Wearable Hand Module and Real-Time Tracking Algorithms for Measuring Finger Joint Angles of Different Hand Sizes with High Accuracy Using FBG Strain Sensor



 ,
, 
Abstract
:1. Introduction
2. FBG Strain Sensor and Hardware Design
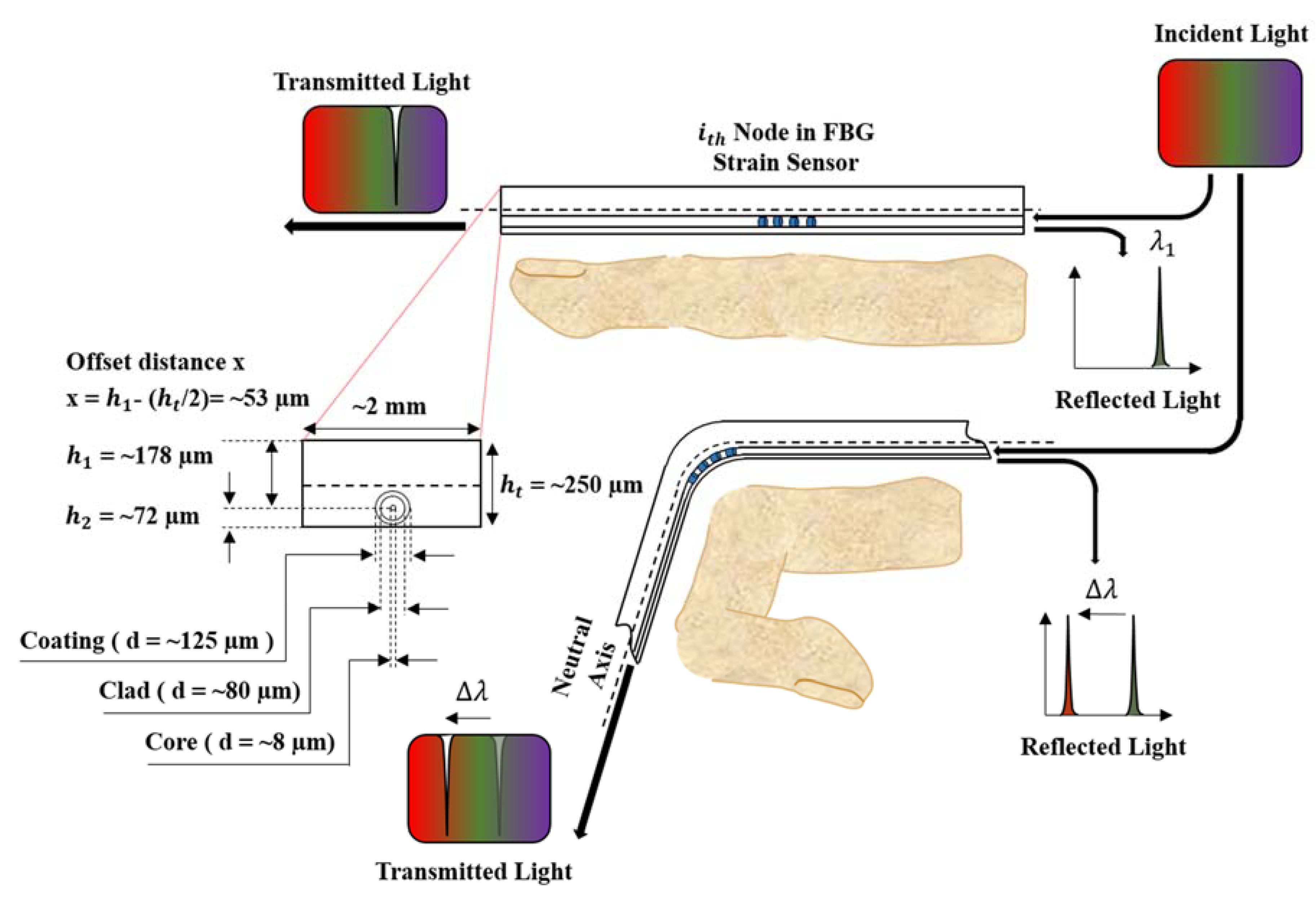
2.1. Principle of the FBG Sensor
2.2. Design of the Embedded FBG Strain Sensor
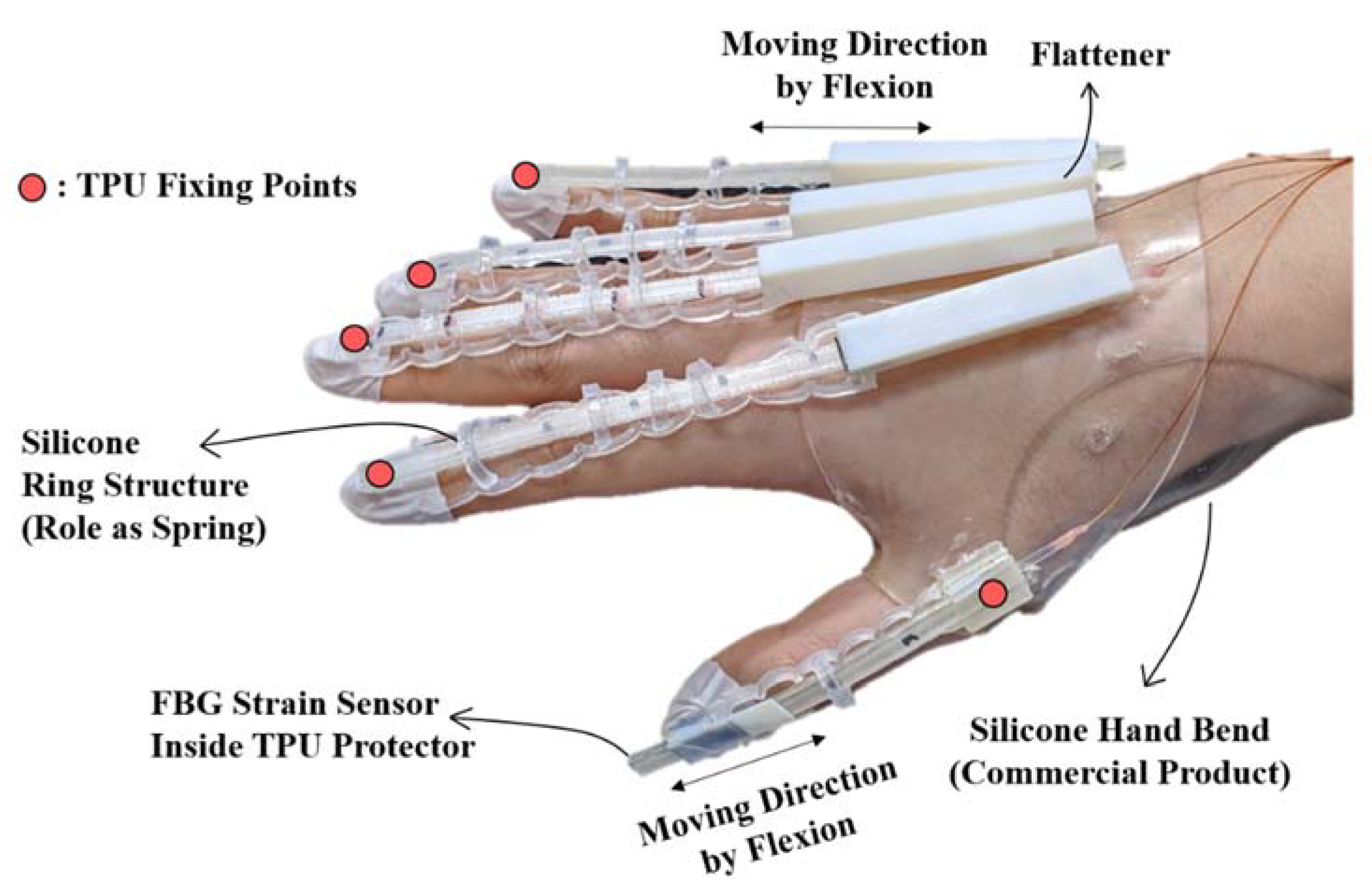
2.3. Fabrication of the Wearable Hand Module
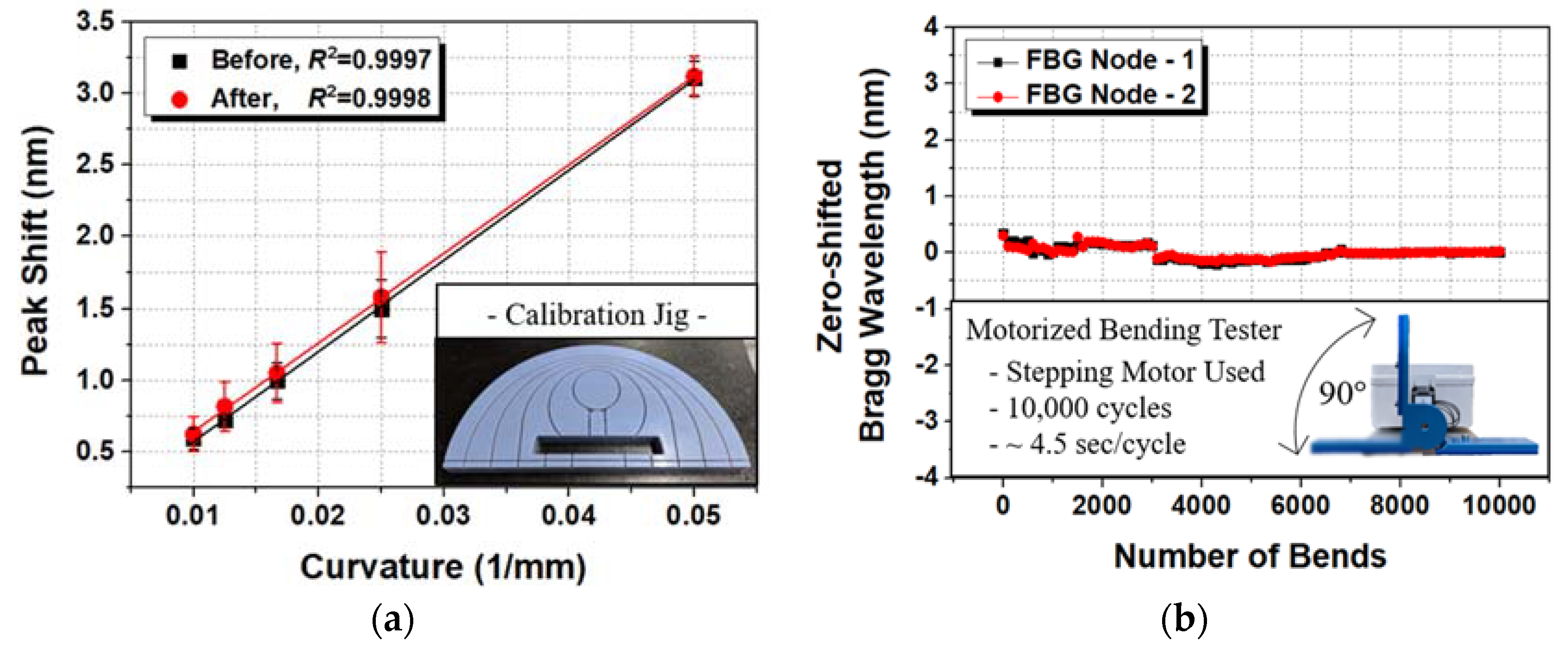
2.4. Evaluation of the FBG Strain Sensor
3. FBG Interrogation System and Real-Time Tracking Algorithm
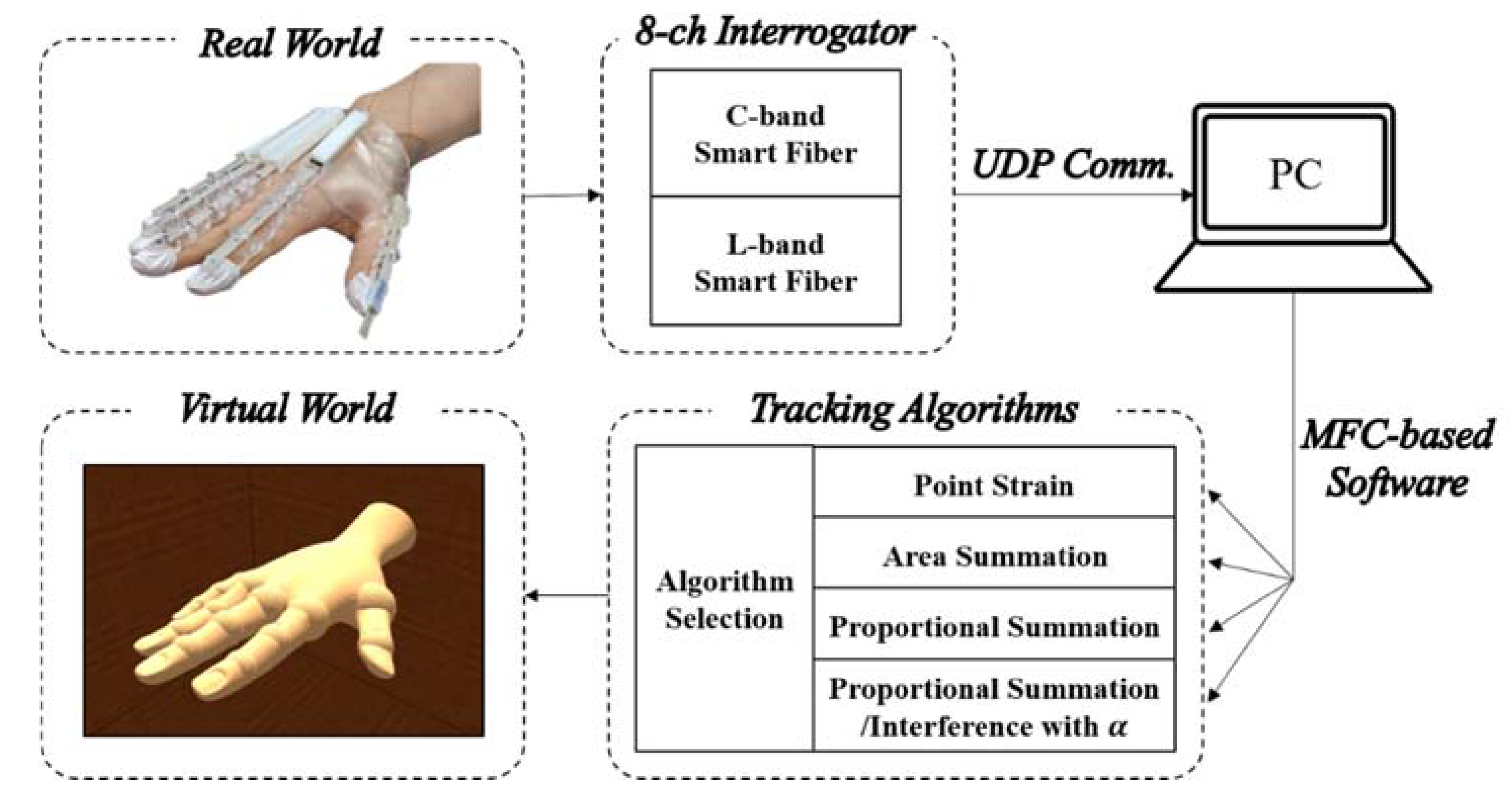
3.1. Interrogation Process
3.2. Proposed Algorithm
4. Joint Angle Measurement
4.1. Investigation with Different Hand Sizes
4.2. 3D Printed Hand Replica and Measurement Process
4.3. Quantitative Measurement with the Hand Replica
4.4. Rendering of Fingers of Different Users in Real Time
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nishiyama, M.; Watanabe, K. Wearable sensing glove with embedded hetero-core fiber-optic nerves for unconstrained hand motion capture. IEEE Trans. Instrum. Meas. 2009, 58, 3995–4000. [Google Scholar] [CrossRef]
- Cui, J.; Sun, Z. Visual hand motion capture for guiding a dexterous hand. In Proceedings of the 2004 6th IEEE International Conference on Automatic Face and Gesture Recognition, Seoul, Korea, 19 May 2004; pp. 729–734. [Google Scholar]
- Li, C.; Cui, Y.-L.; Tian, G.-L.; Shu, Y.; Wang, X.-F.; Tian, H.; Yang, Y.; Wei, F.; Ren, T.-L. Flexible CNT-array double helices strain sensor with high stretchability for motion capture. Sci. Rep. 2015, 5, 1–8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ma, Y.; Jia, W.; Li, C.; Yang, J.; Mao, Z.-H.; Sun, M. Magnetic hand motion tracking system for human–machine interaction. Electron. Lett. 2010, 46, 621–623. [Google Scholar] [CrossRef]
- Kim, D.; Yoon, S.; Park, Y.; Jeon, K.; Park, S.; Jeon, J.; Seo, K. Design and Implementation of a Wearable Hand Rehabilitation Robot for spasticity patient. In Proceedings of the 2014 Korean Society of Computer Information Conference, Jeju, Korea, 17–19 July 2014; pp. 21–24. [Google Scholar]
- Jha, C.K.; Agarwal, S.; Chakraborty, A.L.; Shirpurkar, C. An FBG-based sensing glove to measure dynamic finger flexure with an angular resolution of 0.1 up to speeds of 80/s. J. Lightwave Technol. 2019, 37, 4734–4740. [Google Scholar] [CrossRef]
- Park, W.; Ro, K.; Kim, S.; Bae, J. A soft sensor-based three-dimensional (3-D) finger motion measurement system. Sensors 2017, 17, 420. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sani, M.F.; Abeywardena, S.; Psomopoulou, E.; Ascione, R.; Dogramadzi, S. Towards Finger Motion Tracking and Analyses for Cardiac Surgery. In Proceedings of the 15th Mediterranean Conference on Medical and Biological Engineering and Computing (MEDICON 2019), Coimbra, Porutugal, 26–28 September 2019; pp. 1515–1525. [Google Scholar]
- Wang, L.; Meydan, T.; Williams, P.I. A two-axis goniometric sensor for tracking finger motion. Sensors 2017, 17, 770. [Google Scholar] [CrossRef] [Green Version]
- Gumpp, T.; Azad, P.; Welke, K.; Oztop, E.; Dillmann, R.; Cheng, G. Unconstrained Real-time Markerless Hand Tracking for Humanoid Interaction. In Proceedings of the 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 88–93. [Google Scholar]
- Ballan, L.; Cortelazzo, G.M. Marker-less motion capture of skinned models in a four camera set-up using optical flow and silhouettes. In Proceedings of the 3DPVT, Atlanta, GA, USA, 18–20 June 2008. [Google Scholar]
- Shimada, N.; Shirai, Y.; Kuno, Y.; Miura, J. Hand gesture estimation and model refinement using monocular camera-ambiguity limitation by inequality constraints. In Proceedings of the IEEE International Conference on Automatic Face and Gesture Recognition, Nara, Japan, 14–16 April 1998; pp. 268–273. [Google Scholar]
- Erol, A.; Bebis, G.; Nicolescu, M.; Boyle, R.D.; Twombly, X. Vision-based hand pose estimation: A review. Comput. Vis. Image Underst. 2007, 108, 52–73. [Google Scholar] [CrossRef]
- Ahmad, N.; Ghazilla, R.A.R.; Khairi, N.M.; Kasi, V. Reviews on various inertial measurement unit (IMU) sensor applications. Int. J. Signal Proc. 2013, 1, 256–262. [Google Scholar] [CrossRef] [Green Version]
- Esser, P.; Dawes, H.; Collett, J.; Howells, K. IMU: Inertial sensing of vertical CoM movement. J. Biomech. 2009, 42, 1578–1581. [Google Scholar] [CrossRef]
- Bai, S.; Lai, J.; Lyu, P.; Xu, X.; Liu, M.; Huang, K. A System-Level Self-Calibration Method for Installation Errors in A Dual-Axis Rotational Inertial Navigation System. Sensors 2019, 19, 4005. [Google Scholar] [CrossRef] [Green Version]
- Narasimhappa, M.; Mahindrakar, A.D.; Guizilini, V.C.; Terra, M.H.; Sabat, S.L. MEMS Based IMU Drift Minimization: Sage Husa Adaptive Robust Kalman Filtering. IEEE Sens. J. 2019, 20, 250–260. [Google Scholar] [CrossRef]
- Wittmann, F.; Lambercy, O.; Gassert, R. Magnetometer-based drift correction during rest in IMU arm motion tracking. Sensors 2019, 19, 1312. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bravo-Illanes, G.P.; Halvorson, R.; Matthew, R.; Lansdown, D.; Ma, C.; Bajcsy, R. IMU Sensor Fusion Algorithm for Monitoring Knee Kinematics in ACL Reconstructed Patients. In Proceedings of the 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 5877–5881. [Google Scholar]
- Li, M.P.; Zhuo, Y.; He, B.; Liang, Z.; Xu, G.; Xie, J.; Zhang, S. A 3D-printed soft hand exoskeleton with finger abduction assistance. In Proceedings of the 16th International Conference on Ubiquitous Robots (UR), Jeju, Korea, 24–27 June 2019; pp. 319–322. [Google Scholar]
- Lu, S.; Chen, D.; Liu, C.; Jiang, Y.; Wang, M. A 3-D finger motion measurement system via soft strain sensors for hand rehabilitation. Sens. Actuators A 2019, 285, 700–711. [Google Scholar] [CrossRef]
- Li, X.; Wen, R.; Shen, Z.; Wang, Z.; Luk, K.D.K.; Hu, Y. A wearable detector for simultaneous finger joint motion measurement. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 644–654. [Google Scholar] [CrossRef]
- Sato, J.; Sekine, T.; Yi-Fei, W.; Takeda, Y.; Matsui, H.; Kumaki, D.; Dos Santos, F.D.; Miyabo, A.; Tokito, S. Ferroelectric polymer-based fully printed flexible strain rate sensors and their application for human motion capture. Sens. Actuators A 2019, 295, 93–98. [Google Scholar] [CrossRef]
- Borghetti, M.; Sardini, E.; Serpelloni, M. Sensorized glove for measuring hand finger flexion for rehabilitation purposes. IEEE Trans. Instrum. Meas. 2013, 62, 3308–3314. [Google Scholar] [CrossRef]
- Wise, S.; Gardner, W.; Sabelman, E.; Valainis, E.; Wong, Y.; Glass, K.; Drace, J.; Rosen, J.M. Evaluation of a fiber optic glove for se-automated goniometric measurements. J. Rehabil. Res. Dev. 1990, 27, 411–424. [Google Scholar] [CrossRef]
- Najafi, B.; Aminian, K.; Paraschiv-Ionescu, A.; Loew, F.; Bula, C.J.; Robert, P. Ambulatory system for human motion analysis using a kinematic sensor: Monitoring of daily physical activity in the elderly. IEEE Trans. Biomed. Eng. 2003, 50, 711–723. [Google Scholar] [CrossRef]
- Balogun, J.A.; Amusa, L.O.; Onyewadume, I.U. Factors affecting Caltrac® and Calcount® accelerometer output. Phys. Ther. 1988, 68, 1500–1504. [Google Scholar]
- Forner-Cordero, A.; Mateu-Arce, M.; Forner-Cordero, I.; Alcántara, E.; Moreno, J.; Pons, J.L. Study of the motion artefacts of skin-mounted inertial sensors under different attachment conditions. Physiol. Meas. 2008, 29, N21. [Google Scholar] [CrossRef]
- Gajdosik, R.L.; Bohannon, R.W. Clinical measurement of range of motion review of goniometry emphasizing reliability and validity. Phys. Ther. 1987, 67, 1867–1872. [Google Scholar] [CrossRef] [PubMed]
- Hill, K.; Fujii, Y.; Johnson, D.C.; Kawasaki, B. Photosensitivity in optical fiber waveguides: Application to reflection filter fabrication. Appl. Phys. Lett. 1978, 32, 647–649. [Google Scholar] [CrossRef]
- Erdogan, T. Fiber grating spectra. J. Lightwave Technol. 1997, 15, 1277–1294. [Google Scholar] [CrossRef] [Green Version]
- Kuang, K.; Kenny, R.; Whelan, M.; Cantwell, W.; Chalker, P. Embedded fibre bragg grating sensors in advanced composite materials. Compos. Sci. Technol. 2001, 61, 1379–1387. [Google Scholar] [CrossRef]
- Trutzel, M.N.P.; Wauer, K.; Betz, D.; Staudigel, L.; Krumpholz, O.; Muehlmann, H.-C.; Muellert, T.; Gleine, W. Smart sensing of aviation structures with fiber optic bragg grating sensors. In Proceedings of the Smart Structures and Materials 2000: Sensory Phenomena and Measurement Instrumentation for Smart Structures and Materials, Newport Beach, CA, USA, 6–9 March 2000; pp. 134–143. [Google Scholar]
- Hopf, B.; Koch, A.W.; Roths, J. Temperature dependence of glue-induced birefringence in surface-attached FBG strain sensors. J. Lightwave Technol. 2015, 34, 1220–1227. [Google Scholar] [CrossRef]
- Ramalingam, R.K.; Nast, R.; Neumann, H. Fiber bragg grating sensors for distributed torsional strain measurements in a (RE) BCO tape. IEEE Sens. J. 2014, 15, 2023–2030. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, W.; Zhang, H.; Liu, B.; Zhao, J.; Tu, Q.; Kai, G.; Dong, X. An embedded FBG sensor for simultaneous measurement of stress and temperature. IEEE Photonics Technol. Lett. 2005, 18, 154–156. [Google Scholar] [CrossRef]
- Betz, D.C.; Thursby, G.; Culshaw, B.; Staszewski, W.J. Advanced layout of a fiber bragg grating strain gauge rosette. J. Lightwave Technol. 2006, 24, 1019–1026. [Google Scholar] [CrossRef]
- Basumallick, N.; Chatterjee, I.; Biswas, P.; Dasgupta, K.; Bandyopadhyay, S. Fiber bragg grating accelerometer with enhanced sensitivity. Sens. Actuators A 2012, 173, 108–115. [Google Scholar] [CrossRef]
- He, Y.; Zhang, X.; Zhu, L.; Sun, G.; Lou, X.; Dong, M. Optical Fiber Sensor Performance Evaluation in Soft Polyimide Film with Different Thickness Ratios. Sensors 2019, 19, 790. [Google Scholar] [CrossRef] [Green Version]
- Ge, J.; James, A.E.; Xu, L.; Chen, Y.; Kwok, K.W.; Fok, M.P. Bidirectional Soft Silicone Curvature Sensor Based on Off-Centered Embedded Fiber bragg Grating. IEEE Photonics Technol. Lett. 2016, 28, 2237–2240. [Google Scholar] [CrossRef]
- Park, Y.P.; Lee, J.; Bae, J. Development of a Finger Motion Measurement System using Linear Potentiometers. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; pp. 125–130. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Finger Type | Sensor Length | Node Length (Distance) | Wavelength Range (Period) | Number of Nodes |
|---|---|---|---|---|
| Index Finger | 155 mm | 3 mm (19 mm) | 1532.0~1562.4 nm (3.8 nm) | 9 |
| Middle Finger | 155 mm | 1532.0~1562.4 nm (3.8 nm) | 9 | |
| Ring Finger | 155 mm | 1532.0~1562.4 nm (3.8 nm) | 9 | |
| Little Finger | 125 mm | 1576.0~1600.0 nm (4.0 nm) | 7 | |
| Thumb | 85 mm | 1584.0~1600.0 nm (4.0 nm) | 5 |
| Subject | Investigated Value |
|---|---|
| Number of People | 11 |
| Age Range | 26~48 |
| Index~Little Finger Length | 105 ± 11.4 mm |
| Thumb Length | 75 ± 4.5 mm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.S.; Kim, B.K.; Jang, M.; Kang, K.; Kim, D.E.; Ju, B.-K.; Kim, J. Wearable Hand Module and Real-Time Tracking Algorithms for Measuring Finger Joint Angles of Different Hand Sizes with High Accuracy Using FBG Strain Sensor. Sensors 2020, 20, 1921. https://0-doi-org.brum.beds.ac.uk/10.3390/s20071921
Kim JS, Kim BK, Jang M, Kang K, Kim DE, Ju B-K, Kim J. Wearable Hand Module and Real-Time Tracking Algorithms for Measuring Finger Joint Angles of Different Hand Sizes with High Accuracy Using FBG Strain Sensor. Sensors. 2020; 20(7):1921. https://0-doi-org.brum.beds.ac.uk/10.3390/s20071921
Chicago/Turabian StyleKim, Jun Sik, Byung Kook Kim, Minsu Jang, Kyumin Kang, Dae Eun Kim, Byeong-Kwon Ju, and Jinseok Kim. 2020. "Wearable Hand Module and Real-Time Tracking Algorithms for Measuring Finger Joint Angles of Different Hand Sizes with High Accuracy Using FBG Strain Sensor" Sensors 20, no. 7: 1921. https://0-doi-org.brum.beds.ac.uk/10.3390/s20071921