On the Identification of Sectional Deformation Modes of Thin-Walled Structures with Doubly Symmetric Cross-Sections Based on the Shell-Like Deformation


Abstract
:1. Introduction
2. One-Dimensional Formulation
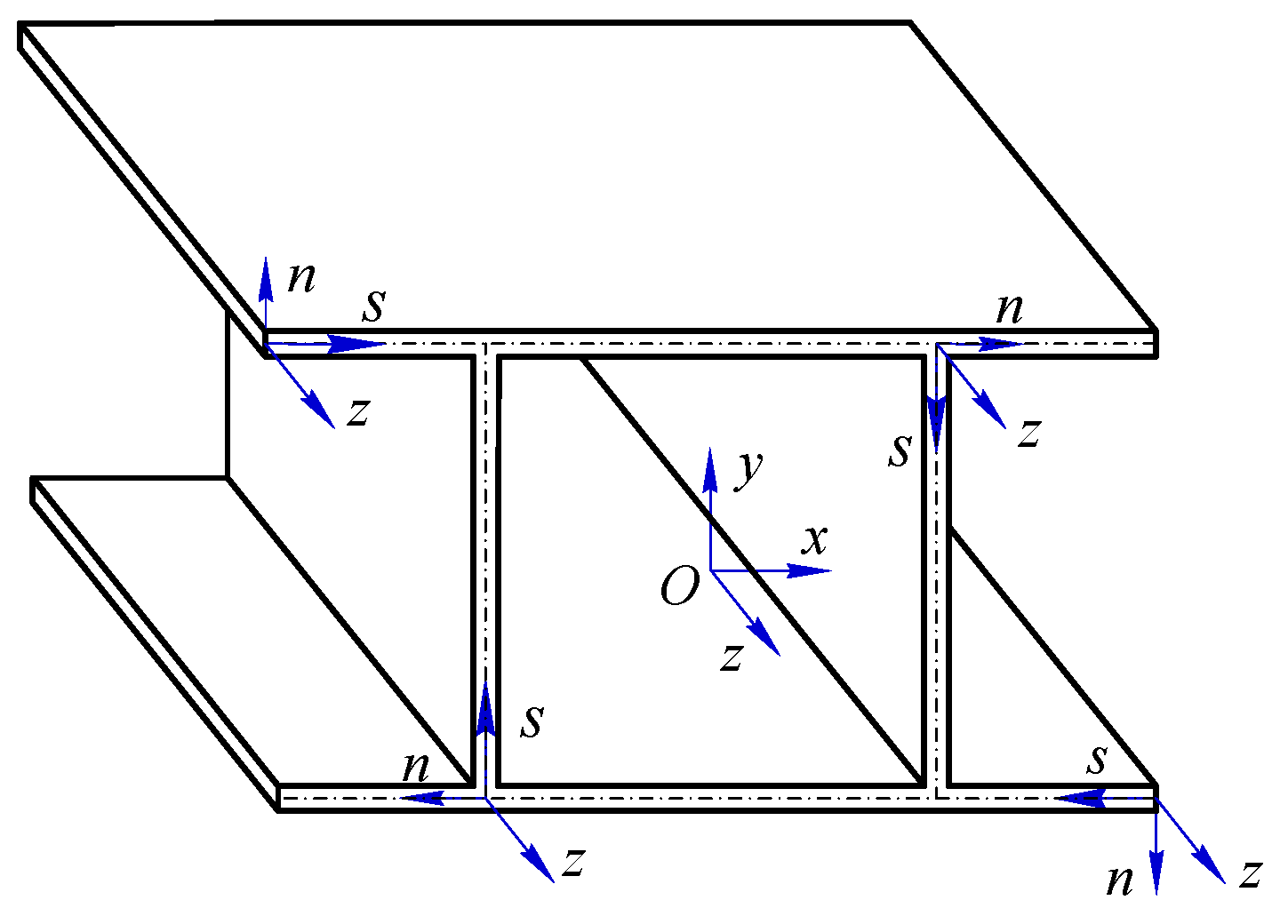
2.1. Displacement Fields
2.2. Strain and Stress Fields
2.3. Beam Governing Equations
3. Higher-Order Deformation Modes
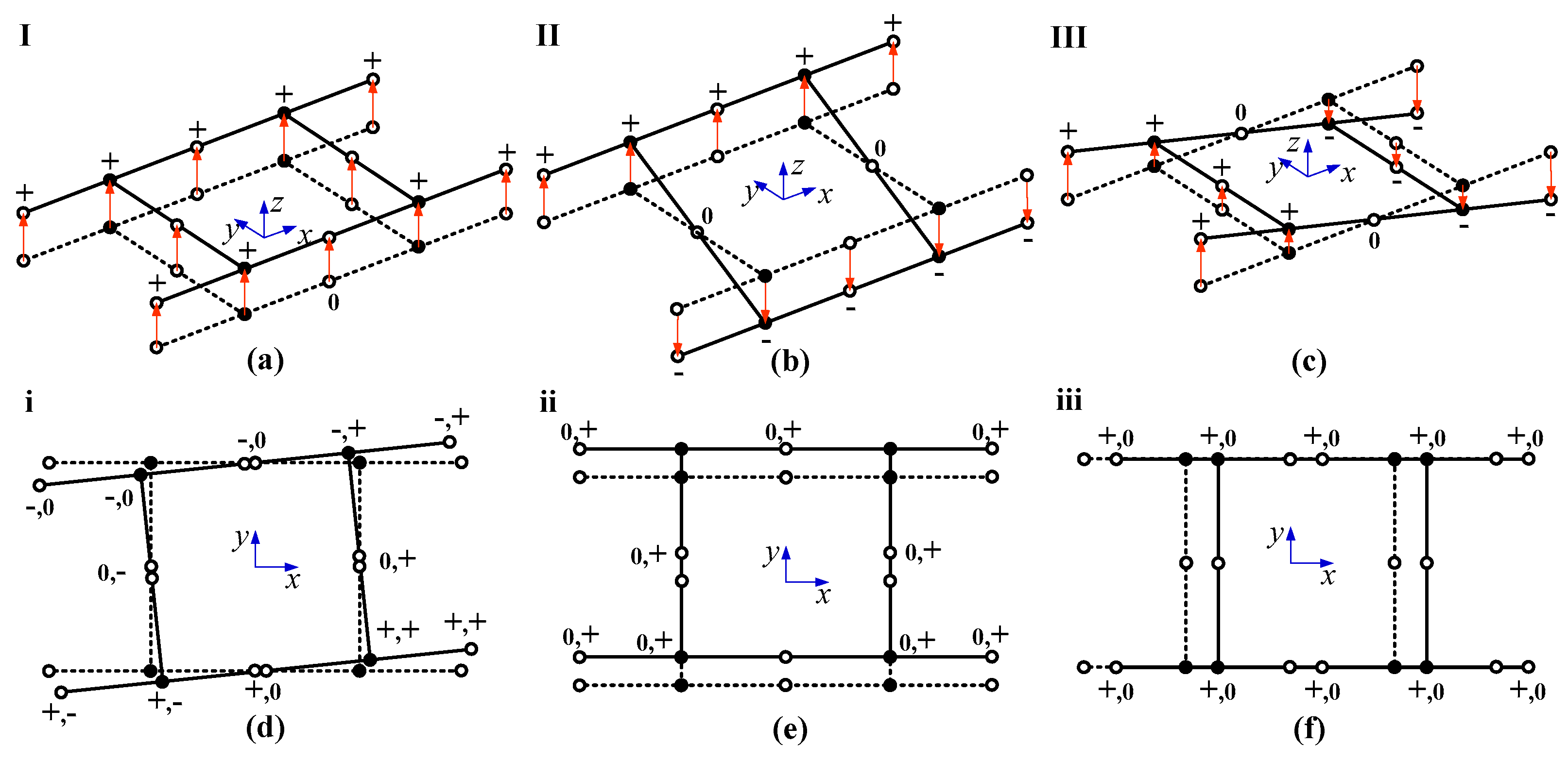
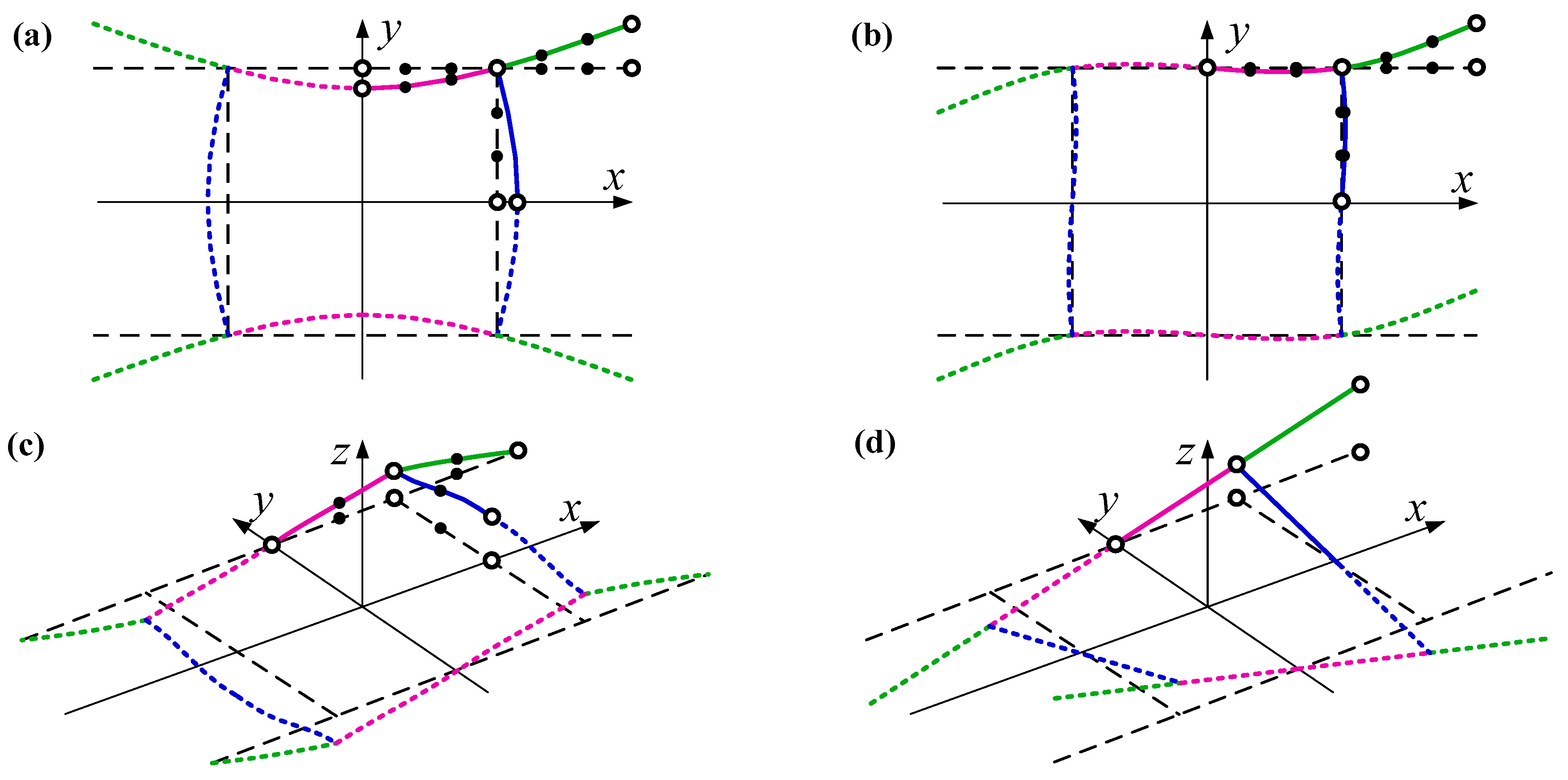
3.1. Shell-Like Deformation
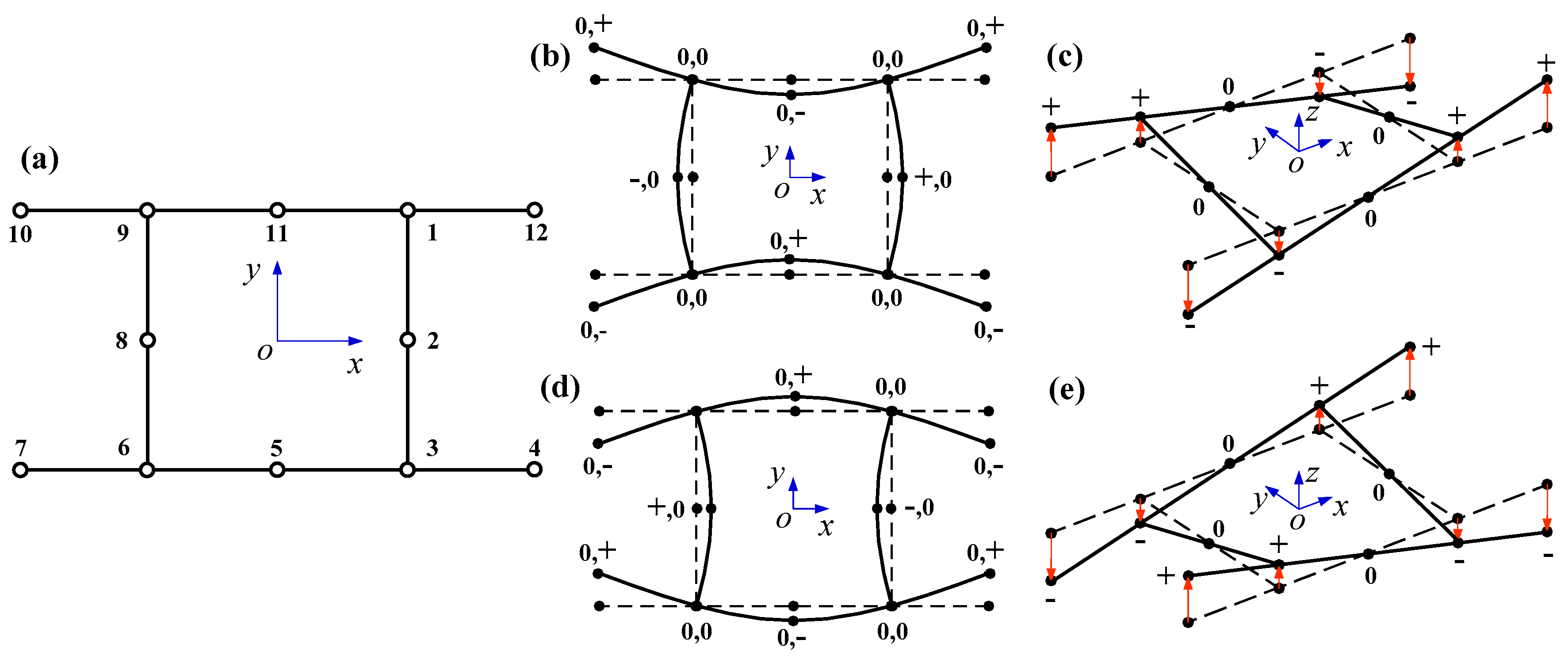
3.2. Benchmark Points
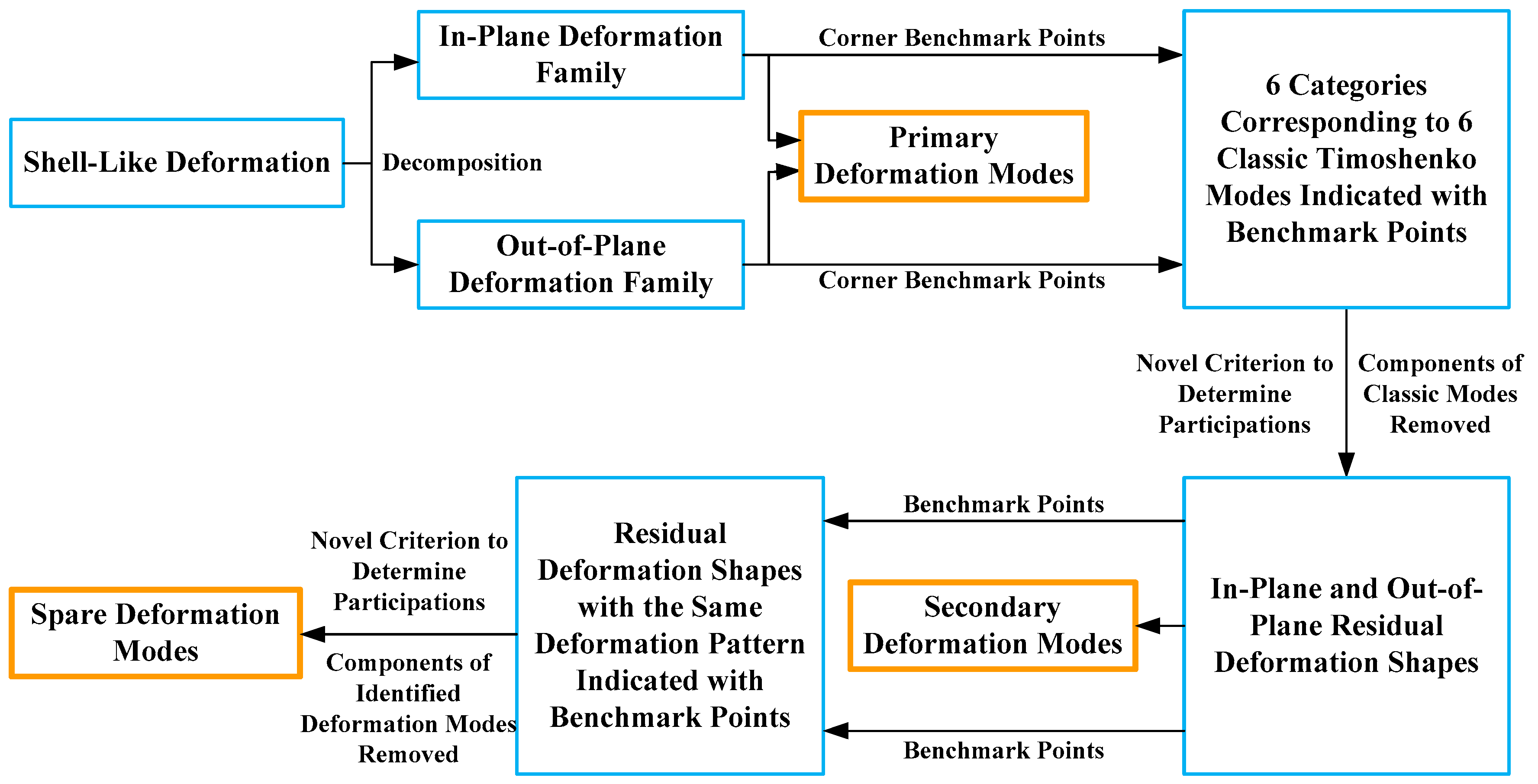
3.3. Identification of Deformation Modes
3.3.1. Uncoupling Deformation Modes with a Novel Criterion
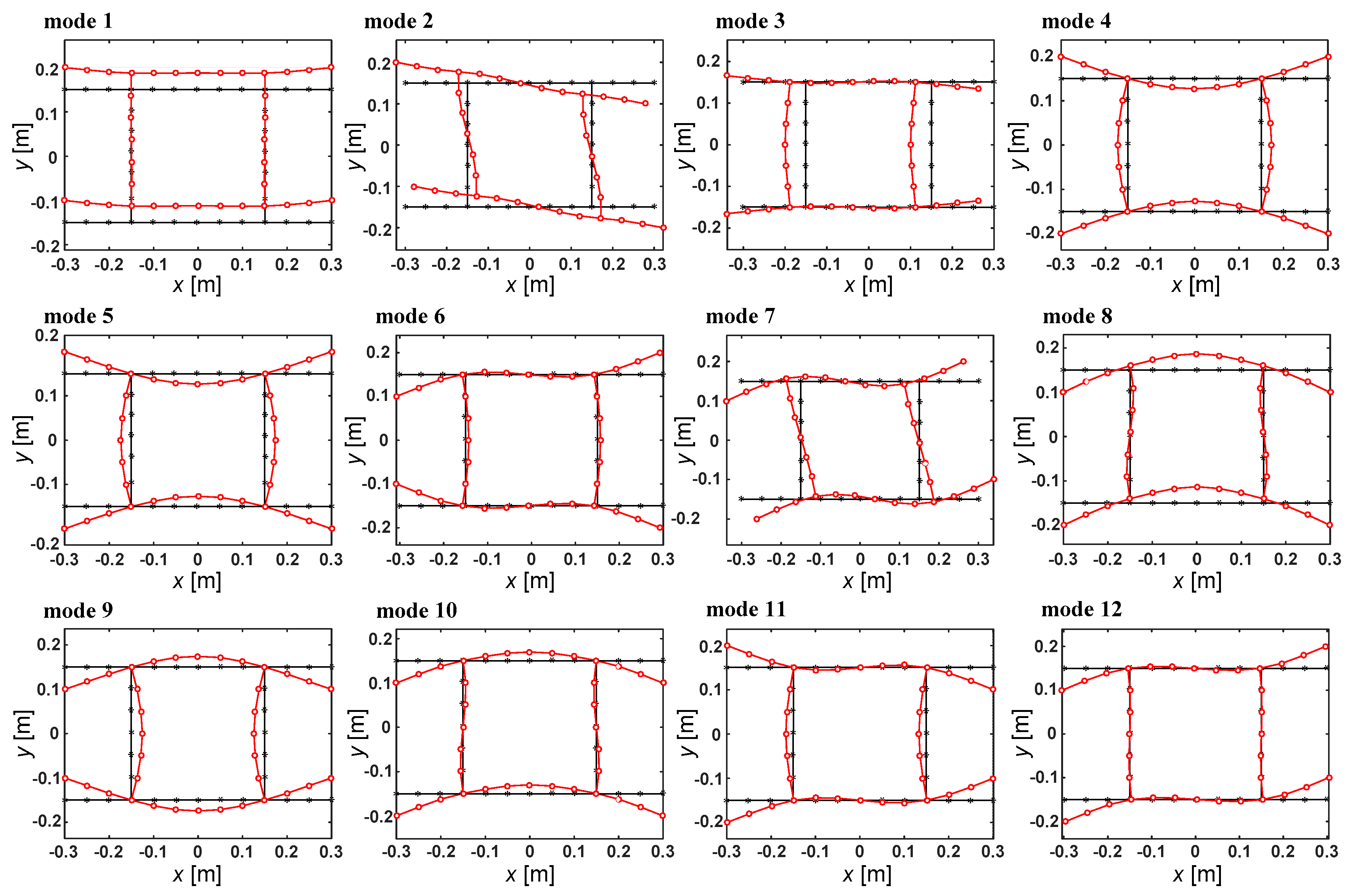
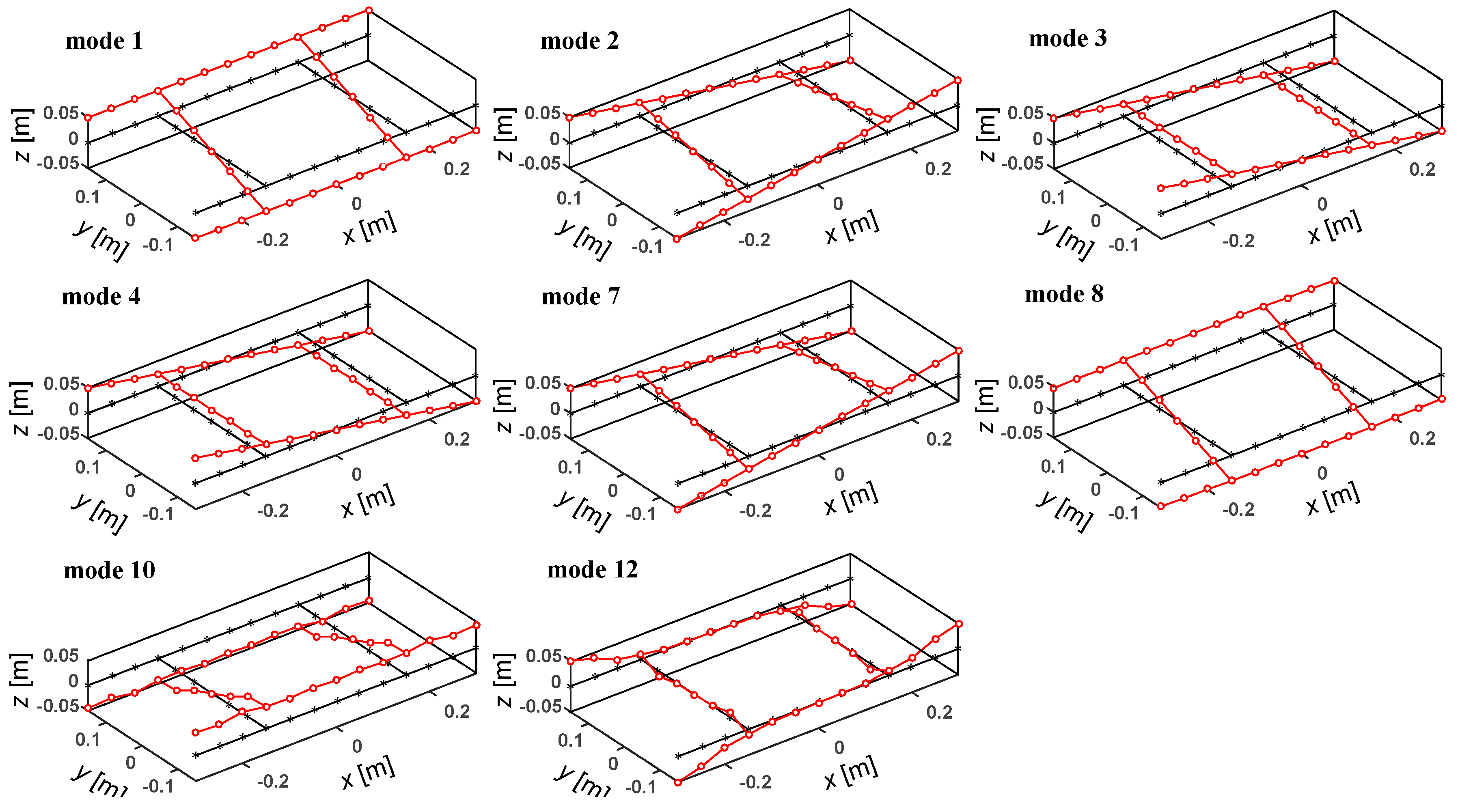
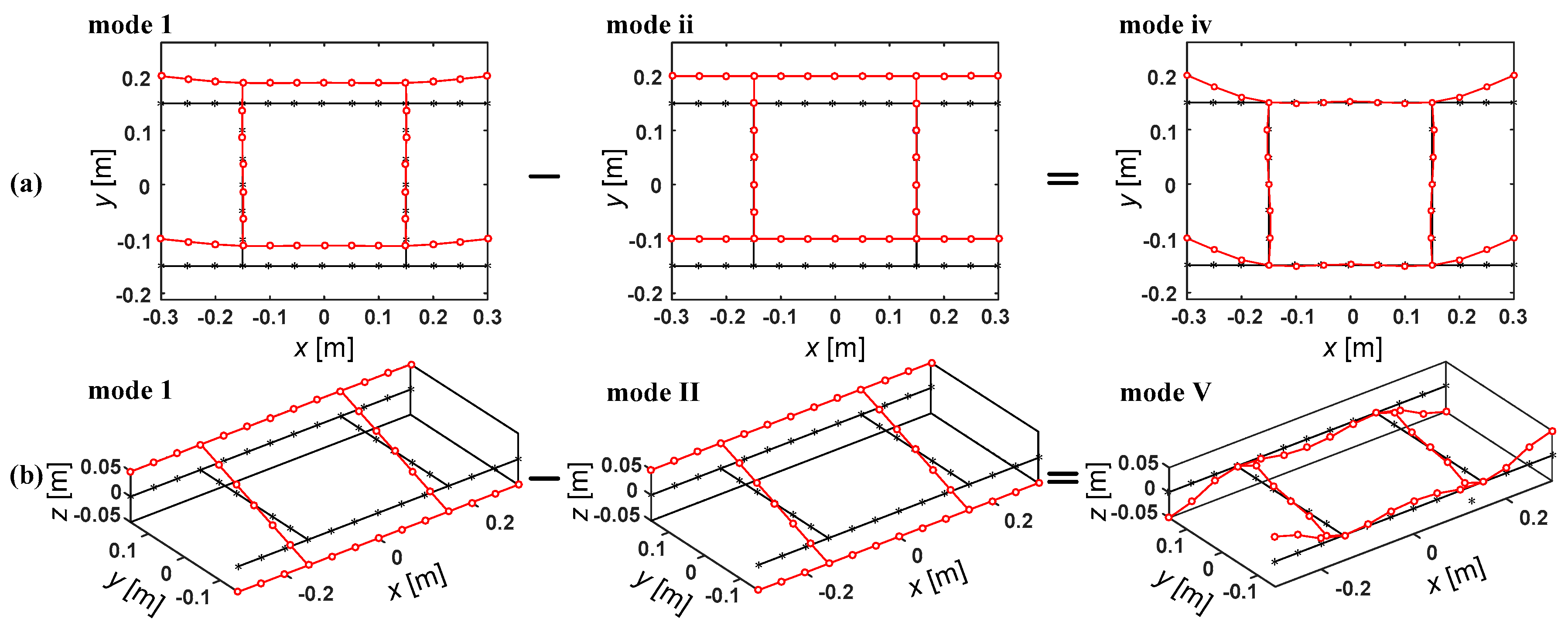
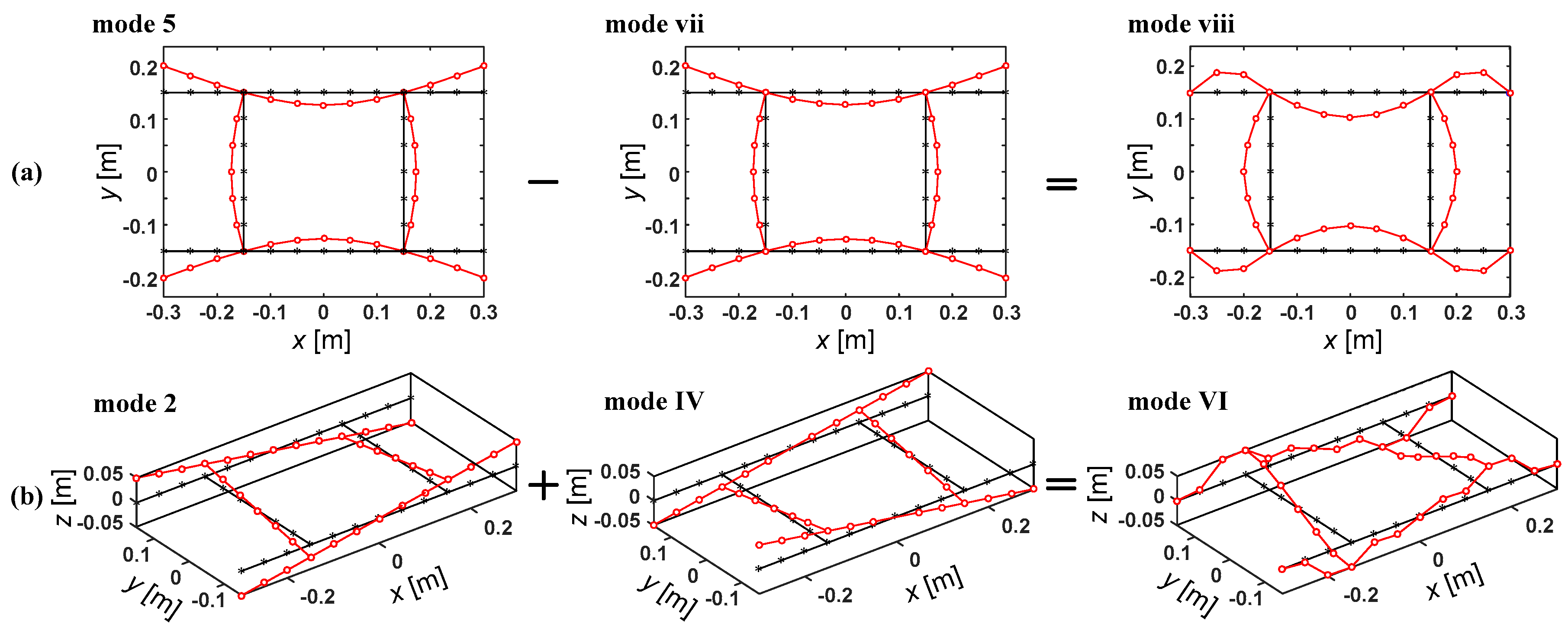
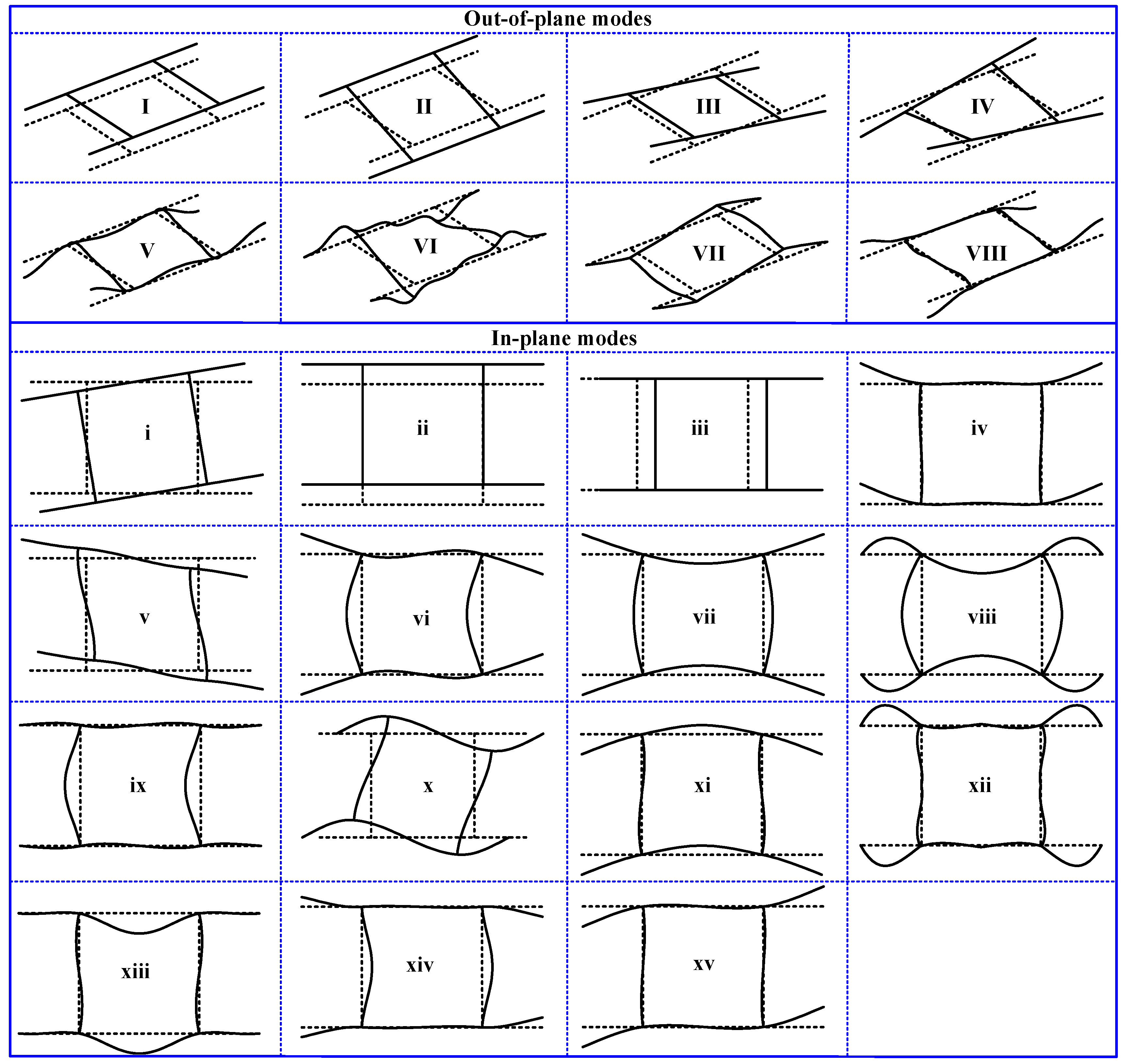
3.3.2. Higher-Order Deformation Modes
3.3.3. Shape Functions of Sectional Deformation Modes
4. Applications and Illustrative Examples
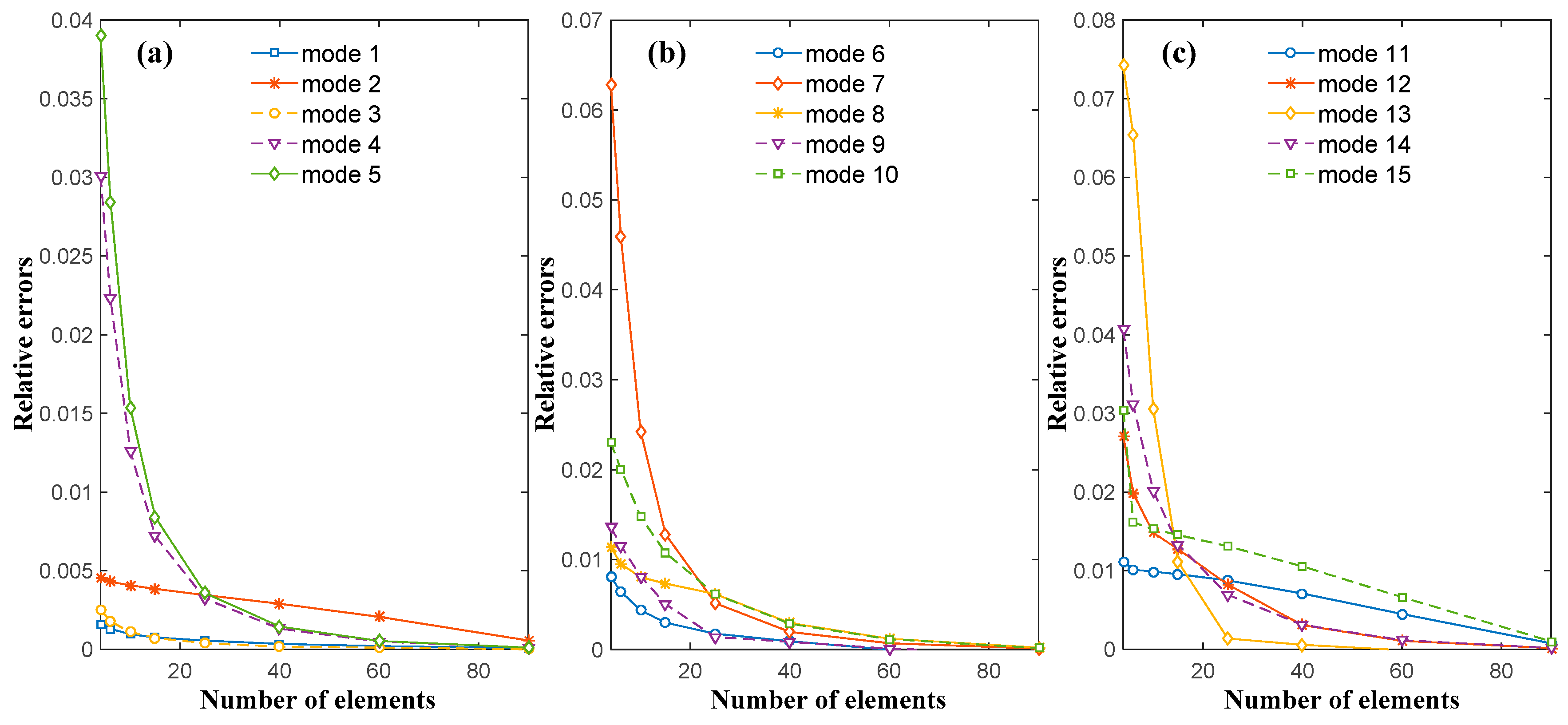
4.1. Convengence of the Finite Element
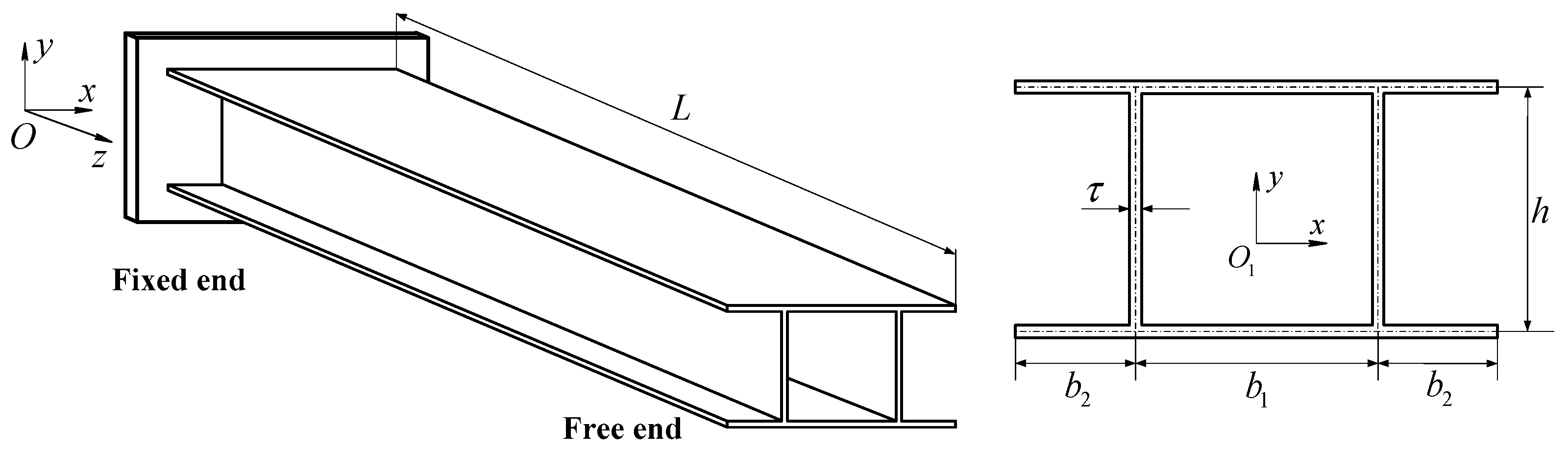
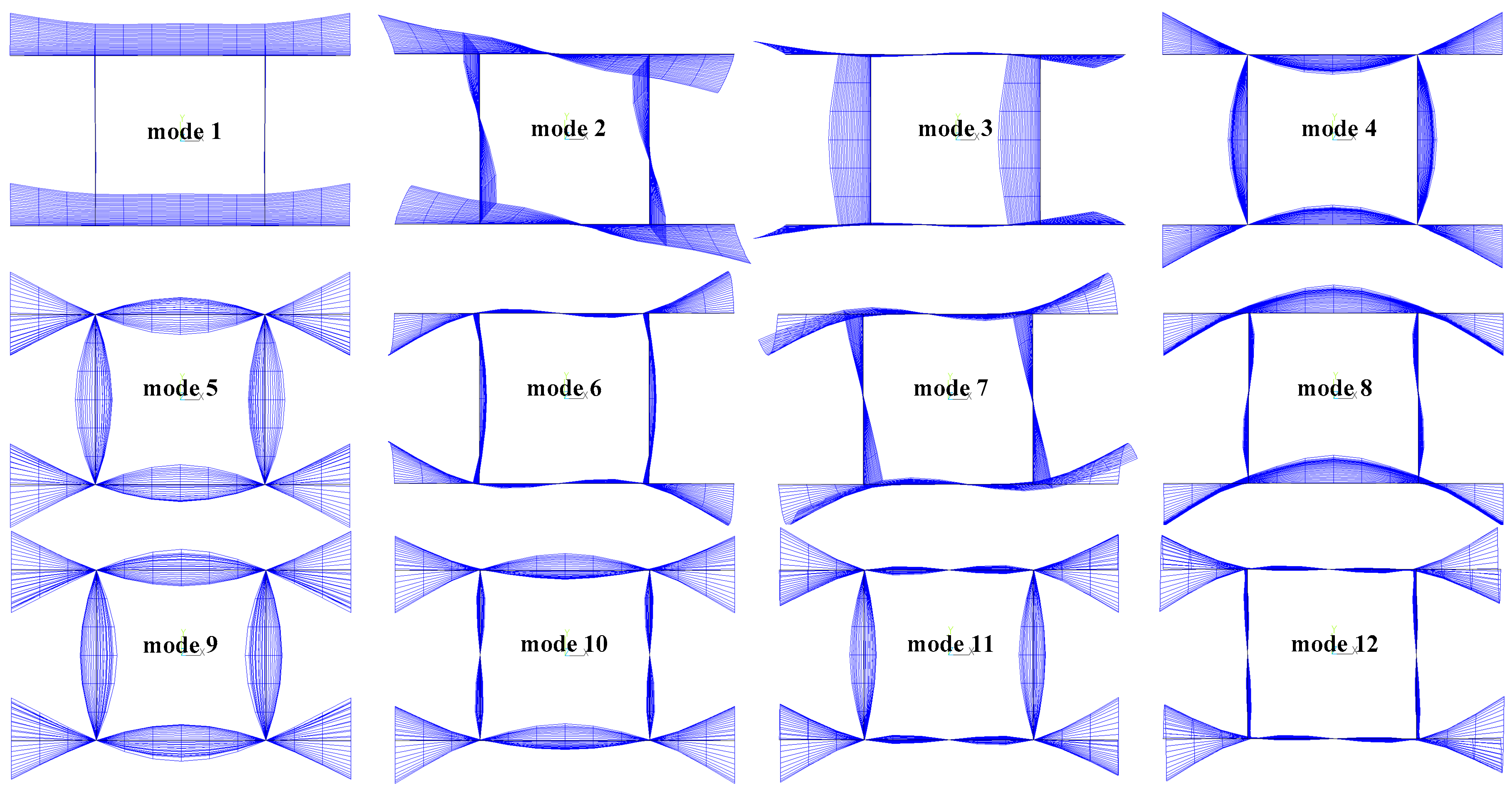
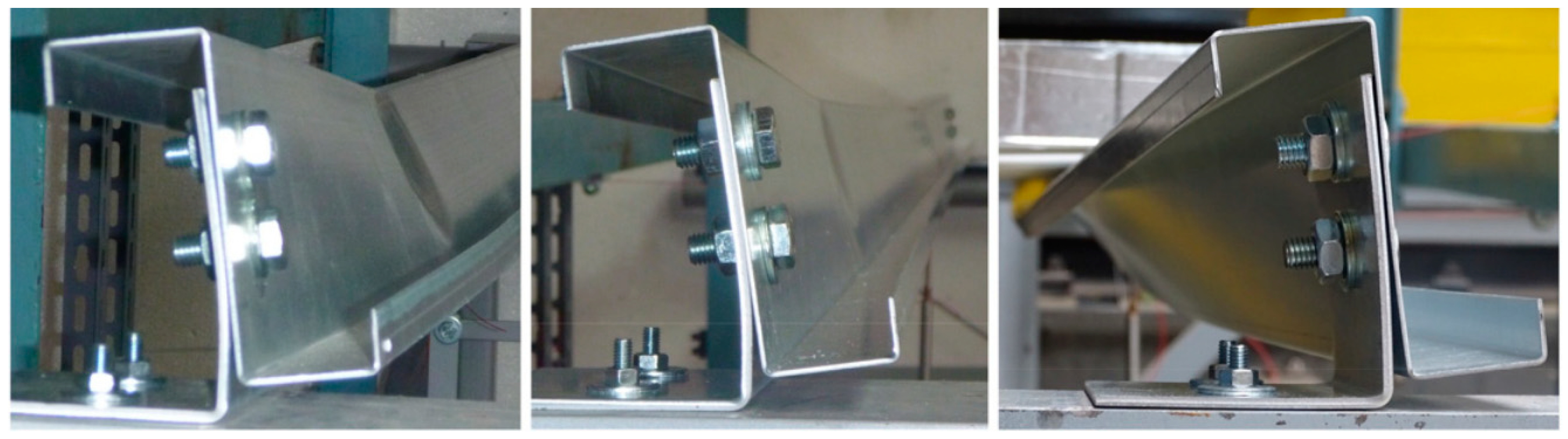
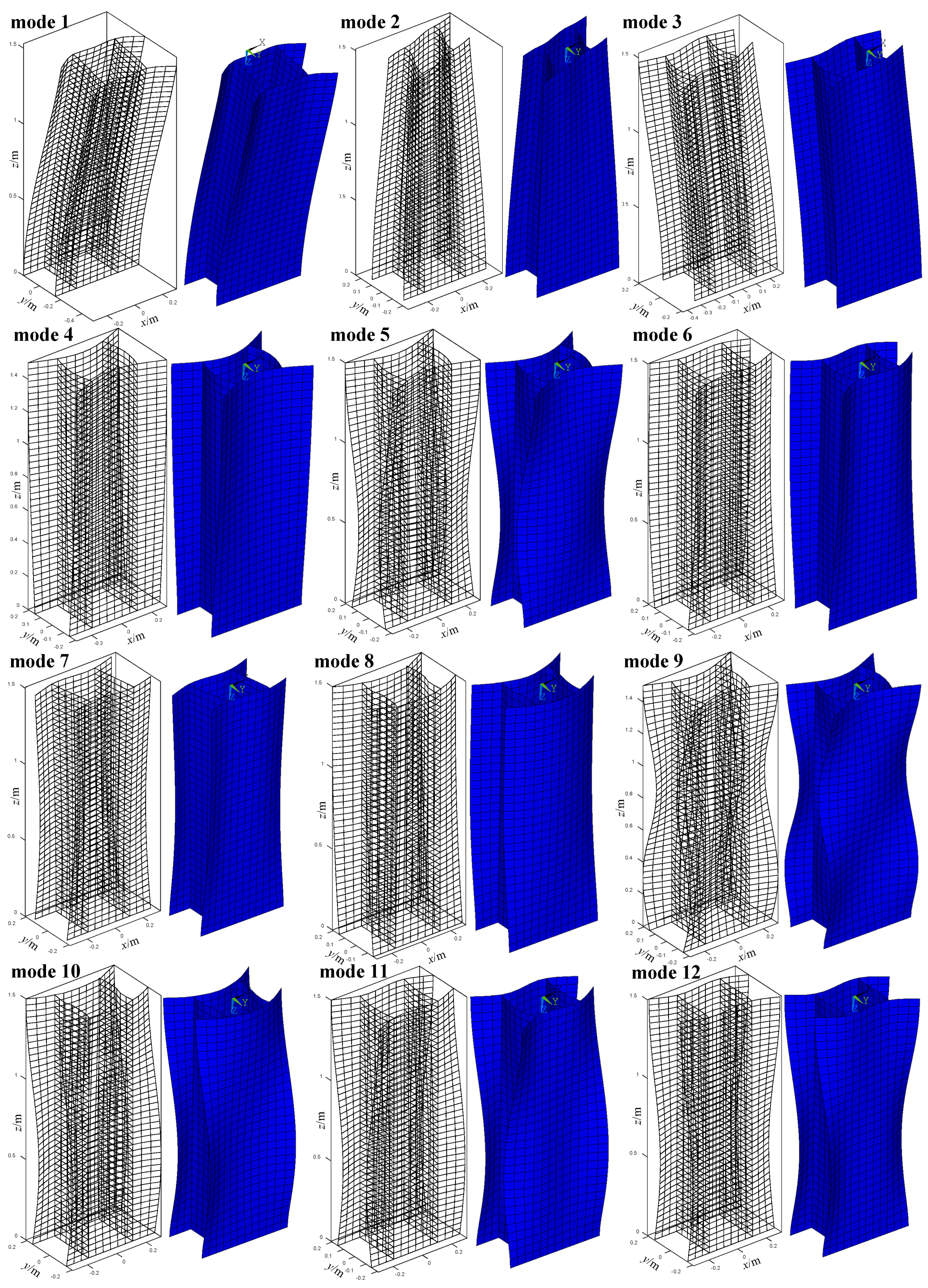
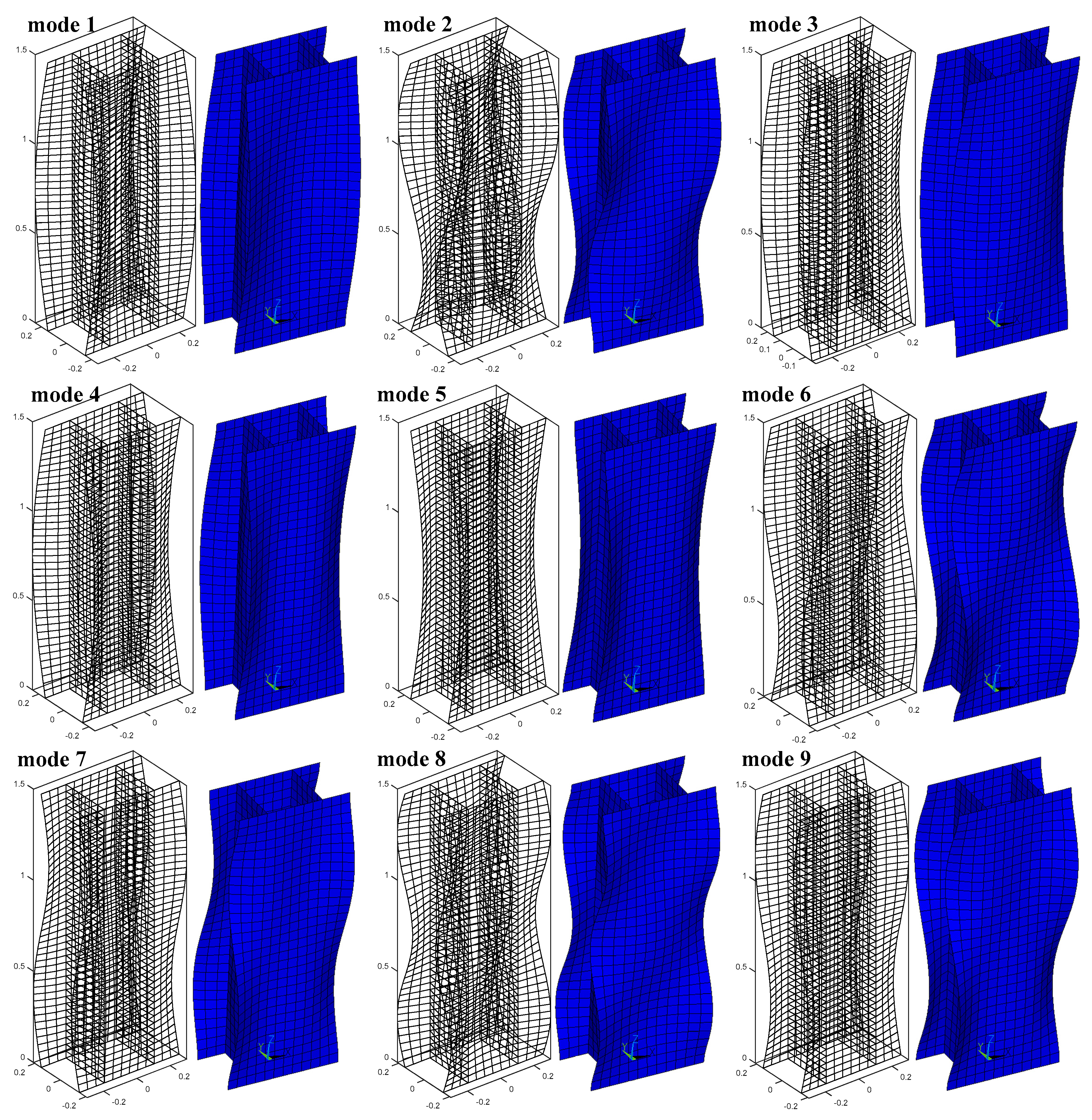
4.2. Case Study 1: A Thin-Walled Structure Fixed at One End
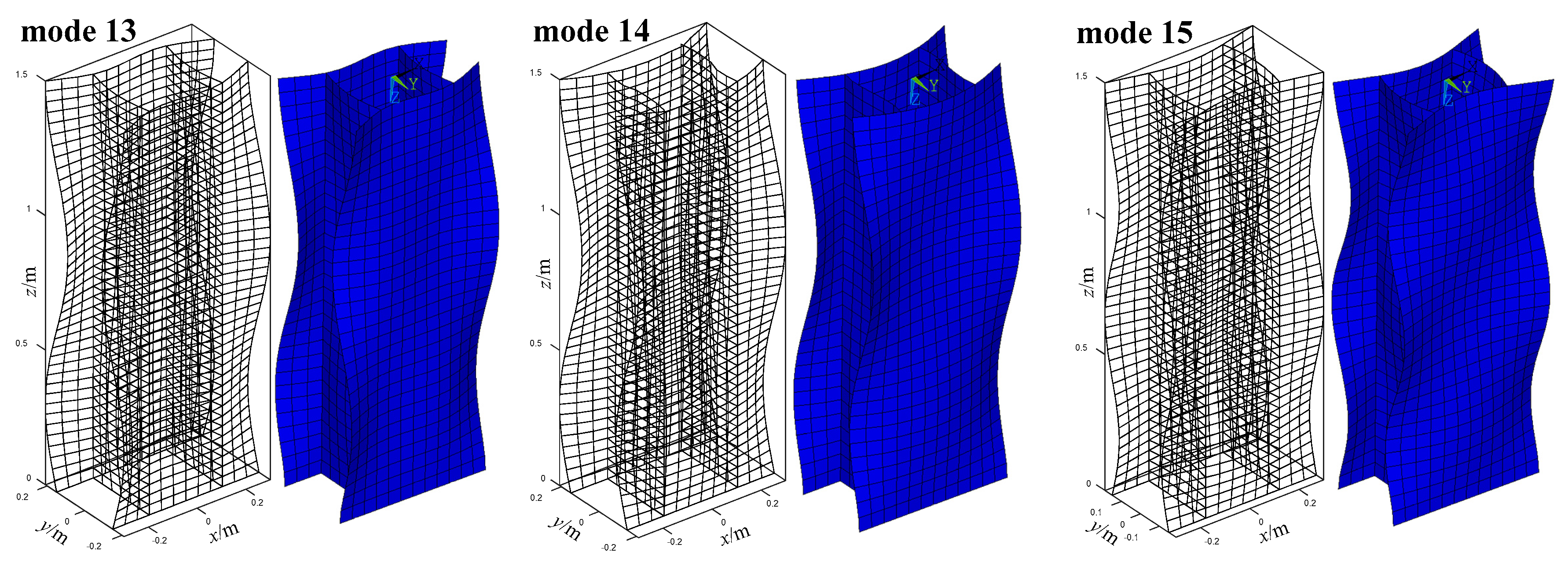
4.3. Case Study 2: A Thin-Walled Structure Fixed at Two Ends
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Peres, N.; Gonçalves, R.; Camotim, D. GBT-based cross-section deformation modes for curved thin-walled members with circular axis. Thin-Walled Struct. 2018, 127, 769–780. [Google Scholar] [CrossRef]
- Carrera, E.; Pagani, A.; Petrolo, M.; Zappino, E. Recent developments on refined theories for beams with applications. Mech. Eng. Rev. 2015, 2, 1400298. [Google Scholar] [CrossRef]
- Vlasov, V.Z. Thin-Walled Elastic Beams; Israel Program for Scientific Translations: Jerusalem, Israel, 1961. [Google Scholar]
- Yoon, K.; Kim, D.N.; Lee, P.S. Nonlinear torsional analysis of 3D composite beams using the extended St. Venant solution. Struct. Eng. Mech. 2017, 62, 33–42. [Google Scholar] [CrossRef]
- Sibileau, A.; García-González, A.; Auricchio, F.; Morganti, S.; Díez, P. Explicit parametric solutions of lattice structures with proper generalized decomposition (PGD). Comput. Mech. 2018, 62, 871–891. [Google Scholar] [CrossRef]
- Ghorashi, M. Nonlinear static and stability analysis of composite beams by the variational asymptotic method. Int. J. Eng. Sci. 2018, 128, 127–150. [Google Scholar] [CrossRef]
- Carrera, E.; Pagani, A.; Banerjee, J.R. Linearized buckling analysis of isotropic and composite beam-columns by Carrera Unified Formulation and dynamic stiffness method. Mech. Adv. Mater. Struct. 2016, 23, 1092–1103. [Google Scholar] [CrossRef]
- Petrolo, M.; Nagaraj, M.H.; Kaleel, I.; Carrera, E. A global-local approach for the elastoplastic analysis of compact and thin-walled structures via refined models. Comput. Struct. 2018, 206, 54–65. [Google Scholar] [CrossRef]
- Pagani, A.; Carrera, E. Large-deflection and post-buckling analyses of laminated composite beams by Carrera Unified Formulation. Compos. Struct. 2017, 170, 40–52. [Google Scholar]
- Cambronero-Barrientos, F.; Díaz-del-Valle, J.; Martínez-Martínez, J.A. Beam element for thin-walled beams with torsion, distortion, and shear lag. Eng. Struct. 2017, 143, 571–588. [Google Scholar] [CrossRef]
- Yu, J.; Hu, S.W.; Xu, Y.C.; Fan, B. Coupled mechanism on interfacial slip and shear lag for twin-cell composite box beam under even load. J. Mech. 2018, 34, 601–616. [Google Scholar] [CrossRef]
- Lim, T.K.; Kim, J.H. Thermo-elastic effects on shear correction factors for functionally graded beam. Compos. Part B-Eng. 2017, 123, 262–270. [Google Scholar] [CrossRef]
- Akgöz, B.; Civalek, Ö. Effects of thermal and shear deformation on vibration response of functionally graded thick composite microbeams. Compos. Part B-Eng. 2017, 129, 77–87. [Google Scholar] [CrossRef]
- Lacidogna, G. Tall buildings: Secondary effects on the structural behaviour. Proc. Inst. Civ. Eng.-Struct. Build. 2017, 170, 391–405. [Google Scholar] [CrossRef]
- Tuysuz, O.; Altintas, Y. Time-domain modeling of varying dynamic characteristics in thin-wall machining using perturbation and reduced-order substructuring methods. J. Manuf. Sci. Eng.-Trans. ASME 2018, 140, 011015. [Google Scholar] [CrossRef]
- de Lacalle, L.N.L.; Viadero, F.; Hernández, J.M. Applications of dynamic measurements to structural reliability updating. Probab. Eng. Mech. 1996, 11, 97–105. [Google Scholar] [CrossRef]
- Zhou, J.; Wen, S.; Li, F.; Zhu, Y. Coupled bending and torsional vibrations of non-uniform thin-walled beams by the transfer differential transform method and experiments. Thin-Walled Struct. 2018, 127, 373–388. [Google Scholar] [CrossRef]
- Schardt, R. Eine erweiterung der technischen biegetheorie zur berechnung prismatischer faltwerke. Der Stahlbau 1966, 35, 161–171. [Google Scholar]
- Schardt, R. Lateral torsional and distortional buckling of channel-and hat-sections. J. Constr. Steel Res. 1994, 31, 243–265. [Google Scholar] [CrossRef]
- Davies, J.M.; Leach, P.; Heinz, D. Second-order generalised beam theory. J. Constr. Steel Res. 1994, 31, 221–241. [Google Scholar] [CrossRef]
- Silvestre, N.; Camotim, D.; Silva, N.F. Generalized beam theory revisited: From the kinematical assumptions to the deformation mode determination. Int. J. Struct. Stab. Dyn. 2011, 11, 969–997. [Google Scholar] [CrossRef]
- Martins, A.D.; Camotim, D.; Gonçalves, R.; Dinis, P.B. Enhanced geometrically nonlinear generalized beam theory formulation: Derivation, numerical implementation, and illustration. J. Eng. Mech. 2018, 144, 04018036. [Google Scholar] [CrossRef]
- de Miranda, S.; Madeo, A.; Melchionda, D.; Patruno, L.; Ruggerini, A.W. A corotational based geometrically nonlinear Generalized Beam Theory: Buckling FE analysis. Int. J. Solids Struct. 2017, 121, 212–227. [Google Scholar] [CrossRef]
- Vieira, R.F.; Virtuoso, F.B.E.; Pereira, E.B.R. Buckling of thin-walled structures through a higher order beam model. Comput. Struct. 2017, 180, 104–116. [Google Scholar] [CrossRef]
- Vieira, R.F.; Virtuoso, F.B.; Pereira, E.B.R. A higher order model for thin-walled structures with deformable cross-sections. Int. J. Solids Struct. 2014, 51, 575–598. [Google Scholar] [CrossRef]
- Zhang, L.; Zhu, W.; Ji, A.; Peng, L. A simplified approach to identify sectional deformation modes of thin-walled beams with prismatic cross-sections. Appl. Sci. 2018, 8, 1847. [Google Scholar] [CrossRef]
- Debski, H.; Teter, A.; Kubiak, T.; Samborski, S. Local buckling, post-buckling and collapse of thin-walled channel section composite columns subjected to quasi-static compression. Compos. Struct. 2016, 136, 593–601. [Google Scholar] [CrossRef]
- Ciesielczyk, K.; Studziński, R. Experimental and numerical investigation of stabilization of thin-walled Z-beams by sandwich panels. J. Constr. Steel Res. 2017, 133, 77–83. [Google Scholar]
- Carpinteri, A.; Lacidogna, G.; Nitti, G. Open and closed shear-walls in high-rise structural systems: Static and dynamic analysis. Curved Layer. Struct. 2016, 3, 154–171. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhang, L.; Shen, G.; Cao, G. A one-dimensional higher-order theory with cubic distortional modes for static and dynamic analyses of thin-walled structures with rectangular hollow sections. Acta Mech. 2016, 227, 2451–2475. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Present Model [Hz] | ANSYS Shell [Hz] | Relative Errors [%] |
|---|---|---|---|
| 1st | 145.63 | 140.38 | 3.74 |
| 2nd | 178.26 | 171.89 | 3.71 |
| 3rd | 181.35 | 175.63 | 3.26 |
| 4th | 183.62 | 185.45 | −0.99 |
| 5th | 207.44 | 215.37 | −3.68 |
| 6th | 256.86 | 262.87 | −2.29 |
| 7th | 257.87 | 263.73 | −2.22 |
| 8th | 262.62 | 263.86 | −0.47 |
| 9th | 263.46 | 270.28 | −2.52 |
| 10th | 274.70 | 277.07 | −0.86 |
| 11th | 279.30 | 278.06 | 0.45 |
| 12th | 297.71 | 309.49 | −3.81 |
| 13th | 310.89 | 324.74 | −4.26 |
| 14th | 312.69 | 324.75 | −3.71 |
| 15th | 332.30 | 346.36 | −4.06 |
| Mode | Present Model (Hz) | ANSYS Shell (Hz) | Relative Errors (%) |
|---|---|---|---|
| 1st | 192.92 | 199.38 | −3.24 |
| 2nd | 236.09 | 247.04 | −4.43 |
| 3rd | 251.2 | 262.52 | −4.31 |
| 4th | 261.05 | 264.38 | −1.26 |
| 5th | 272.95 | 285.35 | −4.35 |
| 6th | 290.23 | 303.77 | −4.46 |
| 7th | 290.85 | 303.95 | −4.31 |
| 8th | 309.11 | 319.79 | −3.34 |
| 9th | 321.77 | 335.58 | −4.12 |
| 10th | 351.7 | 367.43 | −4.28 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Ji, A.; Zhu, W.; Peng, L. On the Identification of Sectional Deformation Modes of Thin-Walled Structures with Doubly Symmetric Cross-Sections Based on the Shell-Like Deformation. Symmetry 2018, 10, 759. https://0-doi-org.brum.beds.ac.uk/10.3390/sym10120759
Zhang L, Ji A, Zhu W, Peng L. On the Identification of Sectional Deformation Modes of Thin-Walled Structures with Doubly Symmetric Cross-Sections Based on the Shell-Like Deformation. Symmetry. 2018; 10(12):759. https://0-doi-org.brum.beds.ac.uk/10.3390/sym10120759
Chicago/Turabian StyleZhang, Lei, Aimin Ji, Weidong Zhu, and Liping Peng. 2018. "On the Identification of Sectional Deformation Modes of Thin-Walled Structures with Doubly Symmetric Cross-Sections Based on the Shell-Like Deformation" Symmetry 10, no. 12: 759. https://0-doi-org.brum.beds.ac.uk/10.3390/sym10120759