Orientational Sampling Schemes Based on Four Dimensional Polytopes

School of Chemistry, University of Southampton, University Road, Southampton SO17 1BJ, UK
*
Author to whom correspondence should be addressed.
Symmetry 2010, 2(3), 1423-1449; https://0-doi-org.brum.beds.ac.uk/10.3390/sym2031423
Submission received: 4 February 2010
/
Revised: 27 May 2010
/
Accepted: 30 June 2010
/
Published: 7 July 2010
(This article belongs to the Special Issue Feature Papers: Symmetry Concepts and Applications)
Abstract
:The vertices of regular four-dimensional polytopes are used to generate sets of uniformly distributed three-dimensional rotations, which are provided as tables of Euler angles. The spherical moments of these orientational sampling schemes are treated using group theory. The orientational sampling sets may be used in the numerical computation of solid-state nuclear magnetic resonance spectra, and in spherical tensor analysis procedures.
1. Introduction
In general, physical properties are anisotropic, meaning that they depend on the orientation of the object of interest in three-dimensional space, defined with respect to an external reference frame. For example, the magnetic resonance response of solid samples depends on the orientation of the molecules with respect to the applied magnetic field [1,2]. Similar considerations apply to many other physical quantities and spectroscopic properties.
If the physical system is macroscopically isotropic (for example, a finely-divided powdered solid), all molecular orientations are encountered with equal probability. The physical response of such systems is an average over all molecular orientations.
Suppose that a computational method exists for estimating the value of a particular macroscopic observable for a single molecular orientation. To estimate the powder response, it is necessary to average the results of such computations over a large number of distinct orientations. This is called powder averaging, and is a common procedure in, for example, the computation of solid-state magnetic resonance observables [3,4,5,6]. In general, the computational cost of powder averaging is proportional to the number of sampled orientations. It is clearly desirable to use an orientational sampling scheme that gives an acceptable approximation to the isotropic result using the minimum number of orientations. The problem of optimum orientational sampling has been a recurring feature of the solid-state nuclear magnetic resonance (NMR) literature for many years [3,4,5,6].
In addition, there are experimental procedures that require repetition of an experiment for a set of different physical orientations of the system (or parts of the system), in order to estimate the values of anisotropic physical quantities. Physical manipulations of this kind are found, for example, in the NMR of microscopically oriented samples such as single crystals or oriented materials [1].
There are also experiments of this type in which the sample remains fixed in space, but the orientations of the nuclear spin polarizations are manipulated using applied radio-frequency pulse sequences. For example, in the class of experiments known as spherical tensor analysis [7,8,9], the orientational space of the nuclear spins is sampled in order to derive the spherical tensor components of the quantum statistical operator describing the state of the nuclear spin ensemble. In all such experimental procedures, it is desirable that the orientation sampling scheme is as efficient as possible.
1.1. Gaussian Spherical Quadrature
An approach to the orientational sampling problem, using the concept of Gaussian spherical quadrature, was described by Edén et al. in 1998 [4]. This approach may be summarized as follows: An orientational sampling scheme consists of a finite set of distinct orientations in three-dimensional space, and a set of weights with the property . Both sets have the same number of elements . The isotropic average of a physical observable Q is estimated by computing Q for each orientational sampling point and superposing the results according to:
The performance of a sampling scheme may be characterized by its spherical moments, which are defined as follows:
Here is an element of the Wigner matrix [10] of integer rank ℓ, evaluated at orientation . The Wigner matrices are representations of the group of the three-dimensional rotations , with the Wigner matrices of integer rank ℓ spanning the irreducible representation of of dimension . If the rotation is parametrized using the three Euler angles , representing consecutive rotations about the z, y and z-axes of 3D space, all Wigner matrix elements may be written as follows:
where is an element of the reduced Wigner matrix and the indices m and span the integers in the range . By definition, the zero-rank spherical moment is given by .
As discussed by Edén et al. [4], orientational sampling schemes may be constructed which have vanishing spherical moments over a range of ranks, i.e.
Schemes of this kind often provide a good approximation for the isotropic average of an observable Q, using a sampling set of relatively small size. Their performance is particularly good if Q is a smooth function of orientation . This is called Gaussian spherical quadrature since it describes a numerical approach to integration of a function over three-dimensional space that is analogous to Gaussian numerical integration on a line interval. The Wigner functions play the same role as orthogonal polynomials in the case of Gaussian line integration.
In general, sampling schemes with large values of provide a more accurate isotropic average than schemes with small values of , but require a larger number of elements for their realization. The central problem in Gaussian spherical quadrature is to achieve large values of with as small as possible.
1.2. Two-angle Sampling and Regular Polyhedra
In many physical situations, the observable of interest Q depends on only two of the three Euler angles defining the orientation in three-dimensional space. This situation arises, for example, in the ordinary NMR of static solids, where the rotational angle of the sample around the static magnetic field has no influence on NMR observables. This is also true for some classes of NMR experiments in rotating solids, as discussed in Reference [4].
Consider an experiment, or computational procedure, of this type, in which the observable of interest does not depend on the third Euler angle . In such cases, the only relevant spherical moments of an orientational sampling scheme have . The known relationships between Wigner functions of the type and the spherical harmonics allows the relevant spherical moments to be written as follows:
where means complex conjugation. The problem of two-angle orientational sampling is therefore closely related to the problem of Gaussian quadrature on the surface of a sphere, using spherical harmonics as the orthogonal basis functions. The correspondence of the Euler angles to the polar angles of a point on the surface of a sphere is as follows:
For small values of , efficient two-angle sampling schemes may be constructed from the vertices of the regular three-dimensional polyhedra. As discussed below, the point symmetry groups of such polyhedra ensure that many of the spherical moments vanish. For example, the 12 vertices of the icosahedron may be used to construct an orientational sampling set with , all , and spherical moments for . All spherical moments with odd values of ℓ vanish for this set as well. These favourable properties are well-known in nuclear magnetic resonance and have led to numerous applications [11,12].
It is not possible to construct sampling sets with from the vertices of the regular 3D polyhedra. However Lebedev and co-workers [13,14,15] have constructed schemes with large values of by using well-chosen orientational sampling points and non-uniform weights. Alternative methods are also available, which do not have such well-defined mathematical properties, but which perform well in many circumstances, for example the REPULSION approach of Bak and Nielsen, which uses numerical optimization under a repulsive electrostatic potential to distribute many points evenly on the surface of a 3D sphere [3].
1.3. Three-Angle Sampling and Regular 4-Polytopes
There are numerous cases where the observable of interest depends on all three Euler angles defining the orientation . Some examples from the field of solid-state nuclear magnetic resonance are discussed in Reference [4,5]. In such cases, it is important that the spherical moments vanish for all combinations of m and within a given rank ℓ, and not just the special components with .
As described in Reference [4], it is possible to construct three-angle orientational sampling sets with the appropriate properties by (i) taking a two-angle sampling set with the property for , and (ii) repeating each sampling point while stepping the third angle through regularly-spaced subdivisions of . This generates a three-angle sampling set with the desired property for all and . For example, an icosahedral two-angle set with may easily be extended to a three-angle set with and . The Lebedev two-angle sets may be extended in analogous fashion. The problems with this approach are (i) it is not efficient, requiring large numbers of orientational samples for modest values of and (ii) it does not treat the Euler angles and in the same way.
Since efficient two-angle sampling schemes may be derived from the vertices of regular polyhedra, which fall on a sphere in 3D space, it is natural to speculate that efficient three-angle sampling schemes may be derived from the vertices of regular solids in four dimensions, which fall on a sphere in 4D space. The regular 4D solids are known as regular 4-polytopes or regular polychora [16] and have been studied extensively by mathematicians, in particular Coxeter [17].
Suppose that a 4-polytope is constructed with the vertices lying on the surface of a 4D sphere with unit radius. Each vertex may be converted into a rotation operation in 3D space by identifying it as a unit vector of the following form:
where is the rotation angle and is the unit rotation axis in 3-space, . Hence, uniformly distributed rotations in 3-space may be constructed from the vertices of regular 4-polytopes deducing the corresponding 3D rotation angles and rotation axes from Equation 7. There is one important complication: unit vectors of the form and correspond to rotations differing by an angle of , which have the same physical effect on ordinary 3D objects, or on quantum states with integer spin. Hence, a 4-polytope which has the inversion amongst its symmetry operations gives rise to only half the number of physically distinct 3D rotations as its number of vertices. As discussed below, this property applies to all the regular 4-polytopes, with one exception.
Suppose now that a set of N 3D rotations is constructed from the vertices of a regular 4-polytope, and that all of the sampling weights are uniform, , . Many of the spherical moments, defined in Equation 2, are expected to vanish, through symmetry. The question is: for which ranks ℓ do all spherical moments of the form vanish? Although this question has been answered in part using the theory of spherical designs [18], it is also possible to treat this problem by relatively simple group theoretical arguments that may be more accessible to non-mathematicians. However, the application of group theory to this problem is made more difficult by the fact that the symmetry operations of the regular 4-polytopes, and the character tables of the corresponding symmetry groups, are distributed over several sources [19,20,21,22,23]. In this article we collate the symmetry operations and their characters for the regular 4-polytopes in the -dimensional representations spanned by the Wigner matrices . We derive by group theory the vanishing spherical moments for 3D rotation sets derived from each of the regular 3D and 4D solids. Explicit tables of Euler angles are given, based on the vertices of the regular 4-polytopes. These results should be useful for workers in a wide range of physical sciences, especially magnetic resonance, where one such scheme is already in use [9,24].
2. Group Theory and Symmetry Averaging
2.1. Groups, Representations and Characters
A minimal introduction to group theory is now given in order to establish the notation. For more details, consult the standard texts, for example [25,26,27,28].
An abstract group is a collection of elements G for which a particular associative operation ∘ combines any two elements to give another element in the group. A valid group must include an identity element E such that , and all elements must have an inverse such that . Any subset of a group which itself satisfies the group axioms above is called a subgroup.
Groups can be represented by matrices. An n-dimensional linear representation of a group assigns an invertible (real or complex) matrix to each group element G, so that the group operation ∘ corresponds to the operation of matrix multiplication:
A representation is said to be irreducible if it is not possible to find a basis in which all the matrix representatives of the group elements have the same block diagonal form.
The explicit matrix representations are dependent on the choice of the basis vectors. However, for a given representation , the characters, defined as the traces of the matrix representations
are independent of the basis. Two group elements G and are said to belong to the same class if they are related through a similarity transformation of the form where A also belongs to the group . All elements in the same class have the same character for all representations , i.e.
2.2. Subgroup Averaging
Suppose now that the group contains a finite subgroup containing elements. A representation of the group is also a representation of the subgroup . The finite group orthogonality theorem [28] implies that the number of independent linear combinations of basis vectors spanning the representation which are invariant under all of the subgroup operations is given by
where is the number of elements of that belong to the class . The last two formulations on the right-hand side of 11 are equivalent since all elements in the same class have the same character. This equation leads to the following property:
The sum of matrices in the representation vanishes if the characters sum to zero over all classes of , taking into account the number of subgroup elements in each class.
2.3. Average of a Function in n-dimensional Space
Consider now the case where the group elements G are transformations acting on the points of the n-dimensional real space , i.e.
For each group element G, there exists a corresponding operator acting on functions of the coordinate vectors to generate new functions , defined as follows:
The definition above corresponds to an active transformation of the object f [28].
The average function over a finite subgroup of is defined by
where the sum is taken over all elements and the same argument is implied on both sides of the equation.
2.4. Average of a Function Over the Polytope Vertices
The average value of a function f over a finite set P of points in the n-dimensional space is defined as follows:
where denote the coordinate vectors of the points for . A group of dimensional transformations is said to act transitively on the P when for any given pair of points there is a transformation G which connects such points [25].
The orbit stabilizer and Lagrange theorems for finite groups [25] relate the average of a function f over P to the average over any finite group acting transitively on the set:
The right-hand side corresponds to Equation 15, evaluated at any point in the set. From Equation 17, the average vanishes if the function f is one of the basis functions of the representation , and the characters of the given finite group sum to zero for that representation:
Equation 20 is the central result of this section. The point symmetry group of an n-dimensional regular polytope is a finite group which acts transitively on the polytope vertices. It is a subgroup of the (infinite) orthogonal group , which is the group of all the n-dimensional space transformations in with a single fixed point and which preserve distance between transformed points. Using Equation 20, the averaging properties of a function over the vertices of a polytope may be deduced from the characters of the symmetry elements and the classes of its symmetry point group. This result is now applied to the spherical moments of the regular solids.
3. Polyhedral Averaging in Three Dimensions
Three dimensional polytopes are known as polyhedra. In this section we discuss the averaging properties of the regular polyhedra with respect to spherical harmonics. Although this topic has been treated before in Reference [11], a recapitulation is useful for framing the discussion of four-dimensional symmetries. In addition, the treatment in Reference [11] did not exploit all the available symmetries, as discussed below.
3.1. Proper and Improper Rotations
The proper rotations in three dimensions may be defined in various ways. For example, the symbol indicates a rotation through the angle about a unit rotation axis whose direction is defined by the polar angles . The identity operation does not need any specification of the rotation axis. Any rotation in 3D space may be decomposed into the product of three consecutive rotations around the cartesian reference axes, for example: , where the rotations are applied in sequence from right to left. For a given rotation R the three Euler angles and the set are related [10]. Specifically, the rotation angle is related to the Euler angles as follows:
The improper rotations in three-dimensional space may be expressed in various ways. In this article, we use the set of improper rotations, denoted . Each improper rotation corresponds to a proper rotation followed by an inversion through the reference frame origin (roto-inversion). By definition, the inversion operation corresponds to the improper rotation , where the rotation axis does not need to be specified in this case.
Two other improper rotations are often used in the literature: the reflection in the plane h, and the roto-reflection which is a rotation through followed by reflection in the plane perpendicular to the rotation axis. Reflections and roto-reflections correspond to improper rotations as follows: where is perpendicular to the plane h, and where is the rotation axis defined by for . Clearly and .
3.2. Representations and Characters of Isometries
The set of spherical harmonics of rank-ℓ is defined as follows:
where ℓ and m are integers with and is the associated Legendre polynomial [10]. This set of functions is a basis for the -dimensional irreducible representation of the group. The action of any operation G on these functions defines an operator which is represented by a matrix :
In the case of a proper rotation R, the matrix representative is given by the rank-ℓ Wigner matrix:
In the case of an improper rotation , the sign of the matrix changes for odd rank ℓ:
The character of a proper rotation for the rank-ℓ representation is equal to the trace of the corresponding Wigner matrix, , which depends on the rotation angle only [10, pp. 99–100]:
where
This evaluates to when the rotation angle is an integer multiple of .
The character of an improper rotation is the same as for the corresponding proper rotation, but with a change in sign for odd values of ℓ:
3.3. Regular Convex Polyhedra
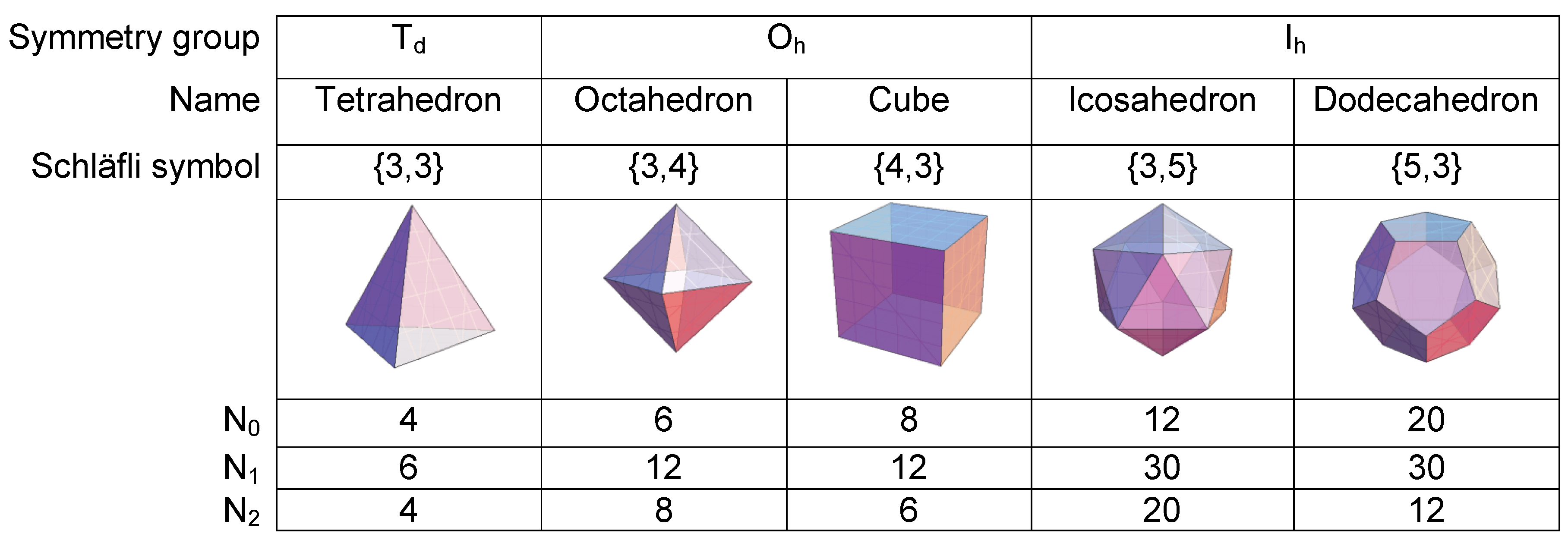
The five regular convex polyhedra have been known since the Greeks. Their names and properties are listed in Figure 1. This figure also provides the Schläfli symbols [17] of the form , where p indicates the number of edges of the regular polygonal face, and q is the number of faces meeting at one vertex. For example, the cube has Schläfli symbol , while the regular octahedron has the Schläfli symbol . Polyhedra with Schläfli symbols and are geometrical reciprocals of each other and belong to the same symmetry group, since the reciprocation operation corresponds to the mutual exchange of faces and vertices. The five Platonic solids therefore belong to only three symmetry point groups: (i) , represented by the tetrahedron; (ii) , populated by the cube and the octahedron; and (iii) , populated by the icosahedron and the dodecahedron. The symmetry point groups of the regular polyhedra are given explicitly in Table 1.
3.4. Spherical Moments of the Regular Polyhedra
The theorem in Equation 20 may be used with Table 1 and the characters given in Equations 26 and 28 to deduce the vanishing spherical moments of the regular polyhedra. In general, both improper and proper rotations must be taken into account. The treatment in Reference [11] uses only the proper rotations, and gives slightly different results for the groups and (see below).
As a first example, consider the tetrahedron. As shown in Table 1, the tetrahedron has three symmetry classes of proper rotations, with number of elements and rotation angles respectively. In addition, there are two symmetry classes of improper rotations, with number of elements and rotation angles respectively. The sum of characters for rank is therefore given by
This proves the well-known fact that a tetrahedron averages second-rank spherical harmonics to zero:
The point symmetry groups of the octahedron and icosahedron contain the inversion element. Each proper rotation is therefore accompanied by an improper rotation through the same angle, as shown in Table 1. It follows that all odd-rank spherical moments harmonics vanish when summed over the vertices of polyhedra with symmetries and :
and hence
The treatment of Reference [11] does not predict this result, since only proper rotations were taken into account. The two analyses differ for rank and all odd ranks .
Figure 2 summarizes the spherical rank profiles of the regular convex polyhedra up to rank . Note that even the most symmetrical polyhedra (the icosahedron and the dodecahedron) fail to average the rank terms.
There are 4 regular non-convex polyhedra (star-polyhedra), which all fall in the group [17]. Four of them have the same vertices of the icosahedron while one has the same vertices as the dodecahedron. All have the same spherical moment characteristics as the icosahedron.
4. Polytopic Averaging in Four Dimensions
In this section we derive the spherical averaging properties of the regular 4-polytopes. In the discussion below, we make extensive use of quaternions [29]. As shown in Equation 7, quaternions provide a correspondence between points on a unit sphere in four-dimensional space, and the group of three-dimensional rotations.
4.1. Quaternions
Four-dimensional real space is a vector space: any two vectors can be added or multiplied by a scalar to give another vector. Quaternions extend the vectorial structure of 4D real space by allowing the multiplication of two 4D vectors and according to
The adjoint of a quaternion is denoted here and is defined as follows:
and it can be verified that .
The inverse is defined for any non zero quaternion as the unique quaternion that satisfies:
It can be shown that where .
4.2. Unit Quaternions and 3D Rotations
The set of 4D unit vectors, together with the quaternion multiplication operation ∗, forms the group of unit quaternions . The adjoint of a unit quaternion is the same as its inverse: . From Equation 7, a unit quaternion and its inverse represent a pair of rotations through opposite angles about the same axis.
The group of unit quaternions is homomorphic with the group of proper three-dimensional rotations [30]. The relationship between the product of quaternions and the product of proper 3D rotations is expressed by
where is the function which associates a unit quaternion with the corresponding 3D rotation through Equation 7. Consider, for example, a rotation through the angle about the axis , followed by a rotation through the angle about the axis . The overall rotation angle is given by
from Equation 7 and 33.
Using the notation to indicate the Wigner matrix of rank ℓ evaluated for the 3D rotation corresponding to the unit quaternion , Equation 36 implies:
The Wigner matrices of rank ℓ form a -dimensional representation of the unit quaternion group . In particular and we can use the following properties for the Wigner matrix elements [10, pp.79–80]
The explicit correspondence between the Euler angles and the unit quaternion components is as follows:
where is equal to , determing the quadrant from the sign of x and y. In the special cases or , only the combinations are defined, as follows:
4.3. Proper and Improper Rotations
Isometries in 4D space are classed as either proper (preserving the handedness of the four-dimensional axis system) or improper (changing the handedness of the axis system). The group of all isometries with one fixed point in four dimensions is called . Any operation may be expressed in terms of two unit quaternions, denoted here and [19], as explained below. Proper operations will be denoted by and improper operations by respectively. The action of a proper rotation on a point in 4D space may be written as follows:
The action of an improper roation is as follows:
The inverse operations are given by
for proper and improper operations respectively.
4.4. Representation and Characters of Isometries
In this section we give the explicit matrix representations of the operators and their characters in the basis of the Wigner matrices. These results will then be used to establish the spherical averaging properties of the regular 4-polytopes.
According to Equations 14, 44, 38 and 39, a proper transformation in defines an operator which acts as follows on the Wigner matrix elements evaluated at any unit quaternion :
Similarly according to Equations 14, 45, 38 and 39 an improper transformation in defines an operator which acts as follows:
The action of any operation G on the Wigner functions , evaluated for the rotation corresponding to the unit quaternion , defines an operator which may be represented as a -dimensional matrix :
This proves that the Wigner matrices are a basis for the representation of the group . The matrix representations are given by
for a proper transformation and
for an improper transformation . In both cases the Wigner matrix elements are evaluated for rotations corresponding to the left and right quaternions and , as defined for the given operation.
The character of a general 4D rotations in the rank-ℓ representation is obtained by summing the matrix representations given by Equations 49 and 50 over the indices and . For proper rotations this leads to the following result:
where and are the rotation angles for the pair of 3D rotations corresponding to the left and right quaternions. For improper rotations, on the other hand, we get
where is the rotational angle associated with the quaternion product .
4.5. Regular Convex 4-Polytopes
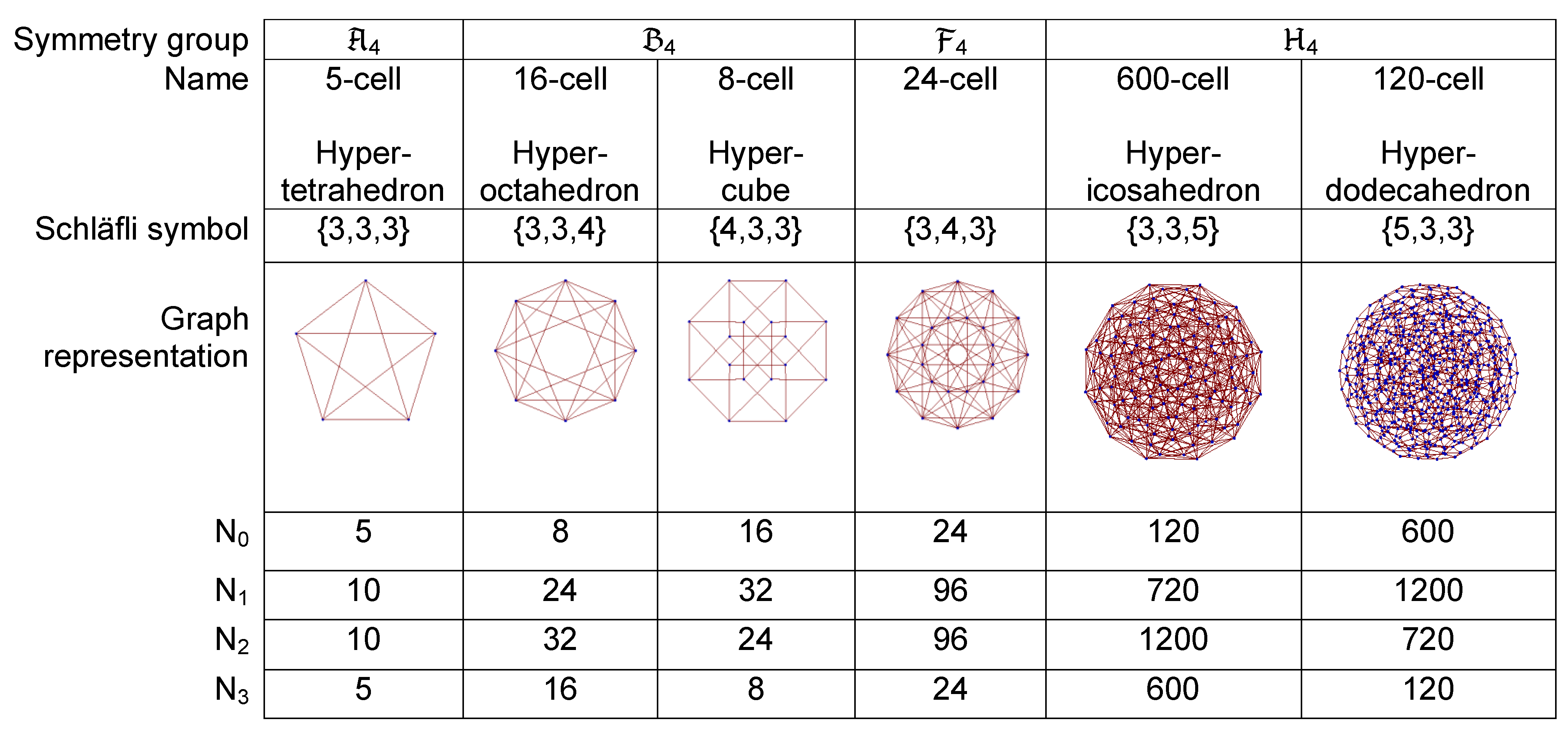
The six regular convex polytopes are summarized in Figure 3. Each of them is represented by a Schläfli symbol of the form in which p and q determine the Schläfli symbol for the 3-dimensional polyhedron that forms the boundary of the figure and r is the number of polyhedra meeting at one edge [17].
Polytopes with Schläfli symbols and are reciprocals of each other and belong to the same symmetry group. The six regular convex 4-polytopes therefore belong to only four symmetry groups. These are (i) the group (isomorphic to the permutation group of 5 elements, ), populated by the 5-cell (hypertetrahedron); (ii) the group , populated by the mutually reciprocal 8-cell (hypercube) and 16-cell (hyperoctahedron); (iii) the group , populated by the 24-cell; and (iv) the group , populated by the mutually reciprocal 120-cell (hyperdodecahedron) and 600-cell (hypericosahedron).
Table 2 reports the four symmetry groups of the six regular polytopes and their symmetry elements, given in the quaternion form. The numbers of operations in each class are provided, together with one representative operation, using the notation for proper transformations and for improper transformations. In the case of the group , the symmetry classes and representative operations are given directly in quaternion form in Reference [23]. For the other groups, the information given in the literature [20,21,22] is not directly suitable for this type of analysis. In these cases, the quaternion form of the representative operations and the class structure were obtained by using the information provided in Reference [19] with the help of the symbolic software platform Mathematica [31].
4.6. Spherical Moments of the Regular 4-Polytopes
The spherical averaging properties of the regular 4-polytopes may be deduced by using Equation 20 together with the sets of symmetry operations (Table 2), and the characters of the 4D rotations, given in Equations 51 and 52.
As an example, consider the 5-cell, which has symmetry group . From Table 2, there are seven symmetry classes. The four classes of proper operations have elements respectively. The rotational angles to be used in Equation 51 are obtained from Equation 7 and have the following values: , , , . The remaining three classes of improper operations have elements respectively. The rotational angles to be used in Equation 52 are obtained from Equations 7 and 37 and are as follows: . The sum of characters for rank is therefore given by
This proves that all first-rank spherical moments of a 5-cell are equal to zero:
The spherical rank profiles of the other regular polytopes may be obtained in this way for any ℓ: Figure 4 summarizes the results up to rank . As in the 3D case, even the 600-cell and 120-cell, which have the highest symmetry, fail to average out the rank-6 Wigner matrices.
This figure is slightly misleading since only integer ranks ℓ are shown. Since the groups , and possess an inversion operation, with , all spherical moments of half-integer rank vanish for these groups. The group , on the other hand, lacks the inversion, so the spherical moments of half-integer rank do not vanish in this case. The fact that and appear to have the same rank profiles in Figure 4 is therefore due to the omission of half-integer ranks. Most applications of orientational averaging only require integer ranks, in which case the properties shown in Figure 4 are appropriate.
There are 10 regular non-convex polytopes (star-polytopes) in four dimensions, which all fall in the group [17]. Nine of them have the same vertices as the 600-cell, while one has the same vertices as the 120-cell. All have the same spherical moment characteristics as the 600-cell.
Under the reviewing of this paper, an anonymous referee pointed out that the pattern of empty and filled circles in Figure 4 may also be derived using the theory of spherical designs [18]. In general, 4D spherical harmonics of degree k generate a -dimensional representation of the group [18]. Such a representation is equivalent to the -dimensional representation constructed in Equation 48, with . A spherical t-design in 4 dimensions is defined as a subset of the hypersphere for which all the 4D spherical harmonics of degrees 1 to t average to 0 [18]. In other words, all the spherical moments of rank from 1 to vanish. In Reference [18] the largest values t of the spherical design have been derived to be 2 for the 5-cell, 3 for the 8-cell, 5 for the 24-cell, and 11 for the 600-cell, which correspond to in Figure 4.
The anonymous referee also pointed out that invariant theory may be used to prove that non-zero spherical moments in the column in Figure 4 may appear at ℓ values corresponding to any sum of 6’s, 10’s and 15’s and for all .
5. Euler Angles
In order to facilitate exploitation of these results, we provide explicit tables of Euler angles derived from the vertices of the regular 4-polytopes. The convention for the Euler angles is used throughout. All Euler angle sets are derived from 4-polytopes in their standard orientations, as defined in Table 3. Ambiguities of the form given in Equation 41 were always resolved by choosing solutions with . All angles are reduced to the interval 0 to by a modulo- operation.
Different Euler angle sets with the same spherical averaging properties may be constructed by applying an equal but arbitrary 4D isometry to all the quaternions underlying the set.
The set of Euler angles corresponding to the 5 vertices of the 5-cell is provided in Table 4. As shown in Figure 4, all first-rank spherical moments vanish for this set of Euler angles. Since the 5-cell lacks an inversion operation, the number of orientations is the same as the number of vertices in this case.
The sets of Euler angles corresponding to the 8 vertices of the 16-cell, and the 16 vertices of the 8-cell are provided in Table 5 and Table 6. As shown in Figure 4, all first-rank spherical moments vanish for these sets of Euler angles. The symmetry groups of both polytopes include an inversion operation, so the number of distinguishable orientations is therefore one-half the number of the vertices. Clearly the four rotations specified in Table 5 comprise the most economical way to set all first-rank spherical moments to zero.
The set of 12 Euler angles corresponding to the 24 vertices of the 24-cell is provided in Table 7. As shown in Figure 4, all first and second-rank spherical moments vanish for this Euler angle set.
The sets of 60 and 300 Euler angles corresponding to the vertices of the 600-cell and the 120-cell are provided in Table 8 and Table 9. Figure 4 shows that all spherical moments up to and including rank 5 vanish for these Euler angle sets. The most economical way of annihilating spherical ranks up to and including rank 5 is therefore the 60-angle set in Table 8. This rotation set was previously described in Reference [24], where it was presented without any supporting theory.
It is worth pointing out that the 3D rotations discussed above for the 24-cell and the 600-cell have more inutitive descriptions. The set of Euler angles obtained from the vertices of the 24-cell generates exactly the 12 rotational symmetries of the tetrahedron, compare Table 7 with the last column for the group in Table 1. Similarly the set of Euler angles obtained from the vertices of the 600-cell generates exactly the 60 rotational symmetries of the icosahedron, compare Table 8 with the last column for the group in Table 1. The 24 rotational symmetries of the cube ( group) do not corresond to any regular 4-polytope. In fact they are not well distributed in the sense of particle repulsion over the hypersphere in 4D as the other polytopic cases. Regarding this last point, it has been rigorously proven that that some of the regular 4-polytopes (the 5-cell, the 16-cell and the 600-cell) minimize a full class of repulsive potentials over the 4D sphere [32].
6. Conclusions
We expect that these sets of rotations will be useful for the computation of orientational averages in a range of physical sciences, and in experimental procedures such as spherical tensor analysis in nuclear magnetic resonance [7,8,9]. In addition, we anticipate that where necessary, finer sampling of orientational space may be implemented by interpolating between the vertices of the polytopes, or by four-dimensional tiling and honeycomb schemes, such as those described by Coxeter [17].
Finally, we note that highly-symmetric four-dimensional figures have been found by using a computational procedure [33] which is closely related to the REPULSION algorithm on the surface of a sphere [3]. Such methods could be adapted to generate much larger sets of evenly spaced three-dimensional rotations than those described here.
Acknowledgements
This research was supported by EPSRC (UK) and the Basic Technology Research Program (UK). We thank Michael Tayler for discussions. We would like to thanks the referees for constructive and insightful comments.
References
- Mehring, M. High Resolution NMR in Solids, 2nd ed.; NMR-Basic Principles and Progress; Springer: Berlin, Germany, 1982; Volume 11. [Google Scholar]
- Levitt, M.H. Spin Dynamics. Basics of Nuclear Magnetic Resonance, 2nd ed.; Wiley: Chichester, UK, 2007. [Google Scholar]
- Bak, M.; Nielsen, N.C. REPULSION, A Novel Approach to Efficient Powder Averaging in Solid-State NMR. J. Magn. Reson. 1997, 125, 132–139. [Google Scholar] [CrossRef] [PubMed]
- Edén, M.; Levitt, M.H. Computation of Orientational Averages in Solid-State NMR by Gaussian Spherical Quadrature. J. Magn. Reson. 1998, 132, 220–239. [Google Scholar] [CrossRef] [PubMed]
- Edén, M. Computer simulations in solid-state NMR. III. Powder averaging. Concepts Magn. Reson. 2003, 18A, 24–55. [Google Scholar] [CrossRef]
- Stevensson, B.; Edén, M. Efficient orientational averaging by the extension of Lebedev grids via regularized octahedral symmetry expansion. J. Magn. Reson. 2006, 181, 162–176. [Google Scholar] [CrossRef] [PubMed]
- Suter, D.; Pearson, J.G. Experimental Classification of Multi-Spin Coherence under the Full Rotation Group. Chem. Phys. Lett. 1988, 144, 328–332. [Google Scholar] [CrossRef]
- Van Beek, J.D.; Carravetta, M.; Antonioli, G.C.; Levitt, M.H. Spherical tensor analysis of nuclear magnetic resonance signals. J. Chem. Phys. 2005, 122, 244510. [Google Scholar] [CrossRef] [PubMed]
- Pileio, G.; Levitt, M.H. Isotropic filtering using polyhedral phase cycles: Application to singlet state NMR. J. Magn. Reson. 2008, 191, 148–155. [Google Scholar] [CrossRef] [PubMed]
- Varshalovich, D.A.; Moskalev, A.N.; Khersonskii, V.K. Quantum theory of angular momentum; World Scientific Publishing: Teaneck, NJ, USA, 1988. [Google Scholar]
- Samoson, A.; Sun, B.Q.; Pines, A. New angles in motional averaging. In Pulsed Magnetic Resonance: NMR, ESR, and Optics, A recognition of E. L. Hahn; Bagguley, D.M.S., Ed.; Oxford Science Publications: Oxford, UK, 1992. [Google Scholar]
- Emsley, J.L.; Schmidt-Rohr, K.; Pines, A. Group theory and NMR dynamics. In NMR and More: In Honour of Anatole Abragam; Goldman, M., Por, M., Eds.; Les Editions de Physique: Paris, France, 1994. [Google Scholar]
- Lebedev, V.I. Quadratures on a Sphere. Zh. Vychisl. Mat. mat. Fiz. 1975, 15, 48. [Google Scholar] [CrossRef]
- Lebedev, V.I. Quadratures on a Sphere. Zh. Vychisl. Mat. mat. Fiz. 1976, 16, 293. [Google Scholar] [CrossRef]
- Lebedev, V.I.; Skorokhodov, A.L. Quadrature Formulas of Orders 41, 47 and 53 for the Sphere. Russian Acad. Sci. Dokl. Math. 1992, 45, 587. [Google Scholar]
- Weissenstein, E.W. Regular Polychoron. http://mathworld.wolfram.com/RegularPolychoron.html (accessed on 6 July 2010).
- Coxeter, H.S.M. Regular Polytopes; Methuen: London, UK, 1948. [Google Scholar]
- Delsarte, P.; Goethals, J.M.; Jacob, S.J. Spherical codes and designs. Geom. Dedicata 1977, 6, 363–388. [Google Scholar] [CrossRef]
- Du Val, P. Homographies, quaternions and rotations; Oxford University Press: Oxford, UK, 1964. [Google Scholar]
- Frobenius, F. Über die Charaktere der symmetrischen Gruppe. Sitzungberichte der Königlich Preussischen Akademie der Wissenschaften zu Berlin 1900, 516–534. [Google Scholar]
- Veysseyre, R.; Weigel, D.; Phan, T.; Effantin, J.M. Crystallography, geometry and physics in higher dimensions. II. Point symmetry of holohedries of the two hypercubic crystal systems in four-dimensional space. Acta Cryst. Sec. A 1984, 40, 331–337. [Google Scholar] [CrossRef]
- Kondo, T. The characters of the Weyl group of type F4. J. Fac. Sci. Univ. Tokyo Sect. I 1965, 11, 145–153. [Google Scholar]
- Grove, L.C. The characters of the hecatonicosahedroidal group. J. Reine Angew. Math. 1974, 265, 160–169. [Google Scholar]
- Levitt, M.H. An Orientational Sampling Scheme for Magnetic Resonance based on a Four-Dimensional Polytope. In Future Directions in Magnetic Resonance; Khetrapal, C.L., Ed.; Springer: Berlin, Germany, 2010. [Google Scholar]
- Armstrong, M.A. Groups and Symmetry; Sringer-Verlag: New York, NY, USA, 1988. [Google Scholar]
- Herstein, I.N. Topics in algebra, 2nd ed.; Xerox College Publishing: Lexington, KY, USA, 1975. [Google Scholar]
- Cotton, A. Chemical Applications of Group Theory, 3rd ed.; Wiley: New York, NY, USA, 1990. [Google Scholar]
- Hamermesh, M. Group theory and its application to physical problems; Addison-Wesley: London, UK, 1962. [Google Scholar]
- Altmann, S.L. Rotations, quaternions, and double groups; Oxford University Press: New York, NY, USA, 1986. [Google Scholar]
- Wigner, E.P. Group theory and its application to the quantum mechanics of atomic spectra; Academic Press: New York, NY, USA, 1971. [Google Scholar]
- Wolfram, S. Mathematica: A System for Doing Mathematics by Computer; Addison-Wesley: New York, NY, USA, 1991. [Google Scholar]
- Cohn, H.; Kumar, A. Universally optimal distribution of points on spheres. J. Amer. Math. Soc. 2007, 20, 99–148. [Google Scholar] [CrossRef]
- Altschuler, E.L.; Perez-Garrido, A.; Stong, R. A Novel Symmetric Four Dimensional Polytope Found Using Optimization Strategies Inspired by Thomson’s Problem of Charges on a Sphere. 2008; arXiv:physics/0601139v1. [Google Scholar]
Figure 1.
The 3D regular convex polyhedra organised according to their symmetry group. Here is the number of vertices, is the number of edges and is the number of faces constituting the solid.
Figure 1.
The 3D regular convex polyhedra organised according to their symmetry group. Here is the number of vertices, is the number of edges and is the number of faces constituting the solid.

Figure 2.
Spherical rank profiles for the regular convex 3D polyhedra. Open circles indicate that all spherical moments of integer rank ℓ are zero for the set of orientations corresponding to the vertices of the corresponding polyhedron. Closed circles indicate that there is at least one non-zero spherical moment of rank ℓ.
Figure 2.
Spherical rank profiles for the regular convex 3D polyhedra. Open circles indicate that all spherical moments of integer rank ℓ are zero for the set of orientations corresponding to the vertices of the corresponding polyhedron. Closed circles indicate that there is at least one non-zero spherical moment of rank ℓ.

Figure 3.
A list of the 4D regular convex polytopes organized according to their symmetry group. Here is the number of vertices, is the number of edges, is the number of faces and is the number of three dimensional cells. The two dimensional graphs indicate the vertex connections.
Figure 3.
A list of the 4D regular convex polytopes organized according to their symmetry group. Here is the number of vertices, is the number of edges, is the number of faces and is the number of three dimensional cells. The two dimensional graphs indicate the vertex connections.

Figure 4.
Spherical rank profiles of the regular convex 4-polytopes. Open circles indicate that all spherical moments of integer rank ℓ are zero for the set of orientations derived from the vertices of the corresponding polytope. Closed circles indicate that there is at least one non-zero spherical moment of rank ℓ.
Figure 4.
Spherical rank profiles of the regular convex 4-polytopes. Open circles indicate that all spherical moments of integer rank ℓ are zero for the set of orientations derived from the vertices of the corresponding polytope. Closed circles indicate that there is at least one non-zero spherical moment of rank ℓ.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The three symmetry point groups of the regular polyhedra. h is the number of symmetry elements in the group. The last column shows the number of elements in each class (in square parentheses), followed by a single symmetry element of the class, for a polyhedron in standard orientation. The symbol indicates a rotation through the angle about the axis . The symbol indicates the improper operation constructed by the proper rotation followed by the inversion operation. is the identity operation and is the inversion operation. The symbol indicates the golden ratio.
Table 1.
The three symmetry point groups of the regular polyhedra. h is the number of symmetry elements in the group. The last column shows the number of elements in each class (in square parentheses), followed by a single symmetry element of the class, for a polyhedron in standard orientation. The symbol indicates a rotation through the angle about the axis . The symbol indicates the improper operation constructed by the proper rotation followed by the inversion operation. is the identity operation and is the inversion operation. The symbol indicates the golden ratio.
| Symmetry group | h | Symmetry operations |
| 24 | ||
| 48 | ||
| 120 |
Table 2.
The four symmetry groups of the 4D regular polytopes. h denotes the total number of symmetry elements. The last column shows the number of elements in each class (in square parentheses), followed by a single symmetry element of the class, for a polytope in standard orientation. The symmetry elements are denoted for a proper rotation and for an improper rotation, see Equations 42 and 43. The quaternions are given explicitly in the last section.
Table 2.
The four symmetry groups of the 4D regular polytopes. h denotes the total number of symmetry elements. The last column shows the number of elements in each class (in square parentheses), followed by a single symmetry element of the class, for a polytope in standard orientation. The symmetry elements are denoted for a proper rotation and for an improper rotation, see Equations 42 and 43. The quaternions are given explicitly in the last section.
| Symmetry group | h | Symmetry operations |
| 120 | ||
| 384 | ||
| 1152 | ||
| 14 400 | ||
Table 3.
The coordinates of the six convex regular 4-polytopes vertices in standard orientation, as reported in Reference [19]. The double round parentheses indicate that all even permutations of the quartet are taken. The symbols and take the values and . The 600 vertices of the hyperdodecahedron are obtained by multiplying the quaternion with all possible quaternion products of the 5 vertices of the hypertetrahedron S and the 120 vertices of the hypericosahedron I. All the polytopes are centred at the origin of the coordinate system, with the vertices lying on the hypersphere of radius 1.
Table 3.
The coordinates of the six convex regular 4-polytopes vertices in standard orientation, as reported in Reference [19]. The double round parentheses indicate that all even permutations of the quartet are taken. The symbols and take the values and . The 600 vertices of the hyperdodecahedron are obtained by multiplying the quaternion with all possible quaternion products of the 5 vertices of the hypertetrahedron S and the 120 vertices of the hypericosahedron I. All the polytopes are centred at the origin of the coordinate system, with the vertices lying on the hypersphere of radius 1.
| Name | Vertex Coordinates |
| 5-cell or hypertetrahedron | |
| 16-cell or hyperoctahedron | |
| 8-cell or hypercube | |
| 24-cell | |
| 600-cell or hypericosahedron | |
| 120-cell or hyperdodecahedron |
Table 4.
The set of Euler angles (in degrees) corresponding to the 5 vertices S of the 5-cell whose cartesian coordinates are given in Table 3.
Table 4.
The set of Euler angles (in degrees) corresponding to the 5 vertices S of the 5-cell whose cartesian coordinates are given in Table 3.
| 0 | 0 | 0 |
| 69.0948 | 104.478 | 159.095 |
| 110.905 | 104.478 | 20.9052 |
| 249.095 | 104.478 | 339.095 |
| 290.905 | 104.478 | 200.905 |
Table 5.
The set of Euler angles (in degrees) corresponding to the 8 vertices V of the 16-cell whose cartesian coordinates are given in Table 3. The 8 vertices are reduced to 4 sets of Euler angles because each quaternion pair corresponds to the same geometrical 3D rotation.
Table 5.
The set of Euler angles (in degrees) corresponding to the 8 vertices V of the 16-cell whose cartesian coordinates are given in Table 3. The 8 vertices are reduced to 4 sets of Euler angles because each quaternion pair corresponds to the same geometrical 3D rotation.
| 0 | 0 | 0 |
| 0 | 180 | 0 |
| 180 | 0 | 0 |
| 180 | 180 | 0 |
Table 6.
The set of Euler angles (in degrees) corresponding to the 16 vertices W of the 8-cell whose cartesian coordinates are given in Table 3. The 16 vertices are reduced to 8 sets of Euler angles because each quaternion pair corresponds to the same geometrical 3D rotation.
Table 6.
The set of Euler angles (in degrees) corresponding to the 16 vertices W of the 8-cell whose cartesian coordinates are given in Table 3. The 16 vertices are reduced to 8 sets of Euler angles because each quaternion pair corresponds to the same geometrical 3D rotation.
| 0 | 90 | 90 |
| 0 | 90 | 270 |
| 90 | 90 | 0 |
| 90 | 90 | 180 |
| 180 | 90 | 90 |
| 180 | 90 | 270 |
| 270 | 90 | 0 |
| 270 | 90 | 180 |
Table 7.
The set of Euler angles (in degrees) corresponding to the 24 vertices T of the 24-cell whose cartesian coordinates are given in Table 3. The 24 vertices are reduced to 12 sets of Euler angles because each quaternion pair corresponds to the same geometrical 3D rotation.
Table 7.
The set of Euler angles (in degrees) corresponding to the 24 vertices T of the 24-cell whose cartesian coordinates are given in Table 3. The 24 vertices are reduced to 12 sets of Euler angles because each quaternion pair corresponds to the same geometrical 3D rotation.
| 0 | 0 | 0 | 180 | 0 | 0 |
| 0 | 90 | 90 | 180 | 90 | 90 |
| 0 | 90 | 270 | 180 | 90 | 270 |
| 0 | 180 | 0 | 180 | 180 | 0 |
| 90 | 90 | 0 | 270 | 90 | 0 |
| 90 | 90 | 180 | 270 | 90 | 180 |
Table 8.
The set of Euler angles (in degrees) corresponding to the 120 vertices I of the 600-cell whose cartesian coordinates are given in Table 3. The 120 vertices are reduced to 60 sets of Euler angles because each quaternion pair corresponds to the same geometrical 3D rotation.
Table 8.
The set of Euler angles (in degrees) corresponding to the 120 vertices I of the 600-cell whose cartesian coordinates are given in Table 3. The 120 vertices are reduced to 60 sets of Euler angles because each quaternion pair corresponds to the same geometrical 3D rotation.
| 0 | 0 | 0 | 180 | 0 | 0 |
| 0 | 90 | 90 | 180 | 90 | 90 |
| 0 | 90 | 270 | 180 | 90 | 270 |
| 0 | 180 | 0 | 180 | 180 | 0 |
| 20.9052 | 60 | 200.905 | 200.905 | 60 | 20.9052 |
| 20.9052 | 120 | 159.095 | 200.905 | 60 | 200.905 |
| 20.9052 | 60 | 20.9052 | 200.905 | 120 | 159.095 |
| 20.9052 | 120 | 339.095 | 200.905 | 120 | 339.095 |
| 58.2826 | 36 | 58.2826 | 238.283 | 36 | 58.2826 |
| 58.2826 | 36 | 238.283 | 238.283 | 36 | 238.283 |
| 58.2826 | 72 | 121.717 | 238.283 | 72 | 121.717 |
| 58.2826 | 72 | 301.717 | 238.283 | 72 | 301.717 |
| 58.2826 | 108 | 58.2826 | 238.283 | 108 | 58.2826 |
| 58.2826 | 108 | 238.283 | 238.283 | 108 | 238.283 |
| 58.2826 | 144 | 121.717 | 238.283 | 144 | 121.717 |
| 58.2826 | 144 | 301.717 | 238.283 | 144 | 301.717 |
| 90 | 90 | 0 | 270 | 90 | 0 |
| 90 | 90 | 180 | 270 | 90 | 180 |
| 121.717 | 36 | 121.717 | 301.717 | 36 | 121.717 |
| 121.717 | 36 | 301.717 | 301.717 | 36 | 301.717 |
| 121.717 | 72 | 58.2826 | 301.717 | 72 | 58.2826 |
| 121.717 | 72 | 238.283 | 301.717 | 72 | 238.283 |
| 121.717 | 108 | 121.717 | 301.717 | 108 | 121.717 |
| 121.717 | 108 | 301.717 | 301.717 | 108 | 301.717 |
| 121.717 | 144 | 58.2826 | 301.717 | 144 | 58.2826 |
| 121.717 | 144 | 238.283 | 301.717 | 144 | 238.283 |
| 159.095 | 60 | 159.095 | 339.095 | 60 | 159.095 |
| 159.095 | 60 | 339.095 | 339.095 | 60 | 339.095 |
| 159.095 | 120 | 20.9052 | 339.095 | 120 | 20.9052 |
| 159.095 | 120 | 200.905 | 339.095 | 120 | 200.905 |
Table 9.
The set of Euler angles (in degrees) corresponding to the 600 vertices J of the 120-cell whose cartesian coordinates are given in Table 3. The 600 vertices are reduced to 300 sets of Euler angles because each quaternion pair corresponds to the same geometrical 3D rotation.
Table 9.
The set of Euler angles (in degrees) corresponding to the 600 vertices J of the 120-cell whose cartesian coordinates are given in Table 3. The 600 vertices are reduced to 300 sets of Euler angles because each quaternion pair corresponds to the same geometrical 3D rotation.
| 0 | 90 | 0 | 90 | 90 | 90 | 180 | 90 | 0 | 270 | 90 | 90 |
| 0 | 90 | 180 | 90 | 90 | 270 | 180 | 90 | 180 | 270 | 90 | 270 |
| 7.25597 | 49.1176 | 70.6909 | 90 | 180 | 0 | 187.256 | 49.1176 | 70.6909 | 270 | 180 | 0 |
| 7.25597 | 49.1176 | 250.691 | 95.6599 | 75.5225 | 137.470 | 187.256 | 49.1176 | 250.691 | 275.660 | 75.5225 | 137.470 |
| 7.25597 | 130.882 | 109.309 | 95.6599 | 75.5225 | 317.471 | 187.256 | 130.882 | 109.309 | 275.660 | 75.5225 | 317.471 |
| 7.25597 | 130.882 | 289.309 | 95.6599 | 104.478 | 42.5298 | 187.256 | 130.882 | 289.309 | 275.660 | 104.478 | 42.5298 |
| 14.5454 | 84.5204 | 131.110 | 95.6599 | 104.478 | 222.530 | 194.546 | 84.5204 | 131.110 | 275.660 | 104.478 | 222.530 |
| 14.5454 | 84.5204 | 311.110 | 98.3008 | 41.4096 | 98.3008 | 194.546 | 84.5204 | 311.110 | 278.301 | 41.4096 | 98.3008 |
| 14.5454 | 95.4796 | 48.8895 | 98.3008 | 41.4096 | 278.301 | 194.546 | 95.4796 | 48.8895 | 278.301 | 41.4096 | 278.301 |
| 14.5454 | 95.4796 | 228.890 | 98.3008 | 138.590 | 81.6992 | 194.546 | 95.4796 | 228.890 | 278.301 | 138.590 | 81.6992 |
| 20.9052 | 15.5225 | 20.9052 | 98.3008 | 138.590 | 261.699 | 200.905 | 15.5225 | 20.9052 | 278.301 | 138.590 | 261.699 |
| 20.9052 | 15.5225 | 200.905 | 105.450 | 69.7882 | 105.450 | 200.905 | 15.5225 | 200.905 | 285.450 | 69.7882 | 105.450 |
| 20.9052 | 44.4775 | 159.095 | 105.450 | 69.7882 | 285.450 | 200.905 | 44.4775 | 159.095 | 285.450 | 69.7882 | 285.450 |
| 20.9052 | 44.4775 | 339.095 | 105.450 | 110.212 | 74.5496 | 200.905 | 44.4775 | 339.095 | 285.450 | 110.212 | 74.5496 |
| 20.9052 | 60 | 110.905 | 105.450 | 110.212 | 254.550 | 200.905 | 60 | 110.905 | 285.450 | 110.212 | 254.550 |
| 20.9052 | 60 | 290.905 | 109.309 | 49.1176 | 172.744 | 200.905 | 60 | 290.905 | 289.309 | 49.1176 | 172.744 |
| 20.9052 | 75.5225 | 159.095 | 109.309 | 49.1176 | 352.7441 | 200.905 | 75.5225 | 159.095 | 289.309 | 49.1176 | 352.7441 |
| 20.9052 | 75.5225 | 339.095 | 109.309 | 130.882 | 7.25597 | 200.905 | 75.5225 | 339.095 | 289.309 | 130.882 | 7.25597 |
| 20.9052 | 104.478 | 20.9052 | 109.309 | 130.882 | 187.256 | 200.905 | 104.478 | 20.9052 | 289.309 | 130.882 | 187.256 |
| 20.9052 | 104.478 | 200.905 | 110.905 | 60 | 20.9052 | 200.905 | 104.478 | 200.905 | 290.905 | 60 | 20.9052 |
| 20.9052 | 120 | 69.0948 | 110.905 | 60 | 200.905 | 200.905 | 120 | 69.0948 | 290.905 | 60 | 200.905 |
| 20.9052 | 120 | 249.095 | 110.905 | 120 | 159.095 | 200.905 | 120 | 249.095 | 290.905 | 120 | 159.095 |
| 20.9052 | 135.522 | 20.9052 | 110.905 | 120 | 339.095 | 200.905 | 135.522 | 20.9052 | 290.905 | 120 | 339.095 |
| 20.9052 | 135.522 | 200.905 | 121.717 | 36 | 31.7175 | 200.905 | 135.522 | 200.905 | 301.717 | 36 | 31.7175 |
| 20.9052 | 164.478 | 159.095 | 121.717 | 36 | 211.717 | 200.905 | 164.478 | 159.095 | 301.717 | 36 | 211.717 |
| 20.9052 | 164.478 | 339.095 | 121.717 | 72 | 148.283 | 200.905 | 164.478 | 339.095 | 301.717 | 72 | 148.283 |
| 31.7175 | 36 | 121.717 | 121.717 | 72 | 328.283 | 211.717 | 36 | 121.717 | 301.717 | 72 | 328.283 |
| 31.7175 | 36 | 301.717 | 121.717 | 108 | 31.7175 | 211.717 | 36 | 301.717 | 301.717 | 108 | 31.7175 |
| 31.7175 | 72 | 58.2826 | 121.717 | 108 | 211.717 | 211.717 | 72 | 58.2826 | 301.717 | 108 | 211.717 |
| 31.7175 | 72 | 238.283 | 121.717 | 144 | 148.283 | 211.717 | 72 | 238.283 | 301.717 | 144 | 148.283 |
| 31.7175 | 108 | 121.717 | 121.717 | 144 | 328.283 | 211.717 | 108 | 121.717 | 301.717 | 144 | 328.283 |
| 31.7175 | 108 | 301.717 | 131.110 | 84.5204 | 14.5454 | 211.717 | 108 | 301.717 | 311.110 | 84.5204 | 14.5454 |
| 31.7175 | 144 | 58.2826 | 131.110 | 84.5204 | 194.546 | 211.717 | 144 | 58.2826 | 311.110 | 84.5204 | 194.546 |
| 31.7175 | 144 | 238.283 | 131.110 | 95.4796 | 165.455 | 211.717 | 144 | 238.283 | 311.110 | 95.4796 | 165.455 |
| 35.8898 | 25.2428 | 35.8898 | 131.110 | 95.4796 | 345.455 | 215.890 | 25.2428 | 35.8898 | 311.110 | 95.4796 | 345.455 |
| 35.8898 | 25.2428 | 215.890 | 137.470 | 75.5225 | 95.6599 | 215.890 | 25.2428 | 215.890 | 317.471 | 75.5225 | 95.6599 |
| 35.8898 | 154.757 | 144.110 | 137.470 | 75.5225 | 275.660 | 215.890 | 154.757 | 144.110 | 317.471 | 75.5225 | 275.660 |
| 35.8898 | 154.757 | 324.110 | 137.470 | 104.478 | 84.3401 | 215.890 | 154.757 | 324.110 | 317.471 | 104.478 | 84.3401 |
| 42.5298 | 75.5225 | 84.3401 | 137.470 | 104.478 | 264.340 | 222.530 | 75.5225 | 84.3401 | 317.471 | 104.478 | 264.340 |
| 42.5298 | 75.5225 | 264.340 | 144.110 | 25.2428 | 144.110 | 222.530 | 75.5225 | 264.340 | 324.110 | 25.2428 | 144.110 |
| 42.5298 | 104.478 | 95.6599 | 144.110 | 25.2428 | 324.110 | 222.530 | 104.478 | 95.6599 | 324.110 | 25.2428 | 324.110 |
| 42.5298 | 104.478 | 275.660 | 144.110 | 154.757 | 35.8898 | 222.530 | 104.478 | 275.660 | 324.110 | 154.757 | 35.8898 |
| 48.8895 | 84.5204 | 165.455 | 144.110 | 154.757 | 215.890 | 228.890 | 84.5204 | 165.455 | 324.110 | 154.757 | 215.890 |
| 48.8895 | 84.5204 | 345.455 | 148.283 | 36 | 58.2826 | 228.890 | 84.5204 | 345.455 | 328.283 | 36 | 58.2826 |
| 48.8895 | 95.4796 | 14.5454 | 148.283 | 36 | 238.283 | 228.890 | 95.4796 | 14.5454 | 328.283 | 36 | 238.283 |
| 48.8895 | 95.4796 | 194.546 | 148.283 | 72 | 121.717 | 228.890 | 95.4796 | 194.546 | 328.283 | 72 | 121.717 |
| 58.2826 | 36 | 148.283 | 148.283 | 72 | 301.717 | 238.283 | 36 | 148.283 | 328.283 | 72 | 301.717 |
| 58.2826 | 36 | 328.283 | 148.283 | 108 | 58.2826 | 238.283 | 36 | 328.283 | 328.283 | 108 | 58.2826 |
| 58.2826 | 72 | 31.7175 | 148.283 | 108 | 238.283 | 238.283 | 72 | 31.7175 | 328.283 | 108 | 238.283 |
| 58.2826 | 72 | 211.717 | 148.283 | 144 | 121.717 | 238.283 | 72 | 211.717 | 328.283 | 144 | 121.717 |
| 58.2826 | 108 | 148.283 | 148.283 | 144 | 301.717 | 238.283 | 108 | 148.283 | 328.283 | 144 | 301.717 |
| 58.2826 | 108 | 328.283 | 159.095 | 15.5225 | 159.095 | 238.283 | 108 | 328.283 | 339.095 | 15.5225 | 159.095 |
| 58.2826 | 144 | 31.7175 | 159.095 | 15.5225 | 339.095 | 238.283 | 144 | 31.7175 | 339.095 | 15.5225 | 339.095 |
| 58.2826 | 144 | 211.717 | 159.095 | 44.4775 | 20.9052 | 238.283 | 144 | 211.717 | 339.095 | 44.4775 | 20.9052 |
| 69.0948 | 60 | 159.095 | 159.095 | 44.4775 | 200.905 | 249.095 | 60 | 159.095 | 339.095 | 44.4775 | 200.905 |
| 69.0948 | 60 | 339.095 | 159.095 | 60 | 69.0948 | 249.095 | 60 | 339.095 | 339.095 | 60 | 69.0948 |
| 69.0948 | 120 | 20.9052 | 159.095 | 60 | 249.095 | 249.095 | 120 | 20.9052 | 339.095 | 60 | 249.095 |
| 69.0948 | 120 | 200.905 | 159.095 | 75.5225 | 20.9052 | 249.095 | 120 | 200.905 | 339.095 | 75.5225 | 20.9052 |
| 70.6909 | 49.1176 | 7.25597 | 159.095 | 75.5225 | 200.905 | 250.691 | 49.1176 | 7.25597 | 339.095 | 75.5225 | 200.905 |
| 70.6909 | 49.1176 | 187.256 | 159.095 | 104.478 | 159.095 | 250.691 | 49.1176 | 187.256 | 339.095 | 104.478 | 159.095 |
| 70.6909 | 130.882 | 172.744 | 159.095 | 104.478 | 339.095 | 250.691 | 130.882 | 172.744 | 339.095 | 104.478 | 339.095 |
| 70.6909 | 130.882 | 352.7441 | 159.095 | 120 | 110.905 | 250.691 | 130.882 | 352.7441 | 339.095 | 120 | 110.905 |
| 74.5496 | 69.7882 | 74.5496 | 159.095 | 120 | 290.905 | 254.550 | 69.7882 | 74.5496 | 339.095 | 120 | 290.905 |
| 74.5496 | 69.7882 | 254.550 | 159.095 | 135.522 | 159.095 | 254.550 | 69.7882 | 254.550 | 339.095 | 135.522 | 159.095 |
| 74.5496 | 110.212 | 105.450 | 159.095 | 135.522 | 339.095 | 254.550 | 110.212 | 105.450 | 339.095 | 135.522 | 339.095 |
| 74.5496 | 110.212 | 285.450 | 159.095 | 164.478 | 20.9052 | 254.550 | 110.212 | 285.450 | 339.095 | 164.478 | 20.9052 |
| 81.6992 | 41.4096 | 81.6992 | 159.095 | 164.478 | 200.905 | 261.699 | 41.4096 | 81.6992 | 339.095 | 164.478 | 200.905 |
| 81.6992 | 41.4096 | 261.699 | 165.455 | 84.5204 | 48.8895 | 261.699 | 41.4096 | 261.699 | 345.455 | 84.5204 | 48.8895 |
| 81.6992 | 138.590 | 98.3008 | 165.455 | 84.5204 | 228.890 | 261.699 | 138.590 | 98.3008 | 345.455 | 84.5204 | 228.890 |
| 81.6992 | 138.590 | 278.301 | 165.455 | 95.4796 | 131.110 | 261.699 | 138.590 | 278.301 | 345.455 | 95.4796 | 131.110 |
| 84.3401 | 75.5225 | 42.5298 | 165.455 | 95.4796 | 311.110 | 264.340 | 75.5225 | 42.5298 | 345.455 | 95.4796 | 311.110 |
| 84.3401 | 75.5225 | 222.530 | 172.744 | 49.1176 | 109.309 | 264.340 | 75.5225 | 222.530 | 352.7441 | 49.1176 | 109.309 |
| 84.3401 | 104.478 | 137.470 | 172.744 | 49.1176 | 289.309 | 264.340 | 104.478 | 137.470 | 352.7441 | 49.1176 | 289.309 |
| 84.3401 | 104.478 | 317.471 | 172.744 | 130.882 | 70.6909 | 264.340 | 104.478 | 317.471 | 352.7441 | 130.882 | 70.6909 |
| 90 | 0 | 0 | 172.744 | 130.882 | 250.691 | 270 | 0 | 0 | 352.7441 | 130.882 | 250.691 |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an Open Access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/.)
Share and Cite
MDPI and ACS Style
Mamone, S.; Pileio, G.; Levitt, M.H. Orientational Sampling Schemes Based on Four Dimensional Polytopes. Symmetry 2010, 2, 1423-1449. https://0-doi-org.brum.beds.ac.uk/10.3390/sym2031423
AMA Style
Mamone S, Pileio G, Levitt MH. Orientational Sampling Schemes Based on Four Dimensional Polytopes. Symmetry. 2010; 2(3):1423-1449. https://0-doi-org.brum.beds.ac.uk/10.3390/sym2031423
Chicago/Turabian StyleMamone, Salvatore, Giuseppe Pileio, and Malcolm H. Levitt. 2010. "Orientational Sampling Schemes Based on Four Dimensional Polytopes" Symmetry 2, no. 3: 1423-1449. https://0-doi-org.brum.beds.ac.uk/10.3390/sym2031423