Robust Fine Registration of Multisensor Remote Sensing Images Based on Enhanced Subpixel Phase Correlation

 ,
,  , ,
, ,  , and
, and
Abstract
:1. Introduction
2. Related Work
2.1. Fine Registration Using Area-Based Methods
2.2. Phase Correlation
3. Enhanced Subpixel Phase Correlation
3.1. Workflow of the Enhanced Subpixel Method
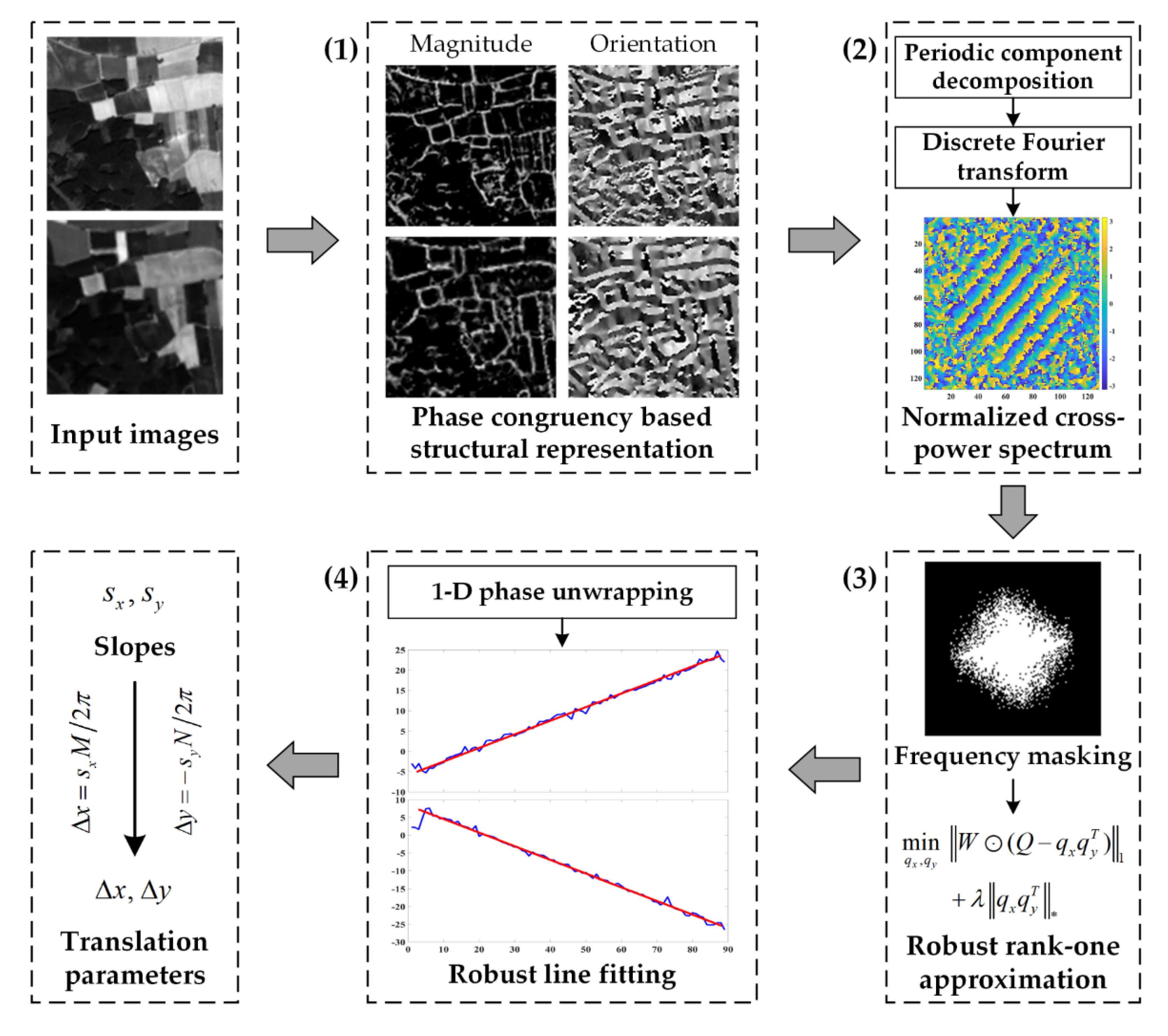
- (1)
- Construction of phase congruency-based structural representation. In order to minimize the influence of complicated intensity differences and emphasize the useful structural information for matching, we adopt the phase congruency [50] to generate a complex structural representation. The magnitude and orientation of the phase congruency features are combined to replace the original image intensity for the following image matching.
- (2)
- Calculation of normalized cross-power spectrum. The structural representations are transferred to the frequency domain using discrete FT. However, the periodicity of discrete FT induces the edge effect that affects the performance of PC. Therefore, we use an image decomposition algorithm [51] to extract the periodic component to eliminate the edge effects. Compared with the conventional windowing operation, this decomposition avoids narrowing the effective matching region and loss of image information [52]. The normalized cross-power spectrum matrix Q is then calculated as Equation (1).
- (3)
- Frequency masking and rank-one matrix approximation. In uncontrolled conditions, noise, aliasing, and other interference factors will contaminate the spectral components and degrade the following rank-one approximation and line fitting processing. In this case, we apply an adaptive frequency masking operation to filter out the corrupted frequency components [48]. Subsequently, two 1-D column vectors are factorized from the normalized cross-power spectrum matrix by determining the best rank-one approximation using a low-rank matrix approximation algorithm [53] which is robust to missing masked data and outliers.
- (4)
- Estimation of translation parameters. With the low-rank vectors obtained, the phase difference is separately extracted in each dimension after 1-D phase unwrapping. The correct slopes of the unwrapped phase angles are identified by a robust estimation algorithm using higher than minimal subset sampling [54] in the presence of residual outliers, and finally converted to the results of translation parameters according to , , where M and N denote the size of the input images.
3.2. Details of the Enhanced Subpixel Method
3.2.1. Phase Congruency-Based Structural Representation
3.2.2. Robust Rank-One Matrix Approximation with Adaptive Frequency Masking
3.2.3. Stable Robust Line Fitting
4. Multisensor Fine Registration
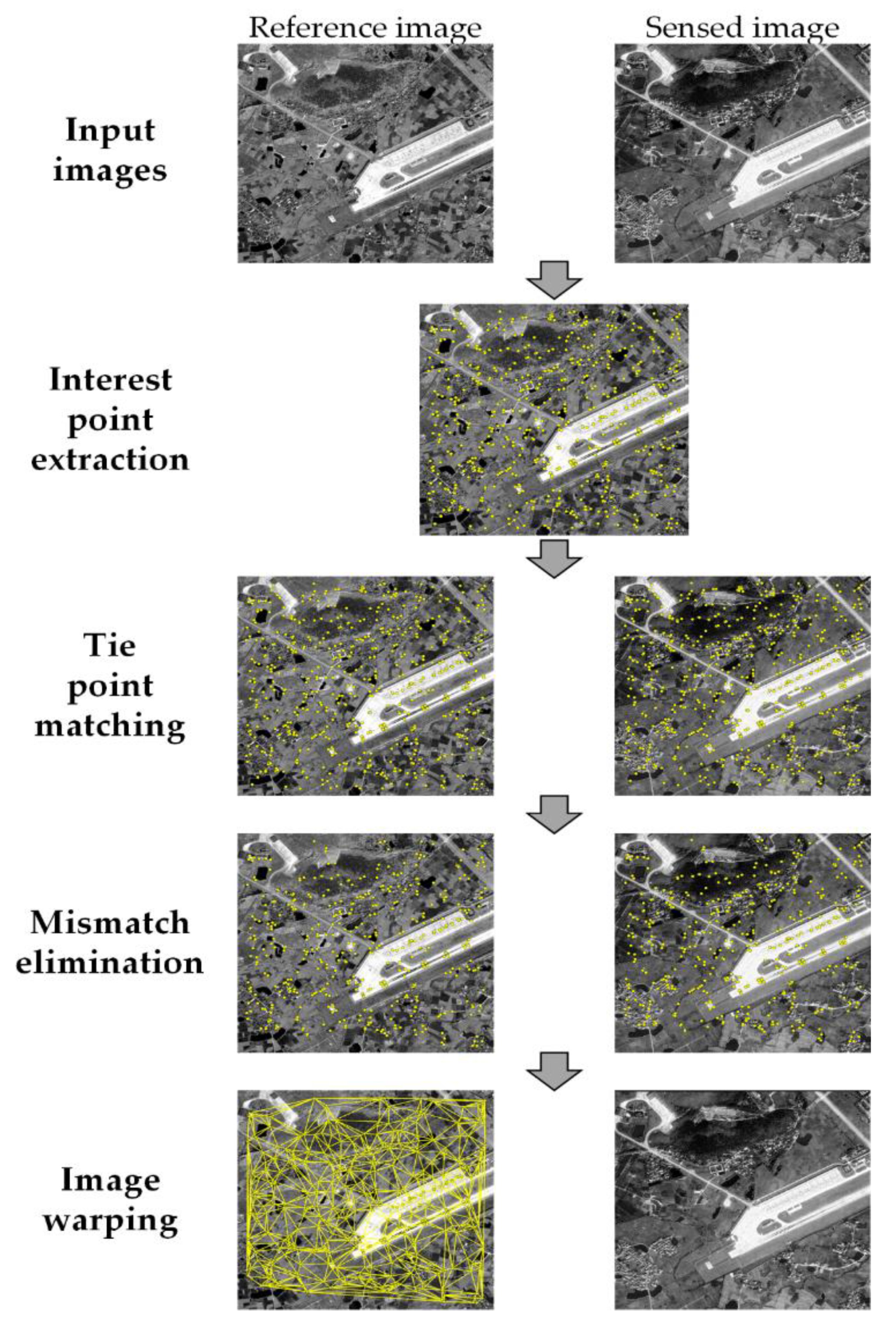
- (1)
- Interest point extraction. To improve the localization performance in the presence of complicated radiometric conditions, phase-congruency corner detector is applied to detect the interest points on the reference image. According to Equation (4), we can obtain a phase congruency map. The moment analysis is performed on the phase congruency maps with different orientations, and the minimum moment m is given by [59]:where is the phase congruency value determined at orientation angle . The minimum moment is equivalent to the cornerness measure. In order to extract the interest points uniformly distributed over the scene, a block-based strategy is adopted [19]. The image is partitioned into s × s nonoverlapping blocks, and the top h points with the largest minimum moment values are regarded as the interest points for each block.
- (2)
- Tie point matching. The corresponding points on the sensed image are determined by PC-based template matching. A template window is selected surrounding each interest point. The translation parameters between template windows are estimated by the pixel-level PC matching and then refined using the enhanced subpixel PC method. Note that the phase congruency calculated in the last step can be reused in the subpixel PC matching.
- (3)
- Mismatch elimination. There inevitably exist false matches in the results of tie point matching due to shadow and featureless areas. These mismatched tie points can be filtered by considering two aspects: the similarity measure and geometric consistency. The peak value of PC function provides a measure to assess the correctness of the match. The unreliable measurements with small PC peak values are firstly removed. Then, the residual outliers are eliminated by an iterative consistency check of tie points based on a global transformation [19]. In each iteration of consistency check, a transformation model is estimated using all the tie points with the transformation residuals calculated. The tie point with the largest residual is excluded, and the transformation model is estimated again on the remaining points. The procedure is repeated until the largest residual is less than a given threshold (e.g., 1.5 pixels). The three-order polynomial model is selected in this study since it can better handle the local deformations resulted from sensor error and terrain relief especially for high-resolution images.
- (4)
- Image warping. With the refined tie points, a transformation model that maps the sensed image to the reference image can be determined. We employ a piecewise linear model that is known to be appropriate for mitigating local geometric distortions between satellite images [60]. This function divides the image into triangular regions by the Delaunay’s triangulation algorithm using all the tie points, and estimates an affine transformation for each triangular region. For warping the regions outside the convex hull of the points, we estimate a global transformation model from the points defining the convex hull [61].
5. Experiments and Discussion
5.1. Tie Point Matching Experiment
5.1.1. Experimental Details
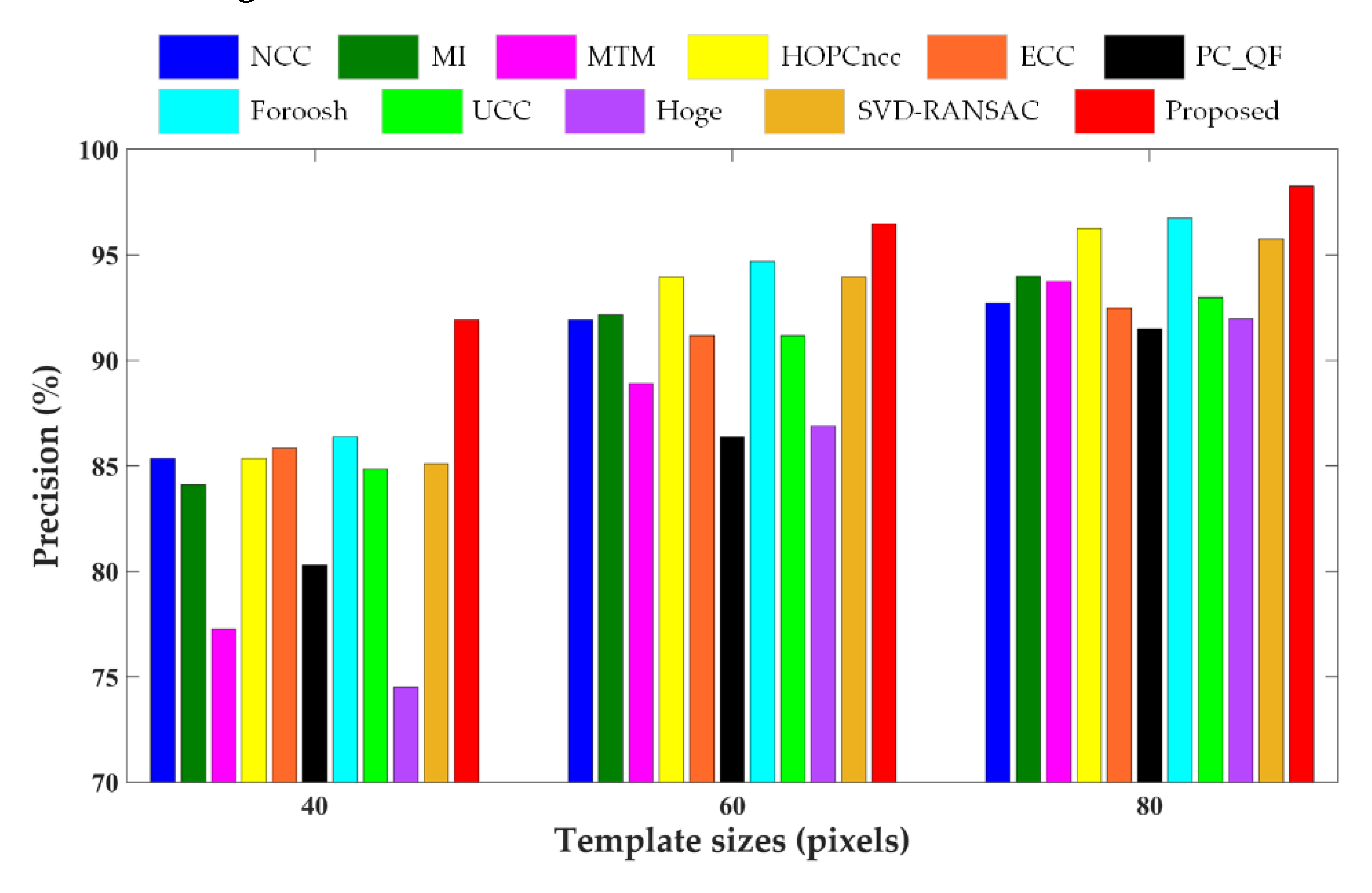
5.1.2. Results and Discussion
5.2. Fine Registration Experiment
5.2.1. Experimental Details
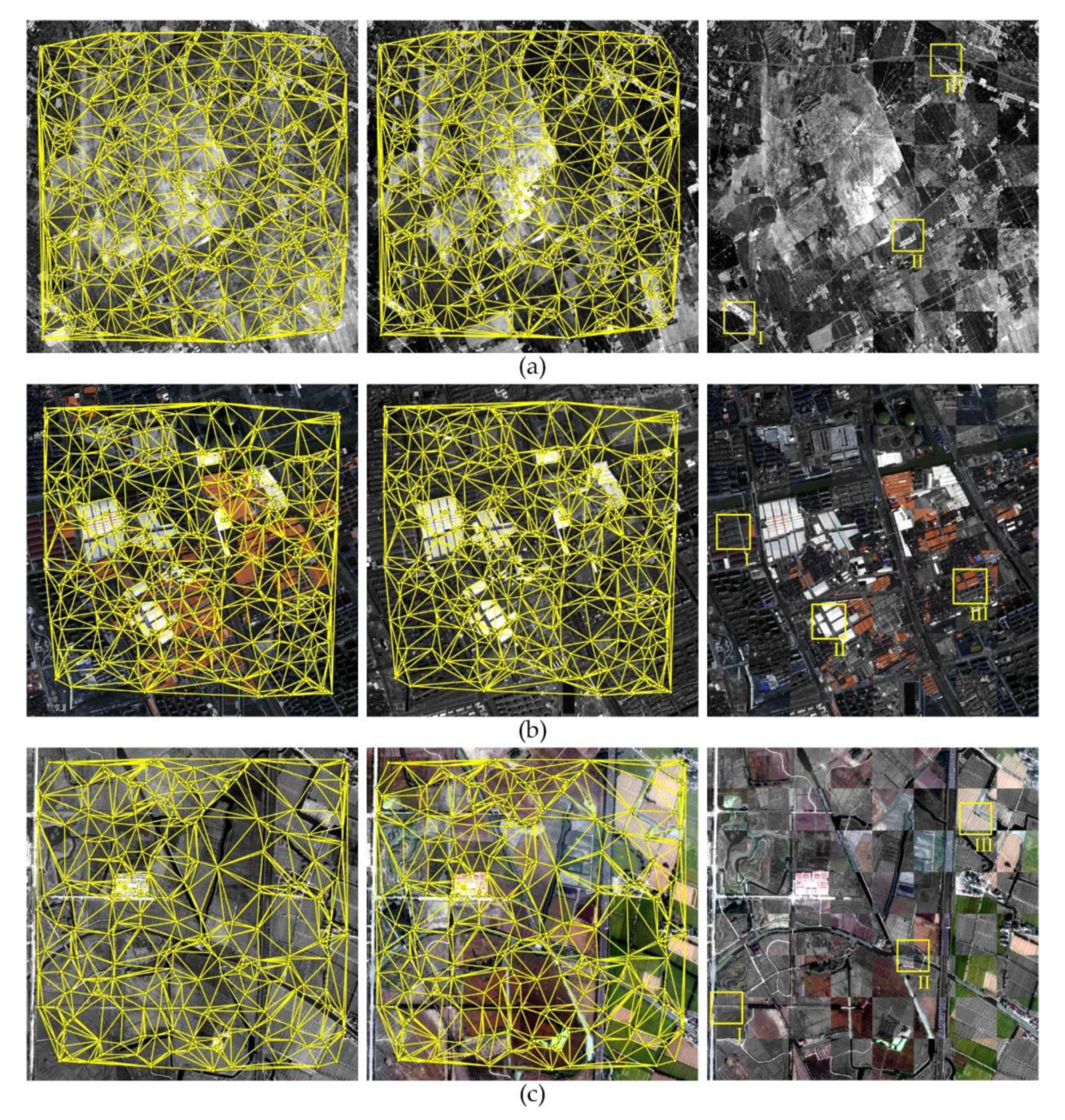
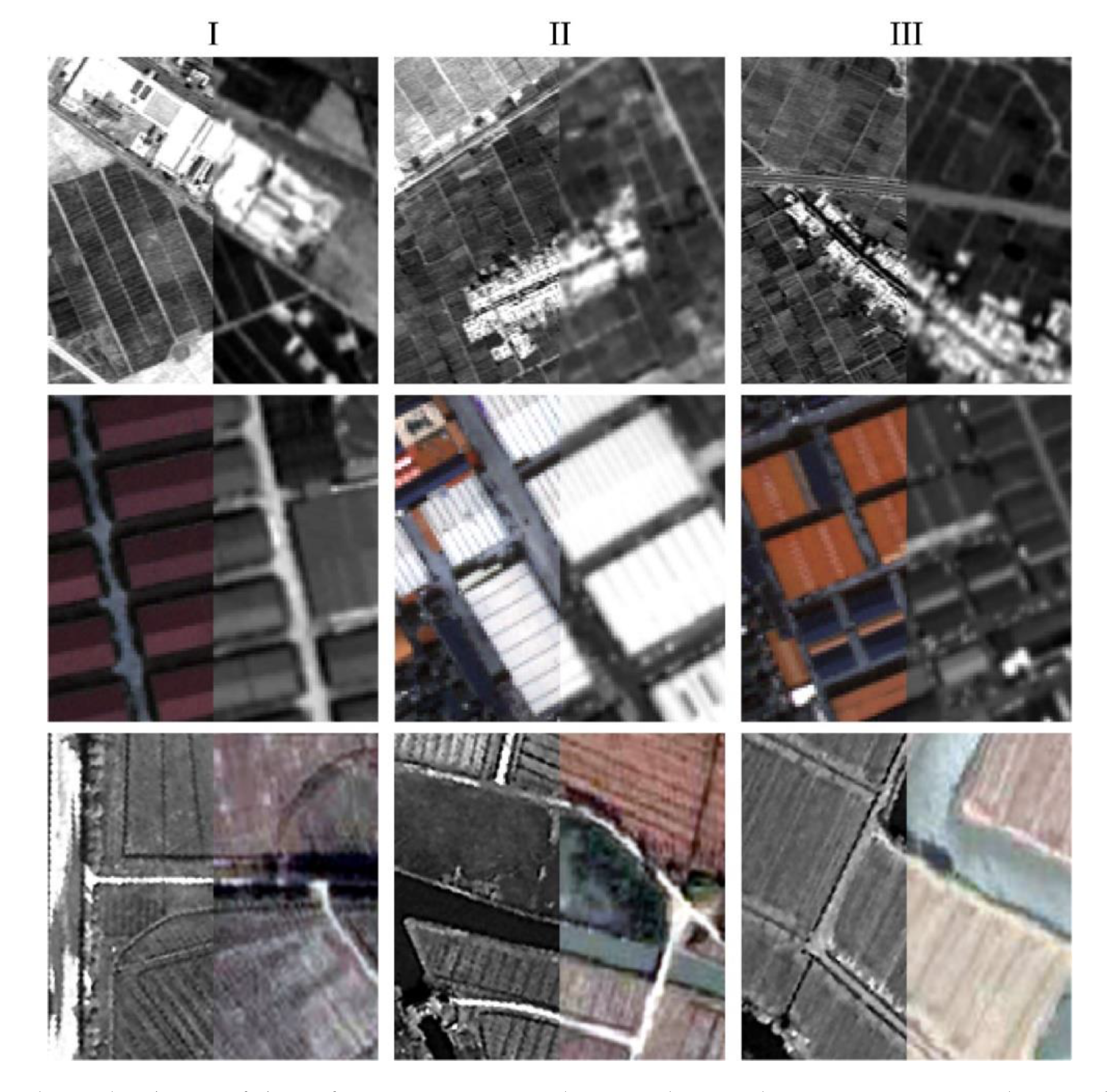
5.2.2. Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zitova, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef] [Green Version]
- Belward, A.S.; Skøien, J.O. Who launched what, when and why; trends in global land-cover observation capacity from civilian earth observation satellites. ISPRS J. Photogramm. Remote Sens. 2015, 103, 115–128. [Google Scholar] [CrossRef]
- Klaric, M.N.; Claywell, B.C.; Scott, G.J.; Hudson, N.J.; Sjahputera, O.; Li, Y.; Barratt, S.T.; Keller, J.M.; Davis, C.H. GeoCDX: An automated change detection and exploitation system for high-resolution satellite imagery. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2067–2086. [Google Scholar] [CrossRef]
- Chen, S.; Yuan, X.; Yuan, W.; Niu, J.; Xu, F.; Zhang, Y. Matching multi-sensor remote sensing images via an affinity tensor. Remote Sens. 2018, 10, 1104. [Google Scholar] [CrossRef] [Green Version]
- Stumpf, A.; Michéa, D.; Malet, J.-P. Improved co-registration of Sentinel-2 and Landsat-8 imagery for earth surface motion measurements. Remote Sens. 2018, 10, 160. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Choi, J.; Byun, Y.; Kim, Y. Parameter optimization for the extraction of matching points between high-resolution multisensor images in urban areas. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5612–5621. [Google Scholar] [CrossRef]
- Gong, M.; Zhao, S.; Jiao, L.; Tian, D.; Wang, S. A novel coarse-to-fine scheme for automatic image registration based on SIFT and mutual information. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4328–4338. [Google Scholar] [CrossRef]
- Li, H.; Man, Y. Robust multi-source image registration for optical satellite based on phase information. Photogramm. Eng. Remote Sens. 2016, 82, 865–878. [Google Scholar] [CrossRef]
- Ye, Y.; Shan, J.; Bruzzone, L.; Shen, L. Robust registration of multimodal remote sensing images based on structural similarity. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2941–2958. [Google Scholar] [CrossRef]
- Scheffler, D.; Hollstein, A.; Diedrich, H.; Segl, K.; Hostert, P. AROSICS: An automated and robust open-source image co-registration software for multi-sensor satellite data. Remote Sens. 2017, 9, 676. [Google Scholar] [CrossRef] [Green Version]
- Wong, A.; Clausi, D.A. ARRSI: Automatic registration of remote-sensing images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1483–1493. [Google Scholar] [CrossRef]
- Han, Y.; Bovolo, F.; Bruzzone, L. An approach to fine coregistration between very high resolution multispectral images based on registration noise distribution. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6650–6662. [Google Scholar] [CrossRef]
- Hu, H.; Ding, Y.; Zhu, Q.; Wu, B.; Xie, L.; Chen, M. Stable least-squares matching for oblique images using bound constrained optimization and a robust loss function. ISPRS J. Photogramm. Remote Sens. 2016, 118, 53–67. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Sedaghat, A.; Ebadi, H. Remote sensing image matching based on adaptive binning SIFT descriptor. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5283–5293. [Google Scholar] [CrossRef]
- Bellavia, F.; Colombo, C. Is there anything new to say about SIFT matching? Int. J. Comput. Vis. 2020, 128, 1847–1866. [Google Scholar] [CrossRef] [Green Version]
- Ye, Z.; Xu, Y.; Chen, H.; Zhu, J.; Tong, X.; Stilla, U. Area-based dense image matching with subpixel accuracy for remote sensing applications: Practical analysis and comparative study. Remote Sens. 2020, 12, 696. [Google Scholar] [CrossRef] [Green Version]
- Ye, Y.; Shan, J. A local descriptor based registration method for multispectral remote sensing images with non-linear intensity differences. ISPRS J. Photogramm. Remote Sens. 2014, 90, 83–95. [Google Scholar] [CrossRef]
- Tong, X.; Ye, Z.; Xu, Y.; Gao, S.; Xie, H.; Du, Q.; Liu, S.; Xu, X.; Liu, S.; Luan, K.; et al. Image registration with Fourier-based image correlation: A comprehensive review of developments and applications. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4062–4081. [Google Scholar] [CrossRef]
- Reddy, B.S.; Chatterji, B.N. An FFT-based technique for translation, rotation, and scale-invariant image registration. IEEE Trans. Image Process. 1996, 5, 1266–1271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, H.; Li, X.; Zhao, L.; Chen, S. A novel coarse-to-fine scheme for remote sensing image registration based on SIFT and phase correlation. Remote Sens. 2019, 11, 1833. [Google Scholar] [CrossRef] [Green Version]
- Dong, Y.; Jiao, W.; Long, T.; He, G.; Gong, C. An extension of phase correlation-based image registration to estimate similarity transform using multiple polar Fourier transform. Remote Sens. 2018, 10, 1719. [Google Scholar] [CrossRef] [Green Version]
- Feng, R.; Du, Q.; Li, X.; Shen, H. Robust registration for remote sensing images by combining and localizing feature- and area-based methods. ISPRS J. Photogramm. Remote Sens. 2019, 151, 15–26. [Google Scholar] [CrossRef]
- Lewis, J.P. Fast template matching. In Proceedings of the Vision Interface, Quebec City, QC, Canada, 15–19 May 1995; pp. 120–123. [Google Scholar]
- Le Moigne, J.; Netanyahu, N.S.; Eastman, R.D. Image Registration for Remote Sensing; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Viola, P.; Wells, W.M., III. Alignment by maximization of mutual information. Int. J. Comput. Vis. 1997, 24, 137–154. [Google Scholar] [CrossRef]
- Wang, F.; Vemuri, B.C. Non-rigid multi-modal image registration using cross-cumulative residual entropy. Int. J. Comput. Vis. 2007, 74, 201–215. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Li, X.; Liu, X.; Shen, H.; Shi, Q. Multimodal registration of remotely sensed images based on Jeffrey’s divergence. ISPRS J. Photogramm. Remote Sens. 2016, 122, 97–115. [Google Scholar] [CrossRef]
- Hel-Or, Y.; Hel-Or, H.; David, E. Matching by tone mapping: Photometric invariant template matching. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 317–330. [Google Scholar] [CrossRef]
- Suri, S.; Reinartz, P. Mutual-information-based registration of TerraSAR-X and Ikonos imagery in urban areas. IEEE Trans. Geosci. Remote Sens. 2010, 48, 939–949. [Google Scholar] [CrossRef]
- Hasan, M.; Pickering, M.R.; Jia, X. Robust automatic registration of multimodal satellite images using CCRE with partial volume interpolation. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4050–4061. [Google Scholar] [CrossRef]
- Li, K.; Zhang, Y.; Zhang, Z.; Lai, G. A coarse-to-fine registration strategy for multi-sensor images with large resolution differences. Remote Sens. 2019, 11, 470. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Li, X.; Zhao, L.; Yang, H. Medium-low resolution multisource remote sensing image registration based on SIFT and robust regional mutual information. Int. J. Remote Sens. 2018, 39, 3215–3242. [Google Scholar] [CrossRef]
- Lee, J.; Cai, X.; Schönlieb, C.; Coomes, D.A. Nonparametric image registration of airborne LiDAR, hyperspectral and photographic imagery of wooded landscapes. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6073–6084. [Google Scholar] [CrossRef]
- Fan, J.; Wu, Y.; Li, M.; Liang, W.; Cao, Y. SAR and optical image registration using nonlinear diffusion and phase congruency structural descriptor. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5368–5379. [Google Scholar] [CrossRef]
- Hao, M.; Jin, J.; Zhou, M.; Tian, Y.; Shi, W. Robust multisource remote sensing image registration method based on scene shape similarity. Photogramm. Eng. Remote Sens. 2019, 85, 725–736. [Google Scholar] [CrossRef]
- Xiong, X.; Xu, Q.; Jin, G.; Zhang, H.; Gao, X. Rank-based local self-similarity descriptor for optical-to-SAR image matching. IEEE Geosci. Remote Sens. Lett. 2020, 1–5. [Google Scholar] [CrossRef]
- Ye, Y.; Bruzzone, L.; Shan, J.; Bovolo, F.; Zhu, Q. Fast and robust matching for multimodal remote sensing image registration. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9059–9070. [Google Scholar] [CrossRef] [Green Version]
- Foroosh, H.; Zerubia, J.B.; Berthod, M. Extension of phase correlation to subpixel registration. IEEE Trans. Image Process. 2002, 11, 188–200. [Google Scholar] [CrossRef] [Green Version]
- Alba, A.; Vigueras-Gomez, J.F.; Arce-Santana, E.R.; Aguilar-Ponce, R.M. Phase correlation with sub-pixel accuracy: A comparative study in 1D and 2D. Comput. Vis. Image Understand. 2015, 137, 76–87. [Google Scholar] [CrossRef]
- Guizar-Sicairos, M.; Thurman, S.T.; Fienup, J.R. Efficient subpixel image registration algorithms. Opt. Lett. 2008, 33, 156–158. [Google Scholar] [CrossRef] [Green Version]
- Skakun, S.; Roger, J.-C.; Vermote, E.F.; Masek, J.G.; Justice, C.O. Automatic sub-pixel co-registration of Landsat-8 Operational Land Imager and Sentinel-2A Multi-Spectral Instrument images using phase correlation and machine learning based mapping. Int. J. Digit. Earth 2017, 10, 1253–1269. [Google Scholar] [CrossRef] [PubMed]
- Stone, H.S.; Orchard, M.T.; Chang, E.-C.; Martucci, S.A. A fast direct Fourier-based algorithm for subpixel registration of images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2235–2243. [Google Scholar] [CrossRef] [Green Version]
- Ye, Z.; Tong, X.; Xu, Y.; Gao, S.; Liu, S.; Xie, H.; Lu, W.; Liu, X. An improved subpixel phase correlation method with application in videogrammetric monitoring of shaking table tests. Photogramm. Eng. Remote Sens. 2018, 84, 579–592. [Google Scholar] [CrossRef]
- Hoge, W.S. A subspace identification extension to the phase correlation method [MRI application]. IEEE Trans. Med. Imag. 2003, 22, 277–280. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, B.; Wang, S.; Liu, E. Efficient subpixel registration for polarization-modulated 3D imaging. Opt. Express 2018, 26, 23040–23050. [Google Scholar] [CrossRef]
- Leprince, S.; Barbot, S.; Ayoub, F.; Avouac, J.-P. Automatic and precise orthorectification, coregistration, and subpixel correlation of satellite images, application to ground deformation measurements. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1529–1558. [Google Scholar] [CrossRef] [Green Version]
- Tong, X.; Ye, Z.; Xu, Y.; Liu, S.; Li, L.; Xie, H.; Li, T. A novel subpixel phase correlation method using singular value decomposition and unified random sample consensus. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4143–4156. [Google Scholar] [CrossRef]
- Kovesi, P. Image features from phase congruency. Videre J. Comp. Vis. Res. 1999, 1, 1–26. [Google Scholar]
- Moisan, L. Periodic plus smooth image decomposition. J. Math. Imaging Vis. 2011, 39, 161–179. [Google Scholar] [CrossRef] [Green Version]
- Dong, Y.; Jiao, W.; Long, T.; Liu, L.; He, G. Eliminating the effect of image border with image periodic decomposition for phase correlation based remote sensing image registration. Sensors 2019, 19, 2329. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Liu, G.; Sugimoto, S.; Yan, S.; Okutomi, M. Practical low-rank matrix approximation under robust L1-norm. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1410–1417. [Google Scholar]
- Tennakoon, R.B.; Bab-Hadiashar, A.; Cao, Z.; Hoseinnezhad, R.; Suter, D. Robust model fitting using higher than minimal subset sampling. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 350–362. [Google Scholar] [CrossRef] [PubMed]
- Wan, X.; Liu, J.G.; Li, S.; Yan, H. Phase correlation decomposition: The impact of illumination variation for robust subpixel remotely sensed image matching. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6710–6725. [Google Scholar] [CrossRef]
- Ye, Z.; Tong, X.; Zheng, S.; Guo, C.; Gao, S.; Liu, S.; Xu, X.; Jin, Y.; Xie, H.; Liu, S.; et al. Illumination-robust subpixel Fourier-based image correlation methods based on phase congruency. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1995–2008. [Google Scholar] [CrossRef]
- Dong, Y.; Long, T.; Jiao, W.; He, G.; Zhang, Z. A novel image registration method based on phase correlation using low-rank matrix factorization with mixture of Gaussian. IEEE Trans. Geosci. Remote Sens. 2018, 56, 446–460. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Li, J.; Hu, Q.; Ai, M. RIFT: Multi-modal image matching based on radiation-variation insensitive feature transform. IEEE Trans. Image Process. 2020, 29, 3296–3310. [Google Scholar] [CrossRef]
- Han, Y.; Kim, T.; Yeom, J. Improved piecewise linear transformation for precise warping of very-high-resolution remote sensing images. Remote Sens. 2019, 11, 2235. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Byun, Y.; Choi, J.; Han, D.; Kim, Y. Automatic registration of high-resolution images using local properties of features. Photogramm. Eng. Remote Sens. 2012, 78, 211–221. [Google Scholar] [CrossRef]
- Evangelidis, G.D.; Psarakis, E.Z. Parametric image alignment using enhanced correlation coefficient maximization. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1858–1865. [Google Scholar] [CrossRef] [Green Version]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Zhu, Q.; Wu, B.; Xu, Z.-X. Seed point selection method for triangle constrained image matching propagation. IEEE Geosci. Remote Sens. Lett. 2006, 3, 207–211. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data No. | Image Sources | Size | Sensor Resolution | Date | Location |
|---|---|---|---|---|---|
| 1 | ZiYuan-3 PAN | 1920 × 1980 | 2.1 m | 2012/02 | Dengfeng, Henan, China |
| THEOS PAN | 1990 × 1992 | 2 m | 2011/12 | ||
| 2 | Sentinel-2 MSI Band 3 | 1800 × 1800 | 10 m | 2015/08 | Munich, Germany |
| Landsat 8 OLI Band 8 | 1805 × 1805 | 15 m | 2014/06 | ||
| 3 | Mapping-1 PAN | 1720 × 1720 | 5 m | 2013/05 | Dengfeng, Henan, China |
| ZiYuan-3 MUX Band 3 | 1725 × 1725 | 5.8 m | 2012/02 |
| Criterion | Hoge | Variant 1 | Variant 2 | Proposed | |
|---|---|---|---|---|---|
| 40 | Precision | 53.38% | 56.14% | 63.16% | 64.66% |
| RMSE | 2.928 | 2.631 | 2.245 | 2.147 | |
| 60 | Precision | 60.9% | 63.91% | 68.92% | 70.43% |
| RMSE | 2.436 | 2.193 | 1.813 | 1.693 | |
| 80 | Precision | 63.25% | 66% | 70% | 71% |
| RMSE | 2.032 | 1.912 | 1.641 | 1.607 | |
| No. | Template Size | NCC | MI | MTM | HOPCncc | ECC | PC_QF | Foroosh | UCC | Hoge | SVD-RANSAC | Proposed | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Data 1 | 40 | CM | 0.756 | 0.775 | 0.762 | 0.788 | 0.759 | 0.813 | 0.800 | 0.749 | 0.802 | 0.783 | 0.775 |
| TM | 3.477 | 3.705 | 3.446 | 2.266 | 4.344 | 3.695 | 4.408 | 4.421 | 2.928 | 2.379 | 2.147 | ||
| 60 | CM | 0.754 | 0.738 | 0.732 | 0.750 | 0.787 | 0.783 | 0.790 | 0.749 | 0.765 | 0.750 | 0.755 | |
| TM | 2.977 | 2.907 | 2.256 | 1.842 | 4.135 | 2.811 | 3.036 | 3.555 | 2.436 | 1.825 | 1.693 | ||
| 80 | CM | 0.780 | 0.735 | 0.743 | 0.752 | 0.782 | 0.757 | 0.765 | 0.752 | 0.766 | 0.753 | 0.748 | |
| TM | 2.247 | 2.186 | 2.146 | 1.591 | 3.652 | 2.483 | 2.158 | 2.988 | 2.032 | 1.659 | 1.607 | ||
| Data 2 | 40 | CM | 0.404 | 0.429 | 0.408 | 0.424 | 0.406 | 0.431 | 0.465 | 0.391 | 0.376 | 0.392 | 0.385 |
| TM | 3.435 | 2.970 | 2.597 | 0.732 | 3.903 | 2.340 | 2.649 | 3.875 | 1.808 | 0.914 | 0.822 | ||
| 60 | CM | 0.405 | 0.409 | 0.401 | 0.414 | 0.413 | 0.405 | 0.462 | 0.383 | 0.371 | 0.377 | 0.369 | |
| TM | 3.154 | 2.752 | 1.711 | 0.461 | 3.352 | 2.103 | 1.846 | 3.711 | 1.497 | 0.744 | 0.558 | ||
| 80 | CM | 0.388 | 0.401 | 0.396 | 0.377 | 0.407 | 0.397 | 0.460 | 0.363 | 0.359 | 0.359 | 0.350 | |
| TM | 2.418 | 1.998 | 1.307 | 0.383 | 3.205 | 1.977 | 1.309 | 3.587 | 0.942 | 0.457 | 0.358 | ||
| Data 3 | 40 | CM | 0.425 | 0.469 | 0.466 | 0.492 | 0.447 | 0.456 | 0.450 | 0.421 | 0.409 | 0.434 | 0.389 |
| TM | 1.608 | 1.983 | 3.062 | 0.998 | 1.619 | 2.540 | 2.631 | 2.345 | 2.113 | 1.760 | 1.218 | ||
| 60 | CM | 0.408 | 0.427 | 0.410 | 0.459 | 0.400 | 0.442 | 0.430 | 0.395 | 0.380 | 0.409 | 0.381 | |
| TM | 1.044 | 0.977 | 1.603 | 0.586 | 1.127 | 1.920 | 1.091 | 1.524 | 1.215 | 0.685 | 0.702 | ||
| 80 | CM | 0.380 | 0.414 | 0.387 | 0.442 | 0.386 | 0.418 | 0.415 | 0.376 | 0.374 | 0.382 | 0.361 | |
| TM | 0.671 | 0.566 | 0.543 | 0.498 | 1.054 | 1.201 | 0.512 | 1.248 | 0.874 | 0.470 | 0.396 | ||
| Data No. | Image Sources | Size | Sensor Resolution | Date | Location |
|---|---|---|---|---|---|
| 1 | SPOT-5 PAN | 1750 × 1700 | 5 m | 2013/06 | Zhangye, Gansu, China |
| Sentinel-2 MSI Band 3 | 1791 × 1716 | 10 m | 2015/08 | ||
| 2 | GeoEye-1 RGB | 1040 × 1010 | 2 m | 2010/02 | Shanghai, China |
| ZiYuan-3 PAN | 1044 × 1011 | 2.1 m | 2013/07 | ||
| 3 | Hongqi-1-H9 PAN | 2120 × 2140 | 0.75 m | 2020/02 | Shanghai, China |
| Google earth | 2124 × 2148 | 1.19 m | 2019/10 |
| No. | Criterion | SIFT | ORB | RIFT | HOPCncc | SVD-RANSAC | Proposed |
|---|---|---|---|---|---|---|---|
| Data 1 | RN/TN | 1538/2689 | 1312/2121 | 502/1403 | 669/711 | 657/711 | 662/711 |
| DQ | 2.648 | 3.911 | 1.4231 | 0.841 | 0.855 | 0.852 | |
| RMSE | 0.918 | 0.898 | 1.227 | 0.527 | 0.520 | 0.494 | |
| STD | 0.471 | 0.422 | 0.571 | 0.290 | 0.284 | 0.272 | |
| Data 2 | RN/TN | 178/865 | 456/1306 | 332/1040 | 498/600 | 486/600 | 495/600 |
| DQ | 1.684 | 2.437 | 1.083 | 0.882 | 0.816 | 0.821 | |
| RMSE | 1.361 | 1.480 | 1.220 | 0.691 | 0.686 | 0.642 | |
| STD | 0.695 | 0.797 | 0.572 | 0.341 | 0.347 | 0.330 | |
| Data 3 | RN/TN | 56/849 | 67/565 | 165/907 | 391/713 | 378/713 | 399/713 |
| DQ | 1.652 | 2.127 | 1.167 | 1.152 | 1.196 | 1.131 | |
| RMSE | 1.894 | 1.822 | 1.538 | 0.771 | 0.809 | 0.711 | |
| STD | 0.709 | 0.837 | 0.695 | 0.375 | 0.366 | 0.351 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, Z.; Kang, J.; Yao, J.; Song, W.; Liu, S.; Luo, X.; Xu, Y.; Tong, X. Robust Fine Registration of Multisensor Remote Sensing Images Based on Enhanced Subpixel Phase Correlation. Sensors 2020, 20, 4338. https://0-doi-org.brum.beds.ac.uk/10.3390/s20154338
Ye Z, Kang J, Yao J, Song W, Liu S, Luo X, Xu Y, Tong X. Robust Fine Registration of Multisensor Remote Sensing Images Based on Enhanced Subpixel Phase Correlation. Sensors. 2020; 20(15):4338. https://0-doi-org.brum.beds.ac.uk/10.3390/s20154338
Chicago/Turabian StyleYe, Zhen, Jian Kang, Jing Yao, Wenping Song, Sicong Liu, Xin Luo, Yusheng Xu, and Xiaohua Tong. 2020. "Robust Fine Registration of Multisensor Remote Sensing Images Based on Enhanced Subpixel Phase Correlation" Sensors 20, no. 15: 4338. https://0-doi-org.brum.beds.ac.uk/10.3390/s20154338