a hyperspectral infrared CubeSat instrument. In Proceedings of the AIAA Space and Astronautics Forum and Exposition, Orlando, FL, USA, 12–14 September 2017. [Google Scholar] [CrossRef]
- Selva, D.; Krejci, D. A survey and assessment of the capabilities of Cubesats for Earth observation. Acta Astronaut. 2012, 74, 50–68. [Google Scholar] [CrossRef]
- Wright, R.; Lucey, P.; Crites, S.; Horton, K.; Wood, M.; Garbeil, H. BBM/EM design of the thermal hyperspectral imager: An instrument for remote sensing of the Earth’s surface, atmosphere and ocean from a microsatellite platform. Acta Astronaut. 2013, 87, 182–192. [Google Scholar] [CrossRef]
- Poghosyan, A.; Golkar, A. CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions. Prog. Aerosp. Sci. 2017, 88, 59–83. [Google Scholar] [CrossRef]
- Habib, A.; Xiong, W.; He, F.; Yang, H.L.; Crawford, M. Improving orthorectification of UAV-based push-broom scanner imagery using derived orthophotos from frame cameras. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 262–276. [Google Scholar] [CrossRef]
- Herwitz, S.R.; Johnson, L.F.; Dunagan, S.E.; Higgins, R.G.; Sullivan, D.V.; Zheng, J.; Lobitz, B.M.; Leung, J.G.; Gallmeyer, B.A.; Aoyagi, M.; et al. Imaging from an unmanned aerial vehicle: Agricultural surveillance and decision support. Comput. Electron. Agric. 2004, 44, 49–61. [Google Scholar] [CrossRef]
- Hruska, R.; Mitchell, J.; Anderson, M.; Glenn, N.F. Radiometric and geometric analysis of hyperspectral imagery acquired from an unmanned aerial vehicle. Remote Sens. 2012, 4, 2736–2752. [Google Scholar] [CrossRef]
- Mozgeris, G.; Jonikavičius, D.; Jovarauskas, D.; Zinkevičius, R.; Petkevičius, S.; Steponavičius, D. Imaging from manned ultra-light and unmanned aerial vehicles for estimating properties of spring wheat. Precis. Agric. 2018, 19, 1–19. [Google Scholar] [CrossRef]
- Kirsch, M.; Lorenz, S.; Zimmermann, R.; Tusa, L.; Möckel, R.; Hödl, P.; Booysen, R.; Khodadadzadeh, M.; Gloaguen, R. Integration of terrestrial and drone-borne hyperspectral and photogrammetric sensing methods for exploration mapping and mining monitoring. Remote Sens. 2018, 10, 1366. [Google Scholar] [CrossRef]
- Zhang, C.; Anzalone, N.C.; Faria, R.P.; Pearce, J.M. Open-source 3D-printable optics equipment. PLoS ONE 2013, 8, e59840. [Google Scholar] [CrossRef]
- Wilkes, T.C.; McGonigle, A.J.S.; Willmott, J.R.; Pering, T.D.; Cook, J.M. Low-cost 3D printed 1nm resolution smartphone sensor-based spectrometer: Instrument design and application in ultraviolet spectroscopy. Opt. Lett. 2017, 42, 4323–4326. [Google Scholar] [CrossRef] [PubMed]
- Eckardt, A.; Reulke, R. Low cost hyperspectral systems for atmospheric and surface studies. In Imaging Spectroscopy XXII: Applications, Scenarios, and Processing, Proceedings of SPIE Optical Engineering and Applications, San Diego, USA, 2018; International Society for Optics and Photonics: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Senf, C.; Seidl, R.; Hostert, P. Remote sensing of forest insect disturbances: Current state and future directions. Int. J. Appl. Earth Obs. Geoinform. 2017, 60, 49–60. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-based photogrammetry and hyperspectral imaging for mapping bark beetle damage at tree-level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef]
- Moriya, E.A.S.; Imai, N.N.; Tommaselli, A.M.G.; Miyoshi, G.T. Mapping mosaic virus in sugarcane based on hyperspectral images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 740–748. [Google Scholar] [CrossRef]
- Havašová, M.; Bucha, T.; Ferenčík, J.; Jakuš, R. Applicability of a vegetation indices-based method to map bark beetle outbreaks in the High Tatra Mountains. Ann. For. Res. 2015, 58, 295–310. [Google Scholar] [CrossRef]
- Long, J.A.; Lawrence, R.L. Mapping percent tree mortality due to mountain pine beetle damage. For. Sci. 2016, 62, 392–402. [Google Scholar] [CrossRef]
- Gooding, E.A.; Deutsch, E.R.; Huehnerhoff, J.; Hajian, A.R. Fast, cheap and in control: Spectral imaging with handheld devices. In Next-Generation Spectroscopic Technologies X, Proceedings of SPIE Commercial and Scientific Sensing and Imaging, Anaheim, USA, 2017; International Society for Optics and Photonics: Washington, DC, USA, 2017. [Google Scholar] [CrossRef]
- Huehnerhoff, J.; Lozo, J.A.; Deutsch, E.R.; Hajian, A.R. High resolution handheld Raman and reflectance hyperspectral imaging for remote sensing and threat detection. In Next-Generation Spectroscopic Technologies XI, Proceedings of SPIE Commercial and Scientific Sensing and Imaging, Orlando, USA, 14 May 2018; International Society for Optics and Photonics: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Uto, K.; Seki, H.; Saito, G.; Kosugi, Y.; Komatsu, T. Development of hyperspectral imaging system using optical fiber bundle and swing mirror. In Proceedings of the 2015 7th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Tokyo, Japan, 2–5 June 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar] [CrossRef]
- Minařík, R.; Langhammer, J. Use of a Multispectral UAV Photogrammetry for Detection and Tracking of Forest Disturbance Dynamics. Int. Arch. Photogramm. 2016, 41, 711–718. [Google Scholar] [CrossRef]
- Dash, J.P.; Watt, M.S.; Pearse, G.D.; Heaphy, M.; Dungey, H.S. Assessing very high resolution UAV imagery for monitoring forest health during a simulated disease outbreak. ISPRS J. Photogramm. Remote Sens. 2017, 131, 1–14. [Google Scholar] [CrossRef]
- Wendel, A.; Underwood, J. Illumination compensation in ground based hyperspectral imaging. ISPRS J. Photogramm. Remote Sens. 2017, 129, 162–178. [Google Scholar] [CrossRef]
- Lehmann, J.R.K.; Nieberding, F.; Prinz, T.; Knoth, C. Analysis of unmanned aerial system-based CIR images in forestry—A new perspective to monitor pest infestation levels. Forests 2015, 6, 594–612. [Google Scholar] [CrossRef]
- Honkavaara, E.; Kaivosoja, J.; Mäkynen, J.; Pellikka, I.; Pesonen, L.; Saari, H.; Salo, H.; Hakala, T.; Marklelin, L.; Rosnell, T. Hyperspectral reflectance signatures and point clouds for precision agriculture by light weight UAV imaging system. ISPRS Ann. Photogramm. 2012, 7, 353–358. [Google Scholar] [CrossRef]
- Bareth, G.; Aasen, H.; Bendig, J.; Gnyp, M.L.; Bolten, A.; Jung, A.; Michels, R.; Soukkamäki, J. Low-weight and UAV-based Hyperspectral Full-frame Cameras for Monitoring Crops: Spectral Comparison with Portable Spectroradiometer Measurements. Photogrammetrie-Fernerkundung-Geoinformation 2015, 1, 69–79. [Google Scholar] [CrossRef]
- Jakob, S.; Zimmermann, R.; Gloaguen, R. The need for accurate geometric and radiometric corrections of drone-borne hyperspectral data for mineral exploration: Mephysto—A toolbox for pre-processing drone-borne hyperspectral data. Remote Sens. 2017, 9, 88. [Google Scholar] [CrossRef]
- Crocker, R.I.; Maslanik, J.A.; Adler, J.J.; Palo, S.E.; Herzfeld, U.C.; Emery, W.J. A sensor package for ice surface observations using small unmanned aircraft systems. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1033–1047. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Whitehead, K.; Brown, O.W.; Barchyn, T.E.; Moorman, B.J.; LeClair, A.; Riddell, K.; Hamilton, T. Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy of a photogrammetrically-derived digital terrain model. Geomorphology 2013, 194, 16–24. [Google Scholar] [CrossRef]
- Rippin, D.M.; Pomfret, A.; King, N. High resolution mapping of supra-glacial drainage pathways reveals link between micro-channel drainage density, surface roughness and surface reflectance. Earth Surf. Process. Landf. 2015, 40, 1279–1290. [Google Scholar] [CrossRef] [Green Version]
- Ryan, J.C.; Hubbard, A.L.; Box, J.E.; Todd, J.; Christoffersen, P.; Carr, J.R.; Holt, T.O.; Snooke, N.A. UAV photogrammetry and structure from motion to assess calving dynamics at Store Glacier, a large outlet draining the Greenland ice sheet. Cryosphere 2015, 9, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Bhardwaj, A.; Sam, L.; Akanksha; Martin-Torres, F.J.; Kumar, R. UAVs as remote sensing platform in glaciology: Present applications and future prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- Di Mauro, B.; Baccolo, G.; Garzonio, R.; Giardino, C.; Massabó, D.; Piazzalunga, A.; Rossini, M.; Colombo, R. Impact of impurities and cryoconite on the optical properties of the Morteratsch Glacier (Swiss Alps). Cryosphere 2017, 11, 2393–2409. [Google Scholar] [CrossRef] [Green Version]
- Pu, H.; Liu, J.-H.; Qu, D.; Sun, D.-W. Applications of imaging spectrometry in inland water quality monitoring—a review of recent development. Water Air Soil Pollut. 2017, 228, 131. [Google Scholar] [CrossRef]
- Pabón, R.E.C.; de Souza Filho, C.R.; de Oliveira, W.J. Reflectance and imaging spectroscopy applied to detection of petroleum hydrocarbons pollution in bare soils. Sci. Total Environ. 2019, 649, 1224–1236. [Google Scholar] [CrossRef] [PubMed]
- Gholizadeh, A.; Saberioon, M.; Ben-Dor, E.; Borůvka, L. Monitoring of selected soil contaminants using proximal and remote sensing techniques: Background, state-of-the-art and future perspectives. Crit. Rev. Environ. Sci. Technol. 2018, 48, 243–278. [Google Scholar] [CrossRef]
- Olmanson, L.G.; Brezonik, P.L.; Bauer, M.E. Airborne hyperspectral remote sensing to assess spatial distribution of water quality characteristics in large rivers: The Mississippi River and its tributaries in Minnesota. Remote Sens. Environ. 2013, 130, 254–265. [Google Scholar] [CrossRef]
- Dierssen, H.M.; Chlus, A.; Russell, B. Hyperspectral discrimination of floating mats of seagrass wrack and the macroalgae Sargassum in coastal waters of Greater Florida Bay using airborne remote sensing. Remote Sens. Environ. 2015, 167, 247–258. [Google Scholar] [CrossRef]
- Pabón, R.E.C.; de Souza Filho, C.R. Spectroscopic characterization of red latosols contaminated by petroleum-hydrocarbon and empirical model to estimate pollutant content and type. Remote Sens. Environ. 2016, 175, 323–336. [Google Scholar] [CrossRef]
- Scafutto, R.D.P.M.; de Souza Filho, C.R.; Rivard, B. Characterization of mineral substrates impregnated with crude oils using proximal infrared hyperspectral imaging. Remote Sens. Environ. 2016, 179, 116–130. [Google Scholar] [CrossRef]
- Scafutto, R.D.P.M.; de Souza Filho, C.R.; de Oliveira, W.J. Hyperspectral remote sensing detection of petroleum hydrocarbons in mixtures with mineral substrates: Implications for onshore exploration and monitoring. ISPRS J. Photogramm. Remote Sens. 2017, 128, 146–157. [Google Scholar] [CrossRef]
- Memisoglu, G.; Gulbahar, B.; Zubia, J.; Villatoro, J. Theoretical modelling of viscosity monitoring with vibrating resonance energy transfer for point-of-care and environmental monitoring. Micromachines 2018, 10, 3. [Google Scholar] [CrossRef]
- Alvarado, M.; Gonzalez, F.; Fletcher, A.; Doshi, A. Towards the development of a low cost airborne sensing system to monitor dust particles after blasting at open-pit mine sites. Sensors 2015, 15, 19667–19687. [Google Scholar] [CrossRef] [PubMed]
- Ng, C.L.; Kai, F.M.; Tee, M.H.; Tan, N.; Hemond, H.F. A prototype sensor for in situ sensing of fine particulate matter and volatile organic compounds. Sensors 2018, 18, 265. [Google Scholar] [CrossRef] [PubMed]
- Reid, J.P.; Bertram, A.K.; Topping, D.O.; Laskin, A.; Martin, S.T.; Petters, M.D.; Pope, F.D.; Rovelli, G. The viscosity of atmospherically relevant organic particles. Nat. Commun. 2018, 9, 956. [Google Scholar] [CrossRef] [PubMed]
- Ziph-Schatzberg, L.; Woodman, P.; Nakanishi, K.; Cornell, J.; Wiggins, R.; Swartz, B.; Holasek, R. Compact, high performance hyperspectral systems design and applications. In Next-Generation Spectroscopic Technologies VIII, Proceedings of SPIE Sensing Technology and Application, Baltimore, USA, 2015; International Society for Optics and Photonics: Washington, DC, USA, 2015. [Google Scholar] [CrossRef]
- Holasek, R.; Nakanishi, K.; Ziph-Schatzberg, L.; Santman, J.; Woodman, P.; Zacaroli, R.; Wiggins, R. The selectable hyperspectral airborne remote sensing kit (SHARK) as an enabler for precision agriculture. In Hyperspectral Imaging Sensors: Innovative Applications and Sensor Standards 2017, Proceedings of SPIE Commercial and Scientific Sensing and Imaging, Anaheim, USA, 2017; International Society for Optics and Photonics: Washington, DC, USA, 2017. [Google Scholar] [CrossRef]
- Shan, J.; Zhao, J.; Liu, L.; Zhang, Y.; Wang, X.; Wu, F. A novel way to rapidly monitor micro plastics in soil by hyperspectral imaging technology and chemometrics. Environ. Pollut. 2018, 238, 121–129. [Google Scholar] [CrossRef] [PubMed]
- Karlsson, T.M.; Grahn, H.; van Bavel, B.; Geladi, P. Hyperspectral imaging and data analysis for detecting and determining plastic contamination in seawater filtrates. J. Near Infrared Spectrosc. 2016, 24, 141–149. [Google Scholar] [CrossRef]
- Chennu, A.; Färber, P.; De’ath, G.; de Beer, D.; Fabricius, K.E. A diver-operated hyperspectral imaging and topographic surveying system for automated mapping of benthic habitats. Sci. Rep. 2017, 7, 7122. [Google Scholar] [CrossRef] [PubMed]
- Wilkes, T.C.; Pering, T.D.; McGonigle, A.J.S.; Tamburello, G.; Willmott, J.R. A low-cost smartphone sensor-based UV camera for volcanic SO2 emission measurements. Remote Sens. 2017, 9, 27. [Google Scholar] [CrossRef]
- McGonigle, A.J.S.; Wilkes, T.C.; Pering, T.D.; Willmott, J.R.; Cook, J.M.; Mims, F.M.; Parisi, A.V. Smartphone spectrometers. Sensors 2018, 18, 223. [Google Scholar] [CrossRef]
- McGonigle, A.J.S.; Pering, T.D.; Wilkes, T.C.; Tamburello, G.; D’aleo, R.; Bitetto, M.; Aiuppa, A.; Willmott, J.R. Ultraviolet imaging of volcanic plumes: A new paradigm in volcanology. Geosciences 2017, 7, 68. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Joshi, P.K.; Sam, L.; Snehmani. Remote sensing of alpine glaciers in visible and infrared wavelengths: A survey of advances and prospects. Geocarto Int. 2015, 31, 557–574. [Google Scholar] [CrossRef]
- Zhang, C.; Cheng, G.; Edwards, P.; Zhou, M.-D.; Zheng, S.; Liu, Z. G-Fresnel smartphone spectrometer. Lab Chip 2016, 16, 246–250. [Google Scholar] [CrossRef] [PubMed]
- Sigernes, F.; Syrjäsuo, M.; Strovold, R.; Fortuna, J.; Grøtte, M.E.; Johansen, T.A. Do it yourself hyperspectral imager for handheld to airborne operations. Opt. Express 2018, 26, 6021–6035. [Google Scholar] [CrossRef] [PubMed]
- Hossain, A.; Canning, J.; Cook, K.; Jamalipour, A. Optical fiber smartphone spectrometer. Opt. Lett. 2016, 41, 2237–2240. [Google Scholar] [CrossRef] [PubMed]
- Lane, N.D.; Miluzzo, E.; Lu, H.; Peebles, D.; Choudhury, T.; Campbell, A.T. A survey of mobile phone sensing. IEEE Commun. Mag. 2010, 48, 140–150. [Google Scholar] [CrossRef]
- Contreras-Naranjo, J.C.; Wei, Q.; Ozcan, A. Mobile phone-based microscopy, sensing, and diagnostics. IEEE J. Sel. Top. Quantum Electron. 2016, 22, 1–14. [Google Scholar] [CrossRef]
- Zhu, H.; Sikora, U.; Ozcan, A. Quantum dot enabled detection of Escherichia coli using a cell-phone. Analyst 2012, 137, 2541–2544. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dutta, S.; Choudhury, A.; Nath, P. Evanescent wave coupled spectroscopic sensing using smartphone. IEEE Photonics Technol. Lett. 2014, 26, 568–570. [Google Scholar] [CrossRef]
- Hossain, A.; Canning, J.; Ast, S.; Cook, K.; Rutledge, P.J.; Jamalipour, A. Combined “dual” absorption and fluorescence smartphone spectrometers. Opt. Lett. 2015, 40, 1737–1740. [Google Scholar] [CrossRef]
- Ozcan, A. Mobile phones democratize and cultivate next-generation imaging, diagnostics, and measurement tools. Lab Chip 2014, 14, 3187–3194. [Google Scholar] [CrossRef]
- Smith, Z.J.; Chu, K.; Espenson, A.R.; Rahimzadeh, M.; Gryshuk, A.; Molinaro, M.; Pwyre, D.E.; Lane, S.; Matthews, D.; Wachsmann-Hogiu, S. Cell-phone-based platform for biomedical device development and educational applications. PLoS ONE 2011, 6, e17150. [Google Scholar] [CrossRef]
- Rissanen, A.; Saari, H.; Rainio, K.; Stuns, I.; Viherkanto, K.; Holmlund, C.; Näkki, I.; Ojanen, H. MEMS FPI-based smartphone hyperspectral imager. In Next-Generation Spectroscopic Technologies IX, Proceedings of SPIE Commercial and Scientific Sensing and Imaging, Baltimore, USA, 2016; International Society for Optics and Photonics: Washington, DC, USA, 2016. [Google Scholar] [CrossRef]
- Näsilä, A.; Trops, R.; Stuns, I.; Havia, T.; Saari, H.; Guo, B.; Ojanen, H.J.; Akujärvi, A.; Rissanen, A. Hand-held MEMS hyperspectral imager for VNIR mobile applications. In MOEMS and Miniaturized Systems XVII, Proceedings of SPIE, San Francisco, USA, 2018; International Society for Optics and Photonics: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Vergouw, B.; Nagel, H.; Bondt, G.; Custers, B. Drone technology: Types, payloads, applications, frequency spectrum issues and future developments. In The Future of Drone Use, 1st ed.; Custers, B., Ed.; TMC Asser Press: The Hague, The Netherlands, 2016; Volume 27, pp. 21–45. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Anderson, K.; DeBell, L.; Duffy, J.P. A UK Civil Aviation Authority (CAA)-approved operations manual for safe deployment of light-weight drones in research. Int. J. Remote Sens. 2017, 38, 2737–2744. [Google Scholar] [CrossRef]
- Clark, R. Understanding the drone epidemic. Comput. Law Secur. Rev. 2014, 30, 230–246. [Google Scholar] [CrossRef]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stuart, M.B.; McGonigle, A.J.S.; Willmott, J.R. Hyperspectral Imaging in Environmental Monitoring: A Review of Recent Developments and Technological Advances in Compact Field Deployable Systems. Sensors 2019, 19, 3071. https://0-doi-org.brum.beds.ac.uk/10.3390/s19143071
Stuart MB, McGonigle AJS, Willmott JR. Hyperspectral Imaging in Environmental Monitoring: A Review of Recent Developments and Technological Advances in Compact Field Deployable Systems. Sensors. 2019; 19(14):3071. https://0-doi-org.brum.beds.ac.uk/10.3390/s19143071
Chicago/Turabian StyleStuart, Mary B., Andrew J. S. McGonigle, and Jon R. Willmott. 2019. "Hyperspectral Imaging in Environmental Monitoring: A Review of Recent Developments and Technological Advances in Compact Field Deployable Systems" Sensors 19, no. 14: 3071. https://0-doi-org.brum.beds.ac.uk/10.3390/s19143071